Способ и устройство управления движением транспортного средства с содействием вождению - RU2735746C1
Код документа: RU2735746C1
Чертежи
Описание
Область техники
[0001] Настоящее раскрытие относится к способу и устройству для управления движением транспортного средства с содействием вождению, в котором ускорение рассматриваемого транспортного средства на искривленном маршруте подавляется при движении по полосе движения рассматриваемого транспортного средства.
Уровень техники
[0002] В прошлом были известны устройства содействия вождению (содействия вождению, drive-assistance) и способы содействия вождению, в которых предусмотрен блок определения кривой, который: определяет, имеется ли искривленный участок движения, в котором транспортное средство движется по кривой; и запрещает ускорение вследствие автономного управления движением на искривленном участке движения (например, см. патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Выложенная заявка на патент Японии № 2017-47710
Раскрытие сущности изобретения
Проблемы, решаемые изобретением
[0004] Однако, в устройствах предшествующего уровня техники ускорение на кривых постоянно запрещено, даже когда возможно движение по желаемой траектории на кривой вследствие управления системой управления рулевого управления. Поэтому водитель может в некоторых случаях чувствовать неудовлетворенность отсутствием ускорения. Кроме того, водитель может испытывать больше опасений при отклонении от желаемой траектории, когда другое транспортное средство присутствует на внешней стороне искривленного маршрута, в большей степени, чем когда другое транспортное средство отсутствует.
[0005] Настоящее раскрытие сосредоточено на вышеупомянутых проблемах, поскольку задачей настоящего раскрытия является уменьшение опасения со стороны водителя, в то же время допуская большее количество ситуаций, в которых возможно ускорение на искривленном маршруте.
Средства, используемые для решения упомянутых выше проблем
[0006] Для решения вышеуказанной задачи настоящее раскрытие представляет собой способ управления движением транспортного средства с содействием вождению, причем способ включает в себя: установление во время движения по искривленному маршруту порогового значения поведения при повороте, установленного в качестве граничного значения для подавления ускорения рассматриваемого транспортного средства, причем упомянутое пороговое значение устанавливается таким образом, чтобы оно было ниже, когда другое транспортное средство присутствует на искривленном маршруте с внешней периферийной стороны, смежном с полосой движения рассматриваемого транспортного средства, чем когда другое транспортное средство отсутствует на искривленном маршруте с внешней периферийной стороны; получение значения показателя поведения при повороте, которое является значением для оценки состояния поведения при повороте рассматриваемого транспортного средства, во время движения по искривленному маршруту и определения, больше ли значение показателя поведения при повороте, чем пороговое значение поведения при повороте; и разрешают движение с ускорением по искривленному маршруту, когда было определено, что значение показателя поведения при повороте меньше или равно пороговому значению поведения при повороте, но подавляют движение с ускорением по искривленному маршруту, когда определено, что значение показателя поведения при повороте больше, чем пороговое значение поведения при повороте.
Эффект изобретения
[0007] Таким образом, установление порогового значения поведения при повороте, установленного в качестве граничного значения для подавления ускорения рассматриваемого транспортного средства, в частности, так, чтобы пороговое значение было ниже, когда другое транспортное средство присутствует на искривленном маршруте с внешней периферийной стороны, чем когда другое транспортное средство отсутствует, дает возможность уменьшить опасения со стороны водителя, допуская при этом большее количество ситуаций, когда возможно ускорение на искривленном маршруте.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг.1 - общая схема конфигурации, показывающая систему содействия вождению, установленную в транспортном средстве с содействием вождению, к которому применяются способ управления движением и устройство управления движением согласно первому варианту осуществления;
Фиг.2 - блок-схема управления, показывающая подробную конфигурацию процессора оценки распознавания для автономного вождения, который предоставляется системе содействия вождению на фиг.1;
Фиг.3 - блок-схема, показывающая последовательность операций процесса управления движением по искривленному маршруту, выполняемого контроллером движения по искривленному маршруту, предоставляемого процессору оценки распознавания для автономного вождения на фиг.2;
Фиг.4 - схема работы, показывающая обзор случая, когда рассматриваемое транспортное средство поворачивает по искривленному маршруту в ситуации, когда нет транспортного средства, движущегося по искривленному маршруту с внешней периферийной стороны;
