Способ и система обнаружения транспортных средств, движущихся в направлении встречного движения - RU2734738C2
Код документа: RU2734738C2
Чертежи


Описание
Уровень техники
[0001] Полосы движения на дорогах для движения транспортных средств типично имеют обозначенное направление движения. Транспортное средство, движущееся в направлении, которое отличается от обозначенного направления движения, т.е. во встречном направлении, может быть опасным для транспортного средства, других транспортных средств, пешеходов и/или объектов. Тем не менее, человек-водитель транспортного средства не может распознавать, когда транспортное средство движется во встречном направлении на дороге, либо транспортное средство может не иметь человека-водителя или даже человека-пассажира.
Сущность изобретения
Предлагается способ, содержащий этап, на котором: приводят в действие осветительный прибор первого транспортного средства с возможностью предоставлять обнаруживаемый пользователем шаблон, внешний для первого транспортного средства, при определении того, что первое транспортное средство движется в направлении встречного движения. Причем способ дополнительно содержит этап, на котором приводят в действие осветительный прибор между первым уровнем яркости и вторым уровнем яркости с возможностью предоставлять обнаруживаемый пользователем шаблон. Причем способ дополнительно содержит этап, на котором определяют одно из первого уровня яркости и второго уровня яркости на основе расстояния между первым транспортным средством и вторым транспортным средством. Причем способ дополнительно содержит этап, на котором приводят в действие осветительный прибор между включенным состоянием и отключенным состоянием с возможностью предоставлять обнаруживаемый пользователем шаблон. Причем способ дополнительно содержит этап, на котором приводят в действие осветительный прибор с возможностью предоставлять обнаруживаемый пользователем шаблон на частоте на основе скорости первого транспортного средства. Причем способ дополнительно содержит
этап, на котором приводят в действие осветительный прибор с возможностью предоставлять обнаруживаемый пользователем шаблон на частоте, которая не превышает 60 герц. Причем способ дополнительно содержит этап, на котором приводят в действие осветительный прибор с возможностью предоставлять обнаруживаемый пользователем шаблон при определении того, что местоположение первого транспортного средства представляет собой местоположение с ограниченным доступом. Причем способ дополнительно содержит этап, на котором приводят в действие одно и только одно из передней фары с водительской стороны и передней фары с пассажирской стороны с возможностью предоставлять обнаруживаемый пользователем шаблон. Причем способ дополнительно содержит этап, на котором ограничивают скорость первого транспортного средства первой величиной при определении того, что первое транспортное средство движется в направлении встречного движения. Причем способ дополнительно содержит этап, на котором ограничивают скорость первого транспортного средства второй величиной при определении того, что первое транспортное средство движется в направлении встречного движения в течение порогового количества времени. Причем способ дополнительно содержит этап, на котором завершают приведение в действие осветительного прибора при определении того, что первое транспортное средство более не движется в направлении встречного движения. Причем способ дополнительно содержит этап, на котором определяют то, что транспортное средство движется в направлении встречного движения, на основе информации, принимаемой из навигационной системы. Причем навигационная система представляет собой глобальную систему позиционирования.
Также предлагается компьютер, запрограммированный с возможностью осуществлять предложенный способ.
Также предлагается компьютерно-читаемый носитель, сохраняющий программные инструкции, выполняемые посредством процессора компьютера, чтобы осуществлять предлагаемый способ.
Краткое описание чертежей
[0002] Фиг. 1 является блок-схемой компонентов примерной системы аварийных оповещений о едущих во встречном направлении транспортных средствах.
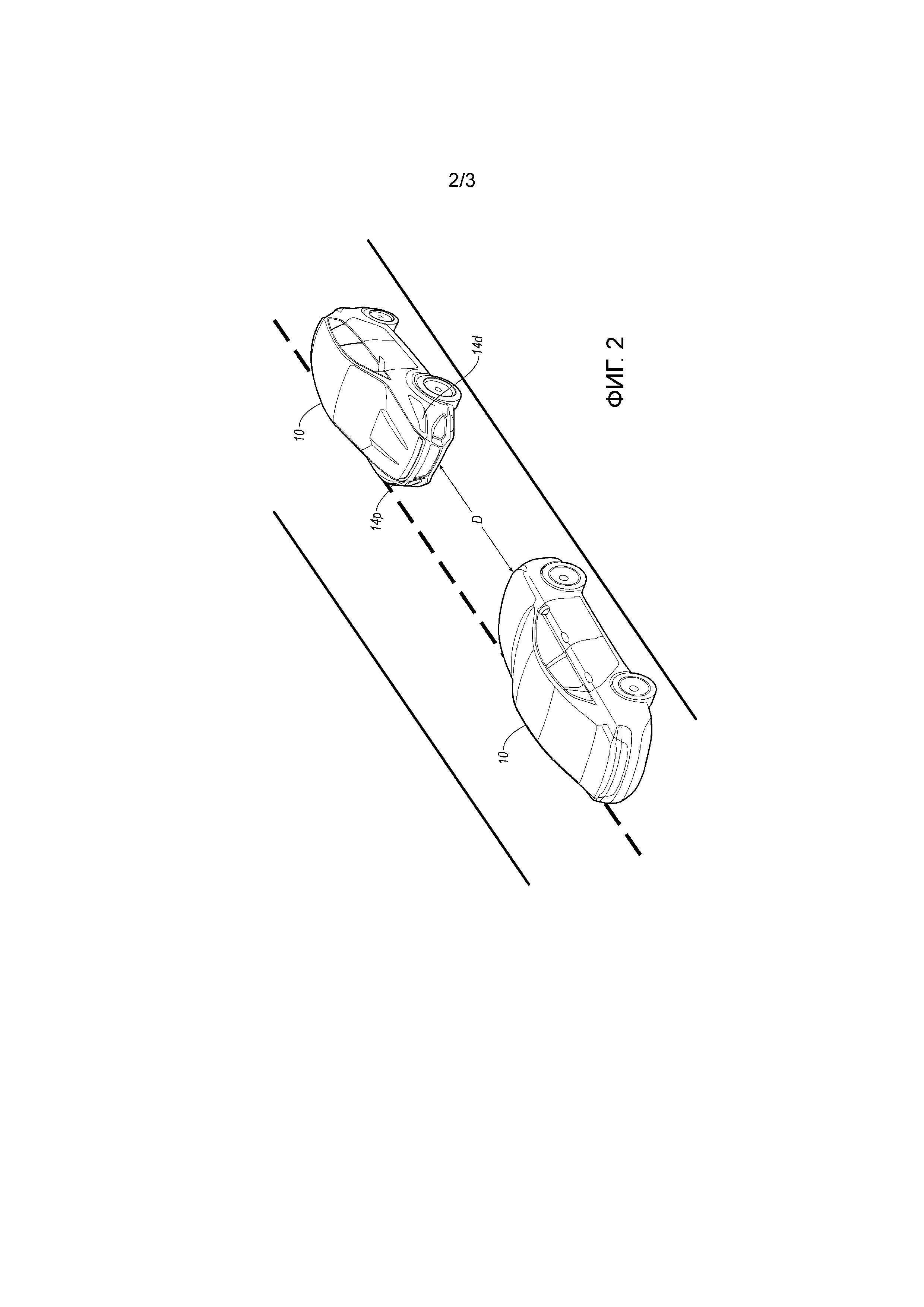
[0003] Фиг. 2 является видом в перспективе примерного транспортного средства, движущегося в направлении встречного движения.
