Устройство для периодического контроля жесткой направляющей для клети - RU2693370C1
Код документа: RU2693370C1
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[001] Настоящее изобретение относится к области шахтного подъемного оборудования и в частности к устройству и способу для летучего контроля прохода с жесткой клетью.
СУЩЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[002] В настоящее время летучий контроль прохода с жесткой клетью на угольных шахтах в Китае осуществляется главным образом силами технического персонала. Автоматизированное автономное контрольное оборудование практически отсутствует, поэтому точность контроля дефектов в проходах с жесткой клетью, как правило, низкая. При достижении определенной степени наклона и деформации прохода с жесткой клетью снижается эффективность работы подъемной системы, что представляет риск для сохранности подъемной системы и безопасности работы. В особо серьезных случаях это может даже привести к сходу контейнера с направляющих, зажиму и обрыву клети.
[003] По мере увеличения глубины разработки угольных пластов среди ученых на в Китае и за его пределами ведется дискуссия об оптимальной форме сечения шахтного ствола. В качестве оптимального решения предлагается использовать шахтные стволы круглого сечения. Некоторые исследователи утверждают, что в зависимости от глубины разработки и давления в пласте целесообразнее использовать шахтные стволы цилиндрической формы эллипсоидного или многоугольного сечения, так. чтобы на стенки ствола оказывалось минимальное давление. При работе с такими шахтными стволами сложно добиться установки прохода с жесткой клетью таким образом, чтобы расстояние от краев прохода до определенной точки было одинаковым. В таких случаях возрастает вероятность деформации прохода с жесткой клетью под действием внешних факторов. Поэтому при контроле безопасности на угольных шахтах важно обеспечить точность контроля в реальном времени и своевременность устранения дефектов прохода с жесткой клетью.
КРАТКОЕ ОПИСАНИЕ
[004] Задача настоящего изобретения заключается в том, чтобы предложить устройство и способ летучего контроля прохода с жесткой клетью для обнаружения рассогласования и дефектов наклона прохода с жесткой клетью из холодногнутого трубопроката квадратного сечения на подъемных системах в шахтах глубокого залегания.
[005] Для достижения поставленной задачи в настоящем изобретении применяется следующее техническое решение. Устройство для летучего контроля прохода с жесткой клетью состоит из главной нижней платформы, на которой установлены движущийся элемент, передающий элемент, приводной элемент, направляющий элемент и кожух;
[006] кожух расположен в средней части главной нижней платформы, приводной элемент расположен внутри кожуха и состоит из датчика наклона и датчика давления, которые соединены с микроконтроллером, а микроконтроллер в свою очередь соединен с приводом, при этом привод подключен к бесщеточному двигателю постоянного тока, а выходной вал бесщеточного двигателя постоянного тока оснащен оптическим кодировщиком, который соединен с приводом;
[007] движущийся элемент состоит из приводящего выходного вала переднего колеса, приводимого выходного вала переднего колеса, приводящего выходного вала заднего колеса и приводимого выходного вала заднего колеса, при этом приводящий выходной вал переднего колеса и приводимый выходной вал переднего колеса расположены с переднего торца главной нижней платформы, а приводящий выходной вал заднего колеса и приводимый выходной вал заднего колеса расположены с заднего торца главной нижней платформы, на приводящем выходном валу переднего колеса, приводимом выходном валу переднего колеса, приводящем выходном валу заднего колеса и приводимом выходном валу заднего колеса имеется по борту для крепления колеса, который крепится к втулке колеса, внутри которой имеется постоянный магнит, а с внешней стороны – резиновое покрытие;
[008] передающий элемент состоит из червяка, который соединяется с выходным валом бесщеточного двигателя постоянного тока, червячной шестерни, установленной на приводящем выходном валу переднего колеса и приводящем выходном валу заднего колеса и зацепляющейся за червяк, шкивов синхронизации, установленных на приводящем выходном валу переднего колеса, приводимом выходном валу переднего колеса, приводящем выходном валу заднего колеса и приводимом выходном валу заднего колеса, ремня синхронизации, обмотанного вокруг шкивов синхронизации на приводящем выходном валу переднего колеса и приводящем выходном валу заднего колеса;
[009] направляющий элемент состоит из направляющего колеса переднего колеса и направляющего колеса заднего колеса, при этом направляющее колесо переднего колеса и направляющее колесо заднего колеса установлены с внешней стороны втулки колеса.
[0010] Помимо этого, направляющее колесо переднего колеса 5-1 и направляющее колесо заднего колеса 5-7 шарнирно соединены с одним концом рамы направляющего колеса 5-2 через шарнирное отверстие, а другой конец рамы направляющего колеса 5-2 шарнирно соединен с направляющей опорой 5-6 через шарнирное отверстие, при этом направляющая опора 5-6 крепится к главной нижней платформе 1, один конец пружинной тяги 5-3 шарнирно соединен с направляющей опорой 5-6 через шарнирное отверстие, а другой конец пружинной тяги 5-3 проходит через эллипсоидное отверстие в средней части рамы направляющего колеса 5-2 и оснащен регулировочной гайкой 5-5, при этом на пружинной тяге 5-3 на муфту закреплена пружина 5-4 между регулировочной гайкой 5-5 и рамой направляющего колеса 5-2, а между регулировочной гайкой 5-5 и пружиной 5-4 также расположен датчик давления приводного элемента 4.
