Способ навигации летательного аппарата с использованием высокоточного одноэтапного пеленгатора и адресно-ответной пакетной цифровой радиолинии в дкмв диапазоне - RU2613369C1
Код документа: RU2613369C1
Чертежи



Описание
Область техники
Изобретение относится к области навигации летательных аппаратов с использованием пассивного радиолокационного способа определения местоположения летательного аппарата на основе приема и цифровой обработки сигналов, созданных источником электромагнитных излучений, размещенных на его борту. Изобретение предназначено для создания автономных и комплексных систем навигации летательных аппаратов и навигационных комплексов, обеспечивающих оперативную поддержку навигации и сопровождения летательных аппаратов за счет передачи измеренных координат на борт летательного аппарата. Такие навигационные комплексы представляют наибольшую ценность для навигации в малозаселенных и труднодоступных районах, оснащение которых стандартными техническими комплексами может быть дорогостоящим или технически сложным.
Изобретение используется для решения технической задачи навигационного сопровождения летательного аппарата, состоящей в определении пеленга на него и координат его местоположения. Достигаемый технический результат изобретения состоит в повышении точности оценки местоположения летательного аппарата, в повышении быстродействия навигационного обеспечения и снижении требований к бортовым вычислительным комплексам.
Уровень техники
Современный уровень требований к безопасности полетов определяет потребность в системах, позволяющих определять с высокой точностью координаты летательных аппаратов ЛА военного и гражданского назначения в течение совершаемого ими полета по заданному маршруту следования. Существует несколько основных способов обеспечения навигационного обеспечения, к числу которых следует отнести инерциальные навигационные системы (ИНС), спутниковые навигационные системы (СНС), системы дальней навигации (СДН), запросно-ответные системы навигации (ЗОСН).
В ИНС определение местоположения ЛА осуществляется путем аналогового или цифрового интегрирования навигационных параметров, формируемых на основе показаний инерциальных датчиков, таких как значения угловой скорости и ускорения [1]. В силу автономности преимущество этого способа навигации заключается в высокой помехоустойчивости, однако его недостатком является накопление ошибок в интеграторах с течением времени, что может потребовать периодической коррекции местоположения ЛА за счет применения радиотехнических способов навигации: СНС или СДН.
В СНС вычисление навигационных параметров ЛА осуществляется с использованием сигналов нескольких навигационных спутников, формирующих рабочее созвездие [2]. Достоинствами способа на основе СНС являются глобальность его применения и высокая потенциальная точность получаемых оценок, в то время как к недостаткам можно отнести низкую помехоустойчивость, высокую (по требованиям безопасности полетов) вероятность отказа: местоопределение с использованием СНС может оказаться невозможным, если в зону радиовидимости спутниковой антенны ЛА попадет недостаточное количество навигационных спутников. На практике часто отмечается такой недостаток, как низкая точность оценки вертикальной координаты (высоты) ЛА, что особенно критично для маневренных ЛА. Следует отметить, что для них также характерна высокая изменчивость видимого рабочего созвездия спутников в процессе полета.
