Бортовое оборудование для обнаружения стрельбы и содействия пилотированию - RU2717753C2
Код документа: RU2717753C2
Чертежи







Описание
Настоящее изобретение относится к комбинированному способу для содействия пилотированию и обнаружения стрельбы и к бортовому оборудованию для летательного аппарата, способному осуществлять упомянутый способ.
Известны летательные аппараты, например, вертолеты или самолеты, содержащие системы обнаружения стрельбы и системы содействия пилотированию. Системы обнаружения стрельбы позволяют обнаруживать, подвергается ли летательный аппарат стрельбе легкого вооружения или тяжелого вооружения или ракетного вооружения.
В статье ʺSniper Location Using Acoustic Asynchronous Sensorsʺ by Damarla T; Kaplan L M; Whipps, G.T., Sensors Journal, IEEE, vol. 10, no.9, pp. 1469, 1478, Sept. 2010) описан способ определение местоположения снайпера на основе акустических датчиков. Способ опирается на измерении различия между дульной вспышкой и шумом, именуемым ʺволной Махаʺ (также именуемой ʺударной волнойʺ или ʺударной волной Махаʺ или ʺбаллистической волнойʺ). Волна Маха («ударная волна» в англо-саксонской терминологии) соответствует сверхзвуковому удару, вызванному снарядом, имеющим сверхзвуковую скорость. Этот способ неприменим к летательному аппарату, например, вертолету, поскольку вертолет создает шум, маскирующий дульную вспышку. Кроме того, часто сообщалось о проблемах с неточностью положения для способов определения местоположения снайпера на основе акустических систем.
В статье ʺAn acoustic sniper location systemʺ by Gervasio Prado; Hardave Dhaliwal; Philip O. Martel; Proc. SPIE 2938, Command, Control, Communications, and Intelligence Systems for Law Enforcement, 318 (February 18, 1997) описана система определения местоположения снайпера также на основании обнаружения сверхзвуковых ударов и/или волн Маха с использованием акустических датчиков. В этой статье рассмотрены проблемы неточностью акустических систем и предлагается дополнение определения местоположения с использованием акустических датчиков определением местоположения с использованием инфракрасных датчиков. Один способ определения местоположения, используемый системой, состоит из определения местоположения области, откуда исходит стрельба с использованием акустических датчиков. Затем инфракрасный датчик нацеливается на область происхождения для точного определения местоположения источника стрельбы. Таким образом, этот способ требует двукратного определения местоположения, поскольку определение местоположения на основе акустических датчиков сопровождается определением местоположения на основе инфракрасного датчика. Таким образом, эта система обуславливает задержку, которая может оказывать негативное влияние, когда стрельба требует очень быстрой реакции оператора, солдата или пилота летательного аппарата.
Кроме того, летательный аппарат должен быть способен летать в различных климатических условиях и, в частности, в климатических условиях, не обеспечивающих хорошую видимость (ночь, дождь, снег, туман, задымление, запыленность и т.д.). Системы содействия пилотированию облегчают пилоту навигацию в сложных климатических условиях. Системы содействия пилотированию охватывают, в частности, системы ночного видения, системы обнаружения препятствия, и системы для обнаружения маяков и сигнальных огней.
Обнаружение стрельбы (вражеского или не вражеского) и содействие пилотированию являются двумя различными областями, базирующимися на разных экспертных знаниях, в результате чего, системы обнаружения стрельбы и системы содействия пилотированию в настоящее время развиваются независимо. Таким образом, летательный аппарат, в общем случае, снабжен двумя отдельными системами, причем первая система предназначена для обнаружения стрельбы, и вторая система предназначена для содействия пилотированию. Такое разделение приводит к многочисленным проблемам, например, проблемам места, занимаемого двумя системами, размещения двух систем на летательном аппарате и проблемам веса. Кроме того, отдельное развитие двух систем препятствует поиску возможных синергий, которые могут существовать между системой содействия пилотированию и системой обнаружения стрельбы.
Желательно преодолеть эти различные недостатки уровня техники.
В общем случае, желательно уменьшать объем и вес систем обнаружения стрельбы и содействия пилотированию с целью облегчения их установки на летательный аппарат. Желательно также пользоваться любыми возможными синергиями между системой обнаружения стрельбы и системой содействия пилотированию.
Согласно первому аспекту изобретения, изобретение относится к бортовому оборудованию обнаружения стрельбы и содействия пилотированию для летательного аппарата, содержащему: многодатчиковую систему, подающую сигналы, представляющие окружение летательного аппарата, содержащую: по меньшей мере одну систему, именуемую системой LWIR/MWIR, подающую сигнал, именуемый сигналом LWIR/MWIR, представляющий инфракрасное излучение, лежащее в дальнем инфракрасном или среднем инфракрасном диапазоне; по меньшей мере одну систему, именуемую системой NIR, подающую сигнал, именуемый сигналом NIR, представляющий инфракрасное излучение, лежащее в ближнем инфракрасном диапазоне; и по меньшей мере одному акустическую систему выдающую акустический сигнал; средства обработки, содержащее: средства содействия пилотированию, позволяющие получать первую информацию о пилотировании, содержащую информацию, представляющую препятствия, присутствующие в окружении летательного аппарата; и средства обнаружения стрельбы, позволяющие получать вторую информацию о пилотировании, содержащую информацию, представляющую стрельбу вблизи летательного аппарата, причем средства содействия пилотированию и средства обнаружения стрельбы используют сигналы, представляющие окружение летательного аппарата, содержащие по меньшей мере сигнал LWIR/MWIR; и средства получения для получения параметров содействия пилотированию из первой и второй информации о пилотировании; причем средства обнаружения стрельбы содержат: средства поиска для поиска особенностей в сигналах, представляющих окружение летательного аппарата, содержащие средства для поиска первой особенности в первом сигнале, включенном в сигналы, представляющие окружение летательного аппарата, и средства для поиска второй особенности в по меньшей мере втором сигнале, включенном в сигналы, представляющие окружение летательного аппарата; средства определения для определения, с использованием результата средств поиска, обнаружено ли событие, соответствующее искомому типу события; средство определения местоположения для определения географического местоположения источника обнаруженного события с использованием информации, предоставленной средствами содействия пилотированию; и средства получения для получения второй информации о пилотировании в зависимости от типа обнаруженного события и географического местоположения источника упомянутого события.
Таким образом, бортовое оборудование является оборудованием для обнаружения стрельбы и содействия пилотированию. Это бортовое оборудование пользуется синергией между обнаружением стрельбы и содействием пилотированию поскольку средства обнаружения стрельбы повторно используют информацию, полученную средствами содействия пилотированию для определения географического местоположения источника события. Кроме того, средства содействия пилотированию и средства обнаружения стрельбы используют сигнал, выдаваемый одной и той же системой, т.е. сигнал LWIR/MWIR, выдаваемый по меньшей мере одной системой LWIR/MWIR. Такое обобществление системы LWIR/MWIR обеспечивает уменьшение размера и веса бортового оборудования.
Согласно одному варианту осуществления, каждая система LWIR/MWIR содержит оптическое устройство, именуемое оптическим устройством LWIR/MWIR, и устройство захвата, именуемое устройством захвата LWIR/MWIR, подающее сигнал LWIR/MWIR в форме изображений, именуемых изображениями LWIR/MWIR, каждая система NIR содержит оптическое устройство, именуемое оптическим устройством NIR, и устройство захвата, именуемое устройством захвата NIR, подающее сигнал NIR в форме изображений, именуемых изображениями NIR, причем многодатчиковая система содержит системы LWIR/MWIR и системы NIR в количестве, зависящем от соответствующего разрешения получаемых изображений LWIR/MWIR и NIR.
Таким образом, можно обеспечить достаточные разрешения изображений LWIR/MWIR или NIR для содействия пилотированию и обнаружения стрельбы.
Согласно одному варианту осуществления, каждое устройство захвата LWIR/MWIR содержит болометрический датчик, способный захватывать сигнал LWIR/MWIR.
Болометрический датчик позволяет непрерывно захватывать сигнал LWIR/MWIR.
Согласно второму аспекту изобретения, изобретение относится к множеству единиц бортового оборудования согласно первому аспекту, позволяющих, комбинируя изображения LWIR/MWIR, получать изображение, представляющее панораму на 360°, именуемую панорамой LWIR/MWIR, вокруг летательного аппарата. Таким образом, пилот летательного аппарата будет получать информацию содействия пилотированию и информацию обнаружения стрельбы, поступающую со всех направлений из окружения летательного аппарата.