[0011] Помимо этого, ось направляющего колеса переднего колеса, приводящий выходной вал переднего колеса и приводимый выходной вал переднего колеса расположены в одной плоскости, а направляющее колесо заднего колеса, приводящий выходной вал заднего колеса и приводимый выходной вал заднего колеса также расположены в одной плоскости.
[0012] Помимо этого, болты на бортах для крепления колес соответствуют отверстиям под болты на приводящем выходном валу переднего колеса, приводимом выходном валу переднего колеса, приводящем выходном валу заднего колеса и приводимом выходном валу заднего колеса, шпонки на червячной шестерне соответствуют шпоночным пазам на приводящем выходном валу переднего колеса и приводящем выходном валу заднего колеса, а шкивы синхронизации закреплены на установочные винты относительно приводящего выходного вала переднего колеса, приводимого выходного вала переднего колеса, приводящего выходного вала заднего колеса и приводимого выходного вала переднего колеса.
[0013] Помимо этого, с одного конца приводящего выходного вала переднего колеса, приводимого выходного вала переднего колеса, приводящего выходного вала заднего колеса и приводимого выходного вала переднего колеса имеется резьба, при этом резьба соответствует контргайке, а другой конец приводящего выходного вала переднего колеса, приводимого выходного вала переднего колеса, приводящего выходного вала заднего колеса и приводимого выходного вала переднего колеса соответствует подшипнику A, при этом подшипник A закреплен на горизонтальное место для подшипника A, а средняя часть приводящего выходного вала переднего колеса, приводимого выходного вала переднего колеса, приводящего выходного вала заднего колеса и приводимого выходного вала переднего колеса соответствует подшипнику B, при этом подшипник B закреплен на горизонтальное место для подшипника B, а горизонтальное место для подшипника A и горизонтальное место для подшипника B крепятся к главной нижней платформе.
[0014] Помимо этого, приводящий выходной вал переднего колеса, приводимый выходной вал переднего колеса, приводящий выходной вал заднего колеса и приводимый выходной вал заднего колеса имеют выступ А для крепления и позиционирования шкива синхронизации, выступ B для крепления и позиционирования подшипника B и выступ C для крепления и позиционирования борта для колеса, при этом приводящий выходной вал переднего колеса и приводящий выходной вал заднего колеса также имеют выступ D для крепления и позиционирования червячной шестерни.
[0015] Помимо этого, с одного конца червяк соединен с выходным валом бесщеточного двигателя постоянного тока на жесткую муфту, при этом жесткая муфта неподвижно стыкуется с подшипником на вертикальном месте для подшипника A, а с другого конца червяк стыкуется с подшипником C, при этом подшипник C крепится к вертикальному месту для подшипника B.
[0016] Помимо этого, выход микроконтроллера соединен со входом привода с помощью широтно-импульсного модуля, а выход привода соединен с входом микроконтроллера с помощью UART-интерфейса.
[0017] Помимо этого, постоянный магнит состоит из восьми пар подмагнитов, изготовленных из сплава редкоземельного элемента неодима, железа и бора и собранных в соответствии с магнитной сборкой Халбаха, при этом угол между направлениями магнетизации двух смежных подмагнитов составляет 67.5 градусов.
[0018] Способ летучего контроля прохода с жесткой клетью с использованием устройства для летучего контроля, характеризующийся тем, что он включает в себя:
[0019] первый этап статистического расчета данных и периодического летучего контроля с регулируемой скоростью, на котором данные, полученные с помощью датчика наклона, оптического кодировщика и датчика давления во время работы устройства для летучего контроля, используются в качестве исходных данных, которые подвергаются обработке, а на основании обработанных данных выполняется проверка работы устройства для летучего контроля, при этом первый этап включает в себя следующие операции:
[0020] a. исходя из частоты сбора данных датчика наклона, оптического кодировщика и датчика давления, принятие интервала сбора данных датчика наклона, оптического кодировщика и датчика давления за временную последовательность в целях упорядочивания данных, сопоставление друг с другом значений углов наклона θzи θx, полученных от датчика наклона, значений скорости v, полученных от оптического кодировщика, и значений давления P1 и P2, полученных от датчика давления за каждый временной интервал сбора данных и ввод таких значений в управляющий компьютер в качестве исходных данных, при этом угол наклона θz представляет собой угол между осью y и плоскостью x-y, угол наклона θxпредставляет собой угол между осью y и плоскостью y-z, ось y параллельна проходу с жесткой клетью и перпендикулярна приводному выходному валу переднего колеса, ось x перпендикулярна приводному выходному валу переднего колеса и проходу с жесткой клетью, ось z перпендикулярна проходу с жесткой клетью и параллельна приводному выходному валу переднего колеса, скорость v соответствует рабочей скорости устройства для летучего контроля, давление P1 соответствует давлению, которое оказывает на проход с жесткой клетью направляющее колесо переднего колеса, а давление P2 соответствует давлению, которое оказывает на проход с жесткой клетью направляющее колесо заднего колеса;
