Система и программа проводки по маршруту - RU2400710C1
Код документа: RU2400710C1
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к системам и программам проводки по маршруту.
Уровень техники
В известных навигационных устройствах, когда водитель вводит место назначения и устанавливает условия поиска, обработка поиска маршрута выполняется на основе условий поиска, в результате чего на основе данных карты находят маршрут от исходного пункта, который указывается местоположением проводимого транспортного средства, до места назначения. Кроме того, маршрут, который был найден, то есть найденный маршрут, отображается вместе с местоположением проводимого транспортного средства на экране с картой, который формируется в блоке отображения, и транспортное средство проводится по найденному маршруту, то есть выполняется проводка по маршруту. Тем самым, водителю предоставляется возможность провести транспортное средство по найденному отображенному маршруту.
Однако при прохождении через перекресток на найденном маршруте в случае, когда дорога, образующая найденный маршрут, имеет множество полос, на заранее определенном экране, который формируется в блоке отображения, отображается список полос, служащий в качестве карты проводки по полосам (смотри, например, патентный документ 1).
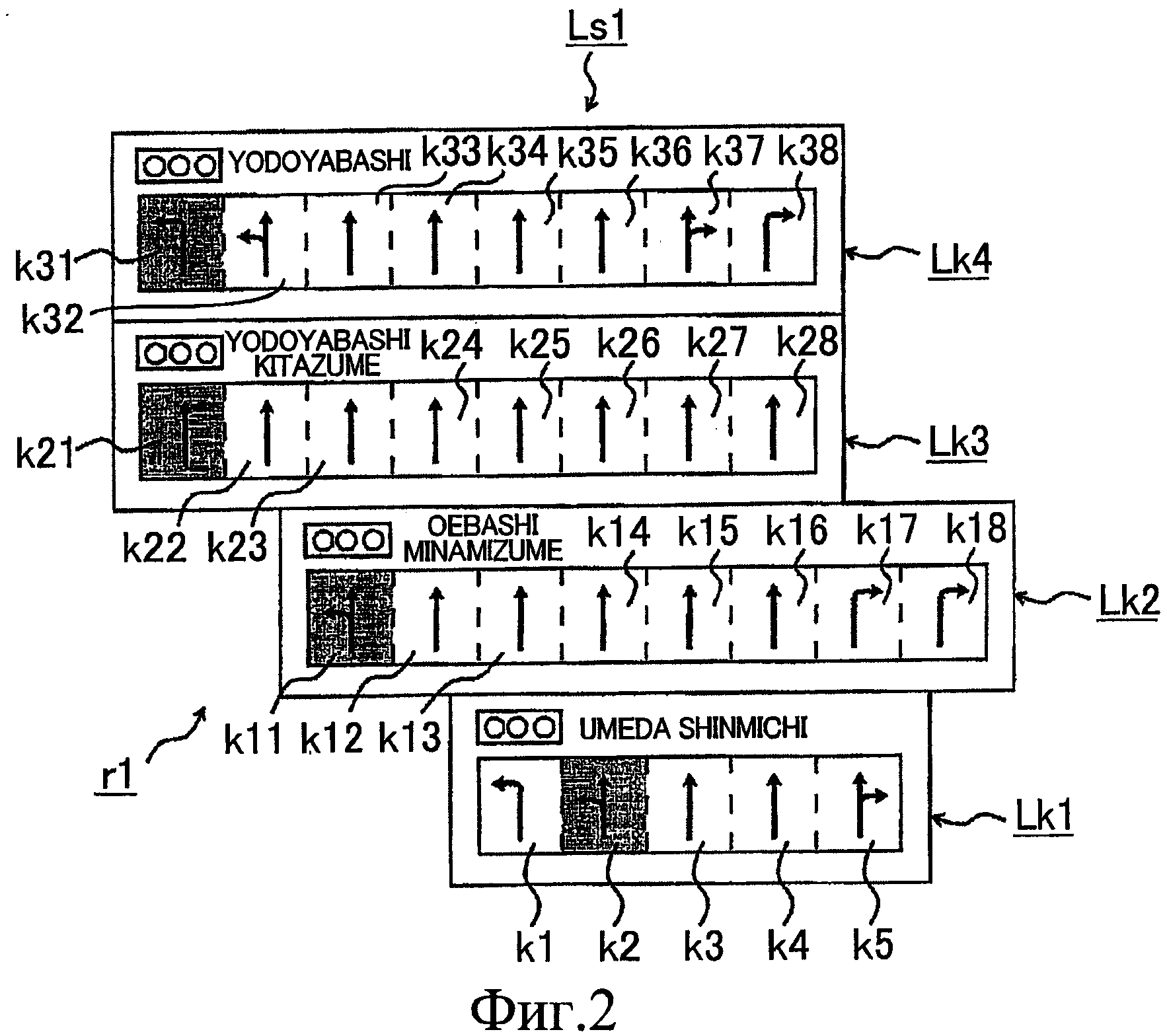
На Фиг.1 представлен пример отображения стандартного списка полос, а на Фиг.2 показан пример отображения списка полос с учетом соединений между полосами.
В этом случае в качестве участка отображения списка полос устанавливают участок в области, лежащей на заранее установленном расстоянии перед местоположением проводимого транспортного средства, причем список Ls1 полос формируют для каждого перекрестка на участке отображения списка полос, который имеет сигнализацию для регулирования движения. Ссылочная позиция r1 обозначает дорогу, Lk1 обозначает группу полос, содержащую соединение дорог от места положения проводимого транспортного средства до перекрестка "Umedashinmichi", Lk2 обозначает группу полос, содержащую соединение дорог от перекрестка "Umedashinmichi" до перекрестка "Oebashi Minamizume", Lk3 обозначает группу полос, содержащую соединение дорог от перекрестка "Oebashi Minamizume" до перекрестка "Yodoyabashi Kitazume", а Lk4 обозначает группу полос, содержащую соединение дорог от перекрестка "Yodoyabashi Kitazume" до перекрестка "Yodoyabashi".
Группа Lk1 полос включает в себя полосы с k1 по k5, группа Lk2 полос включает в себя полосы с k11 по k18, группа Lk3 полос включает в себя полосы с k21 по k28 и группа Lk4 полос включает в себя полосы с k31 по k38, причем в каждой из групп с Lk1 по Lk4 в качестве рекомендуемых полос, по которым рекомендуется двигаться, отображаются полосы k2, k11, k21 и k31 для каждого соединения дорог.
Кроме того, в списке Ls1 полос для каждой из полос с k1 по k5, с k11 по k18, с k21 по k28 и с k31 по k38 определяют участки трафика, которые указывают прямое направление, причем для каждого участка трафика предусмотрены стрелки, указывающие направление трафика, то есть направление выезда, на каждом из перекрестков.
В частности, полосы k1 и k31 являются левоповоротными полосами и предусмотрены стрелки, показывающие, что эти полосы являются левоповоротными полосами. Полосы k2, k11 и k32 являются левоповоротными и сквозными полосами, для которых предусмотрены стрелки, показывающие, что эти полосы являются левоповоротными и сквозными. Полосы k3, k4, с k12 по k16, с k21 по k28 и c k33 по k36 являются полосами сквозного движения, для которых предусмотрены стрелки, показывающие, что эти полосы являются сквозными. Полосы k5 и k37 являются правоповоротными и сквозными полосами, для которых предусмотрены стрелки, показывающие, что эти полосы являются правоповоротными и сквозными. Полосы k17, k18 и k38 являются правоповоротными полосами, для которых предусмотрены стрелки, показывающие, что эти полосы являются правоповоротными.
Кроме того, поскольку полосы k2, k11, k21 и k31 являются рекомендованными полосами, они отображаются с другим цветом фона, окружающего стрелки, так что их можно легко отличить от других полос.
Таким образом, на найденном маршруте в случае, когда на перекрестке "Yodoyabashi" выполняется левый поворот, после того как транспортное средство проехало вперед по дороге r1 до перекрестка "Yodoyabashi", направление на ту или иную полосу выполняется так, чтобы транспортное средство прошло прямо через несколько полос в следующем порядке: k2, k11, k21 и k31. Следует отметить, что перекресток "Yodoyabashi" входит в найденный маршрут и является направляющим перекрестком, где транспортное средство получает указание выполнить левый поворот, правый поворот или двигаться прямо.
Однако, как показано на Фиг.2, на реальной дороге r1 из-за соединения полос k2 и k14, k11 и k23, k21 и k31 при попытке проводимого транспортного средства двигаться по полосам k2, k11, k21 и k31, являющимися рекомендуемыми полосами, проводимое транспортное средство движется по полосе k2 по соединению дорог от места положения проводимого транспортного средства до перекрестка "Umedashinmichi", въезжает на полосу k14 на перекрестке "Umedabashinmichi", переходит с полосы k14 на полосу k11 на соединении дорог между перекрестком "Umedashinmichi" и перекрестком "Oebashi Minamizume", въезжает на полосу k23 на перекрестке "Oebashi Minamizume", переходит с полосы k23 на полосу k21 на соединении дорог между перекрестком "Oebashi Minamizume" и перекрестком "Yodoyabashi Kitazume", въезжает на полосу k31 на перекрестке "Yodoyabashi Kitazume", движется по полосе 31 на соединении дорог между перекрестком "Yodoyabashi Kitazume" и перекрестком "Yodoyabashi", а затем поворачивает налево на перекрестке "Yodoyabashi".
Таким образом, водитель может рассматривать отображение списка полос с учетом соединений между полосами из групп Lk1-Lk4 полос для каждого из соединений дорог, так что у него появится возможность определить, есть ли необходимость перемещения с полосы на полосу в каждом из узлов дорог, и каким образом необходимо выполнить перемещение между полосами в каждом соединении дорог, так что на каждом из перекрестков, таких как перекрестки, показанные на Фиг.2, связываются соединения дорог, где находится въездной перекресток, то есть въездная дорога, и дорога, где находится перекресток для выезда, то есть выездная дорога.
[Патентный документ 1] - Публикация заявки на патент Японии №JP-A-2005-214630.
Раскрытие изобретения
Проблемы, решаемые изобретением
Однако в известных навигационных устройствах, например, из-за ограничений на размеры блока отображения максимальное количество полос, которое может отображаться вместе, определяется произвольным образом, и, например, в случае отображения списка полос, такого как список, показанный на Фиг.2, получается 10 полос, расположенных между крайними левыми полосами k21 и k31 и крайней правой полосой k18 среди всех полос с k1 по k5, с k11 по k18, с k21 по k28 и c k31 по k38, причем размер списка полос превышает максимальную область визуализации блока отображения полос.
Таким образом, при визуализации каждой из полос с k1 по k5, с k11 по k18, с k21 по k28 и c k31 по k38 можно учитывать уменьшение размера, то есть ширины в поперечном направлении, но в этом случае ухудшается видимость списка полос.
Целью настоящего изобретения является создание системы и программ проводки по маршруту, которые решают проблемы известного навигационного устройства, могут отображать карты проводки по полосам, которые учитывают соединения между полосами, и предотвращать ухудшение видимости карт проводки по полосам.
Средства решения проблем
Для решения вышеописанных проблем система проводки по маршруту по настоящему изобретению включает в себя блок определения текущего местоположения, который определяет текущее местоположение транспортного средства в качестве местоположения проводимого транспортного средства; средство обработки установки списка полос, которое создает список полос, учитывающий соединения между полосами для группы полос соединения дорог, которые присутствуют на участке отображения списка полос, установленном перед местоположением проводимого транспортного средства; средство обработки для определения области визуализации, которое определяет, превышает ли количество полос в списке полос количество полос, которое было установлено в блоке отображения; и средство обработки для регулировки области отображения, которое выбирает заранее определенные полосы в списке полос и отображает только выбранные полосы в том случае, когда количество полос в списке полос превышает количество полос, которое было установлено в блоке отображения.
Результаты изобретения
Согласно настоящему изобретению в случае, когда количество полос в списке полос, учитывающем соединения между полосами, превышает количество полос, которое было установлено в блоке отображения, выбирают заранее определенные полосы в списке полос и отображают только эти выбранные полосы. Таким образом, полосы, отображать которые нет большой необходимости, могут быть удалены из области отображения. Следовательно, имеется возможность надежно отображать основную часть списка полос с учетом соединений между полосами. Кроме того, поскольку нет необходимости уменьшать размер каждой из визуализируемых полос, можно предотвратить ухудшение видимости списка полос.
Краткое описание чертежей
Фиг.1 - чертеж, иллюстрирующий пример отображения стандартного списка полос.
Фиг.2 - чертеж, иллюстрирующий пример отображения списка полос, учитывающего соединения между полосами.
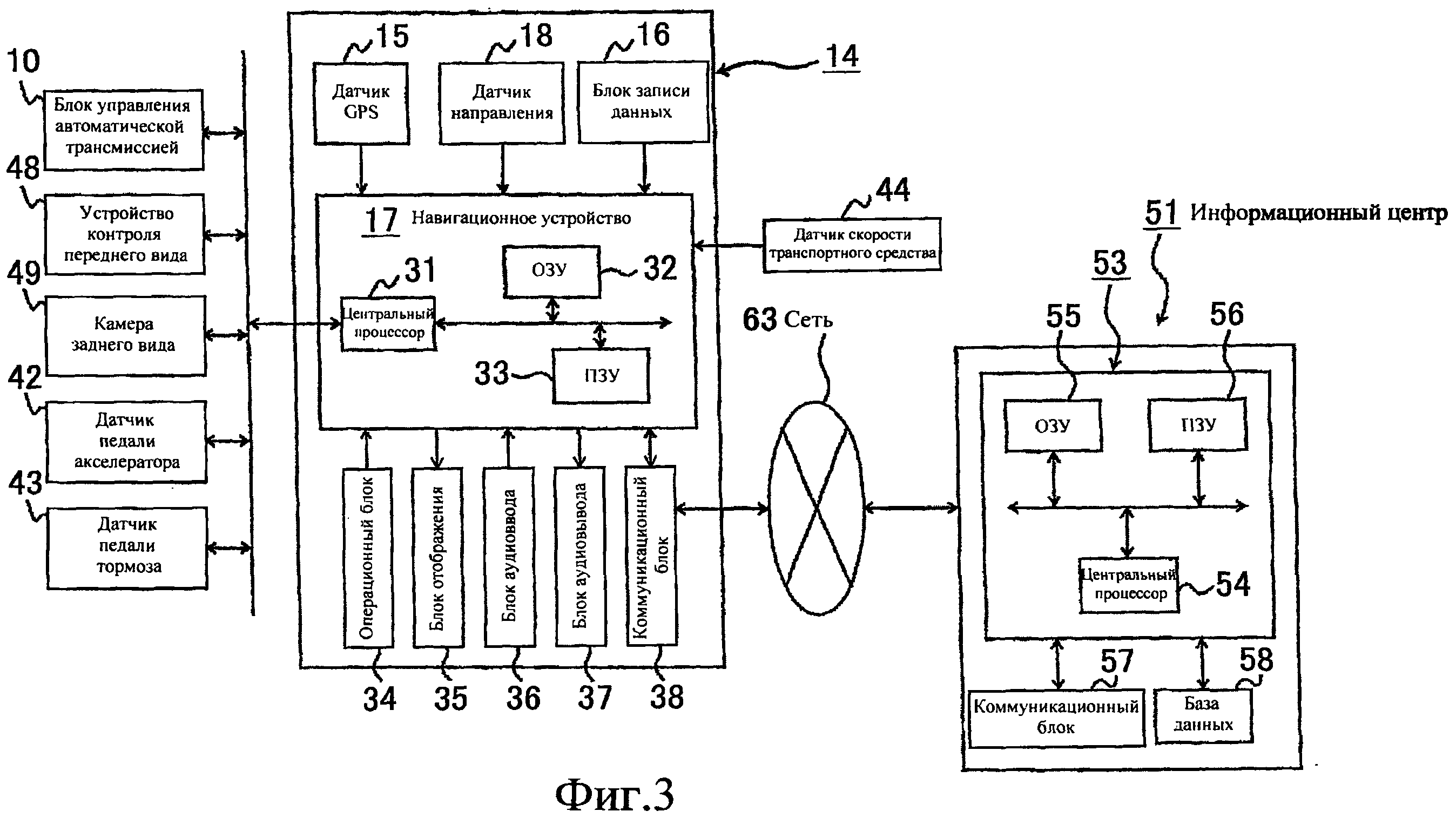
Фиг.3 - чертеж, иллюстрирующий навигационную систему в первом варианте осуществления настоящего изобретения.