Фиг.5 - схема работы, показывающая изменение положения рассматриваемого транспортного средства с течением времени в случае, когда рассматриваемое транспортное средство поворачивает по искривленному маршруту в ситуации, когда нет транспортного средства, движущегося по искривленному маршруту с внешней периферийной стороны;
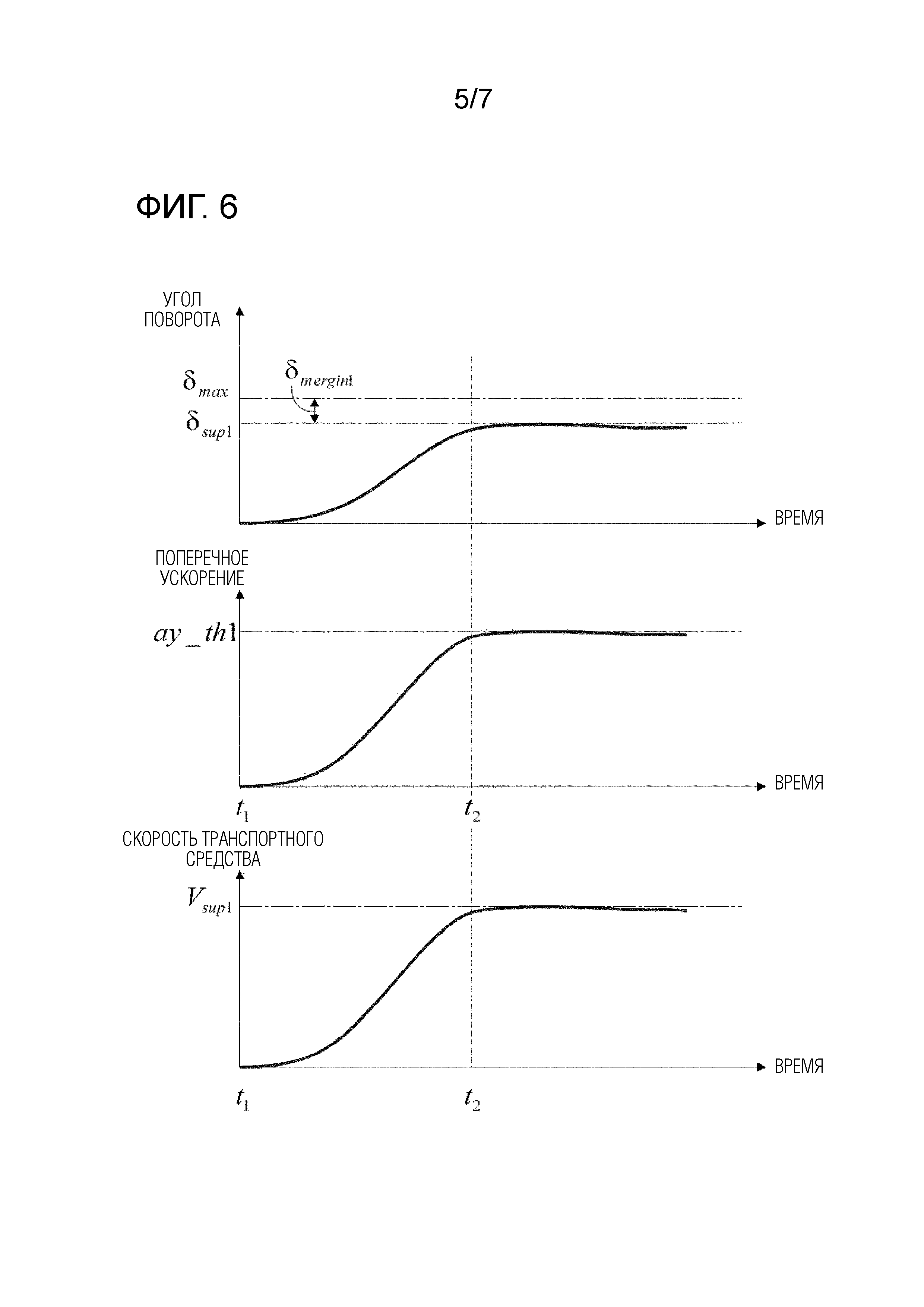
Фиг.6 - временная диаграмма, показывающая профиль угла поворота, профиль поперечного ускорения и профиль скорости транспортного средства, в котором целевой угол поворота, целевое поперечное ускорение и целевая скорость транспортного средства для рассматриваемого транспортного средства представлены относительно времени в случае, в котором рассматриваемое транспортное средство поворачивает по искривленному маршруту в ситуации, когда нет транспортного средства, движущегося по искривленному маршруту с внешней периферийной стороны;
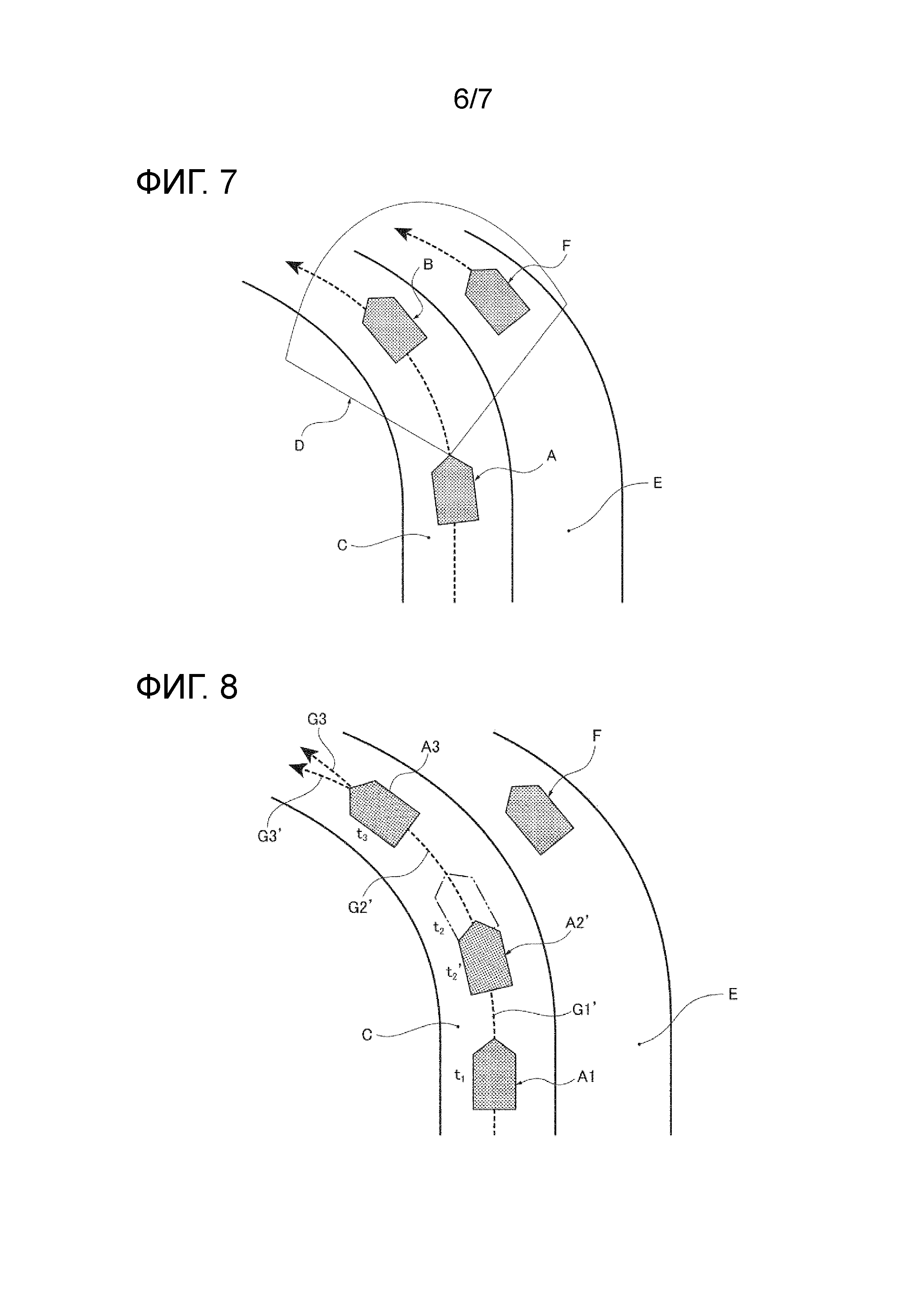
Фиг.7 - схема работы, показывающая обзор случая, когда рассматриваемое транспортное средство поворачивает по искривленному маршруту в ситуации, когда присутствует транспортное средство, движущееся по искривленному маршруту с внешней периферийной стороны;
Фиг.8 - схема работы, показывающая изменение положения рассматриваемого транспортного средства с течением времени в случае, когда рассматриваемое транспортное средство поворачивает по искривленному маршруту в ситуации, когда присутствует транспортное средство, движущееся по искривленному маршруту с внешней периферийной стороны; и
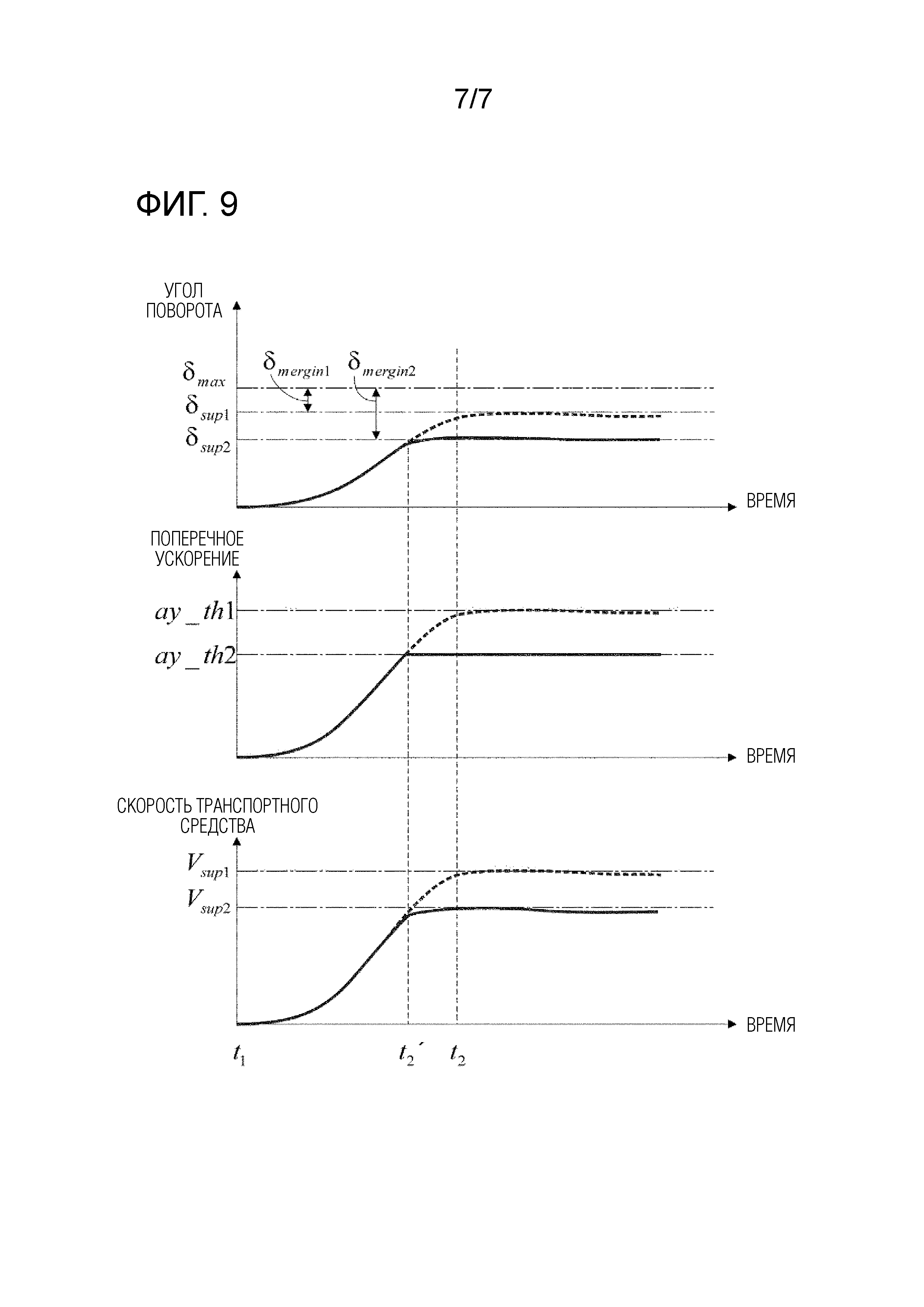
Фиг.9 - временная диаграмма, показывающая профиль угла поворота, профиль поперечного ускорения и профиль скорости транспортного средства, в котором целевой угол поворота, целевое поперечное ускорение и целевая скорость транспортного средства для рассматриваемого транспортного средства представлены относительно времени в случае, когда рассматриваемое транспортное средство поворачивает по искривленному маршруту в ситуации, когда присутствует транспортное средство, движущееся по искривленному маршруту с внешней периферийной стороны.
Предпочтительные варианты осуществления изобретения
[0009] Предпочтительный вариант осуществления способа и устройства для управления движением транспортного средства с содействием вождению по настоящему изобретению описан ниже на основе первого варианта осуществления, показанного на чертежах.
Первый вариант осуществления
[0010] Сначала будет описана конфигурация. Способ управления движением и устройство управления движением в первом варианте осуществления применяются к транспортному средству с содействием вождению, которое имеет в качестве основы транспортное средство с электроприводом, включающее в себя приведение в движение посредством электромотора, причем транспортное средство с содействием вождению демонстрирует, когда выбран автономный режим вождения, функцию автономного вождения, полученную из управления рулевым управлением/ приведением в движение/торможением по полосе движения, по которой движется рассматриваемое транспортное средство. Конфигурация первого варианта осуществления описана ниже под заголовками: «Общая конфигурация системы содействия вождению», «Подробная конфигурация процессора оценки распознавания для автономного вождения» и «Конфигурация процесса управления движением по искривленному маршруту».
[0011] [Общая конфигурация системы содействия вождению]
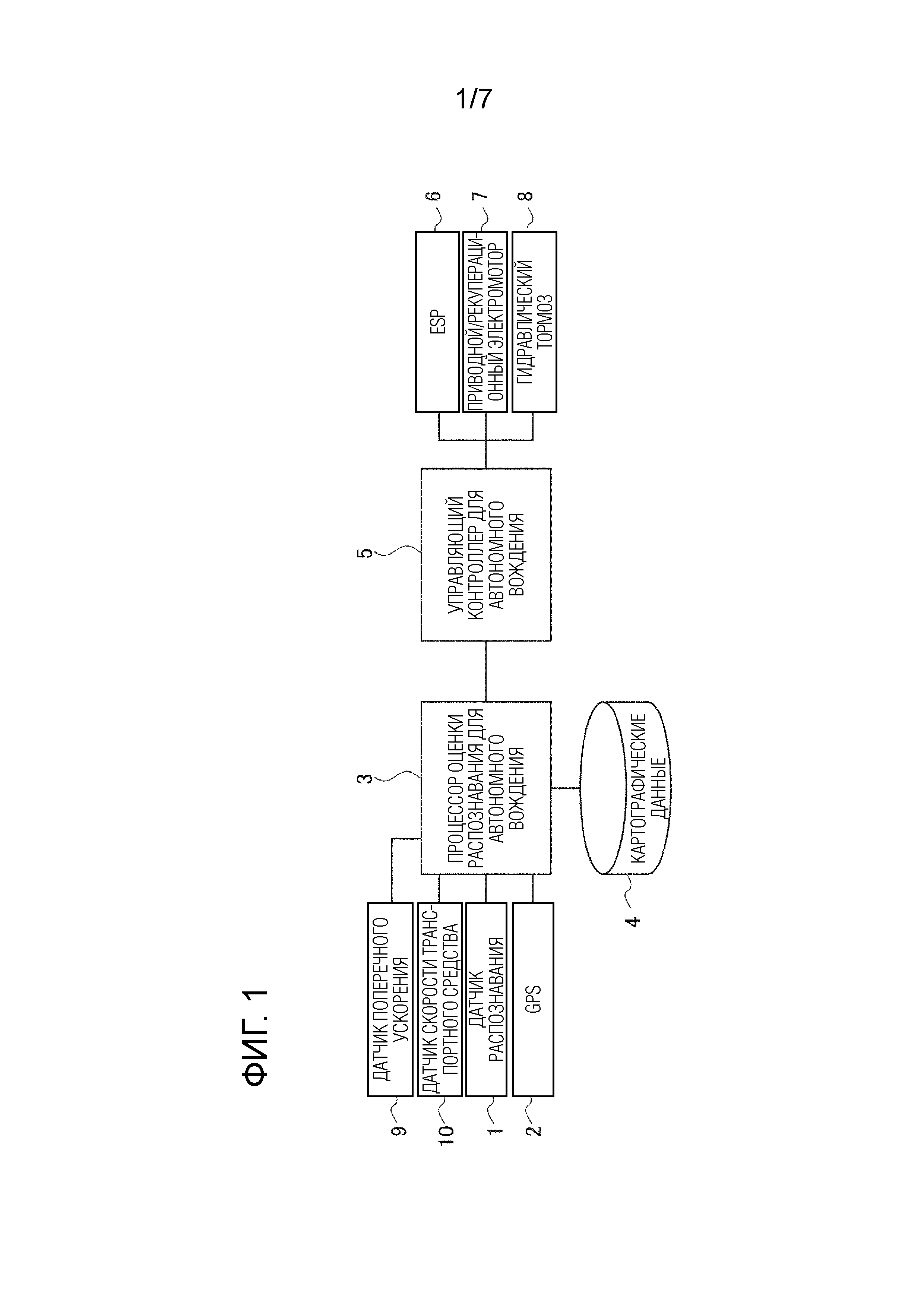
На фиг.1 показана система содействия вождению, установленная в транспортном средстве с содействием вождению, к которому применяются способ управления движением и устройство управления движением согласно первому варианту осуществления. Общая конфигурация системы содействия вождению описана ниже на основе Фиг. 1.
[0012] Система содействия вождению снабжена датчиком 1 распознавания, GPS 2, процессором 3 оценки распознавания для автономного вождения, картографическими данными 4, управляющим контроллером 5 для автономного вождения, усилителем 6 рулевого управления с электроприводом, приводной/рекуперационный электромотор 7, гидравлический тормоз 8, датчик 9 поперечного ускорения и датчик 10 скорости транспортного средства, как показано на фиг.1. В частности, процессор 3 оценки распознавания для автономного вождения и управляющий контроллер 5 для автономного вождения, который вычисляет значения управляющих команд и передает значения управляющих команд в ECU (ЭБУ) исполнительных механизмов (актуаторов), установлены в рассматриваемом транспортном средстве в качестве систем обработки электронного управления, реализованных с использованием микрокомпьютера. Описание ECU исполнительного механизма опущено.
[0013] Датчик 1 распознавания является бортовым датчиком, предусмотренным для распознавания внешней среды в окрестности рассматриваемого транспортного средства по направлению к передней, задней и левой и правой сторонам рассматриваемого транспортного средства. Типичные примеры включают в себя бортовые камеры распознавания окрестности и лазерный радар.
[0014] GPS 2 является средством определения положения, которое установлено в рассматриваемом транспортном средстве и обнаруживает положение движения (широту и долготу) рассматриваемого транспортного средства во время движения. Термин «GPS» является аббревиатурой от «глобальной системы позиционирования».
