Измерительный преобразователь для измерения динамической характеристики вала - RU2285903C2
Код документа: RU2285903C2
Чертежи





Описание
Область изобретения
Данное изобретение относится к измерительному преобразователю, а точнее к измерительному преобразователю для измерения динамической характеристики вала, имеющего концентрические элементы, поддерживающие дугообразный датчик между ними.
Предпосылки создания изобретения
Для измерения механического напряжения существуют различные устройства. К известным из уровня техники устройствам относятся двойные лучевые сенсорные элементы, которые включают в себя размещенные с интервалом торцевые детали, соединенные неразъемно с параллельно размещенными лучевыми сенсорными элементами, а лучевые элементы относительно легко регулируются или наклонены только в одном направлении. Один из торцов обычно прикреплен к опорной конструкции, а другой конец торца входит в соприкосновение с валом в ходе работы или непосредственно прикреплен к валу.
К другим измерительным устройствам, известным из уровня техники, относятся те, которые обеспечивают консольное соединение между элементом вала и сенсорным устройством нагрузки. Консольный характер соединения способствует увеличению ширины или толщины устройства, тем самым увеличивая пространство, необходимое для расположения устройства.
Это нашло отражение в американском патенте №4899599 Эдденса (1990 год), в котором описываются сенсорное устройство механического напряжения для измерения натяжения на перемычке или ветви цепной передачи, в том числе элемента каркаса; элемент вала, начинающийся от элемента каркаса и имеющий перемычку или ветвь цепной передачи, установленной на нем, а также сенсорное устройство механического напряжения, поддерживающее одну часть вала на элементе каркаса.
Измерительные преобразователи, известные из уровня техники, не компактны, и их нельзя использовать в качестве неотъемлемой части системы шкива.
В этой связи требуется создать измерительный преобразователь, который включает в себе обладающие соосностью (концентричностью) и лежащие в одной плоскости (компланарные) элементы, поддерживающие расположенные между ними дугообразные сенсорные элементы. Необходим измерительный преобразователь, который бы помещался внутри шкива. Новый измерительный преобразователь должен содержать концентрические и компланарные элементы, поддерживающие находящийся между ними дугообразный сенсорный элемент и обладающие способностью самовыравнивания нагрузки. Данное изобретение удовлетворяет этим требованиям.
Краткое изложение изобретения
Основной аспект изобретения относится к обеспечению измерительного преобразователя, который содержит концентрические и компланарные элементы, поддерживающие расположенный между ними дугообразный сенсорный элемент.
Другим аспектом изобретения является обеспечение измерительного преобразователя, который бы помещался внутри шкива.
Другой аспект изобретения относится к обеспечению измерительного преобразователя, который содержит концентрические и компланарные элементы, поддерживающие расположенный между ними дугообразный сенсорный элемент и обладающие способностью самонастройки нагрузки.
Другие аспекты изобретения будут изложены или станут очевидными в результате следующего описания изобретения и сопровождающих его чертежей.
Изобретение содержит измерительный преобразователь для определения динамической характеристики вала. Измерительный преобразователь содержит дугообразный сенсорный элемент, поддерживаемый между внутренним элементом и наружным элементом. По меньшей мере, один тензодатчик прикреплен к поверхности дугообразного сенсорного элемента для определения поверхностной деформации, вызванной динамической характеристикой вала. Внутренний элемент, наружный элемент и дугообразный сенсорный элемент по существу являются компланарными. Внутренний элемент включает в себя средства для прикрепления измерительного преобразователя к посадочной поверхности. Внутренний элемент может также содержать самонастраивающийся элемент для оптимизации чувствительности датчика.
Краткое описание чертежей
Сопровождающие чертежи, которые включены и являются частью описания, иллюстрируют предпочтительные варианты осуществления настоящего изобретения и вместе с описанием служат для пояснения принципов изобретения.
Фиг.1 - перспективный вид измерительного преобразователя.
Фиг.2 - перспективный вид измерительного преобразователя.
Фиг.3 - вид сверху сенсорного кольца.
Фиг.4А - вид сверху измерительного преобразователя.
Фиг.4В - поперечный разрез фиг.4А по линии В-В.
Фиг.4С - вид сбоку по линии 4С-4С в фиг.4В.