[0004] Фиг. 3 является схемой последовательности операций обработки примерного процесса для управления примерной системой аварийных оповещений о едущих во встречном направлении транспортных средствах по фиг. 1.
Подробное описание изобретения
Введение
[0005] В данном документе раскрыт способ, содержащий приведение в действие осветительного прибора первого транспортного средства с возможностью предоставлять обнаруживаемый пользователем шаблон, внешний для первого транспортного средства, при определении того, что первое транспортное средство движется в направлении встречного движения. Определение того, что транспортное средство движется в направлении встречного движения, может быть основано на информации, принимаемой из навигационной системы. Навигационная система может представлять собой глобальную систему позиционирования.
[0006] Способ дополнительно может содержать приведение в действие осветительного прибора между первым уровнем яркости и вторым уровнем яркости с возможностью предоставлять обнаруживаемый пользователем шаблон. Определение одного из первого уровня яркости и второго уровня яркости может быть основано на расстоянии между первым транспортным средством и вторым транспортным средством.
[0007] Способ дополнительно может содержать приведение в действие осветительного прибора между включенным состоянием и отключенным состоянием с возможностью предоставлять обнаруживаемый пользователем шаблон.
[0008] Способ дополнительно может содержать приведение в действие осветительного прибора с возможностью предоставлять обнаруживаемый пользователем шаблон на частоте на основе скорости первого транспортного средства.
[0009] Способ дополнительно может содержать приведение в действие осветительного прибора с возможностью предоставлять обнаруживаемый пользователем шаблон на частоте, которая не превышает 60 герц.
[0010] Способ дополнительно может содержать приведение в действие осветительного прибора с возможностью предоставлять обнаруживаемый пользователем шаблон при определении того, что местоположение первого транспортного средства представляет собой местоположение с ограниченным доступом.
[0011] Способ дополнительно может содержать приведение в действие одного и только одного из передней фары с водительской стороны и передней фары с пассажирской стороны с возможностью предоставлять обнаруживаемый пользователем шаблон.
[0012] Способ дополнительно может содержать ограничение скорости первого транспортного средства первой величиной при определении того, что первое транспортное средство движется в направлении встречного движения. Способ дополнительно может ограничивать скорость первого транспортного средства второй величиной при определении того, что первое транспортное средство движется в направлении встречного движения в течение порогового количества времени.
[0013] Способ дополнительно может содержать завершение приведения в действие осветительного прибора при определении того, что первое транспортное средство более не движется в направлении встречного движения.
[0014] Также в данном документе раскрыт компьютер, имеющий процессор и запоминающее устройство, запрограммированный с возможностью осуществлять часть или весь раскрытый способ. Также раскрыт компьютерно-читаемый носитель, сохраняющий компьютерно-исполняемые инструкции для того, чтобы осуществлять часть или весь раскрытый способ.
[0015] Также в данном документе раскрыта система, содержащая компьютер, запрограммированный с возможностью приводить в действие осветительный прибор первого транспортного средства с возможностью предоставлять обнаруживаемый пользователем шаблон, внешний для первого транспортного средства, при определении того, что первое транспортное средство движется в направлении встречного движения.
[0016] Компьютер может быть дополнительно запрограммирован с возможностью приводить в действие осветительный прибор между первым уровнем яркости и вторым уровнем яркости с возможностью предоставлять обнаруживаемый пользователем шаблон.
[0017] Компьютер может быть дополнительно запрограммирован с возможностью определять один из первого уровня яркости и второго уровня яркости на основе расстояния между первым транспортным средством и вторым транспортным средством.
[0018] Компьютер может быть дополнительно запрограммирован с возможностью приводить в действие осветительный прибор между включенным состоянием и отключенным состоянием с возможностью предоставлять обнаруживаемый пользователем шаблон.
[0019] Компьютер может быть дополнительно запрограммирован с возможностью приводить в действие осветительный прибор с возможностью предоставлять обнаруживаемый пользователем шаблон на частоте на основе скорости первого транспортного средства.
[0020] Компьютер может быть дополнительно запрограммирован с возможностью приводить в действие осветительный прибор с возможностью предоставлять обнаруживаемый пользователем шаблон на частоте, которая не превышает 60 герц.