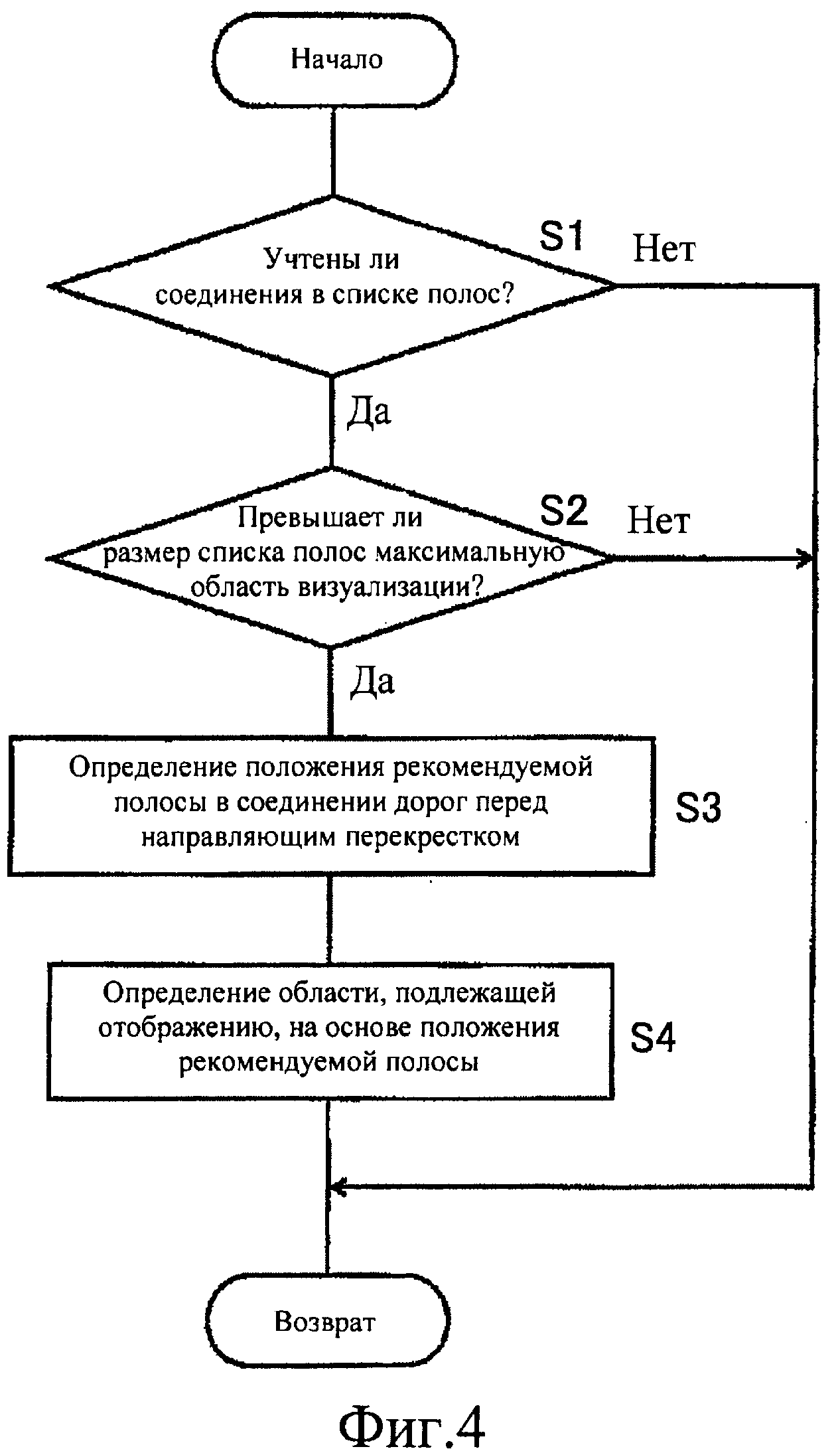
Фиг.4 - блок-схема, иллюстрирующая работу средства обработки отображения полос в первом варианте осуществления настоящего изобретения.
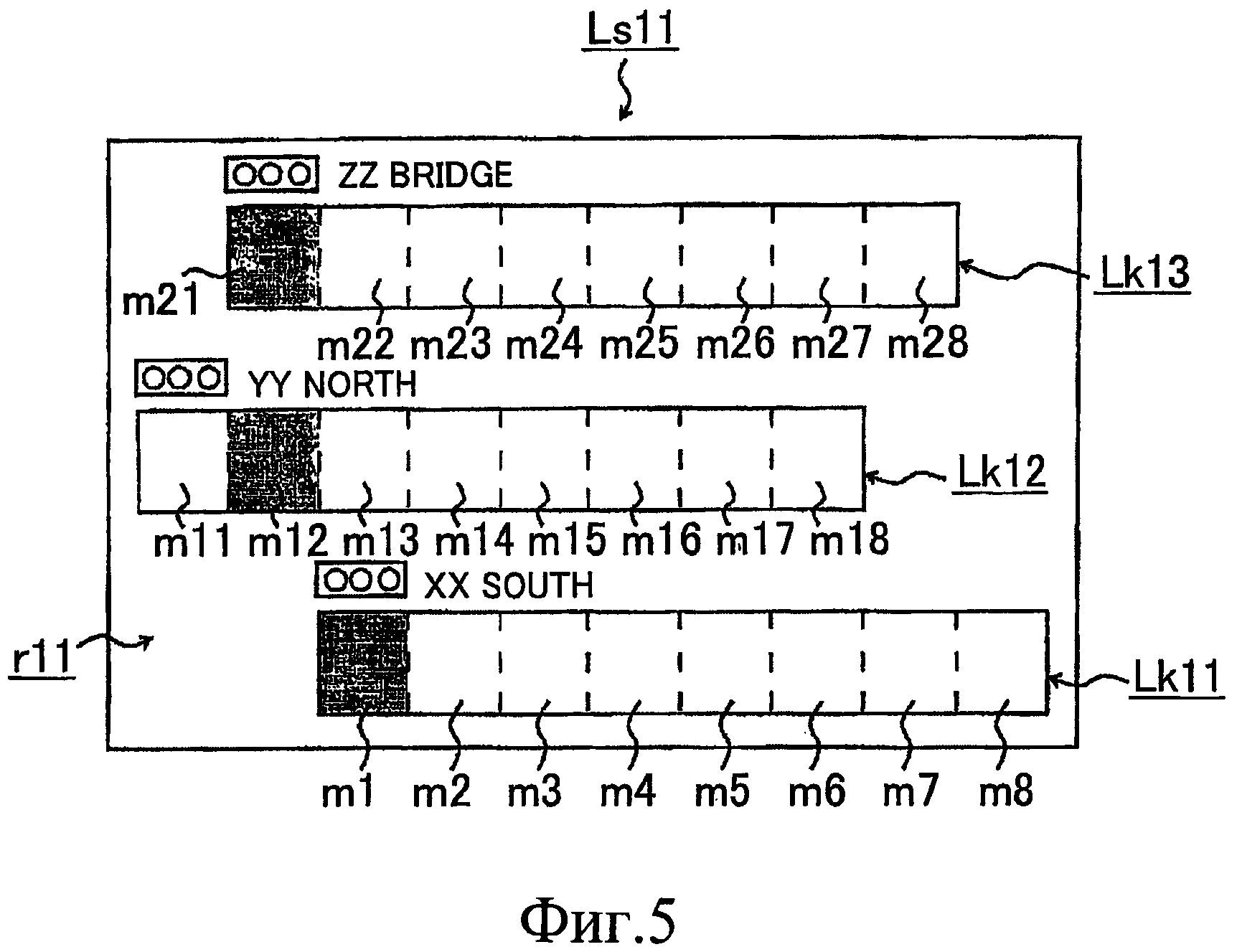
Фиг.5 - чертеж, иллюстрирующий пример списка полос, учитывающего соединение между полосами в первом варианте осуществления настоящего изобретения.
Фиг.6 - первый чертеж, иллюстрирующий способ определения положения рекомендуемой полосы в первом варианте осуществления настоящего изобретения.
Фиг.7 - второй чертеж, иллюстрирующий способ определения положения рекомендуемой полосы в первом варианте осуществления настоящего изобретения.
Фиг.8 - третий чертеж, иллюстрирующий способ определения положения рекомендуемой полосы в первом варианте осуществления настоящего изобретения.
Фиг.9 - четвертый чертеж, иллюстрирующий способ определения положения рекомендуемых полос в первом варианте осуществления настоящего изобретения.
Фиг.10 - пятый чертеж, иллюстрирующий способ определения положения рекомендуемых полос в первом варианте осуществления настоящего изобретения.
Фиг.11 - шестой чертеж, иллюстрирующий способ определения положения рекомендуемых полос в первом варианте осуществления настоящего изобретения.
Фиг.12 - седьмой чертеж, иллюстрирующий способ определения положения рекомендуемых полос в первом варианте осуществления настоящего изобретения.
Фиг.13 - восьмой чертеж, иллюстрирующий способ определения положения рекомендуемых полос в первом варианте осуществления настоящего изобретения.
Фиг.14 - девятый чертеж, иллюстрирующий способ определения положения рекомендуемых полос в первом варианте осуществления настоящего изобретения.
Фиг.15 - первый чертеж, иллюстрирующий пример отображения списка полос в первом варианте осуществления настоящего изобретения.
Фиг.16 - второй чертеж, иллюстрирующий пример отображения списка полос в первом варианте осуществления настоящего изобретения.
Фиг.17 - блок-схема, иллюстрирующая работу средства обработки отображения полос во втором варианте осуществления настоящего изобретения.
Фиг.18 - чертеж, иллюстрирующий пример отображения списка полос, который учитывает соединения между полосами, во втором варианте осуществления настоящего изобретения.
Фиг.19 - первый чертеж, иллюстрирующий пример отображения списка полос во втором варианте осуществления настоящего изобретения.
Фиг.20 - второй чертеж, иллюстрирующий пример отображения списка полос во втором варианте осуществления настоящего изобретения.
Фиг.21 - третий чертеж, иллюстрирующий пример отображения списка полос во втором варианте осуществления настоящего изобретения.
Краткое объяснение символов
10 - блок управления автоматической трансмиссией
14 - навигационное устройство
15 - датчик GPS
51 - информационный центр
63 - сеть
Ls1, Ls11 - списки полос
Lk1-4, Lk11-13 - группы полос.
Осуществление изобретения
Далее со ссылками на чертежи подробно раскрываются варианты осуществления настоящего изобретения. Следует отметить, что здесь раскрывается навигационное устройство, служащее в качестве системы проводки по маршруту.
На Фиг.3 представлен чертеж навигационной системы по первому варианту осуществления настоящего изобретения.
На этом чертеже ссылочная позиция 10 обозначает блок управления автоматической трансмиссией, причем блок 10 управления автоматической трансмиссией осуществляет управление автоматической трансмиссией. Кроме того, ссылочная позиция 14 обозначает терминал данных, например, навигационное устройство, являющееся монтируемым устройством, которое устанавливают на транспортном средстве, 63 обозначает сеть, а 51 обозначает информационный центр, служащий в качестве поставщика информации. Структура навигационной системы формируется блоком 10 управления автоматической трансмиссией, навигационным устройством 14, сетью 63, информационным центром 51 и т.п.
В навигационном устройстве 14 предусмотрены: датчик GPS 15, служащий в качестве блока определения текущего местоположения, который в качестве местоположения проводимого транспортного средства определяет текущее местоположение транспортного средства; блок 16 записи данных, который служит в качестве блока записи информации, где в дополнение к данным карты записывается информация различных типов; блок 17 обработки навигации, который выполняет арифметическую обработку различных типов, такую как обработка навигации; датчик 18 направления, служащий в качестве блока определения направления, который определяет направление транспортного средства в качестве направления движения проводимого транспортного средства; операционный блок 34, служащий в качестве первого блока ввода, с помощью которого водитель, являющийся оператором, выполняет предписанный ввод, оперируя блоком 34; блок 35 отображения, служащий в качестве первого блока вывода, для выполнения отображения различных типов путем использования изображений, которые визуализируются на экране (не показан), и обеспечения уведомлений водителю; блок 36 аудиоввода, служащий вторым блоком ввода, с помощью которого водитель выполняет предписанный ввод; блок 37 аудиовывода, служащий в качестве второго блока вывода для осуществления отображения различных типов путем использования аудио и обеспечения уведомлений водителю; и коммуникационный блок 38, служащий в качестве приемопередающего блока, который функционирует как коммуникационный терминал; причем датчик GPS 15, блок 16 записи данных, датчик 18 направления, операционный блок 34, блок 35 отображения, блок 36 аудиоввода, блок 37 аудиовывода и коммуникационный блок 38 соединены с блоком 17 обработки навигации.
