Ответная реакция датчика магнитного поля для диагностики - RU2693061C2
Код документа: RU2693061C2
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ
[001] Этот патент в основном относится к датчикам магнитного поля и, в частности, к использованию ответной реакции датчика магнитного поля для диагностики.
УРОВЕНЬ ТЕХНИКИ
[002] Цифровые регуляторы уровня, как правило, содержат вытеснитель (например, поплавковый уровнемер), который линейным перемещением реагирует на уровень и/или плотность текучей среды. Линейное перемещение вытеснителя преобразуется во вращательное движение трубы, передающей крутящий момент, которое приводит к смещению узла рычага с прикрепленным магнитом или группой магнитов (например, от двух до сорока магнитов и т. д.). Перемещение одного или большего количества магнитов обуславливает изменение магнитного поля, измеряемого датчиком Холла, при этом датчик Холла выдает выходной сигнал, который может быть применен для определения управляющего значения технологического процесса (например, определения вытесненного объема текучей среды). Как правило, в цифровой регулятор уровня для обнаружения перемещения магнита (-ов) устанавливают один датчик Холла. На практике нередко бывает сложно определить или диагностировать ухудшение характеристик или неисправность датчика Холла, магнита (-ов) или других компонентов таких регуляторов уровня без осмотра, разборки цифрового регулятора уровня и/или снятия всего цифрового регулятора уровня.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[003] Одно из описанных приведенных в качестве примера устройств содержит первый датчик магнитного поля для обеспечения первого выходного сигнала в качестве реакции на магнитное поле, создаваемое магнитом, присоединенным к подвижной детали устройства управления технологическим процессом, и второй датчик магнитного поля для обеспечения второго выходного сигнала в качестве реакции на магнитное поле. Кроме того, приведенное в качестве примера устройство содержит процессор, выполненный с возможностью использования первого и второго выходных сигналов для генерирования диагностической информации, связанной с ответной реакцией устройства управления технологическим процессом.
[004] Приведенный в качестве примера способ включает генерирование, в первом датчике магнитного поля, первого выходного сигнала в качестве реакции на источник магнитного поля, создаваемый магнитом системы датчиков, генерирование, во втором датчике магнитного поля, второго выходного сигнала в качестве реакции на источник магнитного поля и генерирование, с применением процессора, диагностической информации о рабочем состоянии системы датчиков на основании первого и второго выходных сигналов.
[005] Приведенный в качестве примера материальный машиночитаемый носитель данных содержит хранимые в нем команды, которые, при их исполнении, обуславливают измерение машиной первого выходного сигнала, генерируемого в первом датчике магнитного поля, причем первый выходной сигнал генерируется в качестве реакции на магнитное поле, создаваемое источником магнитного поля системы датчиков, измерение второго выходного сигнала, генерируемого во втором датчике магнитного поля, причем второй выходной сигнал генерируется в качестве реакции на магнитное поле, и генерирование диагностической информации на основании первого и второго выходных сигналов для определения рабочего состояния системы датчиков.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[006] На ФИГ. 1 представлен вид системы цифровых датчиков уровня, в которой могут быть реализованы описанные примеры.
[007] На ФИГ. 2 представлено перспективное изображение с пространственным разделением деталей узла датчика, в котором могут быть реализованы описанные примеры.