[0021] Компьютер может быть дополнительно запрограммирован с возможностью приводить в действие осветительный прибор с возможностью предоставлять обнаруживаемый пользователем шаблон при определении того, что местоположение первого транспортного средства представляет собой местоположение с ограниченным доступом.
[0022] Компьютер может быть дополнительно запрограммирован с возможностью приводить в действие одно и только одно из передней фары с водительской стороны и передней фары с пассажирской стороны с возможностью предоставлять обнаруживаемый пользователем шаблон.
[0023] Компьютер может быть дополнительно запрограммирован с возможностью ограничивать скорость первого транспортного средства первой величиной при определении того, что первое транспортное средство движется в направлении встречного движения.
[0024] Компьютер может быть дополнительно запрограммирован с возможностью ограничивать скорость первого транспортного средства второй величиной при определении того, что первое транспортное средство движется в направлении встречного движения в течение порогового количества времени.
[0025] Со ссылкой на фиг. 1, на котором аналогичные номера указывают аналогичные части на нескольких видах, система 8 предоставляет решение проблемы обнаружения транспортных средств, движущихся во встречном направлении на дороге. Система 8 включает в себя транспортное средство 10, которое, в свою очередь, включает в себя компьютер 12, запрограммированный с возможностью обнаруживать то, что транспортное средство 10 движется во встречном направлении на дороге. Компьютер 12 может приводить в действие осветительный прибор 14 транспортного средства 10 с возможностью предоставлять обнаруживаемый пользователем шаблон, внешний для транспортного средства 10, при определении того, что транспортное средство 10 движется в направлении встречного движения. Транспортное средство 10 может обмениваться данными с пользовательским устройством 16 и серверным компьютером 18, например, непосредственно и/или через сеть 20.
[0026] При использовании в данном документе, "во встречном направлении" означает движение в направлении, которое отличается от обозначенного направления движения для полосы движения транспортного средства.
[0027] При использовании в данном документе, термин "обнаруживаемый пользователем шаблон" представляет собой шаблон приведения в действие осветительного прибора, который является обнаруживаемым человеком за пределами транспортного средства 10, но в пределах порогового расстояния транспортного средства 10, например, 100 ярдов, без помощи механизированных средств, расширяющих технические возможности, например, светочувствительных датчиков, камер и т.д., т.е. обнаруживаемый пользователем шаблон является обнаруживаемым среднестатистическим открытым человеческим глазом.
[0028] В нижеприведенном описании, взаимные ориентации и направления (в качестве примера, слева, справа) приводятся с точки обзора пассажира, сидящего в водительском сиденье и обращенного к приборной панели транспортного средства 10.
Система
[0029] Сеть 20 (иногда называемая "глобальной вычислительной сетью", поскольку она может включать в себя связь между устройствами, которые являются географически удаленными, т.е. не в идентичном здании, транспортном средстве и т.д., друг от друга) представляет один или более механизмов, посредством которых удаленные устройства могут обмениваться данными между собой, например, между серверным компьютером 18, транспортным средством 10, пользовательским устройством 16 и/или другими вычислительными устройствами. Соответственно, сеть 20 может представлять собой один или более механизмов проводной или беспроводной связи, включающих в себя любую требуемую комбинацию механизмов проводной (например, кабельной и волоконной) и/или беспроводной (например, сотовой, беспроводной, спутниковой, микроволновой и радиочастотной) связи и любую требуемую топологию сети (либо топологии, когда используются несколько механизмов связи). Примерные сети связи включают в себя сети беспроводной связи (например, с использованием Bluetooth, IEEE 802.11 и т.д.), локальные вычислительные сети (LAN) и/или глобальные вычислительные сети (WAN), включающие в себя Интернет, предоставляющие услуги обмена данными.
[0030] Серверный компьютер 18 представляет собой вычислительное устройство, которое включает в себя аппаратные средства, например, схемы, кристаллы, антенну и т.д., запрограммированные с возможностью передавать, принимать и обрабатывать информацию в/из транспортного средства 10, пользовательских устройств 16, других серверных компьютеров и т.д., например, через сеть 20. Серверный компьютер 18 может представлять собой один или более компьютеров, каждый из которых, в общем, включает в себя, по меньшей мере, один процессор и, по меньшей мере, одно запоминающее устройство, реализованное так, как описано в данном документе, причем запоминающее устройство сохраняет инструкции, выполняемые посредством процессора, включающие в себя инструкции для выполнения различных этапов и процессов, описанных в данном документе. Серверный компьютер 18 может включать в себя или функционально соединяться с хранилищем данных для сохранения собранных данных, таблиц поиска, виртуальной карты и т.д.
[0031] Пользовательское устройство 16 может представлять собой любое из множества вычислительных устройств, реализованных через схемы, кристаллы, антенну или другие электронные компоненты, и типично представляет собой портативное или носимое пользовательское устройство, например, смартфон, планшетный компьютер, персональное цифровое устройство и т.д. Пользовательское устройство включает в себя пользовательский интерфейс, который представляет информацию и принимает информацию от пользователя пользовательского устройства 16. Пользовательский интерфейс может включать в себя сенсорный экран отображения, динамики, микрофон и т.д. Пользовательское устройство 16 может обмениваться данными с компьютером 12 транспортного средства, серверным компьютером 18 и т.д., непосредственно и/или косвенно, например, через сеть 20.
[0032] Транспортное средство 10 может включать в себя любой пассажирский или коммерческий автомобиль, к примеру, легковой автомобиль, грузовик, полноприводное внедорожное транспортное средство, транспортное средство типа "кроссовер", фургон, минифургон, такси, автобус и т.д. В некоторых возможных подходах, транспортное средство 10 представляет собой автономное транспортное средство, которое может работать в автономном (например, без водителя) режиме, частично автономном режиме и/или неавтономном режиме. Транспортное средство 10 может включать в себя осветительный прибор 14, тягу 22, тормозную систему 24, навигационную систему 26, пользовательский интерфейс 28, датчики 30, приемо-передающее устройство 32, сеть 34 связи и компьютер 12 транспортного средства.
