Способ остановки поворотной двери транспортного средства и соответствующее транспортное средство (варианты) - RU2684964C2
Код документа: RU2684964C2
Чертежи




Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Это раскрытие относится к автоматическому управлению дверями транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Объекты, такие как велосипеды, могут сталкиваться с дверями транспортного средства. Необходимо решение для предотвращения или препятствования столкновению между велосипедами и дверями транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Транспортное средство включает в себя: каркас, поворотную дверь; замедлитель, содержащий: рычаг, продолжающийся сквозь избирательный затвор, включающий в себя: верхнюю и нижнюю пружины, соответственно поджимающие верхний и нижний ролики вплотную к рычагу; верхний и нижний стопоры, выполненные с возможностью, при приведении в действие, прижимать верхний и нижний ролики вплотную к рычагу, таким образом, останавливая поворачивание двери; датчики, процессор(ы), выполненный с возможностью: вводить в действие и выводить из работы стопоры на основании распознанных событий.
Согласно некоторым вариантам осуществления, дверь выполнена с возможностью поворачиваться и шарнирно вращаться вокруг каркаса; при этом, замедлитель выполнен с возможностью поворачиваться и шарнирно вращаться вокруг каркаса; при этом, избирательный затвор прикреплен к двери.
Согласно некоторым вариантам осуществления, верхний стопор содержит: (a) верхний линейный двигатель или соленоид, (b) верхний вертикальный исполнительный механизм и (c) верхний тормоз.
Согласно некоторым вариантам осуществления, верхний вертикальный исполнительный механизм продолжается по центральной оси верхней пружины, когда верхний стопор является действующим.
Согласно некоторым вариантам осуществления, при вводе в действие верхнего стопора, верхний линейный двигатель или соленоид выдвигают верхний вертикальный исполнительный механизм вниз, что приводит верхний тормоз вплотную к верхнему ролику.
Согласно некоторым вариантам осуществления, при вводе в действие верхнего стопора, верхний стопор приводит верхний тормоз вплотную к верхнему ролику до тех пор, пока верхний стопор не выведен из работы.
Согласно некоторым вариантам осуществления, нижний стопор содержит: (a) нижний линейный двигатель или соленоид, (b) нижний вертикальный исполнительный механизм и (c) нижний тормоз.
Транспортное средство включает в себя: поворотную дверь, замедлитель, содержащий: верхний и нижний стопоры, выполненные с возможностью, при приведении в действие, прижимать верхний и нижний ролики вплотную к рычагу, таким образом, останавливая поворачивание двери; датчики, процессор(ы), выполненный с возможностью: вводить в действие и выводить из работы стопоры на основании распознанных событий.
Согласно некоторым вариантам осуществления, процессор(ы) выполнен с возможностью: определять, что расчетная траектория выявленного объекта пересекает дверь; вводить в действие стопоры на основании определения.
Согласно некоторым вариантам осуществления, процессор(ы) выполнен с возможностью: определять пересечение траектории выявленного объекта с дверью на основании положения распахивания двери.
Согласно некоторым вариантам осуществления, положение распахивания двери является дуговым и включает в себя закрытое положение двери, полностью открытое положение двери и промежуточные положения двери.
Согласно некоторым вариантам осуществления, процессор(ы) выполнен с возможностью: определять, что дверь является действующей, опираясь на датчик(и) ремня безопасности или датчик(и) нагрузки сиденья; рассчитывать траекторию выявленного объекта относительно двери, только когда дверь определена действующей.
Согласно некоторым вариантам осуществления, дверь является водительской дверью, а замедлитель является замедлителем водительской двери, транспортное средство содержит пассажирскую дверь, присоединенную к замедлителю пассажирской двери, а процессор(ы) выполнен с возможностью: определять, что пассажирская дверь является действующей, опираясь на датчик(и) пассажирского ремня безопасности или датчик(и) нагрузки пассажирского сиденья; определять, что расчетная траектория выявленного объекта пересекает пассажирскую дверь, но только когда пассажирская дверь является действующей; вводить в действие стопоры замедлителя пассажирской двери на основании определения.
Согласно некоторым вариантам осуществления, процессор(ы) выполнен с возможностью: измерять нагрузку, приложенную к стопорам; выводить из работы стопоры, когда измеренная нагрузка превышает заданное значение заданное количество раз.
Раскрыт способ остановки поворотной двери транспортного средства, включающего в себя датчики, дверь и замедлитель, имеющий: верхний и нижний стопоры, выполненные с возможностью, при вводе в действие, прижимать верхний и нижний ролики вплотную к рычагу, таким образом, останавливая поворачивание двери; способ содержит, посредством процессора(ов) транспортного средства: ввод в действие и вывод из работы стопоров на основании распознанных событий.
Согласно некоторым вариантам осуществления, способ содержит: определение, что расчетная траектория выявленного объекта пересекает положение распахивания двери; ввод в действие стопоров на основании определения.
Согласно некоторым вариантам осуществления, положение распахивания двери является дуговым и включает в себя закрытое положение двери, полностью открытое положение двери и промежуточные положения двери.
Согласно некоторым вариантам осуществления, способ содержит: определение, что дверь является действующей, опираясь на датчик(и) ремня безопасности или датчик(и) нагрузки сиденья; расчет траектории выявленного объекта относительно двери, только когда дверь определена действующей.
Согласно некоторым вариантам осуществления, дверь является водительской дверью, а замедлитель является замедлителем водительской двери, транспортное средство включает в себя пассажирскую дверь, присоединенную к замедлителю пассажирской двери, и способ содержит: определение, что пассажирская дверь является действующей, опираясь на датчик(и) пассажирского ремня безопасности или датчик(и) нагрузки пассажирского сиденья; определение, что расчетная траектория выявленного объекта пересекает пассажирскую дверь, но только когда пассажирская дверь является действующей; ввод в действие стопоров замедлителя пассажирской двери на основании определения.