[0021] b. последовательный сбор значений скорости v и времени контроля Δtза каждый интервал сбора данных для получения значения пробега, сравнение полученного значения пробега с (L1-L2), в случае если полученное значение меньше (L1-L2), автоматическое выполнение с помощью устройства для летучего контроля летучего контроля на высокой скорости, в случае если полученное значение больше (L1-L2), продолжение сбора и сравнения данных с L1, в случае если полученное значение больше (L1-L2), но меньше L1, выполнение с помощью устройства для летучего контроля летучего контроля на низкой скорости, а если полученное значение больше L1, удаление полученных данных и завершение цикла летучего контроля с регулируемой скоростью, при этом Δt – соответствует разнице между двумя смежными временными метками сбора данных, L1 соответствует общей длине отдельного сегмента прохода с жесткой клетью, а L2 – длина прохода при летучем контроле на высокой скорости на стыках концов отдельных сегментов прохода с жесткой клетью, которая измеряется вручную;
[0022] c. принятие последнего цикла летучего контроля за точку отсчета;
[0023] d. возврат к этапу b и его выполнение вплоть до завершения летучего контроля для всего объекта контроля и сохранение всех полученных данных;
[0024] второй этап расчета, на котором выполняется обработка статистических данных, включающий в себя следующие операции:
[0025] a. получение значений углов наклона θz и θx для каждого временного интервала сбора данных и расчет разницы между давлениями P1 и P2 для этой временной точки, определение, равна ли разница нулю, если разница равна нулю, подтверждение правильности расчета угла наклона θz, если разница не равна нулю, угол наклона θz неверен, а за значение угла принимается 0;
[0026] b. расчет относительного значения перемещения в направлении x, относительного значения перемещения в направлении y и относительного значения перемещения в направлении z для приводного выходного вала переднего колеса с учетом данных для приводимого выходного вала заднего колеса для каждого временного интервала сбора данных, при этом относительное значение перемещения в направлении x рассчитывается как расстояние между передним и задним колесами, умноженное на косинус угла наклона θz, а затем на синус угла наклона θx, относительное значение перемещения в направлении y рассчитывается как расстояние между передним и задним колесами, умноженное на косинус угла наклона θz, а затем на косинус угла наклона θx, а относительное значение перемещения в направлении z рассчитывается как расстояние между передним и задним колесами, умноженное на косинус угла наклона θx, а затем на синус угла наклона θz, где расстояние между передними и задними колесами соответствует значению отрезка между приводным выходным валом переднего колеса и приводимым выходным валом заднего колеса;
[0027] c. сохранение результатов расчетов и завершение расчетов всех данных;
[0028] третий этап сбора и сравнения данных, включающий в себя следующие операции:
[0029] a. подтверждение, что устройство для летучего контроля выполняет первый цикл летучего контроля, а абсолютные координаты приводного выходного вала переднего колеса известны для каждого временного интервала сбора данных, где направление x равняется 0, направление y соответствует совокупному значению скорости v, умноженному на время летучего контроля устройства летучего контроля, а направление z равняется 0, при условии, что это состояние соответствует исходному заключению контроля прохода с жесткой клетью об отсутствии дефектов после первого запуска;
[0030] b. выбор первого временного интервала сбора данных за первый цикл летучего контроля в качестве исходной точки отсчета;
[0031] c. последовательный сбор произведения скорости v и времени контроля Δt на каждом временном интервале сбора данных после исходной точки отсчета для получения пройденного расстояния, сравнение полученного пройденного расстояния с расстоянием между передними и задними колесами, определенным на этапе а, для определения времени контроля, соответствующего минимальному абсолютному значению разницы между пройденным расстоянием и расстоянием между передними и задними колесами, использование этого временного интервала сбора данных в качестве целевой точки контроля относительно исходной точки отсчета;
[0032] d. расчет абсолютных координат целевой точки контроля путем получения абсолютных координат по оси x, y и z для исходной точки отсчета и суммирование их с относительным значением перемещения по оси x, y и z соответственно для целевой точки контроля, определенных на подэтапе b второго этапа для получения абсолютных координат в направлении x, y и z соответственно для целевой точки контроля;
[0033] e. изменение временного интервала сбора данных после исходной точки отсчета согласно подэтапу с на исходную точку отсчета;
[0034] f. возврат к подэтапу b и его выполнение вплоть до расчета абсолютных координат для всех целевых точек контроля;
[0035] четвертый этап построения координат и отображения, на котором на управляющем компьютере строятся абсолютные координаты для каждой целевой точки контроля, завершение визуального контроля.
