Электронная система для защиты летательного аппарата от выхода за границы области допустимых режимов полета (варианты) и летательный аппарат (варианты) - RU2752153C2
Код документа: RU2752153C2
Чертежи


Описание
Ссылки на родственные заявки
Настоящая заявка претендует на приоритет патентной заявки US №15/470776, поданной 27 марта 2017 г., содержание которой полностью включено в настоящее раскрытие посредством ссылки.
Область техники
Настоящее изобретение относится, в основном, к авиационным системам защиты от выхода за границы области допустимых режимов полета и, в частности, к авиационным системам защиты от выхода за границы области допустимых режимов полета, моделирующим возможные траектории полета воздушных летательных аппаратов и тестирующих эти траектории на нарушение допустимых режимов летательного аппарата.
Уровень техники
Воздушные летательные аппараты (далее - летательные аппараты) проектируются для работы в пределах определенных скоростей полета и нагрузок на рулевые поверхности летательного аппарата. Эти эксплуатационные ограничения представляют собой границы области допустимых режимов полета, выход за которые грозит разрушением летательного аппарата или потерей управления. Для защиты от выхода за пределы области допустимых режимов полета, в обычных летательных аппаратах используется ряд разрозненных систем, которые оценивают отдельные стороны функционирования летательного аппарата для определения, не эксплуатируется ли летательный аппарат за пределами области допустимых режимов полета, или возможности его столкновения с местностью на данной траектории полета. Эти существующие системы обладают, однако, ограничениями, не позволяющими обеспечить полную защиту от выхода за границы области допустимых режимов полета.
Кроме того, эти обычные системы зачастую отключаются для посадки при выпуске шасси или по команде пилота. Отключение этих систем при посадке, между тем, лишает летательный аппарат защиты от выхода за границы области допустимых режимов во время посадки.
Соответственно, требуется создать системы и летательный аппарат, в которых обеспечивается более надежная защита от выхода за границы области допустимых режимов в фазах полета и посадки. Другие желательные признаки характеристики настоящего изобретения будут более понятны при ознакомлении с приведенным далее подробным описанием и прилагаемой формулой, при их рассмотрении совместно с прилагаемыми чертежами, а также вышеприведенными разделами "Область техники" и "Уровень техники".
Раскрытие изобретения
Предложены системы и летательный аппарат для защиты от выхода за границы области допустимых режимов полета. В раскрытом варианте выполнения авиационная электронная система включает, помимо прочего, модуль выбора траектории, выполненный с возможностью выбора возможной (потенциальной) траектории движения летательного аппарата с учетом текущего режима полета летательного аппарата; модуль режима полета на траектории, выполненный с возможностью оценивания смоделированного режима полета летательного аппарата по возможной траектории движения летательного аппарата; модуль сравнения с допустимыми режимами, выполненный с возможностью определения, не выходит ли смоделированный режим полета за пределы ограничений по допустимым режимам летательного аппарата; и модуль индикации нарушения допустимых режимов, выполненный с возможностью генерирования индикации угрозы нарушений.
В другом раскрытом варианте выполнения, летательный аппарат включает, помимо прочего, систему датчиков, выполненную с возможностью выдачи данных режима полета летательного аппарата, систему исполнительных механизмов, выполненную с возможностью управления рулевыми поверхностями летательного аппарата, и систему управления. Система управления включает: модуль выбора траектории, выполненный с возможностью выбора возможной траектории движения летательного аппарата с учетом текущего режима полета летательного аппарата; модуль режима полета на траектории, выполненный с возможностью оценивания смоделированного режима полета летательного аппарата по возможной траектории движения летательного аппарата; модуль сравнения с допустимыми режимами, выполненный с возможностью определения, не выходит ли смоделированный режим полета за пределы ограничений по допустимому режиму летательного аппарата; и модуль индикации нарушения допустимых режимов, выполненный с возможностью генерирования индикации угрозы нарушений.