Кроме того, к блоку 17 обработки навигации подсоединены: устройство 48 контроля переднего вида, которое контролирует область перед транспортным средством; задняя камера (камера контроля заднего вида) 49, служащая в качестве устройства фиксации изображений, которое фотографирует область за транспортным средством и служит в качестве устройства контроля заднего вида; датчик 42 педали акселератора, служащий в качестве блока определения нагрузки двигателя, который определяет воздействие на педаль акселератора (не показана) со стороны водителя в соответствии с углом отклонения педали акселератора; датчик 43 тормозной педали, служащий в качестве блока обнаружения торможения, который определяет воздействие на тормозную педаль (не показана) со стороны водителя в соответствии с величиной нажатия на тормозную педаль; и датчик 44 скорости транспортного средства, служащий в качестве блока определения скорости транспортного средства, который определяет скорость транспортного средства.
Следует отметить, что датчик 42 педали акселератора, датчик 43 тормозной педали и т.п. образуют блок определения воздействий на транспортное средство со стороны водителя. В частности, датчик 42 педали акселератора образует блок обнаружения ускорения, который обнаруживает действие, в ходе которого водитель намеревается ускорить транспортное средство, а датчик 43 тормозной педали формирует блок обнаружения замедления, который обнаруживает действие, в ходе которой водитель намеревается замедлить движение транспортного средства.
Датчик GPS 15 определяет текущее местоположение транспортного средства на поверхности Земли с фиксацией времени.
Блок 16 записи данных снабжен базой данных карты (не показана), которая включает в себя файлы данных карты, где данные карты записаны в упомянутой базе данных карты. Эти данные карты включают в себя характеристические данные, относящиеся к характерным деталям окружения дороги, в дополнение к данным о перекрестках, которые относятся к перекресткам (ветвлениям), данным об узлах, которые относятся к узлам, данным о дорогах, которые относятся к соединениям дорог, данным поиска, которые готовят для нахождения маршрута, и данным о зданиях, которые относятся к зданиям.
Эти характерные детали окружения являются индикаторами, которые располагаются или формируются на дороге для предоставления водителю информации различных типов, необходимой для движения и выполнения различных направляющих команд. Эти индикаторы включают в себя, например, разделительные линии, дорожные знаки, пешеходные переходы, люки, светофоры и т.п. Разметки на полосах включают в себя, например, стоп-линии для остановки транспортного средства, разграничительные линии для трафика, которые выделяют каждую из полос, разделительные линии, которые указывают места парковки и т.п., а дорожные знаки включают в себя секционные знаки регулирования движения, указывающие направление вперед на каждой полосе путем использования стрелок и управляющих знаков, таких как «Стоп» и т.п., которые предупреждают о местах временных остановок. Кроме того, характеристические данные включают в себя, например, данные о местоположении, которые указывают местоположение каждой из характерных деталей окружения путем использования информации о координатах и наглядных изображений, показывающих каждую характерную деталь окружения путем использования изображений. Следует отметить, что местоположение временной остановки включает в себя место выезда с префектурной дороги на не префектурную дорогу, железнодорожные переезды, перекрестки с мигающим красным сигналам светофора и т.п.
Кроме того, для каждого соединения дорог данные о дорогах, относящиеся к полосам, включают в себя данные о полосах, дающие информацию о полосах, включая, например, количество полос, номер полосы, который присвоен каждой из полос дороги, расположение полос и направление выезда на перекрестке для каждой из полос. В блоке 16 записи данных также записываются данные для вывода заранее определенной информации с использованием блока 37 аудиовывода.
Кроме того, в блоке 16 записи данных формируется база статистических данных (не показана), которая включает в себя файл статистических данных, и база данных о прошлых передвижениях (не показана), которая содержит файл данных о прошлых передвижениях, причем эти статистические данные записываются в файле статистических данных в виде накапливающихся данных, также как и данные о прошлых передвижениях, которые записываются в файле данных о прошлых передвижениях.
Кроме того, для записи различных типов данных, в дополнение к данным с диска (не показан), такого как жесткий диск, компакт-диск (CD), диск DVD, оптический диск или т.п., блок 16 записи данных снабжен головкой (не показана), такой как головка считывания/записи для считывания и записи данных различных типов. Кроме того, в блоке 16 записи данных можно использовать карту памяти или т.п. Следует отметить, что вышеупомянутые диск, карта памяти и т.п. формируют структуру внешнего запоминающего устройства.
В настоящем изобретении база данных карты, база статистических данных, база данных о прошлых передвижениях и т.п. созданы в блоке 16 записи данных. Однако базу данных карты, базу статистических данных, базу данных о прошлых передвижениях и т.п. можно создать в информационном центре 51.
Кроме того, в блоке 17 обработки навигации предусмотрены, например: центральный процессор CPU 31, служащий в качестве управляющего устройства для осуществления общего управления навигационным устройством 14 и в качестве арифметического устройства; оперативное запоминающее устройство RAM 32, которое используется в качестве рабочей памяти при выполнении блоком CPU 31 арифметической обработки различных типов; постоянное запоминающее устройство ROM 33, в котором в дополнение к управляющим программам записаны различные типы программ для нахождения маршрута до места назначения, выполнения проводки по маршруту и т.п.; флэш-память (не показана) и т.п., которую используют для записи различных типов данных, программ и т.п. Следует отметить, что, например, RAM 32, ROM 33 и флэш-память формируют структуру внутреннего запоминающего устройства.
В качестве операционного блока 34, который устанавливается отдельно от блока 35 отображения, можно использовать клавиатуру, мышь или т.п. (не показаны). Кроме того, в качестве операционного блока 34 можно использовать сенсорную панель, которая позволяет выполнять предписанные операции ввода путем касания или «щелчка» по изображению операционного блока, такого как клавиши, переключатели, кнопки или т.п. различных типов, которые наглядно отображаются на экране с помощью блока 35 отображения.
В качестве блока 35 отображения используют дисплей, причем на различных типах экрана, которые создаются в блоке 35 отображения, в качестве местоположения проводимого транспортного средства может отображаться текущее местоположение транспортного средства, в качестве направления проводимого транспортного средства может отображаться данное направление транспортного средства, могут отображаться карты, найденные маршруты, направляющая информация по найденным маршрутам, информация о трафике и т.п., а также может отображаться расстояние до следующего перекрестка в найденном маршруте и направление вперед на следующем перекрестке.
Кроме того, блок 36 аудиоввода содержит микрофон или т.п. (не показан) и может вводить необходимую информацию голосом. Кроме того, блок 37 аудиовывода снабжен устройством синтезирования голоса (не показано) и динамиком, при этом найденные маршруты, направляющая информация, информация о трафике и т.п. выводятся из блока 37 аудиовывода, например, голосом, который синтезирован устройством синтезирования голоса.
Коммуникационный блок 38 снабжен приемником радиомаяка (не показан) для приема информации различных типов, например, информации о текущем трафике, информации общего назначения и т.п., которая транслируется информационным центром дорожного трафика, а также приемником FM диапазона (не показан) или т.п. для приема вышеуказанной информации в виде мультиплексного вещания в диапазоне FM через вещательную станцию в диапазоне FM (не показана). Кроме того, в дополнение к таким данным, как данные карты, статистические данные, данные о прошлых передвижениях и т.п., которые принимаются из информационного центра 51, коммуникационный блок 38 может принимать информацию различных типов, такую как информацию о трафике, информацию общего назначения и т.п. через сеть 63.
Таким образом, в информационном центре 51 предусмотрены, например, сервер 53, коммуникационный блок 57, подсоединенный к серверу 53, и база данных (DB) 58, которая служит в качестве блока записи информации, а сервер 53 снабжен, например, процессором CPU 54, служащим в качестве управляющего устройства и арифметического устройства, памятью RAM 55 и ROM 56. Кроме того, в базе данных 58 записывают данные, аналогичные различным типам данных, которые хранятся в блоке 16 записи данных.
Следует отметить, что навигационная система, блок 17 обработки для навигации, блоки CPU 31 и 54, сервер 53 и т.п. действуют в качестве компьютера автономно или в комбинации из двух или более блоков и выполняют арифметическую обработку на основе различных типов программ, данных и т.п. Кроме того, блок 16 записи данных, запоминающие устройства RAM 32 и 55, ROM 33 и 56, база данных 58, флэш-память и т.п. образуют среду записи. Кроме того, в качестве арифметического устройства, вместо блоков CPU 31 и 54, в качестве арифметического блока можно использовать микропроцессорный блок (MPU) или т.п.
Далее объясняются базовые принципы работы навигационной системы, имеющей вышеописанную структуру.
Сначала, когда водитель приводит в действие операционный блок 34 и активизируется навигационное устройство 14, средство обработки для инициирования навигации (не показано) в блоке CPU 31 выполняет обработку для инициирования навигации, в результате которой считывается местоположение проводимого транспортного средства, которое было обнаружено датчиком GPS 15, и направление проводимого транспортного средства, которое было определено датчиком 18 направления, после чего инициализируются различные типы данных. Затем средство обработки согласования (не показано) в CPU 31 выполняет обработку согласования и задается местоположение проводимого транспортного средства путем определения того, находится ли проводимое транспортное средство на каком-либо соединении дорог, на основе считанного местоположения проводимого транспортного средства, контуров и конфигурации каждого соединения дорог, которые образуют дорогу в окрестности того места, где находится проводимое транспортное средство и т.п.
Кроме того, в настоящем варианте осуществления изобретения средство обработки согласования дополнительно задает местоположение проводимого транспортного средства на основе местоположений характерных деталей окружения, являющихся объектами, сфотографированных задней камерой 49.
Средство обработки распознавания изображений (не показано) в CPU 31 выполняет обработку распознавания изображений, причем данные изображения считываются с задней камеры 49, и в изображении, которое состоит из данных изображения, распознаются характерные детали окружения. Кроме того, средство обработки для вычисления расстояния (не показано) в CPU 31 выполняет обработку для вычисления расстояния и вычисляет действительное расстояние от задней камеры 49 до характерных деталей окружения на основе их положения в изображении. Кроме того, средство обработки для задания местоположения проводимого транспортного средства в средстве обработки согласования выполняет обработку для задания местоположения проводимого транспортного средства, считывает упомянутое расстояние, получает координаты характерной детали окружения и, считав данные о характерной детали окружения из блока 16 записи данных, задает местоположение проводимого транспортного средства на основе указанных координат и расстояния.
Кроме того, средство обработки для задания полосы движения (не показано) в CPU 31 выполняет обработку для задания полосы движения и аналогичным образом задает местоположение проводимого транспортного средства путем обращения к характерным деталям окружения, распознавание которых было выполнено на основе данных изображения, а также данных о характерных деталях окружения и данных о полосах, которые были считаны из блока 16 записи данных, и определяет полосу движения, по которой движется транспортное средство, на основе местоположения данного проводимого транспортного средства.
Следует отметить, что средство обработки для задания полосы движения считывает выходные данные датчика магнитного поля Земли (не показан) и на основе этих выходных данных датчика определяет, имеются ли какие-либо обнаруженные объекты, которые содержат ферромагнитный материал, например, люк, на предварительно определенной полосе на дороге, а затем может задать полосу движения на основе результатов этого определения. Кроме того, местоположение проводимого транспортного средства может быть определено с высокой точностью путем использования высокоточного датчика GPS, и на основе полученных результатов можно определить полосу, по которой движется транспортное средство. Кроме того, при необходимости можно определить полосу движения путем выполнения обработки данных изображения, касающихся меток на полосе, с одновременным объединением выходных данных датчика магнитного поля Земли и данных о местоположении проводимого транспортного средства.
Далее средство обработки для получения базовой информации (не показано) в CPU 31 выполняет обработку для получения базовой информации и либо считывает и собирает данные карты из блока 16 записи данных, либо принимает и собирает данные карты из информационного центра 51 через коммуникационный блок 38. Следует отметить, что в случае получения данных карты, например, из информационного центра 51 средство обработки для получения базовой информации загружает полученную информацию карты во флэш-память.
Кроме того, средство обработки отображения (не показано) в CPU 31 выполняет обработку отображения и формирует в блоке 35 отображения экраны различных типов. Например, средство обработки отображения карты в средстве обработки отображения выполняет обработку отображения карты и формирует на дисплее блока 35 отображение экрана с картой, отображает карту окрестностей на этом экране, а также отображает местоположение проводимого транспортного средства и направление его движения.
Таким образом, водитель может вести транспортное средство согласно картам, местоположению проводимого транспортного средства и направлению движения проводимого транспортного средства.
Кроме того, когда водитель вводит место назначения с помощью операционного блока 34, средство обработки установки места назначения (не показано) в CPU 31 выполняет обработку установки места назначения для установки места назначения. Следует отметить, что при необходимости можно ввести и установить место отправления. Кроме того, можно заранее зарегистрировать определенные места и в качестве мест назначения установить эти зарегистрированные места. Далее, когда водитель с помощью операционного блока 34 вводит условия поиска, средство обработки установки условий поиска (не показано) в блоке CPU 31 выполняет обработку установки условий поиска и устанавливает условия поиска.
Когда указанным образом установлены место назначения и условия поиска, средство обработки поиска маршрута (не показано) в CPU 31 выполняет обработку поиска маршрута, считывает местоположение проводимого транспортного средства, место назначения, условия поиска и т.п., считывает данные поиска и т.п. из блока 16 записи данных, и на основе местоположения проводимого транспортного средства, места назначения, данных поиска и т.п. выполняет поиск маршрута от места отправления, которое указывает местоположение проводимого транспортного средства, до места назначения с использованием условий поиска и выводит данные о маршруте, которые показывают найденный маршрут. В этом случае маршрут, установленный в качестве найденного маршрута, представляет собой маршрут, для которого совокупные издержки, в которые вносит свой вклад каждое из соединений дорог, являются наименьшими.
Кроме того, можно выполнить обработку поиска маршрута в информационном центре 51. В этом случае CPU 31 передает местоположение проводимого транспортного средства, место назначения, условия поиска и т.п. в информационный центр 51 через коммуникационный блок 38 и сеть 63. Когда информационный центр 51 получает местоположение проводимого транспортного средства, место назначения, условия поиска и т.п. средство обработки поиска маршрута (не показано) в CPU 54 выполняет обработку поиска маршрута, аналогичную обработке в CPU 31, считывает данные поиска и т.п. из базы данных 58 и на основе местоположения проводимого транспортного средства, места назначения и данных поиска находит маршруты от места отправления к месту назначения, используя условия поиска, после чего выводит данные о маршрутах, которые указывают найденные маршруты. Далее средство обработки передачи (не показано) в CPU 54 выполняет обработку передачи и передает данные о маршрутах в навигационное устройство 14 через сеть 63.