Согласно третьему аспекту изобретения, изобретение относится к комбинированному способу содействия пилотированию и обнаружения стрельбы, осуществляемому бортовым оборудованием, установленным на летательном аппарате. Способ содержит следующие этапы: получение сигналов, представляющих окружение летательного аппарата, содержащих: сигнал, именуемый сигналом LWIR/MWIR, представляющий инфракрасное излучение, лежащее в дальнем инфракрасном или среднем инфракрасном диапазоне, выдаваемый системой, именуемой системой LWIR/MWIR; сигнал, именуемый сигналом NIR, представляющий инфракрасное излучение, лежащее в ближнем инфракрасном диапазоне, выдаваемый системой, именуемой системой NIR; и акустический сигнал, выдаваемый акустической системой, осуществление процедуры содействия пилотированию и процедуры обнаружения стрельбы, причем процедура содействия пилотированию позволяет получать первую информацию о пилотировании, содержащую информацию, представляющую препятствия, присутствующие в окружении летательного аппарата, а процедура обнаружения стрельбы позволяет получать вторую информацию о пилотировании, содержащую информацию, представляющую стрельбу вблизи летательного аппарата, причем процедура содействия пилотированию и процедура обнаружения стрельбы используют сигналы, представляющие окружение летательного аппарата, содержащие по меньшей мере сигнал LWIR/MWIR; получение параметров содействия пилотированию из первой и второй информации о пилотировании; причем процедура обнаружения стрельбы содержит следующие этапы: поиск особенностей в сигналах, представляющих окружение летательного аппарата, причем поиск особенностей содержит поиск первой особенности в первом сигнале, включенном в сигналы, представляющие окружение летательного аппарата, и поиск второй особенности в по меньшей мере втором сигнале, включенном в сигналы, представляющие окружение летательного аппарата; когда результат поиска особенностей показывает что событие, соответствующее искомому типу события, произошло, определение географического местоположения источника упомянутого события с использованием информации, полученной при осуществлении процедуры содействия пилотированию; получение второй информации о пилотировании в зависимости от упомянутого типа и географического местоположения источника упомянутого события.
Таким образом, способ объединяет в себе функцию обнаружения стрельбы и функцию содействия пилотированию. Как и система согласно первому аспекту, способ пользуется синергией между процедурой обнаружения стрельбы и процедурой содействия пилотированию, поскольку процедура обнаружения стрельбы повторно использует информацию, выдаваемую процедурой содействия пилотированию для определения географического местоположения источника события. Кроме того, сигнал LWIR/MWIR, выдаваемый по меньшей мере одной системой LWIR/MWIR, используется процедурой содействия пилотированию и процедурой обнаружения стрельбы. Таким образом, процедура содействия пилотированию и процедура обнаружения стрельбы совместно используют одну и ту же систему LWIR/MWIR, что позволяет уменьшить объем и вес бортового оборудования.
Согласно одному варианту осуществления, система NIR выдает сигнал NIR в форме изображений, именуемых изображениями NIR, система LWIR/MWIR выдает сигнал LWIR/MWIR в форме изображений, именуемых изображениями LWIR/MWIR, и особенность присутствует в сигнале NIR при обнаружении вспышки света в по меньшей мере одном изображении NIR, особенность присутствует в сигнале LWIR/MWIR при обнаружении вспышки света в по меньшей мере одном изображении LWIR/MWIR, и особенность присутствует в акустическом сигнале при обнаружении волны Маха в акустическом сигнале.
Согласно одному варианту осуществления, когда поиск по меньшей мере одной особенности в сигналах, представляющих окружение летательного аппарата, позволяет обнаружить первую вспышку света в по меньшей мере одном изображении LWIR/MWIR и вторую вспышку света, коррелирующую в пространстве и во времени с первой вспышкой света, в по меньшей мере одном изображении NIR, событие идентифицируется как солнечный блик и не соответствует искомому событию.
Таким образом, событие, не представляющее никакого интереса для содействия пилотированию или обнаружения стрельбы, игнорируется.
Согласно одному варианту осуществления, когда поиск по меньшей мере одной особенности в сигналах, представляющих окружение летательного аппарата, позволяет обнаружить первую вспышку света в сигнале LWIR/MWIR, но при этом в сигнале NIR не обнаружилась ни одна вторая вспышка света, коррелирующей с первой вспышкой света, событие идентифицируется как выстрел и соответствует искомому событию.
Согласно одному варианту осуществления, когда, после идентификации события, соответствующего выстрелу, и определения географического местоположения источника упомянутого события, волна Маха, имеющая временную корреляцию с первой вспышкой света, обнаруживается в акустическом сигнале, событие идентифицируется как выстрел в направлении летательного аппарата, причем географическое местоположение источника упомянутого события используется для определения уровня временной корреляции между первой вспышкой света и волной Маха.
Таким образом, информация о географическом местоположении источника стрельбы, полученная с использованием информации, выдаваемой процедурой содействия пилотированию, позволяет определить, коррелирует ли во времени волна Маха с первой вспышкой света.
Согласно одному варианту осуществления, когда поиск по меньшей мере одной особенности в сигналах, представляющих окружение летательного аппарата, позволяет обнаружить вторую вспышку света в сигнале NIR, но не обнаружилась ни одна первая вспышка света, коррелирующая со второй вспышкой света в сигнале LWIR/MWIR, событие идентифицируется как обнаружение сигнального огня и соответствует искомому событию.
Таким образом, процедура обнаружения стрельбы также позволяет обнаружить сигнальные огни благодаря использованию системы NIR.
Согласно одному варианту осуществления, информация о длительности вспышки света связана с каждой вспышкой света, причем длительность вспышки света используется для уточненной идентификации типа события.
Таким образом, использование длительности вспышки света позволяет получить более надежную процедуру обнаружения стрельбы.
Согласно одному варианту осуществления, информация о частоте повторения вспышки света связана с каждым обнаружением вспышки света, причем частота повторения используется для уточненной идентификации типа события.
Таким образом, использование частоты повторения вспышки света позволяет получить лучшую классификацию вооружения, используемого для обнаруженной стрельбы.
Согласно одному варианту осуществления, когда идентифицированное событие соответствует выстрелу, полученные параметры содействия пилотированию содержат информацию, представляющую зону дальности стрельбы и/или направление выхода из зоны дальности стрельбы.
Согласно одному варианту осуществления, когда идентифицированное событие соответствует обнаружению сигнального огня, полученные параметры содействия пилотированию содержат информацию, представляющую зону для уклонения от сигнального огня и/или информацию, представляющую время уклонения, соответствующее оценке времени, необходимого летательному аппарату для достижения зоны для уклонения от сигнального огня, и/или направление уклонения от зоны для уклонения от сигнального огня.
Согласно одному варианту осуществления, способ осуществляется бортовым оборудованием согласно первому аспекту или каждой единицей бортового оборудования летательного аппарата согласно второму аспекту.
Согласно четвертому аспекту изобретения, изобретение относится к компьютерной программе, отличающейся тем, что содержит инструкции для осуществления, устройством, способа согласно третьему аспекту, при выполнении упомянутой программы процессором упомянутого устройства.
Согласно пятому аспекту, изобретение относится к средству хранения, отличающемуся тем, что на нем хранится компьютерная программа, содержащая инструкции для осуществления, устройством, способа согласно третьему аспекту, при выполнении упомянутой программы процессором упомянутого устройства.
Вышеупомянутые и другие признаки настоящего изобретения явствуют из нижеследующего описания иллюстративного варианта осуществления, причем упомянутое описание приведено в отношении прилагаемых чертежей, в которых:
- фиг. 1 схематически демонстрирует пример установки на летательном аппарате по меньшей мере одной единицы бортового оборудования обнаружения стрельбы и содействия пилотированию;
- фиг. 2 схематически демонстрирует первый пример бортового оборудования обнаружения стрельбы и содействия пилотированию согласно изобретению;
- фиг. 3 схематически демонстрирует систему, выдающую сигнал, представляющий инфракрасное излучение, включенное в длинноволновой инфракрасный (LWIR) диапазон или в средневолновой инфракрасный (MWIR) диапазон;
- фиг. 4 схематически демонстрирует систему, выдающую сигнал, представляющий инфракрасное излучение, включенное в ближний инфракрасный (NIR) диапазон;
- фиг. 5 схематически демонстрирует аппаратную архитектуру модуля обработки, способного осуществлять комбинированный способ содействия пилотированию и обнаружения стрельбы;
- фиг. 6A схематически демонстрирует пример комбинированного способа содействия пилотированию и обнаружения стрельбы;
- фиг. 6B схематически демонстрирует пример способа поиска по меньшей мере одной особенности в сигналах, представляющих окружение летательного аппарата;
- фиг. 6C схематически демонстрирует пример способа получения информация о пилотировании в зависимости от типа и географического местоположения источника обнаруженного события;
- фиг. 7 схематически демонстрирует второй пример бортового оборудования обнаружения стрельбы и содействия пилотированию согласно изобретению;
- фиг, 8 схематически демонстрирует третий пример бортового оборудования обнаружения стрельбы и содействия пилотированию согласно изобретению; и
- фиг. 9 схематически демонстрирует пример механической установки бортового оборудования обнаружения стрельбы и содействия пилотированию согласно изобретению.
В нижеследующем подробном описании приведены различные варианты осуществления настоящего изобретения применительно к вертолету. Однако принципы настоящего изобретения применимы в более широком контексте. Принципы настоящего изобретения фактически применимы к любому летательному аппарату, для которого полезны обнаружение стрельбы и содействие пилотированию, например, дирижаблю, самолету, планеру, воздушному шару, беспилотнику, реактивному снаряду, ракете и т.д.