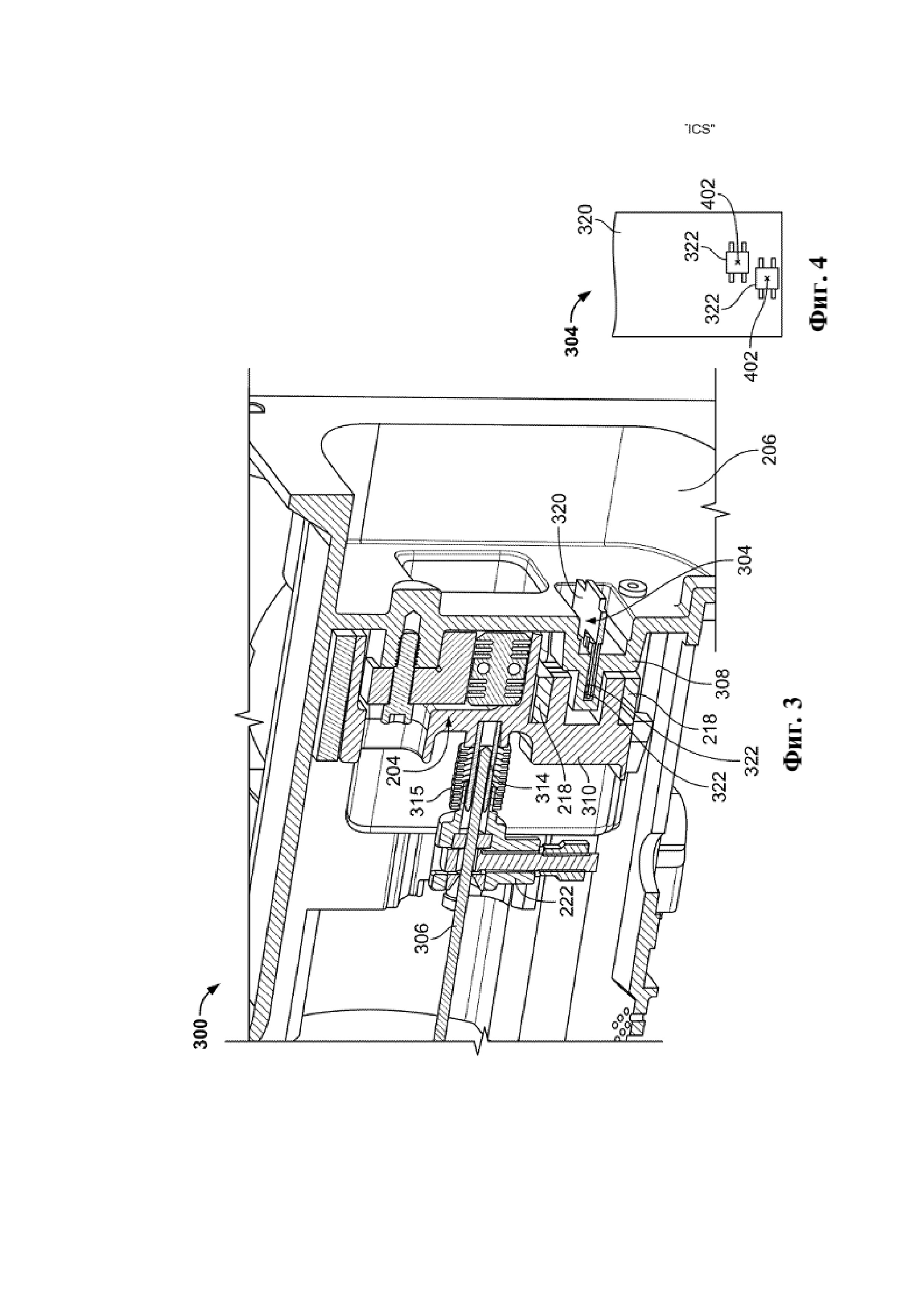
[008] На ФИГ. 3 представлен вид в поперечном разрезе одного из примеров системы датчиков магнитного поля, соответствующего принципам настоящего изобретения.
[009] На ФИГ. 4 представлен частичный вид приведенной в качестве примера печатной монтажной платы системы датчиков магнитного поля по ФИГ. 3.
[0010] На ФИГ. 5 представлен график, изображающий выходные напряжения основного датчика и смещенного датчика относительно переменного магнитного поля в соответствии с примерами, описанными в этом документе.
[0011] На ФИГ. 6 представлен график, изображающий выходное напряжение смещенного датчика относительно выходного напряжения основного датчика в соответствии с примерами, описанными в этом документе.
[0012] На ФИГ. 7 представлена блок-схема, соответствующая приведенному в качестве примера способу, который может быть применен для реализации системы магнитного поля по ФИГ. 3.
[0013] На ФИГ. 8 представлена блок-схема приведенной в качестве примера процессорной платформы, способной исполнять машиночитаемые команды для реализации приведенного в качестве примера способа по ФИГ. 7.
[0014] Фигуры приведены не в масштабе. Напротив, для наглядного изображения нескольких слоев и областей толщина слоев на чертежах может быть увеличена. Везде, где это возможно, одинаковые ссылочные позиции будут применены на всем чертеже (на всех чертежах) и в сопроводительном письменном описании для обозначения одинаковых или аналогичных деталей. Применяемое в данном патенте указание на то, что какая-либо часть (например, слой, покрытие, область или пластина) тем или иным способом расположена на (например, позиционирована, размещена, установлена или сформирована и т. д.) другой части, означает, что часть, обозначенная позицией, либо соприкасается с другой частью, либо часть, обозначенная позицией, находится выше другой части, при этом между ними находится одна промежуточная часть или большее количество промежуточных частей. Указание на то, что любая часть соприкасается с другой частью, означает, что между этими двумя частями отсутствует какая-либо промежуточная часть.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0015] В этом документе описано использование ответной реакции датчика магнитного поля для диагностики. В примерах, описанных в этом документе, система датчиков способна генерировать диагностическую информацию о рабочем состоянии системы датчиков. В примерах, описанных в этом документе, применено несколько датчиков магнитного поля (например, датчиков Холла) для измерения магнитного поля, которое может быть создано и/или изменено источником магнитного поля, например, магнитом на подвижной детали, например, устройства управления технологическим процессом. Датчики магнитного поля, соответствующие примерам, описанным в этом документе, обеспечивают выходные сигналы (например, сигналы напряжения), применяемые для генерирования диагностической информации, связанной с ответной реакцией устройства управления технологическим процессом.
[0016] Многие известные системы датчиков (например, цифровые инструменты измерения уровня) содержат группу магнитов на подвижной детали и один датчик Холла для определения перемещения магнитов при изменении магнитного поля во время перемещения магнитов. Однако точное определение причин неисправности в этих системах затруднено, поскольку эти системы могут выйти из строя таким образом, что не представляется возможным определить, как произошел этот сбой. В частности, сложно определить место возникновения сбоя: магниты, датчик Холла или любой другой компонент. Кроме того, визуальный осмотр таких систем датчиков может быть неудобным, например, в тех случаях, когда системы датчиков находятся в труднодоступных местах.