[0033] Осветительный прибор 14 включает в себя конструкцию для формирования света, которая преобразует электричество в видимый свет, такую как вольфрамовый катод прямого накала, металлогалоидная лампа, светоизлучающий диод и т.д. Осветительный прибор 14 включает в себя различные схемы, кристаллы, электропроводку или другие электронные компоненты, чтобы предоставлять управление яркостью осветительного прибора 14, например, в ответ на команду, принимаемую через сеть 34 связи, и/или изменение мощности, предоставляемой в осветительный прибор 14, например, изменение напряжения. Осветительный прибор 14 может размещаться, например, в корпусе, включающем в себя отражатель и линзу. Примерные осветительные приборы 14 включают в себя передние фары, сигналы поворота и т.д. Осветительный прибор 14 может быть расположен на конкретной стороне транспортного средства 10, например, передняя фара 14d с водительской стороны и передняя фара 14p с пассажирской стороны. При использовании в данном документе, "водительская сторона" представляет собой сторону транспортного средства 10, с которой сидит водитель, например, правую сторону для типичных транспортных средств, изготовленных в Соединенных Штатах. "Пассажирская сторона" представляет собой сторону, противоположную водительской стороне, например, левую сторону для типичных транспортных средств, изготовленных в Соединенных Штатах.
[0034] Тяга 22 транспортного средства преобразует накопленную энергию в движение транспортного средства 10. Тяга 22 может представлять собой известную тяговую подсистему транспортного средства, например, традиционную силовую передачу, включающую в себя двигатель внутреннего сгорания, соединенный с трансмиссией, которая переносит вращательное движение на колеса; электрическую силовую передачу, включающую в себя аккумуляторы, электромотор и трансмиссию, которая переносит вращательное движение на колеса; гибридную силовую передачу, включающую в себя элементы традиционной силовой передачи и электрической силовой передачи; или любой другой тип тяги. Тяга 22 поддерживает связь и принимает ввод из компьютера 12 и от водителя-человека. Водитель-человек может управлять тягой 22, например, через педаль акселератора и/или рычаг переключения передач.
[0035] Тормозная система 24 может представлять собой известную тормозную подсистему транспортного средства, которая сопротивляется движению транспортного средства 10, чтобы за счет этого замедлять и/или останавливать транспортное средство 10. Тормозная система 24 может представлять собой фрикционные тормоза, к примеру, дисковые тормоза, барабанные тормоза, ленточные тормоза и т.д.; рекуперативные тормоза; любой другой подходящий тип тормозов; либо комбинацию. Тормозная система 24 может включать в себя электронный модуль управления (ECU) и т.п., который приводит в действие тормозную систему 24, чтобы сопротивляться движению транспортного средства 10, например, в ответ на команду из компьютера 12 и/или от водителя-человека. Водитель-человек может управлять тормозной системой 24, например, через педаль тормоза.
[0036] Навигационная система 26 реализуется через схемы, кристаллы или другие электронные компоненты, которые могут определять текущее местоположение транспортного средства 10. Навигационная система 26 может реализовываться через спутниковую систему, к примеру, глобальную систему позиционирования (GPS). Навигационная система 26 может триангулировать местоположение транспортного средства 10 на основе сигналов, принимаемых из различных спутников на земной орбите. Навигационная система 26 запрограммирована с возможностью выводить сигналы, представляющие текущее местоположение транспортного средства 10, например, в компьютер 12 через сеть 34 связи. В некоторых случаях, навигационная система 26 запрограммирована с возможностью определять маршрут из текущего местоположения в будущее местоположение, что включает в себя разработку альтернативных маршрутов, например, если дорога закрыта. Навигационная система 26 может осуществлять доступ к виртуальной карте, сохраненной в запоминающем устройстве транспортного средства 10 (пояснено ниже), локально в навигационной системе 26, в серверном компьютере 18 и т.д., и разрабатывать маршрут согласно виртуальной карте. Виртуальная карта может включать в себя полосы движения, ограничения скорости для таких полос движения и обозначенное направление движения в полосах движения, для различных дорог, шоссе, проездов, автострад и т.д.
[0037] Пользовательский интерфейс 28 представляет информацию и принимает информацию от пассажира транспортного средства 10. Пользовательский интерфейс 28 может быть расположен, например, на приборной панели в пассажирском салоне транспортного средства или в любом месте, где он может легко наблюдаться пассажиром. Пользовательский интерфейс 28 может включать в себя круговые ручки регулировки, цифровые показания, экраны, к примеру, сенсорный экран отображения, динамики и т.д. для предоставления информации пассажиру, например, элементы человеко-машинного интерфейса (HMI). Пользовательский интерфейс 28 может включать в себя кнопки, ручки, клавишные панели, микрофон и т.д. для приема информации от пассажира.
[0038] Датчики 30 могут обнаруживать внутренние состояния транспортного средства 10, например, скорость колеса, ориентацию колеса и переменные параметры двигателя и трансмиссии. Датчики 30 могут обнаруживать позицию или ориентацию транспортного средства 10, например, датчики на основе глобальной системы позиционирования (GPS); акселерометры, к примеру, пьезоэлектрические датчики или датчики на основе микроэлектромеханических систем (MEMS); гироскопы, к примеру, кольцевой лазер на основе скорости вращения или волоконно-оптические гироскопы; блоки инерциальных измерений (IMU); и магнитометры. Датчики 30 могут обнаруживать внешний мир, например, радарные датчики, сканирующие лазерные дальномеры, (лидарные) устройства на основе оптического обнаружения и дальнометрии и датчики обработки изображений, к примеру, камеры. Датчики 30 могут включать в себя устройства связи, например, устройства связи между транспортным средством и инфраструктурой (V2I) или между транспортными средствами (V2V).
