Устройство для прогнозирования энергопотребления и способ для прогнозирования энергопотребления - RU2639713C2
Код документа: RU2639713C2
Чертежи











Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству для прогнозирования энергопотребления и к способу для прогнозирования энергопотребления.
Данная заявка притязает на приоритет на основе заявки на патент Японии № 2013-082823, поданной 11 апреля 2013 года. Содержимое вышеуказанной заявки содержится в данном документе по ссылке в обозначенных странах, в которых признается включение по ссылке.
Уровень техники
[0002] В качестве предшествующего уровня техники, известно устройство для прогнозирования расхода топлива на основе скорости транспортного средства, ускорения и сопротивления воздуха, вызываемого, когда транспортное средство фактически движется (см. патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP 2011-506873 A
Сущность изобретения
Задачи, решаемые изобретением
[0004] В предшествующем уровне техники, энергопотребление в текущий момент времени прогнозируется, к примеру, на основе скорости транспортного средства и ускорения, полученного, когда транспортное средство фактически движется. Тем не менее, невозможно прогнозировать энергопотребление по запланированному маршруту движения до того, как транспортное средство начинает движение.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставить устройство для прогнозирования энергопотребления, которое может надлежащим образом прогнозировать энергопотребление.
Средство решения задач
[0006] Изобретение разрешает проблему так, как пояснено ниже. Сопротивление воздуха, вызываемое, когда транспортное средство движется по запланированному маршруту движения, вычисляется посредством использования формулы вычисления сопротивления воздуха на основе информации скорости движения, заданной для каждого маршрута. Вычисленное сопротивление воздуха корректируется таким образом, что сопротивление воздуха повышается по мере того, как скорость движения по запланированному маршруту движения уменьшается. Энергопотребление по запланированному маршруту движения прогнозируется на основе скорректированного сопротивления воздуха.
Преимущества изобретения
[0007] Согласно настоящему изобретению, сопротивление воздуха, вызываемое, когда транспортное средство движется по запланированному маршруту движения, вычисляется на основе информации скорости движения, заданной для каждого маршрута. Соответственно, можно прогнозировать энергопотребление по запланированному маршруту движения. В частности, согласно настоящему изобретению, сопротивление воздуха, вычисленное посредством формулы вычисления сопротивления воздуха, корректируется с учетом такой тенденции, что частота ускорения повышается по мере того, как скорость движения по запланированному маршруту движения понижается. Соответственно, можно с высокой точностью прогнозировать сопротивление воздуха, вызываемое, когда транспортное средство движется по маршруту движения. Как результат, можно надлежащим образом прогнозировать энергопотребление по запланированному маршруту движения на основе скорректированного сопротивления воздуха.
Краткое описание чертежей