Существующие СДН основываются на дальномерном или разностно-дальномерном способе определения местоположения летательного аппарата [3]. Такие системы, как Loran-C и Omega, предполагают развертывание на местности системы базовых станций, излучающих пачки когерентных импульсов известной структуры с заполнением гармоническим сигналом, соответствующим километровым (длинным) или мириаметровым (сверхдлинным) волнам, требуемая дальность для которых обеспечивается с помощью распространения сигналов посредством поверхностных волн. Сигналы от нескольких излучающих станций принимаются на борту летательного аппарата, где производится их обработка, направленная на вычисление фазовых сдвигов между импульсами различных последовательностей. Дальнейшие вычисления, проводимые над фазовыми сдвигами в цифровой ЭВМ или спецвычислителе, позволяют получить оценки местоположения с точностью порядка 400 м при единичном измерении.
ЗОСН представляют собой системы навигации, принцип действия которых основывается на формировании оценок местоположения летательного аппарата наземным активным или пассивным радиолокационным комплексом и последующей передаче полученных оценок на борт воздушного судна по пакетной цифровой радиолинии. Преимуществом ЗОСН является их независимость от условий приема сигнала бортовой аппаратурой и возможность формирования точных оценок за счет применения вычислительно-затратных методов, необходимые вычисления для которых проводятся в наземном вычислительном комплексе, на который, в отличие от бортовой ЭВМ, не накладывается жестких массогабаритных ограничений или ограничений по потребляемой электрической мощности.
За последние двадцать лет изыскиваются совершенно различные способы улучшить характеристики навигационных систем. Так, в патенте [4] предлагается применение комплексного подхода, состоящего в совместном использовании трех методов (ИНС, СНС, СДН) получения навигационной информации, при котором результаты, полученные одним из методов, служат в качестве грубого приближения и уточняются другим методом; выбор метода грубого измерения определяется текущей полетной обстановкой.
В патенте [5] предложен способ повышения точности оценок навигационных параметров за счет использования эталонной карты местности, составленной известным способом до начала движения летательных аппаратов, выбора мерного участка местности эталонной карты, составления текущей карты измерений параметров мерного участка эталонной карты с помощью радиоволн, сравнения полученных значений мерного участка текущей и эталонных карт, вычисления сигнала коррекции траектории движения на базе определения результатов многолучевых измерений по трем координатам.
