Способ (варианты) и устройство для мониторинга работоспособности датчиков транспортного средства - RU2712477C2
Код документа: RU2712477C2
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к автономным транспортным средствам, а конкретнее, к мониторингу работоспособности датчиков транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Вообще, автономные транспортные средства являются транспортными средствами, которые способны распознавать окружающую обстановку, а также осуществлять навигацию по маршруту движения без ввода от человека. Автономные транспортные средства могут выявлять окружение с использованием многообразия датчиков, и данные, выдаваемые датчиками, могут использоваться системой управления автономного транспортного средства для осуществления навигации по маршруту, а также маневрирования транспортным средством надлежащим образом. Например, автономные транспортные средства зависят от датчиков для определения местоположения и выявления объектов. Однако, если какие-нибудь из датчиков работают неисправно, и один или более локальных резервных датчиков не распознают такую проблему, возможно, что автономное транспортное средство может действовать спорадически или даже катастрофически.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Согласно первому аспекту настоящего изобретения предложен способ, содержащий этапы, на которых: принимают, посредством процессора дорожной станции, первые данные с транспортного средства; принимают, посредством процессора, вторые данные с одного или более датчиков, связанных с дорожной станцией; сравнивают, посредством процессора, первые данные и вторые данные; и формируют, посредством процессора, оценку работоспособности в ответ на результат сравнения, указывающий разность между первыми данными и вторыми данными.
Согласно одному варианту осуществления упомянутого способа первые данные содержат данные, связанные с определением местоположения транспортного средства, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией, собранные одним или более датчиками, связанными с транспортным средством.
Согласно другому варианту осуществления упомянутого способа вторые данные содержат данные, связанные с определением местоположения транспортного средства, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией, собранные одним или более датчиками, связанными с дорожной станцией.
Согласно другому варианту осуществления упомянутый способ дополнительно содержит этап, на котором: передают оценку работоспособности на транспортное средство, в удаленный пункт, или то и другое.
Согласно другому варианту осуществления упомянутый способ дополнительно содержит этап, на котором: широковещательно передают вторые данные на одно или более транспортных средств.
Согласно другому варианту осуществления упомянутый способ дополнительно содержит этап, на котором: принимают отчет о работоспособности по меньшей мере от одного транспортного средства из одного или более транспортных средств в ответ на широковещательную передачу.
Согласно второму аспекту настоящего изобретения предложен способ, содержащий этапы, на которых: определяют, посредством процессора, связанного с транспортным средством, состояние в отношении одного или более датчиков, связанных с транспортным средством, одного или более алгоритмов, используемых транспортным средством, или их комбинации, с использованием первых данных, собранных одним или более датчиками, и вторых данных, связанных с дорожной станцией; и формируют, посредством процессора, отчет о работоспособности, указывающий результат определения, причем отчет о работоспособности указывает неточность или аномалию в отношении одного или более датчиков, связанных с транспортным средством, одного или более алгоритмов, используемых транспортным средством, или их комбинации.
Согласно одному варианту осуществления упомянутого способа первые данные содержат данные, связанные с определением местоположения транспортного средства, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией.
Согласно другому варианту осуществления упомянутого способа вторые данные содержат данные, связанные с определением местоположения транспортного средства, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией.
Согласно другому варианту осуществления упомянутый способ дополнительно содержит этапы, на которых: принимают первые данные от одного или более датчиков; и принимают вторые данные от дорожной станции.
Согласно третьему аспекту настоящего изобретения предложено устройство, содержащее: один или более датчиков, способных собирать данные датчиков станции; беспроводной приемопередатчик, способный устанавливать беспроводную связь с одним или более транспортными средствами; и процессор, с возможностью обмена информацией соединенный с одним или более датчиками и беспроводным приемопередатчиком, причем процессор выполнен с возможностью принимать данные датчиков станции из одного или более датчиков, процессор также выполнен с возможностью обмениваться информацией с одним или более транспортными средствами посредством беспроводного приемопередатчика, процессор дополнительно выполнен с возможностью формировать оценку работоспособности, указывающую состояние, связанное с по меньшей мере одним транспортным средством из одного или более транспортных средств.
Согласно одному варианту осуществления упомянутого устройства данные датчиков станции содержат данные, связанные с определением местоположения транспортного средства, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией, собранные одним или более датчиками.
Согласно другому варианту осуществления упомянутого устройства один или более датчиков содержат датчик с устройством оптического обнаружения и определения дальности объекта (лидар), датчик с устройством обнаружения и определения дальности объекта с помощью радиоволн (радар), инфракрасную камеру, чувствительную к видимому свету камеру, датчик контакта с дорогой, датчик барометрического давления, датчик осадков, датчик состояния грунта, датчик температуры, датчик скорости ветра, датчик направления ветра, спектрально чувствительное измерительное устройство или их комбинацию.
Согласно другому варианту осуществления упомянутого устройства беспроводной приемопередатчик выполнен с возможностью устанавливать беспроводную связь с одним или более транспортными средствами с помощью технологии связи между транспортным средством и всем остальным (V2X).
Согласно другому варианту осуществления упомянутого устройства процессор дополнительно выполнен с возможностью передавать оценку работоспособности через беспроводной приемопередатчик на по меньшей мере одно транспортное средство, в удаленный пункт, или то и другое.
Согласно другому варианту осуществления упомянутого устройства процессор выполнен с возможностью работать в интерактивном режиме в отношении одного или более транспортных средств, выполняя операции, содержащие: прием данных датчиков транспортного средства от по меньшей мере одного транспортного средства из одного или более транспортных средств; сравнение данных датчиков транспортного средства и данных датчиков станции; формирование оценки работоспособности в ответ на результат сравнения, указывающий разность между данными датчиков транспортного средства и данными датчиков станции; и передачу, через беспроводной приемопередатчик, оценки работоспособности на по меньшей мере одно транспортное средство, в удаленный пункт, или то и другое.
Согласно другому варианту осуществления упомянутого устройства данные датчиков транспортного средства содержат данные, связанные с определением местоположения транспортного средства, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией, собранные одним или более датчиками, связанными с по меньшей мере одним транспортным средством.
Согласно другому варианту осуществления упомянутого устройства процессор выполнен с возможностью работать в широковещательном режиме в отношении одного или более транспортных средств, выполняя операции, содержащие: широковещательную передачу данных датчиков станции на одно или более транспортных средств.