[0008] Фиг. 1 является схемой конфигурации навигационного устройства согласно варианту осуществления настоящего изобретения;
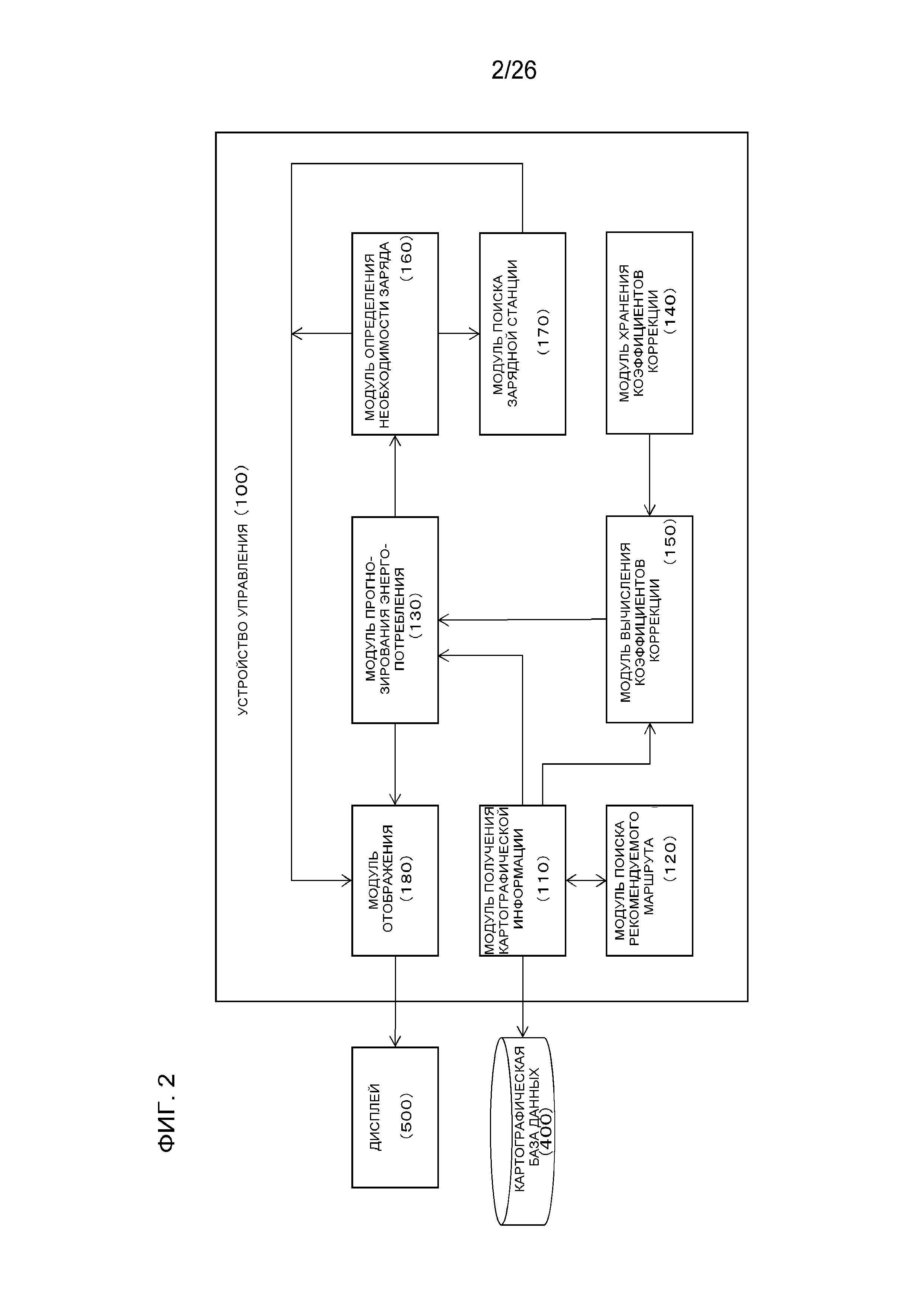
Фиг. 2 является функциональной блок-схемой устройства управления согласно первому варианту осуществления;
Фиг. 3 является графиком, иллюстрирующим пример интегрального значения фактического сопротивления воздуха на предварительно определенном участке движения и интегрального значения сопротивления воздуха, прогнозированного на основе следующей формулы (2);
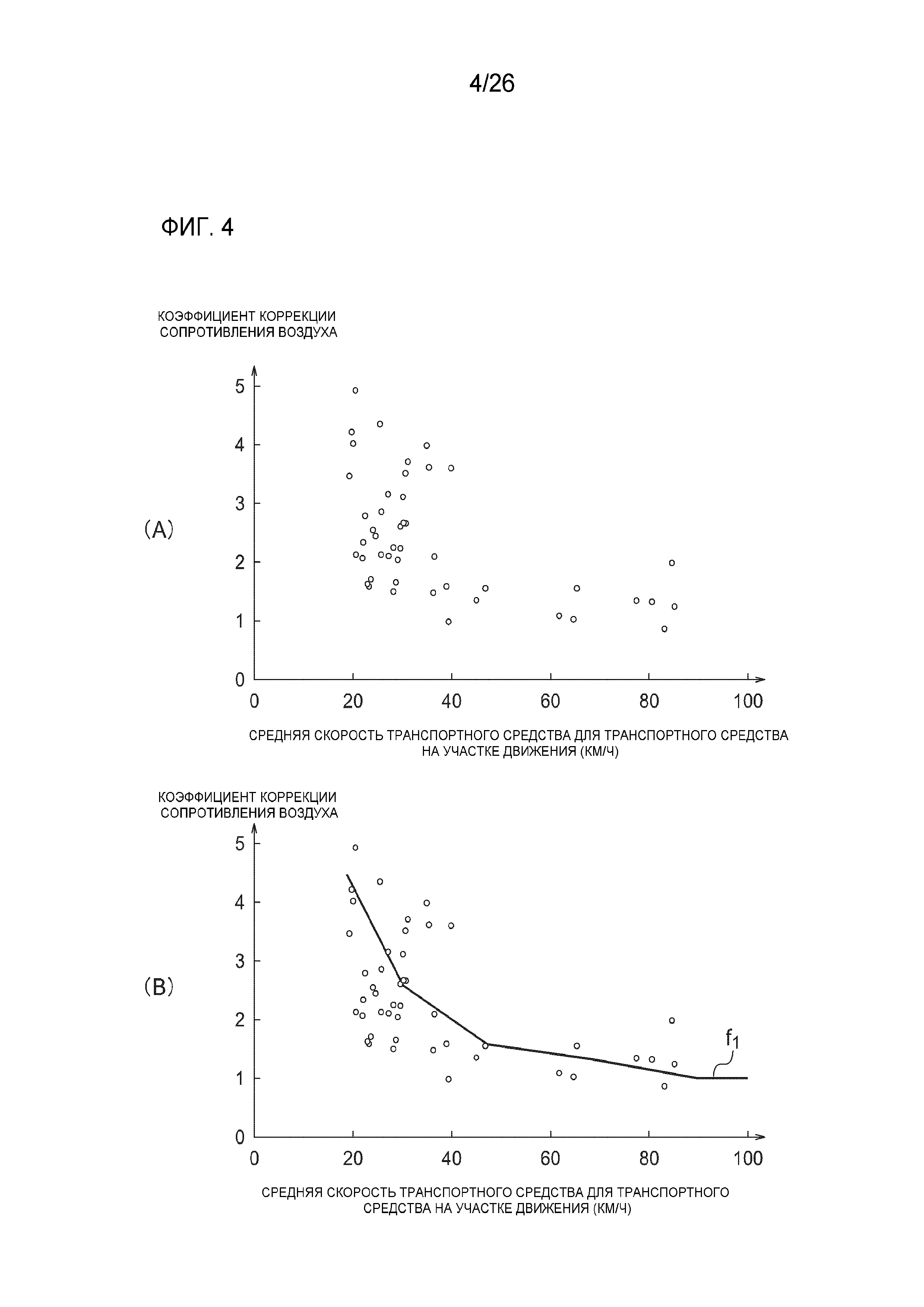
Фиг. 4(A) является схемой, иллюстрирующей пример значений эксперимента по коэффициентам сопротивления воздуха;
Фиг. 4(B) является схемой, иллюстрирующей пример функции вычисления сопротивления воздуха;
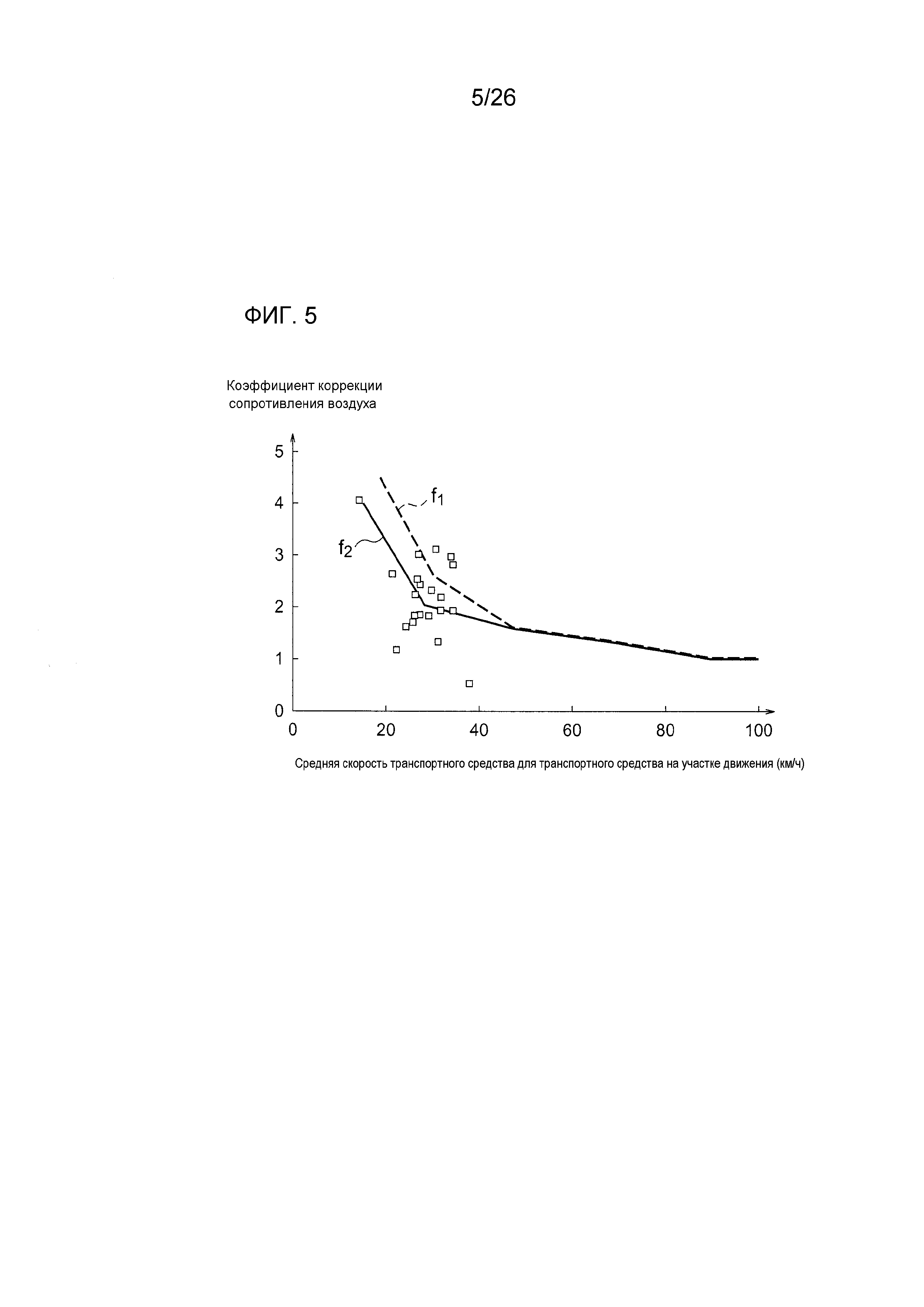
Фиг. 5 является схемой, иллюстрирующей пример функции коррекции сопротивления воздуха, когда участок движения является наклонным;
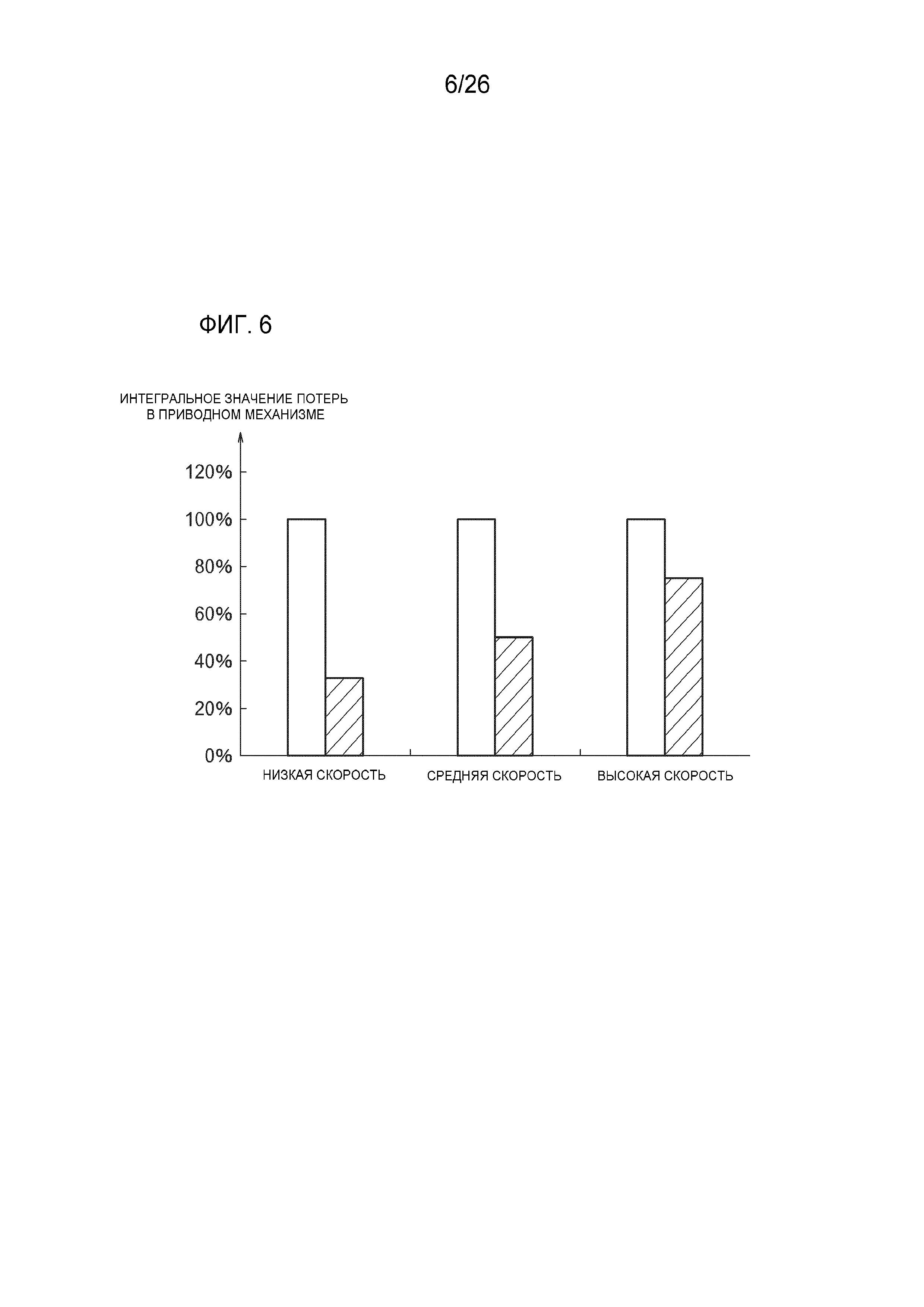
Фиг. 6 является графиком, иллюстрирующим пример интегрального значения фактических потерь в приводном механизме на предварительно определенном участке движения и интегрального значения потерь в приводном механизме, прогнозированного на основе следующей формулы (3);
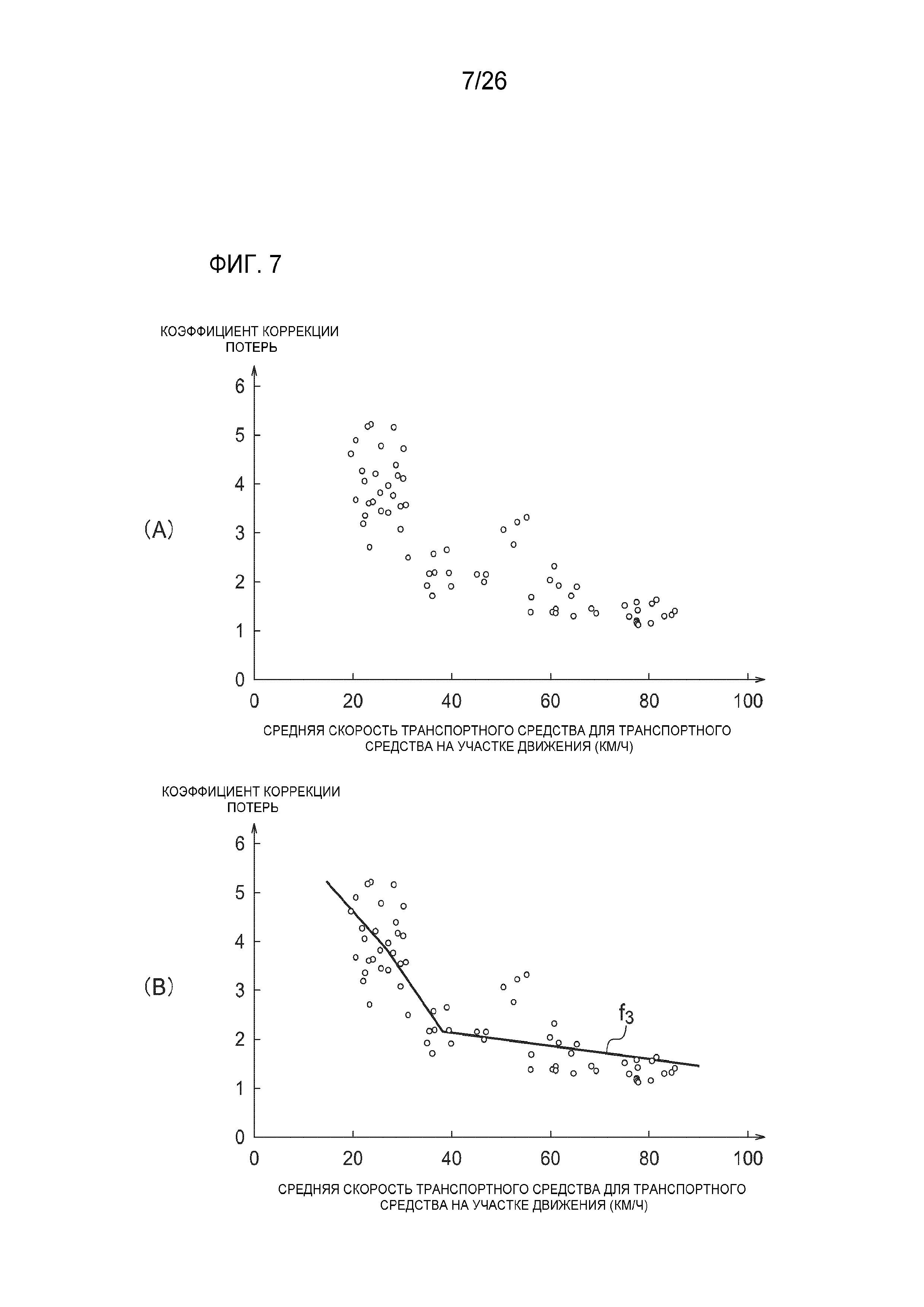
Фиг. 7(A) является схемой, иллюстрирующей пример значений эксперимента по коэффициентам потерь;
Фиг. 7(B) является схемой, иллюстрирующей пример функции вычисления потерь;
Фиг. 8 является схемой, иллюстрирующей пример коэффициентов коррекции потерь, когда участок движения является наклонным;
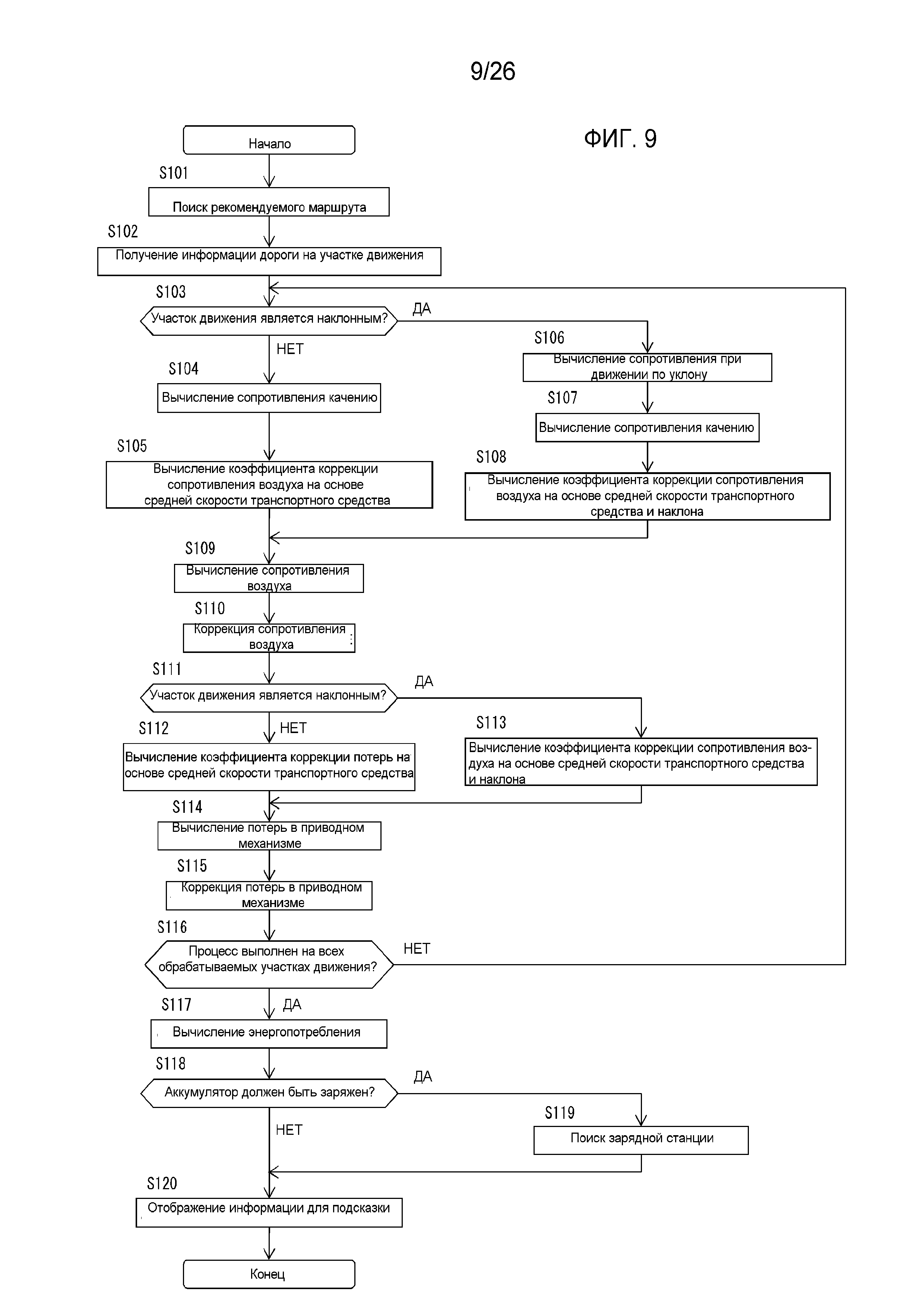
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей процесс для прогнозирования энергопотребления согласно первому варианту осуществления;
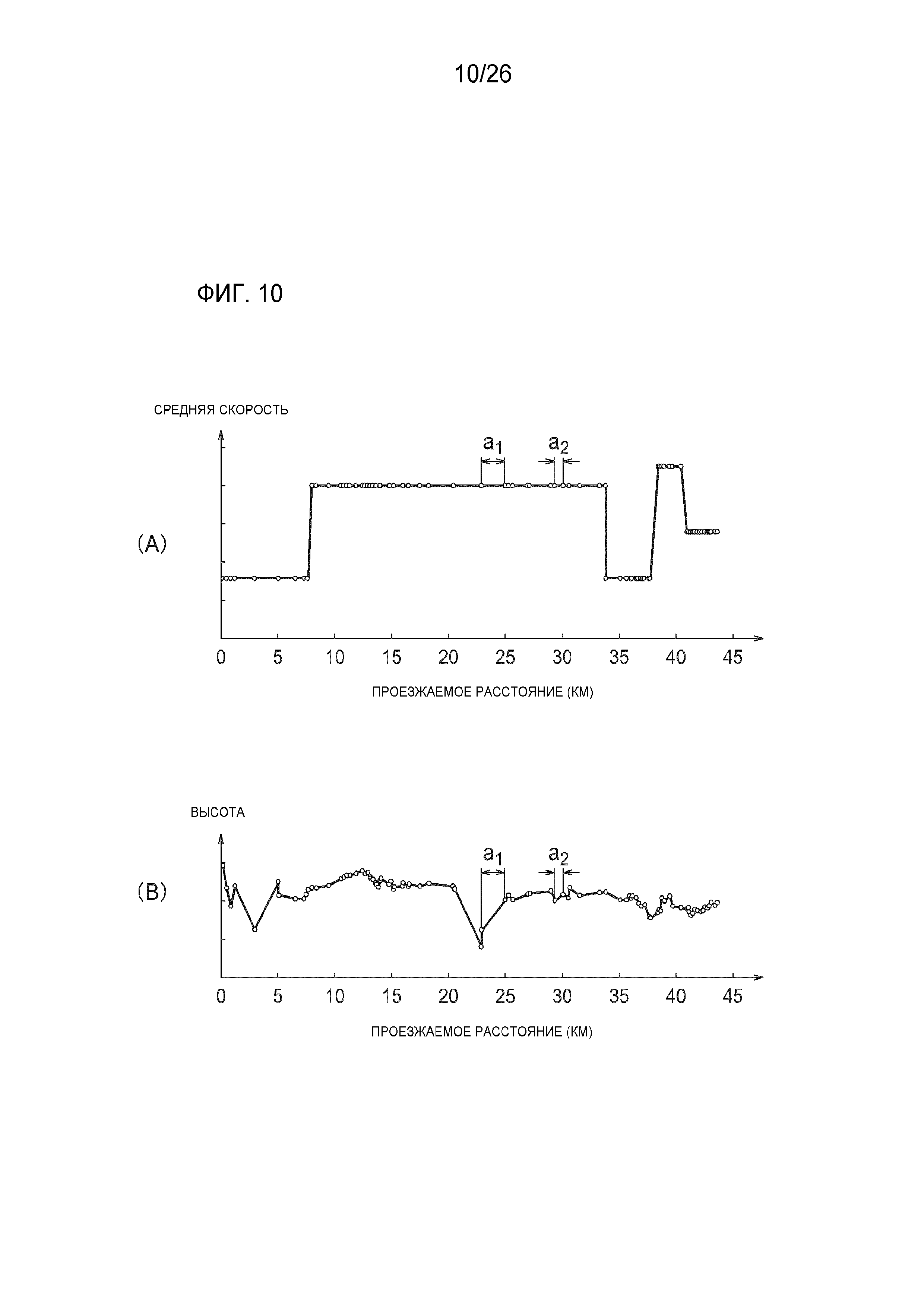
Фиг. 10(A) является схемой, иллюстрирующей пример средней скорости транспортного средства на каждом участке движения рекомендуемого маршрута;
Фиг. 10(B) является схемой, иллюстрирующей пример высоты каждого участка движения рекомендуемого маршрута;
Фиг. 11 является графиком, иллюстрирующим пример временного перехода фактической скорости транспортного средства, средней скорости транспортного средства, интегрального значения фактического сопротивления воздуха, интегрального значения сопротивления воздуха, прогнозированного на основе следующей формулы (2), и интегрального значения сопротивления воздуха, прогнозированного на основе следующей формулы (10), на предварительно определенном участке движения;
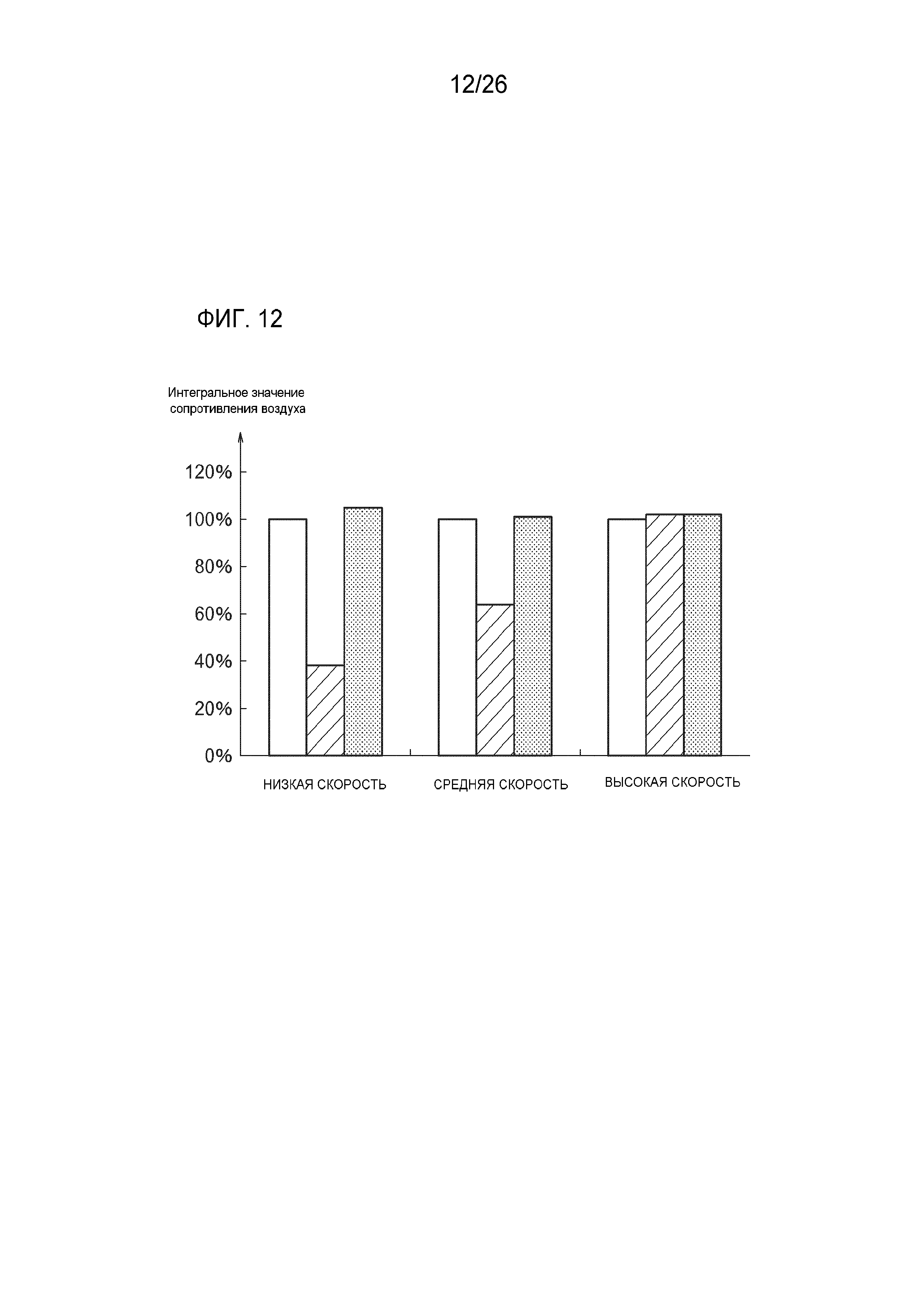
Фиг. 12 является графиком, иллюстрирующим пример интегрального значения фактического сопротивления воздуха, интегрального значения сопротивления воздуха, прогнозированного на основе следующей формулы (2), и интегрального значения сопротивления воздуха, прогнозированного на основе следующей формулы (10), на предварительно определенном участке движения;
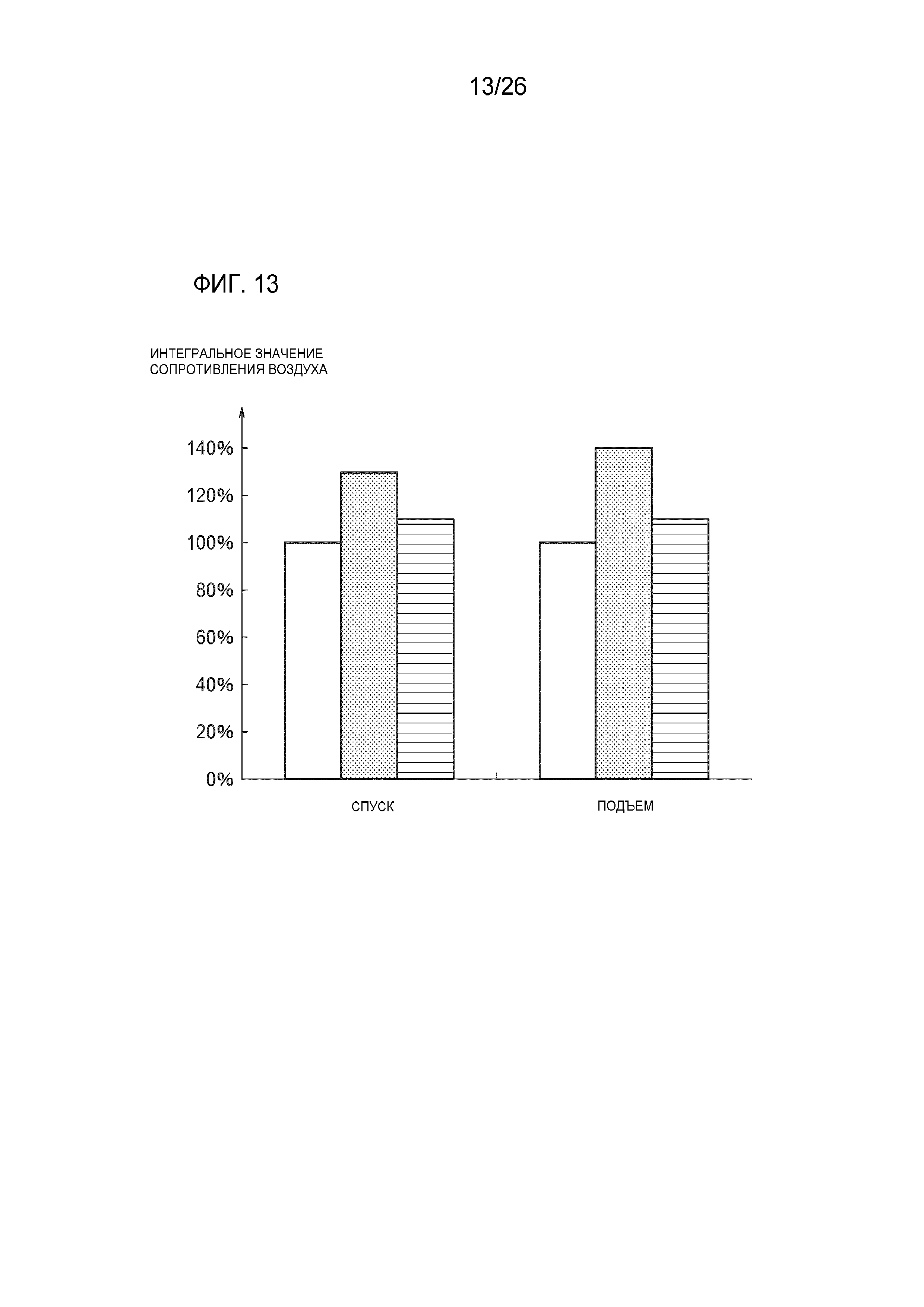
Фиг. 13 является графиком, иллюстрирующим пример интегрального значения фактического сопротивления воздуха, когда участок движения является наклонным, интегрального значения сопротивления воздуха, прогнозированного посредством использования коэффициента α коррекции сопротивления воздуха, когда участок движения является плоским, и интегрального значения сопротивления воздуха, прогнозированного посредством использования коэффициента α коррекции сопротивления воздуха, когда участок движения является наклонным;