Затем средство обработки для проводки по маршруту (не показано) в CPU 31 выполняет необходимую обработку для проводки по маршруту и осуществляет проводку по маршруту. Таким образом, средство обработки отображения маршрута в средстве обработки проводки по маршруту выполняет обработку отображения маршрута, считывает данные о маршруте и отображает найденный маршрут на экране с картой согласно данным о маршруте.
В этой связи, при такой проводке по маршруту в случае, когда на заранее определенном перекрестке необходимы направляющие команды для поворота транспортного средства налево, направо или его движения прямо, этот перекресток устанавливается в качестве направляющего пункта и в качестве направляющего перекрестка. Таким образом, средство обработки для установки направляющего перекрестка в средстве обработки проводки по маршруту выполняет обработку для установки направляющего перекрестка и, в зависимости от данных о маршруте, то есть на основе найденного маршрута, определяет, имеется ли перекресток, который потребует от транспортного средства поворота налево, направо или движения вперед. В случае, когда имеется перекресток, который потребует от транспортного средства поворота налево, направо или движения вперед, этот перекресток устанавливается в качестве направляющего перекрестка.
Далее средство обработки для формирования изображения направляющего пункта в средстве обработки проводки по маршруту выполняет обработку для формирования увеличенного изображения направляющего пункта, и, прежде чем транспортное средство прибудет на направляющий перекресток, в заранее определенной области экрана с картой формируется увеличенное изображение перекрестка, служащее в качестве увеличенного изображения направляющего пункта, и выполняется проводка по маршруту с использованием этого увеличенного изображения перекрестка. Чтобы выполнить проводку по маршруту после установки местоположения отображения увеличенного изображения направляющего пункта в месте, отстоящем на установленном расстоянии до направляющего перекрестка на найденном маршруте (сбоку от местоположения проводимого транспортного средства), и прибытия транспортного средства на место отображения увеличенного изображения направляющего пункта, отображается увеличенное изображение перекрестка.
В этом случае на увеличенном изображении перекрестка отображаются, например, карта окрестности направляющего перекрестка, найденный маршрут и наземные ориентиры, такие как здания, которые служат в качестве индикаторов на направляющем перекрестке. Следует отметить, что на автомагистрали, городской автомагистрали, платной дороге, выделенной для транспортных средств, например, на той же дороге с оплатой за проезд, в качестве направляющих перекрестков устанавливают перекрестки, на которых происходит соединение дорог, их разветвление или т.п.
Кроме того, средство обработки для установки мест проводки по маршруту в средстве обработки проводки по маршруту выполняет обработку для установки мест проводки по маршруту, и на установленных расстояниях перед направляющим перекрестком на найденном маршруте устанавливаются одно или несколько, или, как в настоящем изобретении, множество найденных мест, и в тот момент, когда транспортное средство достигает любого из таких мест, средство обработки аудиовывода в средстве обработки для проводки по маршруту выполняет обработку аудиовывода, и для направляющих перекрестков из блока 37 аудиовывода выводится аудиоинформация, в частности, фразы, указывающие направление движения.
Таким образом, фразы для проводки по полосам устанавливаются заранее для каждой комбинации полосы движения и рекомендуемой полосы или для отрезков пути от места проводки по полосам до направляющего перекрестка и т.п., которые записываются в виде карты с фразами для проводки по полосам в блоке 16 записи данных.
Кроме того, в случае, когда в найденный маршрут включена дорога, имеющая множество полос, средство обработки для проводки по полосам в средстве обработки проводки по маршруту выполняет обработку для проводки по полосам и считывает найденные маршруты. Считываются данные о перекрестке, данные о полосах и т.п., и проводка по полосам выполняется на основе найденных маршрутов, данных о перекрестке, данных о полосах и т.п. Таким образом, средство обработки установки рекомендуемой полосы в средстве обработки для проводки по полосам выполняет обработку установки рекомендуемой полосы и устанавливает рекомендуемую полосу в каждом соединении дорог на основе направления выезда, которое избирательно указывает левый поворот, правый поворот или движение вперед на каждом из направляющих перекрестков на найденном маршруте, на основе расположения полос на выездной дороге с направляющего перекрестка и т.п.
Кроме того, средство обработки отображения полос в средстве обработки для проводки по полосам выполняет обработку отображения полос, разбивает экран блока 35 отображения на две части (левую и правую) для формирования первого и второго направляющих экранов, устанавливает первый направляющий экран в качестве блока отображения карты, устанавливает второй направляющий экран в качестве блока отображения полос и отображает карту в блоке отображения карты, а также отображает в блоке отображения полос список полос, служащий в качестве карты проводки по полосам. Следует отметить, что средство обработки отображения полос может установить блок отображения полос на участке экрана с картой в блоке 35 отображения и отображать список полос в блоке отображения полос.
Кроме того, средство обработки отображения полос считывает номер рекомендованной полосы и отображает рекомендованную полосу в группе полос для каждого из соединений дорог в списке полос. В настоящем изобретении рекомендованная полоса отображается, например, с другим цветом фона, окружающего стрелку, которая указывает направление движения по прямой, с тем, чтобы можно было отличить эту полосу от других полос. Кроме того, стрелку можно отображать в виде, отличном от стрелок других полос.
Затем средство направляющей обработки в средстве обработки проводки по полосам выполняет обработку, связанную с проводкой, считывает полосу движения из средства обработки спецификации полос движения и считывает рекомендованную полосу из средства обработки для вычисления рекомендованной полосы, а затем на основе местоположения проводимого транспортного средства вычисляет расстояние от местоположения проводимого транспортного средства до направляющего перекрестка, обращается к карте с направляющими фразами и считывает направляющие фразы, которые соответствуют текущей полосе движения, рекомендованной полосе и дистанции.
Кроме того, средство направляющей обработки активизирует устройство синтезирования речи, выводит направляющие фразы синтезированным голосом из динамика блока 37 аудиовывода и направляет транспортное средство с полосы его движения на рекомендованную полосу.
Далее поясняется работа средства обработки отображения полос.
На Фиг.4 представлена блок-схема, иллюстрирующая работу средства обработки отображения полос в первом варианте осуществления настоящего изобретения; на Фиг.5 представлен чертеж, иллюстрирующий пример списка полос, учитывающего соединения между полосами, в первом варианте осуществления настоящего изобретения; на Фиг.6 представлен первый чертеж, иллюстрирующий способ определения положения рекомендованных полос в первом варианте осуществления настоящего изобретения; на Фиг.7 представлен второй чертеж, иллюстрирующий способ определения положения рекомендованных полос в первом варианте осуществления настоящего изобретения; на Фиг.8 представлен третий чертеж, иллюстрирующий способ определения положения рекомендованных полос в первом варианте осуществления настоящего изобретения; на Фиг.9 представлен четвертый чертеж, иллюстрирующий способ определения положения рекомендованных полос в первом варианте осуществления настоящего изобретения; на Фиг.10 представлен пятый чертеж, иллюстрирующий способ определения положения рекомендованных полос в первом варианте осуществления настоящего изобретения; на Фиг.11 представлен шестой чертеж, иллюстрирующий способ определения положения рекомендованных полос в первом варианте осуществления настоящего изобретения; на Фиг.12 представлен седьмой чертеж, иллюстрирующий способ определения положения рекомендованных полос в первом варианте осуществления настоящего изобретения; на Фиг.13 представлен восьмой чертеж, иллюстрирующий способ определения положения рекомендованных полос в первом варианте осуществления настоящего изобретения; на Фиг.14 представлен девятый чертеж, иллюстрирующий способ определения положения рекомендованных полос в первом варианте осуществления настоящего изобретения; на Фиг.15 представлен первый чертеж примера списка волос в первом варианте осуществления настоящего изобретения; на Фиг.16 представлен второй чертеж примера, иллюстрирующего список полос в первом варианте осуществления настоящего изобретения.
Сначала средство обработки для установки списка полос в средстве обработки отображения полос выполняет обработку для установки списка полос, считывается местоположение проводимого транспортного средства, данные о дороге, данные о перекрестке и т.п., в качестве участка для отображения списка полос устанавливается участок в рамках заранее определенного расстояния перед местоположением проводимого транспортного средства, и на участке отображения списка полос создается список полос для каждого соединения дорог перед каждым перекрестком.
В связи с этим в случае, когда на участке отображения списка полос имеется только один перекресток, можно визуализировать список полос для соединений дорог перед этим перекрестком, как он есть. Однако возможна ситуация, когда не удастся отобразить полосу, как она есть, с учетом ее размера в случае, когда на участке отображения списка полос имеется два или более перекрестков, и список полос является списком, в котором можно двигаться прямо без перемещения с полосы на полосу от въездной дороги до выездной дороги на каждом перекрестке, причем этот список учитывает соединения между полосами, так что можно соединить въездную дорогу с выездной.
Таким образом, средство обработки для определения соединений в средстве обработки отображения полос выполняет обработку для определения соединений и, как показано на Фиг.5, определяет, является ли список полос списком, который учитывает соединения между полосами.
Как показано на Фиг.5, ссылочная позиция Ls11 относится к списку полос, причем этот список Ls11 полос формируется каждым из перекрестков "XX South", "YY North" и "ZZ Bridge", которые находятся внутри участка отображения списка полос и имеют светофорную сигнализацию, а "ZZ Bridge" является направляющим перекрестком, на котором выдается указание на левый поворот на найденном маршруте. Кроме того, ссылочная позиция r11 относится к дороге, Lk11 относится к группе полос, которая состоит из соединения дорог от местоположения проводимого транспортного средства до перекрестка "XX South", Lk12 относится к группе полос, которая состоит из соединения дорог от перекрестка "XX South" до перекрестка "YY North", а Lk13 относится к группе полос, состоящей из соединения дорог от перекрестка "YY North" до перекрестка "ZZ Bridge".
Группа Lk11 полос включает в себя полосы с m1 по m8, группа Lk12 полос включает в себя полосы с m11 по m18, а группа Lk13 полос включает в себя полосы с m21 по m28, причем в каждой из групп полос с Lk11 по Lk13 в качестве рекомендованных полос отображаются полосы m1, m12 и m21.
Кроме того, в списке Ls11 полос установлен участок трафика, на котором указано направление движения вперед для каждой из полос с m1 по m8, с m11 по m18 и с m21 по m28, и предусмотрены стрелки (не показаны), указывающие направление движения вперед на каждому участке трафика.
Кроме того, полосы m1, m12 и m21 являются рекомендованными полосами, в связи с чем они отображаются с другим цветом фона, окружающего стрелки, так что эти полосы можно отличить от других полос.
Таким образом, в случае левого поворота на перекрестке "ZZ Bridge" после прямого движения по дороге r11 до перекрестка "ZZ Bridge" на найденном маршруте, транспортному средству дается указание на последовательное прохождение полос m1, m12 и m21.
В этой связи, на дороге r11, как показано на Фиг.5, в случае когда соединены полосы m1 и m13 и соединены полосы m12 и m21, при движении транспортного средства по рекомендованным полосам m1, m12 и m21 по соединению дорог от местоположения проводимого транспортного средства к перекрестку "XX South" это транспортное средство движется по полосе m1, затем въезжает на полосу m13 на перекрестке "XX South", переходит с полосы m13 на полосу m12 на соединении дорог между перекрестком "XX South" и перекрестком "YY North", въезжает на полосу m21 на перекрестке "YY North", движется по полосе m21 на соединении дорог между перекрестком "YY North" и перекрестком "ZZ Bridge" и поворачивает налево на перекрестке "ZZ Bridge".
Таким образом, список Ls11 полос отображается с учетом соединений между полосами с m1 по m8, с m11 по m18 и с m21 по m28 между группами Lk11 и Lk13 полос на каждом из соединений дорог, так что на каждом перекрестке, например, на тех, которые показаны на Фиг.5, въездные дороги, которые обеспечивают въезд на перекресток, и выездные дороги, которые обеспечивают выезд с перекрестка, связаны так, что водитель может определить, необходимо ли сменить полосу на каждом из соединений дорог и каким образом должна выполняться смена полос.
Кроме того, в случае, когда список Ls11 полос является списком, учитывающим соединения между полосами с m1 по m8, с m11 по 18 и с m21 по m28, средство обработки для определения области визуализации в средстве обработки отображения полос выполняет обработку для определения области визуализации и определяет, превышает ли размер списка Ls11 полос максимальную область визуализации блока отображения полос, то есть определяет, превышает ли количество полос в списке Ls11 полос количество полос, которое было установлено в блоке 35 отображения.
Например, в случае, когда формируется список Ls11 полос, такой как показан на Фиг.5, количество полос, расположенных между крайней левой полосой m11 и крайней правой полосой m8 из числа полос с m1 по m8, с m11 по m18 и с m21 по m28, равно 10, и размер списка Ls11 полос превышает максимальную область визуализации блока отображения полос.
Таким образом, средство обработки для регулировки области отображения в средстве обработки отображения полос выполняет обработку для регулировки области отображения, и регулируется область отображения списка полос, с тем чтобы она соответствовала максимальной области визуализации, на основе структуры групп полос соединений дорог, или, как в настоящем варианте осуществления изобретения, на основе положения рекомендованных полос в соединениях дорог перед направляющими перекрестками выбирают заранее определенные полосы и выполняется отображение только этих выбранных полос. В этом случае средство обработки для регулировки области отображения формирует средство обработки для выбора полос, и средство обработки для выбора полос выполняет обработку, обеспечивающую выбор определенных полос.
Кроме того, средство обработки для определения положения рекомендованных полос в средстве обработки для регулировки области отображения выполняет обработку для определения положения рекомендованных полос и определяет положения рекомендованных полос в соединениях дорог перед направляющими перекрестками, то есть на Фиг.5 это положения рекомендованных полос в соединениях дорог перед перекрестком "ZZ Bridge".
Таким образом, средство обработки для определения положения рекомендованных полос считывает данные о перекрестке, данные о полосах и т.п., и в группе полос соединения дорог перед направляющим перекрестком сравнивается количество полос слева от рекомендованной полосы с количеством полос справа от рекомендованной полосы. В случае, когда количество полос справа превышает количество полос слева, определяют, что рекомендованная полоса на соединении дорог проходит слева, а в случае, когда количество полос справа меньше количества полос слева, определяют, что рекомендованная полоса в соединении дорог проходит справа, а в случае, когда количество полос слева и количество полос справа равны, определяют что рекомендованная полоса находится в центре соединения дорог.