[0017] В соответствии с примерами, описанными в этом документе, существует возможность выявления неисправностей, в том числе, среди прочих, механических или электрических неисправностей, на основании ответной реакции устройства управления технологическим процессом. Контролируя взаимное соотношение выходных сигналов от датчиков магнитного поля можно определять конкретный вид неисправности (например, неисправность магнита, выход из строя одного или большего количества датчиков магнитного поля, выход из строя электрической схемы и/или электрических компонентов, механическая поломка и т. д.). В некоторых примерах соотношение между выходными сигналами датчиков магнитного поля необходимо периодически определять для генерирования диагностической информации о рабочем состоянии системы датчиков и/или для контроля (например, периодического измерения, многократного измерения и т. д.) функционирования системы датчиков.
[0018] В некоторых примерах источник магнитного поля (например, магнит) закреплен на подвижном рычаге (например, плече рычага) системы датчиков, а первый и второй датчики магнитного поля (например, датчики Холла) расположены и/или установлены на печатной монтажной плате (PCB) и оснащены источником постоянного тока или напряжения. В этих примерах процессор применяет первый и второй выходные сигналы (например, выходные напряжения), генерируемые в качестве реакции на магнитное поле, соответственно, первым и вторым датчиками магнитного поля, для генерирования диагностической информации. В некоторых примерах процессор контролирует соотношение (например, линейное соотношение) между первым и вторым выходными сигналами. В некоторых примерах процессор сравнивает вычисленное соотношение между первым и вторым выходными сигналами с хранимым соотношением и/или диапазоном соотношений, чтобы определить, нормально ли работает система датчиков.
[0019] На ФИГ. 1 представлен вид системы 100 цифровых датчиков уровня, в которой могут быть реализованы описанные примеры. Систему 100 цифровых датчиков уровня по показанному примеру применяют для измерения и/или контроля высоты текучей среды, изменения высоты текучей среды, изменения плотности текучей среды и/или уровня границы раздела между двумя текучими средами. В этом примере система 100 цифровых датчиков уровня содержит узел 102 цифрового регулятора уровня и узел 106 датчика перемещения.
[0020] Узел 102 цифрового регулятора уровня содержит индикатор 108, клеммную коробку 110 и преобразователь 112. Узел 106 датчика перемещения содержит вытеснитель (например, поплавковый уровнемер) 114, шток 116 вытеснителя, корпус 118 с отверстиями 120, концевую часть 122 штока вытеснителя, тягу 124 вытеснителя и трубу 126, передающую крутящий момент.
[0021] В ходе эксплуатации текучая среда может протекать через одно или большее количество отверстий 120, соприкасаясь с вытеснителем 114, который может быть вытеснен из-за его плавучести в текучей среде, изменений плотности текучей среды и/или изменений границы раздела между текучими средами. Перемещение вытеснителя 114, в свою очередь, приводит к линейному перемещению штока 116 вытеснителя и концевой части 122 штока вытеснителя (например, вверх или вниз по ФИГ. 1), таким образом, вызывая вращение тяги 124 вытеснителя вокруг оси 128. Вращение тяги 124 вытеснителя приводит к вращательному движению трубы 126, передающей крутящий момент, через, например, приводной подшипник. Тяга 124 вытеснителя может быть выполнена как единое целое с, например, трубой 126, передающей крутящий момент. В некоторых известных примерах вращение трубы 126, передающей крутящий момент, затем приводит к вращению узла рычага, который может быть соединен с трубой 126, передающей крутящий момент, и одного или большего количества магнитов, прикрепленных к узлу рычага, в результате чего происходит изменение магнитного поля, которое определяет один датчик магнитного поля в узле 102 цифрового регулятора уровня. В этих известных примерах процессор в узле 102 цифрового регулятора уровня принимает входной сигнал (например, выходное напряжение) от датчика магнитного поля и преобразует этот входной сигнал в управляющее значение технологического процесса (например, величину перемещения вытеснителя 114, значение параметра текучей среды и т. д.), режим и/или диагностическое сообщение, отображаемое на индикаторе 108, который может содержать, например, светодиод (светоизлучающий диод) или ЖКД (жидкокристаллический дисплей).
[0022] На ФИГ. 2 представлено перспективное изображение с пространственным разделением деталей узла 200 цифрового датчика уровня, в котором могут быть реализованы описанные примеры. Аналогично узлу 102 цифрового регулятора уровня, описанному выше в отношении ФИГ. 1, узел 200 цифрового датчика уровня принимает измеренные значения магнитного поля, создаваемого и/или измененного источником магнитного поля (например, магнитом, электромагнитом и т.д.), для генерирования выходного сигнала, например, управляющих значений технологического процесса и/или электрических сигналов, передаваемых через клеммы и/или отображаемых, например, на индикаторе. Узел 200 цифрового датчика уровня в показанном примере содержит соединительное кольцо 202, узел 204 рычага, узел 206 преобразователя, электронный модуль 208, узел 210 жидкокристаллического (ЖК) индикатора, крышку 212, клеммную коробку 214 и крышку 216 клеммной коробки.