Фиг. 14 является графиком, иллюстрирующим пример временного перехода фактической скорости транспортного средства, средней скорости транспортного средства и интегрального значения фактических потерь в приводном механизме, интегрального значения потерь в приводном механизме, прогнозированного на основе следующей формулы (3), и интегрального значения потерь в приводном механизме, прогнозированного на основе формулы (14), на предварительно определенном участке движения;
Фиг. 15 является графиком, иллюстрирующим пример интегрального значения фактических потерь в приводном механизме, интегрального значения потерь в приводном механизме, прогнозированного на основе следующей формулы (3), и интегрального значения потерь в приводном механизме, прогнозированного на основе следующей формулы (14), на предварительно определенном участке движения;
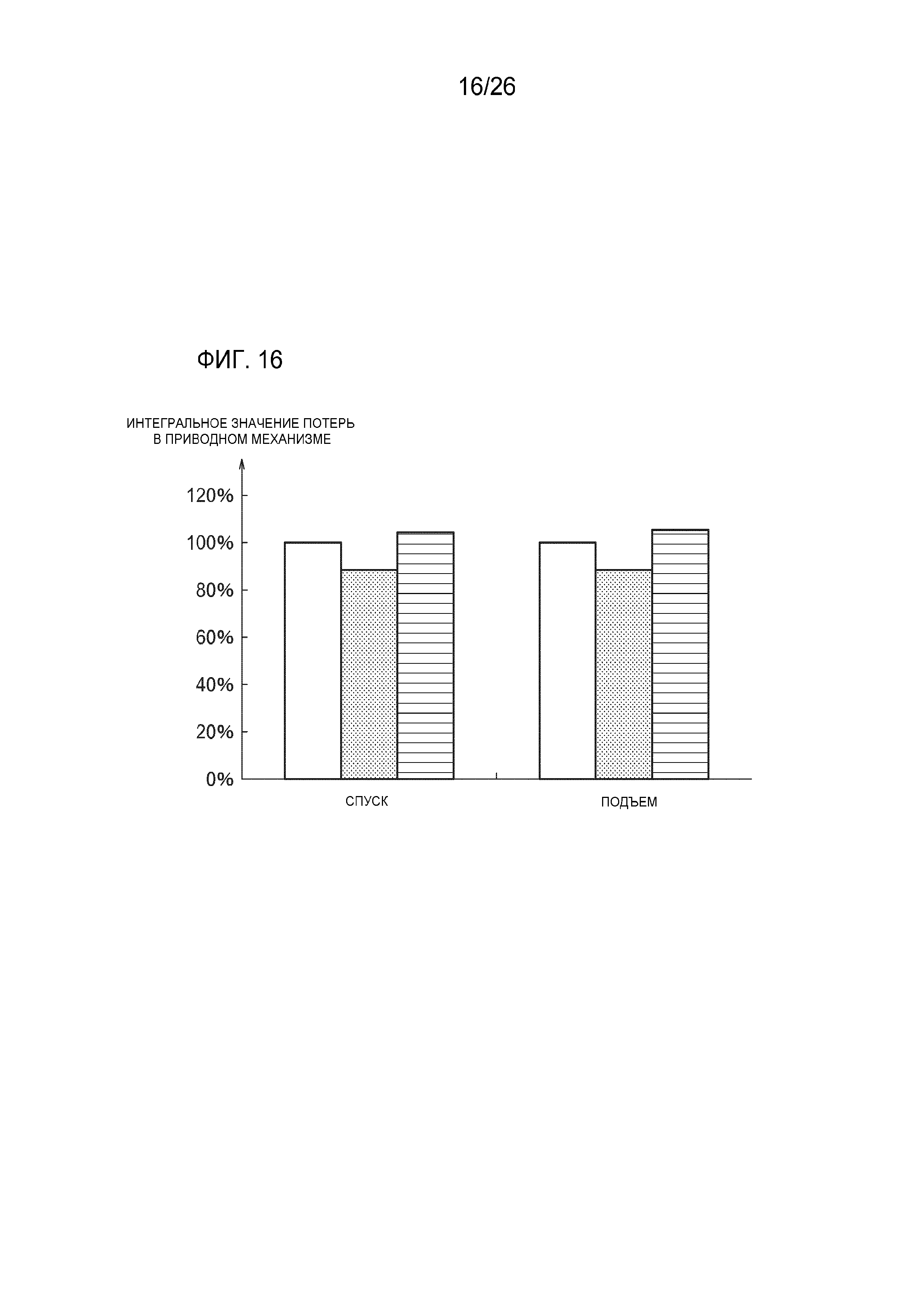
Фиг. 16 является графиком, иллюстрирующим пример интегрального значения фактических потерь в приводном механизме, когда участок движения является наклонным, интегрального значения потерь в приводном механизме, прогнозированного посредством использования коэффициента β коррекции потерь, когда участок движения является плоским, и интегрального значения потерь в приводном механизме, прогнозированного посредством использования коэффициента β коррекции потерь, когда участок движения является наклонным;
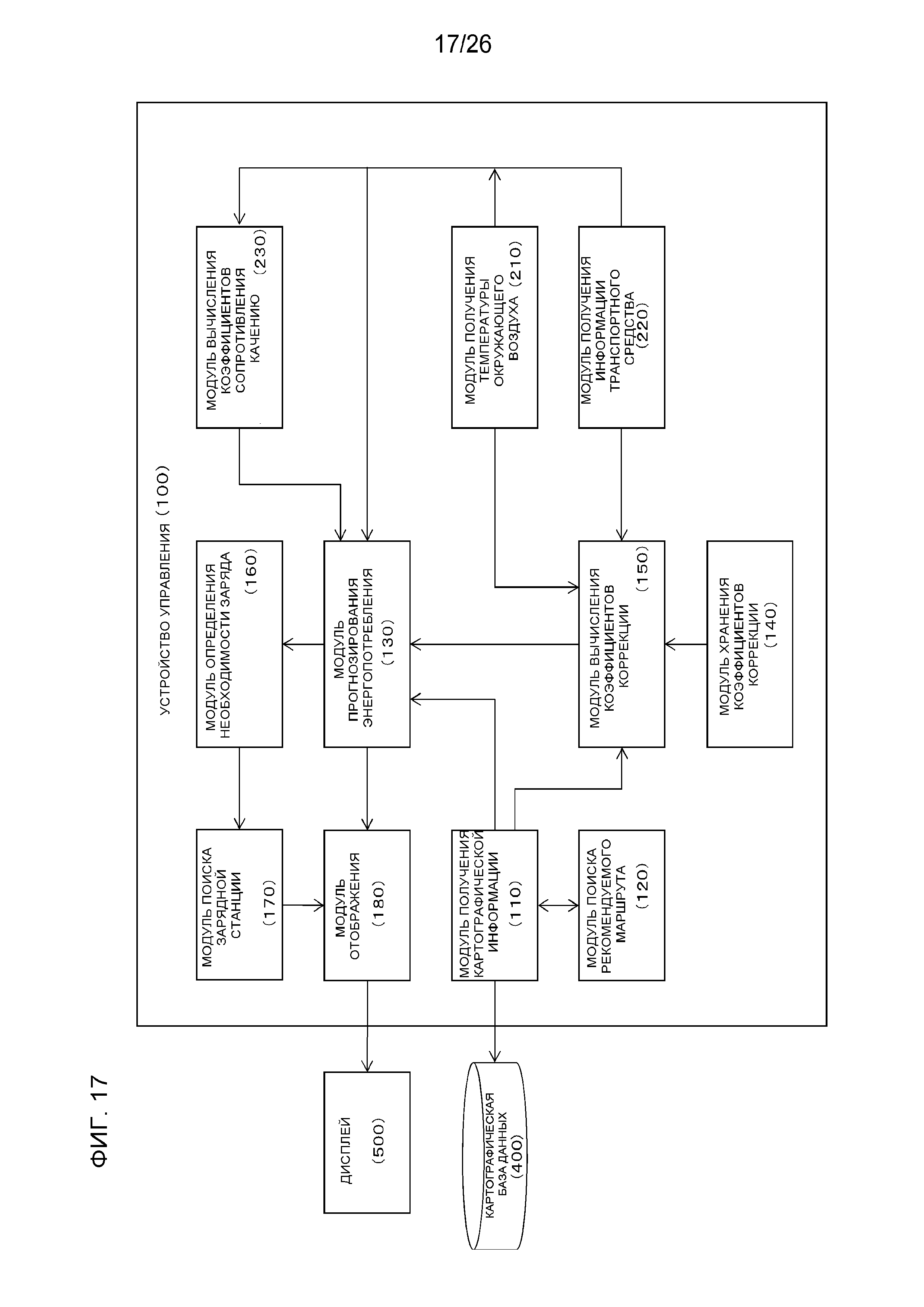
Фиг. 17 является функциональной блок-схемой устройства управления согласно второму варианту осуществления;
Фиг. 18 является схемой, иллюстрирующей пример корреляции температуры окружающего воздуха и коэффициента сопротивления качению;
Фиг. 19 является графиком, иллюстрирующим пример корреляции сопротивления качению, средней скорости транспортного средства и коэффициента коррекции потерь;
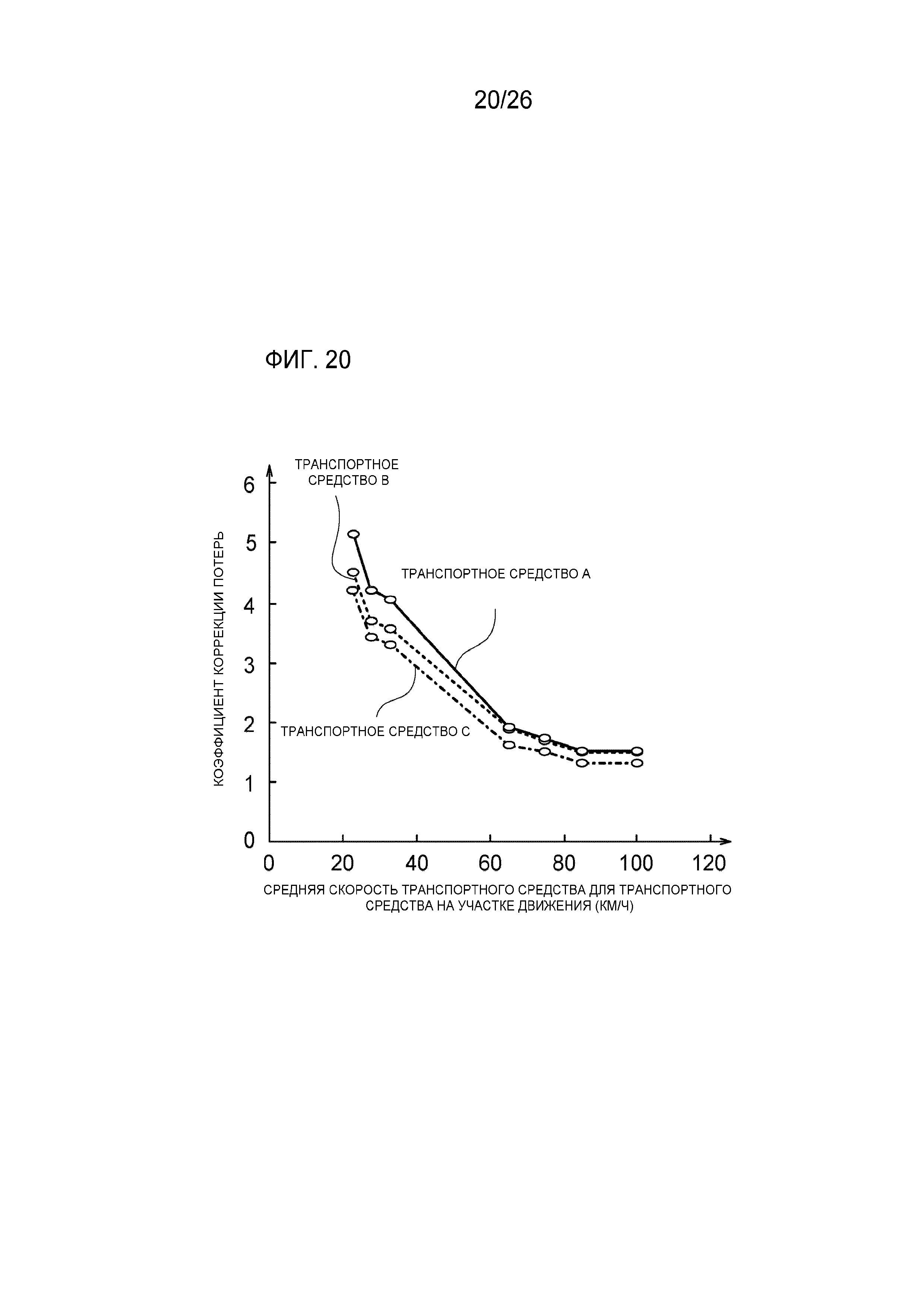
Фиг. 20 является схемой, иллюстрирующей пример коэффициента коррекции потерь каждого типа транспортных средств;
Фиг. 21 является первой блок-схемой последовательности операций способа, иллюстрирующей процесс для прогнозирования энергопотребления согласно второму варианту осуществления;
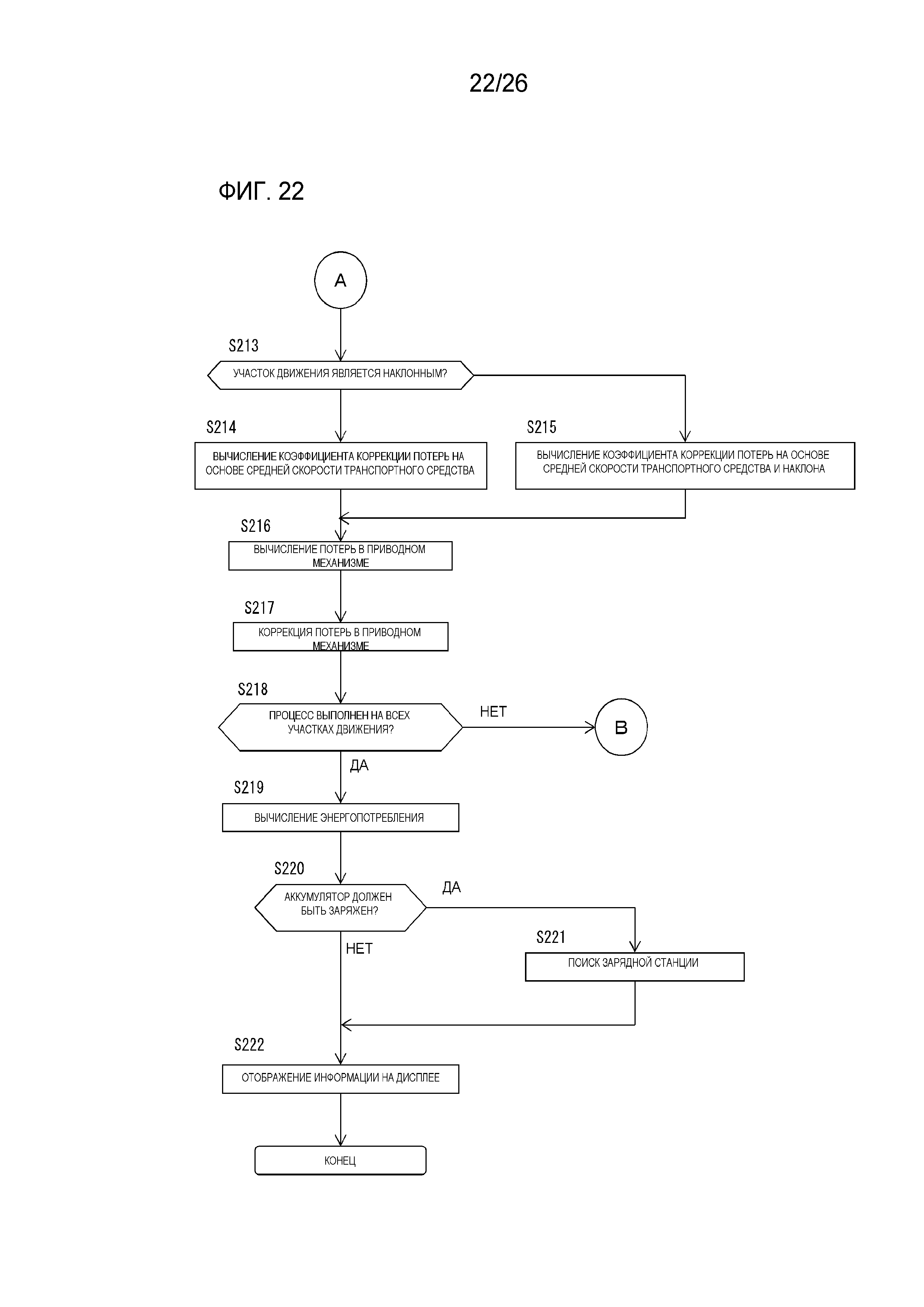
Фиг. 22 является второй блок-схемой последовательности операций способа, иллюстрирующей процесс для прогнозирования энергопотребления согласно второму варианту осуществления;
Фиг. 23 является схемой, иллюстрирующей пример фактического энергопотребления и энергопотребления, прогнозированного независимо от температуры окружающего воздуха;
Фиг. 24 является схемой, иллюстрирующей пример фактического энергопотребления и энергопотребления, прогнозированного с учетом температуры окружающего воздуха;
Фиг. 25 является схемой, иллюстрирующей пример прогнозированного значения температуры окружающего воздуха; и
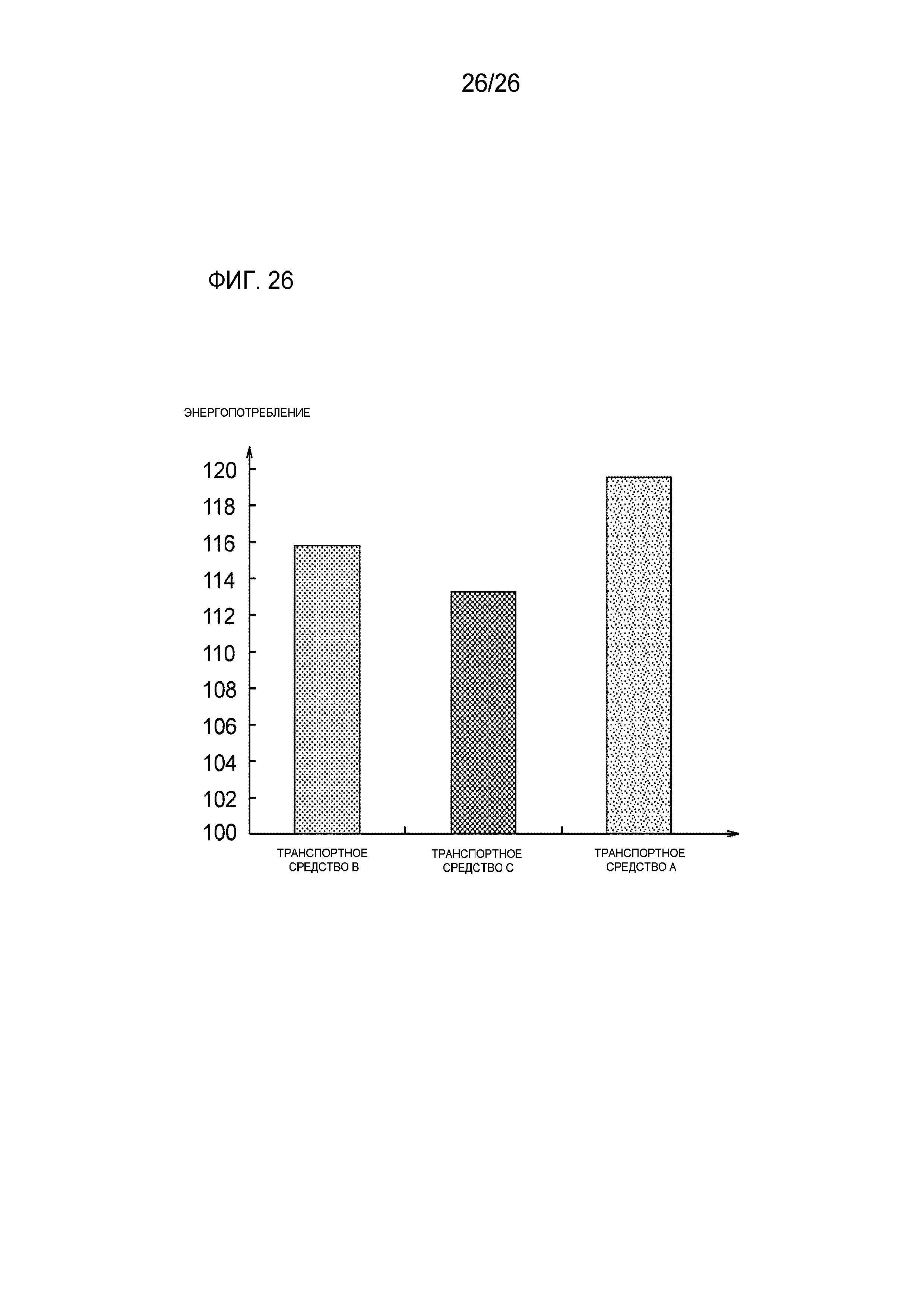
Фиг. 26 является графиком, иллюстрирующим пример энергопотребления каждого типа транспортных средств.