[0015] Процессор 3 оценки распознавания для автономного вождения объединяет информацию из картографических данных 4, GPS 2 и датчика 1 распознавания и вычисляет различные профили, такие как профиль угла поворота, профиль поперечного ускорения и профиль скорости транспортного средства. В частности, когда пассажир назначает пункт назначения, целевой маршрут движения до назначенного пункта назначения вычисляется на основе информации о положении, полученной из GPS 2, и картографических данных 4, хранящихся в бортовой памяти. Во время движения по целевому маршруту движения в полосе движения рассматриваемого транспортного средства на основе информации о положении, полученной из GPS 2, различные профили, такие как профиль угла поворота, профиль поперечного ускорения и профиль скорости транспортного средства, вычисляются в соответствии с предписанным правилом управления автономного вождения. Когда другое транспортное средство присутствует в полосе движения рассматриваемого транспортного средства или в смежной с ним полосе движения или когда полоса движения рассматриваемого транспортного средства представляет собой искривленный маршрут, различные профили последовательно пересматриваются на основе, в числе прочего, результатов считывания окрестности транспортного средства, полученных бортовым датчиком 1 распознавания.
[0016] Картографические данные 4 хранятся в бортовой памяти и содержат записанную в ней информацию о дороге, такую как кривизна кривой, наклон поверхности маршрута и ограничение скорости. Картографические данные 4 таковы, что, когда GPS 2 обнаруживает положение движения рассматриваемого транспортного средства во время движения, информация карты, центрированная относительно положения движения рассматриваемого транспортного средства, считывается из процессора 3 оценки распознавания для автономного вождения.
[0017] Управляющий контроллер 5 для автономного вождения определяет значения команд, относящиеся к величине рулевого управления, величине приведения в движение и величине торможения, на основе различных профилей из процессора 3 оценки распознавания для автономного вождения. Управление рулевым управлением выполнено с возможностью выполнения с помощью усилителя 6 рулевого управления с электроприводом, который является исполнительным механизмом рулевого управления. Управление приведением в движение выполнено с возможностью выполнения приводным/рекуперационным электромотором 7, который является исполнительным механизмом источника приведения в движение. Управление торможением выполнено с возможностью выполнения распределенным образом, частично посредством рекуперации приводным/рекуперационным электромотором 7 и частично посредством механического торможения гидравлическим тормозом 8. Управление рулевым управлением, управление приведением в движение и управление торможением выполняются с помощью ECU, предоставленных каждому из исполнительных механизмов.
[0018] Усилитель 6 рулевого управления с электроприводом представляет собой исполнительный механизм рулевого управления, который осуществляет автономное рулевое управление в соответствии со значением управляющей команды от управляющего контроллера 5 для автономного вождения. Во время автономного рулевого управления водитель также может взять рулевое колесо и взять управление на себя, используя ручное рулевое управление.
[0019] Приводной/рекуперационный электромотор 7 является исполнительным механизмом источника приведения в движение, который выполняет движение на фиксированной скорости или движение с ускорением, полученное в результате приведения в движение, или движение с замедлением, полученное в результате рекуперации, в соответствии со значением управляющей команды от управляющего контроллера 5 для автономного вождения.
[0020] Гидравлический тормоз 8 представляет собой исполнительный механизм тормоза, который осуществляет гидравлическое торможение в соответствии со значением управляющей команды от управляющего контроллера 5 для автономного движения.
[0021] Датчик 9 поперечного ускорения установлен в рассматриваемом транспортном средстве, обнаруживает поперечное ускорение, генерируемое в рассматриваемом транспортном средстве, и вводит обнаруженное поперечное ускорение в процессор 3 оценки распознавания для автономного вождения. Датчик 10 скорости транспортного средства установлен в рассматриваемом транспортном средстве, обнаруживает скорость транспортного средства для рассматриваемого транспортного средства и вводит обнаруженную скорость транспортного средства в процессор 3 оценки распознавания для автономного вождения.
[0022] [Подробная конфигурация процессора оценки распознавания для автономного вождения]
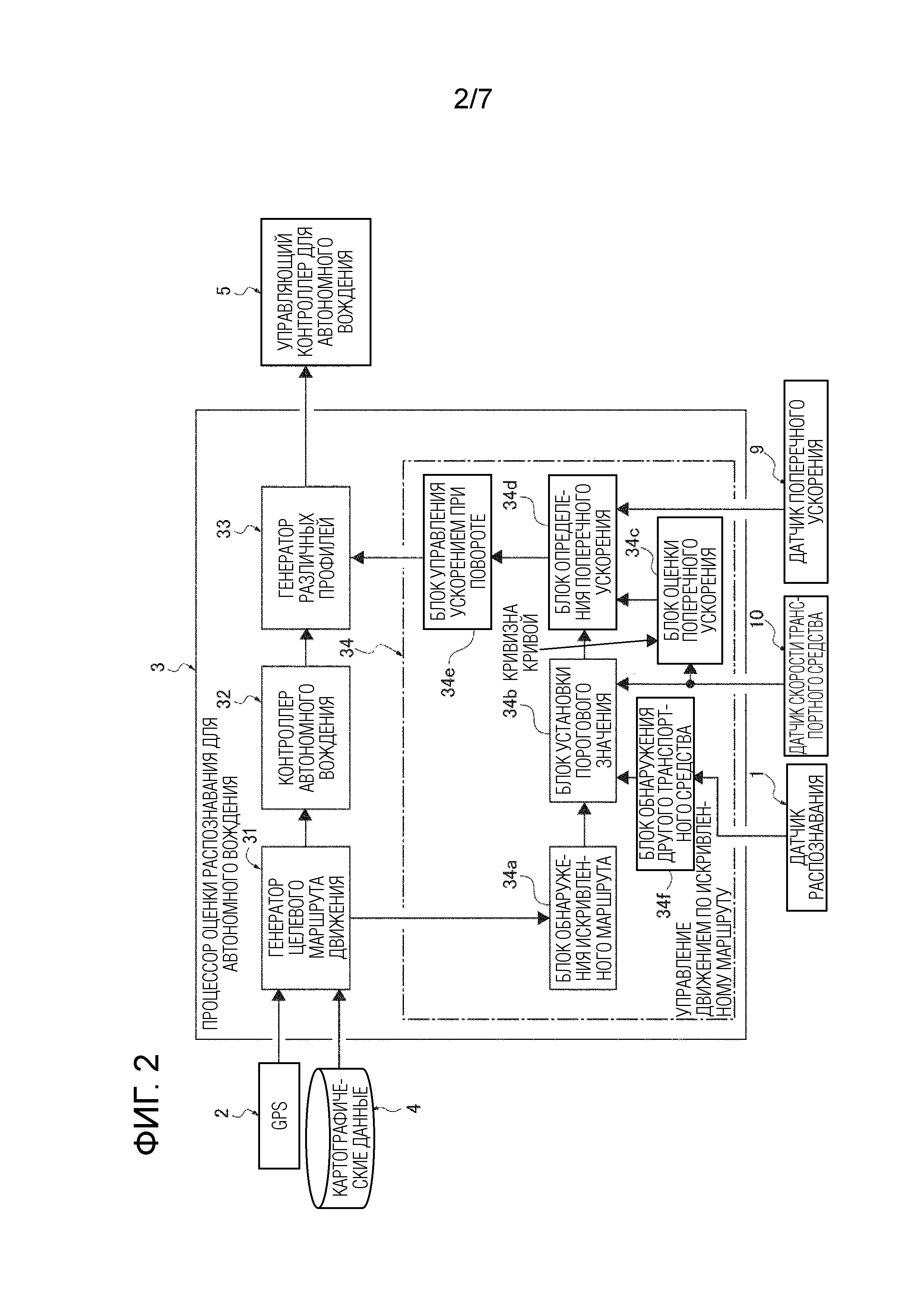
На фиг.2 показана блок-схема управления процессора 3 оценки распознавания для автономного вождения, который предоставляется системе содействия вождению на фиг.1. Подробная конфигурация процессора 3 оценки распознавания для автономного вождения описана ниже на основе фиг.2.
[0023] Процессор 3 оценки распознавания для автономного вождения снабжен генератором 31 целевого маршрута движения, контроллером 32 автономного вождения, генератором 33 различных профилей и контроллером 34 движения по искривленному маршруту, как показано на фиг.2.
[0024] Когда водитель выполняет манипулирование для выбора автономного вождения, информация о положении, полученная из GPS 2, и картографические данные 4, сохраненные в бортовой памяти, вводятся в генератор 31 целевого маршрута движения. Когда пассажир назначает пункт назначения, генератор 31 целевого маршрута движения генерирует целевой маршрут движения из текущего положения рассматриваемого транспортного средства в пункт назначения в соответствии с расчетом кратчайшего расстояния, расчетом стоимости и т.д. На основе информация о положении рассматриваемого транспортного средства, информация о дороге и т.д. Целевой маршрут движения устанавливается в положении в центре по ширине полосы движения транспортного средства.
[0025] Информация о целевом маршруте движения вводится из генератора 31 целевого маршрута движения в контроллер 32 автономного вождения. Контроллер 32 автономного вождения вычисляет целевой угол поворота, целевое поперечное ускорение, целевую скорость транспортного средства и т.д., когда рассматриваемое транспортное средство движется посредством автономного вождения, в соответствии с правилом управления автономным вождением.
[0026] Термин «правило управления автономным вождением» относится к правилу управления, в котором система управления интервалом для движения при сохранении расстояния интервала от ведущего транспортного средства в пределах диапазона скорости транспортного средства, установленного водителем, и система управления следованием по полосе движения, которая помогает рулевому управлению поддерживать положение в полосе движения рассматриваемого транспортного средства, используются в комбинации. В системе управления интервалом установленная скорость транспортного средства, установленная водителем, сохраняется, когда ведущее транспортное средство не обнаружено. Тем не менее, когда обнаруживается ведущее транспортное средство, управление выполняется таким образом, чтобы установленная скорость транспортного средства использовалась в качестве верхнего ограничения, и интервал от ведущего транспортного средства сохранялся, причем интервал соответствует скорости транспортного средства. Когда ведущее транспортное средство отклоняется от полосы движения рассматриваемого транспортного средства из-за смены полосы движения, рассматриваемое транспортное средство ускоряется и возвращается к установленной скорости транспортного средства.
[0027] Целевой угол поворота, целевое поперечное ускорение, целевая скорость транспортного средства и т.д. вводятся из контроллера 32 автономного вождения в генератор 33 различных профилей. Генератор 33 различных профилей генерирует профиль угла поворота, профиль поперечного ускорения и профиль скорости транспортного средства, в котором целевой угол поворота, целевое поперечное ускорение и целевая скорость транспортного средства представлены в соответствии с характеристиками вдоль целевого маршрута движения. Когда полоса движения рассматриваемого транспортного средства представляет собой искривленный маршрут, различные профили пересматриваются в зависимости от того, введен ли «установить флаг запрета ускорения на 1» или «установить флаг запрета ускорения на 0» из блока 34е управления ускорением при повороте. Различные профили, генерируемые генератором 33 различных профилей, выводятся на управляющий контроллер 5 для автономного управления.
[0028] Контроллер 34 движения по искривленному маршруту имеет блок 34a обнаружения искривленного маршрута, блок 34b установления порогового значения (блок установления порогового значения поведения при повороте), блок 34c оценки поперечного ускорения, блок 34d определения поперечного ускорения (блок определения значения показателя поведения при повороте), блок 34e управления ускорением при повороте и блок 34f обнаружения другого транспортного средства.
[0029] Целевой маршрут движения, генерируемый генератором 31 целевого маршрута движения, вводится в блок 34а обнаружения искривленного маршрута. Во время движения вдоль полосы движения рассматриваемого транспортного средства блок 34а обнаружения искривленного маршрута обнаруживает искривленный маршрут, присутствующий в целевом маршруте движения, который является запланированным маршрутом движения рассматриваемого транспортного средства. Когда искривленный маршрут обнаружен, блок 34а обнаружения искривленного маршрута получает информацию о кривизне кривой об искривленном маршруте, причем информация обнаруживается в то же время, что и искривленный маршрут.