[0036] Полезный эффект: Устройство для летучего контроля прохода с жесткой клетью безопасно и надежно устанавливается на шахтную подъемную систему и не представляет потенциальных рисков для рабочего окружения угольной шахты. Оно позволяет ускорить процесс контроля прохода с жесткой клетью и сэкономить время, которое тратится на контроль оборудования, благодаря чему увеличивается производительность угольной шахты Используемый способ позволяет значительно увеличить точность летучего контроля прохода с жесткой клетью и устранить ошибки, связанные с работой в ручном режиме, что способствует повышению безопасности и надежности работы подъемной системы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0037] Фигура 1 – конструкционная схема устройства для летучего контроля согласно настоящему изобретению;
[0038] Фигура 2 – схема деталей нижней платформы устройства для летучего контроля согласно настоящему изобретению;
[0039] Фигура 3 – конструкционная блок-схема приводного элемента устройства для летучего контроля согласно настоящему изобретению;
[0040] Фигура 4 – монтажная схема устройства для летучего контроля согласно настоящему изобретению;
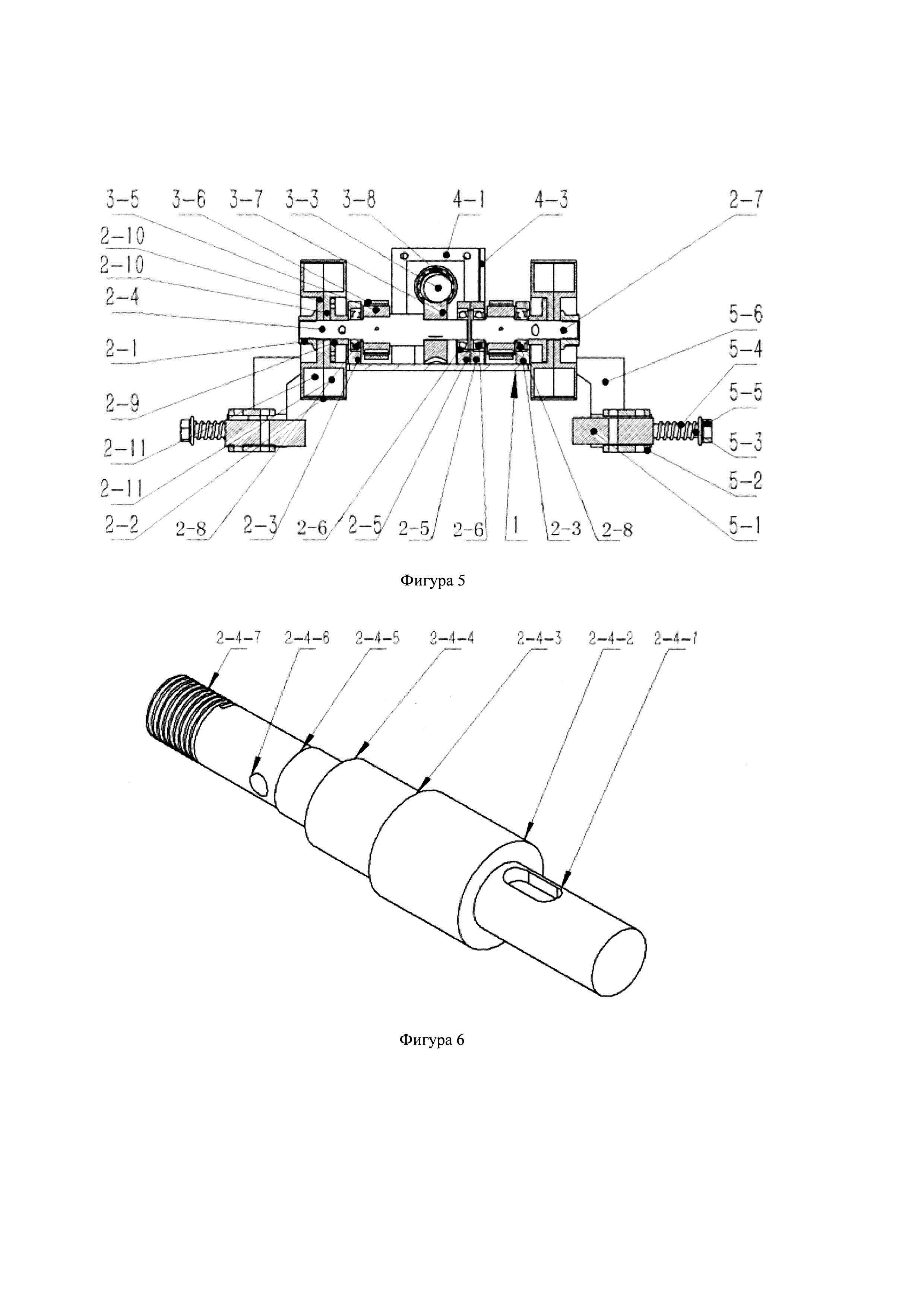
[0041] Фигура 5 – схематичный вид в разрезе устройства для летучего контроля согласно настоящему изобретению;
[0042] Фигура 6 – схема деталей приводного выходного вала устройства для летучего контроля согласно настоящему изобретению;
[0043] Фигура 7 – схема деталей приводимого выходного вала устройства для летучего контроля согласно настоящему изобретению;
[0044] Фигура 8 – схема деталей рамы направляющего колеса устройства для летучего контроля согласно настоящему изобретению;
[0045] Фигура 9 – конструктивная схема постоянного магнита устройства для летучего контроля согласно настоящему изобретению;
[0046] Фигура 10 – схема установки устройства для летучего контроля согласно настоящему изобретению;
[0047] Фигура 11 – схема способа обработки данных, полученных с устройства для летучего контроля согласно настоящему изобретению.