Оптимальный режим осуществления изобретения
[0009] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи. Дополнительно, ниже описываются варианты осуществления настоящего изобретения посредством иллюстрации навигационного устройства, смонтированного на электромобиле.
[0010] Первый вариант осуществления
Фиг. 1 является схемой конфигурации навигационного устройства 1 согласно настоящему варианту осуществления. Навигационное устройство 1 прогнозирует энергопотребление от текущей позиции до пункта назначения. Навигационное устройство 1 определяет то, может или нет транспортное средство достигать пункта назначения из текущей позиции, посредством оставшейся величины текущей энергии аккумулятора на основе прогнозного энергопотребления. Навигационное устройство 1 включает в себя устройство 200 ввода, выполненное с возможностью вводить пункт назначения, устройство 300 определения позиции рассматриваемого транспортного средства, выполненное с возможностью определять текущую позицию рассматриваемого транспортного средства, картографическую базу 400 данных, выполненную с возможностью сохранять картографическую информацию, включающую в себя информацию дороги, устройство 100 управления, выполненное с возможностью прогнозировать энергопотребление до пункта назначения, и дисплей 500, выполненный с возможностью подсказывать результат прогнозирования пассажиру. В дальнейшем в этом документе подробно описываются конфигурации.
[0011] Устройство 200 ввода представляет собой, например, такое устройство, ка сенсорная панель, расположенная на экране отображения, используемая для того, чтобы вводить инструкцию пользователя посредством руки пользователя, либо микрофон, используемый для того, чтобы вводить речь пользователя. Информация, которая вводится посредством устройства 200 ввода, передается в устройство 100 управления.
[0012] Устройство 300 определения позиции рассматриваемого транспортного средства включает в себя модуль GPS (глобальной системы позиционирования), гиродатчик и датчик скорости транспортного средства. Устройство 300 определения позиции рассматриваемого транспортного средства определяет радиоволны, передаваемые из спутников связи, и периодически получает информацию позиции рассматриваемого транспортного средства. Дополнительно, устройство 300 определения позиции рассматриваемого транспортного средства определяет текущую позицию рассматриваемого транспортного средства на основе информации позиции рассматриваемого транспортного средства, информации изменения угла, полученной из гиродатчика, и скорости транспортного средства, полученной из датчика скорости транспортного средства. Информация позиции рассматриваемого транспортного средства, определенной посредством устройства 300 определения позиции рассматриваемого транспортного средства, передается в устройство 100 управления.
[0013] Картографическая база 400 данных сохраняет картографическую информацию, включающую в себя информацию дороги. В частности, картографическая база 400 данных сохраняет информацию дороги, включающую в себя проезжаемое расстояние, высоту, наклон и среднюю скорость транспортного средства на каждом участке движения, таком как соединение дорог. Средняя скорость транспортного средства на участке движения является средним значением информации скорости транспортного средства, собранной из транспортных средств, фактически движущихся на участке движения. Картографическая информация, сохраненная в картографической базе 400 данных, используется для устройства 100 управления, с тем чтобы прогнозировать энергопотребление от текущей позиции до пункта назначения.
[0014] Дисплей 500 отображает информацию, передаваемую из устройства 100 управления, на экране дисплея 500. Информация, которая отображается посредством дисплея 500, включает в себя карту около рассматриваемого транспортного средства и рекомендуемый маршрут от текущей позиции до пункта назначения. Помимо этого, информация включает в себя энергопотребление от текущей позиции до пункта назначения, информацию, используемую для того, чтобы определять то, требуется или нет заряд аккумулятора, и позиции зарядных станций для аккумулятора.
[0015] Устройство 100 управления включает в себя ROM (постоянное запоминающее устройство), выполненное с возможностью сохранять программу для прогнозирования энергопотребления от текущей позиции до пункта назначения, CPU (центральный процессор), сконфигурированный в качестве функциональной схемы для выполнения программы, сохраненной в ROM, и RAM (оперативное запоминающее устройство), сконфигурированное в качестве доступного устройства хранения данных. Дополнительно, MPU (микропроцессор), DSP (процессор цифровых сигналов), ASIC (специализированная интегральная схема), FPGA (программируемая пользователем вентильная матрица) и т.п. могут использоваться в качестве функциональной схемы вместо или вместе с CPU.
[0016] Фиг. 2 является функциональной блок-схемой, иллюстрирующей функцию устройства 100 управления согласно первому варианту осуществления настоящего изобретения. В первом варианте осуществления, как проиллюстрировано на фиг. 2, устройство 100 управления включает в себя модуль 110 получения картографической информации, модуль 120 поиска рекомендуемого маршрута, модуль 130 прогнозирования энергопотребления, модуль 140 хранения коэффициентов коррекции, модуль 150 вычисления коэффициентов коррекции, модуль 160 определения необходимости заряда, модуль 170 поиска зарядной станции и модуль 180 отображения.
[0017] Модуль 110 получения картографической информации получает картографическую информацию, включающую в себя информацию дороги, из картографической базы 400 данных. Картографическая информация, полученная посредством модуля 110 получения картографической информации, передается в модуль 120 поиска рекомендуемого маршрута, модуль 130 прогнозирования энергопотребления и модуль 150 вычисления коэффициентов коррекции.
[0018] Модуль 120 поиска рекомендуемого маршрута выполняет поиск рекомендуемого маршрута от текущей позиции до пункта назначения на основе картографической информации, полученной из модуля 110 получения картографической информации, пункта назначения, введенного через устройство 200 ввода, и информации позиции рассматриваемого транспортного средства, определенной посредством устройства 300 определения позиции рассматриваемого транспортного средства.
[0019] Модуль 130 прогнозирования энергопотребления прогнозирует энергопотребление от текущей позиции до пункта назначения. В частности, модуль 130 прогнозирования энергопотребления прогнозирует сопротивление качению, сопротивление при движении по уклону, сопротивление воздуха и потери в приводном механизме, к примеру, в электромоторе и в зубчатой передаче на рекомендуемом маршруте. Модуль 130 прогнозирования энергопотребления прогнозирует энергопотребление от текущей позиции до пункта назначения посредством суммирования этих значений.
[0020] Сопротивление Fa воздуха, вызываемое, когда транспортное средство движется, может вычисляться на основе следующей формулы (1). В следующей формуле (1), Vcur указывает скорость движения транспортного средства, и K указывает параметр, связанный с сопротивлением воздуха, который включает в себя коэффициент сопротивления воздуха и расчетную площадь транспортного средства.
Формула 1
Сопротивление FA воздуха=kVcur2 (1)
[0021] Таким образом, сопротивление Fa воздуха изменяется в ответ на скорость Vcur транспортного средства, полученную, когда транспортное средство движется. Следовательно, например, когда рекомендуемый маршрут разделен на множество участков движения, интегральное значение сопротивления воздуха на каждом участке движения может вычисляться на основе средней скорости Vave участка движения и проезжаемого расстояния участка движения в качестве следующей формулы (2). Затем интегральные значения сопротивления воздуха на участках движения суммируются в качестве интегрального значения сопротивления воздуха до пункта назначения на рекомендуемом маршруте.
Формула 2
Интегральное значение сопротивления воздуха на участке движения=kVave2*d (2)
[0022] Тем не менее, интегральное значение сопротивления воздуха, вычисленное посредством формулы (2), представляет собой сопротивление воздуха, вызываемое, когда транспортное средство движется с постоянной средней скоростью Vave. Поскольку транспортное средство фактически движется с ускорением и замедлением, может вызываться ошибка между интегральным значением сопротивления воздуха, вычисленным посредством формулы (2), и интегральным значением фактического сопротивления воздуха. Иными словами, сопротивление воздуха, вызываемое, когда транспортное средство движется с постоянной скоростью, является пропорциональным квадрату скорости, как проиллюстрировано в формуле (2), но сопротивление воздуха, вызываемое, когда транспортное средство ускоряется, является пропорциональным кубу скорости. По этой причине, интегральное значение сопротивления воздуха на участке движения увеличивается по мере того, как транспортное средство ускоряется на участке движения. Соответственно, возникает ошибка между интегральным значением сопротивления воздуха, вычисленным посредством формулы (2), и интегральным значением фактического сопротивления воздуха.
[0023] Следовательно, когда модуль 130 прогнозирования энергопотребления прогнозирует интегральное значение сопротивления воздуха на каждом участке движения, интегральное значение сопротивления воздуха, вычисленное на основе формулы (2), корректируется с учетом влияния ускорения на каждом участке движения. В частности, модуль 130 прогнозирования энергопотребления корректирует сопротивление воздуха посредством использования коэффициента коррекции сопротивления воздуха, вычисленного посредством модуля 150 вычисления коэффициентов коррекции, который описывается ниже. Дополнительно, ниже описывается способ для коррекции интегрального значения сопротивления воздуха на участке движения.
[0024] Дополнительно, модуль 130 прогнозирования энергопотребления согласно варианту осуществления прогнозирует энергопотребление до пункта назначения на основе интегрального значения потерь, вызываемых в приводном механизме, к примеру, в электромоторе или в зубчатой передаче. Здесь, когда транспортное средство движется с постоянной скоростью на предварительно определенном участке движения, потери L в приводном механизме на участке движения вызваны сопротивлением движению, к примеру, сопротивлением качению и сопротивлением воздуха. Потери L в приводном механизме на участке движения могут вычисляться, например, на основе следующей формулы (3).
Формула 3
(3)
[0025] Тем не менее, интегральное значение потерь в приводном механизме, вычисленное посредством формулы (3), получается, когда транспортное средство движется с постоянной скоростью. Поскольку транспортное средство фактически движется с ускорением и замедлением, может вызываться ошибка между интегральным значением потерь в приводном механизме, вычисленным посредством формулы (3), и интегральным значением фактических потерь в приводном механизме. Иными словами, когда транспортное средство ускоряется, потери в приводном механизме, вызываемые посредством момента инерции, складываются с потерями L в приводном механизме, отличными от потерь в приводном механизме, вызываемых посредством сопротивления движению. По этой причине, может вызываться ошибка между потерями в приводном механизме, полученными посредством формулы (3), и фактическими потерями в приводном механизме. Когда модуль 130 прогнозирования энергопотребления прогнозирует интегральное значение потерь в приводном механизме на участке движения, потери в приводном механизме, вычисленные посредством формулы (3), корректируются с учетом влияния ускорения на участке движения. В частности, модуль 130 прогнозирования энергопотребления корректирует потери в приводном механизме, вычисленные посредством формулы (3), посредством использования коэффициента коррекции потерь, вычисленного посредством модуля 150 вычисления коэффициентов коррекции, который описывается ниже.
[0026] Модуль 140 хранения коэффициентов коррекции сохраняет коэффициент коррекции сопротивления воздуха для коррекции сопротивления воздуха на рекомендуемом маршруте и коэффициент коррекции потерь для коррекции потерь в приводном механизме на рекомендуемом маршруте. В дальнейшем в этом документе описываются коэффициент коррекции сопротивления воздуха и коэффициент коррекции потерь.
[0027] Фиг. 3 является графиком, иллюстрирующим пример интегрального значения фактического сопротивления воздуха на предварительно определенном участке движения и интегрального значения сопротивления воздуха, вычисленного посредством формулы (2). Дополнительно, на фиг. 3, интегральное значение фактического сопротивления воздуха указывается посредством белой гистограммы, а интегральное значение сопротивления воздуха, вычисленное посредством формулы (2), указывается посредством гистограммы с диагональной штриховкой. На фиг. 3, интегральное значение сопротивления воздуха, вычисленное посредством формулы (2), указывается посредством процентного отношения (%), когда интегральное значение фактического сопротивления воздуха задается в качестве 100%. Дополнительно, интегральное значение фактического сопротивления воздуха на фиг. 3, является интегральным значением сопротивления воздуха, полученным посредством эксперимента из профиля скорости движения, когда транспортное средство фактически движется на участке движения.
[0028] В примерах, проиллюстрированных на фиг. 3, когда скорость транспортного средства является низкой, интегральное значение сопротивления воздуха, вычисленное посредством формулы (2), составляет приблизительно 40% от интегрального значения фактического сопротивления воздуха. Это показывает то, что возникает большая ошибка относительно фактического сопротивления воздуха. Дополнительно, даже когда транспортное средство движется со средней скоростью, интегральное значение сопротивления воздуха, вычисленное посредством формулы (2), составляет приблизительно 60% от интегрального значения фактического сопротивления воздуха. Это показывает то, что возникает ошибка относительно фактического сопротивления воздуха. Дополнительно, когда транспортное средство движется с высокой скоростью, интегральное значение сопротивления воздуха, вычисленное посредством формулы (2), составляет приблизительно 100% от интегрального значения фактического сопротивления воздуха, близко к интегральному значению фактического сопротивления воздуха. Таким образом, существует такая тенденция, что ошибка между интегральным значением фактического сопротивления воздуха и интегральным значением сопротивления воздуха, вычисленным посредством формулы (2), увеличивается по мере того, как скорость транспортного средства на участке движения понижается.
[0029] В варианте осуществления, коэффициент коррекции сопротивления воздуха для коррекции ошибки сопротивления воздуха посредством ускорения сохраняется заранее в модуле 140 хранения коэффициентов коррекции. В дальнейшем в этом документе подробно описывается коэффициент коррекции сопротивления воздуха, сохраненный в модуле 140 хранения коэффициентов коррекции.