Фиг. 1 схематически демонстрирует пример установки на летательном аппарате 10 по меньшей мере одной единицы бортового оборудования обнаружения стрельбы и содействия пилотированию. Каждое бортовое оборудование обнаружения стрельбы и содействия пилотированию предназначено для обнаружения различных типов стрельбы, например, обстрела из легкого стрелкового вооружения, артобстрела, обстрела из реактивного гранатомета и обстрела ракетами типа земля-воздух.
В этом примере, летательным аппаратом 10 является вертолет. Летательный аппарат 10 содержит две единицы бортового оборудования 11A и 11B обнаружения стрельбы и содействия пилотированию. Далее, для упрощения, каждое бортовое оборудование обнаружения стрельбы и содействия пилотированию будем считать бортовым оборудованием. В примере, приведенном на фиг. 1, единицы бортового оборудования распределены в передней и задней части летательного аппарата 10. Летательный аппарат, в общем случае, содержит несколько единиц бортового оборудования, позволяющих охватывать цилиндрическую панораму, соответствующую оптическому полю в угле 360° вокруг летательного аппарата. Кроме того, летательный аппарат 10 содержит устройство 12 отображения, например, экран, индикатор на лобовом стекле или электронные очки для отображения данных, поступающих от бортового оборудования 11A и 11B.
Фиг. 2 схематически демонстрирует первый пример бортового оборудования 11 обнаружения стрельбы и содействия пилотированию согласно изобретению. Бортовое оборудование 11 содержит, соединенные шиной 110 связи, модуль 113 обработки и многодатчиковую систему, содержащую систему 111, именуемую системой LWIR/MWIR, которая будет описана ниже со ссылкой на фиг. 3, систему 112, именуемую системой NIR, которая будет описана ниже со ссылкой на фиг. 7, и акустическую систему 115, выдающую акустический сигнал.
В конкретном варианте осуществления, бортовое оборудование 11 дополнительно содержит устройство 114 позиционирования. Устройство 114 позиционирования выдает информацию, представляющую положение, ориентацию и скорость летательного аппарата 10, используемую в процедуре содействия пилотированию, осуществляемой бортовым оборудованием 11. Это устройство 114 позиционирования может представлять собой, например, инерциальный измерительный блок (IMU).
В одном варианте осуществления, LWIR/MWIR 111, NIR 112 и акустические 115 системы и устройство 114 позиционирования при наличии, синхронизируются по времени на одной той же тактовой частоте, выдаваемой, например, модулем 113 обработки. Таким образом, каждый сигнал, поступающий от LWIR/MWIR 111, NIR 112 и акустических 115 систем и от устройства 114 позиционирования, связан с информацией времени на основании общей тактовой частоты.
В одном варианте осуществления, бортовое оборудование 11 содержит устройство 116 синхронизации, например, устройство GPS (глобальная система позиционирования), выдающее информацию тактовой частоты, позволяющую синхронизировать LWIR/MWIR 111, NIR 112 и акустические 115 системы и устройство 114 позиционирования, при наличии, на одной той же тактовой частоте.
В одном варианте осуществления, устройство 114 позиционирования и устройство 116 синхронизации являются одним и тем же устройством, например, устройством GPS.
Фиг. 3 схематически демонстрирует систему 111 LWIR/MWIR, выдающую сигнал, именуемый сигналом LWIR/MWIR, представляющий инфракрасное излучение, лежащее в длинноволновом инфракрасном (LWIR) диапазоне и в средневолновом инфракрасном (MWIR) диапазоне.
Система 111 LWIR/MWIR содержит оптическое устройство 1110, именуемое оптическим устройством LWIR/MWIR, и устройство 1111 захвата, именуемое устройством захвата LWIR/MWIR, выдающее сигнал LWIR/MWIR в форме изображений, именуемых изображениями LWIR/MWIR.
Устройство захвата 1111 LWIR/MWIR реализовано, например, двухполосным болометрическим датчиком, т.е. болометрическим датчиком, способным захватывать инфракрасное излучение, соответствующее средневолновому инфракрасному излучению MWIR и длинноволновому инфракрасному излучению LWIR. Одно преимущество двухполосного болометрического датчика состоит в том, что избавляет от необходимости иметь два датчика, каждый из которых работает в данной полосе инфракрасного излучения. Кроме того, болометрический датчик функционирует непрерывно, т.е. непрерывно захватывает инфракрасное излучение, в отличие от других датчиков, которые захватывают инфракрасное излучение на заранее заданной частоте.
Оптическое устройство 1110 LWIR/MWIR позволяет охватывать заранее заданное оптическое поле, например, 120° по горизонтали и 90° по вертикали. Каждое оптическое устройство 1110 LWIR/MWIR и каждое устройство захвата 1111 LWIR/MWIR ориентированы к зоне наблюдения. Изображения LWIR/MWIR имеют разрешение, зависящее от разрешения устройства захвата 1111 LWIR/MWIR, например, равное 512 пикселям по ширине и 384 пикселям по высоте.
Фиг. 4 схематически демонстрирует систему 112 NIR, выдающую сигнал, именуемый сигналом NIR, представляющий инфракрасное излучение, лежащее в ближнем инфракрасном (NIR) диапазоне.
Система 112 NIR содержит оптическое устройство 1120, именуемое оптическим устройством NIR и устройство 1112 захвата, именуемое устройством захвата NIR, выдающее сигнал NIR в форме изображений, именуемых изображениями NIR. Оптическое устройство 1120 NIR позволяет охватывать заранее заданное оптическое поле, например, 120° по горизонтали и 90° по вертикали. Каждое оптическое устройство 1120 NIR и каждое устройство 1121 захвата NIR ориентированы к зоне наблюдения.
Изображения NIR имеют разрешение, зависящее от разрешения устройства 1121 захвата NIR, например, равное 1024 пикселя по ширине и 768 пикселей по высоте.
Следует отметить, что, в примере бортового устройства 11, описанного в отношении фиг. 2, оптическое поле, охватываемое оптическим устройством 1110 LWIR/MWIR, такой же, как оптическое поле, охватываемое оптическим устройством 1120 NIR.
Фиг. 5 схематически демонстрирует аппаратную архитектуру модуля 1113 обработки.
Согласно примеру аппаратной архитектуры, изображенной на фиг. 5, модуль 113 обработки содержит, соединенные шиной связи 1130: процессор или CPU (центральный процессор) 1131; оперативную память (RAM) 1132; постоянную память (ROM) 1133; блок хранения, например, жесткий диск или устройство чтения носителя данных, например, устройство 1134 чтения SD (secure digital) карт; по меньшей мере один интерфейс 1135 связи, позволяющий, например, модулю 113 обработки осуществлять связь с LWIR/MWIR 111, NIR 112 и акустическими 115 системами, с устройствами позиционирования 114 и синхронизации 116, при наличии, и с устройством 12 отображения.
Процессор 1131 способен выполнять инструкции, загруженные в RAM 1132 из ROM 1133, из внешней памяти (не показана), из носителя данных (например, SD карты) или из сети связи. При включении бортового оборудования 11, процессор 1131 способен считывать инструкции из RAM 1132 и выполнять их. Эти инструкции из компьютерной программы предписывают процессору 1131 осуществлять все или некоторые из алгоритмов и этапов, описанных в отношении фиг. 6A.
Все или некоторые из алгоритмов, описанных ниже в отношении фиг. 6A, могут быть реализованы в программной форме путем выполнения набора инструкций программируемой машины, например, DSP (цифрового сигнального процессора) или микроконтроллера, или могут быть реализованы в аппаратной форме машиной или специализированным компонентом, например, FPGA (вентильной матрицей, программируемой пользователем) или ASIC (специализированной интегральной схемой).