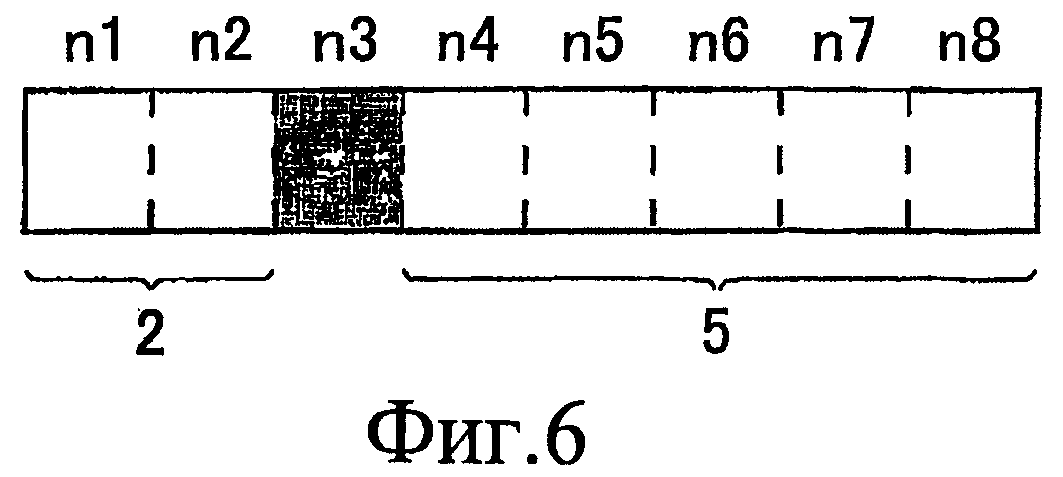
Например, как показано на Фиг.6, в случае, когда группа полос соединения дорог перед направляющим перекрестком состоит из полос с n1 по n8 и рекомендованной полосой является полоса n3, количество полос слева от рекомендованной полосы равно 2, а количество полос справа от рекомендованной полосы равно 5. В этом случае средство обработки для определения положения рекомендованной полосы определяет, что рекомендованная полоса находится в соединении дорог слева.
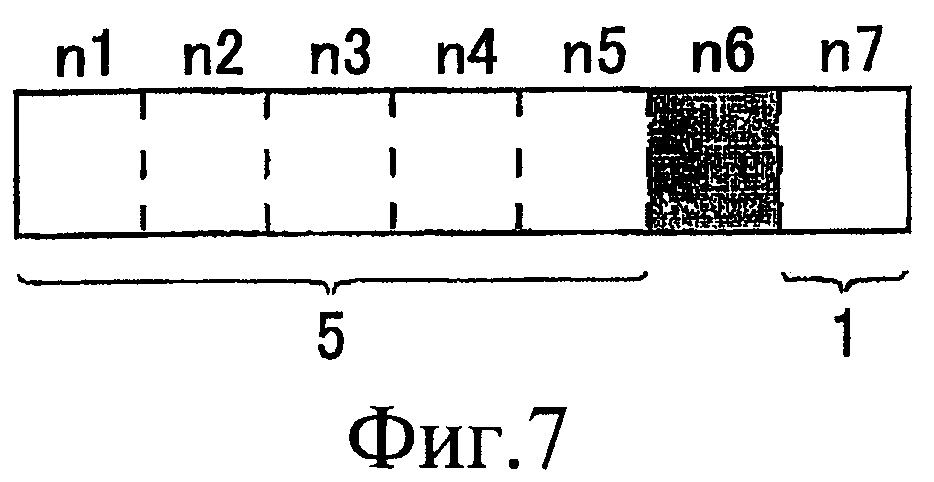
Например, как показано на Фиг.7, в случае, когда группа полос соединения дорог перед направляющим перекрестком состоит из полос с n1 по n7 и рекомендованной полосой является полоса n6, количество полос слева от рекомендованной полосы равно 5, а количество полос справа от рекомендованной полосы равно 1. В этом случае средство обработки для определения положения рекомендованной полосы определяет, что рекомендованная полоса находится в соединении дорог справа.
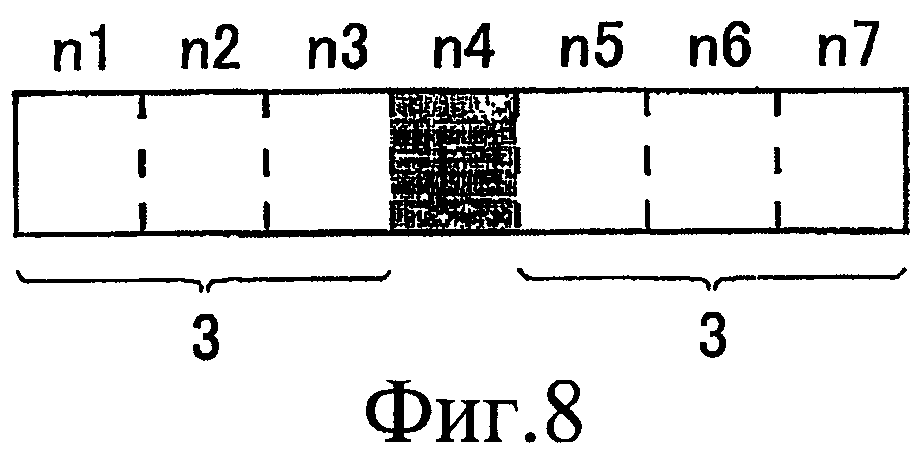
Кроме того, как показано на Фиг.8, в случае, когда группа полос соединения дорог перед направляющим перекрестком состоит из полос с n1 по n7 и рекомендованной полосой является полоса n4, количество полос слева и количество полос справа от рекомендованной полосы равно то и другое 3. В этом случае средство обработки для определения положения рекомендованной полосы определяет, что рекомендованная полоса находится в центре соединения дорог.
Следует отметить, что в случае, когда имеется множество рекомендованных полос, средство обработки для определения положения рекомендованных полос выполняет определение после сравнения количества полос слева от рекомендованных полос с количеством полос справа от рекомендованных полос.
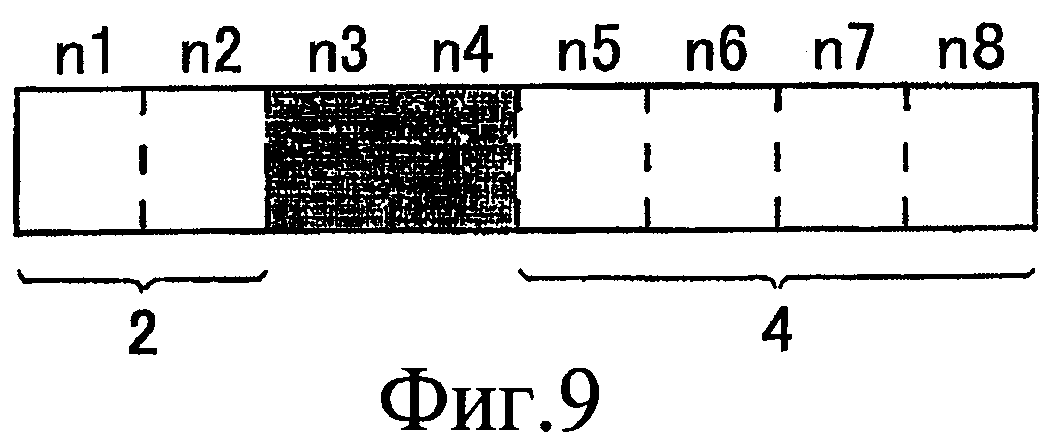
Например, как показано на Фиг.9, в случае, когда группа полос соединения дорог перед направляющим перекрестком состоит из полос с n1 по n8 и рекомендованными полосами являются полосы n3 и n4, количество полос слева от рекомендованных полос равно 2, а количество полос справа от рекомендованных полос равно 5. В этом случае средство обработки для определения положения рекомендованных полос определяет, что рекомендованные полосы находятся слева в соединении дорог.
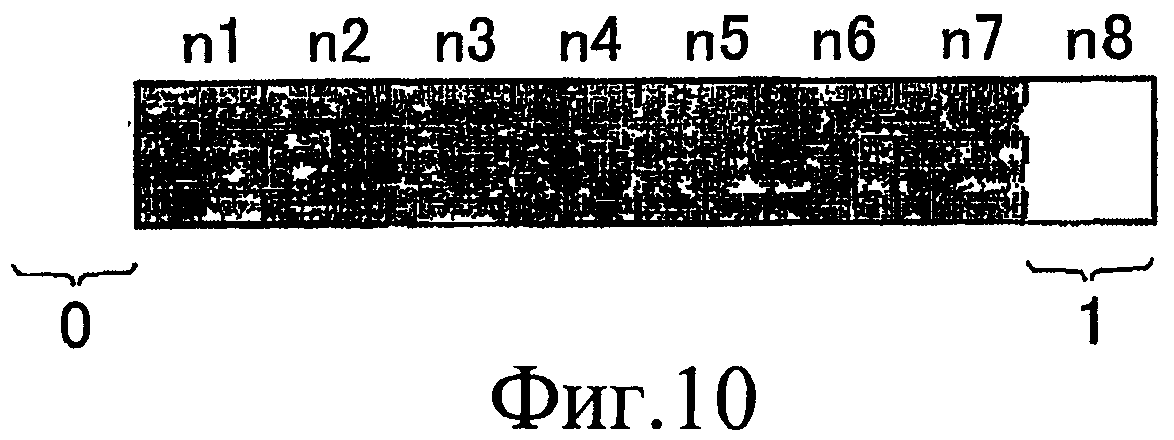
Например, как показано на Фиг.10, в случае, когда группа полос соединения дорог перед направляющим перекрестком состоит из полос с n1 по n8 и рекомендованными полосами являются полосы с n1 и n7, количество полос слева от рекомендованных полос равно 0 (нулю), а количество полос справа от рекомендованных полос равно 1. В этом случае средство обработки для определения положения рекомендованных полос определяет, что рекомендованные полосы находятся слева в соединении дорог.
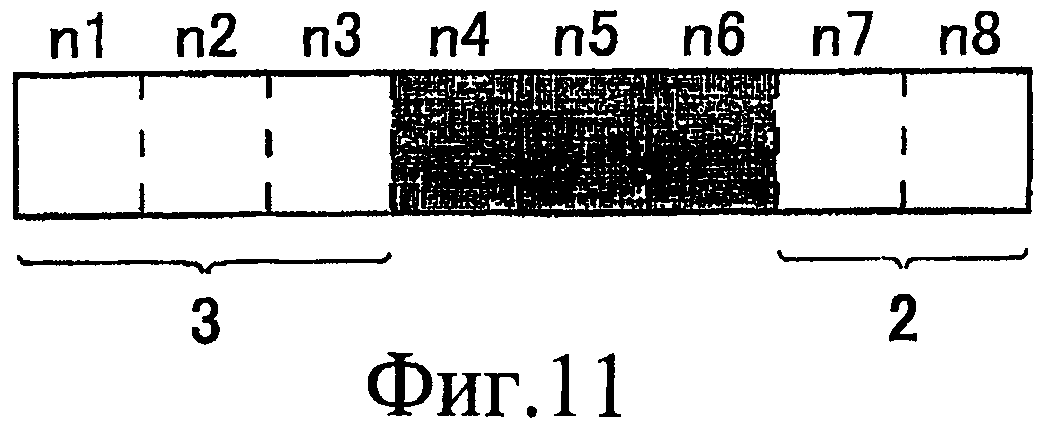
Кроме того, как показано на Фиг.11, в случае, когда группа полос соединения дорог перед направляющим перекрестком состоит из полос с n1 по n8 и рекомендованными полосами являются полосы с n4 по n6, количество полос слева от рекомендованных полос равно 3, а количество полос справа от рекомендованных полос равно 2. В этом случае средство обработки для определения положения рекомендованных полос определяет, что рекомендованные полосы находятся справа в соединении дорог.
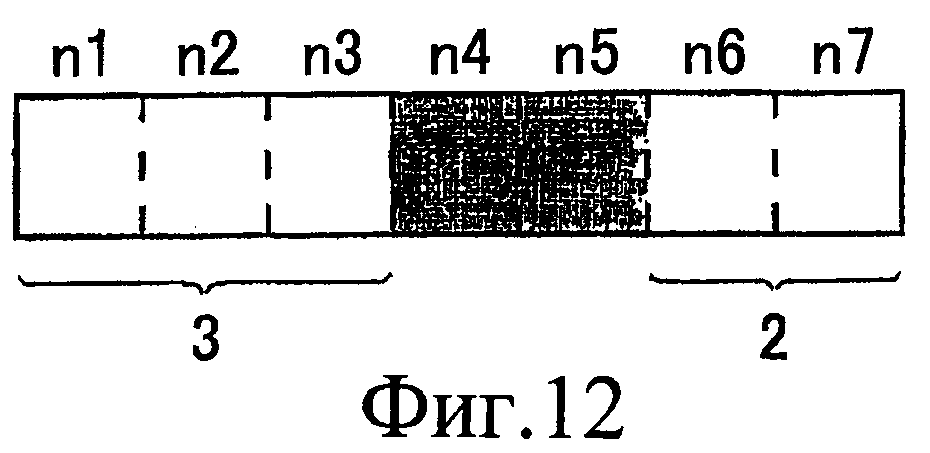
Кроме того, как показано на Фиг.12, в случае, когда группа полос соединения дорог перед направляющим перекрестком состоит из полос с n1 по n7 и рекомендованными полосами являются полосы n4 и n5, количество полос слева от рекомендованных полос равно 3, а количество полос справа от рекомендованных полос равно 2. В этом случае средство обработки для определения положения рекомендованных полос определяет, что рекомендованные полосы находятся справа в соединении дорог.
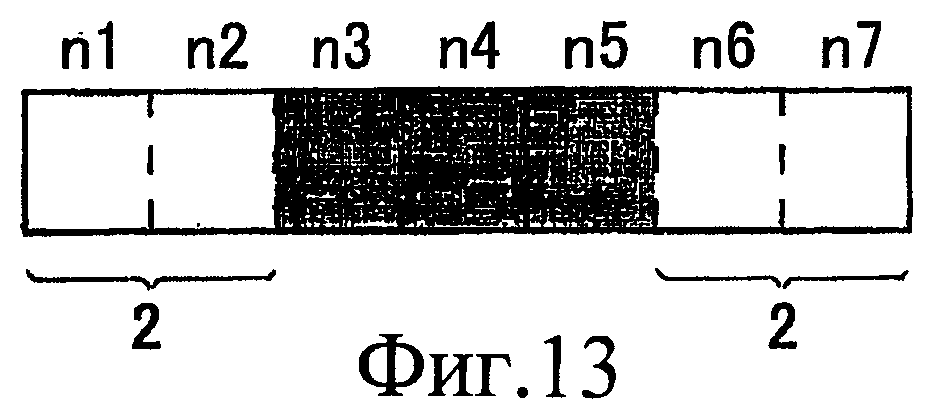
Кроме того, как показано на Фиг.13, в случае, когда группа полос соединения дорог перед направляющим перекрестком состоит из полос с n1 по n7 и рекомендованными полосами являются полосы с n3 по n5, количество полос слева от рекомендованных полос и количество полос справа от рекомендованных полос равно и там и там 2. В этом случае средство обработки для определения положения рекомендованных полос определяет, что рекомендованные полосы находятся в центре соединения дорог.