В патенте [6] предложен близкий способ решения задачи пеленгации сигнала для определения местоположения летательного аппарата, который состоит в том, что сигнал бортового передатчика принимается с помощью антенн, образующих кольцевую решетку, располагаемую вблизи и параллельно земной поверхности. В предложенном способе определение азимута объекта по принятым антеннами решетки сигналам производится путем преобразования измерений в угловой спектр посредством умножения на комплексно-сопряженные диаграммы направленности антенн и последующего суммирования результатов кросс-произведений по всей совокупности антенн и определения квадрата модуля суммы. Однако предложенный способ не является оптимальным потому, что проводимое усреднение не учитывает отношения сигнал-шум в каждом канале измерения, что ведет к формированию неэффективной оценки координат (т.е. существует другая оценка координат в классе несмещенных и состоятельных оценок, которая обладает наименьшей дисперсией).
Раскрытие изобретения
Техническая задача изобретения состоит в обеспечении пилота и/или системы управления воздушным судном точными координатами местоположения летательного аппарата.
Результат достигается за счет оценивания пеленгов в наземной системе, состоящей из высокоточных одноэтапных пеленгаторов, а также за счет формирования оценки местоположения на основе оценок пеленга в наземном вычислительном центре и передачи сформированных координат на борт воздушного судна по адресно-ответной пакетной цифровой радиолинии, работающей в ДКМВ диапазоне.
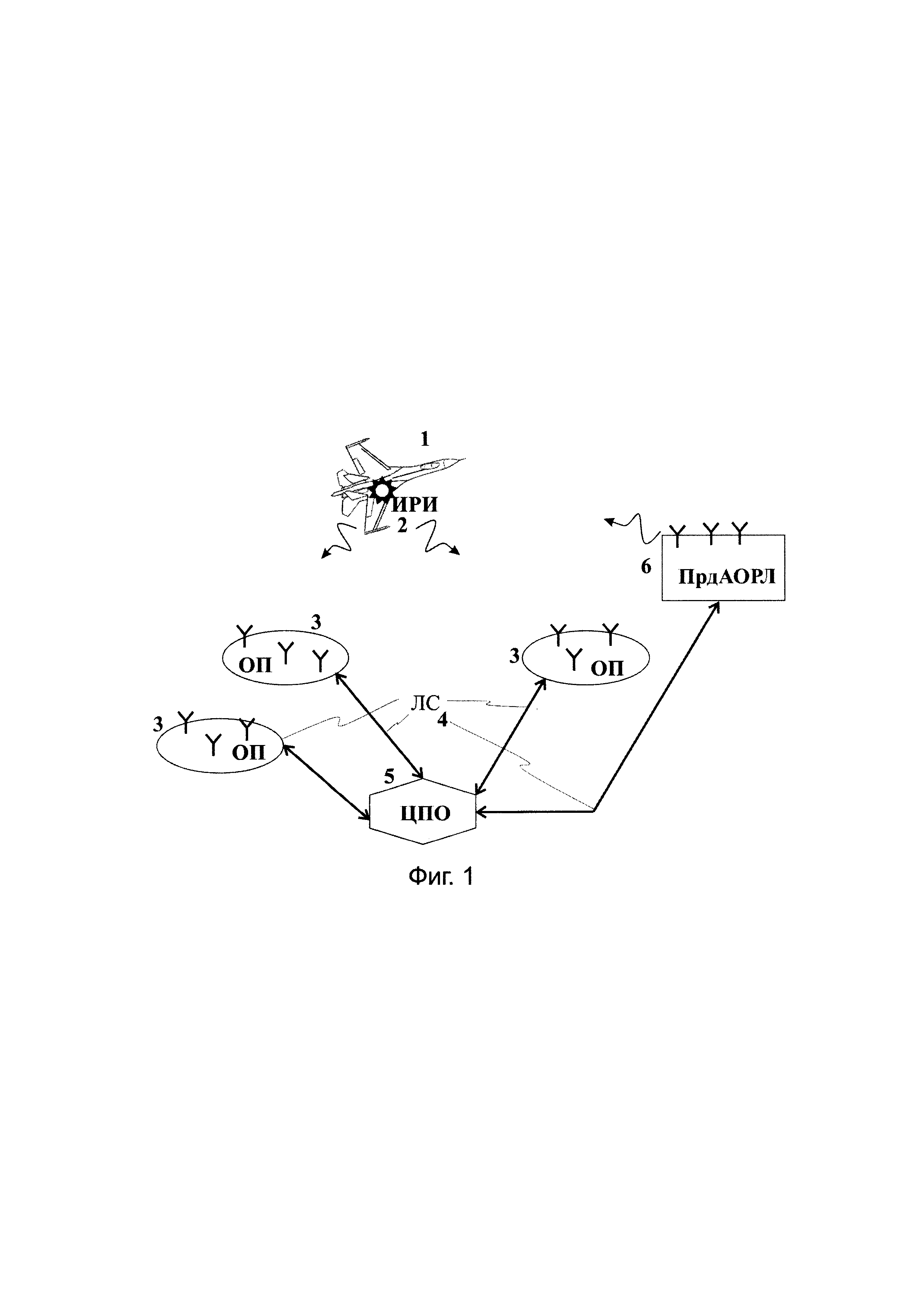
На фиг. 1 представлена структурная схема, поясняющая реализацию предлагаемого способа. Летательный аппарат (ЛА) (1) имеет на своем борту источник радиоизлучения (ИРИ) (2), в качестве которого может выступать как специально установленный для пеленгования источник, создающий сигнал с заданными спектральными и корреляционными характеристиками, так и штатный источник радиоизлучения, например, такой как передатчик радиолинии «воздушное судно-земля». На поверхности земли размещаются приемные пункты, оснащенные одноэтапными пеленгаторами (ОП) (3), в структуру которых входит антенная система на основе активной фазированной антенной решетки, цифрового приемника и блока цифровой обработки сигналов, построенного на основе универсальной цифровой ЭВМ. Приемные пункты соединены наземными или радиорелейными линиями связи (ЛС) (4) с центральным пунктом обработки (ЦПО) (5), который территориально может располагаться как автономно, так и быть совмещенным с одним из пунктов приема, оснащенных ОП (3). В ЦПО происходит формирование оценок местоположения ЛА на основе объединения оценок, полученных отдельными ОП. Сформированные оценки местоположения передаются по линии связи на передатчик адресно-ответной радиолинии (ПрдАОРЛ) (6), осуществляющий передачу в ДКМВ диапазоне радиосигнала, содержащего полезную информацию о местоположении, адресованную получателю (ЛА, местоположение которого оценивается) в форме пакетов цифровых данных.
Источник радиоизлучения (ИРИ) (2) порождает электромагнитный сигнал, для описания которого используется модель гауссовского радиосигнала:

где K - число учитываемых составляющих,


Излученный радиосигнал в форме плоской электромагнитной волны принимается одноэтапным пеленгатором (ОП), реализованным по принципу узкобазовой подсистемы (УП) [8]. Согласно данному принципу ОП является технически единой приемной станцией, реализующей многоканальный прием электромагнитной волны посредством отдельных точек приема (ТП), размещение которых в структуре антенной системы УП удовлетворяет следующим двум условиям:
1. Расстояние между ТП одной и той же УП существенно меньше расстояния между УП и ИРИ. Данное условие обеспечивает плоскую форму фронта волны в точках приема и одинаковый уровень ослабления сигналов, принимаемых разными ТП.
2. Расстояние между ТП одной и той же УП не превышает половины длины волны

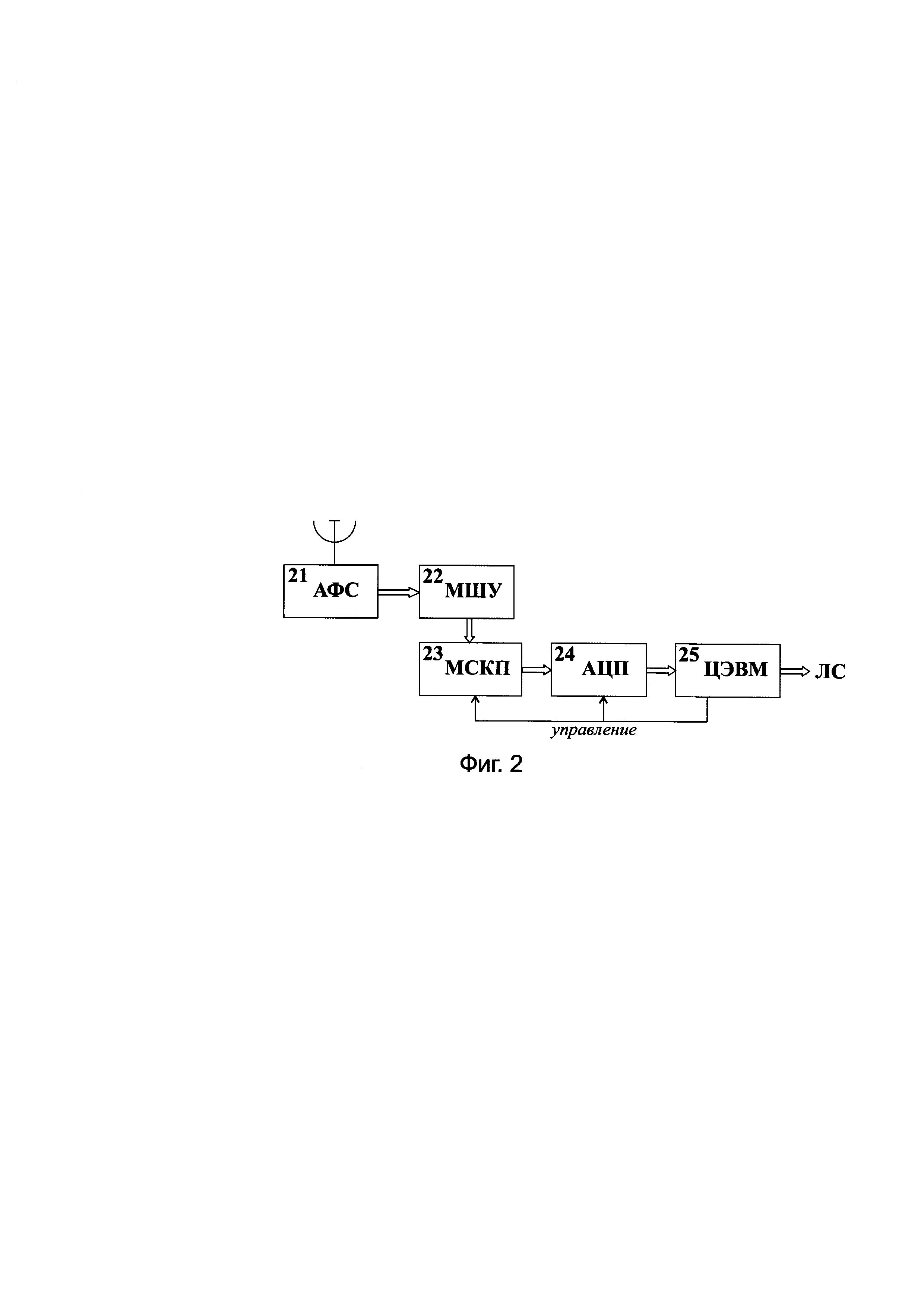
Структурная схема станции, реализованная по принципу УП, представлена на фиг. 2. Так, УП состоит из антенно-фидерной системы (АФС) (21), блока малошумящих усилителей (МШУ) (22), многоканального синхронного квадратурного приемника (МСКП) (23), блока аналого-цифровых преобразователей (АЦП) (24) и цифровой ЭВМ (ЦЭВМ) (25), соединенной линией связи (ЛС) (5) с ЦПО. Блок МШУ осуществляет предварительное усиление сигналов до его передачи на вход МСКП. Блоки МСКП, АЦП являются программно-управляемыми, режим работы которых задается управляющими сигналами ЦЭВМ. При приеме электромагнитные колебания трансформируются антенной системой в аналоговый электрический радиосигнал, который поступает на вход