[0023] В этом примере узел 204 рычага содержит магниты 218, поворотный вал 220 и соединитель 222 трубы, передающей крутящий момент. Соединительное кольцо 202, которое можно присоединять к узлу датчика перемещения, имеет отверстие 219, причем труба, передающая крутящий момент, устройства управления технологическим процессом может проходить через него и соединяться с соединителем 222 трубы, передающей крутящий момент. Узел 206 преобразователя содержит плату 223 преобразователя. Электронный модуль 208 в показанном примере содержит печатную монтажную плату (PCB) 224. Узел 210 ЖК индикатора содержит устройство 225 отображения (например, ЖК-панель и т. д.), которое может быть применено в качестве индикатора для отображения пользователю управляющего значения технологического процесса на основании величины поворота трубы, передающей крутящий момент, и/или узла 204 рычага. Клеммная коробка 214 содержит клеммы 228, которые могут быть применены для присоединения внешней проводки для контроля, технического обслуживания и/или ремонта.
[0024] На ФИГ. 3 представлен вид в поперечном разрезе одного из примеров системы 300 датчиков магнитного поля, соответствующей принципам настоящего изобретения. Система 300 датчиков магнитного поля содержит узел 204 рычага, описанный выше в отношении ФИГ. 2, узел 304 печатной монтажной платы (PCB), трубу 306, передающую крутящий момент, и корпус 308 узла 206 преобразователя. Узел 204 рычага в показанном примере содержит остов 310 рычага, источник магнитного поля, такой как, например, магниты 218, втулку 314 трубы, передающей крутящий момент, пружину 315 и соединитель 222 трубы, передающей крутящий момент, для присоединения трубы 306, передающей крутящий момент, к узлу 204 рычага. Узел 304 печатной монтажной платы содержит печатную монтажную плату 320 и датчики 322 магнитного поля (например, датчики Холла), расположенные на (например, прикрепленные, припаянные и т. д.) печатной монтажной плате 320. Датчики 322 магнитного поля могут быть электрически соединены друг с другом и/или последовательно соединены с источником питания постоянного тока, что позволяет достигнуть более высокой эффективности (например, более высокого электрического коэффициента полезного действия). Альтернативно, в некоторых примерах каждый из датчиков 322 магнитного поля соединен с отдельными источниками питания постоянного тока. Хотя датчики 322 магнитного поля в показанном примере описаны как установленные на печатной монтажной плате 320, датчики 322 магнитного поля могут быть расположены в любом месте системы 300 датчиков магнитного поля (например, на отдельных печатных монтажных платах, соединенных с различными местами на корпусе 308, и т. д.).
[0025] В ходе эксплуатации труба 306, передающая крутящий момент, в показанном примере вращается через посредство узла датчика перемещения, такого как, например, узел 106 датчика перемещения, описанный выше в отношении ФИГ. 1, для генерации сигнала ответной реакции, полученного на основании (например, преобразованного из значения) линейного перемещения подвижной детали и/или узла (например, поплавкового устройства, например, вытеснителя 114 узла 106 датчика перемещения). Это вращение трубы 306, передающей крутящий момент, в свою очередь, приводит к вращению остова 310 рычага и, таким образом, магнитов 218, в результате чего происходит изменение (т. е. искажение, изменение направления) магнитного поля, определяемое датчиками 322 магнитного поля. В этом примере определение значения (-й) магнитного поля и/или изменения магнитного поля позволяет процессору системы 300 датчиков магнитного поля определять и/или обнаруживать движение (например, обнаруживать перемещение, определять величину перемещения и т. д.) трубы 306, передающей крутящий момент, и/или узла 204 рычага, которое может быть вызвано перемещением подвижной детали и/или узла. Выходные сигналы датчиков 322 магнитного поля отличаются (например, изменяются) друг от друга и/или характер изменения выходных сигналов может различаться в диапазоне движения (например, в диапазоне перемещения) узла 204 рычага. Отличие выходных сигналов и/или характеров изменения выходных сигналов может возникать из-за позиционных сдвигов датчиков 322 магнитного поля (например, позиционных сдвигов в двух или большем количестве направлений печатной монтажной платы 320). Один или большее количество выходных сигналов могут применять для определения управляющего значения технологического процесса. Например, процессор может усреднять выходные сигналы в совокупности или вычислять средневзвешенное значение выходных сигналов для определения управляющего значения технологического процесса.