[0030] Информация о присутствии другого транспортного средства из блока 34f обнаружения другого транспортного средства и информация о скорости транспортного средства от датчика 10 скорости транспортного средства вводятся в блок 34b установления порогового значения. Блок 34b установления порогового значения устанавливает пороговое значение поперечного ускорения для запрещенного ускорения, которое устанавливается в качестве граничного значения для запрета ускорения рассматриваемого транспортного средства на искривленном маршруте, чтобы быть ниже, когда другое транспортное средство присутствует на искривленном маршруте с внешней периферийной стороны, чем когда другое транспортное средство отсутствует на искривленном маршруте с внешней периферийной стороны. Блок 34b установления порогового значения не просто устанавливает пороговое значение поперечного ускорения для запрещенного ускорения, чтобы оно было низким при любых обстоятельствах, когда на искривленном маршруте с внешней периферийной стороны присутствует другое транспортное средство, а скорее устанавливает пороговое значение поперечного ускорения для запрещенного ускорения, чтобы оно было низким, когда другое транспортное средство присутствует на искривленном маршруте с внешней периферийной стороны, и другое транспортное средство приближается к рассматриваемому транспортному средству. В частности, даже если на искривленном маршруте с внешней периферийной стороны присутствует другое транспортное средство, пороговое значение поперечного ускорения для запрещенного ускорения устанавливается на нормальное значение, когда другое транспортное средство не приближается к рассматриваемому транспортному средству. Блок 34f обнаружения другого транспортного средства обнаруживает, присутствует ли другое транспортное средство в окрестности рассматриваемого транспортного средства, на основе информации распознавания, относящейся к окрестности рассматриваемого транспортного средства, от датчика 1 распознавания.
[0031] Информация о кривизне кривой от блока 34а обнаружения искривленного маршрута и информация о скорости транспортного средства от датчика 10 скорости транспортного средства вводятся в блок 34с оценки поперечного ускорения. Блок 34c оценки поперечного ускорения вычисляет, используя кривизну кривой и скорость транспортного средства, оцененное поперечное ускорение, оцененное для генерации в рассматриваемом транспортном средстве.
[0032] Пороговое значение поперечного ускорения для запрещенного ускорения из блока 34b установления порогового значения, информация об оцененном поперечном ускорении из блока 34c оценки поперечного ускорения и информация о поперечном ускорении, сформированная в рассматриваемом транспортном средстве как полученная из датчика 9 поперечного ускорения, вводится в блок 34d определения поперечного ускорения. Блок 34d определения поперечного ускорения выдает определение, что ускорение разрешено во время движения по искривленному маршруту, в то время как оцененное поперечное ускорение равно или меньше, чем пороговое значение поперечного ускорения для запрещенного ускорения, или в то время, когда поперечное ускорение, генерируемое в рассматриваемом транспортном средстве, равно или меньше порогового значения поперечного ускорения для запрещенного ускорения. Однако блок 34d определения поперечного ускорения выдает определение, что ускорение запрещено во время движения по искривленному маршруту, когда оцененное поперечное ускорение больше, чем пороговое значение поперечного ускорения для запрещенного ускорения, и поперечное ускорение, генерируемое в рассматриваемом транспортном средстве, больше чем пороговое значение поперечного ускорения для запрещенного ускорения. Информация об оцененном поперечном ускорении от блока 34с оценки поперечного ускорения и информация о поперечном ускорении от датчика 9 поперечного ускорения соответствуют значениям показателя поведения при повороте, которые являются значениями для оценки состояния поведения при повороте рассматриваемого транспортного средства во время движения по искривленному маршруту.
[0033] Результат определения от блока 34d определения поперечного ускорения вводится в блок 34e управления ускорением при повороте. Когда определение того, что ускорение разрешено, вводится из блока 34d определения поперечного ускорения, блок 34e управления ускорением при повороте выводит «установить флаг запрета ускорения на 0», который разрешает движение с ускорением по искривленному маршруту, в генератор 33 различных профилей. Однако, когда определение, что ускорение запрещено, вводится из блока 34d определения поперечного ускорения, блок 34e управления ускорением при повороте выводит «установить флаг запрета ускорения на 1», который запрещает движение с ускорением по искривленному маршруту, в генератор 33 различных профилей.
[0034] [Конфигурация процесса управления движением по искривленному маршруту]
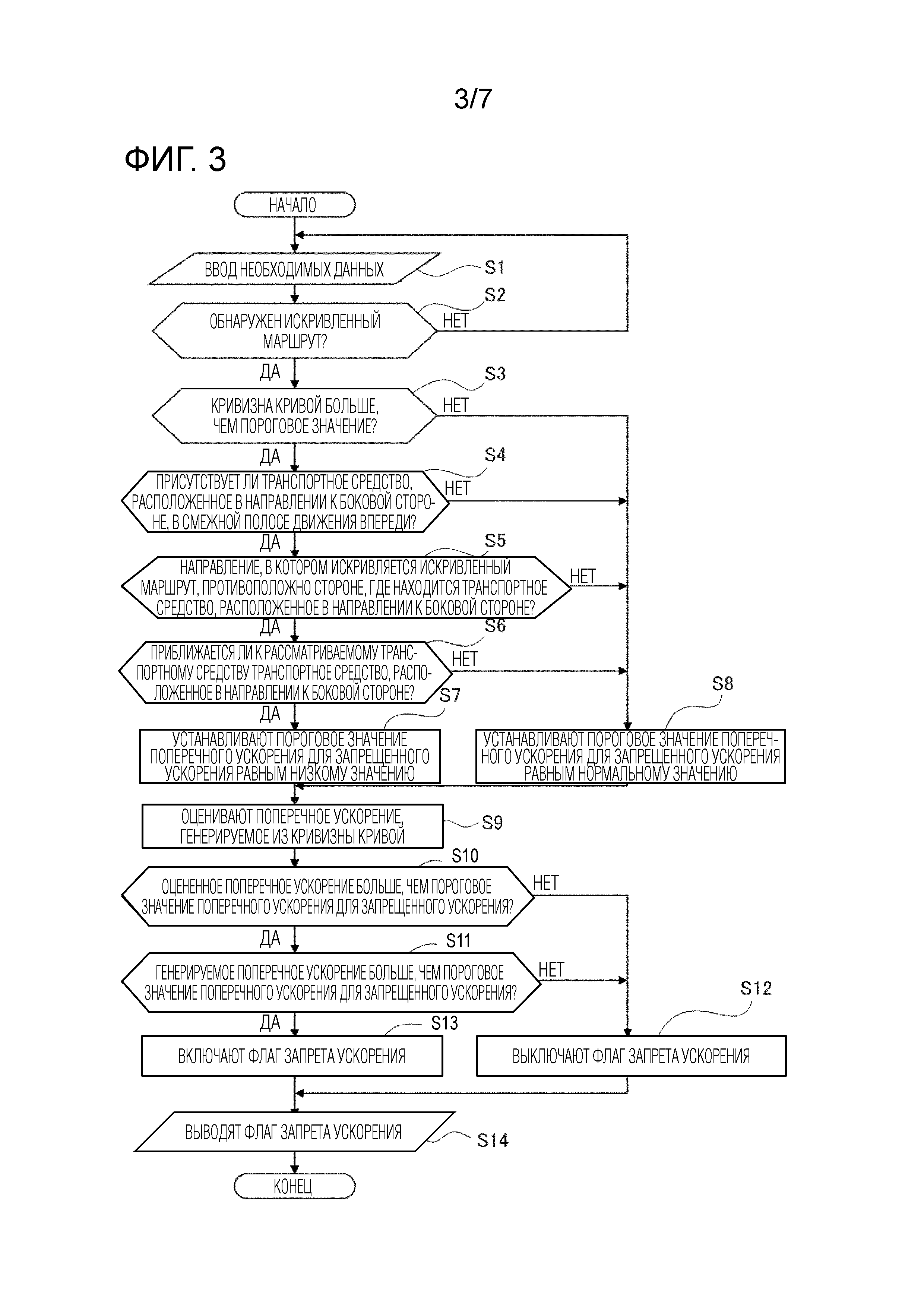
На фиг.3 показана последовательность операций процесса управления движением по искривленному маршруту, выполняемого контроллером 34 движения по искривленному маршруту, предоставленным процессору 3 оценки распознавания для автономного вождения на фиг.2. Этапы в блок-схеме, показанной на Фиг. 3, описаны ниже.
[0035] На этапе S1 после начала управления движением по искривленному маршруту вводятся необходимые данные, используемые в управлении движением по искривленному маршруту, и процесс переходит к этапу S2.
[0036] На этапе S2, после ввода необходимых данных на этапе S1, выполняется оценка того, был ли обнаружен искривленный маршрут. Если ДА (искривленный маршрут был обнаружен), процесс переходит к этапу S3. Если НЕТ (искривленный маршрут не был обнаружен), процесс возвращается к этапу S1.
[0037] На этапе S3, исходя из оценки на этапе S2, что был обнаружен искривленный маршрут, выполняется оценка того, больше ли кривизна кривой на искривленном маршруте, чем пороговое значение. Если ДА (кривизна кривой больше порогового значения), процесс переходит к этапу S4. Если НЕТ (кривизна кривой меньше или равна пороговому значению), процесс переходит к этапу S8.
[0038] «Пороговое значение кривизны кривой» устанавливается при значении, которое исключает искривленные маршруты, имеющие низкую кривизну кривой, так что практически не происходит бокового смещения в рассматриваемом транспортном средстве, даже когда угол поворота низкий, и транспортное средство движется с высокой скоростью, т.е. искривленные маршруты, которые имеют большой радиус кривой и близки к тому, чтобы быть линейными маршрутами.
[0039] На этапе S4, исходя из оценки на этапе S3, что кривизна кривой больше, чем пороговое значение, выполняется оценка того, присутствует ли транспортное средство, расположенное в направлении к боковой стороне (другое транспортное средство), в смежной (соседней) полосе движения впереди рассматриваемого транспортного средства. Если ДА (транспортное средство, расположенное в направлении к боковой стороне, присутствует на смежной полосе движения), процесс переходит к этапу S5. Если НЕТ (на смежной полосе движения нет транспортного средства, расположенного в направлении к боковой стороне), процесс переходит к этапу S8.
[0040] На этапе S5, исходя из оценки на этапе S4, что транспортное средство, расположенное в направлении к боковой стороне, присутствует на смежной полосе движения, выполняется оценка того, находится ли направление, в котором искривляется искривленный маршрут, на противоположной стороне от той, где находится транспортное средство, расположенное в направлении к боковой стороне. Если ДА (направление кривой находится на противоположной стороне от той, где присутствует транспортное средство, расположенное в направлении к боковой стороне), процесс переходит к этапу S6. Если НЕТ (направление кривой находится на той же стороне, что и та, где присутствует транспортное средство, расположенное в направлении к боковой стороне), процесс переходит к этапу S8.
[0041] Фраза «направление кривой находится на противоположной стороне от той, где присутствует транспортное средство, расположенное в направлении к боковой стороне», относится к ситуации, когда другое транспортное средство присутствует на искривленном маршруте с внешней периферийной стороны, смежном с полосой движения рассматриваемого транспортного средства. Фраза «направление кривой находится на той же стороне, что и та, где находится транспортное средство, расположенное в направлении к боковой стороне», относится к ситуации, когда другое транспортное средство находится на внутренней периферийной стороне искривленного маршрута, смежного с полосой движения рассматриваемого транспортного средства.
[0042] На этапе S6, исходя из оценки на этапе S5, что направление кривой находится на противоположной стороне от той, где присутствует транспортное средство, расположенное в направлении к боковой стороне, выполняется оценка того, приближается ли к рассматриваемому транспортному средству транспортное средство, расположенное в направлении к боковой стороне (другое транспортное средство), которое находится на искривленном маршруте с внешней периферийной стороны, смежном с полосой движения рассматриваемого транспортного средства. Если ДА (другое транспортное средство приближается к рассматриваемому транспортному средству), процесс переходит к этапу S7. Если НЕТ (другое транспортное средство не приближается к рассматриваемому транспортному средству), процесс переходит к этапу S8.
