Способ и устройство управления системой автоматического поддержания скорости транспортного средства - RU2501681C2
Код документа: RU2501681C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления системой автоматического поддержания скорости по п.1 прилагаемой формулы изобретения. В частности, изобретение применимо в механических транспортных средствах. Изобретение также относится к устройству, предназначенному для такого управления системой автоматического поддержания скорости согласно преамбуле п.10 прилагаемой формулы изобретения.
Настоящее изобретение также относится к компьютерной программе, компьютерному программному продукту и запоминающей среде компьютера, при этом все из перечисленного предназначено для применения с компьютером для осуществления упомянутого способа.
Уровень техники
Система автоматического поддержания скорости ("круиз-контроль") транспортного средства (далее - автомобиль) помогает водителю поддерживать заданную скорость движения автомобиля без необходимости выжимать педаль акселератора. Может быть предусмотрен блок управления для регулирования тяговой мощности, поступающей, например, от двигателя внутреннего сгорания и(или) электродвигателя, с целью поддержания упомянутой заданной скорости. Известны альтернативные решения, в которых может быть предусмотрен блок управления для регулирования как тяговой мощности, так и тормозной мощности автомобиля. Так, например, блок управления может регулировать также работу вспомогательных тормозов и(или) рабочих тормозов с целью поддержания заданной скорости. Если такой автомобиль дополнительно оснащен автоматической трансмиссией, блок управления трансмиссией будет управлять выбором и переключением передач.
В патенте GB 2319635 описан контроллер движущей силы автомобиля, содержащий навигационный прибор с антенной GPS (глобальной системы определения местоположения). Одной из характеристик движущей силы может являться коэффициент дросселирования дроссельной заслонки с электроприводом, схема переключения передач автоматической трансмиссии или соотношение воздух - топливо. Система управления автоматически регулирует параметры двигателя и выбор передач в зависимости от преобладающих дорожных условий, определяемых навигационным прибором.
В заявке US 20050055157 описана система навигации, имеющая средство определения маршрута, обеспечивающего оптимизированный расход топлива. Эта система навигации способна определять начальный пункт и конечный пункт возможного маршрута движения автомобиля, и на основании желательного времени нахождения в пути может вычисляться расход топлива и осуществляться управление контроллером автоматического поддержания скорости с целью прибытия в упомянутый конечный пункт в соответствии с упомянутым временем нахождения в пути.
Даже с учетом возможности некоторой оптимизации существующих решений в том, что касается расхода топлива, всегда существует потребность в еще большем снижении расхода топлива.
Соответственно, в основу настоящего изобретения положена задача дополнительного снижения расхода топлива, когда в автомобиле действует система автоматического поддержания скорости.
Раскрытие изобретения
Так, основной задачей настоящего изобретения является устранение указанного недостатка и создание усовершенствованного способа управления системой автоматического поддержания скорости автомобиля. Это достигнуто посредством упомянутого во вводной части способа, который охарактеризован в п.1. Решение задачи изобретения также достигнуто посредством упомянутого во вводной части устройства, которое охарактеризовано в п.8.
В изобретении предложен способ управления системой автоматического поддержания скорости автомобиля, включающий шаги (но необязательно ограниченный ими):
определения начального пункта и пункта назначения возможного маршрута движения автомобиля,
определения желательного времени нахождения в пути по маршруту движения,
вычисления и установления предельных значений для параметров системы автоматического поддержания скорости с целью прибытия в пункт назначения согласно времени нахождения в пути с минимально возможным расходом топлива,
повторного вычисления предельных значений, если во время движения от начального пункта к пункту назначения произошло непредвиденное событие, и это событие влияет на среднюю скорость движения автомобиля, и
выбора, в связи с упомянутым шагом вычисления и установления предельных значений и с учетом желательного времени нахождения в пути, схемы переключения передач, которая согласно расчетам обеспечивает наименьший расход топлива.