Фиг.5 - перспективный объемный вид измерительного преобразователя.
Фиг.6 - частичный вид сверху самонастраивающейся части.
Фиг.7 - частичный вид сверху самонастраивающейся части.
Подробное описание предпочтительного варианта осуществления изобретения
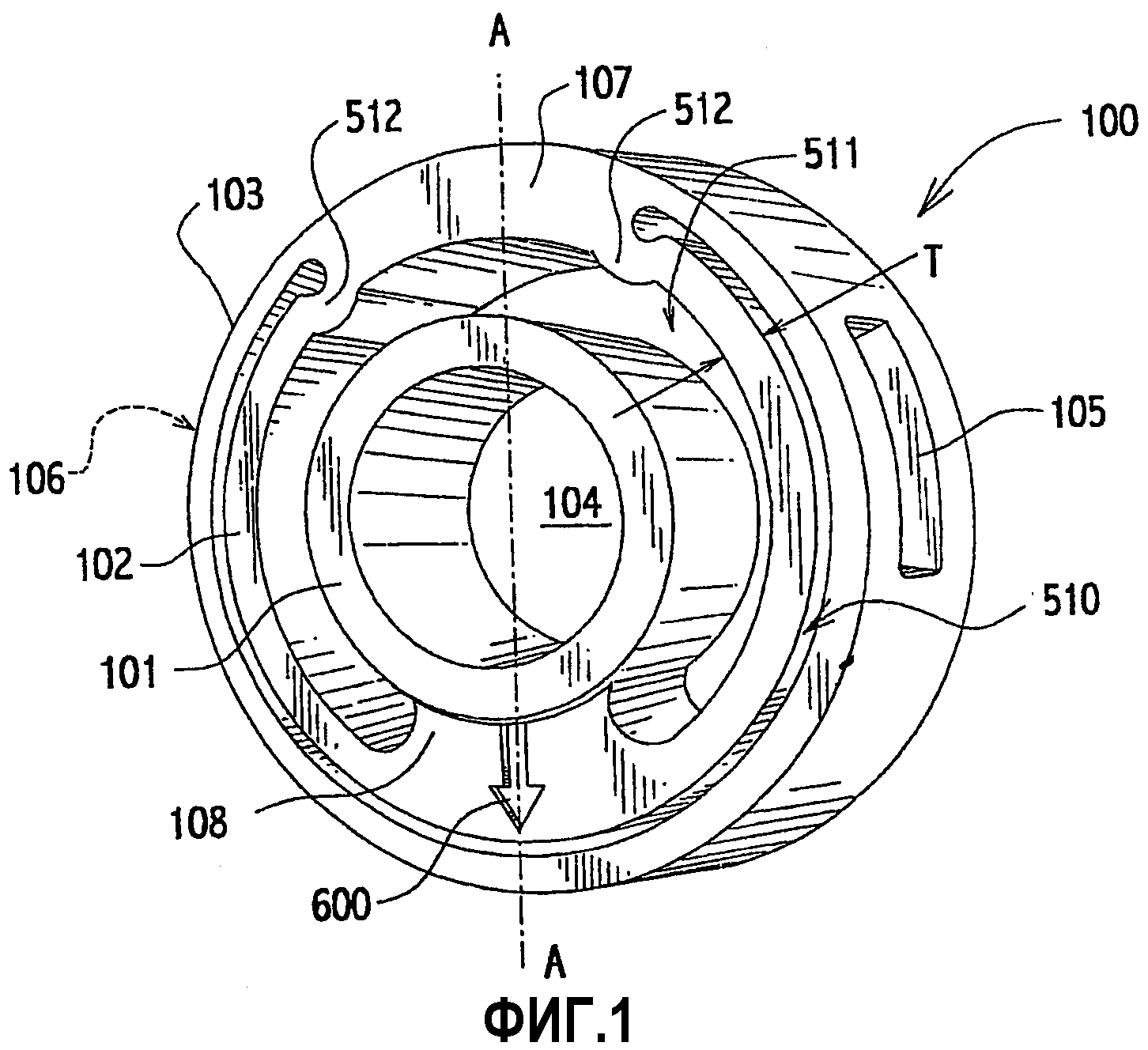
На фиг.1 изображен перспективный вид измерительного преобразователя. Измерительный преобразователь относительно компактен и может использоваться в шкиве для измерения нагрузки на вал или динамической характеристики вала. Это включает в себя измерение нагрузки на ступицу, а значит, натяжения ремня. Нагрузка на ступицу является нагрузкой, передаваемой шкиву и его валу натяжением ремня в системе ременного привода. Измерительный датчик также может использоваться для измерения вибрации вала.