[0026] В этом примере соотношение между выходными сигналами датчиков магнитного поля необходимо контролировать (например, непрерывно или периодически измерять и т. д.) с помощью процессора, который может быть расположен на (например, припаян) узле 304 печатной монтажной платы для генерирования диагностической информации о рабочем состоянии по ответной реакции системы 300 датчиков магнитного поля. Другими словами, соотношение и/или разность между выходными сигналами датчиков 322 магнитного поля контролируют с помощью процессора в диапазоне или части диапазона углового перемещения трубы 306, передающей крутящий момент, и/или узла 204 рычага. В этом примере соотношение и/или разность между выходными сигналами датчиков 322 магнитного поля обуславливает генерацию диагностической информации (например, диагностической информации, связанной с ответной реакцией устройства управления технологическим процессом) и/или предполагает возможность генерации диагностической информации, которая, например, включает информацию о том, неисправен ли один из датчиков 322 магнитного поля и/или отсоединен или откреплен ли один из магнитов 218 от остова 310 рычага, ухудшились ли его характеристики и/или он не функционирует должным образом (например, поврежден и т. д.). Кроме того или в качестве альтернативы, определенный характер изменения выходных сигналов (например, отклонение значений обоих выходных сигналов и т. д.) или отсутствие выходных сигналов может указывать на электрический отказ. Соотношение между выходными сигналами датчиков 322 магнитного поля описано более подробно ниже в отношении ФИГ. 5 и 6. В некоторых примерах для коррекции влияния температуры на датчики 322 магнитного поля (например, колебаний температуры) при определении управляющего значения технологического процесса влияние температуры может быть компенсировано путем установки расчетного соотношения между выходными сигналами датчиков 322 магнитного поля для учета, например, температуры, температурного дрейфа и/или измеренных температур. В этом примере плата преобразователя, например, плата 223 преобразователя, описанная выше в отношении ФИГ. 2, позволяет подключать клеммы к клеммам, например, клеммам 228, для возможности передачи выходных сигналов и/или напряжений и т. д.
[0027] На ФИГ. 4 представлен частичный вид приведенного в качестве примера узла 304 печатной монтажной платы (PCB) приведенной в качестве примера системы 300 датчиков магнитного поля по ФИГ. 3. Как упоминалось выше, узел 304 печатной монтажной платы содержит печатную монтажную плату 320 с датчиками 322 магнитного поля. Датчики магнитного поля расположены со взаимным смещением в двух различных направлениях вдоль плоскости печатной монтажной платы 320 для выдачи различных выходных сигналов в зависимости от магнитного поля. В некоторых примерах датчики 322 магнитного поля размещают на противоположных сторонах печатной монтажной платы 320. Линии магнитной индукции в направлении Xs по ФИГ. 4 могут быть обнаружены датчиками 322 магнитного поля. Хотя для выдачи различных (например, смещенных) выходных сигналов от датчиков магнитного поля 322 применен позиционный сдвиг датчиков 322 магнитного поля в одном или большем количестве направлений, кроме того или в качестве альтернативы, могут быть применены другие способы выдачи различных выходных сигналов, включая различные датчики, различные материалы, окружающие и/или расположенные вокруг каждого из датчиков 322 магнитного поля и т. д. Хотя в этом примере показано два датчика 322 магнитного поля, для генерации диагностической информации может быть применено любое требуемое количество (например, три, четыре, пять и т. д.) датчиков 322 магнитного поля.
[0028] На ФИГ. 5 представлен график 500, изображающий выходные напряжения основного датчика и смещенного датчика относительно переменного магнитного поля в соответствии с примерами, описанными в этом документе. Горизонтальная ось 502 соответствует угловому смещению в градусах источника магнитного поля (например, магнита, группы магнитов и т. д.), расположенного, например, на подвижном узле рычага. Вертикальная ось 504 соответствует выходному напряжению в милливольтах (мВ). Первая линия 506 соответствует выходному напряжению основного датчика магнитного поля относительно углового смещения источника магнитного поля. Аналогично, вторая линия 508 соответствует выходному напряжению смещенного датчика магнитного поля относительно углового смещения. Вторая линия 508 в показанном примере позиционно смещена и имеет наклон, отличный от наклона первой линии 506 основного датчика магнитного поля. Третья линия 510 соответствует разности (т. е. разнице) между выходными напряжениями основного датчика магнитного поля и смещенного датчика магнитного поля. Выходные напряжения основного датчика магнитного поля и смещенного датчика магнитного поля отличаются по всему угловому диапазону движения магнита на узле рычага. Одно или большее количество выходных напряжений могут применять для определения (например, вычисления) управляющего значения технологического процесса.
[0029] В этом примере процессор контролирует выходные сигналы для определения того, являются ли выходные сигналы основного датчика магнитного поля и смещенного датчика магнитного поля аппроксимацией (например, находятся в пределах погрешности, находятся в пределах интервала значений погрешностей и т. д.), соответственно, первой линии 506 и второй линии 508. В некоторых примерах разность между первой линией 506 и второй линией 508 описывают и/или периодически измеряют или контролируют во всем диапазоне углового перемещения источника магнитного поля. Кроме того или в качестве альтернативы, третью линию 510, соответствующую разности между выходными напряжениями основного датчика магнитного поля и смещенного датчика магнитного поля, необходимо описывать и/или периодически измерять или контролировать во всем диапазоне углового перемещения источника магнитного поля. В некоторых примерах выходные сигналы и/или соотношение между выходными сигналами (например, отношение выходных сигналов) датчиков магнитного поля могут сравнивать с хранимыми данными, которые могут соответствовать нормальному рабочему состоянию, для генерирования диагностической информации по ответной реакции. В некоторых примерах отношение выходных сигналов датчиков магнитного поля периодически и/или непрерывно сравнивают с хранимым отношением.