Согласно некоторым вариантам осуществления, способ содержит: измерение нагрузки, приложенной к стопорам; вывод из работы стопоров, когда измеренная нагрузка превышает заданное значение заданное множество раз.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ради лучшего понимания изобретения, можно обратиться к вариантам осуществления, показанным на нижеследующих чертежах. Компоненты на чертежах не обязательно находятся в масштабе, и связанные элементы могут быть пропущены или, в некоторых случаях, пропорции могли быть преувеличены, с тем чтобы подчеркнуть и ясно проиллюстрировать обладающие новизной признаки, описанные в материалах настоящей заявки. В дополнение, компоненты системы могут быть скомпонованы по-разному, как известно в данной области техники. Кроме того, на чертежах, одинаковые ссылочные позиции обозначают соответствующие части на всем протяжении нескольких видов.
Фиг. 1 - структурная схема вычислительной системы транспортного средства.
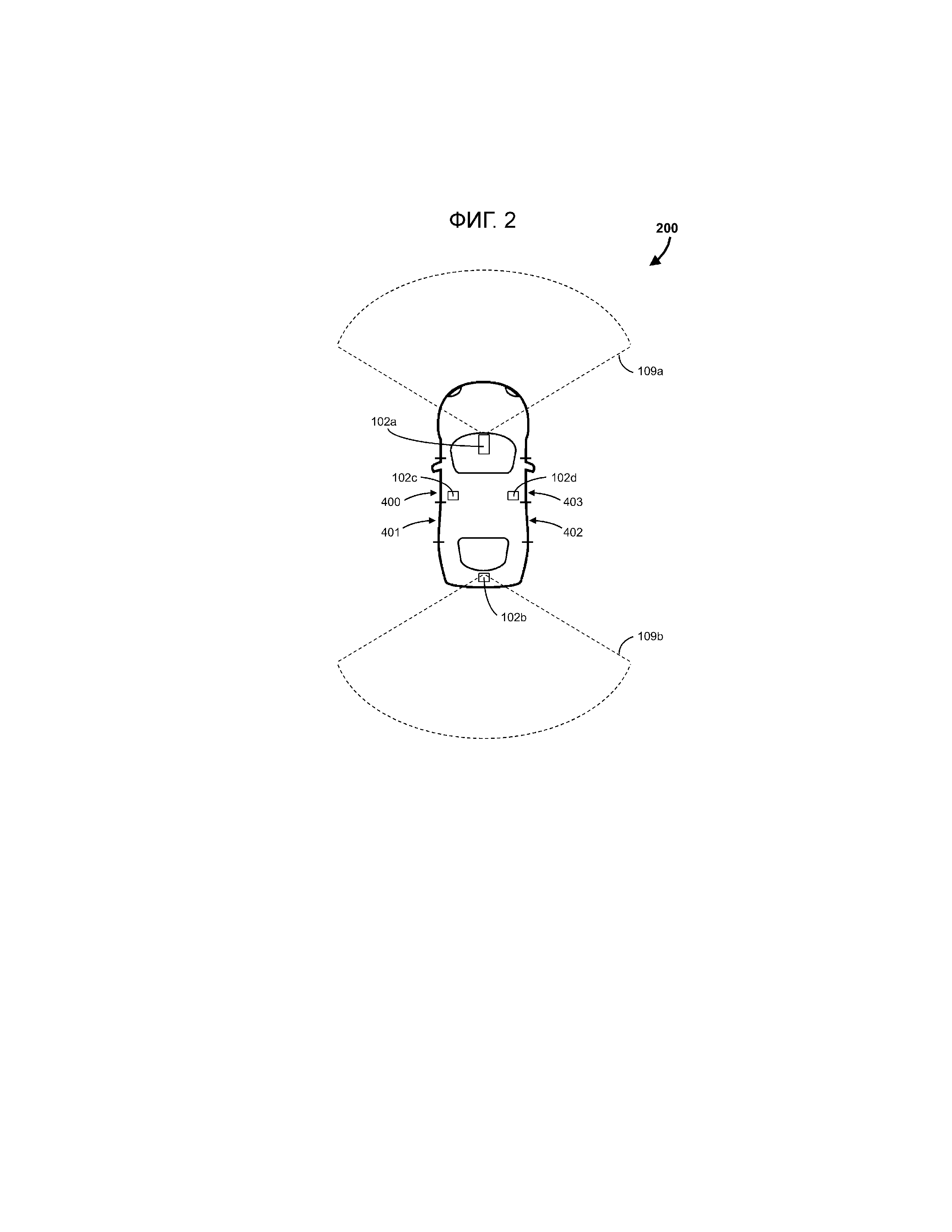
Фиг. 2 - вид сверху транспортного средства, включающего в себя вычислительную систему транспортного средства.
Фиг. 3a - вид сбоку замедлителя уровня техники с избирательным затвором, показанным в поперечном разрезе.
Фиг. 3b - вид сбоку нового избирательного затвора, показанного в местном поперечном разрезе.
Фиг. 4 - схема уровня техники замедлителя, прикрепленного к двери.