Измерительный преобразователь 100 обычно содержит дугообразный внутренний элемент или кольцо ступицы 101, сенсорное кольцо 102 и дугообразный наружный элемент или наружное кольцо 103. Кольцо ступицы 101 включает отверстие 104, которое служит в качестве средства для прикрепления измерительного преобразователя к посадочной поверхности. Крепежное средство, например болт, через отверстие 104 входит в зацепление с кольцом ступицы 101 для подсоединения измерительного преобразователя к посадочной поверхности. Кольцо ступицы 101 является относительно жестким, что позволяет обеспечить надежное крепление измерительного преобразователя к посадочной поверхности. Кольцо ступицы 101 может также включать встроенную ось для прикрепления кольца ступицы к посадочной поверхности. Кольцо ступицы 101 присоединено к сенсорному кольцу 102 с помощью соединительной части или элемента 108.
Сенсорное кольцо 102 соединено между кольцом ступицы 101 и наружным кольцом 103. Сенсорное кольцо 102 имеет дугообразную форму, которая концентрически взаимодействует с дугообразной формой кольца ступицы 101 и наружного кольца 103. Концентрическая связь между кольцом ступицы, сенсорным кольцом и наружным кольцом позволяет измерительному преобразователю согласно изобретению иметь минимальный диаметр для лучшего использования в ограниченных пространствах, как, например, в шкиве.
Паз 510 расположен между сенсорным кольцом 102 и наружным кольцом 103. Паз 511 расположен между сенсорным кольцом 102 и внутренним кольцом 101. Под нагрузкой сенсорное кольцо 102 деформируется и удлиняется или принимает эллиптическую форму, имея большую ось в направлении А-А, а меньшую ось в направлении В-В, см. фиг.3. Ширина паза 511 определяется заданной общей деформацией сенсорного кольца 102 в направлении В-В. Ширина паза 511 зависит от толщины Т сенсорного кольца 102. Толщина Т определяется динамическими воздействиями, которым подвергается сенсорное кольцо.
По меньшей мере, один тензодатчик прикреплен к сенсорному кольцу, как это показано на фиг.3. Вектор силы нагрузки на ступицу представлен вектором 600. Сенсорное кольцо 102 достаточно гибкое, чтобы вызвать поверхностное напряжение, которое выявляется на месте расположения тензодатчика при приложении нагрузки ступицы на кольцо ступицы. Сенсорное кольцо 102 прикреплено с помощью дугообразных соединительных элементов 512 к наружному кольцу 103 и части 107. Часть 107 и соединительный элемент 108 расположены на по существу противоположных концах сенсорного кольца 102. Присоединение сенсорного кольца 102 к наружному кольцу 103 в месте расположения элементов 512 усиливает деформацию сенсорного кольца 102 и, таким образом, усиливает поверхностное механическое напряжение в сенсорном кольце 102, когда оно подвержено силе нагрузки ступицы 600 вдоль оси А-А. Хотя вектор 600 показан имеющим специфическое направление, измерительный преобразователь способен определить нагрузки, имея векторы во всех направлениях. Разумеется, все это может повлиять на общую чувствительность, что во многом зависит от пространственного отношения между вектором 600 и соответственно положением тензодатчика(ов).
Когда измерительный преобразователь находится под нагрузкой, то каждый элемент 512 частично деформируется при соединении с сенсорным кольцом 102. Элементы 512 имеют предварительно заданную жесткость пружины, которая является функцией динамической нагрузки, вызванной измерительным преобразователем, в частности сенсорным кольцом 102. Предварительно заданная жесткость пружины в свою очередь определяет дугообразную форму каждого элемента 512.