[0039] Приемо-передающее устройство 32 передает и принимает информацию в беспроводном режиме из других приемо-передающих устройств, непосредственно или через сеть 20, обеспечивая обмен сигналами, данными и другой информацией с другими компьютерными и сетевыми системами, например, с серверным компьютером 18, пользовательским устройством 16 и т.д. Приемо-передающее устройство 32 реализуется через антенны, схемы, кристаллы или другие электронные компоненты, которые могут упрощать беспроводную связь. Примерные приемо-передающие устройства включают в себя Wi-Fi-системы, радиопередающие и приемные устройства, системы связи, Bluetooth®-системы, системы сотовой связи и мобильные спутниковые приемо-передающие устройства.
[0040] Сеть 34 связи включает в себя аппаратные средства, к примеру, шину связи, для упрощения связи между компонентами транспортного средства. Сеть 34 связи может упрощать проводную или беспроводную связь между компонентами транспортного средства в соответствии с определенным числом протоколов связи, таких как контроллерная сеть (CAN), Ethernet, Wi-Fi, локальная соединительная сеть (LIN) и/или другие проводные или беспроводные механизмы.
[0041] Компьютер 12 транспортного средства, реализованный через схемы, кристаллы или другие электронные компоненты, включен в транспортное средство 10 для выполнения различных операций и процессов, включающих в себя операции и процессы, как описано в данном документе. Компьютер 12 транспортного средства представляет собой вычислительное устройство, которое, в общем, включает в себя процессор и запоминающее устройство, причем запоминающее устройство включает в себя одну или более форм компьютерно-читаемых носителей и сохраняет инструкции, выполняемые посредством процессора для выполнения различных операций, в том числе раскрытых в данном документе. Запоминающее устройство компьютера 12 транспортного средства, в общем, дополнительно сохраняет удаленные данные, принятые с помощью различных механизмов связи; например, компьютер 12 транспортного средства, в общем, выполнен с возможностью связи по шине контроллерной сети (CAN) и т.п. и/или с возможностью использования других проводных или беспроводных протоколов, например, Bluetooth и т.д. Через сеть 34 связи с использованием Ethernet, Wi-Fi, CAN-шины, локальной соединительной сети (LIN) и/или других проводных или беспроводных механизмов, компьютер 12 транспортного средства может передавать сообщения в различные устройства в транспортном средстве 10 и/или принимать сообщения из различных устройств, например, контроллеров, актуаторов, датчиков и т.д., например, контроллеров и датчиков, как пояснено в данном документе. Например, компьютер 12 транспортного средства может принимать данные из датчиков транспортного средства 30. Хотя один компьютер 12 транспортного средства показан на фиг. 1 для простоты иллюстрации, следует понимать, что компьютер 12 транспортного средства может включать в себя, и различные операции, описанные в данном документе, могут выполняться посредством одного или более вычислительных устройств.
[0042] Компьютер 12 транспортного средства запрограммирован с возможностью приводить в действие один или более осветительных приборов 14 транспортного средства 10 с возможностью предоставлять обнаруживаемый пользователем шаблон, внешний для транспортного средства 10, при определении того, что транспортное средство 10 движется в направлении встречного движения.
[0043] Компьютер 12 может определять то, что транспортное средство 10 движется в направлении встречного движения, на основе информации, принимаемой из навигационной системы 26, информации, принимаемой из датчиков 30, информации, принимаемой через приемо-передающее устройство 32 и т.д., в том числи и на основе комбинаций вышеозначенного. Например, информация из навигационной системы 26 может указывать то, что транспортное средство 10 движется в направлении, отличном, например, противоположном обозначенному направлению движения для полосы движения, в которой находится транспортное средство 10, например, на основе сравнения местоположения и направления движения транспортного средства 10, например, как определено посредством навигационной системы 26, с виртуальной картой, включающей в себя обозначенное направление движения, например, сохраненной в навигационной системе 26. Информация из датчиков 30 может указывать то, что транспортное средство 10 движется в направлении встречного движения, например, информация, принимаемая посредством компьютера 12 из камеры, может анализироваться, например, с использованием известных технологий, чтобы идентифицировать индикаторы в захваченных изображениях из камеры, например, заднюю сторону вывески с названием улицы, ориентацию припаркованных транспортных средств на обочине дороги и т.д. Информация, принимаемая через приемо-передающее устройство 32, может включать в себя информацию, указывающую то, что транспортное средство 10 движется во встречном направлении, например, информацию, передаваемую из уличного радарного датчика скорости, камеры на перекрестке и контроллера, другого транспортного средства 10 и т.д., например, передаваемую через сеть 20.
[0044] Компьютер 12 может приводить в действие осветительный прибор 14 с возможностью предоставлять обнаруживаемый пользователем шаблон посредством отправки команды в осветительный прибор 14, например, через сеть 34 связи, инструктирующей такое приведение в действие. Компьютер 12 может приводить в действие осветительный прибор 14 посредством управления потоковым электричеством, предоставленным в осветительный прибор 14, в том числе характеристиками такого электричества, например, предоставляемым напряжением (фактическим и/или кажущимся), например, при том, что более высокое напряжение формирует более яркий свет.
[0045] Компьютер 12 может приводить в действие осветительный прибор 14 между первым уровнем яркости, например, 700 люменов и вторым уровнем яркости, например, 800 люменов с возможностью предоставлять обнаруживаемый пользователем шаблон. Варьирование между первым и вторым уровнем яркости является достаточным для обнаружения человеком, внешним по отношению к транспортному средству 10, например, по меньшей мере, 10%-е варьирование между первым и вторым уровнями яркости.