[0048] На чертежах: 1-главная нижняя платформа, 2-движущийся элемент, 2-1- контргайка, 2-2-резиновое покрытие, 2-3-горизонтальное место для подшипника B, 2-4-приводной выходной вал переднего колеса, 2-4-1-шпоночный паз, 2-4-2-выступ D, 2-4-3-выступ A, 2-4-4-выступ B, 2-4-5-выступ C, 2-4-6-отверстие под болт, 2-4-7-резьба, 2-5-горизонтальное место для подшипника A, 2-6-подшипник A, 2-7- приводимый выходной вал переднего колеса, 2-8-подшипник B, 2-9-борт для крепления колеса, 2-10-колесная втулка, 2-11-постоянный магнит, 2-11-1-подмагнит, 2-12- приводной выходной вал заднего колеса, 2-13- приводимый выходной вал заднего колеса; 3-передающий элемент, который включает в себя 3-1-вертикальное место для подшипника B, 3-2-червяк, 3-3-жесткая муфта, 3-4- вертикальное место для подшипника A, 3-5-шкив синхронизации, 3-6-ремень синхронизации, 3-7-червячная шестерня, 3-8-подшипник C, 4-приводной элемент, 4-1-кронштейн для двигателя, 4-2-бесщеточный двигатель постоянного тока, 4-3-привод, 5-направляющее колесо, 5-1-направляющее колесо переднего колеса, 5-2-рама направляющего колеса, 5-3-пружинная тяга, 5-4-пружина, 5-5-регулировочная гайка, 5-6-направляющая опора, 5-7-направляющее колесо заднего колеса; 6-кожух.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0049] Ниже приводится подробное описание предпочтительного варианта осуществления изобретения со ссылкой на прилагаемые чертежи.
[0050] Как показано на Фигуре 1, устройство для летучего контроля прохода с жесткой клетью согласно настоящему изобретению состоит из главной нижней платформы 1, на которой установлены движущийся элемент 2, передающий элемент 3, приводной элемент 4, направляющий элемент 5 и кожух 6.
[0051] Как показано на Фигуре 2, на главной нижней платформе 1 имеется несколько монтажных отверстий для соединения между различными элементами.
[0052] Как показано на Фигурах 3 и 4, кожух 6 расположен в средней части главной нижней платформы 1, приводной элемент 4 расположен внутри кожуха 6 и состоит из датчика наклона и датчика давления, которые соединены с микроконтроллером, а микроконтроллер в свою очередь соединен с приводом 4-3, при этом привод 4-3 подключен к бесщеточному двигателю постоянного тока 4-2, а выходной вал бесщеточного двигателя постоянного тока 4-2 оснащен оптическим кодировщиком, который соединен с приводом 4-3. Бесщеточный двигатель постоянного тока 4-2 крепится на кронштейн 4-1, а кронштейн 4-1 и привод 4-3 крепятся к бобышке на нижней платформе 1.
[0053] Питание на бесщеточный двигатель постоянного тока 4-2 поступает с внешнего источника питания через привод 4-3. Точное регулирование скорости двигателя обеспечивается благодаря датчику наклона. Для управления скоростью привода 4-3 микроконтроллер использует широтно-импульсную модуляцию, а данные о скорости двигателя для расчета и обнаружения дефектов получает через UART-интерфейс привода.
[0054] Как показано на Фигурах 4-7, движущийся элемент 2 состоит из приводящего выходного вала переднего колеса 2-4, приводимого выходного вала переднего колеса 2-7, приводящего выходного вала заднего колеса 2-12 и приводимого выходного вала заднего колеса 2-13, при этом приводящий выходной вал переднего колеса 2-4 и приводимый выходной вал переднего колеса 2-7 расположены с переднего торца главной нижней платформы 1, а приводящий выходной вал заднего колеса 2-12 и приводимый выходной вал заднего колеса 2-13 расположены с заднего торца главной нижней платформы 1, на приводящем выходном валу переднего колеса 2-4, приводимом выходном валу переднего колеса 2-7, приводящем выходном валу заднего колеса 2-12 и приводимом выходном валу заднего колеса 2-13 имеется по борту для крепления колеса 2-9, который крепится к втулке колеса 2-10, внутри которой имеется постоянный магнит, а с внешней стороны – резиновое покрытие 2-2.
[0055] Болты на бортах для крепления колес 2-9 соответствуют отверстиям под болты 2-4-6 на приводящем выходном валу переднего колеса 2-4, приводимом выходном валу переднего колеса 2-7, приводящем выходном валу заднего колеса 2-12 и приводимом выходном валу заднего колеса 2-13 и предназначены для позиционирования бортов для крепления колес 2-9 по оси. Шпонки на червячной шестерне 3-7 соответствуют шпоночным пазам 2-4-1 на приводящем выходном валу переднего колеса 2-4 и приводящем выходном валу заднего колеса 2-12 и предназначены для позиционирования червячной шестерни 3-7 по окружности. Шкивы синхронизации 3-5 закреплены на установочные винты относительно приводящего выходного вала переднего колеса 2-4, приводимого выходного вала переднего колеса 2-7, приводящего выходного вала заднего колеса 2-12 и приводимого выходного вала переднего колеса 2-13 и предназначены для позиционирования шкивов синхронизации 3-5 по окружности.