В одном из вариантов осуществления изобретения предельными значениями параметров является одно или несколько из следующего:
верхний предел ускорения автомобиля,
верхний предел замедления автомобиля,
верхний предел снижения скорости относительно заданной скорости движения автомобиля,
верхний предел превышения скорости относительно заданной скорости движения автомобиля,
максимальный доступный крутящий момент двигателя,
пределы регулирования системы автоматического поддержания скорости,
заданная скорость,
ограничение, касающееся момента включения/выключения функции свободного хода.
В одном из дополнительных вариантов осуществления изобретения предусмотрено повторное вычисление упомянутых предельных значений, если во время движения от начального пункта к пункту назначения произошло непредвиденное событие, и это событие влияет на среднюю скорость движения автомобиля.
В другом варианте осуществления способа предусмотрен выбор, в связи с упомянутым шагом вычисления и установления предельных значений и с учетом желательного времени нахождения в пути, схемы переключения передач, которая согласно расчетам обеспечивает наименьший расход топлива.
В одном из вариантов осуществления способа дополнительно предусмотрен выбор новой схемы переключения передач, которая согласно расчетам обеспечивает наименьший расход топлива, если во время движения от начального пункта к пункту назначения произошло непредвиденное событие, и это событие влияет на среднюю скорость движения автомобиля.
В одном из вариантов осуществления способа дополнительно предусмотрен выбор, в связи с упомянутым шагом вычисления и установления предельных значений и с учетом желательного времени нахождения в пути, одного из двух или более возможных маршрутов движения от начального пункта к пункту назначения, который согласно расчетам обеспечивает наименьший расход топлива.
В одном из дополнительных вариантов осуществления способа дополнительно предусмотрен пересмотр выбора маршрута, если произошло непредвиденное событие, которое влияет на среднюю скорость движения автомобиля, при этом упомянутый пересмотр осуществляется, исходя из текущего положения автомобиля в качестве начального пункта.
В одном из вариантов осуществления способа до шаги определения желательного времени нахождения в пути дополнительно предусмотрен расчет и прогнозирование первого времени нахождения в пути, исходя из начального пункта, пункта назначения и средней скорости движения автомобиля по маршруту.
В одном из вариантов осуществления способа во время движения от начального пункта к пункту назначения дополнительно предусмотрено постоянное повторное вычисление предельных значений с использованием обновленной информации о состоянии автомобиля.
Как упоминалось выше, решение указанной задачи изобретения также достигнуто посредством системы автоматического поддержания скорости автомобиля, которая содержит (включая, без ограничения) блок управления для регулирования скорости движения автомобиля, указатель маршрута и водительский интерфейс для взаимодействия с системой автоматического поддержания скорости. Система автоматического поддержания скорости автомобиля отличается тем, что блок служит для выполнения всех шагов любого из пунктов на способ.