[0046] Компьютер 12 может определять первый уровень яркости и/или второй уровень яркости на основе расстояния D между транспортным средством 10 и другим транспортным средством 10 (см. фиг. 2). Расстояние D между транспортным средством 10 и другим транспортным средством 10 может определяться посредством компьютера 12 на основе информации, принимаемой из датчиков 30, например, информации, принимаемой из радарных датчиков, сканирующих лазерных дальномеров, (лидарных) устройств на основе оптического обнаружения и дальнометрии и т.д. Определенное расстояние D между транспортным средством 10 и другим транспортным средством 10 может использоваться посредством компьютера 12 в комбинации с таблицей поиска, коррелирующей различные расстояния с различными первым и/или вторым уровнями яркости, например, при том, что большие расстояния коррелируются с большим варьированием между первым и вторым уровнями яркости, более высоким уровнем яркости для первого и/или второго уровней яркости и т.д. Таблица поиска может сохраняться локально и/или удаленно, например, в компьютере 12 транспортного средства и/или в серверном компьютере 18.
[0047] Компьютер 12 может приводить в действие осветительный прибор 14 между включенным состоянием и отключенным состоянием с возможностью предоставлять обнаруживаемый пользователем шаблон. Включенное состояние представляет собой состояние, в котором осветительный прибор 14 формирует достаточное количество света для обнаружения человеком, внешним по отношению к транспортному средству 10, например, 700 люменов, в пределах порогового расстояния, например, 100 ярдов. Отключенное состояние представляет собой состояние, в котором осветительный прибор 14 практически не предоставляет обнаруживаемый пользователем свет.
[0048] Компьютер 12 может приводить в действие осветительный прибор 14 с возможностью предоставлять обнаруживаемый пользователем шаблон на частоте на основе скорости транспортного средства 10. Частота обнаруживаемого пользователем шаблона представляет собой частоту, с которой осветительный прибор 14 приводится в действие, например, между первым и вторым уровнями яркости и/или включенным и отключенным состояниями. Скорость транспортного средства 10 может определяться посредством компьютера 12 на основе информации из датчиков 30, например, информации из датчиков скорости вращения колес. Определенная скорость может использоваться посредством компьютера 12 в комбинации с таблицей поиска и т.п., например, сохраненной локально в запоминающем устройстве компьютера 12 и/или удаленно, коррелирующей различные скорости с различными частотами приведения в действие, например, при том, что более высокие скорости коррелируются с более высокими значениями частоты приведения в действие. Компьютер 12 может ограничивать максимальную частоту приведения в действие осветительного прибора 14, например, ограничивать приведение в действие между первым и вторым уровнями яркости и/или включенным и отключенным состояниями таким образом, что она не превышает частоту, которая, как определено, должна наблюдаться человеком как установившийся свет, например, 60 герц.
[0049] Компьютер 12 может приводить в действие конкретный осветительный прибор 14 транспортного средства 10, к примеру, одно и только одно из передней фары 14d с водительской стороны и передней фары 14p с пассажирской стороны с возможностью предоставлять обнаруживаемый пользователем шаблон. Определение того, какой осветительный прибор 14 следует приводить в действие, может быть основано на информации, принимаемой из навигационной системы 26, например, чтобы приводить в действие осветительный прибор 14, ближайший к смежной полосе движения.
[0050] Компьютер 12 может приводить в действие осветительный прибор 14 с возможностью предоставлять обнаруживаемый пользователем шаблон при определении того, что местоположение транспортного средства 10 представляет собой местоположение с ограниченным доступом. При использовании в данном документе, "местоположение с ограниченным доступом" представляет собой географическую область, обозначенную таким образом. Например, различные заданные географические области и ассоциированные ограниченные обозначения могут сохраняться в навигационной системе 26, компьютере 12, серверном компьютере 18 и т.д., например, в качестве части виртуальной карты. Географическая область, обозначенная в качестве местоположения с ограниченным доступом, может определяться посредством изготовителя транспортного средства 10, например, включаться в виртуальную карту, сохраненную в навигационной системе 26, например, задаваться посредством границ частной собственности, государственных местоположений с ограниченным доступом, местоположений не на дороге и т.д., и/или может определяться пользователем транспортного средства 10, например, на основе ввода в пользовательский интерфейс 28, пользовательское устройство 16 и т.д. и передаваться в компьютер 12, навигационную систему 26, серверный компьютер 18.
[0051] В дополнение к приведению в действие осветительного прибора 14, компьютер 12 может ограничивать скорость транспортного средства 10 при определении того, что транспортное средство 10 движется в направлении встречного движения. Чтобы ограничивать скорость, компьютер 12 может передавать команду, например, через сеть 34 связи, в тягу 22, инструктирующую тяге 22 ограничивать выходную модность. Дополнительно или альтернативно, компьютер 12 может передавать команду в тормозную систему 24, чтобы приводить ее в действие с возможностью ограничивать скорость транспортного средства 10. Величина, которой ограничена скорость, например, максимальной скоростью 25 миль в час, может определяться посредством изготовителя транспортного средства 10, например, сохраняться в компьютере 12. Величина, которой ограничена скорость, может определяться на основе скорости трафика во встречном направлении движения, например, других транспортных средств, находящихся в идентичной полосе движения с транспортным средством 10 и движущихся в обозначенном направлении движения. Например, величина, которой ограничена скорость, может составлять процент скорости трафика во встречном направлении движения, например, 50%. В качестве другого примера, величина, которой ограничена скорость, может идентифицироваться с помощью таблицы поиска и т.п., например, сохраненной в запоминающем устройстве компьютера 12, включающей в себя коррелированные скорости трафика во встречном направлении движения с пределами скорости транспортного средства 10, движущегося в направлении встречного движения. Компьютер 12 может определять скорость трафика во встречном направлении движения на основе информации, принимаемой из датчиков 30, например, лидарного устройства, и/или на основе информации из навигационной системы 26, например, ограничение скорости, включенное в виртуальную карту для полосы движения едущего во встречном направлении транспортного средства 10, может идентифицироваться в качестве скорости трафика во встречном направлении движения.