[0043] Оценка того, приближаются ли другое транспортное средство и рассматриваемое транспортное средство ближе друг к другу, выполняется посредством: вычисления времени до столкновения (TTC) и временного интервала (THW) из относительной скорости другого транспортного средства и рассматриваемого транспортного средства, а также из информации об относительном расстоянии; количественной оценки степени приближения; и оценки того, уменьшается ли значение степени приближения или увеличивается со временем.
[0044] На этапе S7, исходя из оценки на этапе S6, что другое транспортное средство приближается к рассматриваемому транспортному средству, пороговое значение поперечного ускорения для запрещенного ускорения для запрета ускорения на искривленном маршруте устанавливается таким образом, чтобы оно было ниже нормального порогового значения, и процесс переходит к этапу S9.
[0045] Пороговое значение поперечного ускорения для запрещенного ускорения, установленное на этапе S7, устанавливается равным значению, полученному путем вычитания запаса на дополнительный поворот из верхнего предельного поперечного ускорения, которое ограничено системой управления следованием по полосе движения или устройством управления содействием рулевому управлению, во время движения по искривленному маршруту со скоростью транспортного средства, действующей в то время.
[0046] На этапе S8, следуя оценке на любом из этапов S3, S4, S5 и S6, которая привела к НЕТ, пороговое значение поперечного ускорения для запрещенного ускорения для запрета ускорения на искривленном маршруте устанавливается на нормальном пороговом значении и процесс переходит к этапу S9.
[0047] Пороговое значение поперечного ус корения для запрещенного ускорения, установленное на этапе S8, устанавливается равным значению, при котором запас на дополнительный поворот подавляется из верхнего предельного поперечного ускорения, которое ограничено системой управления следованием по полосе движения или устройством управления содействием рулевому управлению, во время движения по искривленному маршруту со скоростью транспортного средства, действующей в то время.
[0048] На этапе S9, после установления на этапе S7 или этапе S8 порогового значения поперечного ускорения для запрещенного ускорения, оценивается поперечное ускорение, генерируемое из кривизны кривой искривленного маршрута в это время, и процесс переходит к этапу S10.
[0049] «Поперечное ускорение, генерируемое из кривизны кривой», является оцененным поперечным ускорением, вычисленным на основе кривизны кривой и скорости транспортного средства.
[0050] На этапе S10, следуя оценке на этапе S9 поперечного ускорения, сгенерированного из кривизны кривой, выполняется оценка того, является ли оцененное поперечное ускорение большим, чем пороговое значение поперечного ускорения для запрещенного ускорения, установленное на этапе S7 или этапе S8. Если ДА (оцененное поперечное ускорение больше, чем пороговое значение поперечного ускорения для запрещенного ускорения), процесс переходит к этапу S11. Если НЕТ (оцененное поперечное ускорение меньше или равно пороговому значению поперечного ускорения для запрещенного ускорения), процесс переходит к этапу S12.
[0051] На этапе S11, исходя из оценки на этапе S10, что оцененное поперечное ускорение больше, чем пороговое значение поперечного ускорения для запрещенного ускорения, выполняется оценка того, больше ли поперечное ускорение, генерируемое в рассматриваемом транспортном средстве как полученное из датчика 9 поперечного ускорения, чем пороговое значение поперечного ускорения для запрещенного ускорения, установленное на этапе S7 или этапе S8. Если ДА (генерируемое поперечное ускорение больше, чем пороговое значение поперечного ускорения для запрещенного ускорения), процесс переходит к этапу S13. Если НЕТ (генерируемое поперечное ускорение меньше или равно пороговому значению поперечного ускорения для запрещенного ускорения), процесс переходит к этапу S12.
[0052] На этапе S12, исходя из оценки на этапе S10, что оцененное поперечное ускорение меньше или равно пороговому значению поперечного ускорения для запрещенного ускорения, или исходя из оценки на этапе S11, что генерируемое поперечное ускорение меньше или равно пороговому значению поперечного ускорения для запрещенного ускорения, флаг запрета ускорения выключается (флаг запрета ускорения устанавливается на 0), и процесс переходит к этапу S14.
[0053] На этапе S13, исходя из оценки на этапе S10, что оцененное поперечное ускорение больше, чем пороговое значение поперечного ускорения для запрещенного ускорения, и оценки на этапе S11, что генерируемое поперечное ускорение больше, чем пороговое значение поперечного ускорения для запрещенного ускорения, флаг запрета ускорения включается (флаг запрета ускорения устанавливается на 1), и процесс переходит к этапу S14.
[0054] На этапе S14, после установки на 0 на этапе S12 или на 1 на этапе S13, флаг запрета ускорения выводится в генератор 33 различных профилей, и процесс заканчивается.
[0055] Работа описана далее. Работа первого варианта осуществления описана ниже под заголовками: «Уровень техники», «Операция управления движением по искривленному маршруту», «Операция управления движением по искривленному маршруту в ситуации, когда нет транспортного средства, движущегося по искривленному маршруту с внешней периферийной стороны» и «Операция управления движением по искривленному маршруту в ситуации, когда присутствует транспортное средство, движущееся по искривленному маршруту с внешней периферийной стороны».
[0056] [Уровень техники]
В качестве системы содействия водителю при вождении существует система, в которой система управления интервалом для движения при сохранении расстояния от ведущего транспортного средства в пределах диапазона скорости транспортного средства, установленного водителем, и система управления следованием по полосе движения, которая помогает рулевому управлениу, чтобы сохранить положение в полосе движения, используются в сочетании.
[0057] В случае системы содействия вождению, когда рассматриваемое транспортное средство въехало на искривленный маршрут во время движения во время следования за ведущим транспортным средством, и когда ведущее транспортное средство ускорилось во время движения по искривленному маршруту, рассматриваемое транспортное средство автономно ускоряется до установленной скорости транспортного средства из-за управления интервалом с помощью системы управления интервалом. Поэтому, когда скорость движущегося транспортного средства чрезмерно высока во время движения по искривленному маршруту, существует риск того, что будет невозможно сохранить положение в полосе движения, даже используя управление поддержанием полосы движения, выполняемое системой управления следованием по полосе движения, и что рассматриваемое транспортное средство не будет придерживаться желаемой траектории (например, центра полосы движения), отклоняясь к искривленному маршруту с внешней периферийной стороны и от желаемой траектории.
[0058] Однако известно, что определение того, существует ли искривленный участок движения из состояния транспортного средства на искривленном маршруте и предотвращение ускорения на искривленном участке движения, повышает как безопасность, так и комфорт во время движения транспортного средства (например, японская выложенная патентная заявка № 2017-47710).
[0059] В уровне техники принимается конфигурация, в которой ускорение запрещено, когда по состоянию транспортного средства определено, что имеется искривленный участок движения. Поэтому ускорение рассматриваемого транспортного средства запрещено в ситуации, которая включает в себя движение по искривленному маршруту, независимо от того, присутствует ли другое транспортное средство в окрестности рассматриваемого транспортного средства или нет другого транспортного средства в окрестности рассматриваемого транспортного средства.
[0060] Однако благодаря устройству управления рулевым управлением, которое позволяет водителю управлять рулевым управлением, водитель может дополнительно повернуть рулевое колесо и, таким образом, двигаться без отклонения от желаемой траектории даже во время движения на скоростях, на которых невозможно сохранить положение в полосе движения на искривленном маршруте. Следовательно, если на искривленных маршрутах ускорение постоянно запрещено, водитель может почувствовать неудовлетворенность отсутствием ускорения.
[0061] В случае, когда на искривленном маршруте с внешней периферийной стороны присутствует другое транспортное средство, когда рассматриваемое транспортное средство отклоняется от желаемой траектории (например, центра полосы движения), рассматриваемое транспортное средство приближается к другому транспортному средству, и водитель чувствует себя более обеспокоенным в ответ на приближение в большей степени, чем когда нет другого транспортного средства. В частности, в ситуации, когда рассматриваемое транспортное средство автономно ускоряется на искривленном маршруте, следуя за ведущим транспортным средством, водитель чувствует еще большее беспокойство в ответ на отклонение рассматриваемого транспортного средства от желаемой траектории и приближение к другому транспортному средству.
[0062] Однако пороговое значение для запрета ускорения в ситуации, которая включает в себя движение по искривленному маршруту, устанавливается в соответствии с фиксированным значением, независимо от того, присутствует ли другое транспортное средство на искривленном маршруте с внешней периферийной стороны, и значение для разрешения ускорения во время движения по искривленному маршруту принимается так, что недовольство в ответ на отсутствие ускорения устраняется. В этом случае, когда на искривленном маршруте с внешней периферийной стороны присутствует другое транспортное средство, рассматриваемое транспортное средство может ускоряться независимо от того, отклонилось ли рассматриваемое транспортное средство от желаемой траектории (например, от центра полосы движения) или от того, испытывает ли водитель опасения в ответ на приближение другого транспортного средства.
[0063] [Операция управления движением по искривленному маршруту]
В первом варианте осуществления, в отличие от уровня техники, пороговое значение поперечного ускорения для запрещенного ускорения, при котором ускорение рассматриваемого транспортного средства подавляется во время движения по искривленному маршруту, устанавливается таким образом, чтобы оно было ниже, когда другое транспортное средство присутствует на искривленном маршруте с внешней периферийной стороны, смежном с полосой движения рассматриваемого транспортного средства, по сравнению с тем, когда на искривленном маршруте с внешней периферийной стороны отсутствует другое транспортное средство (этапы S1-S8 на фиг. 3). Во время движения по искривленному маршруту пороговое значение поперечного ускорения для запрещенного ускорения сравнивается с поперечным ускорением рассматриваемого транспортного средства (этапы S9-S11 на фиг. 3). В то время как поперечное ускорение рассматриваемого транспортного средства меньше или равно поперечному ускорению рассматриваемого транспортного средства, разрешается движение с ускорением по искривленному маршруту (переход от этапа S12 к этапу S14 на фиг.3). Однако, когда поперечное ускорение рассматриваемого транспортного средства превышает пороговое значение поперечного ускорения для запрещенного ускорения во время движения по искривленному маршруту, движение с ускорением по искривленному маршруту запрещается (переход с этапа S13 на этап S14 на фиг. 3).
[0064] В частности, когда обнаружен искривленный маршрут, условие кривизны кривой (этап S3), условие присутствия другого транспортного средства (этап S4), условие присутствия искривленного маршрута с внешней периферийной стороны (этап S5) и условие приближения к рассматриваемому транспортному средству (этап S6) оцениваются, как показано на блок-схеме последовательности операций на фиг.3. Когда все условия на этапах S3, S4, S5 и S6 удовлетворены, процесс переходит к этапу S7. На этапе S7 пороговое значение поперечного ускорения для запрещенного ускорения устанавливается так, чтобы оно было ниже, чем нормальное пороговое значение.
[0065] Однако, если какое-либо условие из числа условий на этапах S3, S4, S5 и S6 не выполняется, процесс в блок-схеме последовательности операций на фиг.3 переходит к этапу S8. На этапе S8 пороговое значение поперечного ускорения для запрещенного ускорения устанавливается равным нормальному пороговому значению.
[0066] Когда на этапе S7 или этапе S8 устанавливается пороговое значение поперечного ускорения для запрещенного ускорения, процесс переходит от этапа S9 к этапу S10. На этапе S9 оценивается поперечное ускорение, генерируемое из кривизны кривой на искривленном маршруте в это время. На последующем этапе S10 выполняется оценка того, является ли оцененное поперечное ускорение большим, чем пороговое значение поперечного ускорения для запрещенного ускорения, установленное на этапе S7 или этапе S8. На этапе S11 выполняется оценка того, больше ли поперечное ускорение, генерируемое в рассматриваемом транспортном средстве как полученное от датчика 9 поперечного ускорения, чем пороговое значение поперечного ускорения для запрещенного ускорения, установленное на этапе S7 или этапе S8.