Краткое описание чертежей
Настоящее изобретение будет более подробно описано со ссылкой на сопровождающие его чертежи, на которых в качестве примеров показаны дополнительные предпочтительнее варианты осуществления изобретения, а также технические предпосылки, и на которых:
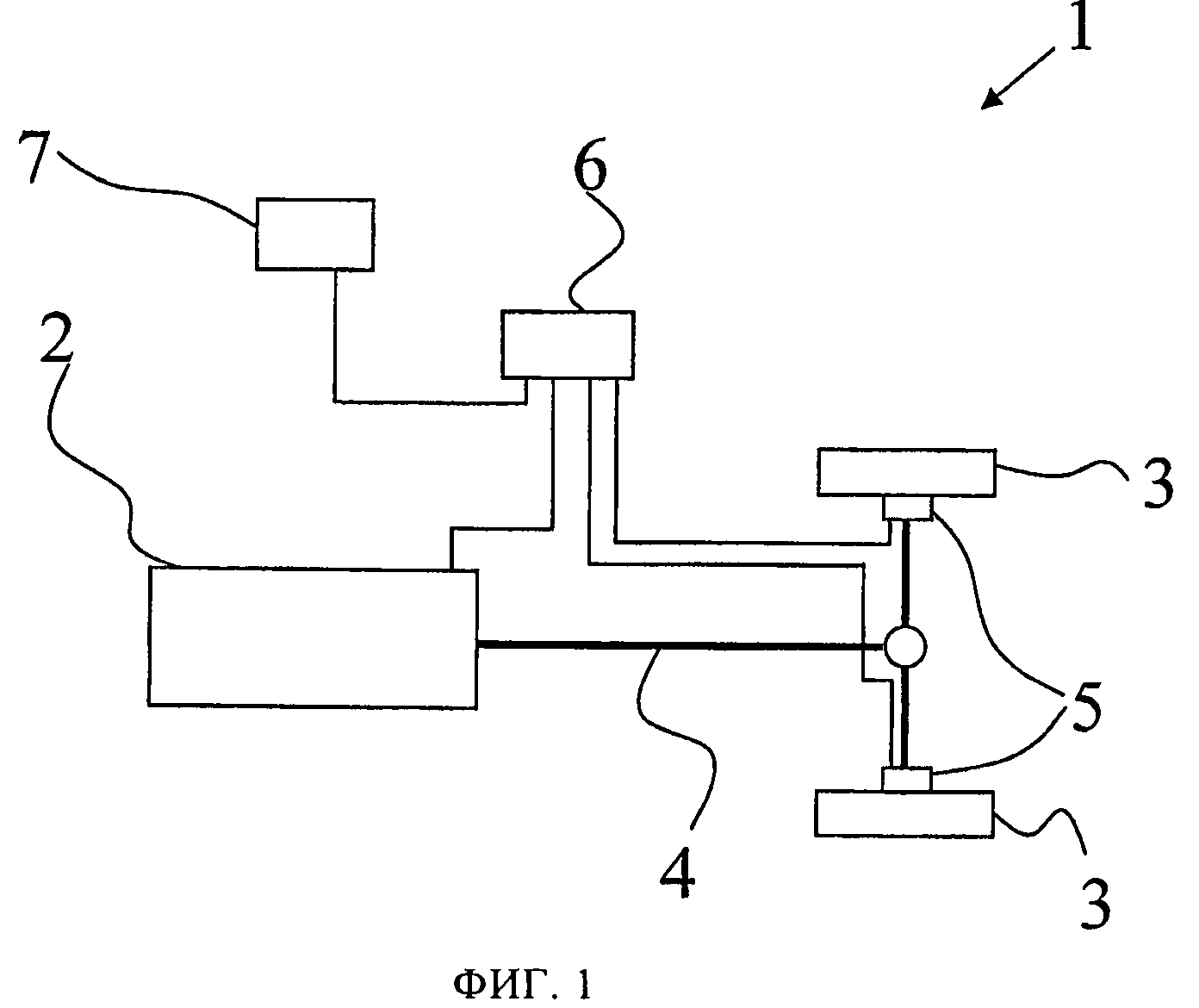
на фиг.1 схематически показан автомобиль, оснащенный системой автоматического поддержания скорости согласно одному из вариантов осуществления изобретения,
на фиг.2 - пример компьютерного обеспечения для осуществления изобретения.