Краткое описание чертежей
Преимущества настоящего изобретение станут более понятны при ознакомлении с приведенным ниже подробным описанием, рассмотренным применительно к приложенным чертежам, на которых:
на фиг. 1 представлен схематичный эскиз, иллюстрирующий летательный аппарат с системой управления, согласно различным вариантам выполнения; и
на фиг. 2 представлена блок-схема потоков данных, иллюстрирующая систему управления летательного аппарата, показанного на фиг. 1, согласно различным вариантам выполнения.
Подробное описание осуществления изобретения
Приведенное далее подробное описание носит иллюстративный характер и не предполагает ограничения заявки и использования изобретения. Более того, не предполагается какой-либо связи с любой известной или предполагаемой теорией, имеющейся в существующей технике, известных сведениях, кратких описаниях или приведенном далее подробном описании. В настоящем раскрытии, термином "модуль" обозначаются любые аппаратные средства, программное обеспечение, аппаратно-программное обеспечение, компоненты электронного управления, алгоритмы обработки, и/или процессорное устройство, отдельно или в любых комбинациях, включающее, без ограничений: специализированную интегральную схему (ASIC - от англ. application specific integration circuit), электронную схему, процессор (коллективного пользования, специализированный, или групповой) и память, выполняющее одну или более программ программного или аппаратно-программного обеспечения, комбинационная логическая схема и/или другой подходящий компонент, обеспечивающие выполнение требуемых функций.
Варианты выполнения настоящего раскрытия могут быть здесь описаны в категориях функциональных и/или логических компонентов блок-схем или различных шагов обработки. Следует иметь в виду, что эти элементы блок-схем могут быть реализованы любым числом компонентов аппаратных средств, программного обеспечения и/или аппаратно-программного обеспечения, сконфигурированных для выполнения конкретных функций. Например, в варианте выполнения настоящего изобретения могут использоваться различные компоненты интегральных схем, например, элементы памяти, элементы цифровой обработки сигнала, логические элементы, таблицы соответствия и тому подобное, которые выполняют различные функции под управлением одного или более микропроцессоров или других управляющих устройств. Кроме того, специалистам должно быть понятно, что варианты выполнения настоящего изобретения могут быть реализованы в сочетании с любым числом систем, и что описанные здесь системы являются просто частными вариантами выполнения настоящего изобретения.
Для простоты изложения, обычные технические средства и методы, относящиеся к обработке сигналов, передаче данных, передаче сигналов, управлению и другим функциональным особенностям систем (и отдельных функциональных компонентов систем), здесь могут подробно не описываться. Кроме того, соединительные линии, показанные на приведенных фигурах, предназначены для представления примеров функциональных связей и/или физических соединений между различными элементами. Следует заметить, что в варианте выполнения настоящего изобретения могут использоваться многие альтернативные или дополнительные функциональные связи или физические соединения.
Раскрытые здесь различные варианты выполнения описывают системы, которые реализуют Алгоритм Расчета Траектории (ТРА - от англ. Trajectory Prediction Algorithm) и Автопилот Восстановления нормального режима полета. ТРА моделирует различные возможные траектории восстановления нормального режима полета и проверяет эти траектории на ограничения по допустимым режимам летательного аппарата и минимальной высоте пролета над местностью. Траекториями восстановления нормального режима полета являются траектории полета, которые потенциально уведут летательный аппарат от грозящего нарушения допустимых режимов летательного аппарата или возможного столкновения с местностью. Если траектория полета нарушает допустимые режимы, она будет исключена, и не будет использоваться. Если возможен только один вариант восстановления нормального режима полета и при этом имеет место приближение к предельному режиму, ТРА активизирует автопилот восстановления нормального режима полета для инициирования этого варианта восстановления, чтобы тем самым предотвратить угрозу выхода за границы области допустимых режимов или возможного столкновения с местностью. Для предотвращения ложных предупреждений используются многие траектории. Например, если для предупреждения возможного столкновения с местностью мог бы быть использован правый поворот, но система не моделирует правые повороты, она запустит восстановление нормального режима, когда прямолинейная траектория движения пересекает местность. Если же экипаж без всякого риска планировал выполнение этого правого поворота, то ненужная активизация системы при наличии безопасной трассы полета создала бы помеху. ТРА моделирует восстановление нормального режима полета, исходя из текущего состояния летательного аппарата, используя его текущие рабочие характеристики. Например, ТРА использует моделирование мощности на основе окружающей температуры и состояния отказа двигателя. Автопилот восстановления нормального режима принимает на себя управление летательным аппаратом и выполняет, при его активизации, предписанное восстановление нормального режима.