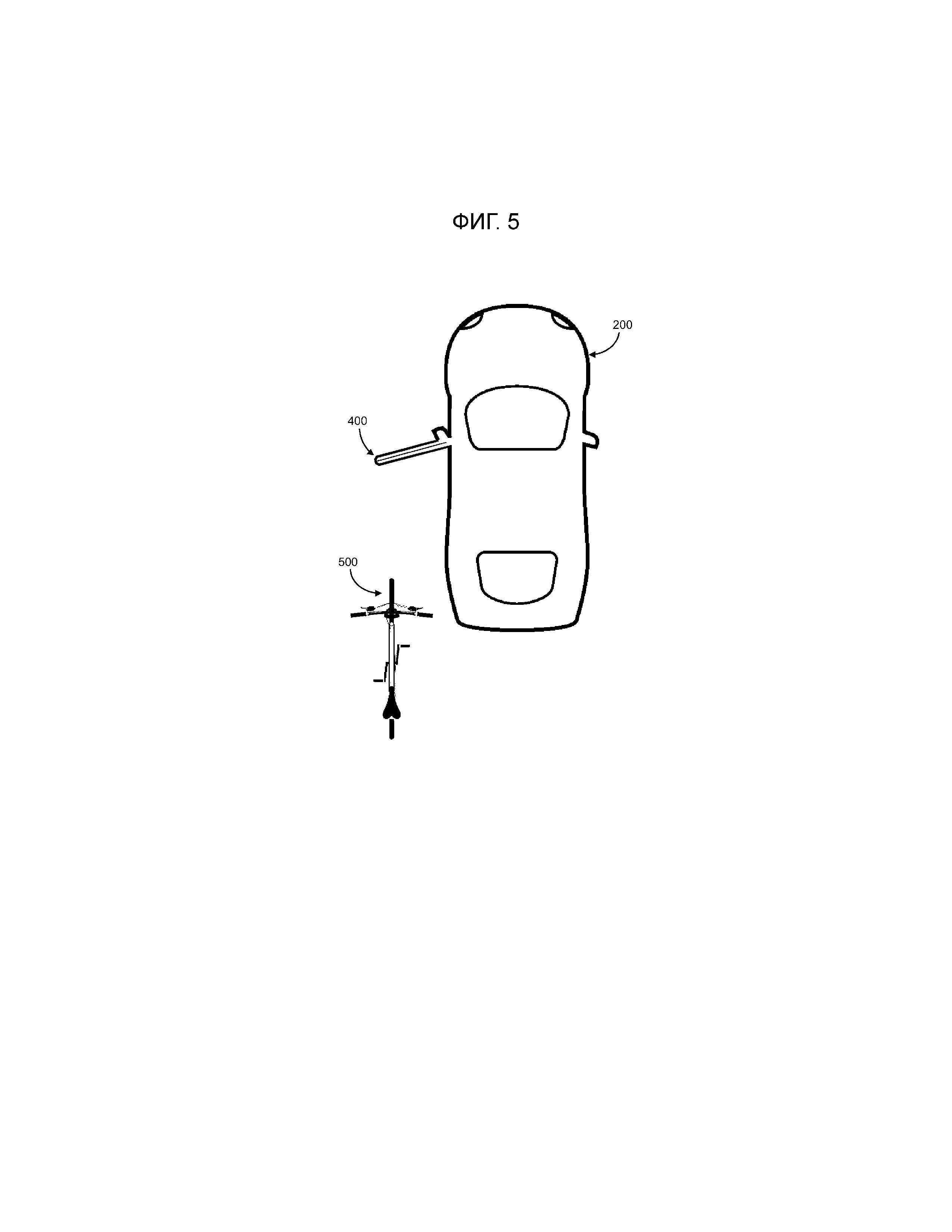
Фиг. 5 - вид сверху транспортного средства с открытой дверью.
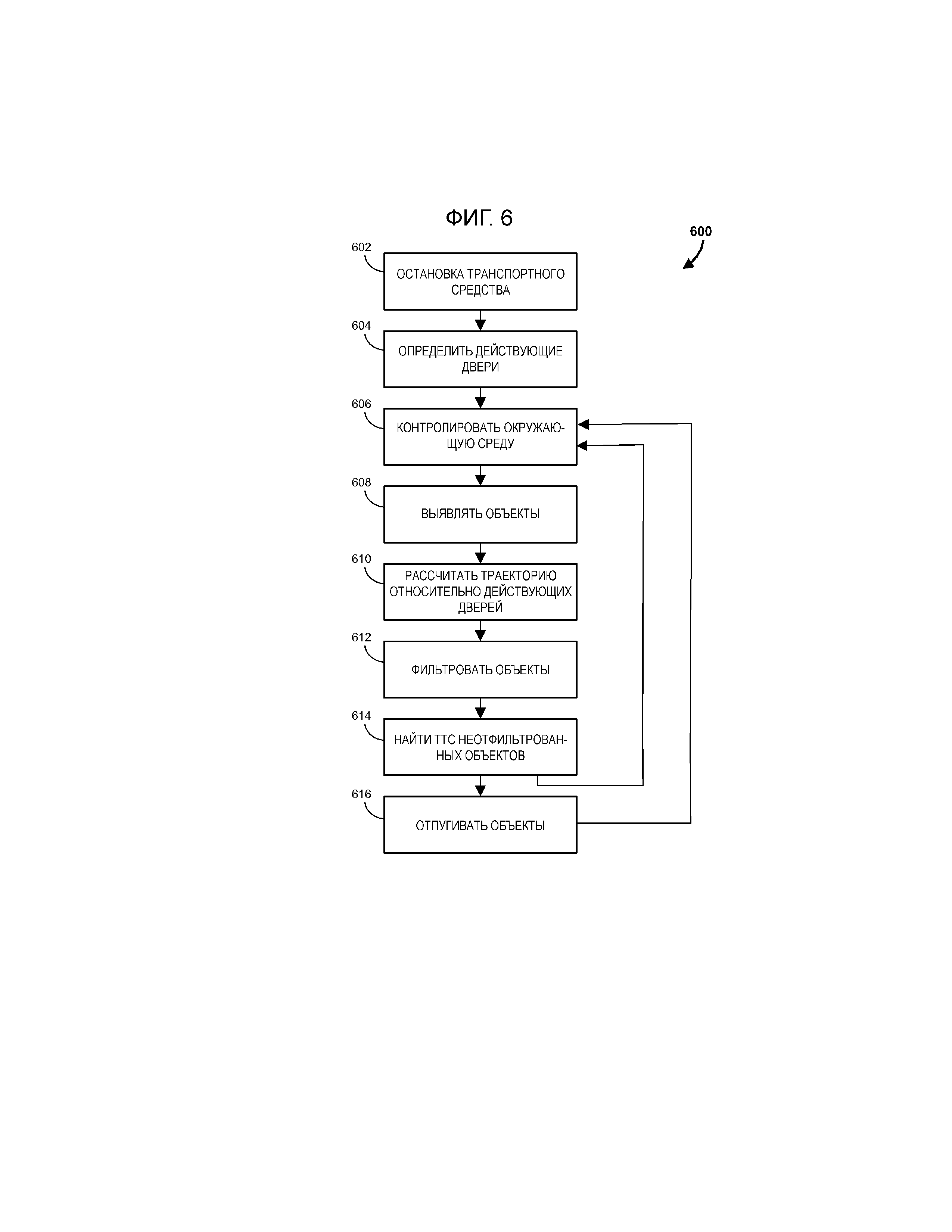
Фиг. 6 - структурная схема способа.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Несмотря на то, что изобретение может быть воплощено в различных формах, на чертежах показаны и будут описаны в дальнейшем некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее раскрытие должно считаться иллюстративным примером изобретения и не подразумевается, что должно ограничивать изобретение проиллюстрированными конкретными вариантами осуществления.
В этой заявке подразумевается, что использование разделительных союзов должно включать в себя соединительные союзы. Использование формы единственного числа не подразумевается указывающим мощность множества. В частности, подразумевается, что ссылка на объект также должна обозначать один из возможного множества таких объектов. Кроме того, союз «или» может использоваться для выражения признаков, которые присутствуют одновременно, в качестве одного из возможных вариантов, и взаимоисключающих альтернатив, в качестве другого возможного варианта. Другими словами, союз «или» следует понимать включающим в себя «и/или» в качестве одного из возможных вариантов и «любой из/или» в качестве другого возможного варианта.
Фиг. 1 показывает вычислительную систему 100 примерного транспортного средства 200. Транспортное средство 200 также указывается ссылкой как первое транспортное средство 200. Транспортное средство 200 включает в себя электродвигатель, аккумуляторную батарею, по меньшей мере одно колесо, приводимое в движение электродвигателем, и систему рулевого управления, выполненную с возможностью поворачивать по меньшей мере одно колесо вокруг оси. Транспортное средство 200 включает в себя множество дверей с 400 по 403. Транспортные средства, например, также описаны в патентной заявке США под № 14/991,496, на Miller и др. («Miller»), патенте США под № 8,180,547, Prasad и др. («Prasad»), патентной заявке США под № 15/186,850, Lavoie и др. («Lavoie») и патентной заявке США под № 14/972,761, Hu и др. («Hu»), все из которых настоящим во всей своей полноте содержатся в настоящей заявке посредством ссылки. Вычислительная система 100 предоставляет возможность автоматического управления механическими системами в транспортном средстве. Она также дает возможность обмена информацией с внешними устройствами. Вычислительная система 100 включает в себя шину 101 данных, один или более процессоров 108, энергозависимую память 107, энергонезависимую память 106, пользовательский интерфейс 105, телематический блок 104, исполнительные механизмы и электродвигатели 103, и локальные датчики 102.