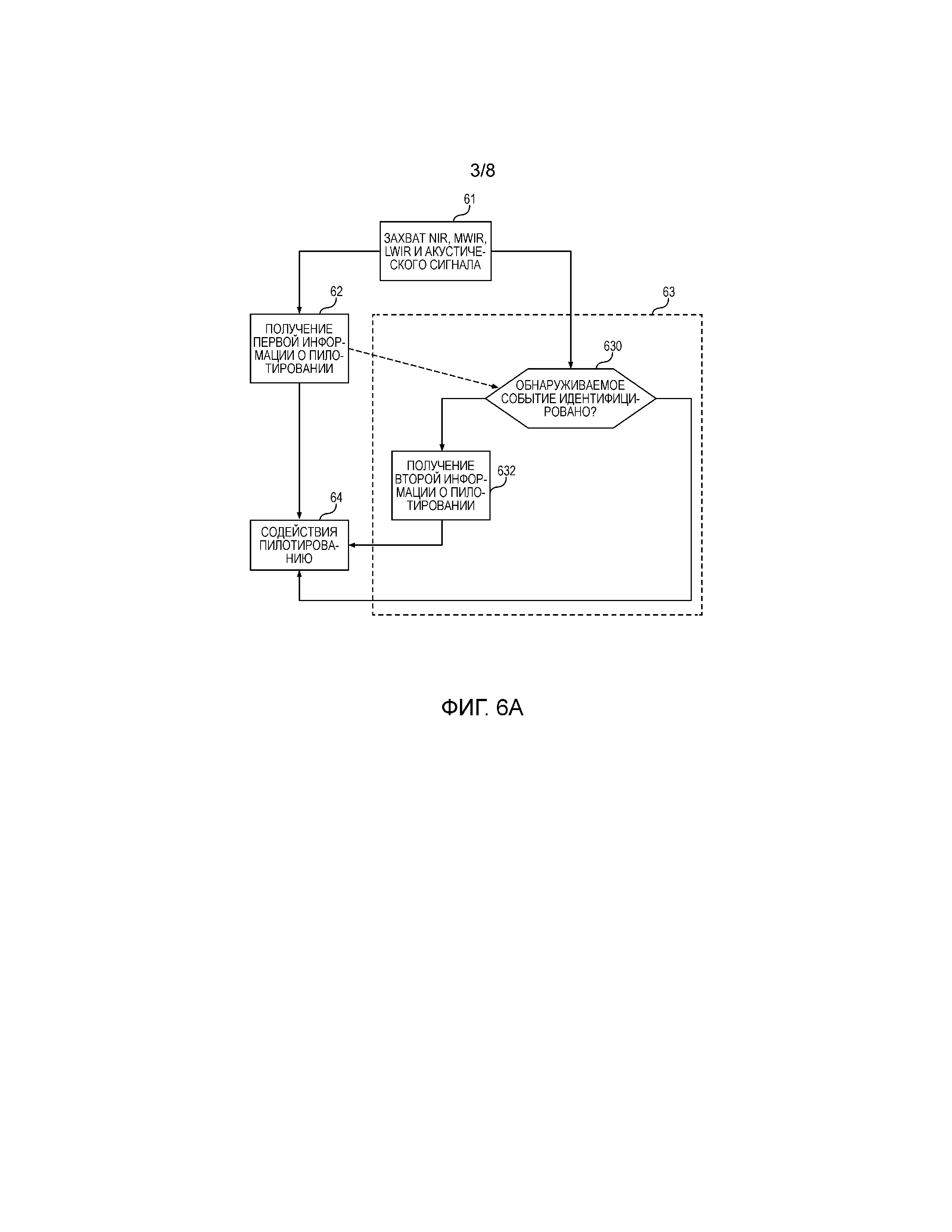
Фиг. 6A схематически демонстрирует пример комбинированного способа содействия пилотированию и обнаружения стрельбы. Способ, описанный в отношении фиг. 6A, периодически осуществляется модулем 113 обработки с частотой, например 50 Гц, пригодной для очень быстрого обнаружения препятствия, выстрела или сигнального огня.
На этапе 61, бортовое оборудование 11, под управлением модуля 113 обработки, захватывает сигналы, представляющие окружение летательного аппарата 10, из многодатчиковой системы.
После этапа 61, модуль 113 обработки осуществляет процедуру 62 содействия пилотированию и процедуру 63 обнаружения стрельбы.
Процедура 62 содействия пилотированию позволяет получить первую информацию о пилотировании, содержащую информацию, представляющую препятствия, присутствующие в окружении летательного аппарата. Информация, представляющая препятствие, может содержать, например, трехмерную (3D) реконструкцию препятствия и/или 3D реконструкцию земной поверхности, над которой перемещается летательный аппарат 10, причем земная поверхность рассматривается как препятствие.
Способы 3D реконструкции сцены из изображений известны. Эти способы используют изображения, обеспечивающие разные виды одной и той же сцены. Методы эпиполярной геометрии применяются к этим изображениям для получения 3D реконструкции сцены. Существуют различные способы получения изображений, представляющих разные виды одной и той же сцены. Согласно первому способу, изображения, обеспечивающие разные виды одной и той же сцены, получаются одной и той же системой захвата изображения, выполняющей множество последовательных захватов изображений сцены с разных точек наблюдения. Согласно второму способу, используется множество систем захвата изображения, каждая из которых наблюдает сцену из отдельной точки.
При осуществлении процедуры 62 содействия пилотированию модулем 113 обработки, модуль 113 обработки применяет один из вышеупомянутых способов 3D реконструкции к изображениям LWIR/MWIR. Фактически известно, что инфракрасный сигнал, соответствующий длинноволновому инфракрасному излучению (LWIR), особенно пригоден для получения эффективной 3D реконструкции препятствия или земной поверхности в условиях плохой видимости. Система 111 LWIR/MWIR позволяет получать сигнал LWIR/MWIR, содержащий, по существу, данные, представляющие инфракрасное излучение в длинноволновом инфракрасном (LWIR) диапазоне.
Использование способа 3D реконструкции позволяет предоставлять пилоту летательного аппарата 10 3D реконструкцию препятствий, находящихся вблизи летательного аппарата 10, и/или 3D реконструкцию земной поверхности, над которой перемещается летательный аппарат 10.
Следует отметить, что, поскольку бортовое оборудование 11, описанное в отношении фиг. 2, содержит только одну систему 111 LWIR/MWIR, эта система LWIR/MWIR последовательно выдает изображения LWIR/MWIR разных видов окружения летательного аппарата 10, захваченных в разные моменты, для обеспечения осуществления способа 3D реконструкции. При этом предполагается, что летательный аппарат 10 находится в движении, и, следовательно, что два последовательных изображения одной и той же сцены, наблюдаемой системой LWIR/MWIR, захваченные в разные моменты, представляют два разных вида одной и той же сцены.
Информацию, представляющую препятствие, полученное при осуществлении процедуры 3D реконструкции, можно расширить с использованием информации о местоположении и скорости летательного аппарата 10. В частности, информация о местоположении и скорости летательного аппарата 10 используется для определения информации, позволяющей избегать столкновений с препятствиями. Информация, позволяющая избегать столкновений с препятствиями, содержит, например, информацию, указывающую относительное положение летательного аппарата 10 относительно препятствия и/или информацию, указывающую направление для уклонения от препятствия, и/или информацию, указывающую время до столкновения с препятствием. В одном варианте осуществления, устройство 114 позиционирования выдает информацию о местоположении, ориентации и скорости летательного аппарата 10. Таким образом, информация, представляющая препятствие, содержащая 3D реконструкцию (препятствий или земной поверхности) и информация, позволяющая избегать столкновений с препятствиями, помогает пилоту летательного аппарата 10 совершать полет в условиях ограниченной видимости.
Процедура 63 обнаружения стрельбы позволяет получить вторую информацию о пилотировании, содержащей информацию, представляющую стрельбу вблизи летательного аппарата 10. При осуществлении процедуры 63 обнаружения стрельбы, модуль 113 обработки ищет на этапе 630 по меньшей мере одну особенность в сигналах, представляющих окружение летательного аппарата 10, выдаваемым многодатчиковой системой. Этап 630 поиска по меньшей мере одной особенности, подробно описанный далее в отношении фиг. 6B, позволяет определить, произошло ли событие, соответствующее искомому типу события вблизи летательного аппарата, и определить географическое местоположение источника этого события.
В случае идентификации на этапе 630 события, соответствующего искомому типу события, модуль 113 обработки получает, на этапе 632, вторую информацию о пилотировании в зависимости от типа и географического местоположения источника упомянутого события. Пример способа, осуществляемого на этапе 632, описан далее в отношении фиг. 6C. Затем модуль 113 обработки осуществляет этап 64, на котором модуль 113 обработки отображает, на устройстве отображения пилота летательного аппарата 10, параметры содействия пилотированию, определенные из первой и второй информации о пилотировании. Параметры содействия пилотированию содержат, например, 3D реконструкцию препятствий или земной поверхности, окружающих летательный аппарат, соответствующую первой информации о пилотировании, на которую накладывается вторая информация о пилотировании. Как описано далее в отношении фиг. 6C, вторая информация о пилотировании содержит, например, информацию о географическом местоположении источников стрельбы и/или габаритных огней и/или информацию, представляющую зоны дальности стрельбы и/или зоны для уклонения от габаритных огней и/или направления выхода из зон дальности стрельбы и/или направления пилотирования без захода в зоны уклонения.
Если не идентифицировано ни одного события, соответствующего искомому типу события, модуль 113 обработки осуществляет этап 64 получения параметров пилотирования с использованием только первой информации о пилотировании.
Фиг. 6B схематически демонстрирует пример способа поиска по меньшей мере одной особенности в сигналах, представляющих окружение летательного аппарата 10.
На этапе 6300, модуль 113 обработки ищет первую особенность в первом сигнале, включенном в сигналы, представляющие окружение летательного аппарата 10. В примере, описанном в отношении фиг. 6B, первым сигналом является сигнал LWIR/MWIR. В этом случае, считается, что особенность присутствует в сигнале LWIR/MWIR при обнаружении вспышки света в по меньшей мере одном изображении LWIR/MWIR.