[0056] С одного конца приводящего выходного вала переднего колеса 2-4, приводимого выходного вала переднего колеса 2-7, приводящего выходного вала заднего колеса 2-12 и приводимого выходного вала переднего колеса 2-13 имеется резьба 2-4-7. Резьба 2-4-7 соответствует контргайке 2-1, а другой конец приводящего выходного вала переднего колеса 2-4, приводимого выходного вала переднего колеса 2-7, приводящего выходного вала заднего колеса 2-12 и приводимого выходного вала переднего колеса 2-13 соответствует подшипнику A 2-6. Подшипник A 2-6 закреплен на горизонтальное место для подшипника A 2-5. Средняя часть приводящего выходного вала переднего колеса 2-4, приводимого выходного вала переднего колеса 2-7, приводящего выходного вала заднего колеса 2-12 и приводимого выходного вала переднего колеса 2-13 соответствует подшипнику B 2-8. Подшипник B 2-8 закреплен на горизонтальное место для подшипника B 2-3, а горизонтальное место для подшипника A 2-5 и горизонтальное место для подшипника B 2-3 крепятся к главной нижней платформе 1.
[0057] Приводящий выходной вал переднего колеса 2-4, приводимый выходной вал переднего колеса 2-7, приводящий выходной вал заднего колеса 2-12 и приводимый выходной вал заднего колеса 2-13 имеют выступ A 2-4-3 для крепления и позиционирования шкива синхронизации 3-5, выступ B 2-4-4 для крепления и позиционирования подшипника B 2-8 и выступ C 2-4-5 для крепления и позиционирования борта для колеса 2-9, при этом приводящий выходной вал переднего колеса 2-4 и приводящий выходной вал заднего колеса 2-12 также имеют выступ D 2-4-2 для крепления и позиционирования червячной шестерни 3-7.
[0058] Как показано на Фигурах 4 и 5, передающий элемент 3 состоит из червяка 3-2, который соединяется с выходным валом бесщеточного двигателя постоянного тока 4-2, червячной шестерни 3-7, установленной на приводящем выходном валу переднего колеса 2-4 и приводящем выходном валу заднего колеса 2-12 и зацепляющейся за червяк 3-2, шкивов синхронизации 3-5, установленных на приводящем выходном валу переднего колеса 2-4, приводимом выходном валу переднего колеса 2-7, приводящем выходном валу заднего колеса 2-12 и приводимом выходном валу заднего колеса 2-13, ремня синхронизации 3-6, обмотанного вокруг шкивов синхронизации 3-5 на приводящем выходном валу переднего колеса 2-4 и приводящем выходном валу заднего колеса 2-12. С одного конца червяк 3-2 соединен с выходным валом бесщеточного двигателя постоянного тока 4-2 на жесткую муфту 3-3, при этом жесткая муфта 3-3 неподвижно стыкуется с подшипником на вертикальном месте для подшипника A 3-4, а с другого конца червяк 3-2 стыкуется с подшипником C 3-8, при этом подшипник C 3-8 крепится к вертикальному месту для подшипника B 3-1, а вертикальное место для подшипника A3-4 и вертикальное место для подшипника B3-1 крепятся к главной нижней платформе 1.
[0059] Шкивы синхронизации 3-5 на приводном выходном валу переднего колеса 2-4 и приводимом выходном валу заднего колеса 2-13 передают усилие по ремню синхронизации 3-6 от приводного элемента к движущемуся элементу. Шкивы синхронизации 3-5 на приводимом выходном валу переднего колеса 2-7 и приводном выходном валу заднего колеса 2-12 передают усилие по ремню синхронизации 3-6 в обратном направлении и приводят в движение устройство для летучего контроля с обеих сторон.
[0060] Как показано на Фигурах 4, 5 и 8, направляющий элемент 5 состоит из направляющего колеса переднего колеса 5-1 и направляющего колеса заднего колеса 5-7, при этом направляющее колесо переднего колеса 5-1 и направляющее колесо заднего колеса 5-7 установлены с внешней стороны втулки колеса 2-10.
[0061] Направляющее колесо переднего колеса 5-1 и направляющее колесо заднего колеса 5-7 шарнирно соединены с одним концом рамы направляющего колеса 5-2 через регулируемые шарнирные отверстия. Регулируемые шарнирные отверстия включают в себя основное шарнирное отверстие 5-2-3 и вспомогательное шарнирное отверстие 5-2-4. Другой конец рамы направляющего колеса 5-2 шарнирно соединен с направляющей опорой 5-6 через шарнирное отверстие 5-2-1. Направляющая опора 5-6 крепится к главной нижней платформе 1. Один конец пружинной тяги 5-3 шарнирно соединен с направляющей опорой 5-6 через шарнирное отверстие. Другой конец пружинной тяги 5-3 проходит через эллипсоидное отверстие 5-2-2 в средней части рамы направляющего колеса 5-2 и оснащен регулировочной гайкой 5-5. На пружинной тяге 5-3 на муфту закреплена пружина 5-4 между регулировочной гайкой 5-5 и рамой направляющего колеса 5-2, а между регулировочной гайкой 5-5 и пружиной 5-4 также расположен датчик давления приводного элемента 4.