На фиг. 1 представлен пример летательного аппарата 100 в соответствии с некоторыми вариантами выполнения. Летательный аппарат 100 включает, помимо других систем, систему 110 управления, систему 112 датчиков и систему 114 исполнительных механизмов. Хотя в данном описании летательный аппарат 100 представлен в виде самолета, следует понимать, что система 110 управления может быть использована в других летательных аппаратах, наземных транспортных средствах, водных транспортных средствах, космических аппаратах, или других механизмах, не выходя за пределы области притязаний настоящего раскрытия. Например, система 110 управления может быть использована в подводных лодках, вертолетах, дирижаблях, космических кораблях или автомобилях.
Системой 110 управления является авиационная электронная система, выполненная с возможностью управления летательным аппаратом 100 и оценки различных траекторий 120a-f, как это будет более подробно описано ниже. Система 112 датчиков включает одно или более чувствительных устройств, воспринимающих наблюдаемые условия окружающей среды, среды внутри летательного аппарата 100, или рабочие характеристики и состояние летательного аппарата 100. Например, система 112 датчиков может включать акселерометры, гироскопы, радиолокаторы, оптические локаторы, систему глобального позиционирования, оптические камеры, тепловизионные камеры, ультразвуковые датчики и/или другие датчики.
Система 114 исполнительных механизмов включает один или более приводов, которые управляют одним или более устройствами транспортного средства. Например, система 114 исполнительных механизмов может включать приводы, которые перемещают рулевые поверхности летательного аппарата 100, выпускают или убирают шасси летательного аппарата 100 и/или перемещают другие компоненты летательного аппарата 100.
Вместе с фиг. 1 рассмотрим далее фиг. 2, на которой изображена система 110 управления, в соответствии с некоторыми вариантами выполнения. Система 110 управления включает по меньшей мере один процессор и машиночитаемое запоминающее устройство или среду. Процессором может быть любой специализированный или серийно выпускаемый процессор, центральный процессор (ЦП), графический процессор (ГП), внешний процессор из числа нескольких процессоров, ассоциированных с системой 110 управления, микропроцессор на полупроводниковой основе (в виде микрочипа или набора микросхем), макропроцессор, любая их комбинация, или вообще любое устройство для выполнения команд. Машиночитаемое запоминаемое устройство (ЗУ) или среда могут включать, например, энергозависимое ЗУ и энергонезависимое ЗУ в постоянном запоминающем устройстве (ПЗУ), оперативное запоминающее устройство (ОЗУ) и энергонезависимую память (КАМ - от англ. keep alive memory). Машиночитаемое ЗУ или среда могут быть реализованы с использованием любого из многочисленных запоминающих устройств, например, ППЗУ (программируемое ПЗУ), ЭППЗУ (электрически программируемое ПЗУ), ЭСППЗУ (электрически стираемое программируемое ПЗУ), флэш-память, или любые другие электрические, магнитные, оптические или комбинированные запоминающие устройства, способные сохранять данные, некоторые из которых представляют собой исполняемые программы, используемые системой 110 управления для управления летательным аппаратом 100.
Команды могут включать одну или более отдельных команд, каждая из которых содержит упорядоченный список исполняемых инструкций для реализации логических функций. Инструкции, при их выполнении процессором, принимают и обрабатывают сигналы от системы датчиков, выполняют логические операции, вычисления, методы и/или алгоритмы для автоматического управления компонентами летательного аппарата 100 и генерируют сигналы управления для системы 114 исполнительных механизмов для автоматического управления компонентами летательного аппарата 100 на основе логических операций, расчетов, методов и/или алгоритмов. Хотя на фиг. 1-2 показана только одна система 110 управления, варианты выполнения летательного аппарата 100 могут включать любое число систем 110 управления, которые осуществляют связь посредством любой подходящей среды связи или комбинации сред связи и которые взаимодействуют для обработки сигналов датчиков, выполнения логических операций, вычислений, методов и/или алгоритмов, и генерировать сигналы управления для автоматического управления устройствами летательного аппарата 100. В различных вариантах выполнения одна или более команд системы управления, при их выполнении процессором, моделируют возможные восстановления нормального режима полета летательного аппарата и проверяют их на наличие пределов по числу Маха, пределов по индикаторной воздушной скорости, предельных углов атаки, и на возможность столкновения с местностью.