Следует понимать, что во время эксплуатации сенсорное кольцо 102 постоянно подвергается вибрационной и циклической нагрузке. Это, в свою очередь, вызывает механические напряжения на соединении между сенсорным кольцом 102 и наружным кольцом 103. Отсюда дугообразная форма элементов 512 увеличивает продолжительность периода эксплуатации измерительного преобразователя путем распределения и рассредоточения механического напряжения и, тем самым, уменьшения его в местах концентрации напряжений, которое, в противном случае, может возникнуть на соединении между сенсорным кольцом 102 и наружным кольцом 103. Это, со своей стороны, уменьшает возможность появления трещин из-за усталости материала, которая может быть вызвана концентрацией напряжения на соединении.
Отверстия 105, 106 в наружном кольце используются для облегчения установки тензодатчиков 301 и 304 на сенсорном кольце 102, см. фиг.3.
Консоль 500 может использоваться для установки блока формирования сигналов тензодатчика. Консоль 500 прикрепляется к наружному кольцу 103. Консоли можно придать желаемую форму или она может быть также отлита в качестве неотъемлемой части наружного кольца 103.
Наружное кольцо 103 обеспечивает структурную прочность измерительному устройству, а также обеспечивает средства введения в контакт измерительного преобразователя с подшипником и шкивом. Наружное кольцо 103 впрессовано в подшипник шкива, в свою очередь этот подшипник задействован со шкивом для приведения в действие ремневого привода. Наружное кольцо 103 достаточно прочно, чтобы выдержать вращение шкива вокруг измерительного преобразователя в ремневой системе передачи.
Кольцо ступицы 101, сенсорное кольцо 102 и наружное кольцо 103 по существу лежат в одной плоскости. Более того, каждое из колец концентрически вложено внутрь другого. Такое размещение колец сокращает до минимума толщину измерительного устройства согласно изобретению и тем самым позволяет использовать измерительный преобразователь в шкиве, например, в существующем в передней части автомобиля вспомогательном приводном блоке, где место для оборудования может быть ограниченным. Измерительный преобразователь может использоваться для замены существующего шкива в ременной системе передачи, позволяя таким образом переоборудование для установки измерительного прибора при малой или никакой модификации существующей системы. Измерительный преобразователь может быть также использован в натяжном устройстве между натяжным устройством шкива и рычагом натяжного устройства на вале натяжного устройства шкива для измерения динамической характеристики вала или динамической характеристики рычага натяжного устройства.
В предпочитаемом варианте осуществления изобретения измерительный преобразователь может быть изготовлен из одного куска материала, например металла. Измерительное устройство может быть также отлито из подходящего материала, такого как пластмасса или керамика в зависимости от нагрузок, которые придется выдерживать измерительному преобразователю.
В другом варианте осуществления изобретения измерительный преобразователь может состоять из трех частей, в том числе кольца ступицы, сенсорного кольца и наружного кольца, соединенных вместе с помощью адгезива или винтов, см. фиг.4А. В варианте осуществления кольцо ступицы и наружное кольцо выполнены из керамического материала и сенсорное кольцо - из металла. В еще одном варианте осуществления кольцо ступицы и наружное кольцо могут быть выполнены из пластмассы при особенно низких нагрузках. В этом случае от пластмассы требуется иметь только достаточный коэффициент и достаточную стойкость к действующим температурам работающего двигателя, на котором она установлена.
Согласно еще одному варианту осуществления изобретения, сенсорное кольцо и внешнее кольцо могут состоять из одной обработанной части с кольцом ступицы, прикрепленной к сенсорному кольцу с помощью винтов или адгезива. В данном варианте осуществления изобретения сенсорное кольцо и внешнее кольцо могут быть выполнены из металла и кольцо ступицы - из керамического материала. При применении относительно низкой нагрузки кольцо ступицы может быть выполнено из пластмассы. В этом случае пластмасса должна проявлять достаточный коэффициент и достаточную стойкость к температурам работающего двигателя, на котором она установлена.
Фиг.2 - вид в перспективе измерительного преобразователя. Измерительный преобразователь 100 показан установленным внутри шкива 200. Подшипник или подшипники 205 напрессовываются на внешнюю сторону наружного кольца 103 с тем, чтобы занять кольцеобразное пространство между наружным кольцом 103 и шкивом 200. Консоль 500 прикреплена к измерительному преобразователю 100 крепежными средствами 501, 502.