Шина 101 данных транспортирует электронные сигналы или данные между электронными компонентами. Процессор 108 выполняет операции над электронными сигналами или данными, чтобы вырабатывать модифицированные электронные сигналы или данные. Энергозависимая память 107 хранит данные для непосредственной выборки процессором 108. Энергонезависимая память 106 хранит данные для выборки в энергозависимую память 107 и/или процессор 108. Энергонезависимая память 106 включает в себя диапазон энергонезависимых устройств памяти, в том числе, накопитель на жестких дисках, SSD (твердотельные диски), DVD (цифровые многофункциональные диски), Blu-Ray, и т. д. Пользовательский интерфейс 105 включает в себя устройства отображения, дисплеи с сенсорным экраном, клавиатуры, кнопки и другие устройства, которые дают возможность взаимодействия пользователя с вычислительной системой. Телематический блок 104 дает возможность как проводной, так и беспроводной связи с внешними процессорами через Bluetooth, сотовую систему передачи данных (например, 3G, LTE), USB, и т. д. Телематический блок 104 может быть выполнен с возможностью широковещательно передавать сигналы на определенной частоте.
Исполнительные механизмы/электродвигатели 103 создают физические результаты. Примеры исполнительных механизмов/двигателей включают в себя топливные форсунки, стеклоочистители, схемы тормозных фонарей, трансмиссии, подушки безопасности, моторы, электродвигатели силовой передачи, рулевой механизм, верхний и нижний стопоры 304, 305 (обсужденные ниже), и т. д. Локальные датчики 102 передают цифровые показания или измерения в процессор 108. Примеры пригодных датчиков включают в себя датчики температуры, датчики угла поворота, датчики ремня безопасности, датчики скорости, камеры, датчики с лазерным локатором, датчики с радиолокатором, и т. д. Следует принимать во внимание, что различные связанные компоненты по фиг. 1 могут включать в себя отдельные или специализированные процессоры и память. Дополнительные подробности о конструкции и операциях вычислительной системы 100, например, описаны в публикации Miller и/или Prasad.