В представленном примере, система 110 управления включает систему 205 управления полетом, модуль 210 генерирования возможной траектории движения, модуль 215 выбора траектории, модуль 220 режима полета на траектории, базу 221 данных местности, базу 223 данных скороподъемности, базу 224 данных допустимых режимов летательного аппарата, модуль 225 сравнения с допустимыми режимами, модуль 230 индикации нарушения допустимых режимов, и модуль 235 автопилота восстановления нормального режима полета.
Система 205 управления полетом (СУП 205) управляет полетным планом, как это должно быть понятно специалистам. В приведенном примере, СУП 205 генерирует индикатор 305 возможной посадки, когда полетный план/минимальная высота полета летательного аппарата 100 указывает на возможную посадку. Например, когда летательный аппарат 100 входит в зону аэропорта как точки своего маршрута в СУП 205, СУП 205 может генерировать индикатор 305 возможной посадки. Следует понимать, что для генерирования индикатора 305 возможной посадки могут быть использованы другие критерии и модули. Например, другие модули могут генерировать индикатор 305 возможной посадки, когда выпущены посадочные шасси, когда летательный аппарат 100 находится вблизи торца взлетно-посадочной полосы, или когда выполнены другие условия, которые предполагают, что экипаж может сделать попытку посадки летательного аппарата 100.
Модуль 210 генерирования возможной траектории движения выполнен с возможностью генерирования ряда траекторий 310, из которых модуль 215 выбора траектории выбирает возможную траекторию движения летательного аппарата с учетом текущего режима полета летательного аппарата. Каждая из возможных траекторий движения летательного аппарата соответствует потенциальной траектории восстановления нормального режима полета, по которой может двигаться летательный аппарат, когда другие возможные траектории полета становятся нежелательными.
В представленном примере, модуль 210 генерирования возможной траектории движения выполнен с возможностью генерирования ряда траекторий, охватывающих по меньшей мере шесть различных направлений для возможного аварийного восстановления нормального режима полета, например, траектории 120a-f. Например, траектории 310 могут включать движение прямо вперед, набор высоты по прямой, набор высоты влево, набор высоты вправо, снижение влево и снижение вправо. Как известно специалистам, опасность низкой скорости представляет наибольший риск в положении с поднятым носом, а слишком высокая скорость наиболее рискованна в положении с опущенным носом, поэтому для полной защиты от выхода за границы допустимых режимов полета моделируются восстановления нормального режима из положения с поднятым носом и положения с опущенным носом. Следует понимать, что в пределах области притязаний настоящего изобретении могут быть использованы дополнительные или альтернативные траектории.
В приведенном примере, модуль 210 генерирования возможной траектории движения генерирует траектории, как с левым, так и с правым креном, соблюдая баланс между углом крена и степенью опасности положения с поднятым носом, что должно быть понятно специалисту. В ситуации с опущенным носом, устранение крена летательного аппарата помогает восстановлению нормального режима полета, но в ситуации с поднятым носом восстановлению нормального режима помогает усиление крена. Упомянутый баланс зависит от того, что делает пилот. Например, если нос летательного аппарата поднят несильно, наиболее целесообразно для восстановления нормального режима вообще не использовать крен. Большинство пилотов в ситуации с поднятым носом будут выбирать величину крена в зависимости от остроты необходимости восстановления нормального режима с тем, чтобы завершение восстановления было плавным. Модуль 210 генерирования возможной траектории движения находит оптимальный угол крена, исходя из наиболее плавного восстановления нормального режима, не создавая конфликта между случаями с опущенным и поднятым носом.