МШУ, с выхода которого радиосигнал поступает на вход МСКП. В результате синхронного детектирования на выходе МСКП формируется аналоговый видеосигнал, поступающий в форме пар квадратур на вход АЦП, на выходе которого формируется цифровой сигнал в форме цифровых отсчетов.
ЦЭВМ реализуется на основе высокопроизводительной многопроцессорной рабочей станции, оснащенной не менее чем двумя многоядерными универсальными процессорами класса Intel Xeon с рабочей частотой не менее 1,8 ГГц и оперативным запоминающим устройством (ОЗУ) объемом не менее 8 Гб. ЦЭВМ в структуре ОП выполняет все необходимые функции по управлению работой блоков ОП за счет задания требуемых функциональных режимов и параметров работы. Кроме того, ЦЭВМ отдельными ОП управляет передачей данных по линиям связи (4), связывающим ОП с ЦПО, в том числе обеспечивает компрессию и при необходимости шифрование данных перед их передачей по линии связи.
Отличительная особенность предлагаемого способа навигации состоит в том, что вычислительная система в составе ЦПО выполняет оценивание координат ЛА путем объединения оценок высокоточных пеленгаторов, формирующих оценки пеленга на ИРИ, расположенный на борту ЛА, с использованием одноэтапного способа, содержание которого заключается в следующем.
Пусть ИРИ расположен в точке пространства, координаты которой заданы вектором r=(X, Y, Z)T. Тогда сигнал, принятый m-й ТП, состоящей в структуре n-го ОП, представляет собой сумму задержанного и взвешенного полезного сигнала и аддитивного шума:

где an - амплитуда сигнала на входах ТП n-го ОП;





Цифровые отсчеты всех принятых сигналов передаются по высокоскоростным линиям связи в центр обработки данных, расположенный в структуре ЦПО. Цифровые сигналы, принятые отдельными ТП каждого ОП, рассматриваются совместно и формируют многомерный цифровой сигнал.
Оценка координат производится с использованием угломерного способа оценивания, при котором вся распределенная система рассматривается как пассивная радиолокационная система, состоящая из узкобазовых подсистем (ПСУП). Суть метода оценивания такой системы состоит в вычислении оценки разности прихода сигналов на основе корреляционного приема по методу максимального правдоподобия, который для двух точек приема представлен в зарубежной работе [7].
Развитие теоретических основ корреляционного метода для возможности его применения к решению задачи местоопределения ИРИ на основе пеленгаторов описано в работе [8]. Основываясь на изложенном подходе, предлагаемый способ выполняет построение целевой функции относительно вектора оцениваемых параметров r, содержащего три координаты источника излучения, выражение которой в компактной форме может быть записано в виде:

где Re обозначает операцию нахождения действительной части комплексного числа, N - количество используемых ОП, Mn - количество точек приема (антенных элементов) в каждом ОП (может быть как одинаковое, так и различное число ТП),




где с - скорость света, rn - радиус-вектор центра n-го ОП, а rnm - радиус вектор m-й точки приема, входящий в состав n-го ОП.
Входящие в формулу (1) выражения


где



Комплексные спектры


где Тн - время наблюдения; ν - номер частотного канала; L - число отсчетов сигнала, рассчитываемое как целая часть отношения


Затем осуществляется поиск максимума (по аргументу r) целевой функции (3) с использованием известных методов [9], таких как метод наискорейшего спуска первого порядка или метод Ньютона второго порядка. Доставляющий максимум целевой функции вектор rmax полагается решением задачи определения местоположения. Такой способ оценки является одноэтапным, т.е. он исключает вычисление промежуточных оценок для времен задержек и углов пеленга, что позволяет уменьшить вероятности появления аномальных ошибок, которые могут возникнуть в многоэтапных методах [10] при отношениях сигнал-шум менее 15 дБ.
Основное отличие предлагаемого способа на основе одноэтапного пеленгатора от многоэтапных пеленгаторов (два и более этапов оценивания) состоит в формировании оценки, заведомо удовлетворяющей всем попарным фазовым задержкам в смысле лучшего (в среднеквадратичном смысле) приближения. Для пояснения отличия одноэтапного метода от двухэтапного служит графическая схема, построенная для двумерного пеленгационного оценивателя, основанного на разностно-дальномерном принципе. Выполнение двухэтапного оценивания, проиллюстрированного фиг. 3, выполняется так: на первом этапе измеряется вектор взаимных задержек между N станциями приема