Согласно другому варианту осуществления упомянутого устройства процессор выполнен с возможностью работать в гибридном режиме в отношении одного или более транспортных средств, выполняя операции, содержащие: широковещательную передачу данных датчиков станции на одно или более транспортных средств; и прием отчета о работоспособности от по меньшей мере одного транспортного средства из одного или более транспортных средств в ответ на широковещательную передачу, причем отчет о работоспособности указывает неточность или аномалию в отношении одного или более датчиков, связанных с по меньшей мере одним транспортным средством, одного или более алгоритмов, реализуемых по меньшей мере одним транспортным средством, или их комбинации.
Согласно другому варианту осуществления упомянутого устройства при широковещательной передаче данных датчиков станции на одно или более транспортных средств, процессор выполнен с возможностью широковещательно передавать данные датчиков станции на одно или более транспортных средств с запросом, который инициирует, чтобы по меньшей мере одно транспортное средство выдавало отчет о работоспособности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Неограничивающие и неисчерпывающие варианты осуществления настоящего изобретения описаны со ссылкой на нижеследующие фигуры, на которых одинаковые номера ссылок указывают на идентичные части на всем протяжении различных фигур, если не указан иной способ действий.
Фиг. 1 - схема, изображающая примерный сценарий, в котором могут использоваться варианты осуществления в соответствии с настоящим изобретением.
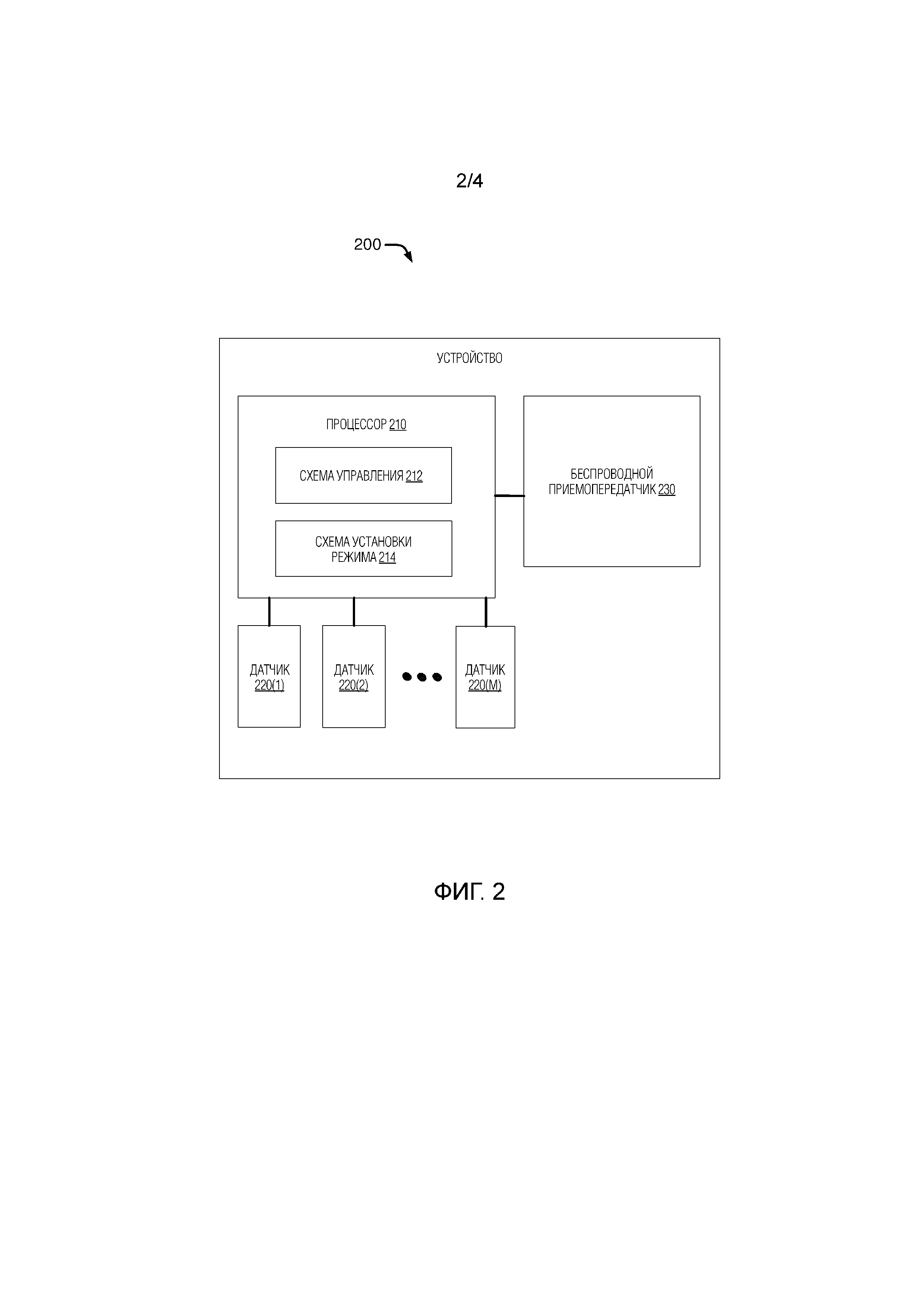
Фиг. 2 - структурная схема, изображающая примерное устройство в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 3 - блок-схема последовательности операций способа, изображающая примерную последовательность операций в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 4 - блок-схема последовательности операций способа, изображающая примерную последовательность операций в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
В нижеследующем описании сделана ссылка на прилагаемые чертежи, которые формируют его часть, и на которых ради иллюстрации показаны конкретные примерные варианты осуществления, в которых изобретение может быть осуществлено на практике. Эти варианты осуществления описаны достаточно подробно, чтобы давать специалистам в данной области техники возможность осуществить на практике концепции, раскрытые в материалах настоящей заявки, и должно быть понятно, что могут быть произведены изменения в отношении различных раскрытых вариантов осуществления, и другие варианты осуществления могут использоваться, не выходя из объема настоящего изобретения. Нижеследующее подробное описание, поэтому, не должно пониматься в ограничительном смысле.