Модуль 210 генерирования возможной траектории движения также выполнен с возможностью генерирования траектории посадки из множества траекторий в ответ на индикацию возможной посадки. Учитывая также и траекторию посадки, система 110 управления может продолжать функционировать, как это описано ниже, даже во время посадки, не отключая оценку траектории. Система 110 управления остается активной вплоть до ВПП, используя "блокирование безопасной посадки". По мере приближения летательного аппарата к началу ВПП, система будет заблокирована от осуществления руководства восстановлением нормального режима полета из-за угрозы столкновения с местностью, при индикации безопасной посадки. Другими словами, пока траектория посадки не нарушает допустимых режимов, траектория посадки доступна для пилота. Это блокирование усиливает возможности обычных систем защиты от выкатывания за пределы ВПП в определении безопасного захода на ВПП. Небезопасные заходы не будут блокироваться и полная защита будет сохранена.
Модуль 215 выбора траектории выполнен с возможностью выбора возможной траектории 315 летательного аппарата из траекторий 310 для ее оценки модулем (220) режима полета на траектории. В приведенном примере, модуль 215 выбора траектории по очереди оценивает каждую возможную траекторию полета летательного аппарата из траекторий 310, и обеспечивает, на основе выполненной оценки предыдущей возможной траектории, выбор следующей подряд траектории из ряда траекторий в качестве возможного пути движения летательного аппарата. Модуль 215 выбора траектории выбирает каждую возможную траекторию из траекторий 310 для полной оценки каждой возможной траектории, по которой может двигаться летательный аппарат 100.
Модуль 220 режима полета на траектории выполнен с возможностью оценки смоделированного режима 317 полета летательного аппарата по возможной траектории движения. Смоделированный режим полета может показывать воздушную скорость, тангаж, крен, рысканье и другие показатели режима полета, которые могут быть использованы для определения, не нарушает ли летательный аппарат 100 допустимые режимы. В приведенном примере, модуль 220 режима полета на траектории включает модуль 240 вертикальной скорости, модуль 245 энергетического состояния, модуль 250 расчета воздушной скорости, и модуль 255 возможности столкновения с местностью. Модуль 220 режима полета на траектории получает данные 316 датчиков от системы 112 датчиков.
Модуль 240 вертикальной скорости выполнен с возможностью вычисления вертикальной скорости летательного аппарата на возможной траектории движения летательного аппарата. Например, модуль 240 вертикальной скорости может вычислять вертикальную скорость на основе вектора скорости и угла снижения, данные о которых поступают от системы 112 датчиков.
Модуль 245 энергетического состояния выполнен с возможностью вычисления энергетического состояния летательного аппарата на возможной траектории движения летательного аппарата. Энергетическое моделирование обеспечивает точное вычисление числа Маха, воздушной скорости и угла атаки на возможной траектории движения летательного аппарата. Процессор может оценить большое число траекторий быстрее, чем в реальном времени, поэтому энергетическое моделирование выполняется с использованием простого, точного и быстрого алгоритма.
Модуль 245 энергетического состояния также позволяет вычислить энергетическое состояние на основе скороподъемности летательного аппарата при полной мощности и скорости снижения летательного аппарата на режиме малого газа. В частности, модуль 245 энергетического состояния использует интерполяцию между двумя параметрами. Первым параметром является скороподъемность при полной мощности, а вторым параметром является скорость снижения на режиме малого газа. Эти два параметра определяют полный интервал приращения/потери мощности летательного аппарата. Эти параметры вычисляются с использованием табличных данных или упрощенного моделирования, основанного на текущей конфигурации и режиме полета.