Описание изобретения
На фиг.1 проиллюстрирован автомобиль 1, имеющий двигательный агрегат 2, который может представлять собой двигатель внутреннего сгорания, электродвигатель/генератор или комбинированный агрегат, т.е. последовательный гибридный электромобиль или параллельный гибридный электромобиль или гибридный электромобиль с разделением потока мощности. В проиллюстрированном примере тяговая мощность посредством карданного вала 4 передается на ведомые колеса 3 автомобиля. Двигательный агрегат 2 может иметь механическую или автоматическую трансмиссию, позволяющую выбирать и включать различные передаточные отношения между, например, двигателем внутреннего сгорания и ведомыми колесами 3. С ведомыми колесами 3 соединены рабочие тормоза 5 для торможения автомобиля. Когда в автомобиле приведена в действие функция автоматического поддержания скорости, рабочими тормозами 5 может управлять блок 6 автоматического поддержания скорости, который в этом примере также выполнен с возможностью управления двигательным агрегатом 2 и входящими в него компонентами. Водитель автомобиля может, например, установить скорость движения автомобиля или другие пределы регулирования системы автоматического поддержания скорости посредством водительского интерфейса 7 для взаимодействия с системой автоматического поддержания скорости, который соединен с блоком 6 автоматического поддержания скорости. Двигательный агрегат 2 также может содержать один или несколько вспомогательных тормозов, например, компрессионный тормоз двигателя и гидравлический или электрический замедлитель. Разумеется, что блок автоматического поддержания скорости также может использовать электродвигатель/генератор в качестве тормоза.
В простейшей форме реализации система автоматического поддержания скорости может содержать функции управления, когда для поддержания заданной скорости движения автомобиля регулируется только тяговая мощность, поступающая, например, от двигателя внутреннего сгорания и(или) электродвигателя. В наиболее усовершенствованном варианте осуществления блок автоматического поддержания скорости может быть выполнен с возможностью управления рабочими тормозами, вспомогательными тормозами и двигательными агрегатами или другими функциями автомобиля, которые регулируют скорость движения автомобиля. Помимо упомянутых крайних вариантов осуществления также возможны промежуточные варианты осуществления.
Тяговая мощность также может передаваться на другие, не показанные ведомые колеса автомобиля. Тяговая мощность может передаваться другими способами помимо карданного вала, такими как, например, по электропроводам или посредством гидравлики.
Рабочие тормоза также могут быть выполнены с возможностью торможения других, не показанных ведомых или неведомых колес.
В одном из вариантов осуществления изобретения блок 6 автоматического поддержания скорости запрограммирован на выполнение следующих шагов:
определения начального пункта и пункта назначения для возможного маршрута движения автомобиля,
определения желательного времени нахождения в пути по маршруту движения,
вычисления и установления предельных значений для параметров системы автоматического поддержания скорости с целью прибытия в пункт назначения согласно времени нахождения в пути с минимально возможным расходом топлива.
Блок автоматического поддержания скорости выполнен с возможностью вычисления предельных значения упомянутых параметров в зависимости от желательного времени нахождения в пути по возможному маршруту движения. Преимуществом этого является то, что параметры будут всегда оптимизированы применительно к текущему возможному маршруту движения и желательному времени нахождения в пути по маршруту. Автомобиль будет предположительно прибывать в пункт назначения вовремя и с минимально возможным расходом топлива. Согласно одному из дополнительных вариантов осуществления изобретения упомянутыми параметрами может являться одно или несколько из следующего:
верхний предел ускорения автомобиля,
верхний предел замедления автомобиля,
верхний предел снижения скорости относительно заданной скорости движения автомобиля,
верхний предел превышения скорости относительно заданной скорости движения автомобиля;
максимальный доступный крутящий момент двигателя,
пределы регулирования системы автоматического поддержания скорости, заданная скорость,
ограничение, касающееся момента включения/выключения функции свободного хода.
Блок автоматического поддержания скорости выполнен с возможностью вычислять и выбирать в зависимости от желательного времени нахождения в пути по возможному маршруту движения максимальное допустимое ускорение автомобиля, при котором автомобиль предположительно сможет вовремя прибыть в пункт назначения с минимально возможным расходом топлива. Соответствующее вычисление может осуществляться применительно к другим упомянутым параметрам. Например, если желательное время нахождения в пути является относительно длительным, блоком 6 автоматического поддержания скорости может быть выбрана или предложена более низкая заданная скорость. Такая более низкая заданная скорость может предлагаться и отображаться для водителя на водительском интерфейсе 7 для взаимодействия с системой автоматического поддержания скорости. Затем водитель может согласиться с предложенной заданной скоростью или выбрать другую заданную скорость.