[0030] Коэффициент коррекции сопротивления воздуха, сохраненный в модуле 140 хранения коэффициентов коррекции, задается заранее, на основе интегрального значения фактического сопротивления воздуха, полученного заранее посредством эксперимента, и интегрального значения сопротивления воздуха, вычисленного заранее посредством формулы (2). Например, отношение между интегральным значением сопротивления воздуха, вычисленным на основе формулы (2), и интегральным значением фактического сопротивления воздуха, полученным посредством эксперимента, вычисляется заранее в качестве значения эксперимента по коэффициентам сопротивления воздуха для каждой средней скорости Vave транспортного средства на участке движения. Отношение "интегральное значение фактического сопротивления воздуха/интегральное значение сопротивления воздуха, вычисленное на основе формулы (2)", указывается в качестве вычисленных значений эксперимента. Затем вычисленные значения эксперимента по коэффициентам сопротивления воздуха наносятся на график для каждой средней скорости Vave транспортного средства на участке движения, как проиллюстрировано на фиг. 4(A). Дополнительно, фиг. 4(A) является схемой, иллюстрирующей пример значений эксперимента по коэффициентам сопротивления воздуха.
[0031] В варианте осуществления, например, как проиллюстрировано на фиг. 4(B), вычисляется линия регрессии нанесенных на график значений эксперимента по коэффициентам сопротивления воздуха. Затем вычисленная линия регрессии сохраняется заранее в качестве функции f1 (в дальнейшем в этом документе, называемой "функцией f1 вычисления сопротивления воздуха") в модуле 140 хранения коэффициентов коррекции. Функция f1 используется для вычисления коэффициента коррекции сопротивления воздуха. Таким образом, в варианте осуществления, коэффициент коррекции сопротивления воздуха для каждой средней скорости Vave транспортного средства на участке движения сохраняется в качестве функции f1 вычисления сопротивления воздуха в модуле 140 хранения коэффициентов коррекции. Дополнительно, фиг. 4(B) является схемой, иллюстрирующей пример функции f1 вычисления сопротивления воздуха.
[0032] Дополнительно, существует такая тенденция, что частота ускорения на участке движения уменьшается, когда участок движения является наклонным, по сравнению со случаем, в котором участок движения является плоским. Следовательно, в варианте осуществления, как проиллюстрировано на фиг. 5, функция f2 вычисления сопротивления воздуха, используемая, когда участок движения является наклонным, сохраняется заранее в модуле 140 хранения коэффициентов коррекции отдельно от функции f1 вычисления сопротивления воздуха, используемой, когда участок движения не является наклонным. Дополнительно, фиг. 5 является схемой, иллюстрирующей пример функции f2 вычисления сопротивления воздуха, используемой, когда участок движения является наклонным. На фиг. 5, значения эксперимента по коэффициентам сопротивления воздуха, полученные посредством эксперимента в наклонном участке движения, указываются посредством белого квадратного сегмента. Дополнительно, для удобства описания, функция f1 вычисления сопротивления воздуха, используемая, когда участок движения не является наклонным, также проиллюстрирована посредством пунктирной линии на фиг. 5.
[0033] Как проиллюстрировано на фиг. 5, когда средняя скорость Vave на участке движения является низкой (например, скорость ниже 40 км/ч), значение коэффициента коррекции сопротивления воздуха, вычисленное посредством функции f2 вычисления сопротивления воздуха, используемой, когда участок движения является наклонным, меньше значения коэффициента коррекции сопротивления воздуха, вычисленного посредством функции f1 вычисления сопротивления воздуха, используемой, когда участок движения не является наклонным. Таким образом, коэффициент коррекции сопротивления воздуха, вычисленный посредством функции f2 вычисления сопротивления воздуха, сохраняется в качестве значения, меньшего коэффициента коррекции сопротивления воздуха, вычисленного посредством функции f1 вычисления сопротивления воздуха. Соответственно, даже когда участок движения является наклонным, и частота ускорения на участке движения является низкой, можно надлежащим образом корректировать интегральное значение сопротивления воздуха на участке движения.
[0034] Дополнительно, функция f2 вычисления сопротивления воздуха, используемая, когда участок движения является наклонным, задается таким образом, что коэффициент коррекции сопротивления воздуха вычисляется в ответ на градус наклона участка движения. Иными словами, функция f2 вычисления сопротивления воздуха, проиллюстрированная на фиг. 5, примерно показывает функцию f2 вычисления сопротивления воздуха при предварительно определенном градусе наклона. Функция f2 вычисления сопротивления воздуха, сохраненная в модуле 140 хранения коэффициентов коррекции, может вычислять один коэффициент коррекции сопротивления воздуха в ответ на среднюю скорость Vave транспортного средства и наклон участка движения. Дополнительно, в варианте осуществления, функция f2 вычисления сопротивления воздуха может задаваться таким образом, что коэффициент коррекции сопротивления воздуха увеличивается мере того, как градус наклона участка движения уменьшается.
[0035] Дополнительно, фиг. 6 является графиком, иллюстрирующим пример интегрального значения фактических потерь в приводном механизме на предварительно определенном участке движения и интегрального значения потерь в приводном механизме, вычисленного на основе формулы (3). Дополнительно, на фиг. 6, интегральное значение фактических потерь в приводном механизме указывается посредством белой гистограммы, а интегральное значение потерь в приводном механизме, вычисленное на основе формулы (3), указывается посредством гистограммы с диагональной штриховкой. Дополнительно, на фиг. 6, интегральное значение потерь в приводном механизме, вычисленное на основе формулы (3), указывается посредством процентного отношения (%), когда интегральное значение фактических потерь в приводном механизме задается в качестве 100%. Дополнительно, фактические потери в приводном механизме являются потерями в приводном механизме, полученными посредством эксперимента из профиля скорости движения, когда транспортное средство фактически движется на участке движения.
[0036] В примере, проиллюстрированном на фиг. 6, когда скорость транспортного средства является низкой, интегральное значение потерь в приводном механизме, вычисленное посредством формулы (3), составляет приблизительно 30% от интегрального значения фактических потерь в приводном механизме. Это показывает то, что возникает большая ошибка относительно интегрального значения фактических потерь. Дополнительно, даже когда скорость транспортного средства является средней или высокой, возникает ошибка между интегральным значением фактических потерь и потерями, вычисленными посредством формулы (3), по мере того, как скорость транспортного средства понижается. Таким образом, существует такая тенденция, что ошибка между интегральным значением фактических потерь в приводном механизме и интегральным значением потерь в приводном механизме, вычисленным посредством формулы (3), увеличивается по мере того, как средняя скорость Vave транспортного средства понижается.
[0037] В варианте осуществления, коэффициент коррекции потерь для коррекции ошибки потерь в приводном механизме, к примеру, в электромоторе или в зубчатой передаче, сохраняется заранее в модуле 140 хранения коэффициентов коррекции. В дальнейшем в этом документе подробно описывается коэффициент коррекции потерь, сохраненный в модуле 140 хранения коэффициентов коррекции.
[0038] Коэффициент коррекции потерь, сохраненный в модуле 140 хранения коэффициентов коррекции, задается заранее на основе интегрального значения потерь, вызываемых посредством сопротивления движению, и интегрального значения потерь, вызываемых посредством момента инерции. Следует отметить, что интегральное значение потерь, вызываемых посредством сопротивления движению, вычисляется заранее на основе формулы (3). Интегральное значение потерь, вызываемых посредством момента инерции, вычисляется заранее на основе информации скорости, полученной, когда транспортное средство фактически движется на участке движения. Например, отношение между интегральным значением потерь, вызываемых посредством сопротивления движению, и интегральным значением потерь, вызываемых посредством момента инерции, вычисляется заранее в качестве значения эксперимента по коэффициенту потерь для каждой средней скорости Vave транспортного средства на участке движения. Отношение указывается как "({интегральное значение потерь в приводном механизме, вызываемых посредством сопротивления движению + интегральное значение потерь в приводном механизме, вызываемых посредством момента инерции}/интегральное значение потерь в приводном механизме, вызываемых посредством сопротивления движению)". Затем вычисленное значение эксперимента по коэффициенту потерь наносится на график для каждой средней скорости Vave транспортного средства на участке движения, как проиллюстрировано на фиг. 7(A). Фиг. 7(A) является схемой, иллюстрирующей пример значений эксперимента по коэффициентам потерь.
[0039] В варианте осуществления, например, как проиллюстрировано на фиг. 7(B), вычисляется линия регрессии нанесенных на график значений эксперимента по коэффициентам потерь. Затем вычисленная линия регрессии сохраняется заранее в качестве функции f3 (в дальнейшем в этом документе, называемой "функцией f3 вычисления потерь") в модуле 140 хранения коэффициентов коррекции. Функция f3 используется для вычисления коэффициента коррекции потерь. Фиг. 7(B) является схемой, иллюстрирующей пример функции f3 вычисления потерь.
[0040] Дополнительно, когда участок движения является наклонным, количество работы для электромотора или зубчатой передачи больше, чем в случае, когда участок движения является плоским. По этой причине, в варианте осуществления, как проиллюстрировано на фиг. 8, функция f4 вычисления потерь, используемая, когда участок движения является наклонным, сохраняется заранее в модуле 140 хранения коэффициентов коррекции отдельно от функции f3 вычисления потерь, используемой, когда участок движения не является наклонным. Фиг. 8 является схемой, иллюстрирующей пример функции f4 вычисления потерь, используемой, когда участок движения является наклонным. На фиг. 8, значения эксперимента по коэффициентам потерь, полученные посредством эксперимента в наклонном участке движения, указываются посредством белого квадратного сегмента. Дополнительно, для удобства описания, функция f3 вычисления потерь, используемая, когда участок движения не является наклонным, также проиллюстрирована на чертеже.
[0041] Как проиллюстрировано на фиг. 8, когда средняя скорость Vave участка движения является низкой (например, скорость ниже 35 км/ч), значение коэффициента коррекции потерь, вычисленное посредством функции f4 вычисления потерь, превышает значение коэффициента коррекции потерь, вычисленное посредством функции f3 вычисления потерь. Таким образом, коэффициент коррекции потерь, вычисленный посредством функции f4 вычисления потерь, сохраняется в качестве значения, большего коэффициента коррекции потерь, вычисленного посредством функции f3 вычисления потерь. По этой причине, даже когда участок движения является наклонным, и количество работы электромотора или зубчатой передачи на участке движения является большим, можно надлежащим образом корректировать интегральное значение потерь приводном механизме на участке движения.
[0042] Дополнительно, функция f4 вычисления потерь, используемая, когда участок движения является наклонным, задается таким образом, что коэффициент коррекции потерь может вычисляться в ответ на градус наклона участка движения. Иными словами, функция f4 вычисления потерь, проиллюстрированная на фиг. 8, примерно показывает функцию f4 вычисления потерь при предварительно определенном градусе наклона. Коэффициент f4 коррекции потерь, сохраненный в модуле 140 хранения коэффициентов коррекции, задается таким образом, что один коэффициент коррекции потерь может вычисляться в ответ на среднюю скорость Vave транспортного средства и наклон участка движения. Дополнительно, в варианте осуществления, функция f4 вычисления потерь может задаваться таким образом, что коэффициент коррекции потерь увеличивается по мере того, как наклон участка движения увеличивается.
[0043] Модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент коррекции сопротивления воздуха для коррекции интегрального значения сопротивления воздуха на участке движения. Модуль 150 вычисления коэффициентов коррекции вычисляет интегральное значение сопротивления воздуха посредством использования функции вычисления сопротивления воздуха, сохраненной в модуле 140 хранения коэффициентов коррекции. Дополнительно, модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент коррекции потерь для коррекции интегрального значения потерь в приводном механизме на участке движения посредством использования функции вычисления потерь, сохраненной в модуле 140 хранения коэффициентов коррекции. Коэффициент коррекции сопротивления воздуха и коэффициент коррекции потерь, вычисленные посредством модуля 150 вычисления коэффициентов коррекции, используются для того, чтобы прогнозировать энергопотребление до пункта назначения посредством модуля 130 прогнозирования энергопотребления.
[0044] Модуль 160 определения необходимости заряда определяет то, следует или нет заряжать аккумулятор, на основе результата прогнозирования модуля 130 прогнозирования энергопотребления. В частности, модуль 160 определения необходимости заряда сравнивает оставшуюся величину текущей энергии аккумулятора с энергопотреблением до пункта назначения, прогнозированным посредством модуля 130 прогнозирования энергопотребления. Модуль 160 определения необходимости заряда определяет то, что аккумулятор должен быть заряжен, когда энергопотребление до пункта назначения превышает оставшуюся величину текущей энергии аккумулятора. Результат определения, полученный посредством модуля 160 определения необходимости заряда, передается в модуль 170 поиска зарядной станции и модуль 180 отображения.
[0045] Когда модуль 160 определения необходимости заряда определяет то, что аккумулятор должен быть заряжен, модуль 170 поиска зарядной станции выполняет поиск зарядной станции, в которую может приехать транспортное средство, посредством оставшейся величины текущей энергии аккумулятора. Результат поиска модуля 170 поиска зарядной станции передается в модуль 180 отображения.
[0046] Модуль 180 отображения отображает информацию, включающую в себя энергопотребление до пункта назначения, прогнозированное посредством модуля 130 прогнозирования энергопотребления, результат определения, полученный посредством модуля 160 определения необходимости заряда, и зарядную станцию, искомую посредством модуля 170 поиска зарядной станции, на дисплее 500 в качестве информации для подсказки пассажиру рассматриваемого транспортного средства.
[0047] Ниже описывается процесс или последовательность для прогнозирования энергопотребления со ссылкой на фиг. 9. Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей процесс или последовательностью для прогнозирования энергопотребления согласно первому варианту осуществления настоящего изобретения. Например, процесс или последовательность для прогнозирования энергопотребления выполняется, когда пассажир вводит пункт назначения через устройство 200 ввода.
[0048] На этапе S101, модуль 120 поиска рекомендуемого маршрута выполняет поиск рекомендуемого маршрута от текущей позиции до пункта назначения. В частности, модуль 120 поиска рекомендуемого маршрута выполняет поиск рекомендуемого маршрута на основе картографической информации, полученной посредством модуля 110 получения картографической информации, пункта назначения, введенного посредством устройства 200 ввода, и текущей позиции рассматриваемого транспортного средства, определенной посредством устройства 300 определения позиции рассматриваемого транспортного средства.
[0049] На этапе S102, информация дороги рекомендуемого маршрута, искомого на этапе S101, получается посредством модуля 110 получения картографической информации. Информация дороги включает в себя информацию проезжаемого расстояния, информацию высоты и информацию средней скорости транспортного средства каждого предварительно определенного участка движения (например, соединения дорог и т.п.) на рекомендуемом маршруте. Например, когда участок движения рекомендуемого маршрута разделен на пять участков движения, модуль 110 получения картографической информации получает информацию дороги, включающую в себя информацию проезжаемого расстояния, информацию высоты и информацию средней скорости транспортного средства для каждого из пяти участков движения.
[0050] Здесь, фиг. 10 иллюстрирует пример информации дороги, полученной посредством модуля 110 получения картографической информации. Фиг. 10(A) иллюстрирует среднюю скорость Vave транспортного средства на каждом участке движения рекомендуемого маршрута. Фиг. 10(B) иллюстрирует высоту на каждом участке движения рекомендуемого маршрута. Дополнительно, на фиг. 10(A), горизонтальная ось указывает проезжаемое расстояние рекомендуемого маршрута, и линейный график указывает среднюю скорость Vave транспортного средства. Диапазон (например, a1 и a2 по фиг. 10(A)) между точками линии указывает среднюю скорость Vave транспортного средства для одного участка движения. Аналогично, даже на фиг. 10(B), горизонтальная ось указывает проезжаемое расстояние рекомендуемого маршрута, и линейный график указывает высоту. Диапазон (например, a1 и a2 по фиг. 10(B)) между точками на линии указывает высоту одного участка движения. Таким образом, модуль 110 получения картографической информации получает информацию дороги, включающую в себя проезжаемое расстояние каждого участка движения, высоту и среднюю скорость транспортного средства на участке движения.
[0051] Процессы на этапах S103-S116 выполняются для каждого участка движения рекомендуемого маршрута. В нижеприведенном описании, участок движения, который является целью в процессе на этапах S103-S116, описывается как целевой участок.
[0052] Во-первых, на этапе S103, модуль 130 прогнозирования энергопотребления определяет то, является или нет целевой участок наклонным. Например, модуль 130 прогнозирования энергопотребления вычисляет наклон целевого участка, как проиллюстрировано в следующей формуле (4), на основе информации высоты и информации проезжаемого расстояния, полученной на этапе S102. Модуль 130 прогнозирования энергопотребления определяет то, является или нет целевой участок наклонным, на основе вычисленного наклона целевого участка.
Наклон (%)=100*разность высот (м)/
проезжаемое расстояние (м) (4)
Когда целевой участок не является наклонным, процедура переходит к этапу S104. С другой стороны, когда целевой участок является наклонным, процедура переходит к этапу S106. Дополнительно, модуль 130 прогнозирования энергопотребления может определять то, что целевой участок является наклонным, например, когда наклон целевого участка равен или выше 1%. Модуль 130 прогнозирования энергопотребления также может определять то, что целевой участок является наклонным, например, когда наклон целевого участка равен или меньше -1%.
[0053] На этапе S104, интегральное значение сопротивления Fr качению на целевом участке вычисляется посредством модуля 130 прогнозирования энергопотребления. В частности, модуль 130 прогнозирования энергопотребления вычисляет его на основе информации проезжаемого расстояния целевого участка, полученного на этапе S102, как проиллюстрировано в следующей формуле (5).
Формула 4
Интегральное значение сопротивления Fr качению=μWg*d (5)
В формуле (5), μ указывает коэффициент сопротивления качению, W указывает вес транспортного средства, g указывает гравитационное ускорение, и d указывает проезжаемое расстояние целевого участка.
[0054] Дополнительно, на этапе S105, коэффициент α коррекции сопротивления воздуха целевого участка вычисляется посредством модуля 150 вычисления коэффициентов коррекции. В частности, модуль 150 вычисления коэффициентов коррекции вычисляет его на основе средней скорости Vave транспортного средства целевого участка и функции f1 вычисления коэффициентов коррекции, как проиллюстрировано в следующей формуле (6). Функция f1 вычисления коэффициентов коррекции является функцией, используемой, когда участок движения не является наклонным, и сохраняется в модуле 140 хранения коэффициентов коррекции.
Формула 5
Коэффициент α коррекции сопротивления воздуха=f1(Vave) (6)
[0055] С другой стороны, на этапе S103, когда определено, что целевой участок является наклонным, процедура переходит к этапу S106. На этапе S106, поскольку определено, что целевой участок является наклонным, сопротивление Fi при движении по уклону целевого участка вычисляется посредством модуля 130 прогнозирования энергопотребления. В частности, модуль 130 прогнозирования энергопотребления вычисляет его на основе следующей формулы (7).