[0052] Компьютер 12 может ограничивать скорость транспортного средства 10 второй величиной при определении того, что транспортное средство 10 движется в направлении встречного движения в течение порогового количества времени, например, 10 секунд. Скорость может быть ограничена, как пояснено выше. Вторая величина, например, максимальная скорость 15 миль в час, может быть ниже скорости, которой транспортное средство 10 первоначально ограничено при определении того, что транспортное средство 10 движется в направлении встречного движения. Вторая величина, которой ограничена скорость, может определяться посредством изготовителя транспортного средства 10, например, сохраняться в компьютере 12 и/или на основе скорости трафика во встречном направлении движения, как описано выше. Пороговое количество времени, например, 30 секунд, может определяться посредством изготовителя транспортного средства 10 и/или на основе скорости трафика во встречном направлении движения. Например, пороговое количество времени может идентифицироваться посредством компьютера 12 с помощью таблицы поиска и т.п., в том числе, например, сохраненной в запоминающем устройстве компьютера 12, коррелирующей скорости трафика во встречном направлении движения с пороговым количеством времени.
Примерный процесс
[0053] Фиг. 3 является схемой последовательности операций обработки, иллюстрирующей примерный процесс 300 для управления транспортным средством 10, чтобы предоставлять обнаружение движения во встречном направлении. Процесс 300 начинается на этапе 305, когда питание транспортного средства 10 включается, или оно иным способом переводится в рабочее состояние. Этапы процесса 300 могут выполняться посредством процессора, согласно программированию, сохраненному в запоминающем устройстве, компьютера 12.
[0054] На этапе 305, компьютер 12 собирает данные и информацию из других компонентов транспортного средства, например, навигационной системы 26, датчиков 30, приемо-передающего устройства 32 и т.д., через сеть 34 связи. Компьютер 12 может продолжать собирать данные в течение всего процесса 300, например, в то время, когда транспортное средство 10 работает.
[0055] После этого, на этапе 310, компьютер 12 определяет то, движется или нет транспортное средство 10 в направлении встречного движения, например, на основе информации и данных, собранных из навигационной системы 26, датчиков 30, приемо-передающего устройства 32 и т.д., как описано в данном документе. Когда компьютер 12 определяет то, что транспортное средство 10 не движется в направлении встречного движения, процесс 300 переходит к этапу 315. Когда компьютер 12 определяет то, что транспортное средство 10 движется в направлении встречного движения, процесс 300 переходит к этапу 325.
[0056] На этапе 315, компьютер 12 определяет то, находится или нет транспортное средство 10 в местоположении с ограниченным доступом, например, на основе информации, принимаемой из навигационной системы 26 через сеть 34 связи. Когда компьютер 12 определяет то, что транспортное средство 10 находится в местоположении с ограниченным доступом, процесс 300 переходит к этапу 320. Когда компьютер 12 определяет то, что транспортное средство 10 не находится в местоположении с ограниченным доступом, процесс 300 возвращается к этапу 305.
[0057] На этапе 320, компьютер 12 приводит в действие осветительный прибор 14, например, посредством передачи команды в осветительный прибор 14 через сеть 34 связи. После этапа 320, процесс 300 завершается. Альтернативно, после этапа 320, процесс 300 может возвращаться к этапу 305, при этом процесс 300 продолжает выполняться до тех пор, пока питание транспортного средства 10 не будет выключено, или оно не будет переведено иным способом в нерабочее состояние, либо до тех пор, пока компьютеру 12 не будет инструктировано завершать процесс 300, например, в ответ на пользовательский ввод в пользовательский интерфейс 28.
[0058] На этапе 325, компьютер 12 определяет расстояние до другого транспортного средства 10, например, на основе информации, принимаемой из датчиков 30, например, лидаров, радарных дальномеров и т.д., через сеть 34 связи.
[0059] На этапе 330, компьютер 12 определяет скорость транспортного средства 10, например, на основе информации, принимаемой из датчиков 30, например, датчика скорости вращения колес и/или навигационной системы 26, через сеть 34 связи.
[0060] На этапе 335, компьютер 12 приводит в действие осветительный прибор 14, например, посредством передачи команды в осветительный прибор 14 через сеть 34 связи. Компьютер 12 может определять характеристики приведения в действие, например, уровни яркости, значения частоты приведения в действие и т.д., по меньшей мере, на основе расстояния до другого транспортного средства 10 и/или скорости транспортного средства 10, как описано в данном документе.
[0061] На этапе 340, компьютер 12 ограничивает скорость транспортного средства 10 первой величиной, например, посредством передачи команды в тягу 22 и/или тормозную систему 24 через сеть 34 связи.
[0062] После этого, на этапе 345, компьютер 12 определяет то, движется или нет транспортное средство 10 по-прежнему в направлении встречного движения после того, как пороговое количество времени истекло, например, с момента определения движения во встречном направлении на этапе 310, с момента приведения в действие осветительного прибора 14 или с момента ограничения скорости транспортного средства 10 первой величиной. Когда компьютер 12 определяет то, что транспортное средство 10 по-прежнему движется в направлении встречного движения, процесс 300 переходит к этапу 350. Когда компьютер 12 определяет то, что транспортное средство 10 более не движется в направлении встречного движения, процесс 300 переходит к этапу 355.
[0063] На этапе 350, компьютер 12 ограничивает скорость транспортного средства 10 второй величиной. После этапа 350, процесс 300 завершается. Альтернативно, после этапа 350, процесс 300 может возвращаться к этапу 305, при этом процесс 300 продолжает выполняться до тех пор, пока питание транспортного средства 10 не будет выключено, или оно не будет переведено иным способом в нерабочее состояние, либо до тех пор, пока компьютеру 12 не будет инструктировано завершать процесс 300, например, в ответ на пользовательский ввод в пользовательский интерфейс 28.