Фиг. 2, в общем, показывает и иллюстрирует транспортное средство 200, которое включает в себя вычислительную систему 100. Хотя и не показано, транспортное средство 200 находится на оперативной беспроводной связи с переносным устройством, таким как мобильный телефон. Некоторые из локальных датчиков 102 установлены на внешней стороне транспортного средства 200. Локальный датчик 102a может быть ультразвуковым датчиком, датчиком с лазерным локатором, камерой, видеокамерой и/или микрофоном, и т. д. Локальный датчик 102a может быть выполнен с возможностью выявлять объекты, движущиеся впереди транспортного средства 200. Локальный датчик 102b может быть ультразвуковым датчиком, датчиком с лазерным локатором, камерой, видеокамерой и/или микрофоном, и т. д. Локальный датчик 102b может быть выполнен с возможностью выявлять объекты, движущиеся сзади транспортного средства 200, как указано задней областью 109b восприятия. Левый датчик 102c и правый датчик 102d могут быть выполнены с возможностью выполнять идентичные функции для левой и правой сторон транспортного средства 200. Транспортное средство 200 включает в себя ведущий узел других датчиков 102, расположенных во внутренней области транспортного средства или на внешней стороне транспортного средства. Эти датчики могут включать в себя какие-нибудь или все из датчиков, раскрытых в публикации Prasad.
Следует принимать во внимание, что транспортное средство 200 выполнено с возможностью выполнять способы и операции, описанные ниже. В некоторых случаях, транспортное средство 200 выполнено с возможностью выполнять эти функции с помощью компьютерных программ, хранимых на энергозависимых и/или энергонезависимых устройствах памяти вычислительной системы 100. Процессор выполнен с возможностью выполнять раскрытую операцию, когда процессор находится на оперативной связи с памятью, хранящей программно реализованную программу с управляющей программой или командами, воплощающими раскрытую операцию. Дополнительное описание того, каким образом совместно действуют процессор, устройства памяти и программы, фигурирует в публикации Prasad. Следует принимать во внимание, что переносное устройство или внешний сервер на оперативной связи с транспортным средством 200 выполняют некоторые или все из способов и операций, обсужденных ниже.
Согласно различным вариантам осуществления, транспортное средство 200 включает в себя некоторые или все из признаков транспортного средства 100a, раскрытого в публикации Prasad. Согласно различным вариантам осуществления, вычислительной система 100 включает в себя некоторые или все из признаков VCCS 102 с фиг. 2 в публикации Prasad. Согласно различным вариантам осуществления, транспортное средство 200 находится на связи с некоторыми или всеми из устройств, показанных на фиг. 1 в публикации Prasad, в том числе, переносным устройством 110, связной вышкой 116, телекоммуникационной сетью 118, сетью 120 Интернет и центром 122 обработки данных. Согласно различным вариантам осуществления, транспортное средство 200 является транспортным средством 14 в публикации Hu, а вычислительная система 100 включает в себя некоторые или все признаки системы 10 содействия движению задним ходом с прицепом, показанной на фиг. 2 в публикации Hu.
Термин «нагруженное транспортное средство», когда используется в формуле изобретения, настоящим определен, чтобы означать: «транспортное средство, включающее в себя: электродвигатель, множество колес, источник питания и систему рулевого управления; при этом, электродвигатель передает крутящий момент на по меньшей мере одно из множества колес, тем самым, приводя в движение по меньшей мере одно из множества колес; при этом, источник питания подает энергию на электродвигатель; и при этом, система рулевого управления выполнена с возможностью управлять направлением по меньшей мере одного из множества колес». Термин «оборудованное транспортное средство с электрическим приводом», когда используется в формуле изобретения, настоящим определен, чтобы означать: «транспортное средство, включающее в себя: аккумуляторную батарею, множество колес, электродвигатель, систему рулевого управления; при этом, электродвигатель передает крутящий момент на по меньшей мере одно из множества колес, тем самым, приводя в движение по меньшей мере одно из множества колес; при этом, аккумуляторная батарея является перезаряжаемой и выполнена с возможностью подавать электроэнергию на электродвигатель, тем самым, возбуждая электродвигатель; и при этом, система рулевого управления выполнена с возможностью управлять направлением по меньшей мере одного из множества колес».
Далее, со ссылкой на фиг. 3a, в общем, показан и проиллюстрирован избирательный замедлитель 300 поворачивания двери («замедлитель») уровня техники. Замедлитель 300 выполнен с возможностью (a) обеспечивать плавное поворачивание (то есть, открывание) двери, (b) давать двери возможность открываться или поворачиваться в множество заданных положений покоя, (c) предотвращать открывание или поворачивание двери на более чем предопределенный градус (то есть, останавливать дверь в ее максимально открытом положении).
С этой целью, один замедлитель 300 установлен на каждой из множества дверей с 400 по 403. Фиг. 4, в общем, показывает и иллюстрирует замедлитель, являющийся установленным на водительской двери 400. Конфигурация по фиг. 4 является уровнем техники. Каркасный соединитель 307 замедлителя прикреплен к несущей каркасной конструкции транспортного средства 200 (то есть, каркасный соединитель 307 не прикреплен к двери 400). Избирательный затвор 303 замедлителя 300 прикреплен к внутренней поверхности двери 400 и, таким образом, перемещается с дверью 400. Рычаг 302 и упор 301 замедлителя 300 являются плавающими (то есть, не прикреплены непосредственно к двери 400 или каркасу транспортного средства). Рычаг 302 шарнирно вращается (то есть, поворачивается) вокруг рамного соединителя 307 на шарнирной опоре 302d.