В соответствии с этими же принципами могут вычисляться и выбираться верхний предел замедления автомобиля, верхний предел снижения скорости относительно заданной скорости движения автомобиля, верхний предел превышения скорости относительно заданной скорости движения автомобиля и максимальный доступный крутящий момент двигателя. Водителю могут предлагаться и отображаться все, некоторые или ни один из упомянутых параметров. Таким образом, водитель может выбирать, желает ли он принять предлагаемые параметры. Если параметр не отображается для водителя, блок 6 автоматического поддержания скорости просто принимает выбранное значение конкретного параметра и осуществляет соответствующую регулировку.
Пределы регулирования системы автоматического поддержания скорости могут представлять собой регулируемый коэффициент усиления или другие параметры, которые влияют на агрессивность блока 6 автоматического поддержания скорости (регулятора).
Блок 6 автоматического поддержания скорости также может быть выполнен с возможностью вычислять и предлагать в зависимости от желательного времени нахождения в пути по возможному маршруту движения заданную скорость, которая предположительно позволит автомобилю вовремя прибыть в пункт назначения с минимально возможным расходом топлива. Блок автоматического поддержания скорости может быть выполнен с возможностью предлагать при вычислении заданной скорости информацию об ограничении скорости по маршруту движения во избежание превышения максимально допустимой скорости. Блок автоматического поддержания скорости также может быть запрограммирован не предлагать слишком низкую скорость движения автомобиля, при которой существует риск возникновения дорожного затора из-за слишком медленно движущегося автомобиля.
В заявке WO 02/092378 описана функция свободного хода автоматической ступенчатой трансмиссии. Функцию свободного хода в ней обеспечивается путем установки разъемного зубчатого колеса трансмиссии в нейтральное положение, когда педаль акселератора транспортного средства находится в заданном диапазоне углов поворота, который начинается на определенном расстоянии от исходного положения педали и проходит на протяжении небольшого угла в пределах общего угла поворота педали. Когда водитель желает изменить режим вождения и перейти с привода от двигателя на свободный ход без торможения двигателем, он ослабляет давление на педаль акселератора, чтобы она достигла заданного диапазона, в котором выключается привод от двигателя. Если необходимо торможение двигателем, водитель еще больше ослабляет давление на педаль акселератора до конца или в любом случае до тех пор, пока она не войдет в заданный диапазон, в котором происходит выключение. При применении функции свободного хода согласно заявке WO 02/092378 увеличение скорости движения автомобиля в режиме свободного хода может иногда становится чрезмерным. В этом случае водитель снижает скорость движения автомобиля путем приведения в действие рабочего тормоза и(или) вспомогательного тормоза автомобиля. Эти функциональные возможности свободного хода также могут обеспечиваться системой автоматического поддержания скорости, такой как пояснена со ссылкой на фиг.1. Так, в соответствии с изобретением и упомянутым "касающимся момента включения/выключения функции свободного хода ограничением" блок автоматического поддержания скорости может быть запрограммирован регулировать, например: предельную скорость, предельный уклон дороги, предельные замедление и ускорение, связанные с управлением включением/выключением режима свободного хода с учетом желательного времени нахождения в пути и возможного маршрута движения. Например, при длительном времени в пути блок автоматического поддержания скорости может быть запрограммирован на включение режима свободного хода при более низкой скорости (по сравнению с заданной скоростью), чем в случае более короткого желательного времени нахождения в пути. Так, за счет адаптации функциональных возможностей свободного хода (если они доступны в автомобиле) можно дополнительно расширять возможности экономии топлива, когда желательное время нахождения в пути является относительно продолжительным.