Сформированная оценка местоположения передается на пункт, оснащенный передатчиком адресно-ответной радиолинии (ПрдАОРЛ), который может представлять собой как отдельно размещаемую передающую станцию, так и быть включен в состав радиотехнического комплекса приемного пункта, оснащенного ОП. В последнем случае передатчик и пеленгатор могут совместно использовать одну и ту же антенную систему путем ее коммутации на прием/передачу.
Выбор декаметрового (ДКМВ) диапазона работы радиолинии обусловлен преимуществами, которые обеспечивает данный диапазон при связи с удаленными абонентами за счет отражения радиоволн от ионосферы. Радиолиния в ДКМВ диапазоне обеспечивает возможность передачи на большие расстояния посредством сравнительно малых мощностей (до 2 кВт), обуславливает использование антенн, размещаемых на невысоких (до 20 м) мачтах, а также позволяет обеспечить направленную передачу данных [12].
Для каждого ЛА, местоположение которого было оценено с использованием одноэтапного пеленгатора, формируется диаграмма направленности антенной решетки, используемой ПрдАОРЛ, в направлении на ЛА по отношению к передающему пункту. В состав сообщения, передаваемого на борт ЛА, может быть включена информация о векторе координат ЛА в трехмерном пространстве, информация о точности полученных оценок, информация о пеленгах на опорные точки местности, время измерения и другая служебная информация. Информационный пакет может быть зашифрован с использованием симметричных или асимметричных алгоритмов шифрования для предотвращения доступа к информации сторонних получателей.
Общая схема предлагаемого способа навигации представлена на фиг. 5. На первом этапе (51) происходит излучение радиосигнала с борта ЛА, который попадает в антенные системы N одноэтапных пеленгаторов, обработка в которых включает в себя непосредственно (52) прием сигнала, состоящий в формировании цифровой последовательности отсчетов по сигналу в каждой точке приема. Обработка (53) принятых сигналов состоит в формировании нормализованных спектров согласно выражению (5), которые затем передаются (54) в ЦПО (5), где происходит формирование оценок местоположения ЛА (55) на основе минимизации функции, заданной выражением (3). Найденная оценка местоположения ЛА вместе с информацией для формирования диаграммы направленности передается (56) в пункт, где расположен передатчик ответно-адресной радиолинии. Сформированное сообщение передается (57) пакетом цифровой информации посредством радиолинии в ДКМВ диапазоне. Принятая информация о координатах используется (58) на борту ЛА пилотом и/или системами управления для корректировки курса воздушного судна.
Источники информации
1. Roger R.M. Applied mathematics in integrated navigation systems. AIAA, 2007.
2. Сетевые спутниковые радионавигационные системы / Шебшаевич B.C., Дмитриев П.П., Иванцевич Н.В. и др. Под ред. B.C. Шебшаевича. 2-е изд. М.: Радио и связь, 1993. 408 с.
3. Авиационная радионавигация. Справочник под ред. Сосновского Α.Α., M.: Транспорт, 1990.
4. Пат. 2558699 Комплексный способ навигации летательных аппаратов / Бабуров В.И., Гальперин Т.Б., Герчиков А.Г., Орлов В.К., Саута О.И., Соколов А.И., Юрченко Ю.С.; патентообладатель: ЗАО "ВНИИРА-Навигатор" - 2014120782/28; заявл. 22.05.2014; опубл. 10.08.2015, бюл. 22. - 31 с.
5. Пат. 2338158 Способ навигации летательных аппаратов / Хрусталев А.А., Кольцов Ю.В., Егоров C.H.; патентообладатель: ФГУП ФНПЦ "НИИ измерительных систем им. Ю.Е. Седакова" - 2007118460/28; заявл. 17.05.2007; опубл. 10.11.2008, бюл. 31. - 13 с.
6. Пат. 2567850 Способ пеленгования воздушного объекта / Уфаев В.А.; патентообладатели: РФ (МО РФ), ФГКВОУ ВПО "ВУНЦ ВВС "Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина" - 2014125677/07; заявл. 24.06.2014; опубл. 10.11.2015, бюл. 31. - 13 с.
7. Knapp C.H., Carter G.C., The Generalized Correlation Method for Estimation of Time Delay // IEEE Transactions on Acoustic, Speech and Signal Processing, 1976, vol. 24, no. 4, pp. 320-327.
8. Дубровин A.B., Сосулин Ю.Г. Одноэтапное оценивание местоположения источника радиоизлучения пассивной системой, состоящей из узкобазовых подсистем // Радиотехника и электроника, 2004, т. 49, №2, с. 156-170.
9. Nocedal J., Numerical Optimization, 2nd ed., Springer, 664 pp.
10. Черняк B.C. Многопозиционная радиолокация. - M.: Радио и связь, 1993. - 416 с.
11. Torrieri D.J., Statistical Theory of Passive Location Systems // IEEE Transactions on Aerospace and Electronic Systems, 1984, vol. 20, no. 2, pp. 183-198.
12. Никольский В., Никольская Т. Электродинамика и распространение радиоволн - М.: Либроком, 2014. - 544 с.
Реферат
Изобретение относится к области навигации летательных аппаратов с использованием пассивного радиолокационного способа определения местоположения объекта, являющегося источником электромагнитных излучений, и предназначено для построения автономных и комплексных систем навигации летательных аппаратов. Достигаемый технический результат - повышение точности оценки местоположения летательного аппарата за счет применения высокоточного одноэтапного пеленгатора, повышение быстродействия навигационного обеспечения за счет использования адресно-ответной пакетной цифровой радиолинии и снижение требований к бортовым вычислительным комплексам за счет выполнения основных вычислений в наземной аппаратуре. Высокоточный одноэтапный пеленгатор представляет собой программно-аппаратный комплекс, оснащенный активной фазированной антенной решеткой, который осуществляет прием радиосигналов, их синхронную демодуляцию многоканальным квадратурным приемником, преобразование в цифровую форму с использованием многоканального аналого-цифрового преобразователя и последующую цифровую обработку сигналов, направленную на формирование угла пеленга с использованием оптимального одноэтапного метода оценивания параметров. Одноэтапный метод оценивания состоит в формировании решающей функции на основе условной плотности по методу максимального правдоподобия и ее последующей оптимизации; данный метод исключает выполнение промежуточных этапов, на которых производится последовательное оценивание временных и фазовых задержек. 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство, способствующее наземной навигации летательного аппарата в аэропорту
Комментарии