Фиг. 3a, в общем, более подробно показывает и иллюстрирует замедлитель 300 уровня техники. Как обсуждено выше, замедлитель 300 включает в себя (a) упор 301, (b) рычаг 302, (c) избирательный затвор 303, (d) каркасный соединитель 307 и (e) крепление 306. Хотя не показано на фиг. 4, крепление 306 крепит избирательный затвор 303 к внутренней поверхности двери 400. На фиг. 4, крепление 306 присоединяло бы избирательный затвор 303 к левой поверхности 400a двери 400.
Со ссылкой на фиг. 3a, и как известно в данной области техники, рычаг 302 поперечно скользит сквозь избирательный затвор 303. Избирательный затвор 303 включает в себя верхнюю пружину 303a, которая поджимает верхний ролик 303b вниз вплотную к рычагу 302, и нижнюю пружину 303c, которая поджимает нижний ролик 303d вверх вплотную к рычагу 302.
Как показано на фиг. 3a, рычаг 302 включает в себя множество впадин (например, первую впадину 302a, вторую впадину 302b и третью впадину 302c). Впадины с 302a по 302c представляют собой промежуточные положения покоя двери 400. Точнее, впадины с 302a по 302c дают пружинам 303a и 303c возможность занимать состояния с низкой энергией. Впадины с 302a по 302c, таким образом, препятствуют дальнейшему поворачиванию двери 400 и способствуют тому, чтобы дверь 400 покоилась в промежуточном расположении, связанном со впадиной. Например, по мере того, как дверь открывается, ролики 303b и 303d могут занимать впадину 302b. Так как впадина 302b является вертикально более тонкой, чем прилегающие участки рычага 302, пружины 303a и 303c будут ослабляться, когда ролики 303b и 303d сидят во впадине 302b. Впадина 302b, таким образом, способствует тому, чтобы дверь останавливалась в промежуточном (то есть, частично открытом и частично закрытом) положении покоя. Если пользователь применяет достаточную дополнительную силу к двери, рычаг 302 будет продолжать скользить внутри избирательного затвора 303, вынуждая пружины 303a и 303c втягиваться и давать роликам 303b и 303d возможность контактировать с новым местом на рычаге 302. Когда каркасный соединитель 307 упирается торцом в избирательный затвор 303, дверь достигает своего полностью закрытого положения, а когда упор 301 упирается торцом в избирательный затвор 303, дверь 400 достигает своего полностью открытого положения.
Фиг. 3b, в общем, показывает и иллюстрирует подробности настоящего изобретения. Фиг. 3b не является уровнем техники. Настоящее изобретение включает в себя прикрепление верхнего и нижнего узлов 304 и 305 линейного исполнительного механизма (также называемых верхним и нижним линейными стопорами или верхним и нижним стопорами) к избирательному затвору 303. Узлы 304 и 305 линейного исполнительного механизма выполнены с возможностью избирательно стискивать или прижимать ролики 303b и 303d вплотную к рычагу 302. Это прижимание предотвращает или препятствует скольжению рычага 302 относительно избирательного затвора 303 и, тем самым, предотвращает или препятствует поворачиванию двери 400 относительно транспортного средства 200. Излагая иначе, узлы 304 и 305 линейного исполнительного механизма выполнены с возможностью останавливать дверь 400 в ее текущем положении и предотвращать поворачивание двери 400 пользователем.
Вариант использования изобретения проиллюстрирован со ссылкой на фиг. 5. На фиг. 5, велосипедист 500 подвергается опасности столкновения с дверью 400 транспортного средства в полностью открытом положении. Настоящее изобретение предсказывает столкновение между велосипедистом 500 и дверью 400, а затем, препятствует открыванию двери 400 с помощью узлов 304 и 305 линейного исполнительного механизма.
Верхний узел 304 линейного исполнительного механизма включает в себя (a) верхний линейный двигатель или соленоид 304a, (b) верхний вертикальный исполнительный механизм 304b и (c) верхнюю тормозную накладку 304c. Нижний узел 305 линейного исполнительного механизма включает в себя (a) нижний линейный двигатель или соленоид 305a, (b) нижний вертикальный исполнительный механизм 305b и (c) нижнюю тормозную накладку 305c.
Линейные двигатели или соленоиды 304a, 305a выполнены с возможностью перемещать или сдвигать вертикальные исполнительные механизмы 304b, 305b в вертикальном направлении. Точнее, когда верхний линейный двигатель или соленоид 304a введет в действие, верхний линейный двигатель или соленоид 304a сдвигает или приводит верхний вертикальный исполнительный механизм 304b вниз и удерживает верхний вертикальный исполнительный механизм 304b в полностью выдвинутом вниз положении. Когда нижний линейный двигатель или соленоид 305a введет в действие, нижний линейный двигатель или соленоид 305a сдвигает или приводит нижний вертикальный исполнительный механизм 305b вверх и удерживает нижний вертикальный исполнительный механизм 305b в полностью выдвинутом вверх положении. Когда линейные двигатели и соленоиды 304a, 305a выведены из работы, линейные двигатели или соленоиды: (a) втягивать вертикальные исполнительные механизмы 304b, 305b и/или (b) больше не загонять вертикальные исполнительные механизмы 304b, 305b в их полностью выдвинутые положения (то есть, давать вертикальным исполнительным механизмам 304b, 305b возможность по меньшей мере частично втягиваться под действием силы тяжести и/или под противодействующей силой роликов 303b, 303d.