Формула 6
Интегральное значение сопротивления Fi
при движении по уклону=Wgsinθ*d (7)
В формуле (7), W указывает вес транспортного средства, g указывает гравитационное ускорение, θ указывает наклон целевого участка, и d указывает проезжаемое расстояние целевого участка.
[0056] На этапе S107, интегральное значение сопротивления Fr качению целевого участка вычисляется аналогично этапу S104.
[0057] Затем на этапе S108 коэффициент коррекции сопротивления воздуха целевого участка вычисляется посредством модуля 150 вычисления коэффициентов коррекции. На этапе S108 определено, что целевой участок является наклонным. По этой причине, модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент α коррекции сопротивления воздуха целевого участка на основе угла θ наклона целевого участка, средней скорости Vave транспортного средства целевого участка и функции f2 вычисления коэффициентов коррекции, как проиллюстрировано в следующей формуле (8). Функция f2 вычисления коэффициентов коррекции является функцией, используемой, когда участок движения является наклонным.
Формула 7
Коэффициент α коррекции сопротивления
воздуха = f2(Vave, θ) (8)
[0058] На этапе S109, интегральное значение сопротивления Fa воздуха целевого участка вычисляется посредством модуля 130 прогнозирования энергопотребления. В частности, модуль 130 прогнозирования энергопотребления вычисляет его на основе проезжаемого расстояния d целевого участка и средней скорости Vave целевого участка, полученной на этапе S102, как проиллюстрировано в следующей формуле (9).
Формула 8
Интегральное значение сопротивления Fa воздуха=kV2*d (9)
В формуле (9), k является параметром, связанным с сопротивлением воздуха, который включает в себя коэффициент сопротивления воздуха или расчетную площадь транспортного средства.
[0059] На этапе S110, интегральное значение сопротивления Fa воздуха, вычисленное на этапе S109, корректируется посредством модуля 130 прогнозирования энергопотребления. В частности, модуль 130 прогнозирования энергопотребления корректирует его на основе коэффициента α коррекции сопротивления воздуха, вычисленного на этапе S105 или на этапе S108, и интегрального значения сопротивления Fa воздуха, вычисленного на этапе S109, как проиллюстрировано в следующей формуле (10). В нижеприведенном описании, интегральное значение сопротивления Fa воздуха, которое скорректировано на этапе S110, описывается как интегральное значение для значения Fa' коррекции сопротивления воздуха.
Формула 9
Интегральное значение для значения Fa' коррекции сопротивления воздуха = интегральное значение сопротивления Fa воздуха * коэффициент α коррекции сопротивления воздуха (10)
[0060] Затем, на этапе S111, определяется то, является или нет целевой участок наклонным, аналогично этапу S103. Когда целевой участок не является наклонным, процедура переходит к этапу S112. С другой стороны, когда целевой участок является наклонным, процедура переходит к этапу S113.
[0061] На этапе S112, коэффициент β коррекции потерь целевого участка вычисляется посредством модуля 150 вычисления коэффициентов коррекции. На этапе S112, определяется то, что целевой участок процесса не является наклонным. По этой причине, модуль 150 вычисления коэффициентов коррекции вычисляет его на основе средней скорости Vave целевого участка, полученной на этапе S102, и функции f3 вычисления потерь, как проиллюстрировано в следующей формуле (11). Функция f3 вычисления потерь является функцией, используемой, когда участок движения не является наклонным, и сохраняется в модуле 140 хранения коэффициентов коррекции.
Формула 10
Коэффициент β коррекции потерь = f3(Vave) (11)
[0062] С другой стороны, на этапе S111, когда определено, что целевой участок является наклонным, процедура переходит к этапу S113. На этапе S113, определяется то, что целевой участок является наклонным. По этой причине, модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент β коррекции потерь целевого участка на основе средней скорости Vave целевого участка, полученной на этапе S102, и функции f4 вычисления потерь, как проиллюстрировано в следующей формуле (12). Функция f4 вычисления потерь является функцией, используемой, когда участок движения является наклонным, и сохраняется в модуле 140 хранения коэффициентов коррекции.
Формула 11
Коэффициент β коррекции потерь = f4(Vave, θ) (12)
[0063] Затем на этапе S114, интегральное значение потерь L в приводном механизме целевого участка вычисляется посредством модуля 130 прогнозирования энергопотребления. В частности, модуль 130 прогнозирования энергопотребления вычисляет его на основе интегрального значения для значения Fa' коррекции сопротивления воздуха, вычисленного на этапе S110, и интегрального значения сопротивления Fr качению, вычисленного на этапе S104 или этапе S107, как проиллюстрировано в следующей формуле (13).
Формула 12
(13)
[0064] На этапе S115, интегральное значение потерь L в приводном механизме на целевом участке, вычисленное на этапе S114, корректируется посредством модуля 130 прогнозирования энергопотребления. В частности, модуль 130 прогнозирования энергопотребления корректирует его на основе интегрального значения потерь L в приводном механизме, вычисленного на этапе S114, и коэффициента β коррекции потерь, вычисленного на этапе S112 или этапе S113, как проиллюстрировано в следующей формуле (14). Дополнительно, в нижеприведенном описании, интегральное значение потерь L, скорректированные на этапе S115, описывается как интегральное значение для значения L' коррекции потерь.
Формула 13
Интегральное значение для значения L' коррекции потерь=интегральное значение потерь L * (коэффициент β коррекции потерь) (14)
[0065] На этапе S116, модуль 130 прогнозирования энергопотребления оценивает, выполнены или нет процессы этапов S103-S115 на всех участках движения рекомендуемого маршрута. Когда процессы этапов S103-S115 выполнены на всех участках движения рекомендуемого маршрута, процедура переходит к этапу S117. С другой стороны, когда имеется участок движения, на котором не выполнены процессы этапов S103-S115, процедура возвращается к этапу S103, так что процессы этапов S103-S115 выполняются на участке движения, на котором процессы еще не выполнены.
[0066] Затем, на этапе S117, энергопотребление от текущей позиции до пункта назначения прогнозируется посредством модуля 130 прогнозирования энергопотребления. В частности, модуль 130 прогнозирования энергопотребления складывает интегральное значение сопротивления Fr качению, интегральное значение сопротивления Fi при движении по уклону, интегральное значение для значения Fa' коррекции сопротивления воздуха и интегральное значение скорректированного значения L' потерь на каждом участке движения рекомендуемого маршрута. Сложенное интегральное значение представляет собой энергопотребление для каждого участка движения. Модуль 130 прогнозирования энергопотребления суммирует энергопотребление участков движения в качестве энергопотребления рекомендуемого маршрута. В частности, модуль 130 прогнозирования энергопотребления вычисляет энергопотребление рекомендуемого маршрута на основе следующей формулы (15). Информация энергопотребления, прогнозированного посредством модуля 130 прогнозирования энергопотребления, передается в модуль 180 отображения.
Формула 14
[0067] На этапе S118, модуль 160 определения необходимости заряда определяет то, следует или нет заряжать аккумулятор до тех пор, пока транспортное средство не достигнет пункта назначения, на основе прогнозного энергопотребления до пункта назначения на этапе S117. В частности, модуль 160 определения необходимости заряда определяет то, что аккумулятор должен быть заряжен, когда энергопотребление до пункта назначения превышает оставшуюся величину энергии аккумулятора. Модуль 160 определения необходимости заряда определяет то, что аккумулятор не должен быть заряжен, когда энергопотребление до пункта назначения равно или меньше оставшейся величины энергии аккумулятора. Результат, определенный посредством модуля 160 определения необходимости заряда, передается в модуль 180 отображения.
[0068] На этапе S118, когда определяется то, что аккумулятор должен быть заряжен, процедура переходит к этапу S119. На этапе S119, выполняется поиск зарядной станции около транспортного средства посредством модуля 170 поиска зарядной станции. В частности, модуль 170 поиска зарядной станции выполняет поиск зарядной станции, в которую может приехать транспортное средство, посредством оставшейся величины текущей энергии аккумулятора на основе картографической информации, полученной посредством картографической базы 400 данных, и текущей позиции транспортного средства, определенной посредством устройства 300 определения позиции рассматриваемого транспортного средства. Затем информация зарядной станции, искомой посредством модуля 170 поиска зарядной станции, передается в модуль 180 отображения.
[0069] На этапе S120, модуль 180 отображения отображает информацию, включающую в себя энергопотребление до пункта назначения, на дисплее 500 для подсказки пассажиру. В частности, модуль 180 отображения отображает информацию, включающую в себя энергопотребление до пункта назначения, прогнозированное на этапе S117, результат определения необходимости заряда на этапе S118, и позицию зарядной станции, искомую на этапе S119, на экране дисплея 500. Соответственно, эти виды информации подсказываются пассажиру.
[0070] Как описано выше, в первом варианте осуществления настоящего изобретения, интегральное значение сопротивления воздуха до пункта назначения корректируется с учетом сопротивления воздуха, вызываемого посредством ускорения транспортного средства, когда прогнозируется энергопотребление до пункта назначения. Дополнительно, интегральное значение потерь в приводном механизме до пункта назначения корректируется с учетом потерь в приводном механизме, вызываемых посредством ускорения транспортного средства. Соответственно, в варианте осуществления, можно с высокой точностью прогнозировать интегральное значение сопротивления воздуха до пункта назначения и интегральное значение потерь в приводном механизме. Как результат, можно надлежащим образом прогнозировать энергопотребление до пункта назначения. В частности, поскольку электромобиль имеет такой признак, что аккумулятор является тяжелым, и проезжаемое расстояние является коротким по сравнению с транспортным средством с двигателем, желательно с высокой точностью определять то, достигает или нет транспортное средство пункта назначения. В варианте осуществления, можно с высокой точностью прогнозировать энергопотребление до пункта назначения в таком случае. Как результат, можно с высокой точностью определять то, достигает или нет транспортное средство пункта назначения.
[0071] Фиг. 11 является графиком, иллюстрирующим пример временного перехода фактической скорости транспортного средства, средней скорости транспортного средства и интегрального значения фактического сопротивления воздуха на предварительно определенном участке движения. На фиг 11, график также иллюстрирует интегральное значение сопротивления воздуха, прогнозированное на основе формулы (2), и интегральное значение сопротивления воздуха, прогнозированное на основе формулы (10), на предварительно определенном участке движения. На фиг. 11, фактическая скорость транспортного средства и средняя скорость транспортного средства, соответственно, указываются посредством пунктирной линии. На фиг. 11, интегральное значение фактического сопротивления воздуха, интегральное значение сопротивления воздуха, прогнозированное на основе формулы (2), и интегральное значение сопротивления воздуха, прогнозированное на основе формулы (10), соответственно, указываются посредством сплошной линии. Дополнительно, фактическая скорость транспортного средства и средняя скорость транспортного средства по фиг. 11 соответствуют скорости транспортного средства (км/ч) в левой стороне графика. Кроме того, интегральное значение фактического сопротивления воздуха, интегральное значение сопротивления воздуха, прогнозированное на основе формулы (2), и интегральное значение сопротивления воздуха, прогнозированное на основе формулы (10), соответствуют интегральному значению сопротивления воздуха (kJ) в правой стороне графика на фиг. 11. Дополнительно, фактическое сопротивление воздуха представляет собой сопротивление воздуха, полученное посредством эксперимента из профиля скорости движения, когда транспортное средство фактически движется на участке движения (то же применимо к фиг. 12 и 13 ниже).
[0072] Сопротивление воздуха является пропорциональным квадрату скорости транспортного средства, когда транспортное средство движется с постоянной скоростью транспортного средства. Наоборот, сопротивление воздуха является пропорциональным кубу скорости транспортного средства, когда транспортное средство ускоряется. По этой причине, как проиллюстрировано на фиг. 12, возникает ошибка между фактическим сопротивлением воздуха (указываемым посредством белой гистограммы на фиг. 12), и сопротивлением воздуха, прогнозированным на основе постоянной средней скорости Vave транспортного средства, как проиллюстрировано в формуле (2) (указываемым посредством гистограммы с диагональной штриховкой на фиг. 12) в рамках периода, пока транспортное средство ускоряется. Например, в примере, проиллюстрированном на фиг. 12, сопротивление воздуха, прогнозированное на основе формулы (2), максимально составляет приблизительно 1/4 от фактического сопротивления воздуха. Наоборот, поскольку сопротивление воздуха (указываемое посредством серой гистограммы на фиг. 12), прогнозированное посредством коэффициента α коррекции сопротивления воздуха, как проиллюстрировано в формуле (10), корректирует сопротивление воздуха с учетом ускорения транспортного средства, сопротивление воздуха практически равно фактическому сопротивлению воздуха.
[0073] Фиг. 12 является графиком, иллюстрирующим пример интегрального значения фактического сопротивления воздуха (указываемого посредством белой гистограммы на фиг. 12) на предварительно определенном участке движения, интегрального значения сопротивления воздуха, прогнозированного из средней скорости Vave транспортного средства на участке движения на основе формулы (2) (указываемого посредством гистограммы с диагональной штриховкой на фиг. 12), и интегрального значения сопротивления воздуха, прогнозированного посредством использования коэффициента α коррекции сопротивления воздуха на основе формулы (10) (указываемого посредством серой гистограммы на фиг. 12). Дополнительно, фиг. 12 иллюстрирует сопротивление воздуха, прогнозированное на основе формулы (10), и сопротивление воздуха, прогнозированное на основе формулы (2), в то время как фактическое сопротивление воздуха посредством эксперимента задается в качестве 100%.
[0074] Более конкретно, как проиллюстрировано на фиг. 12, когда скорость транспортного средства является низкой, ошибка между фактическим сопротивлением воздуха и сопротивлением воздуха, прогнозированным на основе формулы (2), составляет приблизительно 60%. Наоборот, ошибка между фактическим сопротивлением воздуха и сопротивлением воздуха, прогнозированным на основе формулы (10), составляет приблизительно 5%. При сопротивлении воздуха, прогнозированном на основе формулы (10), ошибка относительно фактического сопротивления воздуха является небольшой по сравнению с сопротивлением воздуха, прогнозированным на основе формулы (2). Аналогично, даже когда скорость транспортного средства является средней, ошибка относительно фактического сопротивления воздуха является небольшой при сопротивлении воздуха, прогнозированном на основе формулы (10), по сравнению с сопротивлением воздуха, прогнозированным на основе формулы (2).
[0075] Таким образом, навигационное устройство 1 варианта осуществления корректирует интегральное значение сопротивления воздуха, вычисленное на основе постоянной средней скорости Vave транспортного средства, как проиллюстрировано в формуле (10), с учетом сопротивления воздуха, увеличенного посредством ускорения. Соответственно, можно эффективно предотвращать такую проблему, что интегральное значение сопротивления воздуха участка движения прогнозируется в качестве значения, меньшего интегрального значения фактического сопротивления воздуха. Дополнительно, навигационное устройство 1 варианта осуществления вычисляет коэффициент α коррекции сопротивления воздуха таким образом, что интегральное значение сопротивления воздуха на участке движения увеличивается по мере того, как средняя скорость Vave транспортного средства на участке движения понижается. Затем навигационное устройство 1 корректирует интегральное значение сопротивления воздуха на основе вычисленного коэффициента α коррекции сопротивления воздуха. Соответственно, даже когда средняя скорость Vave транспортного средства является низкой, и частота ускорения является высокой на участке движения, можно надлежащим образом прогнозировать интегральное значение сопротивления воздуха.
[0076] Дополнительно, навигационное устройство 1 варианта осуществления вычисляет коэффициент α коррекции сопротивления воздуха таким образом, что интегральное значение сопротивления воздуха на участке движения является небольшим, когда участок движения является наклонным. Поскольку существует такая тенденция, что частота ускорения является низкой, когда участок движения является наклонным, по сравнению со случаем, в котором участок движения не является наклонным. Соответственно, даже когда участок движения является наклонным, можно надлежащим образом прогнозировать сопротивление воздуха на участке движения.
[0077] Фиг. 13 является графиком, иллюстрирующим пример интегрального значения фактического сопротивления воздуха, когда участок движения является наклонным (указываемого посредством белой гистограммы на фиг. 13), интегрального значения сопротивления воздуха, прогнозированного посредством использования коэффициента α коррекции сопротивления воздуха для плоского участка движения (указываемого посредством серой гистограммы на фиг. 13), и интегрального значения сопротивления воздуха, прогнозированного посредством использования коэффициента α коррекции сопротивления воздуха для наклонного участка движения (указываемого посредством гистограммы с горизонтальной штриховкой на фиг. 13).
[0078] Как проиллюстрировано на фиг. 13, в случае если участок движения представляет собой спуск, имеющий предварительно определенный наклон, когда интегральное значение сопротивления воздуха прогнозируется посредством использования коэффициента α коррекции сопротивления воздуха для плоского участка движения, прогнозное интегральное значение сопротивления воздуха превышает интегральное значение фактического сопротивления воздуха приблизительно на 30%. Наоборот, в идентичном случае, когда интегральное значение сопротивления воздуха прогнозируется посредством использования коэффициента α коррекции сопротивления воздуха для наклонного участка движения, прогнозное интегральное значение сопротивления воздуха превышает интегральное значение фактического сопротивления воздуха приблизительно на 10%. Иными словами, когда интегральное значение сопротивления воздуха прогнозируется посредством использования коэффициента α коррекции сопротивления воздуха для наклонного участка движения, можно прогнозировать значение, практически равное фактическому сопротивлению воздуха, по сравнению с использованием коэффициента α коррекции сопротивления воздуха для плоского участка движения. Аналогично, даже в случае, если участок движения представляет собой подъем, имеющий предварительно определенный наклон, когда интегральное значение сопротивления воздуха прогнозируется посредством коэффициента α коррекции сопротивления воздуха для наклонного участка движения, можно прогнозировать значение близко к фактическому сопротивлению воздуха по сравнению с использованием коэффициента α коррекции сопротивления воздуха для плоского участка движения. Таким образом, навигационное устройство 1 варианта осуществления может эффективно предотвращать такую проблему, что интегральное значение сопротивления воздуха до пункта назначения прогнозируется в качестве значения, большего интегрального значения фактического сопротивления воздуха. Поскольку, когда участок движения является наклонным, навигационное устройство 1 прогнозирует интегральное значение с учетом наклона участка движения и прогнозирует посредством использования коэффициента α коррекции сопротивления воздуха для наклонного участка движения.
[0079] Дополнительно, навигационное устройство 1 варианта осуществления корректирует интегральное значение потерь в приводном механизме, вычисленное на основе средней скорости транспортного средства на участке движения, как проиллюстрировано в формуле (3). Поскольку потери в приводном механизме, к примеру, в электромоторе или в зубчатой передаче увеличиваются, когда транспортное средство ускоряется.