[0067] Когда на этапе S10 оценивается, что оцененное поперечное ускорение меньше или равно пороговому значению поперечного ускорения для запрещенного ускорения, процесс переходит к этапу S12. Альтернативно, когда на этапе S10 оценивается, что оцененное поперечное ускорение больше, чем пороговое значение поперечного ускорения для запрещенного ускорения, но на этапе S11 оценивается, что генерируемое поперечное ускорение меньше или равно пороговому значению поперечного ускорения для запрещенного ускорения, процесс аналогично переходит к этапу S12. На этапе S12 флаг запрета ускорения выключается (флаг запрета ускорения устанавливается на 0).
[0068] Однако, если на этапе S10 оценивается, что оцененное поперечное ускорение больше, чем пороговое значение поперечного ускорения для запрещенного ускорения, и на этапе S11 оценивается, что генерируемое поперечное ускорение больше, чем пороговое значение поперечного ускорения для запрещенного ускорения, процесс переходит к этапу S13. На этапе S13 флаг запрета ускорения включается (флаг запрета ускорения устанавливается на 1).
[0069] На этапе S14, когда флаг запрета ускорения установлен на 0 на этапе S12 или установлен на 1 на этапе S13, установленный флаг запрета ускорения выводится в генератор 33 различных профилей.
[0070] Таким образом, вычисленная информация об оцененном поперечном ускорении и обнаруженная информация о поперечном ускорении, генерируемом в рассматриваемом транспортном средстве, используются для установки флага запрета ускорения на 0, в то время как любая из вычисленной информации и обнаруженной информации о поперечном ускорении меньше или равно пороговому значению поперечного ускорения для запрещенного ускорения. Когда оба элемента информации превышают пороговое значение поперечного ускорения для запрещенного ускорения, флаг запрета ускорения устанавливается на 1.
[0071] Следовательно, когда другое транспортное средство не присутствует на искривленном маршруте с внешней периферийной стороны, пороговое значение поперечного ускорения для запрещенного ускорения для запрета ускорения во время движения по искривленному маршруту устанавливается на высоком значении. Таким образом, время для установки флага запрета ускорения задерживается, в результате чего разрешается ускорение рассматриваемого транспортного средства в направлении въезда на искривленный маршрут, и/или возможно проехать весь искривленный маршрут без установленного флага запрета ускорения. Следовательно, возможно движение по искривленному маршруту со скоростью, близкой к скорости транспортного средства, установленной водителем. В частности, это устраняет неудовлетворенность водителя, которая может возникнуть, когда ускорение во время движения по искривленному маршруту постоянно запрещено.
[0072] Однако, когда другое транспортное средство присутствует на искривленном маршруте с внешней периферийной стороны, пороговое значение поперечного ускорения для запрещенного ускорения для запрета ускорения во время движения по искривленному маршруту устанавливается на более низе значение, чем когда другое транспортное средство не присутствует на искривленном маршруте с внешней периферийной стороны. Таким образом, флаг запрета ускорения устанавливается в более ранний момент времени, и ускорение на искривленном маршруте запрещено. Следовательно, во время движения по искривленному маршруту предотвращается отклонение от траектории движения при повороте рассматриваемого транспортного средства в направлении к искривленному маршруту с внешней периферийной стороны, и можно улучшить соответствие между фактической траекторией движения рассматриваемого транспортного средства и желаемой траекторией движения.
[0073] Например, когда другое транспортное средство присутствует на искривленном маршруте с внешней периферийной стороны во время движения с использованием управления следованием по полосе движения на искривленном маршруте, имеющем множество полос движения, водитель чувствует себя более обеспокоенным в ответ на отклонение от желаемой траектории и приближение к другому транспортному средству в большей степени, чем при отсутствии другого транспортного средства, как описано выше. Однако во время въезда на искривленный маршрут флаг запрета ускорения устанавливается в более ранний момент времени, благодаря чему можно запретить ускорение до того, как водитель испытает страх, связанный с приближением к другому транспортному средству.
[0074] [Операция управления движением по искривленному маршруту в ситуации, когда нет транспортного средства, движущегося по искривленному маршруту с внешней периферийной стороны]
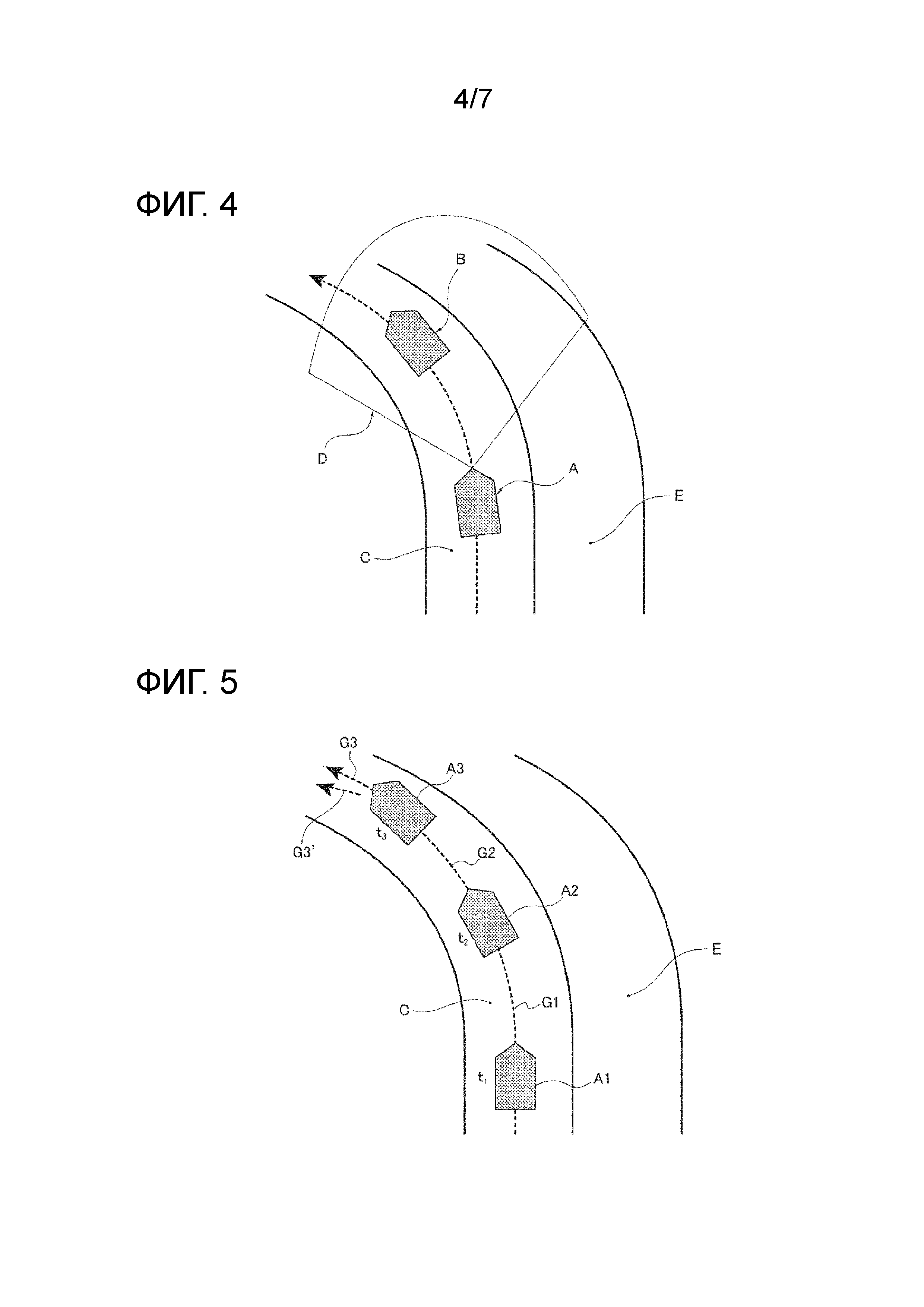
На фиг.4 показан общий вид случая, когда рассматриваемое транспортное средство поворачивает по искривленному маршруту в ситуации, когда нет транспортного средства, движущегося по искривленному маршруту с внешней периферийной стороны. На Фиг. 5 показано изменение положения рассматриваемого транспортного средства с течением времени в той же ситуации. На Фиг. 6 показаны различные профили относительно времени в той же ситуации. Операция управления движением по искривленному маршруту в ситуации, когда нет транспортного средства, движущегося по искривленному маршруту с внешней периферийной стороны, описана ниже со ссылкой на фиг.4-6.
[0075] На фиг. 4 показан сценарий, в котором рассматриваемое транспортное средство A въезжает на искривленный маршрут по полосе C движения рассматриваемого транспортного средства, следуя за ведущим транспортным средством B в соответствии с системой управления интервалом, и ведущее транспортное средство B ускоряется при движении по искривленному маршруту. В этом сценарии датчик 1 распознавания (камера, радар, лазер, сонар и т.д.), установленный в рассматриваемом транспортном средстве, используется для определения, присутствует ли другое транспортное средство F на искривленном маршруте E с внешней периферийной стороны, включенном в диапазон D распознавания впереди рассматриваемого транспортного средства. Как показано на фиг.4, когда другое транспортное средство F не присутствует на искривленном маршруте E с внешней периферийной стороны, пороговое значение ay_th1 поперечного ускорения для запрещенного ускорения для запрета ускорения, когда на кривой, устанавливается при нормальном значении, близком к ограничению угла поворота устройства содействия рулевому управлению. То же самое относится и к случаю, в котором, например, водитель изменяет установленную скорость транспортного средства во время движения по искривленному маршруту, и система управления интервалом ускоряется, потому что установленная скорость транспортного средства увеличилась до значения, превышающего текущую скорость транспортного средства, причем упомянутый случай не связан с наличием ведущего транспортного средства B.
[0076] На фиг.5 показан сценарий, в котором, когда рассматриваемое транспортное средство A въезжает на искривленный маршрут по полосе C движения рассматриваемого транспортного средства, другое транспортное средство F не присутствует на искривленном маршруте E с внешней периферийной стороны. В момент времени t1 на фиг.5, когда ведущее транспортное средство B ускоряется, рассматриваемое транспортное средство A1 начинает ускоряться в соответствии с системой управления интервалом. В период от времени t1, когда рассматриваемое транспортное средство A1 начало ускоряться, до момента времени t2, в который поперечное ускорение, генерируемое в рассматриваемом транспортном средстве A1, меньше или равно нормальному пороговому значению поперечного ускорения ay_th1 для запрещенного ускорения, «установить флаг запрета ускорения на 0» выводится из контроллера 34 движения по искривленному маршруту.
[0077] Таким образом, с момента времени t1 до момента времени t2 рассматриваемое транспортное средство движется по искривленному маршруту, так что разрешается ускорение во время движения по искривленному маршруту, и таким образом, что увеличение угла δ поворота до угла δsup1 поворота, увеличение поперечного ускорения ay до порогового значения ay_th1 поперечного ускорения для запрещенного ускорения, и увеличение скорости V транспортного средства до скорости Vsup1 транспортного средства разрешается, как показано на фиг.6.
[0078] Нормальное пороговое значение ay_th1 поперечного ускорения для запрещенного ускорения, которое является верхним предельным значением поперечного ускорения ay, является значением, близким к верхнему предельному поперечному ускорению, для определения ограничения угла поворота устройства содействия рулевому управлению и устанавливается на относительно низкое значение. Следовательно, даже если допустимо увеличение поперечного ускорения ay до порогового значения ay_th1 поперечного ускорения для запрещенного ускорения, траектория G1 движения от положения рассматриваемого транспортного средства A1 до положения рассматриваемого транспортного средства A2 не отклоняется или смещается в направлении к искривленному маршруту E с внешней периферийной стороны от траектории в центре полосы C движения рассматриваемого транспортного средства, которая является желаемой траекторией во время движения по угловому маршруту от положения рассматриваемого транспортного средства A1 до положения рассматриваемого транспортного средства A2 на фиг. 5.