Фиг. 1 иллюстрирует примерный сценарий 100, в котором могут использоваться варианты осуществления в соответствии с настоящим изобретением. Чтобы избегать или иным образом сглаживать вышеупомянутую проблему с неисправной работой датчиков, настоящее изобретение предлагает технологии, схемы, последовательности операций и устройство, относящиеся к мониторингу работоспособности датчиков транспортного средства. В предложенной схеме, как показано в сценарии 100, дорожная станция 110 может быть предусмотрена возле или вдоль дороги 120, чтобы поддерживать связь с некоторым количеством автономных транспортных средств 130(1)-130(N) (например, с помощью протокола связи между транспортным средством и всем остальным (V2X)). Дорожная станция 110 может быть оборудована процессором 115, который управляет по меньшей мере операциями дорожной станции 110, что касается вариантов осуществления в соответствии с настоящим изобретением. Дорожная станция 110 также может быть оборудована одним или более сканирующих датчиков 112(1)-112(P) (в дальнейшем взаимозаменяемо указываемых ссылкой как «сканирующий датчик(и)») и/или датчиков 114(1)-114(Q), встроенных в дорогу (в дальнейшем взаимозаменяемо указываемых ссылкой как «встроенный датчик(и)»). Сканирующий датчик(и) 112(1)-112(P) и/или встроенный датчик(и) 114(1)-114(Q) могут выдавать подтверждение экспериментальными данными, определяющее местоположение автономных транспортных средств 130(1)-130(N), едущих по дороге 120. Каждый из параметров N, P и Q является положительным целым числом, большим или равным 1. Дорожная станция 110 дополнительно может быть оборудована беспроводным приемопередатчиком 118, способным устанавливать беспроводную связь с автономными транспортными средствами 130(1)-130(N). Примечательно, что на фиг. 1 дорожная станция 110 и автономные транспортные средства 130(1)-130(N) начерчены не в масштабе.
В некоторых вариантах осуществления, сканирующий датчик(и) 112(1)-112(P) и встроенный датчик(и) 114(1)-114(Q) могут быть способны распознавать или иным образом выявлять данные, связанные с определением местоположения транспортных средств, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией. Соответственно, каждый из сканирующего датчика(ов) 112(1)-112(P) и встроенного датчика(ов) 114(1)-114(Q) может выдавать соответственные данные датчиков (в дальнейшем совместно указываемые ссылкой как «данные датчиков станции»), связанные с результатом определения местоположения транспортных средств, мониторинга погоды, мониторинга осадков, выявления аномалий, выявления недоброжелательных намерений или их комбинации. Данные датчиков станции также могут включать в себя данные классификации объектов касательно классификации движущихся и неподвижных объектов на или возле дороги, например, таких как и без ограничения, транспортные средства, мотоциклы, велосипеды, пешеходы, препятствия и инфраструктура.
Что касается определения местоположения транспортных средств, сканирующий датчик(и) 112(1)-112(P) и/или встроенный датчик(и) 114(1)-114(Q), например и без ограничения, могут включать в себя один или более детекторов с устройством оптического обнаружения и определения дальности объекта (лазерным локатором, лидаром), один или более детекторов с устройством обнаружения и определения дальности объекта с помощью радиоволн (радиолокатором, радаром), одну или более инфракрасных камер, одну или более чувствительных к видимому свету камер и/или один или более датчиков контакта с дорогой. Что касается мониторинга погоды и осадков, сканирующий датчик(и) 112(1)-112(P) и/или встроенный датчик(и) 114(1)-114(Q), например, и без ограничения, могут включать в себя один или более датчиков барометрического давления, один или более датчиков осадков, один или более датчиков состояния грунта, один или более датчиков температуры, один или более датчиков скорости ветра и/или один или более датчиков направления ветра. Что касается выявления аномалий и недоброжелательных намерений, сканирующий датчик(и) 112(1)-112(P) и/или встроенный датчик(и) 114(1)-114(Q), например, и без ограничений, могут включать в себя одну или более спектрально чувствительных измерительных систем, которые могут работать на частотах автомобильных радиолокаторов (например, 76 ~ 81 ГГц).
Со ссылкой на определение местоположения транспортных средств, данные датчиков станции из сканирующего датчика(ов) 112(1)-112(P) и/или встроенного датчика(ов) 114(1)-114(Q) могут собираться, накапливаться, рассчитываться или вычисляться иным образом дорожной станцией 110, чтобы определять габариты, положение и/или скорость каждого из одного или более транспортных средств 130(1)-130(N). Данные датчиков также могут использоваться дорожной станцией 110 для выявления животных, пешеходов и обломков, и могут собираться для целей, включающих в себя статистику движения транспорта. Например, один или более детекторов с лазерным локатором могут использоваться для обеспечения надежной основы для определения габаритов и положения транспортного средства. В качестве еще одного примера, один или более детекторов с радиолокатором могут использоваться для подтверждения положения транспортного средства, которое определено детектором с лазерным локатором, а также могут использоваться для определения скорости транспортного средства (например, по доплеровскому сдвигу входящих/отраженных радиолокационных сигналов). В качестве еще одного примера, одна или более инфракрасных камер могут использоваться для выявления тепловых сигнатур двигателя, тормозов и/или шин транспортного средства, чтобы выдавать возможно лучшие данные для определения местоположения классификации транспортного средства в плохих погодных условиях или в темноте по сравнению с чувствительной к видимому свету камерой. Инфракрасная камера(ы) также может выявлять аномалии, например, такие как олень или пешеход на или возле дороги 120, которые может быть трудно увидеть с точки расположения камеры транспортного средства. В качестве еще одного примера, одна или более чувствительных к видимому свету камер могут использоваться для предоставления изображений, которые должны анализироваться дорожной станцией 110, чтобы дополнительно классифицировать транспортное средство, которое может выявляться какими-нибудь из других типов датчиков. В качестве дополнительного примера, один или более датчиков контакта с дорогой могут использоваться после того, как выполнены вычисления над данными с датчиков из другого типа(ов) датчика(ов), чтобы выдавать окончательную информацию подтверждения экспериментальными данными или контрольные данные. Когда предсказание положения транспортного средства хорошо коррелирует с данными с датчиков контакта с дорогой, предсказание может считаться точным. Однако, когда предсказание не вполне коррелирует с данными с датчиков контакта с дорогой, повторный расчет предсказания может выполняться с использованием новой информации подтверждения экспериментальными данными в качестве начальной точки.