Фиг.3 - вид сверху сенсорного кольца измерительного преобразователя. Сенсорное кольцо 102 показано вместе с тензодатчиками 301, 302, 303, 304, расположенными в виде полной мостиковой конфигурации. Тензодатчики соединены проводами 401, 402, 403, 404. Провода 402 и 403 направлены к консоли 500 для присоединения к вводному проводу устройства. Тензодатчики 301 и 304 могут быть присоединены к сенсорному кольцу 102 с помощью отверстий 105 и 106. Тензодатчики ориентированы таким образом, чтобы ось вектора силы А-А была перпендикулярной воображаемой линии В-В между тензодатчиками.
Фиг.4А - вид сверху измерительного преобразователя. В этом варианте осуществления используются отдельное кольцо ступицы 101, сенсорное кольцо 102 и наружное кольцо 103 в соответствии с тем, что уже было описано в данном изобретении. Сенсорное кольцо 102 крепится к наружному кольцу 103 с помощью винтов 203 и 204. Кольцо ступицы 101 крепится к сенсорному кольцу 102 с помощью винтов 201 и 202. Другие крепежные средства колец могут включать сварку, адгезивы, заклепывание или другие подходящие технические средства. Винты 201, 202, 203, 204 направлены, как показано, к оси А-А нагрузки ступицы.
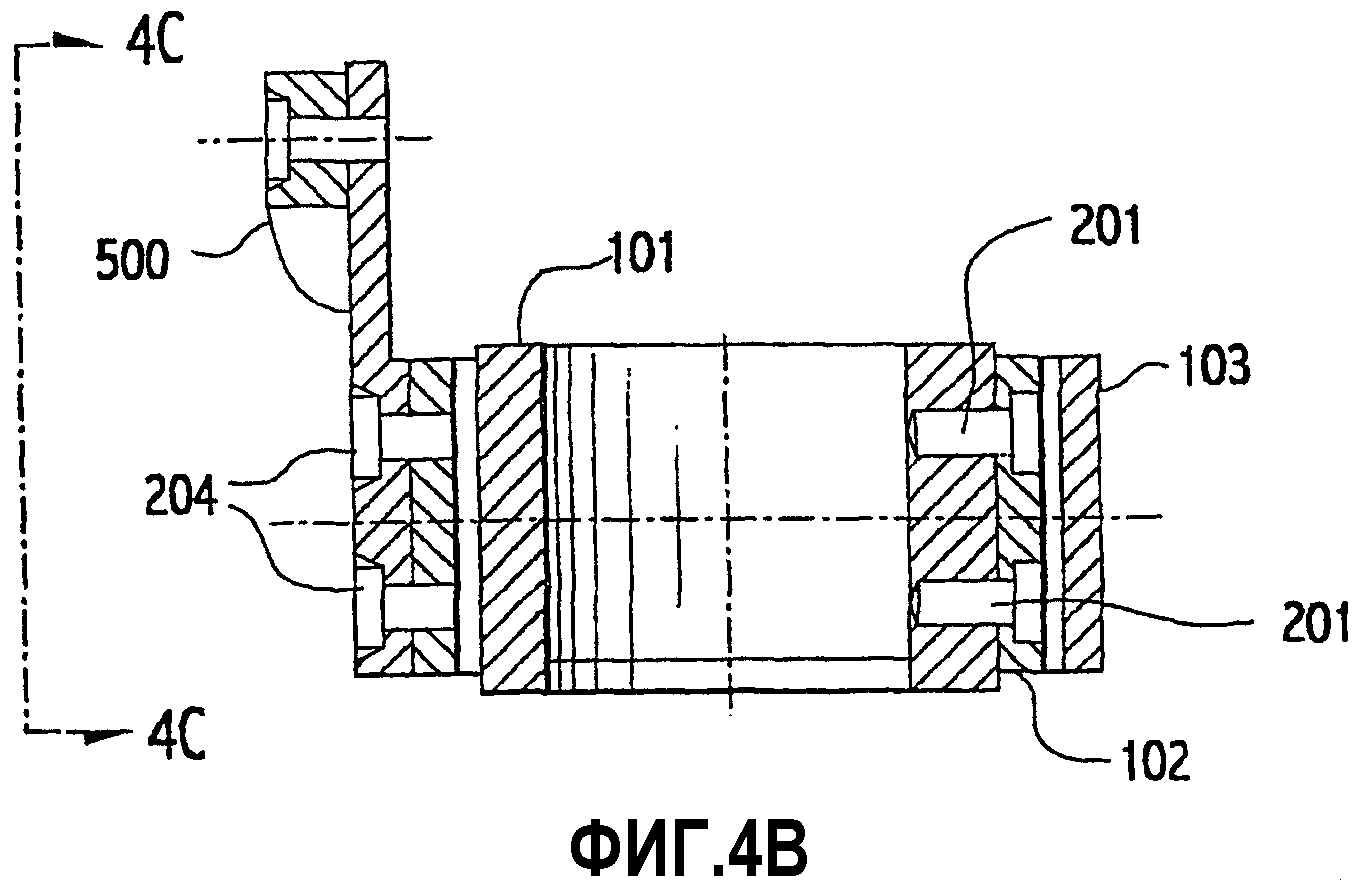
Фиг.4В - вид поперечного разреза фиг.4А по линии 4В-4В. Винты 201 и 204 показаны соединяющими сенсорное кольцо 102 с наружным кольцом 103. Консоль 500 обеспечивает средства для соединения проводов тензодатчика с вводным проводом устройства как описано выше в изобретении.