Модуль 245 энергетического состояния также позволяет вычислять энергетическое состояние на основе установленного текущего режима работы двигателя летательного аппарата, текущей допустимой мощности двигателя летательного аппарата, положения аэродинамического тормоза на летательном аппарате, положения посадочного шасси и закрылков летательного аппарата, и рабочего состояния двигателя летательного аппарата. Например, модуль 245 энергетического состояния может прогнозировать будущее энергетическое состояние летательного состояния 100 путем интерполирования между максимальной скороподъемностью и скоростью снижения на режиме малого газа при определенных температурах или других условиях и с учетом конфигурации летательного аппарата. Эта способность прогнозировать энергетические состояния обеспечивает точный переход между восстановлением нормального режима полета из положения с поднятым или опущенным носом и завершающим участком установившегося набора высоты. Используя максимальную скороподъемность и скорость снижения на режиме малого газа, используя по меньшей мере отчасти статус отказа двигателя, система 110 управления вырабатывает точный прогноз о работе всех двигателей или возможном возникновении отказа двигателя. Поскольку переход между восстановлением нормального режима полета из положения с поднятым или опущенным носом и завершающим участком установившегося набора высоты определяется энергетическим состоянием, система 110 управления может точно смоделировать восстановление нормального режима полета в положение с поднятым носом, даже если нос опущен. Например, если выполняется горизонтальный полет выше потолка полета на одном двигателе и происходит отказ двигателя вблизи допустимого режима летательного аппарата, система 110 прогнозирует и осуществит восстановление нормального режима с поднятым носом, даже если нос горизонтален или опущен. Это происходит потому, что при горизонтальном полете выше потолка полета с одним двигателем, летательный аппарат испытывает недостаток мощности и должен снижаться выровненным, чтобы избежать возможного столкновения с местностью. В некоторых вариантах выполнения, система использует плоскость постоянной энергии и постоянную высоту для различения между необычными положениями с поднятым носом и необычным положением с опущенным носом. Соответственно, система 110 управления может надежно обойти наземные препятствия, превышающие потолок летательного аппарата на одном двигателе, когда летательный аппарат выполняет маневр снижения на одном двигателе, что должно быть понятно специалистам.
Модуль 250 расчета воздушной скорости выполнен с возможностью оценивания воздушной скорости летательного аппарата на возможной траектории полета летательного аппарата на основе вертикальной скорости и энергетического состояния. Например, модуль 250 расчета воздушной скорости может определить различие между скороподъемностью и вертикальной скоростью, и затем использовать положение дроссельной заслонки для вычисления изменения воздушной скорости.