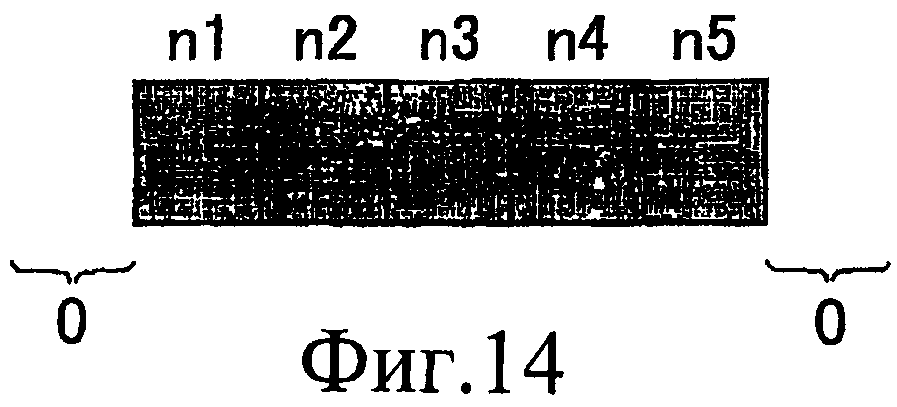
Кроме того, как показано на Фиг.14, в случае, когда группа полос соединения дорог перед направляющим перекрестком состоит из полос с n1 по n5 и рекомендованными полосами являются полосы с n1 по n5, количество полос слева от рекомендованных полос и количество полос справа от рекомендованных полос и там и там равно 0. В этом случае средство обработки для определения положения рекомендованных полос определяет, что рекомендованные полосы находятся в центре соединения дорог.
Таким образом, когда определено положение рекомендованной полосы в соединении дорог перед направляющим перекрестком, средство обработки для определения области отображения в средстве обработки для регулировки области отображения выполняет обработку для определения области отображения, и в результате определения в ходе обработки положения рекомендованной полосы на основе положения списка полос определяется область отображения списка полос.
В частности, в соединении дорог перед направляющим перекрестком в случае, когда рекомендованная полоса находится слева в соединении дорог, можно считать, что существует высокая вероятность того, что водитель поедет по левой стороне дороги по отношению к положению проводимого транспортного средства относительно рекомендованной полосы на направляющем перекрестке. Таким образом, средство обработки для определения области отображения определяет область отображения так, что среди полос в списке полос крайние левые полосы уместятся в том случае, когда рекомендованная полоса находится в соединении дорог слева.
Кроме того, в соединении дорог перед направляющим перекрестком в случае, когда рекомендованная полоса находится справа в соединении дорог, можно считать, что существует высокая вероятность того, что водитель поедет по правой стороне дороги относительно положения проводимого транспортного средства к рекомендованной полосе на направляющем перекрестке. Таким образом, в случае, когда рекомендованная полоса находится справа в соединении дорог, средство обработки для определения области отображения определяет область отображения таким образом, чтобы среди полос в списке полос уместились крайние правые полосы.
Кроме того, в соединении дорог перед направляющим перекрестком в случае, когда рекомендованная полоса находится в центре соединения дорог, средство обработки для определения области отображения определяет область отображения на основе направления выезда на направляющем перекрестке.
То есть, в случае, когда направлением выезда на направляющем перекрестке является направление влево, можно считать, что существует высокая вероятность того, что водитель поедет по левой стороне дороги от местоположения проводимого транспортного средства к рекомендуемой полосе в соединении дорог перед направляющим перекрестком. Таким образом, в случае, когда найденный маршрут установлен так, что транспортное средство будет выполнять левый поворот, средство обработки для определения области отображения определяет область отображения так, чтобы среди полос в списке полос уместились крайние левые полосы.
Кроме того, в случае, когда направлением выезда на направляющем перекрестке является направление вправо, можно считать, что существует высокая вероятность того, что водитель поедет по правой стороне дороги от местоположения проводимого транспортного средства к рекомендуемой полосе в соединении дорог перед направляющим перекрестком. Таким образом, в случае, когда найденный маршрут установлен так, что транспортное средство будет выполнять правый поворот, средство обработки для определения области отображения устанавливает область отображения так, чтобы среди полос в списке полос уместились крайние правые полосы.
Кроме того, в случае, когда направлением выезда на направляющем перекрестке является направление прямо, можно считать, что существует высокая вероятность того, что водитель поедет по центру дороги от местоположения проводимого транспортного средства к рекомендуемой полосе в соединении дорог перед направляющим перекрестком. Таким образом, в случае, когда найденный маршрут установлен так, что транспортное средство будет двигаться прямо, средство обработки для определения области отображения устанавливает область отображения так, чтобы в ней уместилась средняя часть списка полос.
Следует отметить, что в случае, когда рекомендованная полоса находится в центре в соединении дорог, средство обработки для определения области отображения может определить область отображения так, чтобы в ней уместились все группы полос в соединении дорог перед направляющим перекрестком. Кроме того, в случае, когда рекомендованная полоса находится в центре в соединении дорог, обычно предпочтительно, чтобы транспортное средство двигалось по левой стороне, и тогда средство обработки для определения области отображения может определить область отображения, так чтобы в нее уместились крайние левые полосы из числа полос в списке полос. Кроме того, в случае, когда рекомендованная полоса находится в центре соединения дорог, средство обработки для определения области отображения может определить область отображения после удаления полос с левой стороны и правой стороны, так чтобы в области отображения уместилась средняя часть из числа полос в списке полос.
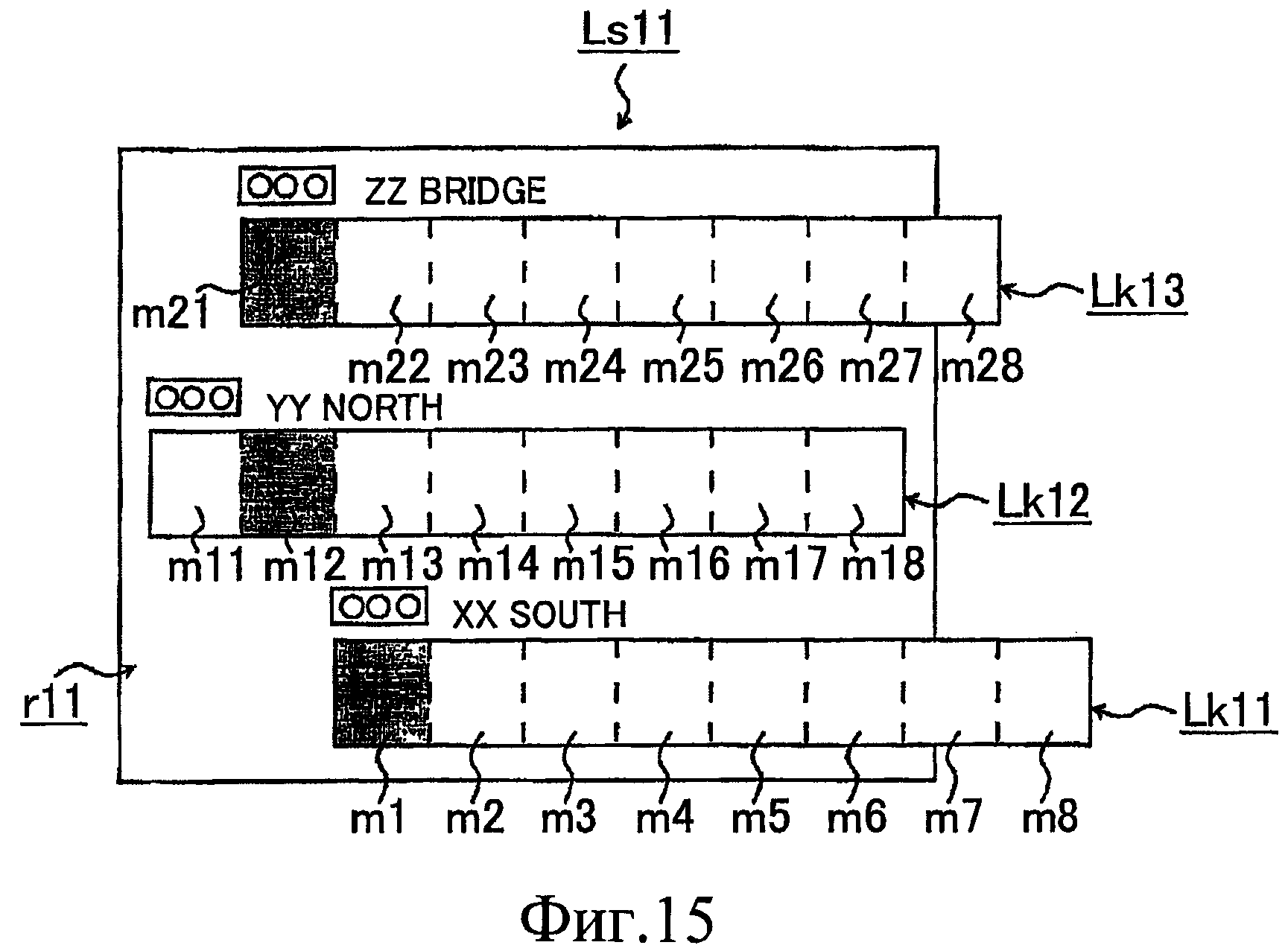
Следовательно, как показано, например, на Фиг.15, в случае, когда группа полос соединения дорог перед перекрестком "ZZ Bridge", являющимся направляющим перекрестком, состоит из полос с m21 по m28, и полоса m21 является рекомендованной полосой, количество полос слева от рекомендованной полосы равно 0, а количество полос справа от рекомендованной полосы равно 7. В этом случае средство обработки для определения положения рекомендованной полосы определяет, что рекомендованная полоса находится слева в соединении дорог.
Кроме того, средство обработки для определения области отображения определяет область отображения так, чтобы в ней поместилась крайняя левая полоса m11 из списка Ls11 полос из числа полос с m1 по m8, с m11 по m18 и с m21 по m28. В результате из области отображения удаляются полосы m7, m8 и m28.
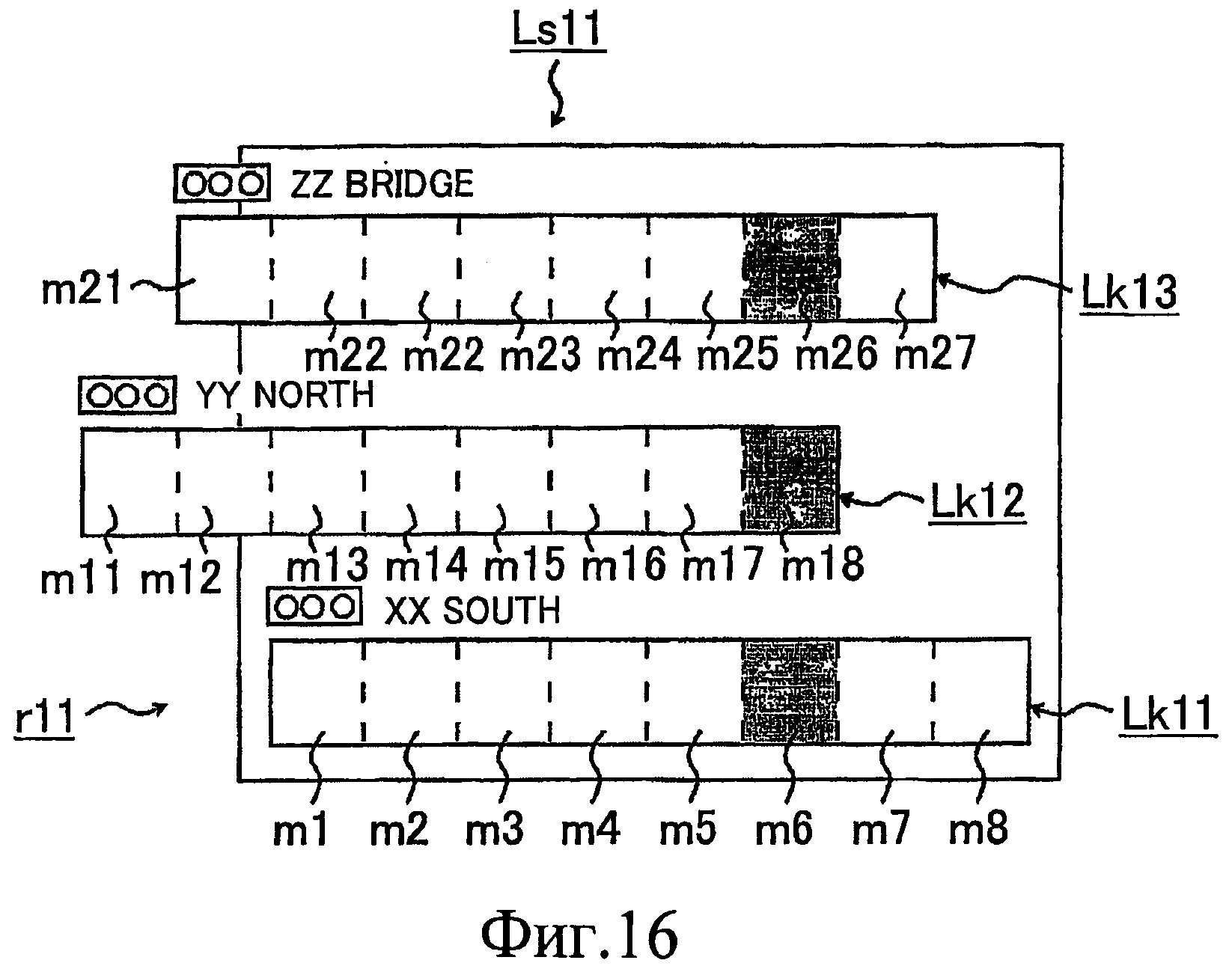
Кроме того, как показано, например, на Фиг.16, в случае, когда рекомендованными полосами являются полосы m6, m18 и m26, группа соединений дорог перед перекрестком "ZZ Bridge", являющимся направляющим перекрестком, состоит из полос с m21 по m27, а рекомендованной полосой является полоса m26. Таким образом, количество полос слева от рекомендованной полосы равно 6, а количество полос справа от рекомендованной полосы равно 1. В этом случае средство обработки для определения положения рекомендованной полосы определяет, что рекомендованная полоса находится справа в соединении дорог.