Что касается мониторинга погоды и осадков, данные датчиков станции из сканирующего датчика(ов) 112(1)-112(P) и/или встроенного датчика(ов) 114(1)-114(Q) могут собираться, накапливаться, рассчитываться или вычисляться иным образом дорожной станцией 110, чтобы определять или иным образом предсказывать состояние местной погоды и/или осадков. Например, один или более датчиков барометрического давления могут использоваться для определения или предсказания местной погоды иным образом (например, вместе с информацией, извлеченной из одного или более интерактивных источников по сети Интернет). В качестве еще одного примера, один или более датчиков осадков могут использоваться для определения состояния осадков (например, безоблачного, дождя, мокрого снега, снега, тумана, и тому подобного). Такая информация может сообщаться вовне дорожной станцией 110 (например, посредством широковещательной передачи) на автономные транспортные средства 130(1)-130(N), так чтобы такие автономные транспортные средства 130(1)-130(N) могли проверять функционирование своего соответственного датчика(ов) осадков и определять, может ли быть, что нужно использовать дополнительный датчик(и). Более того, при интенсивных осадках, детекторы с лазерным локатором могут не работать как следует вследствие пониженной видимости. В качестве еще одного примера, один или более датчиков состояния грунта могут быть встроены в дорогу 120, чтобы определять, является ли дорога 120 покрытой льдом, влажной, заснеженной, холодной, сухой или находится ли в любом другом состоянии. В качестве еще одного примера, один или более датчиков температуры могут использоваться вместе с датчиком(ами) осадков, чтобы определять, могут ли текущие погодные условия привести к снегу или дождю со снегом. Дорожная станция 110 может сообщать такую информацию на одно или более автономных транспортных средств 130(1)-130(N) с противобуксовочными возможностями, чтобы удостоверяться или иным образом напоминать, что такое транспортное средство(а) должно находиться в надлежащем противобуксовочном режиме. В качестве дополнительного примера, один или более датчиков скорости ветра и/или направления ветра могут использоваться для мониторинга скоростей резкого ветра, которые могут требовать рулевого управления с коррекцией и/или повышенной или пониженной мощности транспортного средства. Дорожная станция 110 может сообщать такую информацию на автономные транспортные средства 130(1)-130(N), чтобы гарантировать, что автономные транспортные средства 130(1)-130(N) имеют представление, что может быть необходимо определенное количество корректирующих мер. Иначе, без такой информации, может быть возможно, что по меньшей мере одно из автономных транспортных средств 130(1)-130(N) может определять, что что-то неисправно, самостоятельно.
Что касается выявления аномалий и выявления недоброжелательных намерений, данные датчиков станции из сканирующего датчика(ов) 112(1)-112(P) и/или встроенного датчика(ов) 114(1)-114(Q) могут собираться, накапливаться, рассчитываться или вычисляться иным образом дорожной станцией 110, чтобы выявлять или иным образом определять аномалии и/или недоброжелательные намерения или действия. Например, одна или более спектрально чувствительных измерительных систем могут использоваться для мониторинга радиочастотного спектра на радиолокационных частотах, тем самым, контролируя аномалии, такие как вредоносная генерация шума. Чрезмерная генерация радиочастотного (РЧ, RF) шума на радиолокационных частотах может делать датчики с радиолокатором бесполезными, поскольку датчики с радиолокатором не были бы способны считывать какие бы то ни было данные выше результирующего нижнего порога шумов. По выявлению таких аномалий и/или недоброжелательных намерений/действий, дорожная станция 110 может сообщать в надлежащие правительственные учреждения.
Каждое из автономных транспортных средств 130(1)-130(N) может быть оборудовано, обустроено или иным образом связано с процессором и одним или более датчиков. В иллюстративных целях и без ограничения, показано, что автономное транспортное средство 130(1) должно иметь процессор 135 и один или более датчиков 132(1)-132(R). Чтобы избегать становления фигуры неясной и ради простоты, процессоры и датчики не показаны на остальных из автономных транспортных средств 130(1)-130(N). Один или более датчиков на каждом из автономных транспортных средств 130(1)-130(N) может быть выполнен с возможностью распознавать или иным образом выявлять данные, связанные с определением местоположения транспортных средств, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией. Соответственно, каждый из одного или более датчиков каждого из автономных транспортных средств 130(1)-130(N) может выдавать соответственные данные датчиков (в дальнейшем совместно указываемые ссылкой как «данные датчиков транспортного средства»), связанные с результатом определения местоположения транспортных средств, мониторинга погоды, мониторинга осадков, выявления аномалий, выявления недоброжелательных намерений или их комбинации.
Что касается определения местоположения транспортных средств, датчик(и) на каждом из автономных транспортных средств 130(1)-130(N), например и без ограничения, могут включать в себя один или более датчиков глобальной системы определения местоположения (GPS), один или более инерциальных измерительных блоков (IMU), один или более детекторов с лазерным локатором, один или более детекторов с радиолокатором, одну или более инфракрасных камер, одну или более чувствительных к видимому свету камер и/или один или более ультразвуковых датчиков. Данные датчиков транспортного средства из такого датчика(ов) могут использоваться для функций, таких как глобальное определение местоположения, определение местонахождения, выявление объектов и классификация объектов. Например, данные датчиков из датчика(ов) GPS, IMU, детектора(ов) с лазерным локатором и камер(ы) могут использоваться для определения местонахождения. Более того, данные датчиков из детектора(ов) с лазерным локатором, детектора(ов) с радиолокатором, камер(ы) и ультразвукового датчика(ов) могут использоваться для выявления объектов и классификации объектов. Что касается мониторинга погоды и осадков, датчик(и) на каждом из автономных транспортных средств 130(1)-130(N), например, и без ограничения, может включать в себя один или более датчиков осадков и/или один или более датчиков температуры. Что касается выявления аномалий и недоброжелательных намерений, датчик(и) на каждом из автономных транспортных средств 130(1)-130(N), например, и без ограничений, может включать в себя один или более датчиков силовой передачи (например, датчик(и) скорости вращения колес для мониторинга силы сцепления и скорости вращения колес). Данные датчиков из датчика(ов) осадков, датчика(ов) температуры и датчика(ов) скорости вращения колес могут использоваться для определения погодных и дорожных условий.
Дорожная станция 110 может действовать в некотором количестве режимов, а именно: широковещательном режиме, интерактивном режиме и гибридном режиме. В широковещательном режиме, дорожная станция 110 может широковещательно передавать данные датчиков станции, собранные сканирующим датчиком(ами) 112(1)-112(P) и/или встроенным датчиком(ами) 114(1)-114(Q), связанными с дорожной станцией 110, на находящиеся поблизости автономные транспортные средства, такие как автономные транспортные средства 130(1)-130(N), едущие по дороге 120. Каждое из автономных транспортных средств 130(1)-130(N), по приему данных с датчиков станции, широковещательно переданных дорожной станцией 110, могут выполнять одну или более проверок корректности с использованием данных с датчиков станции. Например, автономное транспортное средство может использовать данные датчиков станции для определения, есть ли неточность или аномалия, в отношении одного или более локальных датчиков, связанных с автономным транспортным средством. Дополнительно, автономное транспортное средство может использовать данные датчиков станции для определения, есть ли неточность или аномалия, в отношении одного или более алгоритмов и/или программно реализованных программ, используемых, выполняемых на или иным реализуемых в автономном транспортном средстве. Это предоставляет автономному транспортному средству возможность определять работоспособность (например, в показателях точности) в отношении каждого из своих датчиков.