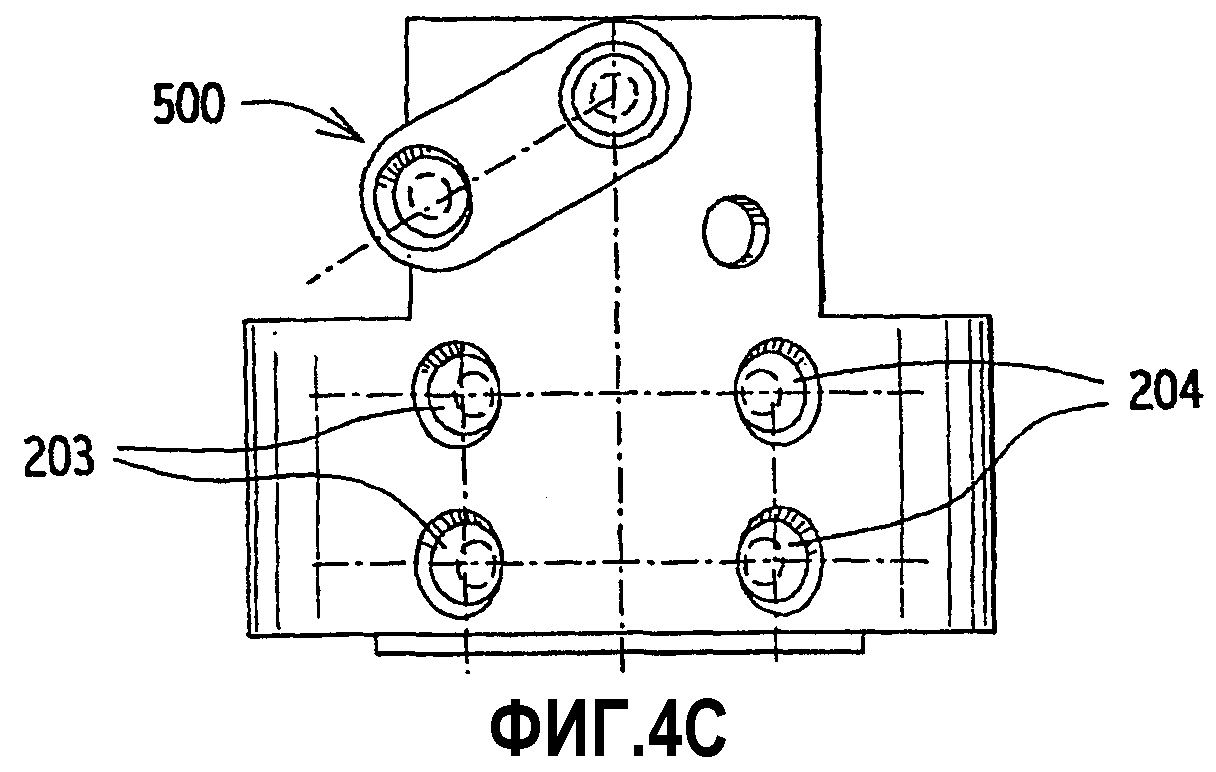
Фиг.4С - вид сбоку по линии 4С-4С в фиг.4В. Винты 203 и 204 показаны соединяющими наружное кольцо 103 с сенсорным кольцом 102.