Кроме того, средство обработки для определения области отображения определяет область отображения, так чтобы в нее уместилась крайняя правая полоса m8 из списка Ls11 полос из числа полос с m1 по m8, с m11 по m18 и c m21 по m28.
Таким путем область отображения списка полос определяют на основе положения рекомендованной полосы в соединении дорог перед направляющим перекрестком, а полосы, отображать которые нет особой необходимости, удаляются из области отображения. Таким образом, можно надежно отображать главную часть списка полос, учитывающую соединения между полосами.
Кроме того, поскольку нет необходимости уменьшать размеры каждой из визуализируемых полос, можно предотвратить ухудшение видимости списка полос.
Далее поясняется блок-схема на Фиг.4.
Этап S1: Определяется, является ли список полос списком, учитывающим соединения. В том случае, когда список полос учитывает соединения, процесс обработки переходит к этапу S2, а в случае, когда список полос не является списком полос, учитывающим соединения, процесс обработки переходит к этапу Возврат.
Этап S2: Определяется, превышает ли размер списка полос максимальную область визуализации. В случае, когда размер списка полос превышает максимальную область визуализации, процесс обработки переходит к этапу S3, а в случае, когда размер списка полос меньше или равен максимальной области визуализации, процесс обработки переходит к этапу Возврат.
Этап S3: Определяется положение рекомендованной полосы в соединении дорог перед направляющим перекрестком.
Этап S4: На основе положения рекомендованной полосы определяется область, подлежащая отображению, и процесс обработки переходит к этапу Возврат.
Далее поясняется второй вариант осуществления настоящего изобретения. Следует отметить, что части, структура которых идентична аналогичным частям первого варианта осуществления, обозначены одинаковыми ссылочными позициями, а результаты изобретения, имеющие место благодаря идентичной структуре, являются составной частью результатов этого варианта осуществления.
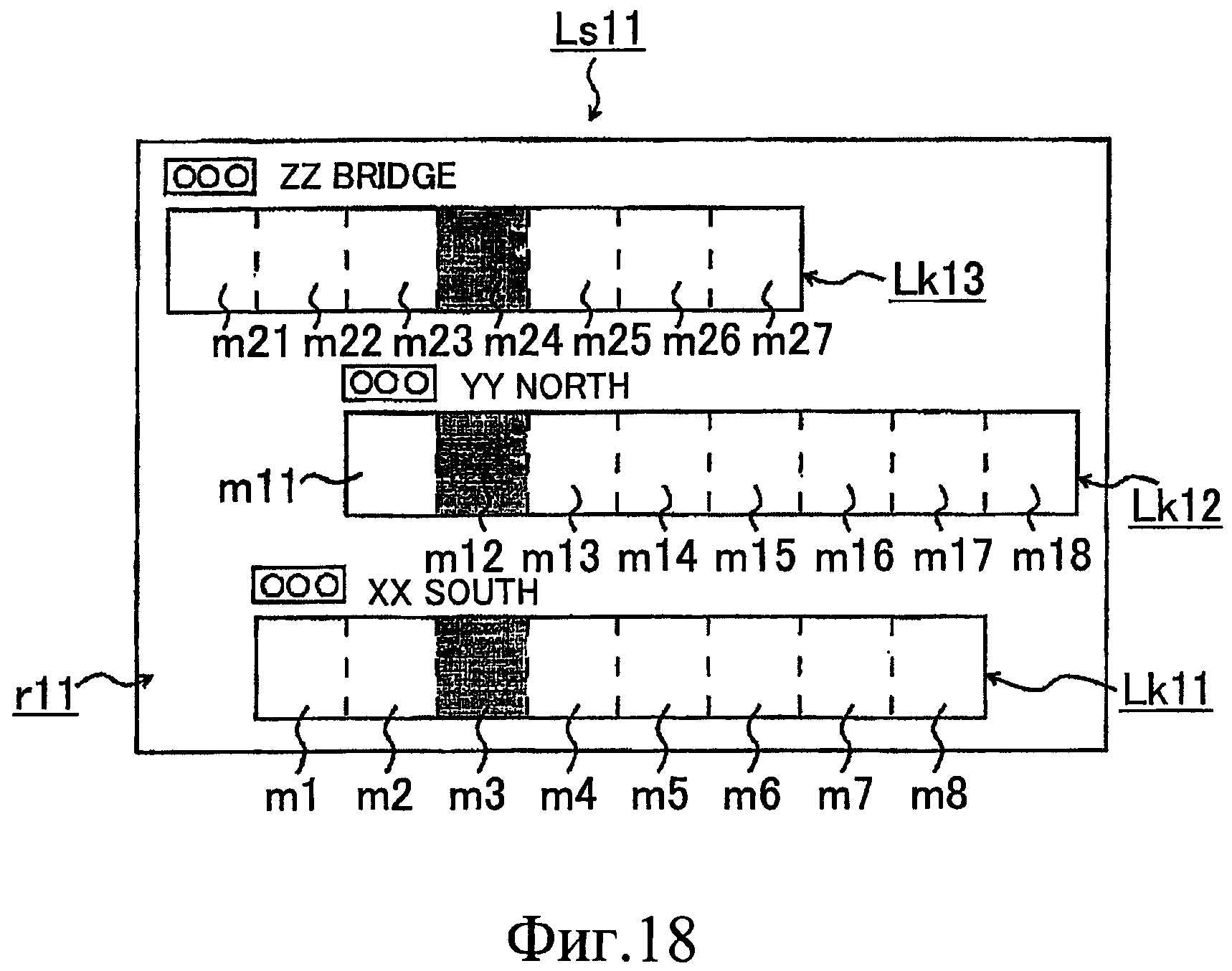
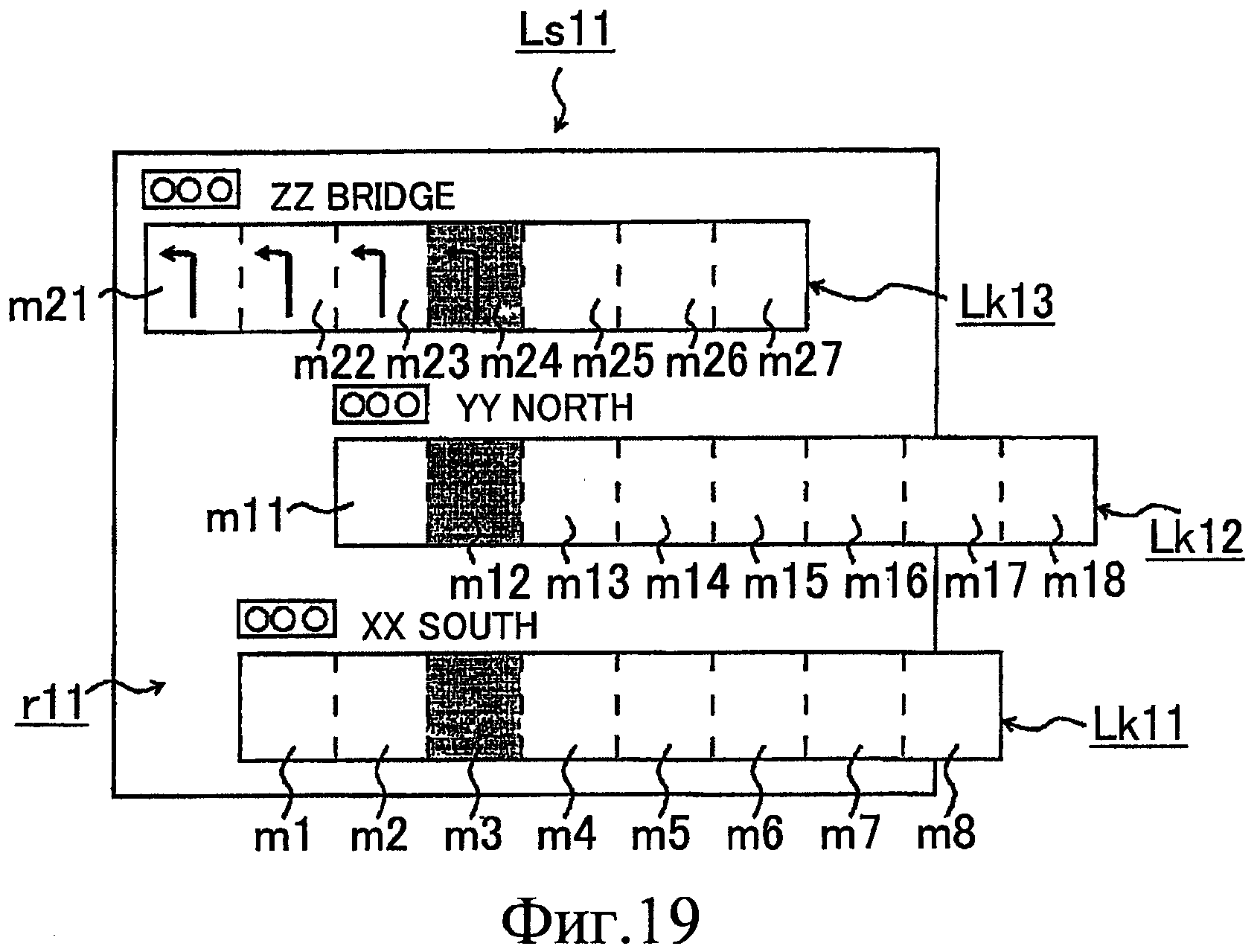
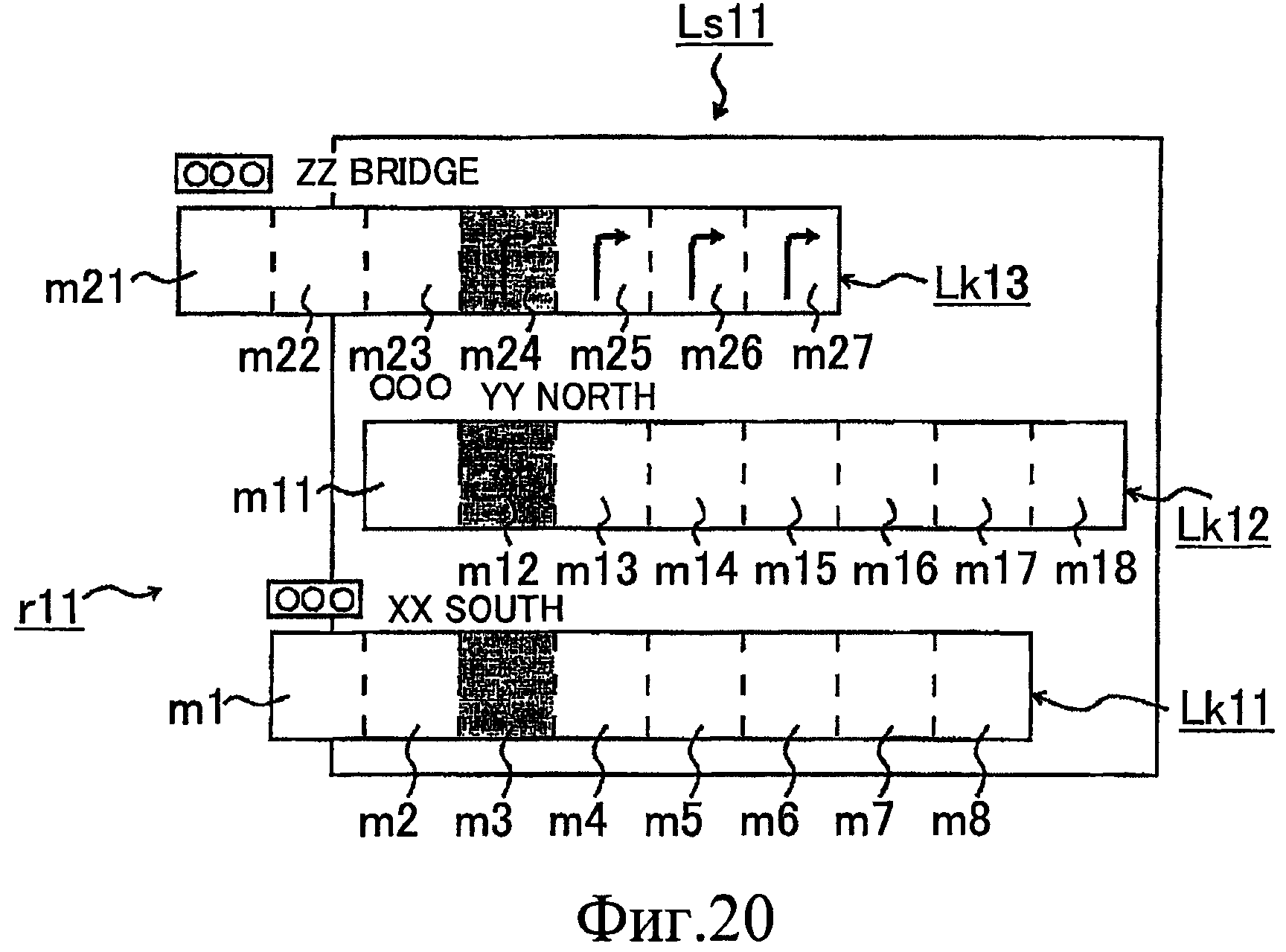
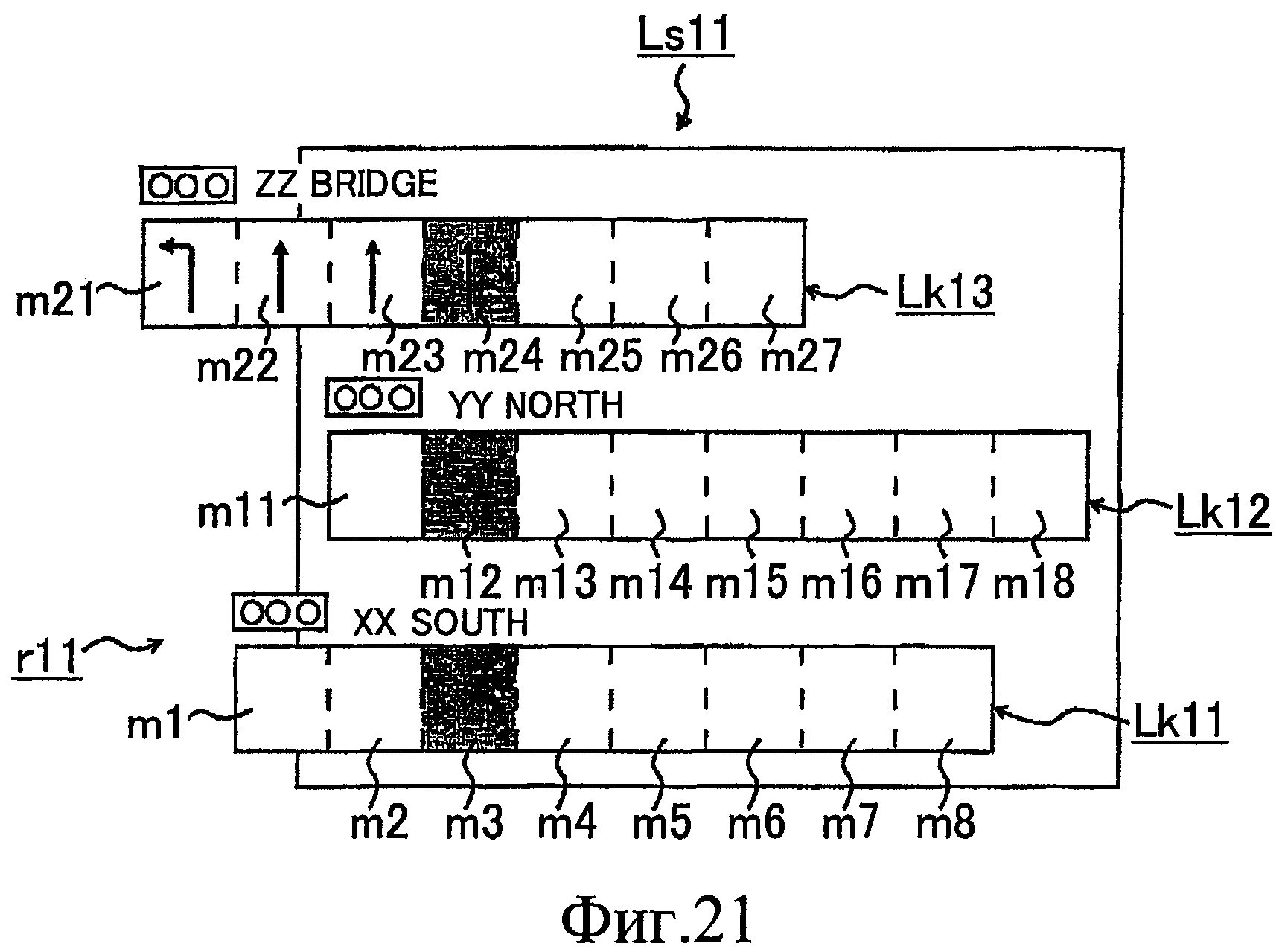
На Фиг.17 представлена блок-схема, иллюстрирующая работу средства обработки отображения полос во втором варианте осуществления настоящего изобретения. На Фиг.18 представлен чертеж, иллюстрирующий пример отображения списка полос, учитывающего соединения между полосами, во втором варианте осуществления настоящего изобретения. На Фиг.19 представлен первый чертеж, иллюстрирующий пример отображения списка полос во втором варианте осуществления настоящего изобретения. На Фиг.20 представлен второй чертеж, иллюстрирующий пример отображения списка полос во втором варианте осуществления настоящего изобретения. На Фиг.21 представлен третий чертеж, иллюстрирующий пример отображения списка полос во втором варианте осуществления настоящего изобретения.