В интерактивном режиме, дорожная станция 110 может принимать данные датчиков транспортного средства из одного или более автономных транспортных средств 130(1)-130(N), едущих по дороге 120, и может определять корреляцию или иным образом сравнивать принятые данные датчиков транспортного средства с информацией подтверждения экспериментальными данными, представленной данными с датчиков станции, собранных сканирующим датчиком(ами) 112(1)-112(P) и/или встроенным датчиком(ами) 114(1)-114(Q), которые связаны с дорожной станцией 110. Дорожная станция 110 может формировать и передавать оценку работоспособности на каждое из одного или более автономных транспортных средств 130(1)-130(N), с которых соответственные данные датчиков транспортного средства были приняты и сравнивались с информацией подтверждения экспериментальными данными. Оценка работоспособности может указывать общее состояние работоспособности в отношении одного или более датчиков, одного или более алгоритмов и/или одной или более программно реализованных программ, установленных на, используемых или иным образом реализованных в автономном транспортном средстве. Высокая оценка может указывать надлежащее функционирование и/или отсутствие проблем с точностью одного или более датчиков, одного или более алгоритмов и/или одной или более программно реализованных программ. Наоборот, низкая оценка может указывать ненадлежащее функционирование и/или неточность одного или более датчиков, одного или более алгоритмов и/или одной или более программно реализованных программ. Дополнительно или в качестве альтернативы, дорожная станция 110 может пускать в обращение результаты сравнения через сеть 150 в один или более удаленных пунктов (показанных в качестве удаленной станции 140 на фиг. 1), например, и без ограничения, таких как один или более автомобильных центров технического обслуживания, одна или более автомобильных торговых сетей и/или один или более производителей транспортных средств. В некоторых вариантах осуществления, интерактивный режим может использоваться распорядительными службами и/или правительственными учреждениями, которые требуют точной информации о работоспособности датчиков транспортных средств и точности классификации объектов.
В гибридном режиме, дорожная станция 110 может функционировать как в широковещательном режиме, а также требовать, чтобы каждое из одного или более автономных транспортных средств 130(1)-130(N), принимающих широковещательную передачу, возвращали соответственный отчет о работоспособности. Хотя гибридный режим может быть менее устойчивым к возможно неточным отчетам о работоспособности транспортных средств (например, вследствие взлома или неисправно работающего программного обеспечения), гибридный режим дает дорожной станции 110 возможность обмениваться информацией с удаленным пунктом 140 (например, автомобильным центром технического обслуживания, автомобильной торговой сетью или производителем транспортных средств) касательно необходимости технического обслуживания или ремонта для одного или более датчиков данного автономного транспортного средства.
Фиг. 2 иллюстрирует примерное устройство 200 в соответствии с вариантом осуществления настоящего изобретения. Устройство 200 может выполнять различные функции, связанные с технологиями, схемами, способами и системами, описанными в материалах настоящей заявки, относящимися к мониторингу работоспособности датчиков транспортного средства, в том числе, описанные выше в отношении сценария 100, а также описанные ниже в отношении последовательности 300 операций и последовательности 400 операций. Устройство 200 может быть реализовано в виде или в дорожной станции 110 в сценарии 100 и транспортном средстве 100, чтобы осуществлять различные варианты осуществления в соответствии с настоящим изобретением. Таким образом, в некоторых вариантах осуществления, устройство 200 может быть примерной реализацией дорожной станции 110. Устройство 200 может включать в себя один, некоторые или все из компонентов, показанных на фиг. 2. Устройство 200 также может включать в себя один или более других компонентов, не относящихся к различным вариантам осуществления настоящего изобретения, и, таким образом, такой компонент(ы) не показан на фиг. 2, а его описание не приведено в материалах настоящей заявки ради краткости.
Устройство 200 может включать в себя по меньшей мере процессор 210, который может включать в себя схему 212 управления и схему 214 установления режима. Процессор 210 может быть реализован в виде одного или более одноядерных процессоров, одного или более многоядерных процессоров, или одного или более процессоров CISC. Таким образом, даже если термин «процессор» в единственном числе используется в материалах настоящей заявки, чтобы указывать ссылкой на процессор 210, процессор 210 может включать в себя многочисленные процессоры в некоторых вариантах осуществления и одиночный процессор в других вариантах осуществления в соответствии с настоящим изобретением. В еще одном аспекте, процессор 210 может быть реализован в виде аппаратных средств (и, по выбору, встроенных программ) с электронными компонентами, например, и без ограничения, включающими в себя один или более транзисторов, один или более диодов, один или более конденсаторов, один или более резисторов и/или одну или более катушек индуктивности, которые выполнены с возможностью или скомпонованы, чтобы добиваться конкретных целей в соответствии с настоящим изобретением. Другими словами, в по меньшей мере некоторых вариантах осуществления, процессор 210 является машиной специального назначения, специально сконструированной, скомпонованной и выполненной с возможностью выполнять конкретные задачи, в том числе мониторинг работоспособности датчиков транспортного средства, в соответствии с различными вариантами осуществления настоящего изобретения. Процессор 210 может быть примерной реализацией процессора 115 дорожной станции 110.
Устройство 200 также может включать в себя один или более датчиков 220(1)-220(M), способных собирать данные датчиков станции, описанные выше в отношении дорожной станции 110. Один или более датчиков 220(1)-220(M) могут быть примерными реализациями сканирующего датчика(ов) 112(1)-112(P) и/или встроенного датчика(ов) 114(1)-114(Q), описанных выше. В некоторых вариантах осуществления, один или более датчиков 220(1)-220(M) могут включать в себя детектор с лазерным локатором, детектор с радиолокатором, инфракрасную камеру, чувствительную к видимому свету камеру, датчик контакта с дорогой, датчик барометрического давления, датчик осадков, датчик состояния грунта, датчик температуры, датчик скорости ветра, датчик направления ветра, спектрально чувствительное измерительное устройство или их комбинацию. В некоторых вариантах осуществления, данные датчиков станции могут включать в себя данные, связанные с определением местоположения транспортного средства, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией. Соответственно, возможности, признаки и описание сканирующего датчика(ов) 112(1)-112(P) и встроенного датчика(ов) 114(1)-114(Q) применимы к одному или более датчиков 220(1)-220(M), и, таким образом, не будут повторяться, чтобы избежать избыточности.