[0079] В момент времени t2 на фиг.5, когда поперечное ускорение, генерируемое в рассматриваемом транспортном средстве A2, достигает нормального порогового значения ay_th1 поперечного ускорения для запрещенного ускорения для запрета ускорения во время движения по искривленному маршруту, «установить флаг запрета ускорения на 1» выводится из контроллера 34 движения по искривленному маршруту.
[0080] Таким образом, после того, как наступил момент времени t2, ускорение во время движения по искривленному маршруту запрещается, и рассматриваемое транспортное средство движется по искривленному маршруту, в то время как угол δsusp1 поворота в момент времени t2, поперечное ускорение (пороговое значение ay_th1 поперечного ускорения для запрещенного ускорения) в момент времени t2, и скорость Vsup1 транспортного средства в момент времени t2 поддерживаются, как показано на Фиг. 6.
[0081] Нормальное пороговое значение ay_th1 поперечного ускорения для запрещенного ускорения устанавливается на относительно более низкое значение, чем верхнее предельное поперечное ускорение для определения ограничения угла поворота устройства содействия рулевому управлению. Следовательно, когда поддерживается пороговое значение ay_th1 поперечного ускорения для запрещенного ускорения, траектория G2 движения из положения рассматриваемого транспортного средства A2 в положение рассматриваемого транспортного средства A3 не отклоняется от желаемой траектории, если радиус кривой вперед не уменьшается во время проехать по угловому маршруту от положения рассматриваемого транспортного средства A2 до положения рассматриваемого транспортного средства A3 на Фиг. 5.
[0082] В момент времени t3 на фиг.5, когда была предпринята попытка сохранить траекторию в центре полосы C движения рассматриваемого транспортного средства, радиус кривой в направлении вперед рассматриваемого транспортного средства A3 уменьшается, и траектория G3 движения рассматриваемого транспортного средства A3 изменяется на траекторию движения G3’. В этом случае, как показано на Фиг. 6, возможно, благодаря содействию рулевому управлению, повернуть дополнительно на величину δmergin1 от угла поворота δsup1, когда ускорение запрещено из-за нормального порогового значения ay_th1 поперечного ускорения для запрещенного ускорения до ограничения δmax угла поворота при содействии рулевому управлению. Следовательно, даже когда траектория G3 движения от рассматриваемого транспортного средства A3 изменяется на траекторию G3’ движения, рассматриваемое транспортное средство A3 будет достигать движения по искривленному маршруту вдоль траектории G3’ движения, которая является желаемой траекторией от рассматриваемого транспортного средства A3, и не будет отклоняться от желаемой траектории, до тех пор, пока возможно реагирование в диапазоне дополнительного поворота на угол поворота δ.
[0083] [Операция управления движением по искривленному маршруту в ситуации, когда присутствует транспортное средство, движущееся по искривленному маршруту с внешней периферийной стороны]
На фиг.7 показан общий вид случая, когда рассматриваемое транспортное средство поворачивает по искривленному маршруту в ситуации, когда транспортное средство движется по искривленному маршруту с внешней периферийной стороны. На Фиг. 8 показано изменение положения рассматриваемого транспортного средства с течением времени в той же ситуации. На Фиг. 9 показаны различные профили относительно времени в той же ситуации. Операция управления движением по искривленному маршруту в ситуации, когда присутствует транспортное средство, движущееся по искривленному маршруту с внешней периферийной стороны, описана ниже со ссылкой на фиг.7-9.
[0084] На фиг.7 показан сценарий, в котором рассматриваемое транспортное средство A въезжает на искривленный маршрут по полосе C движения рассматриваемого транспортного средства, следуя за ведущим транспортным средством B в соответствии с системой управления интервалом, и ведущее транспортное средство B ускоряется при движении по искривленному маршруту. В этом сценарии датчик 1 распознавания (камера, радар, лазер, сонар и т.д.), установленный в рассматриваемом транспортном средстве, используется для определения, присутствует ли другое транспортное средство F на искривленном маршруте E с внешней периферийной стороны, включенном в диапазон распознавания впереди рассматриваемого транспортного средства. Как показано на Фиг. 7, когда другое транспортное средство F присутствует на искривленном маршруте E с внешней периферийной стороны, пороговое значение ay_th2 поперечного ускорения для запрещенного ускорения для запрета ускорения, когда на кривой, устанавливается на более низкое значение, чем пороговое значение ay_th1 поперечного ускорения для запрещенного ускорения, которое используется, когда другое транспортное средство F отсутствует на искривленном маршруте E с внешней периферийной стороны.
[0085] На фиг.8 показан сценарий, в котором, когда рассматриваемое транспортное средство A въезжает на искривленный маршрут по полосе C движения рассматриваемого транспортного средства, другое транспортное средство F присутствует на искривленном маршруте E с внешней периферийной стороны. В момент времени t1, когда ведущее транспортное средство B ускоряется, рассматриваемое транспортное средство A1 начинает ускоряться в соответствии с системой управления интервалом. В период от времени t1, когда рассматриваемое транспортное средство A1 начало ускоряться, до момента времени t2’, в который поперечное ускорение, генерируемое в рассматриваемом транспортном средстве A1, меньше или равно пороговому значению ay_th2 поперечного ускорения для запрещенного ускорения, «установить флаг запрета ускорения на 0» выводится из контроллера 34 движения по искривленному маршруту.
[0086] Таким образом, с момента времени t1 до момента времени t2’ рассматриваемое транспортное средство движется по искривленному маршруту, так что разрешается ускорение во время движения по искривленному маршруту, и таким образом, что увеличение угла δ поворота до угла δsusp2 поворота, увеличение поперечного ускорения ay до порогового значения ay_th2 поперечного ускорения для запрещенного ускорения, а также увеличение скорости V транспортного средства до скорости Vsup2 транспортного средства разрешены, как показано на Фиг. 9.
[0087] Пороговое значение ay_th2 поперечного ускорения для запрещенного ускорения, которое является верхним предельным значением поперечного ускорения ay, устанавливается на значение, меньшее, чем пороговое значение ay_th1 поперечного ускорения для запрещенного ускорения. Следовательно, даже если разрешено увеличение поперечного ускорения ay до порогового значения ay_th2 поперечного ускорения для запрещенного ускорения, траектория G1’ движения от положения рассматриваемого транспортного средства A1 до положения рассматриваемого транспортного средства A2’ не отклоняется и не смещается в направлении к искривленному маршруту E с внешней периферийной стороны от траектории в центре полосы C движения рассматриваемого транспортного средства, которая является желаемой траекторией во время движения по угловому маршруту от положения рассматриваемого транспортного средства A1 до положения рассматриваемого транспортного средства A2’ на Фиг. 8.
[0088] В момент времени t2’ на фиг.8, когда поперечное ускорение, генерируемое в рассматриваемом транспортном средстве A2’, достигает порогового значения ay_th2 поперечного ускорения для запрещенного ускорения для запрета ускорения во время движения по искривленному маршруту, «установить флаг запрета ускорения на 1» выводится из контроллера 34 движения по искривленному маршруту. Таким образом, ускорение во время движения по искривленному маршруту запрещено, и после наступления времени t2’ рассматриваемое транспортное средство движется по искривленному маршруту, в то время как угол поворота δsusp2 (меньше чем δsusp1) в момент времени t2’, поперечное ускорение (пороговое значение ay_th2 поперечного ускорения для запрещенного ускорения) в момент времени t2’ и скорость Vsup2 (меньше, чем скорость Vsup1 транспортного средства) в момент времени t2’поддерживаются, как показано на Фиг. 9.
[0089] Пороговое значение ay_th2 поперечного ускорения для запрещенного ускорения установлено на еще более низком значении, чем пороговое значение ay_th1 поперечного ускорения для запрещенного ускорения. Следовательно, когда поддерживается пороговое значение ay_th2 поперечного ускорения для запрещенного ускорения траектория G2’ движения от положения рассматриваемого транспортного средства A2’ до положения рассматриваемого транспортного средства A3 не отклоняется от желаемой траектории и не приближается к другому транспортному средству F, присутствующему на искривленном маршруте E с внешней периферийной стороны, если только радиус кривой в направлении спереди не уменьшается во время движения по угловому маршруту от положения рассматриваемого транспортного средства A2’ до положения рассматриваемого транспортного средства A3 на фиг.8.
[0090] В момент времени t3 на фиг.8, когда была предпринята попытка сохранить траекторию в центре полосы C движения рассматриваемого транспортного средства, радиус кривой в направлении вперед рассматриваемого транспортного средства A3 уменьшается, и траектория G3 движения рассматриваемого транспортного средства A3 изменяется на траекторию G3’ движения. В этом случае, как показано на Фиг. 9, можно поворачивать дополнительно, благодаря содействия рулевому управлению, с запасом δmergin2 (больше, чем δmergin1) от угла δsup2 поворота, когда ускорение запрещено из-за порогового значения ay_th2 поперечного ускорения для запрещенного ускорения до ограничения δmax угла поворота при содействии рулевому управлению. Следовательно, даже когда траектория G3 движения от рассматриваемого транспортного средства A3 изменяется на траекторию G3’ движения, рассматриваемое транспортное средство A3 будет достигать движения по искривленному маршруту вдоль траектории G3’ движения, которая является желаемой траекторией от рассматриваемого транспортного средства A3, и не будет отклоняться от желаемой траектории до тех пор, пока возможно реагирование в диапазоне дополнительного поворота на дополнительно увеличенный угол δ поворота.
[0091] Эффекты настоящего раскрытия описаны ниже. В способе и устройстве для управления движением транспортного средства с содействием вождению в первом варианте осуществления получают эффекты, перечисленные ниже.
[0092] (1) Настоящее раскрытие обеспечивается контроллером (контроллером 34 движения по искривленному маршруту), который подавляет ускорение рассматриваемого транспортного средства A по искривленному маршруту во время движения по полосе C движения рассматриваемого транспортного средства. В способе управления движением транспортного средства с содействием вождению искривленный маршрут обнаруживается на полосе C движения рассматриваемого транспортного средства, по которой движется рассматриваемое транспортное средство A (этап S2 на фиг.3). Обнаруживается, присутствует ли другое транспортное средство в окрестности рассматриваемого транспортного средства (этап S4 на фиг.3). Во время движения по искривленному маршруту пороговое значение поведения при повороте (пороговое значение поперечного ускорения для запрещенного ускорения), установленное в качестве граничного значения для подавления ускорения рассматриваемого транспортного средства A, устанавливается таким образом, чтобы оно было ниже, когда другое транспортное средство F присутствует на искривленном маршруте E с внешней периферийной стороны, смежной с полосой C движения рассматриваемого транспортного средства, чем когда другое транспортное средство F не присутствует на искривленном маршруте E с внешней периферийной стороны (этапы S5-S8 на фиг. 3). Значение показателя поведения при повороте (информация об ускорении), которое является значением для оценки состояния поведения при повороте рассматриваемого транспортного средства A, получается во время движения по искривленному маршруту, и определяется, является ли значение показателя поведения при повороте большим, чем пороговое значение поведения при повороте (этапы S9-S11 на фиг.3). После определения того, что значение показателя поведения при повороте меньше или равно пороговому значению поведения при повороте, движение с ускорением по искривленному маршруту разрешается, но после определения того, что значение показателя поведения при повороте больше порогового значения поведения при повороте, движение с ускорением по искривленному маршруту подавляется (этапы S12-S14 на фиг. 3). Следовательно, можно обеспечить способ управления движением транспортного средства с содействием вождению, в котором опасение со стороны водителя снижается, в то же время допускается большее количество ситуаций, в которых возможно ускорение на искривленном маршруте.