[0030] Наличие нескольких датчиков магнитного поля позволяет генерировать и/или определять диагностическую информацию системы определения ответной реакции датчика. Например, один датчик магнитного поля может выйти из строя и, таким образом, не выдавать выходной сигнал в пределах расчетного диапазона (например, в пределах расчетных параметров), а второй датчик магнитного поля, которое работает правильно, продолжает выдавать выходной сигнал в пределах своего расчетного диапазона, тем самым указывая, что первый датчик магнитного поля вышел из строя и/или что на первый датчик магнитного поля не поступает питание или оно недостаточно, что может указывать, например, на частичное нарушение работоспособности схемы. Кроме того, в некоторых примерах некорректные или недопустимые выходные сигналы от обоих датчиков магнитного поля, которые могут быть неправдоподобными, указывают на неисправность магнита (например, повреждение), на то, что оба магнита вышли из строя или повреждены, схема обработки выходных сигналов датчиков магнитного поля неисправна и/или на отказ схемы питания магнитов. Изменение соотношения выходных сигналов и/или изменение наклона кривой одного или большего количества выходных сигналов (например, линий 506 и 508) может указывать на ухудшение состояния магнита (например, уменьшение мощности магнита). Другими словами, изменение магнитного поля, создаваемого магнитом, из-за снятия магнита с рычага, например, может привести к смещению обоих линий выходных сигналов (например, линий 506 и 508). В некоторых примерах смещение обоих выходных сигналов приблизительно к нулю может указывать на электрический сбой (например, сбой в электрической цепи, отказ электрического компонента и т. п.). В противоположность этому, системы, содержащие только один датчик магнитного поля, не способны генерировать такую диагностическую информацию из-за, как правило, невозможности указания в выходном сигнале информации о том, неисправен ли датчик магнитного поля, неисправен ли магнит (например, поврежден или потерял мощность), неисправна ли схема, принимающая выходной сигнал датчика магнитного поля, и/или неисправна ли схема питания датчика магнитного поля.
[0031] На ФИГ. 6 представлен график 600, изображающий выходное напряжение смещенного датчика относительно выходного напряжения основного датчика в соответствии с примерами, описанными в этом документе. Горизонтальная ось 602 соответствует выходному напряжению в милливольтах (мВ) основного датчика. Вертикальная ось 604 соответствует выходному напряжению в милливольтах (мВ) смещенного датчика. В этом примере линия 606, которая является линейной, соответствует выходному напряжению основного датчика магнитного поля по отношению к смещенному датчику. График 600 представляет собой один из примеров соотношения между параметрами датчиков магнитного поля, которые можно контролировать и периодически измерять. В частности, выходные сигналы основного и смещенного датчиков можно постоянно сравнивать, с помощью процессора, с помощью линии 606 (например, в пределах погрешности линии 606).
[0032] В этом примере отклонение линии 606 (например, смещение или изменение формы линии 606 и т. д.) может указывать на неисправность одного или большего количества датчиков магнитного поля и/или на отказ магнита. В некоторых примерах изменение наклона линии 606 может указывать на неисправность одного или большего количества датчиков магнитного поля и/или на ухудшение свойств магнита. Изменение общей формы линии 606 (например, одно или большее количество выходных напряжений становятся равными нулю) может указывать на выход из строя одного или большего количества датчиков магнитного поля. В некоторых примерах соотношение (-я), например, показанное на графиках 500 и 600, может быть сохранено в запоминающем устройстве устройства контроля, например, в виде таблицы (например, таблицы с двумя или большим количеством столбцов). Причем устройство контроля может периодически и/или непрерывно производить выборку выходных сигналов основного и смещенного датчиков магнитного поля для сопоставления дискретных выходных значений с таблицей для установления того, что соотношение между выходными сигналами соответствует (например, поддерживается в пределах погрешности линии 606) соотношению, показанному на графике 600. В некоторых примерах, один или большее количество датчиков магнитного поля могут регулировать (например, оптимизировать, калибровать и т. д.) для улучшения линейности и/или соотношения между выходными сигналами путем изменения магнитного поля во время производства или сборки с контролем ответного выходного сигнала (-ов) и настраивать (например, балансировать) выходной сигнал (-ы) для коррекции отклонения от линейного изменения (например, неравномерности выходного сигнала (-ов)) и/или повышения, например, линейности выходного сигнала (-ов). В некоторых примерах, один или большее количество датчиков магнитного поля располагают (например, размещают) соответствующим образом для улучшения линейности и/или соотношения между выходными сигналами.
[0033] Блок-схема, отражающая приведенный в качестве примера способ реализации системы 300 датчиков магнитного поля по ФИГ. 3, приведена на ФИГ. 7. В этом примере способ может быть реализован с применением машиночитаемых команд, которые содержат программу для исполнения процессором, таким как процессор 812, показанный в примере процессорной платформы 800, описанной ниже в отношении ФИГ. 8. Программа может быть реализована в программном обеспечении, хранимом на материальном машиночитаемом носителе данных, таком как компакт-диск (CD-ROM), гибкий диск, накопитель на жестких дисках, цифровой универсальный диск (DVD), диск Blu-ray или запоминающее устройство, связанное с процессором 812, но вся программа и/или ее часть альтернативно может быть исполнена с помощью устройства, отличного от процессора 812, и/или может быть реализована в аппаратно реализованном программном обеспечении или специализированном аппаратном обеспечении. Кроме того, хотя приведенная в качестве примера программа описана со ссылками блок-схему, показанную на ФИГ. 7, альтернативно могут быть применены многие другие способы реализации приведенной в качестве примера системы 300 датчиков магнитного поля. Например, может быть изменен порядок выполнения этапов и/или могут быть изменены, исключены или объединены некоторые описанные этапы.