Устройство 200 дополнительно может включать в себя беспроводной приемопередатчик 230, способный устанавливать беспроводную связь с одним или более транспортных средств, например, таких как автономные транспортные средства 130(1)-130(N). В некоторых вариантах осуществления, беспроводной приемопередатчик 230 может быть выполнен с возможностью устанавливать беспроводную связь с одним или более транспортных средств с помощью технологии связи между транспортным средством и всем остальным (V2X) или любой применимой технологии беспроводной связи.
Процессор 210 может быть с возможностью связи присоединен к одному или более датчиков 220(1)-220(M) и беспроводному приемопередатчику 230. Схема 212 управления может быть способна принимать данные датчиков станции из одного или более датчиков 220(1)-220(M). Схема 212 управления также может быть способна поддерживать связь с одним или более транспортных средств через беспроводной приемопередатчик 230. Схема 212 управления дополнительно может быть способна формировать оценку работоспособности или отчет о работоспособности, указывающие состояние, связанное с по меньшей мере одним транспортным средством из одного или более транспортных средств.
В некоторых вариантах осуществления, схема 212 управления может быть способна передавать оценку работоспособности через беспроводной приемопередатчик 230 на по меньшей мере одно транспортное средство, в удаленный пункт (например, удаленный пункт 140) или то и другое.
В некоторых вариантах осуществления, схема 212 управления может быть способна работать в интерактивном режиме в отношении одного или более транспортных средств, выполняя некоторое количество операций. Например, схема 212 управления может быть способна принимать данные датчиков транспортного средства с по меньшей мере одного транспортного средства из одного или более транспортных средств через беспроводной приемопередатчик 230. Дополнительно, схема 212 управления может быть способна сравнивать данные датчиков транспортного средства и данные датчиков станции. Более того, схема 212 управления может быть способна формировать оценку работоспособности в ответ на результат сравнения, указывающий разность между данными с датчиков транспортного средства и данными с датчиков станции. Более того, схема 212 управления может быть способна передавать, через беспроводной приемопередатчик 230, оценку работоспособности на по меньшей мере одно транспортное средство, в удаленный пункт (например, удаленный пункт 140) или то и другое. В некоторых вариантах осуществления, данные датчиков транспортного средства могут включать в себя данные, связанные с определением местоположения транспортного средства, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией, собранные одним или более датчиков, связанных с по меньшей мере одним транспортным средством.
В некоторых вариантах осуществления, схема 212 управления может быть способна работать в широковещательном режиме в отношении одного или более транспортных средств, широковещательно передавая, через беспроводной приемопередатчик 230, данные датчиков станции на одно или более транспортных средств.
В некоторых вариантах осуществления, схема 212 управления может быть способна работать в гибридном режиме в отношении одного или более транспортных средств, выполняя некоторое количество операций. Например, схема 212 управления может быть способна широковещательно передавать, через беспроводной приемопередатчик 230, данные датчиков станции на одно или более транспортных средств. Более того, схема 212 управления может быть способна принимать, через беспроводной приемопередатчик 230, отчет о работоспособности с по меньшей мере одного транспортного средства из одного или более транспортных средств в ответ на широковещательную передачу. Отчет о работоспособности может указывать неточность или аномалию в отношении одного или более датчиков, связанных с по меньшей мере одним транспортным средством, одного или более алгоритмов, реализованных по меньшей мере одним транспортным средством, или их комбинации.
В некоторых вариантах осуществления, при широковещательной передаче данных с датчиков станции на одно или более транспортных средств, схема 212 управления может быть способна широковещательно передавать, через беспроводной приемопередатчик 230, данные датчиков станции на одно или более других транспортных средств с запросом, который инициирует, чтобы по меньшей мере одно транспортное средство выдавало отчет о работоспособности.
Схема 214 установки режима может быть способна выбирать режим работы из некоторого количества режимов, в котором может работать процессор 210. В некоторых вариантах осуществления, количество режимов, имеющихся в распоряжении для выбора схемой 214 установки режима, может включать в себя широковещательный режим, интерактивный режим и гибридный режим, как описано выше в отношении сценария 100. Соответственно, подробное описание каждого из широковещательного режима, интерактивного режима и гибридного режима не повторяется, чтобы избежать избыточности. В некоторых вариантах осуществления, схема 214 установки режима может принимать, через беспроводной приемопередатчик 230, команду пользователя, которая дает схеме 214 установки режима указание выбрать один из режимов, чтобы процессор 210 работал в выбранном режиме.
Фиг. 3 иллюстрирует примерную последовательность 300 операций в соответствии с вариантом осуществления настоящего изобретения. Последовательность 300 операций может включать в себя одну или более операций, действий или функций, показанных в виде вершин блок-схемы, таких как 310, 320, 330, 340, 350, 360 и 370. Хотя проиллюстрированы в виде дискретных вершин блок-схемы, различные вершины блок-схемы последовательности 300 операций могут быть разделены на дополнительные вершины блок-схемы, скомбинированы в меньшее количество вершин блок-схемы или аннулированы, в зависимости от желательной реализации. Последовательность 300 операций может быть реализована по сценарию 100 и/или устройством 200. В иллюстративных целях и без ограничения, нижеследующее описание последовательности 300 операций приведено в контексте дорожной станции 110 в сценарии 100. Последовательность 300 операций может начинаться вершиной 310 блок-схемы.
На 310, последовательность 300 операций может включать в себя прием процессором 115 дорожной станции 110 первых данных (например, данных с датчиков транспортного средства) из транспортного средства (например, автономного транспортного средства 130(1)). Последовательность 300 операций может переходить с 310 на 320.
На 320, последовательность 300 операций может включать в себя прием процессором 115 вторых данных (например, данных с датчиков станции) из одного или более датчиков (например, сканирующего датчика(ов) 112(1)-112(P) и/или встроенного датчика(ов) 114(1)-114(Q)), связанных с дорожной станцией 110. Последовательность 300 операций может переходить с 320 на 330.
На 330, последовательность 300 операций может включать в себя сравнение процессором 115 первых данных и вторых данных. Последовательность 30 операций может переходить с 330 на 340.
На 340, последовательность 300 операций может включать в себя формирование процессором 115 оценки работоспособности в ответ на результат сравнения, указывающий разность между первыми данными и вторыми данными. Последовательность 300 операций может переходить с 340 на 350 или 360.