[0062] Направляющее колесо переднего колеса 5-1 и направляющее колесо заднего колеса 5-7 шарнирно соединены с рамой направляющего колеса 5-2 с помощью основного шарнирного отверстия 5-2-3, что позволяет осуществлять контроль на большой ширине. Направляющее колесо переднего колеса 5-1 и направляющее колесо заднего колеса 5-7 шарнирно соединены с рамой направляющего колеса 5-2 с помощью вспомогательного шарнирного отверстия 5-2-4, что позволяет осуществлять контроль на малой ширине. Регулировочная гайка 5-5 позволяет изменить степень сжатия пружины 5-4 и изменить исходное давление между направляющим колесом переднего колеса 5-1, направляющим колесом заднего колеса 5-7 и объектом контроля для осуществления управления направляющими колесами в процессе контроля.
[0063] В настоящем варианте осуществления изобретения ось направляющего колеса переднего колеса 5-1, приводящий выходной вал переднего колеса 2-4 и приводимый выходной вал переднего колеса 2-7 расположены в одной плоскости, а направляющее колесо заднего колеса 5-7, приводящий выходной вал заднего колеса 2-12 и приводимый выходной вал заднего колеса 2-13 также расположены в одной плоскости.
[0064] Как показано на Фигуре 9, постоянный магнит 2-11 состоит из восьми пар подмагнитов 2-11-1, изготовленных из сплава редкоземельного элемента неодима, железа и бора и собранных в соответствии с магнитной сборкой Халбаха, при этом угол между направлениями магнетизации двух смежных подмагнитов 2-11-1 составляет 67.5 градусов.
[0065] Как показано на Фигурах 10 и 11, устройство для летучего контроля согласно настоящему изобретению установлено на проходе с жесткой клетью 7. Приводной элемент 4 передает усилие на движущийся элемент 2 через передающий элемент 3, а благодаря наличию движущегося элемента 2 и установочным характеристикам постоянного магнита 2-11 обеспечивается безопасность установки и работы устройства для летучего контроля. Направляющее колесо переднего колеса 5-1 и направляющее колесо заднего колеса 5-7 направляющего элемента 5 плотно прижимаются к проходу с жесткой клетью благодаря наличию регулируемой пружины 5-4. Устройство-детектор определяет скорость перемещения устройства для летучего контроля с помощью оптического кодировщика, а также положение и ориентацию в пространстве устройства для летучего контроля с помощью датчика наклона и диагностирует состояние контрольного объекта в режиме реального времени с помощью алгоритма детекции.
[0066] Как показано на Фигуре 11, способ летучего контроля прохода с жесткой клетью с использованием устройства для летучего контроля включает в себя следующие этапы:
[0067] первый этап статистического расчета данных и периодического летучего контроля с регулируемой скоростью, на котором данные, полученные с помощью датчика наклона, оптического кодировщика и датчика давления во время работы устройства для летучего контроля, используются в качестве исходных данных, которые подвергаются обработке, а на основании обработанных данных выполняется проверка работы устройства для летучего контроля, при этом первый этап включает в себя следующие операции:
[0068] a. исходя из частоты сбора данных датчика наклона, оптического кодировщика и датчика давления, принятие интервала сбора данных датчика наклона, оптического кодировщика и датчика давления за временную последовательность в целях упорядочивания данных, сопоставление друг с другом значений углов наклона θzи θx, полученных от датчика наклона, значений скорости v, полученных от оптического кодировщика, и значений давления P1 и P2, полученных от датчика давления за каждый временной интервал сбора данных и ввод таких значений в управляющий компьютер в качестве исходных данных, при этом угол наклона θz представляет собой угол между осью y и плоскостью x-y, угол наклона θxпредставляет собой угол между осью y и плоскостью y-z, ось y параллельна проходу с жесткой клетью и перпендикулярна приводному выходному валу переднего колеса, ось x перпендикулярна приводному выходному валу переднего колеса и проходу с жесткой клетью, ось z перпендикулярна проходу с жесткой клетью и параллельна приводному выходному валу переднего колеса, скорость v соответствует рабочей скорости устройства для летучего контроля, давление P1 соответствует давлению, которое оказывает на проход с жесткой клетью направляющее колесо переднего колеса, а давление P2 соответствует давлению, которое оказывает на проход с жесткой клетью направляющее колесо заднего колеса.