[0064] На этапе 355, компьютер 12 прекращает приведение в действие осветительного прибора 14, например, посредством передачи команды в осветительный прибор 14 через сеть 34 связи. После этапа 355, процесс 300 завершается. Альтернативно, после этапа 355, компьютер 12 может возвращаться к этапу 305, при этом процесс продолжает выполняться до тех пор, пока питание транспортного средства 10 не будет выключено, или оно не будет переведено иным способом в нерабочее состояние, либо до тех пор, пока компьютеру 12 не будет инструктировано завершать процесс 300, например, в ответ на пользовательский ввод в пользовательский интерфейс 28.
Заключение
[0065] Вычислительные устройства, в общем, включают в себя компьютерно-исполняемые инструкции, причем инструкции могут выполняться посредством одного или более вычислительных устройств, таких как вычислительные устройства, упомянутые выше. Компьютерно-исполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения, отдельно или в комбинации, Java™, C, C++, Visual Basic, Java Script, Perl и т.д. Некоторые из этих вариантов применения могут быть компилированы и выполнены на виртуальной машине, такой как виртуальная машина Java, виртуальная машина Dalvik и т.п. В общем, процессор (например, микропроцессор) принимает инструкции, например, из запоминающего устройства, компьютерно-читаемого носителя и т.д. и выполняет эти инструкции, за счет этого выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут сохраняться и передаваться с использованием множества компьютерно-читаемых носителей.
[0066] Компьютерно-читаемый носитель (также называемый процессорночитаемым носителем) включает в себя любой энергонезависимый (например, материальный) носитель, который участвует в предоставлении данных (например, инструкций), которые могут считываться посредством компьютера (например, посредством процессора компьютера). Такой носитель может принимать множество форм, включающих в себя, но не только, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители могут включать в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители могут включать в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основное запоминающее устройство. Такие инструкции могут передаваться посредством одной или более сред передачи, включающих в себя коаксиальные кабели, медный провод и оптоволокно, включающее в себя провода, которые содержат системную шину, соединенную с процессором компьютера. Общие формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфокарты, бумажную ленту, любую другую физическую среду с шаблонами отверстий, RAM, PROM, EPROM, флэш-EEPROM, любой другой кристалл или картридж запоминающего устройства либо любой другой носитель, с которого компьютер может выполнять считывание.
[0067] Базы данных, репозитории данных или другие хранилища данных, описанные в данном документе, могут включать в себя различные виды механизмов для сохранения, осуществления доступа и извлечения различных видов данных, включающих в себя иерархическую базу данных, набор файлов в файловой системе, базу данных приложений в собственном формате, систему управления реляционными базами данных (RDBMS) и т.д. Каждое такое хранилище данных, в общем, включается в вычислительное устройство с использованием компьютерной операционной системы, к примеру, одной из компьютерных операционных систем, упомянутых выше, и является доступным через сеть любым одним или более из множества способов. Файловая система может быть доступной из компьютерной операционной системы и может включать в себя файлы, сохраненные в различных форматах. RDBMS, в общем, использует язык структурированных запросов (SQL) в дополнение к языку для создания, сохранения, редактирования и выполнения хранимых процедур, к примеру, вышеуказанному языку PL/SQL.
[0068] В некоторых примерах, системные элементы могут реализовываться как компьютерно-читаемые инструкции (например, программное обеспечение) на одном или более вычислительных устройств (например, серверов, персональных компьютеров и т.д.), сохраненные на компьютерно-читаемых носителях, ассоциированных с ними (например, на дисках, в запоминающих устройствах и т.д.). Компьютерный программный продукт может содержать такие инструкции, сохраненные на компьютерно-читаемых носителях, для выполнения функций, описанных в данном документе.
[0069] Прилагательные "первый" и "второй" используются в этом документе в качестве идентификаторов и не имеют намерение обозначать значимость или порядок.
[0070] Относительно носителей, процессов, систем, способов и т.д., описанных в данном документе, следует понимать, что хотя этапы таких процессов и т.д. описаны как осуществляемые согласно определенной упорядоченной последовательности, такие процессы могут осуществляться на практике с описанными этапами, выполняемыми в порядке, отличном от порядка, описанного в данном документе. Дополнительно следует понимать, что определенные этапы могут выполняться одновременно, что другие этапы могут добавляться, или что определенные этапы, описанные в данном документе, могут опускаться. Другими словами, описания систем и/или процессов в данном документе предоставляются в целях иллюстрации конкретных вариантов осуществления и никоим образом не должны истолковываться как ограничивающие раскрытый предмет изобретения.
[0071] Раскрытие сущности описано иллюстративным способом, и следует понимать, что терминология, которая использована, предназначена в силу характера для описания, а не для ограничения. В свете вышеуказанных идей, возможно множество модификаций и варьирований настоящего раскрытия сущности, и раскрытие сущности может осуществляться на практике иным образом относительно того, что конкретно описано.
Реферат
Группа изобретений относится к транспортным средствам. Система обнаружения транспортных средств, движущихся в направлении встречного движения, содержит компьютер, запрограммированный для управления приведением в действие осветительного прибора первого транспортного средства, чтобы предоставлять обнаруживаемый пользователем шаблон, внешний для первого транспортного средства, при определении в первом транспортном средстве, что первое транспортное средство движется в направлении встречного движения. Определение в первом транспортном средстве, что первое транспортное средство движется в направлении встречного движения, основано на по меньшей мере одном из данных навигационной системы первого транспортного средства и данных камеры первого транспортного средства. Достигается повышение безопасности движения за счет обнаружения транспортных средств, движущихся в направлении встречного движения, и приведения в действие осветительного прибора транспортного средства. 2 н. и 18 з.п. ф-лы, 3 ил.
Комментарии