[0093] (2) Выполняется определение в отношении того, приближается ли другое транспортное средство F, присутствующее на искривленном маршруте E с внешней периферийной стороны, смежном с полосой C движения рассматриваемого транспортного средства, к рассматриваемому транспортному средству A (этап S6 на фиг. 3). Пороговое значение поведения при повороте (пороговое значение поперечного ускорения для запрещенного ускорения) устанавливается таким образом, чтобы оно было ниже при определении того, что другое транспортное средство F, присутствующее на искривленном маршруте E с внешней периферийной стороны, приближается к рассматриваемому транспортному средству A, чем после определения того, что другое транспортное средство F не приближается к рассматриваемому транспортному средству A (этапы S7 и S8 на фиг.3). Следовательно, в дополнение к эффекту в (1) выше, возможно допустить еще большее число ситуаций, когда возможно ускорение на искривленном маршруте. В частности, когда другое транспортное средство F присутствует на искривленном маршруте E с внешней периферийной стороны, смежном с полосой C движения рассматриваемого транспортного средства, водитель чувствует себя более обеспокоенным в случае, когда другое транспортное средство F приближается к рассматриваемому транспортному средству A, и снижение этого опасения является приоритетным. Тем не менее, в случае, когда другое транспортное средство F не приближается к рассматриваемому транспортному средству A, водитель чувствует себя менее встревоженным, и, таким образом, приоритетом является устранение неудовлетворенности водителя, которое может возникнуть, когда ускорение ограничено.
[0094] (3) Пороговое значение поведения при повороте для подавления ускорения рассматриваемого транспортного средства A сконфигурировано как пороговое значение поперечного ускорения (пороговое значение поперечного ускорения для запрещенного ускорения). Значение показателя поведения при повороте рассматриваемого транспортного средства A сконфигурировано как информация о поперечном ускорении, связанная с рассматриваемым транспортным средством A (этапы S7-S11 на фиг.3). Следовательно, в дополнение к эффектам в (1) и (2) выше, можно соответствующим образом управлять поперечным перемещением рассматриваемого транспортного средства A, просто отслеживая один фрагмент информации о поперечном ускорении во время движения по искривленному маршруту.
[0095] (4) Оцененное поперечное ускорение, оцененное и вычисленное в соответствии с кривизной кривой и скоростью транспортного средства, и поперечное ускорение, генерируемое в рассматриваемом транспортном средстве A и обнаруженное датчиком 9 поперечного ускорения, используются в качестве информации о поперечном ускорении, связанной с рассматриваемым транспортным средством (этапы S9-S11 на Фиг. 3). Следовательно, в дополнение к эффекту в (3) выше, можно отслеживать одну часть информации о поперечном ускорении, используя два типа значений, то есть вычисленное значение и обнаруженное значение, во время движения по искривленному маршруту, тем самым оптимизируя определение условий для разрешения или подавления движения с ускорением по искривленному маршруту.
[0096] (5) В то время как оцененное поперечное ускорение определяется как меньшее или равное пороговому значению поперечного ускорения (пороговое значение поперечного ускорения для запрещенного ускорения), или в то время как поперечное ускорение, генерируемое в рассматриваемом транспортном средстве A, определяется как меньшее или равное пороговому значению поперечного ускорения, движение с ускорением по искривленной трассе разрешено. Когда определено, что оцененное поперечное ускорение больше, чем пороговое значение поперечного ускорения, или когда определено, что поперечное ускорение, генерируемое в рассматриваемом транспортном средстве A, превышает пороговое значение поперечного ускорения, движение с ускорением по искривленному маршруту подавляется (этапы S10-S14 на Фиг. 3). Следовательно, в дополнение к эффекту в (4) выше, условия определения для подавления движения с ускорением на искривленном маршруте становятся более строгими, что позволяет допустить большее число ситуаций, в которых возможно ускорение на искривленном маршруте.
[0097] (6) Настоящее раскрытие обеспечивается контроллером (контроллером 34 движения по искривленному маршруту), который подавляет ускорение рассматриваемого транспортного средства A по искривленному маршруту во время движения по полосе C движения рассматриваемого транспортного средства. В устройстве для управления движением транспортного средства с содействием вождению контроллер (контроллер 34 движения по искривленному маршруту) имеет блок 34a обнаружения искривленного маршрута, блок 34f обнаружения другого транспортного средства, блок 34b установления порогового значения (блок установки порогового значения поведения при повороте), блок 34d определения поперечного ускорения (блок определения значения показателя поведения при повороте) и блок 34e управления ускорением при повороте. Блок 34a обнаружения искривленного маршрута обнаруживает искривленный маршрут в полосе C движения рассматриваемого транспортного средства, по которой движется рассматриваемое транспортное средство A. Блок 34f обнаружения другого транспортного средства обнаруживает, присутствует ли другое транспортное средство F в окрестности рассматриваемого транспортного средства A. Во время движения по искривленному маршруту блок 34b установления порогового значения устанавливает пороговое значение поведения при повороте (пороговое значение поперечного ускорения для запрещенного ускорения), установленное в качестве граничного значения для подавления ускорения рассматриваемого транспортного средства A, причем упомянутое пороговое значение устанавливается так, чтобы быть ниже, когда другое транспортное средство F присутствует на искривленном маршруте E с внешней периферийной стороны, смежном с полосой C движения рассматриваемого транспортного средства, чем когда другое транспортное средство F отсутствует на искривленном маршруте E с внешней периферийной стороны. Блок 34d определения поперечного ускорения получает поперечное ускорение (значение показателя поведения при повороте), которое является значением для оценки состояния поведения при повороте рассматриваемого транспортного средства A во время движения по искривленному маршруту и определяет, больше ли значение показателя поведения при повороте, чем пороговое значение поведения при повороте. После определения того, что значение показателя поведения при повороте меньше или равно пороговому значению поведения при повороте, блок 34e управления ускорением при повороте разрешает движение с ускорением по искривленному маршруту, но после определения того, что значение показателя поведения при повороте больше, чем пороговое значение поведения при повороте, блок 34e управления ускорением при повороте подавляет движение с ускорением по искривленному маршруту (фиг.2). Следовательно, можно обеспечить устройство для управления движением транспортного средства с содействием вождению, в котором степень опасения со стороны водителя снижается, в то же время допускается большее число ситуаций, когда возможно ускорение на искривленном маршруте.
[0098] Способ и устройство для управления движением транспортного средства с содействием вождению согласно настоящему раскрытию описаны выше на основе первого варианта осуществления. Однако конкретная конфигурация настоящего раскрытия не ограничена первым вариантом осуществления; допускаются различные конструктивные изменения, дополнения и другие подобные модификации, пока эти модификации не выходят за пределы сущности изобретения согласно формуле изобретения.
[0099] В первом варианте осуществления был описан пример, в котором пороговое значение поперечного ускорения для запрещенного ускорения использовалось в качестве порогового значения поведения при повороте, установленного в качестве граничного значения для подавления ускорения рассматриваемого транспортного средства A, и в котором поперечное ускорение было использовано в качестве значения показателя поведения при повороте, которое является значением для оценки состояния поведения при повороте рассматриваемого транспортного средства А. Однако пороговое значение поведения при повороте и значение показателя поведения при повороте не ограничиваются поперечным ускорением. Вместо этого,среди прочего, комбинация скорости рыскания и скорости транспортного средства, комбинации угла поворота и скорости транспортного средства, только угол поворота, величина смещения от целевой траектории на кривой или поперечное положения от рассматриваемого транспортного средства до белой линии могут быть использованы в качестве этих значений. Вкратце, эти значения должны быть индексными значениями для оценки состояния поведения при повороте рассматриваемого транспортного средства.
[0100] В первом варианте осуществления был описан пример (с градиентом ускорения, установленным в 0), в котором ускорение на искривленном маршруте было запрещено с использованием флага запрета ускорения в качестве подавления движения с ускорением по искривленному маршруту. Однако ограничение градиента ускорения на искривленном маршруте, чтобы оно было низким, является еще одним примером подавления движения с ускорением на искривленном маршруте.
[0101] В первом варианте осуществления был описан пример, в котором картографические данные 4 и информация о положении рассматриваемого транспортного средства, полученная из GPS 2, использовались для обнаружения искривленного маршрута и искривленного маршрута с внешней периферийной стороны. Однако другие примеры обнаружения искривленного маршрута и искривленного маршрута с внешней периферийной стороны включают в себя: обнаружение в соответствии с поперечным ускорением или данными на основе бортового устройства, такого как радар; и обнаружение с использованием информации, полученной в соответствии со связью между транспортными средствами, связью между маршрутом и транспортным средством и т.д.
[0102] В первом варианте осуществления был описан пример, в котором в качестве момента времени для обнаружения искривленного маршрута и искривленного маршрута на внешней периферийной стороне картографические данные 4 и информация о положении рассматриваемого транспортного средства, полученная из GPS 2, были использованы для прогнозирования искривленного маршрута на линейном маршруте перед въездом на искривленный маршрут. Однако время во время движения по искривленному маршруту от начала въезда на искривленный маршрут до конца выезда из искривленного маршрута также может использоваться в качестве времени для обнаружения искривленного маршрута и искривленного маршрута с внешней периферийной стороны.
[0103] В первом варианте осуществления был описан пример, в котором кривизна кривой, используемая при оценке поперечного ускорения, была получена из картографических данных 4. Однако кривизна кривой, используемая при оценке поперечного ускорения, может быть получена в режиме реального времени камерой и т.д. или может быть получена из предварительно собранной картографической информации и т.д.
[0104] В первом варианте осуществления был описан пример, в котором информация о белой линии была получена в режиме реального времени бортовой камерой. Однако информация о белой линии может быть получена из предварительно собранной картографической информации и т.д.
[0105] В первом варианте осуществления был описан пример, в котором поперечное ускорение, генерируемое в рассматриваемом транспортном средстве, было получено датчиком 9 поперечного ускорения. Однако поперечное ускорение, генерируемое в рассматриваемом транспортном средстве, может быть значением, оцененным с использованием угла поворота от датчика угла поворота и скорости рыскания от датчика скорости рыскания.
[0106] В первом варианте осуществления был описан пример, в котором способ и устройство для управления движением согласно настоящему раскрытию были применены к транспортному средству с содействием вождению, которое имеет в качестве основы транспортное средство с электроприводом, включающее в себя приведение в движение посредством электромотора, причем транспортное средство с содействием вождению демонстрирует, когда выбран автономный режим вождения, функцию автономного вождения, полученную из управления рулевым управлением/вождением/торможением по полосе движения, по которой движется рассматриваемое транспортное средство. Однако способ и устройство для управления движением согласно настоящему раскрытию также могут применяться к гибридным транспортным средствам, оснащенным как электромотором, так и двигателем в качестве источников движения, и также могут применяться к транспортным средствам с двигателем, оснащенным только двигателем в качестве источника движения. Кроме того, способ и устройство для управления движением в соответствии с настоящим раскрытием могут также применяться к транспортным средствам, в которых вождению водителя осуществляют содействие посредством отображения ограничения скорости или ограничения угла поворота во время движения по искривленному маршруту, к транспортным средствам с содействием вождению, в которых управление ограничением скорости выполняется во время движения по искривленному маршруту, или к транспортным средствам с содействием вождению, в которых управление ограничением угла поворота выполняется во время движения по искривленному маршруту. Кроме того, способ и устройство для управления движением согласно настоящему раскрытию также могут применяться, в частности, к транспортным средствам с автономным вождением, которые демонстрируют полностью автоматическую функцию вождения, включающую в себя изменения полосы движения в соответствии с окружающей средой, когда выбран режим автономного вождения.
Реферат
Изобретение относится к транспортным средствам. В способе управления движением транспортного средства с содействием вождению обнаруживают искривленный маршрут на полосе движения рассматриваемого транспортного средства. Обнаруживают присутствие другого транспортного средства в окрестностях рассматриваемого транспортного средства. Устанавливают пороговое значение поведения при повороте. Получают значение показателя поведения при повороте и определяют, больше ли значение показателя поведения при повороте, чем пороговое значение поведения при повороте. Разрешают движение с ускорением по искривленному маршруту при определении того, что значение показателя поведения при повороте меньше или равно пороговому значению поведения при повороте, но подавляют движение с ускорением по искривленному маршруту при определении того, что значение показателя поведения при повороте больше порогового значения поведения при повороте. Повышается комфорт при вождении. 2 н. и 4 з.п. ф-лы, 9 ил.
Комментарии