Если предельные значения вычисляются и выбираются для двух или более из упомянутых параметров, вычисление может производиться с учетом сравнительного взвешивания двух или более различных параметров. Например, параметры, которые больше всего влияют на расход топлива, могут регулироваться в последнюю очередь и вообще не регулироваться, если желательное время нахождения в пути является относительно коротким. С другой стороны, если время в пути от начального пункта до пункта назначения является длительным, вероятно, что его будет достаточно для регулирования предельных значений всех доступных параметров, которые влияют на расход топлива.
В одном из дополнительных вариантов осуществления изобретения блок автоматического поддержания скорости может быть запрограммирован на повторное вычисление упомянутых предельных значений для параметров, если во время движения от начального пункта к пункту назначения произошло непредвиденное событие, и это событие влияет на среднюю скорость движения автомобиля. Если средняя скорость движения автомобиля снижается, например, из-за непредвиденной остановки автомобиля, блок автоматического поддержания скорости повторно вычислит предельные значения, чтобы обеспечить прибытие автомобиля в пункт назначения в расчетное время.
Если автомобиль оснащен автоматической трансмиссией для выбора различных передаточных отношений между двигательным агрегатом и ведомыми колесами, согласно одному из дополнительных вариантов осуществления изобретения блок автоматического поддержания скорости может быть запрограммирован на выбор схемы переключения передач, которая согласно расчетам обеспечивает наименьший расход топлива по маршруту движения. Определение такой схемы переключения передач осуществляется в связи с шагом вычисления и установления предельных значений. При этом учитывается желательное время нахождения в пути. Этим способом с учетом маршрута движения и желательного времени нахождения в пути также может регулироваться трансмиссия автомобиля. В одном из дополнительных вариантов осуществления изобретения блок автоматического поддержания скорости может быть запрограммирован на совершение нового выбора схемы переключения передач, которая согласно расчетам обеспечивает наименьший расход топлива, если во время движения от начального пункта к пункту назначения произошло непредвиденное событие, и это событие влияет на среднюю скорость движения автомобиля. Если средняя скорость движения автомобиля снижается, например, из-за непредвиденной остановки автомобиля, блок автоматического поддержания скорости определяет и выбирает скорректированную схему переключения передач (по сравнению с ранее принятой схемой переключения передач), чтобы обеспечить прибытие автомобиля в пункт назначения в расчетное время. Например, если во время остановки автомобиля было потеряно много времени, частота вращения двигателя, при которой трансмиссия переходит на более высокую передачу, может быть увеличена до более высокой частоты вращения.
В одном из дополнительных вариантов осуществления в связи с упомянутым шагом вычисления и установления предельных значений и с учетом желательного времени нахождения в пути блок автоматического поддержания скорости может быть запрограммирован на выбор одного из двух или более возможных маршрутов движения от начального пункта к пункту назначения, который согласно расчетам обеспечивает наименьший расход топлива. Например, при наличии двух возможных маршрутов достижения пункта назначения приблизительно в одно то же время блок автоматического поддержания скорости может быть запрограммирован на выбор того маршрута, который по расчетам обеспечивает наименьший расход топлива. Блок автоматического поддержания скорости может быть запрограммирован на учет топографии возможных маршрутов и(или), если это доступно, интенсивности движения и(или) числа светофоров и т.д. Разумеется, если время в пути является достаточно коротким, выбирается маршрут движения, который по расчетам является самым быстрым.
В одном из дополнительных вариантов осуществления изобретения блок автоматического поддержания скорости может быть запрограммирован на пересмотр выбора маршрута, если произошло непредвиденное событие, которое влияет на среднюю скорость движения автомобиля, при этом упомянутый пересмотр осуществляется, исходя из текущего положения автомобиля в качестве начального пункта. Разумеется, при отсутствии другого возможного маршрута для выбора пересмотр выбора маршрута не осуществляется.