Вспышка света появляется в изображении в форме объекта высокой светимости на фоне более низкой светимости. Применительно к обнаружению стрельбы или сигнальных огней, вспышка света соответствует сигналу, выдаваемому сигналом захвата изображения, соответствующим световому сигналу, обусловленному дульной вспышкой или сигнальным огнем. Для обнаружения вспышки света в изображении, модуль 113 обработки использует процедуру для обнаружения вспышки света. В одном варианте осуществления, эта процедура содержит получение другого изображения, соответствующее попиксельному вычитанию между изображением, в котором производится поиск вспышки света, и предыдущим изображением. Затем модуль 113 обработки осуществляет поиск высоких пространственных градиентов в разностном изображении. Этот поиск может содержать, например, вычисление градиента значений светимости для каждого пикселя в разностном изображении. Для этого модуль 113 обработки вычисляет среднее разностей между упомянутыми пикселями и восемью соседними пикселями. Когда на границе области разностного изображения вычислены высокие градиенты, эта область интерпретируется как вспышка света. В одном варианте осуществления, изображение, в котором производится поиск вспышки, и предыдущее изображение регулируются посредством анаморфоза для компенсации перемещений летательного аппарата 10 между двумя изображениями.
Вспышка света может происходить по нескольким причинам. Некоторые причины, например, солнечный блик, не представляют интереса при обнаружении стрельбы и поэтому не должны учитываться. Известно, что солнечный блик наблюдается в сигнале NIR и в сигнале MWIR или LWIR, тогда как вспышка света вследствие выстрела наблюдается в сигнале MWIR, едва наблюдается в сигнале LWIR, и не наблюдается в сигнале NIR.
Когда первая особенность найдена в сигнале LWIR/MWIR, т.е. когда первая вспышка света обнаруживается в по меньшей мере одном изображении LWIR/MWIR, модуль 113 обработки ищет, на этапе 6301, вторую особенность в по меньшей мере одном втором сигнале, включенном в сигналы, представляющие окружение летательного аппарата 10. При этом первая и вторая особенности приходят из разных сигналов. Чтобы эти две особенности позволяли идентифицировать искомое событие, необходимо, чтобы эти две особенности имели один и тот же источник. Считается, что первая и вторая особенности имеют один и тот же источник, когда эти две особенности коррелируют по времени. Первая особенность, обнаруженная в сигнале LWIR/MWIR, считается коррелирующей по времени со второй особенностью, обнаруженной в сигнале NIR, когда эти две особенности соответствуют одному и тому же моменту захвата. Первая особенность, обнаруженная в акустическом сигнале, считается коррелирующей по времени со второй особенностью, обнаруженной в NIR (или, соответственно, в LWIR/MWIR) сигнал, когда два момента захвата первой и второй особенностей смещены на период, зависящий от разности скорости распространения света и скорости распространения звука.
Когда первой особенностью является вспышка света в изображении LWIR/MWIR, вторая особенность производится поиск в сигнале NIR. Считается, что особенность присутствует в сигнале NIR при обнаружении вспышки света в по меньшей мере одном изображении NIR. Затем модуль 113 обработки переходит к поиску второй вспышки света в изображении NIR таким же образом, как производился поиск первой вспышки света в изображении LWIR/MWIR. Если вторая вспышка света, коррелирующая в пространстве и во времени с первой вспышкой света, обнаруживается в изображении NIR, модуль 113 обработки определяет, на этапе 6302, что первая и вторая вспышки света соответствуют солнечному блику. Обнаружение солнечного блика не соответствует искомому событию. При этом считается, что первая вспышка света в изображении LWIR/MWIR коррелирует во времени и в пространстве со второй вспышкой света в изображении NIR, если две вспышки света соответствуют одному и тому же моменту и имеют соответствующие пространственные положения в соответствующих изображениях LWIR/MWIR и NIR. Корреляция в пространстве и во времени между первой и второй вспышками света позволяет определить, что две вспышки света, наблюдаемые в двух разных изображениях (изображении LWIR/MWIR и изображении NIR) соответствуют одному и тому же физическому явлению, т.е. одному и тому же солнечному блику.
Если на этапе 6303 в изображении NIR не удается обнаружить ни одной второй вспышки света, коррелирующей с первой вспышкой света, модуль 113 обработки определяет, что первая особенность, обнаруженная в изображении LWIR/MWIR, соответствует выстрелу. Обнаружение выстрела соответствует искомому событию.
В этом случае, на этапе 6304, модуль 113 обработки определяет географическое местоположение источника события, т.е. источника стрельбы. Первая особенность (т.е. первая вспышка света), которая позволила идентифицировать событие, соответствующее выстрелу, была обнаружена в по меньшей мере одном изображении LWIR/MWIR. Эта первая вспышка света связана с положением в каждом изображении LWIR/MWIR. Как описано выше в отношении этапа 620, изображения LWIR/MWIR также используются при осуществлении процедуры обнаружения препятствия 62, для обеспечения 3D реконструкции препятствий или земной поверхности. Когда в 3D реконструкции используется изображение LWIR/MWIR, содержащее первую вспышку света, положение вспышки света в изображениях LWIR/MWIR проецируется в 3D реконструкцию. Это позволяет легко найти географическое местоположение источника стрельбы из проекции положения первой вспышки света в 3D реконструкцию и информации о местоположении, ориентации и скорости летательного аппарата 10, выдаваемой, например, устройством 114. Дело в том, что географическое местоположение источника стрельбы получается таким же образом, как информация, позволяющая избегать столкновений с препятствиями.
Поиск особенностей, осуществляемый на этапах 6300 и 6301, позволяет определить, что выстрел произошел вблизи летательного аппарата. Эти этапы не позволяют определить, предназначался ли обнаруженный выстрел для летательного аппарата.
На этапе 6305, для определения, предназначался ли обнаруженный выстрел для летательного аппарата, модуль 113 обработки ищет в акустическом сигнале особенность, коррелирующую по времени с первой особенностью, т.е. коррелирующий по времени с первой вспышкой света, обнаруженной в по меньшей мере одном изображении LWIR/MWIR. Считается, что акустический сигнал содержит особенность при обнаружении волны Маха в акустическом сигнале. В контексте изобретения, волна Маха соответствует пику амплитуды шума в однородном акустическом сигнале, соответствующем шуму летательного аппарата 10. Измерения показали, что летательный аппарат, например вертолет, создает акустический сигнал, имеющий среднюю амплитуду 100 дБ, тогда как волна Маха создает очень короткий акустический сигнал с пиком амплитуды 120 дБ. Для определения уровня корреляции между волной Маха и вспышкой света, необходимо учитывать смещение по времени между волной Маха и вспышкой света. Световой сигнал, соответствующий дульной вспышке, обнаруженной в форме вспышки света системой 111 LWIR/MWIR, почти мгновенно покрывает расстояние между географическим местоположением источника стрельбы и летательным аппаратом 10. Волна Маха возникает, когда снаряд проходит вблизи летательного аппарата 10. Таким образом, смещение по времени T между волной Маха и вспышкой света приблизительно соответствует времени, за которое снаряд проходит расстояние D между источником стрельбы и летательным аппаратом. В одном варианте осуществления, считается, что скорость V снаряда известна. Таким образом, смещение по времени T можно получить делением расстояния D на скорость V. Волна Маха, соответствующая моменту T1, считается коррелирующей со вспышкой света, соответствующей моменту T2, если разность T1-T2 близка к T. В одном варианте осуществления, волна Маха коррелирует со вспышкой света, если разность T1-T2 равна T.
Следует обратить внимание на то, что задержки на обработку системой 111 LWIR/MWIR и/или акустической системой 115 могут вносить погрешности в измерение моментов T1 и T2. При этом считается, что эти времена обработки известны. Время, необходимое акустическому устройству 115 для обработки акустического сигнала, обозначается Δ1. Время, необходимое устройству 111 LWIR/MWIR для обработки сигнала LWIR/MWIR, обозначается Δ2. В одном варианте осуществления, эти времена обработки учитываются модулем 113 обработки для определения, коррелирует ли особенность, обнаруженная в акустическом сигнале, с особенностью, обнаруженной в сигнале LWIR/MWIR. В этом варианте осуществления, волна Маха коррелирует со вспышкой света, если разность (T1-Δ1)-(T2-Δ2) равна T.
При обнаружении волны Маха, коррелирующей с первой вспышкой света, в акустическом сигнале, модуль 113 обработки определяет, на этапе 6307, что событие соответствует выстрелу в направлении летательного аппарата 10. Обнаружение волны Маха также означает, что снаряд прошел вблизи летательного аппарата 10, и, следовательно, летательный аппарат 10 находится в зоне дальности стрельбы. Если волны Маха, коррелирующей с первой вспышкой света, не обнаружено, модуль 113 обработки определяет, на этапе 6306, что событие соответствует выстрелу, не предназначенному для летательного аппарата 10.