Тормоза 304c, 305c выполнены с возможностью прижиматься вплотную к роликам 303b, 303d и, таким образом, предотвращать или препятствовать перемещению верхнего ролика 303b вверх под силой рычага 302 и перемещению нижнего ролика 303d вниз под силой рычага 302. Тормоза 304c, 305c могут быть сделаны из резины и прикреплены к наконечникам исполнительных механизмов 304b, 305b.
Согласно некоторым вариантам осуществления, вертикальные исполнительные механизмы 304b, 305b и тормоза 304c, 305c размещены в центральных полостях верхней и нижней пружин 303a, 303c. Верхняя пружина 303a, таким образом, обертывает верхний исполнительный механизм 304b и верхний тормоз 304c, когда верхний вертикальный исполнительный механизм 304b находится в полностью выдвинутом положении. Подобным образом, нижняя пружина 303c обертывает нижний вертикальный исполнительный механизм 305b и нижний тормоз 305c, когда нижний тормоз 305b находится в полностью выдвинутом положении.
Возвращаясь к фиг. 3a, верхний и нижний узлы 304, 305 линейного исполнительного механизма, когда являются действующими, выполнены с возможностью избирательно останавливать горизонтальное поступательное движение рычага 302 через избирательный затвор 303. Когда узлы 304, 305 верхнего и нижнего линейного исполнительного механизма являются не введены в действие, замедлитель 300 функционирует обычно, и как описано ранее.
Фиг. 6, в общем, показывает и иллюстрирует способ 600 управления узлами 304 и 305 исполнительного механизма. Способ 600 выполнен с возможностью (a) предсказывать событие открывания двери, (b) предсказывать ожидаемое столкновение с дверью, и (c) вводить в действие узлы 304, 305 исполнительного механизма на основании (a) и (b).
В блоке 602 транспортное средство 200 выявляет событие остановки. Транспортное средство 200 может выявлять такое событие, (a) определяя, что транспортное средство 200 было поставлено на стоянку, и/или (b) определяя, что транспортное средство 200 достигло нулевой скорости.
В блоке 604 транспортное средство 200 предсказывает открывание одной или более дверей с 400 по 403. Двери, предсказанные имеющими правдоподобную вероятность открывания, названы действующими дверями.
Транспортное средство 200 предсказывает открывание водительской двери 400 на основании одного или более из следующих событий: (a) постановки транспортного средства на стоянку, (b) перехода водительского ремня безопасности из зацепленного в расцепленное состояние в течение заданного периода времени перед постановкой транспортного средства на стоянку, (c) показания датчиком веса в водительском сиденье уменьшенной величины веса по сравнению с установившимся весом, определенным, когда транспортное средство 200 было в движении.
Транспортное средство 200 предсказывает открывание одной из передней пассажирской двери 403 на основании одного или более из следующих событий: (a) достижения транспортным средством 200 нулевой скорости, (b) перехода ремня безопасности переднего пассажира из зацепленного в расцепленное состояние в течение заданного периода времени перед достижением транспортным средством нулевой скорости, (c) показания датчиком веса в переднем пассажирском сиденье уменьшенной величины веса по сравнению с установившимся весом, определенным, когда транспортное средство 200 было в движении.
Транспортное средство 200 предсказывает открывание задней левой пассажирской двери 401 на основании одного или более из следующих событий: (a) достижения транспортным средством 200 нулевой скорости, (b) перехода любого из ремней безопасности заднего сиденья из зацепленного в расцепленное состояние в течение заданного периода времени перед достижением транспортным средством нулевой скорости, (c) показания датчиком веса в любом из задних сидений уменьшенной величины веса по сравнению с установившимся весом, определенным, когда транспортное средство 200 было в движении.
Транспортное средство 200 предсказывает открывание задней правой пассажирской двери 402 на основании одного или более из следующих событий: (a) достижения транспортным средством 200 нулевой скорости, (b) перехода любого из ремней безопасности заднего сиденья из зацепленного в расцепленное состояние в течение заданного периода времени перед достижением транспортным средством нулевой скорости, (c) показания датчиком веса в любом из задних сидений уменьшенной величины веса по сравнению с установившимся весом, определенным, когда транспортное средство 200 было в движении.
В блоке 606 транспортное средство 200 сканирует или контролирует окружающую среду с помощью локальных датчиков со 102a по 102d транспортного средства. В блоке 608 транспортное средство 200 применяет показания с локальных датчиков со 102a по 102d транспортного средства для выявления объектов, окружающих транспортное средство. В блоке 610 транспортное средство 200 рассчитывает размеры, траектории, положения, скорости и/или ускорения выявленных объектов. В блоке 612 транспортное средство 200 отфильтровывает объекты на основании одного или более из расчетных размеров, траекторий относительно положений распахивания действующей дверей (то есть, дверей, которые имеют правдоподобную вероятность открывания), положений, скоростей и/или ускорений. Точнее, транспортное средство 200 может: игнорировать объекты с размерами, попадающими ниже заданного размерного порогового значения (например, имеющие малую площадь поверхности); игнорировать объекты, имеющие траекторию, не пересекающую положения распахивания действующих дверей; игнорировать объекты, которые находятся на по меньшей мере предопределенном расстоянии от каждого из положений распахивания действующих дверей; игнорировать объекты, имеющие скорости, попадающие ниже заданного порогового значения скорости; игнорировать объекты, имеющие ускорения, попадающие ниже заданного порогового значения ускорения, заданное пороговое значение ускорения является функцией (a) текущего расстояния объекта от положений распахивания действующей двери, которая пересекает траекторию объекта, и (b) текущей скорости объекта.