Во всех из ранее упомянутых вариантов осуществления блок автоматического поддержания скорости может быть запрограммирован на определение и предложение первого времени нахождения в пути, исходя из начального пункта, пункта назначения и средней скорости движения автомобиля по маршруту. Это может делаться до шаги определения желательного времени нахождения в пути. Это предлагаемое первое время нахождения в пути может отображаться для водителя посредством водительского интерфейса 7 для взаимодействия с системой автоматического поддержания скорости, и водитель может принимать предлагаемое первое время нахождения в пути или отклонять и корректировать его.
В другом варианте осуществления изобретения блок автоматического поддержания скорости может быть запрограммирован осуществлять постоянное повторное вычисление предельных значений параметров с использованием обновленной информации о состоянии автомобиля во время движения от начального пункта к пункту назначения.
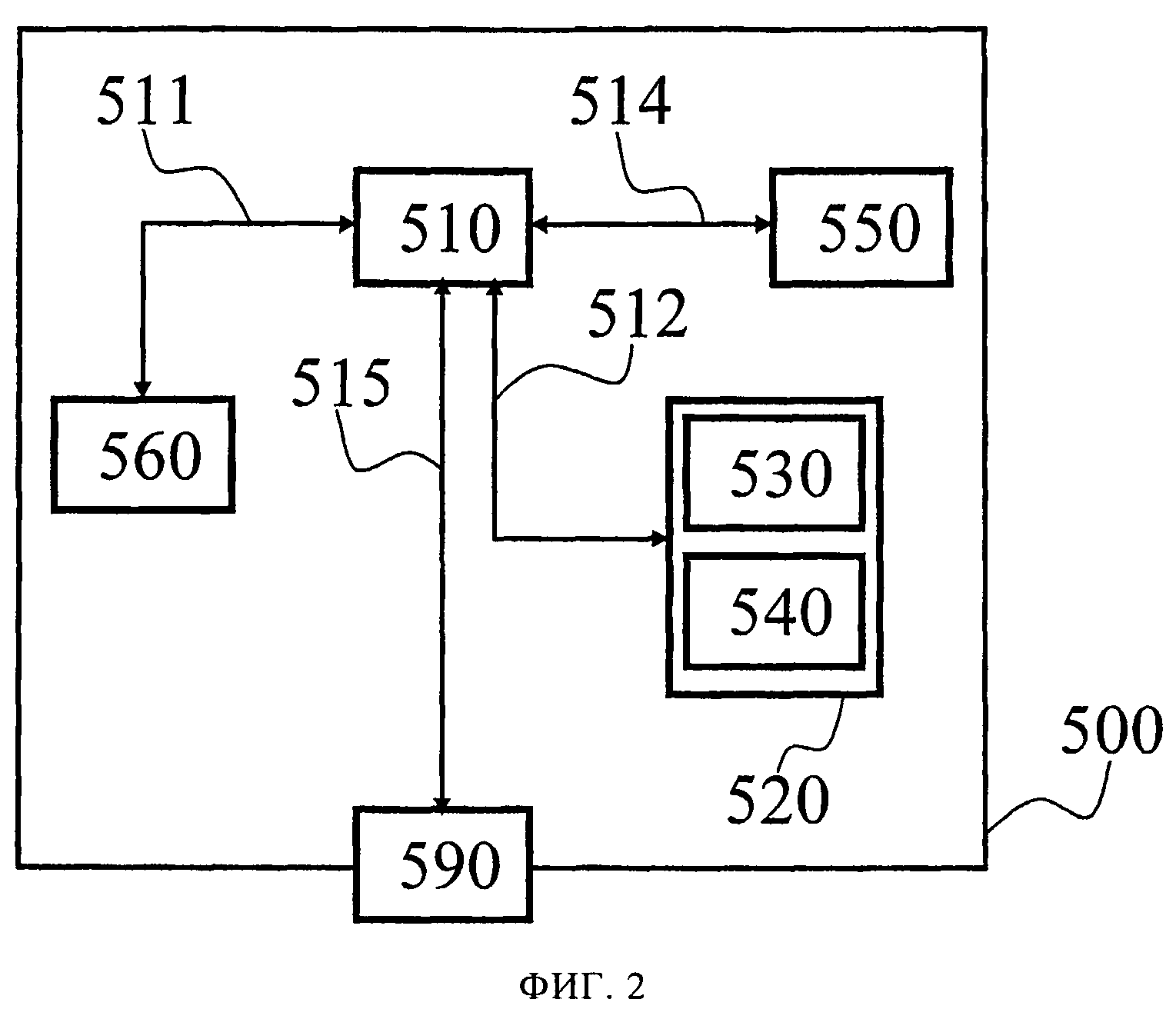
На фиг.2 показано устройство 500 согласно одному из вариантов осуществления изобретения, содержащее энергонезависимую память 520, процессор 510 и память 560 с оперативной записью и считыванием. Память 520 имеет первую область 530, в которой хранится компьютерная программа для управления устройством 500. Компьютерной программой для управления устройством 500, хранящейся в области 530 памяти, может являться операционная система.
Устройство 500 может помещаться, например, в блоке управления, таком как блок 6 автоматического поддержания скорости. Блоком 510 обработки данных может являться, например, микрокомпьютер.
Память 520 также имеет вторую область 540, в которой хранится программа управления функцией выбора целевых передач согласно изобретению. В одном из альтернативных вариантов осуществления программа управления функцией выбора целевых передач хранится в отдельной энергонезависимой запоминающей среде (средстве) 550, такой как, например, компакт-диск или полупроводниковая память со сменными дисками. Программа может храниться в выполнимой форме или в сжатом виде.