Если на этапе 6300 первой особенности в сигнале LWIR/MWIR не обнаружено, модуль 113 обработки, на этапе 6308, ищет вторую особенность в сигнале NIR. Если в по меньшей мере одном изображении NIR обнаружена вспышка света, модуль 113 обработки, на этапе 6309, определяет, что был обнаружен габаритный огонь. Обнаружение габаритного огня соответствует искомому событию.
На этапе 6310, модуль 113 обработки определяет географическое местоположение источника обнаруженного события, т.е. определяет географическое местоположение габаритного огня. Вспышка света, обнаруженная в по меньшей мере одном изображении NIR, связана с координатами в каждом изображении NIR. Этих координат в каждом изображении NIR недостаточно для определения географического местоположения источника события. Еще раз, для определения географического местоположения источника события, модуль 113 обработки будет использовать информацию, полученную при осуществлении процедуры 62 содействия пилотированию. Для этого модуль 113 обработки ищет изображение LWIR/MWIR, соответствующее по времени каждому изображению NIR, в котором была обнаружена вспышка света. Затем координаты вспышки света в каждом изображении NIR проецируются в каждое найденное изображение LWIR/MWIR, что позволяет получить координаты вспышки света, обнаруженной в по меньшей мере одном изображении NIR в по меньшей мере одном изображении LWIR/MWIR. Зная координаты вспышки света, обнаруженной в по меньшей мере одном изображении LWIR/MWIR, модуль 113 обработки определяет географическое местоположение источника события таким же образом, как определял географическое местоположение источника стрельбы на этапе 6304.
Если на этапе 6308 в сигналах LWIR/MWIR и в сигналах NIR не обнаружено ни первых, ни вторых особенностей, соответственно, модуль 113 обработки, на этапе 6311, ищет особенность, в форме волны Маха, в акустическом сигнале. Если в акустическом сигнале не обнаружено ни одной особенности, модуль 113 обработки определяет, на этапе 6312, что вблизи летательного аппарата 10 не произошло ни одного искомого события.
Если на этапе 6311 обнаружена волна Маха, модуль 113 обработки, на этапе 6313, определяет, что обнаружен выстрел в направлении летательного аппарата 10, не наблюдаемый в сигнале LWIR/MWIR. Обнаружение волны Маха также означает, что снаряд прошел вблизи летательного аппарата 10, и, следовательно, летательный аппарат 10 находится в зоне дальности стрельбы. Как явствует из вышеизложенного, выстрел в направлении летательного аппарата является искомым событием.
Согласно варианту осуществления, пригодному для малошумного летательного аппарата, модуль 113 обработки определяет географическое местоположение источника события, т.е. источника стрельбы, применяя способы, описанные в статье ʺSniper Location Using Acoustic Asynchronous Sensorsʺ, Damarla, T; Kaplan L M; Whipps G T, Sensors Journal, IEEE, vol. 10, no. 9, pp. 1469, 1478, Sept 2010). В этом варианте осуществления, для повышения точности определения географического местоположения, географическое местоположение, полученное с использованием акустического сигнала, проецируется в 3D реконструкцию препятствий или земной поверхности, полученную способом 62 содействия пилотированию.
Известно, что вспышка света, порожденная оружием, наблюдается в одном, максимум, двух последовательных изображениях. Большие длительности возможны для оружия большего калибра, например, пушки. Измерение длительности вспышки света, выражаемой количеством изображений, может давать информацию, которая позволяет надежнее обнаруживать выстрел или позволяет точнее идентифицировать тип выстрела.
Кроме того, можно также измерять частоту повторения вспышки света. Частоту повторения также можно использовать для уточнения идентификации типа выстрела. Например, одиночную вспышку света можно идентифицировать как пистолетный выстрел, тогда как вспышку света, имеющую данную частоту повторения, можно интерпретировать как огонь, ведущийся из автомата того или иного типа.
В одном варианте осуществления, модуль 113 обработки измеряет частоту повторения и/или длительность вспышки света и использует измеренные частоту повторения и/или длительность для уточнения идентификации типа выстрела.
Способ, описанный в отношении фиг. 6B, начинается с поиска особенности в изображениях LWIR/MWIR, после чего производится поиск особенности в изображениях NIR и поиск особенностей в акустическом сигнале. Однако порядок поиска в сигналах, представляющих окружение летательного аппарата 10, может отличаться, не приводя ни к каким изменениям в результатах способа. Например, способ может начинаться с поиска особенности в изображениях NIR или в акустическом сигнале.
Фиг. 6C схематически демонстрирует пример способа получения второй информации о пилотировании в зависимости от типа и географического источника обнаруженного события.
Способ, проиллюстрированный в отношении фиг. 6C, использует информацию, полученную модулем 113 обработки при осуществлении способа, показанного на фиг. 6B, которую модуль 113 обработки сохранил в памяти. Эта информация указывает обнаруженное событие: наблюдаемый выстрел, не направленный на летательный аппарат 10, наблюдаемый выстрел, направленный на летательный аппарат 10, сигнальный огонь, ненаблюдаемый выстрел в направлении летательного аппарата 10, летательный аппарат 10 в зоне дальности стрельбы и т.д.
На этапе 6320 модуль обработки проверяет, является ли обнаруженное событие выстрелом. Если событие является выстрелом, модуль 113 обработки проверяет, на этапе 6321, направлен ли выстрел на летательный аппарат 10.
Из этапов 6307 и 6313 следует, что модуль 113 обработки определяет, что выстрел направлен на летательный аппарат 10, когда в акустическом сигнале обнаруживается волна Маха, коррелирующая с первой особенностью, обнаруженной в сигнале LWIR/MWIR. Обнаружение этой коррелирующей волны Маха также указывает, что летательный аппарат 10 находится в зоне дальности стрельбы. В этом случае важно определить зону дальности стрельбы, чтобы как можно быстрее покинуть ее.
Если выстрел направлен на летательный аппарат 10 (и летательный аппарат 10 находится в зоне дальности стрельбы), модуль 113 обработки определяет, на этапе 6326, зону дальности стрельбы. Зона дальности стрельбы представляет собой сферу с центром в географическом источнике стрельбы и радиусом, равным дальнобойности оружия, из которого ведется огонь. В одном варианте осуществления, дальнобойность, используемая модулем 113 обработки, является постоянной дальностью, соответствующей максимальной дальности, измеренной в ходе испытаний на наборе традиционных вооружений. Вторая информация о пилотировании, содержащая географическое местоположение источника стрельбы и радиус зоны дальности стрельбы, сохраняется в памяти модуля 113 обработки.
После этапа 6326, на этапе 6324, модуль 113 обработки определяет направление выхода из зоны дальности стрельбы, позволяющее как можно быстрее покинуть зону дальности стрельбы. Для этого модуль обработки, используя информацию о препятствиях, выдаваемую процедурой 62 содействия пилотированию, определяет направление выхода из зоны дальности стрельбы, соответствующее минимальному расстоянию между положением летательного аппарата и границей зоны дальности стрельбы, с учетом любых препятствий. Вторая информация о пилотировании дополняется определенным направлением выхода.
Если на этапе 6321 определено, что огонь ведется не в направлении летательного аппарата 10, модуль 113 обработки определяет зону дальности стрельбы, осуществляя этап 6322, идентичный этапу 6326. Однако отсутствие обнаружения волны Маха не позволяет столь быстро определить, находится ли летательный аппарат 10 в зоне дальности стрельбы или вне зоны дальности стрельбы. На основании расстояния между географическим местоположением источника стрельбы и летательным аппаратом 10, модуль 113 обработки, на этапе 6323, определяет, находится ли летательный аппарат в зоне дальности стрельбы или вне зоны дальности стрельбы.
Если летательный аппарат 10 находится вне зоны дальности стрельбы, вторая информация о пилотировании дополняется, на этапе 6325, информацией, указывающей, что летательный аппарат находится вне зоны дальности стрельбы.
Если летательный аппарат 10 находится в зоне дальности стрельбы, модуль 113 обработки осуществляет вышеописанный этап 6324.
Если, на этапе 6320, модуль обработки определяет, что обнаруженное событие не является выстрелом, он приходит к выводу, что обнаруженное событие является обнаружением сигнального огня.
На этапе 6327, модуль 113 обработки определяет зону уклонения вокруг географического местоположения сигнального огня. В одном варианте осуществления, модуль 113 обработки определяет зону уклонения с использованием заранее заданного расстояния, представляющего минимальное расстояние, которое необходимо поддерживать между географическим местоположением сигнального огня и летательным аппаратом 10. В этом случае зона уклонения представляет собой сферу с центром в географическом местоположении сигнального огня. Вторая информация о пилотировании, содержащая географическое местоположение сигнального огня и радиус зоны уклонения, сохраняются в памяти модуля 113 обработки.
На этапе 6328, модуль 113 обработки определяет, движется ли летательный аппарат к зоне уклонения. Для этого модуль обработки использует информацию об ориентации летательного аппарата 10, выдаваемую, например, устройством 114 позиционирования.