[0069] b. последовательный сбор значений скорости v и времени контроля Δtза каждый интервал сбора данных для получения значения пробега, сравнение полученного значения пробега с (L1-L2), в случае если полученное значение меньше (L1-L2), автоматическое выполнение с помощью устройства для летучего контроля летучего контроля на высокой скорости, в случае если полученное значение больше (L1-L2), продолжение сбора и сравнения данных с L1, в случае если полученное значение больше (L1-L2), но меньше L1, выполнение с помощью устройства для летучего контроля летучего контроля на низкой скорости, а если полученное значение больше L1, удаление полученных данных и завершение цикла летучего контроля с регулируемой скоростью, при этом Δt соответствует разнице между двумя смежными временными метками сбора данных, с учетом того, что проход с жесткой клетью обычно представляет собой несколько последовательно соединенных сегментов, а дефекты прохода, как правило, встречаются на стыках сегментов, летучий контроль на высокой скорости обычно выполняется в средней части прохода с жесткой клетью в целях экономии времени, а летучий контроль на высокой скорости выполняется ближе к стыкам сегментов прохода с жесткой клетью для большей точности, таким образом, L1 соответствует общей длине отдельного сегмента прохода с жесткой клетью, а L2 – длина прохода при летучем контроле на высокой скорости на стыках концов отдельных сегментов прохода с жесткой клетью, которая измеряется вручную;
[0070] c. принятие последнего цикла летучего контроля за точку отсчета;
[0071] d. возврат к этапу b и его выполнение вплоть до завершения летучего контроля для всего объекта контроля и сохранение всех полученных данных;
[0072] второй этап расчета, на котором выполняется обработка статистических данных, включающий в себя следующие операции:
[0073] a. получение значений углов наклона θz и θx для каждого временного интервала сбора данных и расчет разницы между давлениями P1 и P2 для этой временной точки, определение, равна ли разница нулю, если разница равна нулю, подтверждение правильности расчета угла наклона θz, если разница не равна нулю, угол наклона θz неверен, а за значение угла принимается 0;
[0074] b. расчет относительного значения перемещения в направлении x, относительного значения перемещения в направлении y и относительного значения перемещения в направлении z для приводного выходного вала переднего колеса с учетом данных для приводимого выходного вала заднего колеса для каждого временного интервала сбора данных, при этом относительное значение перемещения в направлении x рассчитывается как расстояние между передним и задним колесами, умноженное на косинус угла наклона θz, а затем на синус угла наклона θx, относительное значение перемещения в направлении y рассчитывается как расстояние между передним и задним колесами, умноженное на косинус угла наклона θz, а затем на косинус угла наклона θx, а относительное значение перемещения в направлении z рассчитывается как расстояние между передним и задним колесами, умноженное на косинус угла наклона θx, а затем на синус угла наклона θz, где расстояние между передними и задними колесами соответствует значению отрезка между приводным выходным валом переднего колеса и приводимым выходным валом заднего колеса;
[0075] c. сохранение результатов расчетов и завершение расчетов всех данных;
[0076] третий этап сбора и сравнения данных, включающий в себя следующие операции:
[0077] a. подтверждение, что устройство для летучего контроля выполняет первый цикл летучего контроля, а абсолютные координаты приводного выходного вала переднего колеса известны для каждого временного интервала сбора данных, где направление x равняется 0, направление y соответствует совокупному значению скорости v, умноженному на время летучего контроля устройства летучего контроля, а направление z равняется 0, при условии, что это состояние соответствует исходному заключению контроля прохода с жесткой клетью об отсутствии дефектов после первого запуска;
[0078] b. выбор первого временного интервала сбора данных за первый цикл летучего контроля в качестве исходной точки отсчета;
[0079] c. последовательный сбор произведения скорости v и времени контроля Δt на каждом временном интервале сбора данных после исходной точки отсчета для получения пройденного расстояния, сравнение полученного пройденного расстояния с расстоянием между передними и задними колесами, определенным на этапе а, для определения времени контроля, соответствующего минимальному абсолютному значению разницы между пройденным расстоянием и расстоянием между передними и задними колесами, использование этого временного интервала сбора данных в качестве целевой точки контроля относительно исходной точки отсчета;
[0080] d. расчет абсолютных координат целевой точки контроля путем получения абсолютных координат по оси x, y и z для исходной точки отсчета и суммирование их с относительным значением перемещения по оси x, y и z соответственно для целевой точки контроля, определенных на подэтапе b второго этапа для получения абсолютных координат в направлении x, y и z соответственно для целевой точки контроля;
[0081] e. изменение временного интервала сбора данных после исходной точки отсчета согласно подэтапу с на исходную точку отсчета;
[0082] f. возврат к подэтапу b и его выполнение вплоть до расчета абсолютных координат для всех целевых точек контроля;
[0083] четвертый этап построения координат и отображения, на котором на управляющем компьютере строятся абсолютные координаты для каждой целевой точки контроля, завершение визуального контроля.
Реферат
В настоящем изобретении раскрывается устройство контроля жесткой направляющей для клети. Устройство состоит из движущегося элемента, передающего элемента, приводного элемента, направляющего элемента и кожуха на основной нижней платформе. Приводной элемент состоит из датчика наклона и датчика давления, соединенных с микроконтроллером, при этом микроконтроллер соединен с приводом, привод - с бесщеточным двигателем постоянного тока. На выходном валу бесщеточного двигателя постоянного тока имеется оптический кодировщик, соединенный с приводом. Движущийся элемент состоит из приводящего выходного вала и приводимого выходного вала. Борты для крепления колес на приводящем выходном валу и приводимом выходном валу соединены с втулкой колеса, в которой установлен постоянный магнит, а с внешней стороны которой имеется резиновое покрытие. Передающий элемент состоит из червяка, который соединен с выходным валом бесщеточного двигателя постоянного тока, червячной шестерни на приводящем выходном валу, зацепляющейся с червяком, шкивов синхронизации на приводящем выходном валу и приводимом выходном валу и ремня синхронизации, огибающего шкивы синхронизации. Направляющий элемент состоит из направляющего колеса. Настоящее изобретение позволяет увеличить скорость контроля жесткой направляющей и косвенно влияет на рост производительности угольной шахты. 8 з.п. ф-лы, 11 ил.
Комментарии