В некоторых вариантах выполнения, каждая траектория оценивается циклическим использованием следующего алгоритма:
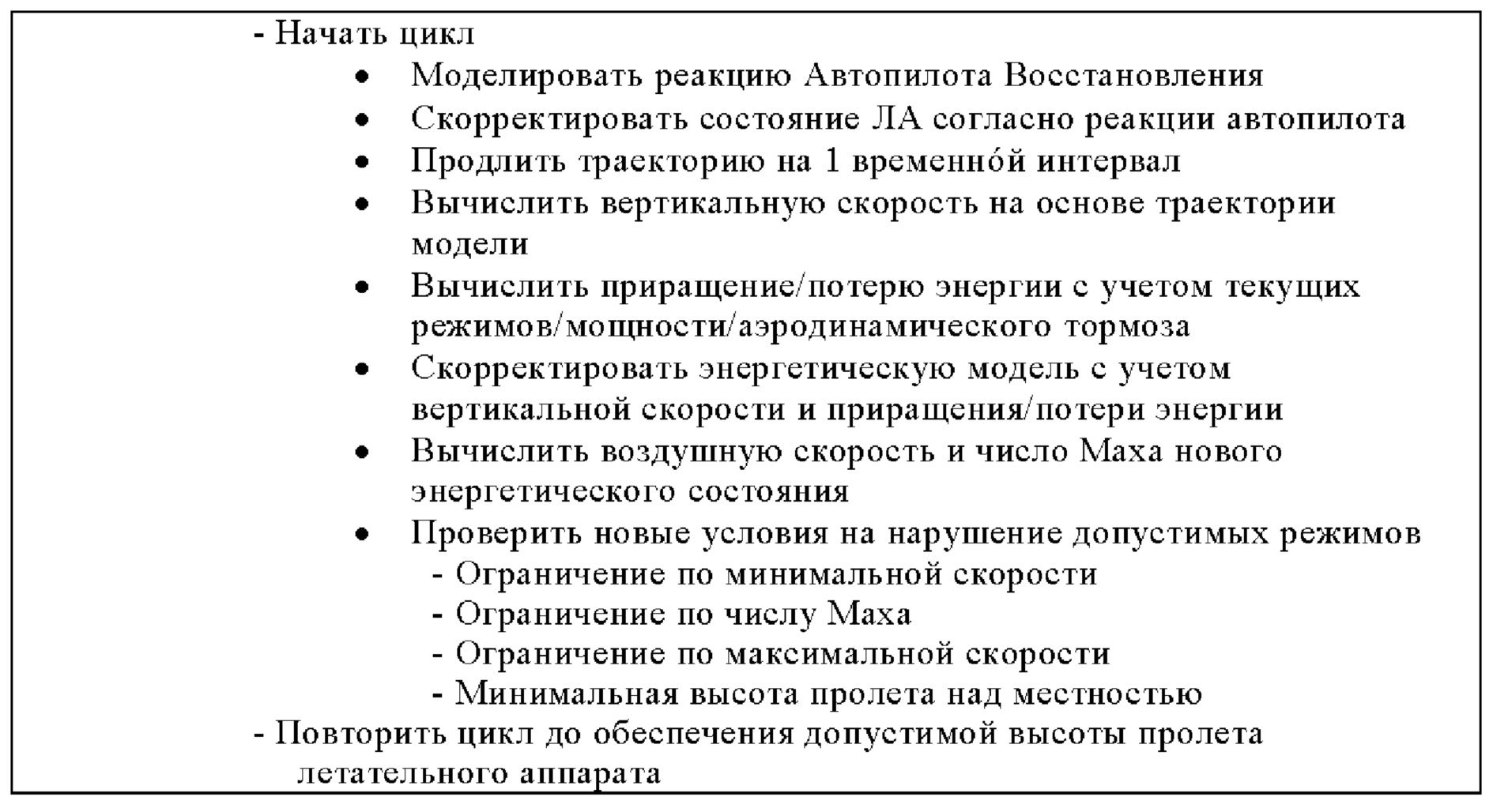
В базе 221 данных местности хранятся данные 320 местности для их использования модулем 255 возможности столкновения с местностью. Например, база 221 данных может использовать обычные имеющиеся на рынке данные местности, показывающие высоту и расположение рельефа. Модуль 255 возможности столкновения с местностью выполнен с возможностью определения, указывает ли возможная траектория движения летательного аппарата на возможность столкновения с местностью.
База 223 данных скороподъемности хранит данные 325 скороподъемности. В приведенном примере, база 325 данных скороподъемности содержит данные скороподъемности при полной мощности и скорости снижения на режиме малого газа летательного аппарата 100 в определенных условиях, например, при конкретных температурах и высотах.
База 224 данных допустимых режимов летательного аппарата хранит данные 330 допустимых режимов летательного аппарата. В настоящем раскрытии, термин "допустимые режимы летательного аппарата" означает предельные режимы полета, например, число Маха, предельные воздушные скорости, предельные углы атаки и другие аналогичные предельные параметры летательного аппарата. В данном раскрытии, термин "допустимые режимы летательного аппарата", в частности, не охватывает ситуации возможного столкновения с местностью.
В представленном примере, допустимыми режимами летательного аппарата являются установленные ограничения по комфорту пассажиров. Например, эти ограничения являются достаточно жесткими, чтобы, не причиняя особенных неудобств, тем не менее, обеспечивать защиту, предотвращая травмы непристегнутых пассажиров. Восстановление нормального режима полета опирается на маневрирование в пределах режимов автопилота, с ограничением скорости увеличения крена и ограниченными перегрузками, для предотвращения больших поперечных и вертикальных ускорений в салоне. Использование крена при восстановлении нормального режима полета помогает свести к минимуму неудобства для пассажиров, не подвергая их дополнительным ускорениям.
В некоторых вариантах выполнения, допустимыми режимами летательного аппарата являются предельные технические характеристики летательного аппарата. Например, предельные технические характеристики летательного аппарата допускают большие ускорения и перегрузки, чем разрешено ограничениями по комфорту пассажиров.
Модуль 225 сравнения с допустимыми режимами выполнен с возможностью определения, не нарушают ли смоделированный режим полета допустимые режимы летательного аппарата. Например, если индикация воздушной скорости летательного аппарата 100 на возможной траектории движения показывает превышение максимальной воздушной скорости допустимого режима летательного аппарата, то модуль 225 сравнения с допустимыми режимами определит, что смоделированный режим полета нарушает допустимые режима летательного аппарата.