Если летательный аппарат 10 движется к зоне уклонения, модуль 113 обработки определяет время уклонения, на этапе 6329, из информации скорости, выдаваемой, например, устройством 114 позиционирования. Время уклонения представляет собой оценку времени, необходимого летательному аппарату 10 для достижения зоны уклонения, если оно поддерживает скорость и направление движения, выдаваемые устройством 114 позиционирования. Вторая информация о пилотировании дополняется путем добавления к ней определенного времени уклонения.
На этапе 6330, модуль 113 обработки определяет по меньшей мере одно направление уклонения. Для этого модуль обработки, используя информацию о препятствиях, выдаваемую процедурой 62 содействия пилотированию, определяет по меньшей мере одно направление, позволяющее избегать зоны уклонения, уклоняясь при этом от любых препятствий. Вторая информация о пилотировании дополняется путем добавления к ней каждого определенного направления уклонения.
Если летательный аппарат не движется к зоне уклонения, на этапе 6331 Вторая информация о пилотировании дополняется путем добавления к ней информации, указывающей, что летательный аппарат не движется к зоне уклонения.
Затем информация содействия пилотированию, хранящаяся в памяти, используется на этапе 64 для определения информации содействия пилотированию.
Фиг. 7 схематически демонстрирует второй пример бортового оборудования 11 обнаружения стрельбы и содействия пилотированию. Бортовое оборудование, описанное в отношении фиг. 7, способно осуществлять способ, описанный в отношении фиг. 6A.
Бортовое оборудование 11, описанное в отношении фиг. 2, содержит устройство LWIR/MWIR. Ограничения в техническом осуществлении устройств LWIR/MWIR, например, болометрических датчиков, означают, что, в общем случае, эти датчики имеют низкое разрешение, более низкое, чем разрешение устройств NIR. Устройство захвата LWIR/MWIR типа болометрического датчика может достигать разрешения 1024 пикселя по ширине и 768 пикселей по высоте, тогда как датчик NIR может достигать, например, разрешения 2560 пикселей по ширине и 2160 пикселей по высоте.
Дульные вспышки, вызванные ведением огня, в общем случае, имеют малый размер, тем более, потому, что они наблюдаются с летательного аппарата 10 из положения, которое может быть относительно удаленным от источника стрельбы. Чтобы дульную вспышку можно было обнаружить в виде вспышки света в изображении LWIR/MWIR, предпочтительно, чтобы устройство захвата LWIR/MWIR имело достаточное разрешение. Разрешение 1024 на 768 обычно считается слишком низким.
Бортовое оборудование 11, описанное в отношении фиг. 7, содержит многодатчиковую систему, содержащую четыре системы 111A, 111B, 111C и 111D LWIR/MWIR, систему 112 NIR и четыре акустических устройства 115A, 115B, 115C и 115D.
Каждая система 111A, 111B, 111C и 111D LWIR/MWIR содержит устройство захвата LWIR/MWIR, идентичное устройству 1111 захвата. Оптическое устройство LWIR/MWIR каждой системы 111A, 111B, 111C и 111D LWIR/MWIR охватывает оптическое поле, соответствующее четверти оптического поля, охватываемого оптическим устройством 1110 LWIR/MWIR. Системы 111A, 111B, 111C и 111D LWIR/MWIR размещены в бортовом оборудовании таким образом, что объединение оптических полей, охватываемых оптическими устройствами LWIR/MWIR систем 111A, 111B, 111C и 111D LWIR/MWIR, дает объединенное оптическое поле, идентичное оптическому полю, охватываемому оптическим устройством 1120 NIR. Кроме того, объединение изображений LWIR/MWIR, выдаваемых четырьмя системами 111A, 111B, 111C и 111D LWIR/MWIR, дает изображения LWIR/MWIR, имеющие разрешение 2048 пикселей по ширине и 1536 пикселей по высоте. Следовательно, объединение информации, выдаваемой четырьмя системами 111A, 111B, 111C и 111D LWIR/MWIR, дает систему, эквивалентную системе LWIR/MWIR, охватывающей оптическое поле, идентичное оптическому полю, охватываемому системой 1120 NIR, и выдающей изображения, имеющие разрешение 2048 пикселей по ширине и 1536 пикселей по высоте.
Четыре акустических системы 115A, 115B, 115C и 1115D идентичны акустической системе 115. Использование множества акустических датчиков позволяет улучшать прием звуков вокруг летательного аппарата 10. Акустические датчики могут быть фактически распределены по бортовому оборудованию 11 для приема звуков, поступающих с нескольких направлений.
Бортовое оборудование 11, описанное в отношении фиг. 7, содержит три шины 110A, 110B и 11°C связи, соединенные шиной 110D связи.
Шина 111A связи соединяет устройства 111A, 111B, 111C и 111D LWIR/MWIR с модулем 113A обработки, аналогичным модулю 113 обработки, описанному в отношении фиг. 5.
Шина 111B связи соединяет устройство NIR 112 с устройством 113B обработки, аналогичным модулю 113 обработки, описанному в отношении фиг. 5.
Шина 111C связи соединяет четыре акустических устройства 115A, 115B, 115C и 115D с модулем 113C обработки, аналогичным модулю 113 обработки.
Когда бортовое оборудование 11 содержит устройство 114 позиционирования и устройство 116 синхронизации, устройство 114 позиционирования подключено к шине 110A, тогда как устройство 116 синхронизации подключено к шине 110D связи.
В одном варианте осуществления, модуль обработки, отличный от модулей 113A, 113B и 113C обработки, именуемый главным модулем обработки, централизует осуществление способа, представленного на фиг. 6A. В этом случае главный модуль обработки подключен к шине 110D связи. Главный модуль обработки активирует и деактивирует модули 113A, 113B и 113C обработки, чтобы они инициировали захват LWIR/MWIR, NIR и акустических сигналов для осуществления этапа 630, описанного в отношении фиг. 6A и подробно описанного в отношении фиг. 6B.
Этап 6300, на котором производится поиск первой особенности в сигнале LWIR/MWIR, осуществляется модулем 113A обработки.
После осуществления этапа 6300, модуль 113A обработки передает на главный модуль обработки сообщение, указывающее, обнаружена ли первая особенность в сигнале LWIR/MWIR. Главный модуль обработки пересылает это сообщение на модуль 113B обработки. Согласно результату поиска первой особенности, модуль 113B обработки осуществляет этап 6301 или этап 6308.
Согласно результату поиска, особенности в сигнале NIR на этапе 6301, модуль 113B обработки осуществляет этап 6302 или этапы 6303 и 6304.
После осуществления этапа 6304, модуль 113B обработки передает на главный модуль обработки сообщение, содержащее информацию, представляющую географическое местоположение источника стрельбы. Главный модуль обработки пересылает это сообщение на модуль 113C обработки. Затем модуль 113C обработки осуществляет этапы 6305, 6306 и 6307.
Согласно результату поиска, особенности в сигнале NIR на этапе 6308, модуль 113B обработки осуществляет этапы 6309 и 6310 или передает на главный модуль обработки сообщение, указывающее, что в сигналах LWIR/MWIR и NIR не найдено никаких особенностей. Главный модуль обработки пересылает это сообщение на модуль 113C обработки.
Приняв это сообщение, модуль 113C обработки осуществляет этапы 6311, 6312, 6313 и 6314.
В одном варианте осуществления, способ, описанный в отношении фиг. 6A, осуществляется модулями 113A, 113B и 113C обработки без участия четвертого модуля обработки. Затем один из модулей 113A, 113B и 113C обработки назначается главным модулем обработки. Назначенный таким образом главный модуль обработки осуществляет этапы 62, 64 и 632 и управляет осуществлением этапов 61 и 630 модулями 113A, 113B и 113C обработки.
В одном варианте осуществления, главный модуль обработки осуществляет способ, представленный на фиг. 6A. В этом варианте осуществления модули 113A, 113B и 113C обработки обеспечивают только управление захватом и преобразованием сигналов, поступающих от LWIR/MWIR, NIR и акустических устройств для использования их главным модулем обработки.
Фиг. 8 схематически демонстрирует третий пример бортового оборудования 11 обнаружения стрельбы и содействия пилотированию. Бортовое оборудование 11, описанное в отношении фиг. 8, способно осуществлять способ, описанный в отношении фиг. 6A.
Конфигурация бортового оборудования 11, описанного в отношении фиг. 8, позволяет использовать аппаратные модули обработки, обладающие ограниченными возможностями обработки. Некоторые аппаратные модули обработки имеют ограниченные возможности обработки. Эти аппаратные модули обработки могут одновременно обрабатывать лишь ограниченное количество потоков изображений. Хотя существуют аппаратные модули обработки, обладающие более широкими возможностями обработки, аппаратные модули обработки с ограниченными возможностями все же используются, поскольку эти модули прошли испытания на надежность и/или в силу их дешевизны.
Иллюстративное бортовое оборудование 11, описанное в отношении фиг. 8, использует модули 113A и 113B обработки способные одновременно обрабатывать три потока изображений. Однако бортовое оборудование 11, описанное в отношении фиг. 8, содержит многодатчиковую систему, идентичную многодатчиковой системе бортового оборудования, описанной в отношении фиг. 7.