В этом случае группа Lk11 состоит из полос с m1 по m8, группа Lk12 состоит из полос с m11 по m18, а группа Lk13 состоит из полос с m21 по m27, причем в группах полос с Lk11 по Lk13 в качестве рекомендованных полос отображаются полосы m3, m12 и m24.
Кроме того, в настоящем варианте осуществления средство обработки для регулировки области отображения регулирует область отображения списка полос, с тем чтобы она соответствовала максимальной области визуализации, на основе структуры группы полос в соединении дорог, или, как в настоящем варианте осуществления, на основе направлении выезда на направляющем перекрестке, причем указанное средство обработки выбирает заранее определенные полосы и отображает только выбранные полосы.
Кроме того, средство обработки для определения направления выезда в средстве обработки для регулировки области отображения выполняет обработку для определения направления выезда, в результате чего определяется направление выезда на перекрестке, то есть направление выезда на перекрестке "ZZ Bridge" в примере на Фиг.18. Таким образом, средство обработки для определения направления выезда считывает данные о перекрестке, данные о полосах и т.п., определяет направление выезда на направляющем перекрестке и выясняет, является ли направление выезда направлением влево, вправо или прямо по ходу движения.
Далее, когда определено направление выезда на направляющем перекрестке, в результате обработки для определения направления выезда, в этом случае средство обработки для определения области отображения определяет область отображения списка полос на основе ориентации направления выезда.
В частности, в случае, когда направлением выезда на направляющем перекрестке является направление влево, можно считать, что имеется высокая вероятность того, что водитель поедет влево по дороге от местоположения проводимого транспортного средства к рекомендованной полосе в соединении дорог перед направляющим перекрестком. Таким образом, средство обработки для определения области отображения определяет область отображения, так чтобы в нее попали самые левые полосы среди полос в списке полос в том случае, когда направлением выезда на направляющем перекрестке является направление влево.
Кроме того, в случае, когда направлением выезда на направляющем перекрестке является направление вправо, можно считать, что имеется высокая вероятность того, что водитель поедет вправо по дороге от местоположения проводимого транспортного средства к рекомендованной полосе в соединении дорог перед направляющим перекрестком. Таким образом, средство обработки для определения области отображения определяет область отображения, так чтобы в нее попали самые правые полосы среди полос в списке полос в том случае, когда направлением выезда на направляющем перекрестке является направление вправо.
Кроме того, в случае, когда направлением выезда на направляющем перекрестке является направление вперед, считается, что имеется высокая вероятность, что водитель поедет по центральной части дороги от местоположения проводимого транспортного средства к рекомендованной полосе в соединении дорог перед направляющим перекрестком. Таким образом, средство обработки для определения области отображения определяет область отображения, так чтобы в нее попала средняя часть списка полос в том случае, когда направлением выезда на направляющем перекрестке является направление вперед.
Следует отметить, что в случае, когда направлением выезда на направляющем перекрестке является направление вперед, средство обработки для определения области отображения может определить область отображения так, чтобы в ней уместились все группы из соединений дорог перед направляющим перекрестком. Кроме того, в случае, когда направлением выезда на направляющем перекрестке является направление вперед, средство обработки для определения области отображения обычно может определить область отображения так, чтобы в ней уместились крайние левые полосы из числа полос в списке полос, поскольку предпочтительно, чтобы транспортное средство двигалось по левой стороне дороги.
Следовательно, как показано, например, на Фиг.19, в случае, когда полосы с m21 по m24 в группе полос соединения дорог перед перекрестком "ZZ Bridge", который является направляющим перекрестком, являются левоповоротными полосами, средство обработки для определения направления выезда определяет, что направлением выезда на этом направляющем перекрестке является направление влево.
Кроме того, средство обработки для определения области отображения определяет область отображения так, чтобы в ней уместилась самая левая полоса m21 из числа полос с m1 по m8, с m11 по m18 и с m21 по m27 в списке Ls11 полос. В результате из области отображения удаляются полосы m8, m17 и m18.
Кроме того, как показано, например, на Фиг.20, в случае, когда полосы с m24 по m27 в группе полос соединения дорог перед перекрестком "ZZ Bridge", который является направляющим перекрестком, являются правоповоротными полосами, средство обработки для определения направления выезда определяет, что направлением выезда на этом направляющем перекрестке является направление вправо.
Кроме того, средство обработки для определения области отображения определяет область отображения так, чтобы в ней уместилась самая правая полоса m18 из числа полос с m1 по m8, с m11 по m18 и с m21 по m27 в списке Ls11 полос. В результате из области отображения удаляются полосы m1, m21 и m22.
Кроме того, как показано, например, на Фиг.21, в случае, когда полоса m1 в группе полос соединения дорог перед перекрестком "ZZ Bridge", который является направляющим перекрестком, являются левоповоротной полосой, а полосы с m2 по m4 являются сквозными полосами, средство обработки для определения направления выезда определяет, что направлением выезда на этом направляющем перекрестке является направление вперед.
Кроме того, средство обработки для определения области отображения определяет область отображения так, чтобы в ней уместилась центральная часть списка Ls11 полос. В результате из области отображения исключаются полосы m1, m21 и m22.
Таким путем область отображения списка полос определяется на основе направления выезда на направляющем перекрестке, а полосы, отображать которые нет особой необходимости, удаляются из области отображения. Таким образом, можно надежно отображать главную часть списка полос, учитывающую соединения между полосами.
Кроме того, поскольку нет необходимости уменьшать размеры каждой из визуализируемых полос, можно предотвратить ухудшение видимости списка полос.
Далее поясняется блок-схема на Фиг.17.
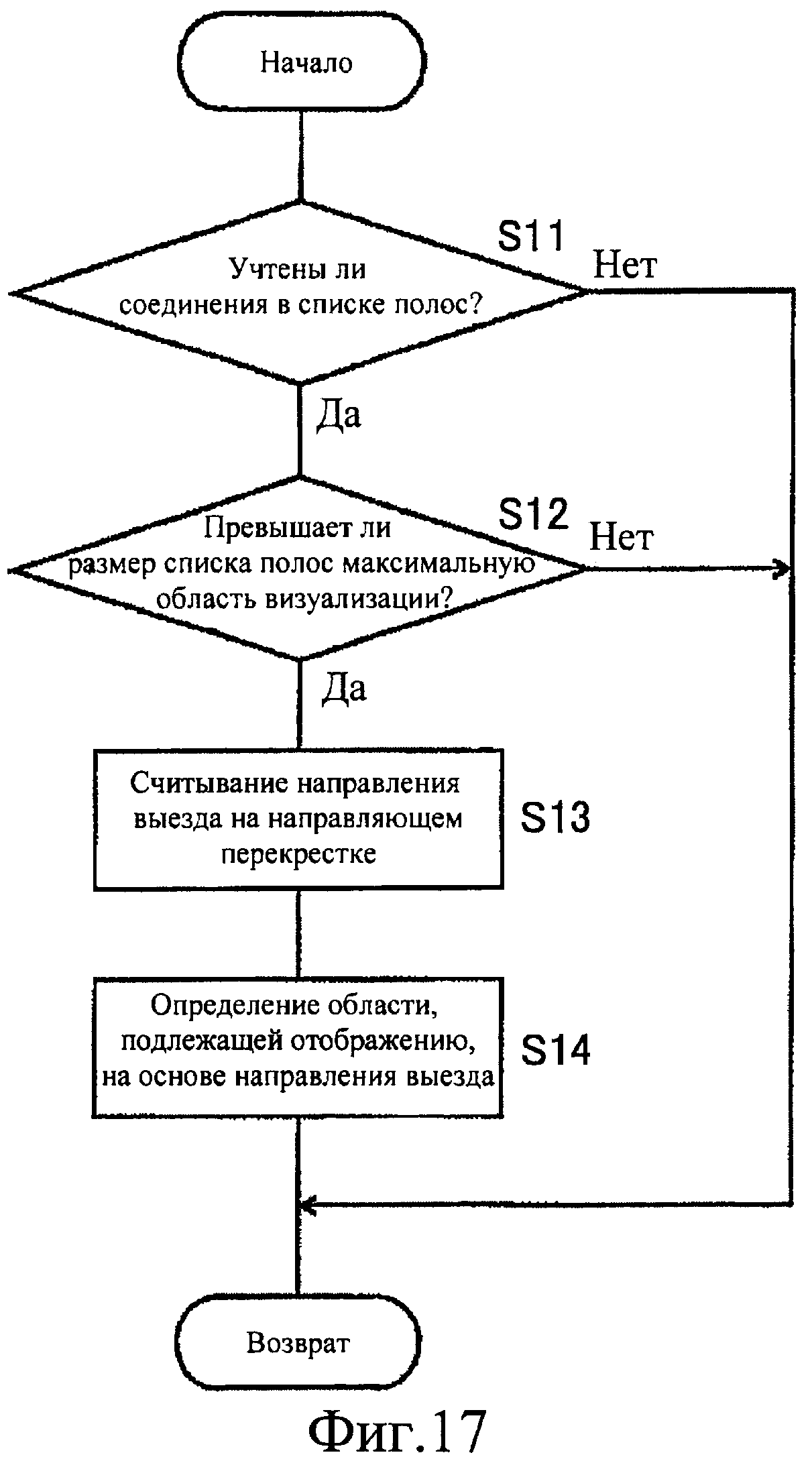
Этап S11: Определяется, является ли список полос списком, учитывающим соединения. В том случае, когда список полос учитывает соединения, процесс обработки переходит к этапу S12, а в случае, когда список полос не является списком полос, учитывающим соединения, процесс обработки переходит к этапу Возврат.
Этап S12: Определяется, превышает ли размер списка полос максимальную область визуализации. В случае, когда размер списка полос превышает максимальную область визуализации, процесс обработки переходит к этапу S13, а в случае, когда размер списка полос меньше или равен максимальной области визуализации, процесс обработки переходит к этапу Возврат.
Этап S13: Считывается направление выезда на направляющем перекрестке.
Этап S14: На основе направления выезда определяют область, подлежащую отображению, и процесс обработки переходит к этапу Возврат.
Следует отметить, что настоящее изобретение не ограничивается указанными вариантами осуществления и допускает различные модификации на основе существа настоящего изобретения, причем эти модификации не выходят за рамки объема настоящего изобретения.
Промышленная применимость
Настоящее изобретение можно применять в навигационных системах для отображения полос из списка полос.
Реферат
Изобретение относится к навигации, а именно к системам и программам проведения по маршруту. Система проведения по маршруту включает в себя: блок обнаружения текущего местоположения; средство обработки установки списка полос, которое создает список полос (Ls1), учитывающий соединения между полосами для групп полос (от Lk1 по Lk3) в соединениях дорог, имеющихся на участке отображения списка дорог; средство обработки для определения области визуализации, которое определяет, превышает ли количество полос в списке полос (Ls1) количество полос, которое было установлено в блоке отображения; и средство обработки и регулировки области отображения, которое выбирает заранее определенные полосы в списке полос (Ls1) и отображает только выбранные полосы. Полосы, в отображении которых нет особой необходимости, могут быть удалены. Технический результат - возможность отображения карты проведения по полосам, которая учитывает соединения между полосами, предотвращая тем самым ухудшение видимости карты проведения по полосам. 2 н. и 2 з.п. ф-лы, 21 ил.
Формула
средства обработки определения области визуализации, которое определяет, превышает ли количество полос в списке полос количество полос, которое было установлено в блоке отображения; и средства обработки регулировки области отображения, которое в том случае, когда количество полос в списке полос превышает количество полос, которое было установлено в блоке отображения, выбирает заранее определенную полосу в списке полос и отображает только выбранную полосу.
Документы, цитированные в отчёте о поиске
Навигационное устройство с сенсорным экраном
Комментарии