На 350, последовательность 300 операций может включать в себя передачу процессором 115 оценки работоспособности на транспортное средство, в удаленный пункт (например, удаленный пункт 140) или то и другое в ответ на результат сравнения, указывающий разность между первыми данными и вторыми данными.
На 360, последовательность 300 операций может включать в себя широковещательную передачу процессором 115 вторых данных на одно или более транспортных средств. Последовательность 300 операций может переходить с 360 на 370.
На 370, последовательность 300 операций может включать в себя прием процессором 115 отчета о работоспособности с по меньшей мере одного транспортного средства из одного или более транспортных средств в ответ на широковещательную передачу.
В некоторых вариантах осуществления, первые данные могут включать в себя данные, связанные с определением местоположения транспортного средства, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией, собранные одним или более датчиков, связанных с транспортным средством.
В некоторых вариантах осуществления, вторые данные могут включать в себя данные, связанные с определением местоположения транспортного средства, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией, собранные одним или более датчиков, связанных с дорожной станцией.
Фиг. 4 иллюстрирует примерную последовательность 400 операций в соответствии с вариантом осуществления настоящего изобретения. Последовательность 400 операций может включать в себя одну или более операций, действий или функций, показанных в виде вершин блок-схемы, таких как 410, 420, 430 и 440. Хотя проиллюстрированы в виде дискретных вершин блок-схемы, различные вершины блок-схемы последовательности 400 операций могут быть разделены на дополнительные вершины блок-схемы, скомбинированы в меньшее количество вершин блок-схемы или аннулированы, в зависимости от желательной реализации. Последовательность 400 операций может быть реализована в сценарии 100 и/или автономными транспортными средствами 130(1)-130(N). В иллюстративных целях и без ограничения, нижеследующее описание последовательности 400 операций приведено в контексте транспортного средства 130(1) в сценарии 100. Последовательность 400 операций может начинаться вершиной 410 блок-схемы.
На 410, последовательность 400 операций может включать в себя прием процессором 135 транспортного средства 130(1) первых данных (например, данных с датчиков транспортного средства) из одного или более датчиков (например, одного или более датчиков 132(1)-132(R)), связанных с транспортным средством 130(1). Последовательность 400 операций может переходить с 410 на 420.
На 420, последовательность 400 операций может включать в себя прием процессором 135 вторых данных (например, данных с датчиков станции) из дорожной станции (например, дорожной станции 110). Последовательность 400 операций может переходить с 420 на 430.
На 430, последовательность 400 операций может включать в себя определение процессором 135 транспортного средства 130(1) состояния в отношении одного или более датчиков (например, одного или более датчиков 132(1)-132(R)), связанных с транспортным средством 130(1), одного или более алгоритмов, используемых транспортным средством 130(1), или их комбинации, использование первых данных (например, данных с датчиков транспортного средства), собранных одним или более датчиков, и вторых данных (например, данных с датчиков станции), связанных с дорожной станцией (например, дорожной станцией 110). Последовательность 400 операций может переходить с 430 на 440.
На 440, последовательность 400 операций может включать в себя формирование процессором 135 отчета о работоспособности, указывающего результат определения. Отчет о работоспособности может указывать неточность или аномалию в отношении одного или более датчиков, связанных с транспортным средством 130(1), одного или более алгоритмов, используемых транспортным средством 130(1), или их комбинации.
В некоторых вариантах осуществления, первые данные могут включать в себя данные, связанные с определением местоположения транспортного средства, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией.
В некоторых вариантах осуществления, вторые данные могут включать в себя данные, связанные с определением местоположения транспортного средства, мониторингом погоды, мониторингом осадков, выявлением аномалий, выявлением недоброжелательных намерений или их комбинацией.
В вышеприведенном изобретении была сделана ссылка на прилагаемые чертежи, которые формируют его часть, и на которых, в качестве иллюстрации, показаны конкретные реализации, в которых настоящее изобретение может быть осуществлено на практике. Понятно, что могут использоваться другие реализации, и структурные изменения могут быть произведены, не выходя из объема настоящего изобретения. Ссылки в описании изобретения на «один из вариантов осуществления», «вариант осуществления», «примерный вариант осуществления», и т. д., указывают, что описанный вариант осуществления может включать в себя конкретные признак, конструкцию или характеристику, но каждый вариант осуществления не обязательно может включать в себя конкретные признак, конструкцию или характеристику. Более того, такие фразы не обязательно являются указывающими ссылкой на один и тот же вариант осуществления. Кроме того, когда конкретный признак, конструкция или характеристика описаны в связи с вариантом осуществления, предполагается, что он находится в пределах познаний специалиста в данной области техники для осуществления такого признака, конструкции или характеристики в связи с другими вариантами осуществления, описанными или не описанными в прямой форме.
Реализации систем, приспособлений, устройств и способов, раскрытых в материалах настоящей заявки, могут содержать или использовать компьютер специального назначения или общего применения, включающий в себя компьютерные аппаратные средства, например, такие как один или более процессоров и системная память, как обсуждено в материалах настоящей заявки. Реализации в пределах объема настоящего изобретения также могут включать в себя физические и другие компьютерно-читаемые носители для переноса или хранения компьютерно-исполняемых команд и/или структур данных. Такие машиночитаемые носители могут быть любыми имеющимися в распоряжении носителями, к которым может осуществляться доступ компьютерной системой общего применения или специального назначения. Компьютерно-читаемые носители, которые хранят компьютерно-исполняемые команды, являются компьютерными запоминающими носителями (устройствами). Компьютерно-читаемые носители, которые переносят компьютерно-исполняемые команды, являются средой передачи данных. Таким образом, в качестве примера, а не ограничения, реализации настоящего изобретения могут содержать по меньшей мере две отчетливо разных разновидности компьютерно-читаемых носителей: компьютерные запоминающие носители (устройства) и среду передачи данных.
Компьютерные запоминающие носители (устройства) включают в себя RAM, ROM, EEPROM, CD-ROM, твердотельные накопители («SSD») (например, на основе RAM), флэш-память, память на фазовых переходах («PCM»), другие типы памяти, другое оптическое дисковое запоминающее устройство, магнитное дисковое запоминающее устройство или другие магнитные устройства хранения данных, либо любой другой носитель, который может использоваться для хранения требуемого средства управляющей программы в форме компьютерно-исполняемых команд или структур данных, и к которым может осуществляться доступ компьютером общего применения или специального назначения.