[0080] Фиг. 14 является графиком, иллюстрирующим пример временного перехода фактической скорости транспортного средства, средней скорости транспортного средства и интегрального значения фактических потерь в приводном механизме на предварительно определенном участке движения. На фиг. 14, график также иллюстрирует интегральное значение потерь в приводном механизме, прогнозированное на основе средней скорости Vave транспортного средства на участке движения, как проиллюстрировано в формуле (3), и интегральное значение потерь в приводном механизме, прогнозированное на основе коэффициента β коррекции потерь, как проиллюстрировано в формуле (14). На фиг. 14, фактическая скорость транспортного средства и средняя скорость транспортного средства на участке движения, соответственно, указываются посредством пунктирной линии. На фиг. 14, интегральное значение фактических потерь в приводном механизме, интегральное значение потерь в приводном механизме, прогнозированное на основе формулы (3), и интегральное значение потерь в приводном механизме, прогнозированное на основе формулы (10), соответственно, указываются посредством сплошной линии. Дополнительно, на фиг. 14, фактическая скорость транспортного средства и средняя скорость Vave транспортного средства на участке движения соответствуют скорости транспортного средства (км/ч) в левой стороне графика. Интегральное значение фактических потерь в приводном механизме на участке движения, интегральное значение потерь в приводном механизме, прогнозированное на основе формулы (3), и интегральное значение потерь в приводном механизме, прогнозированное на основе формулы (14), соответствуют интегральному значению потерь (kJ) в приводном механизме в правой стороне графика. Фактические потери в приводном механизме являются потерями, полученными посредством эксперимента из профиля скорости движения, полученного, когда транспортное средство фактически движется на участке движения (то же применимо к фиг. 15 и 16 ниже).
[0081] Когда транспортное средство ускоряется, потери в приводном механизме включают в себя потери, вызываемые посредством момента инерции, и потери, вызываемые посредством сопротивления движению. По этой причине, как проиллюстрировано на фиг. 15, возникает ошибка между интегральным значением фактических потерь в приводном механизме и интегральным значением потерь в приводном механизме, прогнозированным на основе формулы (3), в рамках периода, пока транспортное средство ускоряется. Например, в примере, проиллюстрированном на фиг. 15, интегральное значение потерь в приводном механизме, прогнозированное на основе формулы (3), максимально составляет приблизительно 1/6 от фактических потерь в приводном механизме. Наоборот, как проиллюстрировано в формуле (14), интегральное значение потерь в приводном механизме, прогнозированное посредством использования коэффициента β коррекции потерь, корректирует потери в приводном механизме с учетом ускорения транспортного средства. Следовательно, интегральное значение потерь практически равно фактическим потерям в приводном механизме.
[0082] Фиг. 15 является графиком, иллюстрирующим пример интегрального значения фактических потерь в приводном механизме на предварительно определенном участке движения (указываемого посредством белой гистограммы на фиг. 15), интегрального значения потерь в приводном механизме, прогнозированного посредством использования средней скорости Vave транспортного средства на основе формулы (3) (указываемого посредством гистограммы с диагональной штриховкой на фиг. 15), и интегрального значения потерь в приводном механизме, прогнозированного посредством использования коэффициента β коррекции потерь на основе формулы (14) (указываемого посредством серой гистограммы на фиг. 15). Фиг. 15 иллюстрирует интегральное значение потерь в приводном механизме, прогнозированное на основе формулы (3), и интегральное значение потерь в приводном механизме, прогнозированное на основе формулы (14), в то время как интегральное значение фактических потерь в приводном механизме посредством эксперимента задается в качестве 100%.
[0083] Как проиллюстрировано на фиг. 15, когда скорость транспортного средства является низкой, ошибка между интегральным значением фактических потерь в приводном механизме и интегральным значением потерь в приводном механизме, прогнозированным на основе формулы (3), составляет 70%. Наоборот, ошибка между интегральным значением фактических потерь в приводном механизме и интегральным значением потерь в приводном механизме, прогнозированным на основе формулы (14), составляет 5%. Относительно интегрального значения фактических потерь в приводном механизме, ошибка интегрального значения потерь в приводном механизме, прогнозированного на основе формулы (14), является небольшой по сравнению с ошибкой интегрального значения потерь в приводном механизме, прогнозированного на основе формулы (3). Аналогично, даже когда скорость транспортного средства является средней или высокой относительно интегрального значения фактических потерь в приводном механизме, ошибка интегрального значения потерь в приводном механизме, прогнозированного на основе формулы (14), является небольшой по сравнению с ошибкой интегрального значения потерь в приводном механизме, прогнозированного на основе формулы (3).
[0084] Таким образом, навигационное устройство 1 варианта осуществления корректирует интегральное значение потерь в приводном механизме, вычисленное на основе средней скорости Vave транспортного средства с учетом потерь в приводном механизме, увеличенной посредством ускорения, как проиллюстрировано в формуле (14). Соответственно, можно эффективно предотвращать такую проблему, что интегральное значение потерь в приводном механизме на участке движения прогнозируется в качестве значения, меньшего фактических потерь в приводном механизме. Дополнительно, навигационное устройство 1 варианта осуществления вычисляет коэффициент β коррекции потерь таким образом, что интегральное значение потерь в приводном механизме увеличивается по мере того, как средняя скорость Vave транспортного средства понижается. Затем навигационное устройство 1 корректирует интегральное значение потерь в приводном механизме на основе вычисленного коэффициента β коррекции потерь. Соответственно, даже на участке движения, на котором средняя скорость Vave транспортного средства является низкой, а частота ускорения является высокой, можно надлежащим образом прогнозировать интегральное значение потерь в приводном механизме на участке движения.
[0085] Дополнительно, навигационное устройство 1 вычисляет коэффициент β коррекции потерь таким образом, что интегральное значение потерь в приводном механизме является большим, когда участок движения является наклонным, по сравнению со случаем, в котором участок движения не является наклонным. Поскольку количество работы является большим, когда участок движения является наклонным, по сравнению со случаем, в котором участок движения не является наклонным. Соответственно, даже когда участок движения является наклонным, можно надлежащим образом прогнозировать потери в приводном механизме на участке движения.
[0086] Фиг. 16 является графиком, иллюстрирующим пример интегрального значения фактических потерь в приводном механизме, когда участок движения является наклонным (указываемого посредством белой гистограммы на фиг. 16), интегрального значения потерь в приводном механизме, прогнозированного посредством использования коэффициента β коррекции потерь для плоского участка движения (указываемого посредством серой гистограммы на фиг. 16), и интегрального значения потерь в приводном механизме, прогнозированного посредством использования коэффициента β коррекции потерь для наклонного участка движения (указываемого посредством гистограммы с горизонтальными линиями на фиг. 16).
[0087] Как проиллюстрировано на фиг. 16, в случае если участок движения представляет собой спуск, имеющий предварительно определенный наклон, когда интегральное значение потерь в приводном механизме прогнозируется посредством использования коэффициента β коррекции потерь для плоского участка движения, прогнозное интегральное значение потерь меньше интегрального значения фактических потерь приблизительно на 10%. Наоборот, в идентичном случае, когда интегральное значение потерь в приводном механизме прогнозируется посредством использования коэффициента β коррекции потерь для наклонного участка движения, прогнозное интегральное значение потерь в приводном механизме превышает интегральное значение фактических потерь приблизительно на 5%. Иными словами, когда интегральное значение потерь в приводном механизме прогнозируется посредством использования коэффициента β коррекции потерь для наклонного участка движения, можно прогнозировать значение, практически равное интегральному значению фактических потерь приводном механизме, по сравнению со случаем, в котором интегральное значение потерь в приводном механизме прогнозируется посредством использования коэффициента β коррекции потерь для плоского участка движения.
[0088] Аналогично, даже в случае, если участок движения представляет собой подъем, имеющий предварительно определенный наклон, когда интегральное значение потерь в приводном механизме прогнозируется посредством использования коэффициента β коррекции потерь для наклонного участка движения, можно прогнозировать значение близко к фактическим потерям в приводном механизме, по сравнению со случаем, в котором интегральное значение потерь в приводном механизме прогнозируется посредством использования коэффициента β коррекции потерь для плоского участка движения. Таким образом, коэффициент β коррекции потерь для наклонного участка движения используется, когда участок движения является наклонным. Затем можно эффективно предотвращать такую проблему, что интегральное значение потерь в приводном механизме до пункта назначения прогнозируется в качестве значения, меньшего фактического значения.
[0089] Второй вариант осуществления
Далее описывается навигационное устройство согласно второму варианту осуществления настоящего изобретения. Навигационное устройство 1 согласно второму варианту осуществления является аналогичным навигационному устройству 1 согласно первому варианту осуществления за исключением того, что устройство 100 управления имеет функцию, проиллюстрированную на фиг. 17, и работает так, как описано ниже. Фиг. 17 является функциональной блок-схемой, иллюстрирующей функцию устройства 100 управления согласно второму варианту осуществления.
[0090] Во втором варианте осуществления, как проиллюстрировано на фиг. 17, устройство 100 управления включает в себя модуль 210 получения температуры окружающего воздуха, выполненный с возможностью получать температуру окружающего воздуха, модуль 220 получения информации транспортного средства, выполненный с возможностью получать информацию транспортного средства, и модуль 230 вычисления коэффициентов сопротивления качению, выполненный с возможностью вычислять коэффициент сопротивления качению, в дополнение к функции согласно первому варианту осуществления.
[0091] Модуль 210 получения температуры окружающего воздуха получает температуру окружающего воздуха за пределами транспортного средства. Например, модуль 210 получения температуры окружающего воздуха может получать информацию температуры окружающего воздуха из температуры наружного воздуха измеряют, если в транспортном средстве смонтирован термометр, определяющий температуру окружающего воздуха. Дополнительно, модуль 210 получения температуры окружающего воздуха прогнозирует температуру окружающего воздуха транспортного средства, как описано ниже, даже если в транспортном средстве не смонтирован термометр.
[0092] Иными словами, модуль 210 получения температуры окружающего воздуха прогнозирует температуру окружающего воздуха на основе времени года, месяца, даты, региона участка движения, а также широты и долготы участка движения. Соответственно, может получаться температура окружающего воздуха. Например, условие, установленное посредством комбинации, по меньшей мере, одного или более из времени года, месяца, даты, региона, широты и долготы в текущий момент времени, сохраняется в навигационном устройстве 1 заранее. Дополнительно, корреляция с вышеуказанным условием и прогнозированным значением температуры окружающего воздуха сохраняется в навигационном устройстве 1 заранее. Альтернативно, условие и корреляция получаются из сервера (не проиллюстрирован). Соответственно, можно прогнозировать температуру окружающего воздуха за пределами транспортного средства.
[0093] Когда температура окружающего воздуха прогнозируется на основе комбинации времени года, месяца, даты, региона, широты и долготы, прогнозированное значение температуры окружающего воздуха получается с более высокой точностью (прогнозированное значение температуры окружающего воздуха получается в меньшем температурном интервале) по мере того, как температура окружающего воздуха понижается. Например, когда прогнозная температура окружающего воздуха равна или выше 10°C, корреляция между условием и прогнозированным значением температуры окружающего воздуха сохраняется, так что модуль 210 получения температуры окружающего воздуха прогнозирует температуру окружающего воздуха в температурном интервале, равном или превышающем 10°C. С другой стороны, когда температура окружающего воздуха ниже 10°C, корреляция между условием и прогнозированным значением температуры окружающего воздуха сохраняется, так что модуль 210 получения температуры окружающего воздуха прогнозирует температуру окружающего воздуха в температурном интервале ниже 5°C. Во втором варианте осуществления, сопротивление качению транспортного средства вычисляется на основе температуры окружающего воздуха, как описано ниже. В этом случае, величина изменения сопротивления качению увеличивается по мере того, как температура окружающего воздуха понижается. По этой причине, температура окружающего воздуха прогнозируется в меньшем температурном интервале прогнозирования по мере того, как температура окружающего воздуха понижается. Соответственно, можно с высокой точностью вычислять сопротивление качению транспортного средства.
[0094] Модуль 220 получения информации транспортного средства получает информацию транспортного средства, включающую в себя вес транспортного средства (вес транспортного средства, за исключением веса пассажиров), сопротивление на ступице тормоза вследствие торможения, коэффициент сопротивления воздуха и расчетную площадь. Вес транспортного средства, за исключением веса пассажиров, сопротивление на ступице тормоза вследствие торможения, коэффициент сопротивления воздуха и расчетная площадь различаются в соответствии с типом транспортных средств. Устройство 100 управления сохраняет эти значения заранее в запоминающем устройстве в соответствии с типом транспортных средств. По этой причине, модуль 220 получения информации транспортного средства может считывать информацию транспортного средства из запоминающего устройства для устройства 100 управления.
[0095] Модуль 230 вычисления коэффициентов сопротивления качению вычисляет коэффициент сопротивления качению для получения сопротивления качению. Фиг. 18 является схемой, иллюстрирующей пример корреляции между температурой окружающего воздуха и коэффициентом сопротивления качению. Как проиллюстрировано на фиг. 18, существует такая тенденция, что коэффициент сопротивления качению шины транспортного средства увеличивается по мере того, как температура окружающего воздуха понижается, и коэффициент сопротивления качению шины уменьшается по мере того, как температура окружающего воздуха повышается. По этой причине, например, корреляция между температурой окружающего воздуха и коэффициентом сопротивления качению, как проиллюстрировано на фиг. 18, сохраняется в качестве карты управления в форме таблицы. Соответственно, модуль 230 вычисления коэффициентов сопротивления качению может вычислять коэффициент сопротивления качению из температуры окружающего воздуха посредством обращения к карте управления в форме таблицы. Дополнительно, в качестве другой конфигурации, корреляция между температурой окружающего воздуха и коэффициентом сопротивления качению сохраняется в качестве функции. Затем модуль 230 вычисления коэффициентов сопротивления качению может вычислять коэффициент сопротивления качению из температуры окружающего воздуха. Альтернативно, в качестве другой конфигурации, модуль 230 вычисления коэффициентов сопротивления качению вычисляет коэффициент коррекции сопротивления качению из температуры окружающего воздуха на основе корреляции между температурой окружающего воздуха и коэффициентом коррекции сопротивления качению для коррекции коэффициента сопротивления качению. Затем модуль 230 вычисления коэффициентов сопротивления качению корректирует коэффициент сопротивления качению посредством коэффициента коррекции сопротивления качению. Соответственно, модуль 230 вычисления коэффициентов сопротивления качению может вычислять коэффициент сопротивления качению.
[0096] Возникает случай, когда корреляция между температурой окружающего воздуха и коэффициентом сопротивления качению различается в соответствии с типом транспортных средств или оборудованием транспортных средств (например, типом приводном механизме или шины). В этом случае, модуль 230 вычисления коэффициентов сопротивления качению может вычислять коэффициент сопротивления качению из температуры окружающего воздуха посредством обращения к корреляции между температурой окружающего воздуха и коэффициентом сопротивления качению в соответствии с типом транспортных средств или оборудованием транспортных средств. Дополнительно, в качестве другой конфигурации, коэффициент коррекции сопротивления качению сохраняется заранее в соответствии с типом транспортных средств или оборудованием транспортных средств. Затем модуль 230 вычисления коэффициентов сопротивления качению получает коэффициент коррекции сопротивления качению в соответствии с типом транспортных средств или оборудованием транспортных средств. Соответственно, модуль 230 вычисления коэффициентов сопротивления качению может вычислять коэффициент сопротивления качению на основе коэффициента коррекции сопротивления качению.
[0097] Дополнительно, модуль 150 вычисления коэффициентов коррекции согласно второму варианту осуществления вычисляет коэффициент коррекции потерь с учетом температуры окружающего воздуха, полученной посредством модуля 210 получения температуры окружающего воздуха. Фиг. 19 является графиком, иллюстрирующим пример корреляции сопротивления качению, средней скорости транспортного средства и коэффициента коррекции потерь. Как описано выше, сопротивление качению изменяется в ответ на температуру окружающего воздуха. По этой причине, модуль 150 вычисления коэффициентов коррекции прогнозирует сопротивление качению в ответ на температуру окружающего воздуха. Затем модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент коррекции потерь на основе прогнозного сопротивления качению и средней скорости Vave транспортного средства. В частности, модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент коррекции потерь в качестве небольшого значения по мере того, как возрастает сопротивление качению (или уменьшается температура окружающего воздуха) при идентичной средней скорости Vave транспортного средства.
[0098] Дополнительно, модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент коррекции потерь с учетом информации транспортного средства, полученной посредством модуля 220 получения информации транспортного средства. Фиг. 20 является схемой, иллюстрирующей пример коэффициента коррекции потерь для каждого типа транспортных средств. Поскольку информация транспортного средства, такая как вес транспортного средства, за исключением веса пассажиров, сопротивление на ступице тормоза вследствие торможения, коэффициент сопротивления воздуха и общая расчетная площадь поверхности, различается в соответствии с каждым типом транспортных средств, сопротивление движению различается в соответствии с типом транспортных средств. По этой причине, как проиллюстрировано на фиг. 20, модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент коррекции потерь в соответствии с типом транспортных средств на основе информации транспортного средства, полученной посредством модуля 220 получения информации транспортного средства, так что коэффициент коррекции потерь меньше в типе транспортных средств, имеющих более высокое сопротивление движению. Например, в примере, проиллюстрированном на фиг. 20, сопротивление движению является высоким в порядке транспортного средства C, транспортного средства B и транспортного средства A. В этом случае, как проиллюстрировано на фиг. 20, коэффициент коррекции потерь вычисляется как большое значение в порядке транспортного средства A, транспортного средства B и транспортного средства C.
[0099] Дополнительно, модуль 130 прогнозирования энергопотребления согласно второму варианту осуществления прогнозирует энергопотребление от текущей позиции до пункта назначения посредством коэффициента коррекции потерь, вычисленного посредством модуля 150 вычисления коэффициентов коррекции. Дополнительно, во втором варианте осуществления, модуль 130 прогнозирования энергопотребления вычисляет сопротивление Fa воздуха посредством использования параметра, связанного с сопротивлением воздуха, который включает в себя температуру окружающего воздуха и информацию транспортного средства. Затем модуль 130 прогнозирования энергопотребления прогнозирует энергопотребление от текущей позиции до пункта назначения на основе вычисленного сопротивления воздуха.
[0100] Далее описывается процесс или последовательность для прогнозирования энергопотребления согласно второму варианту осуществления со ссылкой на фиг. 21 и 22. Фиг. 21 и 22 являются блок-схемами последовательности операций способа, иллюстрирующими процесс или последовательность для прогнозирования энергопотребления согласно второму варианту осуществления. Например, процесс также выполняется таким образом, что пассажир вводит пункт назначения через устройство 200 ввода.