[0034] Как упомянуто выше, приведенный в качестве примера способ по ФИГ. 7 может быть реализован с применением кодированных команд (например, пригодных для ввода в вычислительную машину и/или машиночитаемых команд), хранимых на материальном машиночитаемом носителе данных, таком как накопитель на жестких дисках, электрически перепрограммируемое постоянное запоминающее устройство, постоянное запоминающее устройство (ПЗУ), компакт-диск (CD), цифровой универсальный диск (DVD), кэш, оперативное запоминающее устройство (ОЗУ) и/или любое другое устройство хранения данных или дисковое запоминающее устройство, в котором данные сохраняются в течение любого времени (например, в течение длительных периодов времени, постоянно, в течение коротких периодов времени, в течение временной буферизации и/или в течение кэширования данных). В контексте данного документа термин «материальный машиночитаемый носитель данных» определен явным образом как включающий машиночитаемый носитель данных и/или дисковое запоминающее устройство любого типа, как не включающий распространяющиеся сигналы и как не включающий среду передачи данных. В контексте данного документа термин «материальный пригодный для ввода в вычислительную машину носитель данных» и термин «материальный машиночитаемый носитель данных» применяют как взаимозаменяемые. Кроме того или в качестве альтернативы, приведенный в качестве примера способ по ФИГ. 7 может быть реализован с применением кодированных команд (например, пригодных для ввода в вычислительную машину и/или машиночитаемых команд), хранимых на энергонезависимом пригодном для ввода в вычислительную машину и/или машиночитаемом носителе данных, таком как накопитель на жестких дисках, электрически перепрограммируемое постоянное запоминающее устройство, постоянное запоминающее устройство, компакт-диск, цифровой универсальный диск, кэш, оперативное запоминающее устройство и/или любое другое устройство хранения данных или дисковое запоминающее устройство, в котором данные сохраняются в течение любого времени (например, в течение длительных периодов времени, постоянно, в течение коротких периодов времени, в течение временной буферизации и/или в течение кэширования данных). В контексте данного документа термин «энергонезависимый машиночитаемый носитель данных» определен явным образом как включающий машиночитаемый носитель данных и/или дисковое запоминающее устройство любого типа, как не включающий распространяющиеся сигналы и как не включающий среду передачи данных. В контексте данного документа применение фразы «по меньшей мере» в качестве переходного термина в ограничительной части формулы изобретения предполагает возможность изменения, так же, как и термин «содержит» предполагает возможность изменения.
[0035] Способ по ФИГ. 7 начинается на этапе 700, где источник магнитного поля (например, магниты 218) на подвижной детали (например, узле 204 рычага) создает и/или изменяет магнитное поле системы датчиков (этап 700). Первый выходной сигнал генерируется в первом датчике магнитного поля, например, одном из датчиков 322 магнитного поля, описанных выше в отношении ФИГ. 3, в качестве реакции на магнитное поле. Затем генерируется второй выходной сигнал на втором датчике магнитного поля (например, одном из датчиков 322 магнитного поля) в качестве реакции на магнитное поле (этап 704). В некоторых примерах затем вычисляют соотношение между первым и вторым выходными сигналами (этап 706). Затем процессор генерирует диагностическую информацию о рабочем состоянии системы датчиков на основании одного или большего количества из первого и второго выходных сигналов, соотношения первого и второго выходных сигналов и/или любых соотношений, например, ожидаемого характера изменения первого и второго входных сигналов по отношению друг к другу, например, показанного на графиках 500 и 600, описанных выше в отношении, соответственно, ФИГ. 5 и 6 (этап 708). В некоторых примерах, если соотношение находится за пределами допустимого диапазона (этап 710), генерируют предупреждение (этап 712) на индикаторе, например, индикаторе 108, показанном выше в отношении ФИГ. 1, и определяют, следует ли завершить способ (этап 714). В некоторых примерах, если соотношение находится в пределах допустимого диапазона, то определяют, следует ли завершить способ (этап 714). Если определено, что способ не завершен (этап 714), способ повторяют (этап 702). Альтернативно, если определено, что способ завершен (этап 714), способ завершают (этап 716).
[0036] На ФИГ. 8 представлена блок-схема приведенной в качестве примера процессорной платформы 800, способной исполнять команды для реализации способа по ФИГ. 7 и, в более общем смысле, системы 300 датчиков магнитного поля по ФИГ. 3. Процессорная платформа 800 может представлять собой, например, сервер, персональную вычислительную машину, мобильное устройство (например, сотовый телефон, смартфон, планшет, например, iPadTM), персональный цифровой помощник (PDA), устройство для доступа в Интернет, DVD-плеер, CD-плеер, цифровой видеомагнитофон, Blu-Ray-плеер, игровую приставку, персональный видеомагнитофон, телевизионную приставку или вычислительное устройство любого другого типа.