Реализация устройств, систем и способов, раскрытых в материалах настоящей заявки, может поддерживать связь через компьютерную сеть. «Сеть» определена в качестве одного или более каналов передачи данных, которые делают возможной транспортировку электронных данных между компьютерными системами и/или модулями, и/или другими электронными устройствами. Когда информация переносится или предоставляется через сеть или другое соединение связи (проводное, беспроводное, или любую комбинацию проводного или беспроводного) в компьютер, компьютер, по сути, рассматривает соединение в качестве среды передачи. Среда передачи данных может включать в себя сеть и/или каналы передачи данных, которые могут использоваться для переноса требуемого средства управляющей программы в форме компьютерно-читаемых команд или структур данных, и к которым может осуществляться доступ компьютером общего применения или специального назначения. Комбинации приведенного выше также должны быть включены в объем компьютерно-читаемых носителей.
Компьютерно-исполняемые команды, например, содержат команды и данные, которые, когда выполняются на процессоре, побуждают компьютер общего применения, компьютер специального назначения или устройство обработки специального назначения выполнять определенную функцию или группу функций. Компьютерно-исполняемые команды, например, могут быть двоичным кодом, командами промежуточного формата, такими как на языке ассемблера, или даже исходным кодом. Хотя предмет изобретения был описан на языке, специфичном структурным признакам и/или действиям обобщенных способов, должно быть понятно, что предмет изобретения, определенный в прилагаемой формуле изобретения, не обязательно ограничен описанными признаками или действиями, описанными выше. Скорее, описанные признаки и действия раскрыты в качестве примерных форм реализации формулы изобретения.
Специалисты в данной области техники будут принимать во внимание, что настоящее изобретение может быть осуществлено на практике в сетевых вычислительных средах с другими типами конфигураций компьютерных систем, включая встроенный в приборный щиток компьютер транспортного средства, персональные компьютеры, настольные компьютеры, дорожные компьютеры, процессоры сообщений, карманные устройства, многопроцессорные системы, основанную на микропроцессорах или программируемую бытовую электронику, сетевые ПК (персональные компьютеры), миникомпьютеры, универсальные компьютеры, мобильные телефоны, PDA (персональные цифровые секретари), планшеты, пейджеры, маршрутизаторы, коммутаторы, различные запоминающие устройства, и тому подобное. Изобретение также может быть осуществлено на практике в средах распределенной системы, где локальные и удаленные компьютерные системы, которые связаны (проводными каналами передачи данных, беспроводными каналами передачи данных или любой комбинацией проводных и беспроводных каналов передачи данных) через сеть, те и другие выполняют задания. В среде распределенной системы, программные модули могут быть расположены как в локальном, так и в удаленном запоминающих устройствах памяти.
Кроме того, где уместно, функции, описанные в материалах настоящей заявки, могут выполняться в одном или более из: аппаратных средств, программного обеспечения, встроенных программ, цифровых компонентов или аналоговых компонентов. Например, одна или более специализированных интегральных схем (ASIC) могут быть запрограммированы выполнять одну или более из систем и процедур, описанных в материалах настоящей заявки. Определенные термины используются на всем протяжении описания и формулы изобретения для указания ссылкой на конкретные компоненты системы. Как будет принимать во внимание специалист в данной области техники, компоненты могут указываться ссылкой разными наименованиями. Данный документ не подразумевает, что следует проводить различие между компонентами, которые отличаются по наименованию, но не по функции.
Следует отметить, что варианты осуществления датчиков, обсужденные выше, могут содержать компьютерные аппаратные средства, программное обеспечение, встроенные программы или любую их комбинацию для выполнения по меньшей мере части своих функций. Например, датчик может включать в себя машинный код, выполненный с возможностью выполняться на одном или более процессоров, и может включать в себя аппаратные логические/электрические схемы, управляемые машинным кодом. Эти примерные устройства предусмотрены в материалах настоящей заявки в целях иллюстрации и не подразумеваются ограничивающими. Варианты осуществления настоящего изобретения могут быть реализованы в дополнительных типах устройств, как было бы известно специалистам в данной области(ях) техники.
По меньшей мере некоторые варианты осуществления настоящего изобретения были направлены на компьютерные программные продукты, содержащие такую логику (например, в форме программного обеспечения), хранимую на любом используемом компьютером носителе. Такое программное обеспечение, когда выполняется в одном или более устройств обработки данных, побуждает устройства действовать, как описано в материалах настоящей заявки.
Несмотря на то, что выше были описаны варианты осуществления настоящего изобретения, должно быть понятно, что они были представлены только в качестве примера, а не ограничения. Специалистам в данной области техники будет очевидно, что различные изменения по форме и содержанию могут быть произведены в нем, не выходя из сущности и объема настоящего изобретения. Так, широту и объем настоящего изобретения не следует ограничивать никакими из вышеописанных вариантов осуществления, но следует определять только в соответствии с нижеследующей формулой изобретения и ее эквивалентами. Вышеизложенное описание было представлено в целях иллюстрации и описания. Оно не подразумевается исчерпывающим или ограничивающим настоящее изобретение точной раскрытой формой. Многие модификации и варианты возможны в свете вышеприведенной доктрины. Кроме того, следует обратить внимание, что любые или все из вышеупомянутых альтернативных реализаций могут использоваться в любой комбинации, требуемой для формирования дополнительных смешанных реализаций настоящего изобретения.
Реферат
Изобретение относится к мониторингу работоспособности датчиков транспортного средства. Способ мониторинга работоспособности датчиков транспортного средства содержит этапы, на которых принимают посредством процессора дорожной станции первые данные с транспортного средства, принимают вторые данные с одного или более датчиков, один из которых встроен в дорогу. Причем вторые данные указывают определение местоположения посредством наземного контроля транспортного средства, сравнивают первые данные и вторые данные и формируют оценку работоспособности в ответ на результат сравнения, указывающий разность между первыми данными и вторыми данными. Устройство для мониторинга работоспособности датчиков транспортного средства содержит один или более датчиков, беспроводной приемопередатчик и процессор, с возможностью обмена информацией соединенный с одним или более датчиками и беспроводным приемопередатчиком. Процессор дополнительно выполнен с возможностью формировать оценку работоспособности. Причем по меньшей мере один из одного или более датчиков встроен в дорогу и выполнен с возможностью формирования данных, указывающих определение местоположения посредством наземного контроля транспортного средства. Достигается преждевременный мониторинг работоспособности датчиков транспортного средства. 3 н. и 17 з.п ф-лы, 4 ил.
Комментарии