Фиг.5 - перспективный объемный вид измерительного преобразователя. Подшипники 205 напрессованы на наружное кольцо 103 измерительного преобразователя 100. Шкив 200 напрессован на подшипники 205.
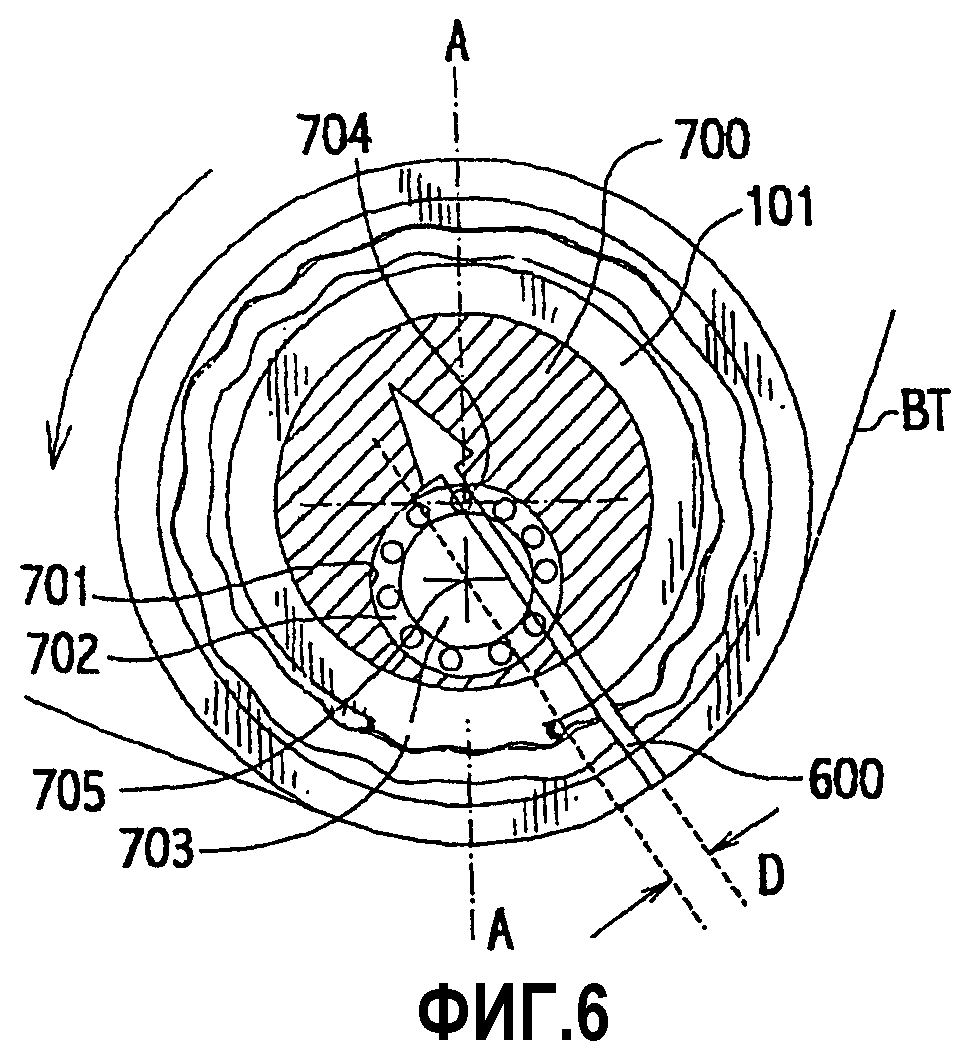
Фиг.6 - частичный вид сверху самовыравнивающейся части. Для оптимизации чувствительности измерительного преобразователя желательно, чтобы сенсорное кольцо было расположено в направлении вектора 600 нагрузки ступицы таким образом, чтобы вектор 600 был совмещен с осью А-А, тем самым совмещая тензодатчики с осью В-В, см. фиг.3. Это может быть дополнено использованием самовыравнивающегося элемента 700.