Следует принимать во внимание, что положения распахивания дверей являются дуговидным полным диапазоном возможных положений дверей. Например, положение распахивания водительской двери 400 включает в себя (a) положение двери 400, когда полностью закрыта, (b) положение двери 400, когда полностью открыта, и (c) все промежуточные положения двери. Таким образом, следует принимать во внимание, что положение распахивания водительской двери 400 является дуговидным, причем, один конец дуги соответствует полному закрыванию двери, а противоположный конец дуги соответствует полному открыванию двери. Дополнительно следует принимать во внимание, что транспортное средство 200 может рассчитывать пересечения между объектами и дверями при условии, что компоненты вне двери дополняют преграды (например, если велосипед находится по правую сторону от транспортного средства 200, и траектория велосипеда пересекает дверь 400 по левую сторону от транспортного средства 200, то транспортное средство 200 будет игнорировать пересечение между дверью 400 и велосипедом).
В блоке 614 транспортное средство 200 рассчитывает время до столкновения (TTC) между неотфильтрованными объектами и положениями распахивания действующих дверей, которые пересекают траектории неотфильтрованных объектов (например, если траектория велосипеда пересекает дверь 401, и дверь 401 является действующей, то транспортное средство 200 находит TTC между положением распахивания двери 401 и велосипедом; если траектория велосипеда пересекает двери 400 и 401, и двери 400 и 401 являются действующими, то транспортное средство 200 находит TTC между каждым из положений распахивания дверей 400 и 401 и велосипедом. TTC основано на (a) скорости объекта, (b) положении объекта относительно положения распахивания двери, (c) ускорении объекта, и/или (d) направлении движения объекта относительно положения распахивания двери. Расчет TTC описан в патентной заявке США под № 15/183,355, Bidner, которая настоящим во всей своей полноте содержится в настоящей заявке посредством ссылки.
Если TTC находится выше заданного порогового значения, то транспортное средство 200 возвращается в блок 606, побуждая способ 600 циклически выполняться или повторяться. Транспортное средство 200 может циклически выполнять способ 600 в течение заданного времени циклического выполнения. Транспортное средство 200 может циклически выполнять способ 600 до тех пор, пока (a) не была открыта по меньшей мере одна дверь, (b) ни один из датчиков веса в сиденье не измерил вес, совместимый с пассажиром-человеком в течение по меньшей мере заданного времени, и/или (c) значения, возвращенные датчиками веса в сиденье не оставались постоянными (в пределах заданного уровня, например, ±5%) в течение по меньшей мере заданного времени.
Если TTC попадает ниже заданного порогового значения времени, то транспортное средство 200 переходит в блок 616 и предпринимает одно или более действий. Действия могут включать в себя (a) ввод в действие узлов 304, 305 линейного исполнительного механизма замедлителей, соответствующих активным дверям, связанным с TTC ниже заданного порогового значения времени; (b) мигание фонарем, гудение сиреной или проигрывание звукового сообщения для остановки (отпугивания) внешнего объекта; (c) отображение или озвучивание внутреннего предупреждения в транспортном средстве. После этого, транспортное средство 200 возвращается в блок 606 и повторяет цикл.
Во время повторения цикла, транспортное средство 200 может продолжать применять вышеприведенные действия до возврата на следующую итерацию блока 616. Если следующая итерация блока 616 не включает в себя те же самые действия, то транспортное средство 200 завершает активные на данный момент действия, которые отсутствуют в новой итерации блока 616.
Согласно некоторым вариантам осуществления, транспортное средство 200 может автоматически выводить из работы узлы 304, 305 линейного исполнительного механизма по (a) команде пользователя через пользовательский интерфейс 105, (b) выявлению повторных попыток (например, по меньшей мере двух попыток или по меньшей мере трех попыток) открыть дверь, соответствующую упомянутым узлам 304, 305 линейного исполнительного механизма. Транспортное средство 200 может определять условие (b), регистрируя, посредством пригодных датчиков, величину силы, приложенной к одному или обоим вертикальным исполнительным механизмам 304b, 305b. Если сила превышает предопределенную силу по меньшей мере заданное количество раз (например, один раз или три раза), то транспортное средство 200 может автоматически выводить из работы упомянутые узлы 304, 305 линейного исполнительного механизма.
Согласно некоторым вариантам осуществления, транспортное средство может определять условие (b), распознавая или регистрируя угловое положение дверной ручки. Если транспортное средство выявляет, что дверная ручка повернулась из своего положения покоя (то есть, находящегося заподлицо или параллельного с дверью транспортного средства) заданное количество раз, то транспортное средство может автоматически выводить из работы упомянутые узлы 304, 305 линейного исполнительного механизма.
Реферат
Группа изобретений относится к области транспортного машиностроения. По первому варианту, транспортное средство содержит каркас, дверь, рычаг, верхний и нижний стопоры, датчики и процессор. Рычаг включает в себя множество впадин и выполнен с возможностью скольжения через верхний и нижний ролики, смещенные относительно рычага, когда дверь поворачивается. Верхний и нижний стопоры выполнены с возможностью прижимать верхний и нижний ролики к рычагу, останавливая поворачивание двери. По второму варианут, транспортное средство содержит замедлитель. Способ остановки поворотной двери транспортного средства включает этапы, на которых посредством процессора транспортного средства распознают, используя датчики, распознанные события, и вводят в действие и выводят из работы стопоры на основании распознанных событий. Достигается предотвращение столкновения препятствий с дверью транспортного средства при ее открытии. 3 н. и 17 з.п. ф-лы, 7 ил.
Формула
Документы, цитированные в отчёте о поиске
Автомобиль и дверной замок для двери автомобиля
Комментарии