Когда далее указано, что блок 510 обработки данных выполняет конкретную функцию, должно быть ясно, что блок 510 обработки данных выполняет конкретную часть программы, хранящейся в памяти 540, или конкретную часть программы, хранящейся энергонезависимой среде 550 для записи.
Блок 510 обработки данных рассчитан на обмен данными с памятью 550 посредством шины 514 данных. Блок 510 обработки данных также рассчитан на обмен данными с памятью 520 посредством шины 512 данных. Кроме того, блок 510 обработки данных рассчитан на обмен данными с памятью 560 посредством шины 511 данных. Блок 510 обработки данных также рассчитан на обмен данными с портом 590 данных путем использования шины 515 данных.
Предложенный в настоящем изобретении способ может быть осуществлен блоком 510 обработки данных, который выполняет программу, хранящуюся в памяти 540, или программу, хранящуюся в энергонезависимой среде 550 для записи.
Изобретение не следует считать ограниченным описанными выше вариантами осуществления, и предполагается ряд дополнительных вариантов и усовершенствований, входящих в объем следующей далее формулы изобретения.
Реферат
Группа изобретений относится к способу и системе управления автоматическим поддержанием скорости автомобиля. Способ управления заключается в том, что определяют начальный пункт и пункт назначения возможного маршрута движения, определяют желательное время нахождения в пути по маршруту движения, вычисляют и устанавливают предельные значения для параметров системы автоматического поддержания скорости. Повторно вычисляют и устанавливают предельные значения, если во время движения от начального пункта к пункту назначения произошло непредвиденное событие, которое влияет на среднюю скорость движения транспортного средства. Осуществляют выбор схемы переключения передач, которая согласно расчетам обеспечивает наименьший расход топлива. Система содержит блок управления для регулирования скорости движения транспортного средства, указатель маршрута, водительский интерфейс. Блок управления выполнен с возможностью выполнения операций вышеуказанного способа. Технический результат заключается в снижении расхода топлива. 2 н. и 6 з.п. ф-лы, 2 ил.
Комментарии