Чтобы бортовое оборудование 11 могло одновременно обрабатывать сигналы LWIR/MWIR и NIR, бортовое оборудование 11 использует пригодную конфигурацию. В этой конфигурации, три шины 110A, 110B и 11°C связи соединены шиной 110D связи.
Шина 111A связи соединяет системы 111A, 111B и 111C LWIR/MWIR с модулем 113A обработки, аналогичным модулю 113 обработки, описанному в отношении фиг. 5.
Шина 111B связи соединяет систему 111D LWIR/MWIR и систему 112 NIR с модулем 113B обработки, аналогичным модулю 113 обработки, описанному в отношении фиг. 5.
Шина 111C связи соединяет четыре акустических устройства 115A, 115B, 115C и 115D с модулем 113C обработки, аналогичным модулю 113 обработки, описанному в отношении фиг. 5. Когда бортовое оборудование 11 содержит устройство 114 позиционирования и устройство 116 синхронизации, устройство 114 позиционирования и устройство 116 синхронизации подключены к шине 110D связи.
Благодаря распределению систем 111A, 111B, 111C и 111D LWIR/MWIR и системы 112 NIR как описано в отношении фиг. 6, каждый модуль 113A и 113B обработки принимает максимум три потока изображений.
Фиг. 9 схематически демонстрирует пример механической установки бортового оборудования 11 обнаружения стрельбы и содействия пилотированию. Бортовое оборудование 11 является, например, одним из бортового оборудования 11A и 11B. Этот пример механической установки соответствует примерам бортового оборудования 11, описанным в отношении фиг. 7 и 8. В примере, приведенном на фиг. 9, бортовое оборудование 11 содержит корпус 119, заключающий в себе все элементы, образующие бортовое оборудование 11. В примере, описанном в отношении фиг. 9, корпус 119 имеет кубическую форму. Однако он может иметь более обтекаемую форму. На одной из квадратных граней бортового оборудования, именуемой поверхностью наблюдения, направленной к зоне наблюдения, располагается многодатчиковая система.
Многодатчиковая система содержит четыре системы 111A, 111B, 111C и 111D LWIR/MWIR. Каждая система 111A, 111B, 111C и 111D LWIR/MWIR располагается в отдельном углу квадратной поверхности, представляющей поверхность наблюдения.
Каждое оптическое устройство 1110 LWIR/MWIR позволяет охватывать оптическое поле 60° по горизонтали и 45° по вертикали. Каждое оптическое устройство 1110 LWIR/MWIR и каждый датчик 1111 LWIR/MWIR ориентирован к зоне наблюдения. Распределение систем 111A, 111B, 111C и 111D LWIR/MWIR по четырем углам поверхности наблюдения позволяет бортовому оборудованию 11 выдавать изображения LWIR/MWIR, представляющие оптическое поле 120° по горизонтали и 90° по вертикали с разрешением 2048 пикселей по ширине и 1536 пикселей по высоте.
Многодатчиковая система также содержит систему NIR, находящуюся в центре квадратной поверхности, представляющей поверхность наблюдения бортового оборудования 11. Устройство 1121 захвата NIR имеет разрешение, например, 2560 пикселей по ширине и от 1920 до 2160 пикселей по высоте. Кроме того, оптическое устройство 1120 NIR позволяет охватывать оптическое поле 120° по горизонтали и 90° по вертикали, идентичное оптическому полю, охватываемому системами 111A, 111B, 111C и 111D LWIR/MWIR.
Кроме того, бортовое оборудование 11 содержит четыре акустических системы (115A, 115B, 115C, 115D) распределенные по корпусу 119 для захвата звуков, исходящих с множества разных направлений.
Бортовое оборудование 11 также содержит устройство 118 обработки. Устройство 118 обработки объединяет в себе модули 113A, 113B и 113C обработки, а также главный модуль обработки, при наличии. LWIR/MWIR 111A, 111B, 111C, 111D, NIR 112 и акустические 115A, 115B, 115C, 115D системы и устройства позиционирования 114 и синхронизации 116, при наличии, подключены к устройству 118 обработки шинами 110A, 110B, 11°C и 110D связи.
В одном варианте осуществления, летательный аппарат 10 содержит множество единиц бортового оборудования 11, как описано в отношении фиг. 2, 7 и 8. Единицы бортового оборудования установлены на летательном аппарате 10 в достаточном количестве и имеют пригодное расположение на летательном аппарате 10, что позволяет, комбинируя изображения LWIR/MWIR, получать изображение, представляющее цилиндрическую панораму, именуемую цилиндрической панорамой LWIR/MWIR, вокруг летательного аппарата 10, и позволяет, комбинируя изображения NIR, получать изображение, представляющее цилиндрическую панораму, именуемую панорамой NIR, вокруг летательного аппарата 10. Например, в случае летательного аппарата, содержащего бортовое оборудование, как описано в отношении фиг. 7 или 8, когда оптическое поле, охватываемое устройством LWIR/MWIR, составляет 120° по горизонтали, и оптическое поле, охватываемое устройством NIR, составляет 120° по горизонтали, необходимо распределять по меньшей мере три единицы бортового оборудования 11 на летательном аппарате 10, чтобы полное оптическое поле гарантированно составляло 360° вокруг летательного аппарата 10.
В одном варианте осуществления, летательный аппарат 10 содержит по меньшей мере четыре единицы бортового оборудования 11, как описано в отношении фиг. 7 и 8. Единицы бортового оборудования 11 располагаются так, чтобы охватывать полное оптическое поле 360° вокруг летательного аппарата 10. Кроме того, летательный аппарат 10 имеет несколько единиц бортового оборудования 11, позволяющих оптическим полям перекрываться на некоторых участках полного оптического поля. Перекрывающиеся оптические поля позволяют получать стереоскопическое видение на упомянутых участках полного оптического поля.
Стереоскопическое видение может использоваться при использовании методов 3D реконструкции с использованием эпиполярной геометрии, поскольку это позволяет выдавать изображения одной и той же сцены с разных точек наблюдения.
Стереоскопическое видение также можно, известными способами, использовать для определения расстояния между препятствием и летательным аппаратом 10. Для этого достаточно знать фактический размер местного ориентира, появляющегося в изображениях LWIR/MWIR, используемых для получения 3D реконструкции объекта или земной поверхности вокруг летательного аппарата 10. Вычисляя отношение между видимым размером местного ориентира в изображениях LWIR/MWIR и фактическим размером местного ориентира, можно определить расстояние между местным ориентиром и летательным аппаратом 10. Из расстояния между местным ориентиром и летательным аппаратом 10 и 3D реконструкции препятствия или земной поверхности вокруг летательного аппарата 10, можно восстановить расстояние между летательным аппаратом 10 и любым другим объектом, содержащимся в 3D реконструкции. Кроме того, измеряя изменения видимого размера объекта в изображениях LWIR/MWIR, можно определить ориентацию и относительную скорость летательного аппарата 10 относительно местного ориентира.
В одном варианте осуществления, бортовое оборудование не содержит никакого устройства 114 позиционирования. Положение, ориентация и скорость летательного аппарата 10 определяются модулем 113 обработки или главным модулем обработки с использованием информации, предоставленной стереоскопическим видением.
Реферат
Изобретение относится к комбинированному способу для содействия пилотированию и обнаружения стрельбы, а также к бортовому оборудованию для летательного аппарата. Заявленное бортовое оборудование обнаружения стрельбы и содействия пилотированию для летательного аппарата содержит многодатчиковую систему, подающую сигналы, представляющие окружение летательного аппарата. Многодатчиковая система содержит по меньшей мере одну систему, именуемую системой LWIR/MWIR, подающую сигнал, именуемый сигналом LWIR/MWIR, представляющий инфракрасное излучение, лежащее в дальнем инфракрасном или среднем инфракрасном диапазоне; по меньшей мере одну систему, именуемую системой NIR, подающую сигнал, именуемый сигналом NIR, представляющий инфракрасное излучение, лежащее в ближнем инфракрасном диапазоне; и по меньшей мере одну акустическую систему, подающую акустический сигнал. Также бортовое оборудование содержит по меньшей мере один модуль обработки, выполненный с возможностью осуществлять: процедуру содействия пилотированию для получения первой информации о пилотировании, содержащей информацию, представляющую препятствия, присутствующие в окружении летательного аппарата; и процедуру обнаружения стрельбы для получения второй информации о пилотировании, содержащей информацию, представляющую стрельбу вблизи летательного аппарата. Причем процедура содействия пилотированию и процедура обнаружения стрельбы совместно используют сигналы, представляющие окружение летательного аппарата, содержащие по меньшей мере сигнал LWIR/MWIR от одной и той же системы LWIR/MWIR. Бортовое оборудование обнаружения стрельбы и содействия пилотированию выполнено с возможностью получать параметры содействия пилотированию из первой и второй информации о пилотировании. Технический результат – создание единой системы обнаружения стрельбы и содействия пилотированию. 4 н. и 12 з.п. ф-лы, 9 ил.
Комментарии