Модуль 230 индикации нарушения допустимых режимов выполнен с возможностью генерирования индикации угрозы нарушений 335, на основе сравнений с допустимым режимом. В представленном примере, модуль 230 индикации нарушения допустимых режимов также обеспечивает генерирование индикации угрозы нарушений, обусловленных возможностью столкновения с местностью. В некоторых вариантах выполнения, индикация угрозы нарушений 335 может передаваться экипажу визуальным отображением на дисплее в кабине экипажа летательного аппарата 100.
Модуль 235 автопилота восстановления нормального режима полета выполнен с возможностью ведения летательного аппарата по выбранной траектории, в соответствии с выбором этой траектории в качестве последней траектории из ряда траекторий, для которой индикация не указывает на нарушение режимов. Например, если пять из шести смоделированных траекторий сопровождаются индикацией нарушения допустимого режима, модуль 235 автопилота восстановления нормального режима даст команду летательному аппарату 100 лететь по оставшейся смоделированной траектории, когда эта траектория дает индикацию угрозы нарушения режима. Для управления полетом, модуль 235 автопилота восстановления нормального режима полета может направить команды 340 управления в систему 114 исполнительных механизмов для управления рулевыми поверхностями летательного аппарата 100.
Как должно быть понятно специалистам, если летательный аппарат подвергается сильному возмущению от сдвига ветра или других факторов, в результате чего он оказывается в почти перевернутом положении с экстремальными углами крена, система 110 управления позволяет определить, посредством генерирования возможных траекторий движения для каждого направления, в какую сторону необходимо изменить крен для восстановления нормального режима полета. Например, при правом крене в почти перевернутом положении и еще увеличивающимся правым креном, система 110 управления будет оценивать возможную траекторию движения с дальнейшим вращением через перевернутое положение до горизонтального положения крыльев. Затем система 110 управления начинает восстановление режима полета с опущенным носом, останавливая вращение и инициируя вращение в более коротком направлении для начала восстановления нормального режима полета. Давая команду на использование выбранной траектории, система 110 управления гарантирует, что оцененная траектория является траекторией, по которой летел летательный аппарат 100. Например, когда траектория восстановления нормального режима полета прогнозирует восстановление с вращением по крену, автопилот восстановления нормального режима полета осуществляет восстановление креном с переворотом, нежели восстановление без крена с переворотом.
В представленном примере, модуль 235 автопилота восстановления нормального режима выполнен с возможностью управления летательным аппаратом с использованием следующего алгоритма:

Хотя в приведенном выше подробном описании был представлен по меньшей мере один частный вариант выполнения, следует понимать, что имеется большое число возможных вариантов. Также следует иметь в виду, что частный вариант или частные варианты представляют собой только примеры выполнения и ни в какой мере не предполагают ограничения области притязаний, применения или конструкции изобретения. Напротив, приведенное выше подробное описание является для специалистов удобным планом действий для реализации частного варианта выполнения или частных вариантов выполнения. Следует понимать, что в функционировании и организации элементов могут быть сделаны различные изменения в рамках области притязаний изобретения, в соответствии с приложенной формулой и ее законными эквивалентами.
Реферат
Группа изобретений относится к двум вариантам электронной системы для защиты от выхода за границы области допустимых режимов полета и двум вариантам летательного аппарата, содержащего такие системы. Электронная система по первому варианту содержит модуль выбора траектории, модуль режима полета на траектории, модуль сравнения с допустимыми режимами, модуль индикации нарушения допустимых режимов. Электронная система по второму варианту отличается от системы по первому варианту тем, что дополнительно содержит модуль генерирования возможной траектории движения. Летательный аппарат по каждому из вариантов содержит систему датчиков, систему исполнительных механизмов, систему управления, включающую электронные системы по первому и второму варианту соответственно. Обеспечивается повышение надежности защиты от выхода за границы области допустимых режимов в фазах полета и посадки. 4 н. и 18 з.п. ф-лы, 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ и система для содействия пилотированию воздушного судна, летящего на малой высоте
Комментарии