Следует обратить внимание на то, что эксцентриковый самовыравнивающийся элемент 700 расположен в отверстии 104 внутреннего кольца. В качестве примера эксцентриковый элемент 700 впрессован в отверстие 104. Следует также понять, что элемент 700 может быть просто неотъемлемой составной частью дугообразного внутреннего элемента 101, а именно дугообразный внутренний элемент включает в себя нарезное отверстие 701 с центром 705, который не совмещен с геометрическим центром измерительного преобразователя.
Эксцентриковый элемент 700 имеет нарезное отверстие 701. Центр 705 отверстия 701 расположен эксцентрически на расстоянии от геометрического центра 704 эксцентрикового элемента. Геометрический центр 704 эксцентрикового элемента также совпадает с геометрическим центром измерительного преобразователя и геометрическим центром сенсорного кольца. Подшипник 702 впрессован в отверстие 701. Крепежное средство 703, например винт, проходит сквозь и прикрепляет подшипник 702 и, соответственно, измерительный преобразователь к посадочной поверхности (не показана). При вращении подшипника 702 измерительный преобразователь свободно вращается вокруг крепежного средства 703.
В примере осуществления вектор 600 нагрузки ступицы показан действующим на измерительный преобразователь. Нагрузка ступицы вызвана натяжением ремня ВТ, имеющего натяжение. В примерной конфигурации вектор 600 первоначально горизонтально смещен от центра 705 отверстия на расстояние (D). Сразу же при возникновении нагрузки на ступицу 600 самовыравнивающаяся деталь элемента 700 вступает в действие, что позволяет соответствующим образом регулировать измерительный преобразователь. Более того, расстояние (D) действует как рукоятка, которая вызывает крутящий момент, передаваемый эксцентриковым элементом 700. Крутящий момент заставляет эксцентриковый элемент 700 и соответственно измерительный преобразователь 100 и сенсорное кольцо 102 вращаться вокруг подшипника 702 до того момента, пока вектор 600 не совместится с центром 705, тем самым устраняя самоцентрируемый крутящий момент и восстанавливая равновесие. Этот способ самоцентрирования (самовыравнивания) применяется вне зависимости от направления вектора 600.
Фиг.7 - частичный вид сверху самовыравнивающейся части. Вектор 600 совмещен с центром отверстия 705. В результате этой ориентации тензодатчики 301, 302, 303, 304 находятся в оптимальном положении для измерения, то есть совмещены с осью В-В, как показано на фиг.3.
Примечательно, что измерительный преобразователь может действовать с самовыравнивающимся элементом 700 или без него, как показано на фиг.6 и 7. Использование самовыравнивающегося элемента 700 зависит от требуемой чувствительности измерительного преобразователя. Это частично может также зависеть от диапазона перемещения вектора 600 во время функционирования. Чувствительность измерительного преобразователя является функцией совмещения тензодатчика или тензодатчиков с вектором нагрузки 600. Например, если измерительный преобразователь согласно изобретению используется с натяжным шкивом с узким диапазоном направлений вектора 600, потребность в наличии самовыравнивающегося элемента может быть менее важной. При альтернативном варианте измерительный преобразователь используется на натяжном устройстве, имеющем относительно широкий диапазон перемещения, вызванного движением рычага натяжного устройства, использование самовыравнивающегося элемента предпочтительно для поддержания требуемой чувствительности измерительного преобразователя.
Хотя варианты осуществления изобретения описаны выше, для специалистов будут понятны, могут быть выполнены различные варианты реализации измерительного преобразователя и отдельных частей без отхода от концепции и объема данного изобретения.
Реферат
Данное изобретение относится к измерительному преобразователю для измерения динамической характеристики вала, имеющего концентрические элементы, поддерживающие дугообразный датчик между ними. Измерительный преобразователь (100) для определения динамических характеристик вала содержит дугообразный сенсорный элемент (102), поддерживаемый между внутренним элементом (101) и наружным элементом (103). По меньшей мере, один тензодатчик прикреплен к поверхности дугообразного сенсорного элемента для определения поверхностной деформации, вызванной динамической характеристикой вала. Внутренний элемент, наружный элемент и дугообразный сенсорный датчик являются по существу компланарными. Внутренний элемент содержит средства для прикрепления измерительного преобразователя к посадочной поверхности. Внутренний элемент может также включать самовыравнивающееся средство для оптимизации сенсорной чувствительности. 6 н. и 24 з.п. ф-лы, 7 ил.
Комментарии