[0037] Процессорная платформа 800 в показанном примере содержит процессор 812. Процессор 812 в показанном примере представляет собой аппаратное средство. Например, процессор 812 может быть реализован с помощью одной или большего количества интегральных схем, логических схем, микропроцессоров или контроллеров любого требуемого семейства или производителя.
[0038] Процессор 812 в показанном примере содержит локальное запоминающее устройство 813 (например, кэш). Процессор 812 в показанном примере соединен с основным запоминающим устройством, которое включает энергозависимое запоминающее устройство 814 и энергонезависимое запоминающее устройство 816, посредством шины 818. Энергозависимое запоминающее устройство 814 может быть реализовано с помощью синхронного динамического запоминающего устройства с произвольной выборкой (SDRAM), динамического запоминающего устройства с произвольной выборкой (DRAM), динамического запоминающего устройства с произвольной выборкой Rambus с внутренней шиной (RDRAM) и/или запоминающего устройства с произвольной выборкой любого другого типа. Энергонезависимое запоминающее устройство 816 может быть реализовано с помощью электрически перепрограммируемого постоянного запоминающего устройства и/или запоминающего устройства любого другого требуемого типа. Доступом к основному запоминающему устройству 814, 816 управляют с помощью контроллера запоминающего устройства.
[0039] Процессорная платформа 800 в показанном примере также содержит схему 820 интерфейса. Схема 820 интерфейса может быть реализована с применением стандарта интерфейса любого типа, например, интерфейса Ethernet, универсальной последовательной шины (USB) и/или интерфейса PCI express.
[0040] В показанном примере к схеме 820 интерфейса подключено одно или большее количество устройств 822 ввода. Устройство (-а) 822 ввода позволяет (-ют) пользователю вводить данные и команды в процессор 812. Устройство (-а) ввода может быть реализовано с помощью, например, аудиосенсора, микрофона, камеры (фотокамеры или видеокамеры), клавиатуры, кнопочного устройства, мыши, сенсорного экрана, трекпада, трекбола, джойстика и/или системы распознавания речи.
[0041] Кроме того, в показанном примере к схеме 820 интерфейса подключено одно или большее количество устройств 824 вывода. Устройства 824 вывода могут быть реализованы, например, с помощью устройств индикации (например, светоизлучающего диода (LED), органического светоизлучающего диода (OLED), жидкокристаллического дисплея, дисплея с электронно-лучевой трубкой (CRT), сенсорного экрана, сенсорного устройства вывода, принтера и/или громкоговорителей). Таким образом, схема 820 интерфейса в показанном примере, как правило, содержит карту графического драйвера, микросхему графического драйвера или процессор графического драйвера.
[0042] Кроме того, схема 820 интерфейса в показанном примере содержит коммуникационное устройство, например, передатчик, приемник, приемопередатчик, модем и/или сетевую интерфейсную плату для осуществления обмена данными с внешними машинами (например, вычислительными устройствами любого вида) посредством сети 826 (например, Ethernet-соединения, цифровой абонентской линии связи (DSL), телефонной линии, коаксиального кабеля, системы сотовой телефонной связи и т. д.).
[0043] Процессорная платформа 800 в показанном примере также содержит одно или большее количество запоминающих устройств 828 большой емкости для хранения программного обеспечения и/или данных. Примеры таких запоминающих устройств 828 большой емкости включают накопители на гибких дисках, накопители на жестких дисках, накопители на компакт-дисках, накопители на дисках Blu-ray, RAID-системы и накопители на универсальных цифровых дисках (DVD).
[0044] Кодированные команды 832 для реализации способа по ФИГ. 7 могут хранить в запоминающем устройстве 828 большой емкости, в энергозависимом запоминающем устройстве 814, в энергонезависимом запоминающем устройстве 816 и/или на съемном материальном машиночитаемом носителе данных, например, на CD-диске или DVD-диске.
[0045] Несмотря на то, что в данном документе были описаны конкретные приведенные в качестве примера устройство и способы, объем защиты этого патента не ограничивается ими. Напротив, этот патент охватывает все способы, устройства и изделия промышленного производства, в известной степени входящие в объем измененной формулы изобретения либо буквально, либо в рамках доктрины эквивалентов. Хотя устройства управления технологическим процессом описаны на примерах, раскрытых в этом документе, описанные в этом документе примеры могут быть применены к любой системе датчика, в которой применяют источник (-и) магнитного поля.
Реферат
Группа изобретений относится к датчикам магнитного поля и, в частности, к использованию ответной реакции датчика магнитного поля для диагностики. Устройство для диагностики датчиков содержит первый датчик магнитного поля для обеспечения первого выходного сигнала в качестве реакции на магнитное поле, создаваемое магнитом, присоединенным к подвижной детали устройства управления технологическим процессом; второй датчик магнитного поля для обеспечения второго выходного сигнала в качестве реакции на магнитное поле; и процессор, выполненный с возможностью использования первого и второго выходных сигналов посредством сравнения первого и второго выходных сигналов с хранимыми данными для генерирования тем самым диагностической информации, связанной с ответной реакцией устройства управления технологическим процессом. Технический результат – повышение точности диагностики датчиков. 3 н. и 16 з.п. ф-лы, 8 ил.
Комментарии