[0101] На этапе S201 и этапе S202, выполняются процессы, идентичные процессам на этапе S101 и этапе S102 первого варианта осуществления. Иными словами, выполняется поиск рекомендуемого маршрута от текущей позиции до пункта назначения (этап S201). Затем получается информация дороги искомого рекомендуемого маршрута (этап S202).
[0102] На этапе S203, температура окружающего воздуха за пределами транспортного средства получается посредством модуля 210 получения температуры окружающего воздуха устройства 100 управления. Например, модуль 210 получения температуры окружающего воздуха получает информацию температуры окружающего воздуха из термометра, смонтированного в транспортном средстве. Альтернативно, модуль 210 получения температуры окружающего воздуха прогнозирует температуру окружающего воздуха за пределами транспортного средства на основе комбинации по меньшей мере одного или более из времени года, месяца, даты, региона участка движения, а также широты и долготы участка движения в текущий момент времени. Соответственно, модуль 210 получения температуры окружающего воздуха может получать температуру окружающего воздуха за пределами транспортного средства.
[0103] На этапе S204, информация транспортного средства получается посредством модуля 220 получения информации транспортного средства устройства 100 управления. В частности, модуль получения информации транспортного средства получает информацию транспортного средства, включающую в себя вес транспортного средства, сопротивление на ступице тормоза вследствие торможения, коэффициент сопротивления воздуха и общую расчетную площадь поверхности, из запоминающего устройства для устройства 100 управления.
[0104] На этапе S205, коэффициент сопротивления качению вычисляется посредством модуля 230 вычисления коэффициентов сопротивления качению устройства 100 управления. Например, модуль 230 вычисления коэффициентов сопротивления качению может вычислять коэффициент μ сопротивления качению на основе температуры окружающего воздуха, полученной на этапе S203 посредством обращения к корреляции между коэффициентом сопротивления качению и температурой окружающего воздуха, проиллюстрированной на фиг. 18. Затем на следующем этапе S206 интегральное значение сопротивления Fr качению целевого участка вычисляется на основе коэффициента μ сопротивления качению, вычисленного на этапе S205, аналогично этапу S104 первого варианта осуществления. Как проиллюстрировано в формуле (4), сопротивление Fr качению является пропорциональным коэффициенту μ сопротивления качению, и значение сопротивления Fr качению увеличивается по мере того, как значение коэффициента μ сопротивления качению повышается. По этой причине, по мере того, как температура окружающего воздуха понижается, коэффициент μ сопротивления качению становится больше, и сопротивление Fr качению также повышается.
[0105] На этапе S207, определяется то, является или нет целевой участок наклонным, аналогично этапу S103 первого варианта осуществления. Когда целевой участок не является наклонным, процедура переходит к этапу S208. На этапе S208, коэффициент α коррекции сопротивления воздуха целевого участка вычисляется на основе средней скорости Vave транспортного средства целевого участка и функции f1 вычисления коэффициентов коррекции ненаклонного участка движения, аналогично этапу S105 первого варианта осуществления. С другой стороны, когда целевой участок является наклонным, процедура переходит к этапу S209. На этапе S209, сопротивление Fi при движении по уклону целевого участка вычисляется аналогично этапу S106 первого варианта осуществления. На следующем этапе S210 коэффициент α коррекции сопротивления воздуха целевого участка вычисляется на основе функции f2 вычисления коэффициентов коррекции наклонного участка движения, средней скорости Vave транспортного средства целевого участка и наклону θ обрабатываемого целевого участка, аналогично этапу S108 первого варианта осуществления.
[0106] На этапе S211, интегральное значение сопротивления Fa воздуха целевого участка вычисляется посредством модуля 130 прогнозирования энергопотребления. В частности, во втором варианте осуществления, модуль 130 прогнозирования энергопотребления вычисляет интегральное значение сопротивления Fa воздуха на основе формулы (16), как пояснено ниже.
Формула 15
Интегральное значение сопротивления FA воздуха=k'V2*d (16)
В формуле (16), k' указывает параметр, связанный с сопротивлением воздуха. Параметр k' задается в ответ на температуру окружающего воздуха, полученную на этапе S203, или информацию транспортного средства, такую как вес транспортного средства, сопротивление на ступице тормоза вследствие торможения, коэффициент сопротивления воздуха и общая расчетная площадь поверхности, полученную на этапе S204. Дополнительно, в формуле (16), V указывает среднюю скорость транспортного средства на целевом участке, полученную на этапе S202. В формуле (16), d указывает проезжаемое расстояние целевого участка.
[0107] На этапе S212, интегральное значение сопротивления Fa воздуха целевого участка корректируется на основе коэффициента α коррекции сопротивления воздуха, вычисленного на этапе S208 или этапе S210, и интегрального значения сопротивления Fa воздуха, вычисленного на этапе S211, аналогично этапу S110 первого варианта осуществления.
[0108] Затем, как проиллюстрировано на фиг. 22, на этапе S213 определяется то, является или нет целевой участок наклонным, аналогично этапу S207. Когда целевой участок не является наклонным, процедура переходит к этапу S214. С другой стороны, когда целевой участок является наклонным, процедура переходит к этапу S215.
[0109] На этапе S214, коэффициент коррекции потерь целевого участка вычисляется посредством модуля 150 вычисления коэффициентов коррекции. Во втором варианте осуществления, модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент коррекции потерь целевого участка с учетом температуры окружающего воздуха, полученной на этапе S203, и информации транспортного средства, полученной на этапе S204. В частности, модуль 150 вычисления коэффициентов коррекции сохраняет функцию f5 ненаклонного участка движения в модуле 140 хранения коэффициентов коррекции. Как проиллюстрировано на фиг. 19 и 20, функция f5 указывает корреляцию между средней скоростью Vave транспортного средства и коэффициентом β коррекции потерь и соответствует сопротивлению качению и типу транспортных средств. Как пояснено ниже, модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент β коррекции потерь ненаклонного участка движения. Коэффициент β коррекции потерь соответствует сопротивлению качению, типу транспортных средств и средней скорости Vave транспортного средства в текущий момент времени. Модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент β коррекции потерь на основе информации k'' транспортного средства, температуры t окружающего воздуха и средней скорости Vave транспортного средства целевого участка, как проиллюстрировано в формуле (17).
формула 16
Коэффициент β коррекции потерь=f5(Vave, t, k'') (17)
Дополнительно, способ для вычисления коэффициента β коррекции потерь не ограничен формулой (17). Например, коэффициент β коррекции потерь может вычисляться посредством сопротивления качению, вычисленного на этапе S205.
[0110] На этапе S213, когда определено, что целевой участок является наклонным, процедура переходит к этапу S215. Даже в этом случае, модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент коррекции потерь целевого участка с учетом температуры окружающего воздуха, полученной на этапе S203, и информации транспортного средства, полученной на этапе S204. В частности, модуль 150 вычисления коэффициентов коррекции сохраняет функцию f6 наклонного участка движения в модуле 140 хранения коэффициентов коррекции. Как проиллюстрировано на фиг. 19 и 20, функция f6 указывает корреляцию между средней скоростью Vave транспортного средства и коэффициентом β коррекции потерь и соответствует сопротивлению качению и типу транспортных средств. Как пояснено ниже, модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент β коррекции потерь для наклонного участка движения. Коэффициент β коррекции потерь соответствует текущему сопротивлению качению, типу транспортных средств, наклону θ и средней скорости Vave транспортного средства. Модуль 150 вычисления коэффициентов коррекции вычисляет коэффициент β коррекции потерь на основе информации k'' транспортного средства, температуры t окружающего воздуха, наклона θ и средней скорости Vave транспортного средства целевого участка, как проиллюстрировано в формуле (18).
Формула 17
Коэффициент β коррекции потерь=f6(Vave, θ, t, k'') (18)
[0111] На этапах S216-S222 выполняются процессы, идентичные процессам на этапах S114-S120 первого варианта осуществления. Иными словами, интегральное значение потерь в приводном механизме целевого участка вычисляется на основе сопротивления качению, вычисленного на этапе S206, и сопротивления воздуха, скорректированного на этапе S212 (этапе S216). Потери L в приводном механизме целевого участка корректируются на основе коэффициента β коррекции потерь, вычисленного на этапе S214 или этапе S215, и интегрального значения потерь L в приводном механизме, вычисленного на этапе S216 (этапе S217).
[0112] Затем, когда процессы на этапах S203-S217 выполняются на всех участках движения на рекомендуемом маршруте ("Да" на этапе S218), прогнозируется энергопотребление от текущей позиции до пункта назначения (этап S219). Определяется то, должен или нет быть заряжен аккумулятор к тому времени, когда транспортное средство достигает пункта назначения, на основе прогнозного энергопотребления до пункта назначения (этап S220). Когда определяется то, что аккумулятор должен быть заряжен, выполняется поиск зарядной станции около транспортного средства (этап S221). Затем, информация, включающая в себя энергопотребление до пункта назначения, отображается на дисплее 500 пассажиру (этап S222).
[0113] Как описано выше, навигационное устройство 1 второго варианта осуществления получает температуру окружающего воздуха и информацию транспортного средства. Навигационное устройство 1 вычисляет коэффициент сопротивления качению и коэффициент коррекции потерь с учетом температуры окружающего воздуха и информации транспортного средства. Затем навигационное устройство 1 прогнозирует энергопотребление от текущей позиции до пункта назначения посредством использования коэффициента сопротивления качению и коэффициента коррекции потерь. Соответственно, навигационное устройство 1 второго варианта осуществления может прогнозировать энергопотребление с учетом температуры окружающего воздуха и типа транспортных средств (или оборудования транспортных средств) в дополнение к преимуществу первого варианта осуществления. Как результат, можно с высокой точностью прогнозировать энергопотребление.
[0114] Фиг. 23 является схемой, иллюстрирующей пример фактического энергопотребления и прогнозного энергопотребления без учета температуры окружающего воздуха. На фиг. 23, горизонтальная ось указывает фактическое энергопотребление. Вертикальная ось указывает число (частоту) транспортных средств в расчете на каждое фактическое энергопотребление. Фиг. 23 иллюстрирует среднее прогнозного энергопотребления транспортных средств и диапазон прогнозирования в ±10% относительно среднего. Как проиллюстрировано на фиг. 23, когда энергопотребление прогнозируется без учета температуры окружающего воздуха, транспортное средство, фактическое энергопотребление которого попадает в диапазон прогнозирования энергопотребления, составляет в общем приблизительно 67%.
[0115] Наоборот, фиг. 24 является схемой, иллюстрирующей пример прогнозного энергопотребления с учетом фактического энергопотребления и температуры окружающего воздуха. Дополнительно, на фиг. 24, горизонтальная ось указывает фактическое энергопотребление аналогично фиг. 23. Вертикальная ось указывает число (частоту) транспортных средств в расчете на каждое фактическое энергопотребление. Фиг. 24 также иллюстрирует среднее прогнозного энергопотребления и диапазон прогнозирования ±10% относительно среднего. Как проиллюстрировано на фиг. 24, когда энергопотребление прогнозируется с учетом температуры окружающего воздуха, транспортное средство, фактическое энергопотребление которого попадает в диапазон прогнозирования, составляет 90% или более в четыре времени года. Таким образом, когда энергопотребление прогнозируется с учетом температуры окружающего воздуха, можно с высокой точностью прогнозировать энергопотребление по сравнению со случаем, в котором энергопотребление прогнозируется без учета температуры окружающего воздуха, как проиллюстрировано на фиг. 23.
[0116] Дополнительно, во втором варианте осуществления, когда температура окружающего воздуха прогнозируется на основе комбинации времени года, месяца, даты, региона участка движения, а также широты и долготы участка движения, температура окружающего воздуха прогнозируется в меньшем температурном интервале по мере того, как температура окружающего воздуха понижается. Фиг. 25 является схемой, иллюстрирующей пример прогнозированного значения температуры окружающего воздуха, которая необходима для большей части фактического энергопотребления, попадающего в диапазон прогнозирования, как проиллюстрировано на фиг. 24. Сопротивление качению увеличивается по мере того, как температура окружающего воздуха понижается. По этой причине, для того чтобы задавать фактическое энергопотребление в диапазоне прогнозирования, необходимо иметь более высокую точность прогнозирования температуры окружающего воздуха (иметь меньший температурный интервал прогнозирования) по мере того, как температура окружающего воздуха понижается, как проиллюстрировано на фиг. 25. В варианте осуществления, как проиллюстрировано на фиг. 25, точность прогнозирования температуры окружающего воздуха повышается по мере того, как температура окружающего воздуха понижается. Соответственно, можно с высокой точностью вычислять сопротивление качению на основе температуры окружающего воздуха.
[0117] Дополнительно, во втором варианте осуществления, как проиллюстрировано на фиг. 19, коэффициент коррекции потерь, соответствующий сопротивлению качению, вычисляется на основе температуры окружающего воздуха. Существует такая тенденция, что эффективность работы электромотора, вызываемая посредством ускорения и замедления, является небольшой, когда сопротивление качению является высоким. По этой причине, поскольку коэффициент коррекции потерь уменьшается по мере того, как сопротивление качению является более высоким, можно с высокой точностью прогнозировать потери в приводном механизме на целевом участке. Как результат, можно с высокой точностью прогнозировать энергопотребление.
[0118] Дополнительно, в варианте осуществления, как проиллюстрировано на фиг. 20, коэффициент коррекции потерь, соответствующий типу транспортных средств, вычисляется на основе информации транспортного средства. Фиг. 26 является схемой, иллюстрирующей разность в энергопотреблении в соответствии с типом транспортных средств. Например, возникает случай, когда вес транспортного средства (вес транспортного средства, за исключением веса пассажиров), сопротивление на ступице тормоза вследствие торможения, коэффициент сопротивления воздуха и расчетная площадь различаются в соответствии с типом транспортных средств. Кроме того, возникает случай, когда сопротивление движению различается в соответствии с типом транспортных средств. По этой причине, когда энергопотребление прогнозируется без учета информации транспортного средства, возникает случай, когда ошибка приблизительно в ±3% возникает в соответствии с типом транспортных средств, как проиллюстрировано на фиг. 26. В варианте осуществления, поскольку коэффициент коррекции потерь, соответствующий типу транспортных средств, вычисляется с учетом информации транспортного средства, можно уменьшать такую ошибку. Как результат, можно с высокой точностью прогнозировать энергопотребление.
[0119] Вышеописанные варианты осуществления используются для простого понимания изобретения и не ограничивают изобретение. Таким образом, компоненты, раскрытые в вышеописанных вариантах осуществления, включают в себя все модификации проектных решений или эквиваленты, которые принадлежат объему изобретения.
[0120] Например, в вышеописанных вариантах осуществления, навигационное устройство 1, смонтированное на электромобиле, описано в качестве примера для настоящего изобретения. Тем не менее, настоящее изобретение не ограничено этой конфигурацией. Например, устройство для прогнозирования энергопотребления может быть выполнено с возможностью монтироваться на гибридном транспортном средстве, на транспортном средстве с двигателем или на системе, отличной от транспортного средства. Например, когда настоящее изобретение применяется к транспортному средству с двигателем, можно надлежащим образом прогнозировать потребление нефтяного топлива до пункта назначения на основе интегрального значения сопротивления воздуха до пункта назначения и интегрального значения потерь в приводном механизме, к примеру, в электромоторе или в зубчатой передаче.
[0121] Дополнительно, в вышеописанных вариантах осуществления, проиллюстрирована конфигурация вычисления интегрального значения сопротивления воздуха или интегрального значения потерь в приводном механизме посредством использования средней скорости Vave транспортного средства на участке движения. Тем не менее, может использоваться конфигурация с использованием предельной скорости участка движения вместо средней скорости Vave транспортного средства на участке движения. Дополнительно, может использоваться конфигурация с использованием средней скорости транспортного средства на идентичном виде участка движения (например, на улице или в пригороде) вместо средней скорости Vave транспортного средства на участке движения.
[0122] Дополнительно, модуль 110 получения картографической информации вышеописанных вариантов осуществления соответствует модулю получения настоящего изобретения. Модуль 150 вычисления коэффициентов коррекции и модуль 130 прогнозирования энергопотребления вышеописанных вариантов осуществления, соответственно, соответствуют модулю вычисления сопротивления воздуха и модулю вычисления потерь настоящего изобретения. Модуль 130 прогнозирования энергопотребления вышеописанных вариантов осуществления соответствует модулю прогнозирования энергопотребления настоящего изобретения. Модуль 230 вычисления коэффициентов сопротивления качению вышеописанных вариантов осуществления соответствует модулю вычисления сопротивления качению настоящего изобретения.
ОПИСАНИЕ ССЫЛОЧНЫХ ПОЗИЦИЙ
[0123] 1 - навигационное устройство
100 - устройство управления
110 - модуль получения картографической информации
120 - модуль поиска рекомендуемого маршрута
130 - модуль прогнозирования энергопотребления
140 - модуль хранения коэффициентов коррекции
150 - модуль вычисления коэффициентов коррекции
160 - модуль определения необходимости заряда
170 - модуль поиска зарядной станции
180 -модуль отображения
210 - модуль получения температуры окружающего воздуха
220 - модуль получения информации транспортного средства
230 - модуль вычисления коэффициентов сопротивления качению
200 - устройство ввода
300 - устройство определения позиции рассматриваемого транспортного средства
400 - картографическая база данных
500 - дисплей
Реферат
Изобретение относится к области к автотранспорта, в частности к прогнозированию энергопотребления/расхода топлива при движении транспортного средства. Технический результат заключается в повышении эффективности прогнозирования энергопотребления. Предложено устройство прогнозирования энергопотребления, содержащее: модуль (110) получения, модуль (140, 150) вычисления сопротивления воздуха и модуль (130) прогнозирования энергопотребления. Модуль (110) получения выполнен с возможностью получать информацию дороги, включающую в себя информацию скорости движения, заданную для каждого маршрута. Модуль (140, 150) вычисления сопротивления воздуха выполнен с возможностью вычислять сопротивление воздуха в качестве вычисленного значения сопротивления воздуха посредством формулы вычисления сопротивления воздуха на основе информации скорости движения запланированного маршрута движения и корректировать вычисленное значение сопротивления воздуха так, что сопротивление воздуха увеличивается по мере того, как скорость движения по запланированному маршруту движения понижается. Сопротивление воздуха возникает, когда транспортное средство движется по запланированному маршруту движения. Модуль (130) прогнозирования энергопотребления выполнен с возможностью прогнозировать энергопотребление запланированного маршрута движения на основе скорректированного значения сопротивления воздуха. 2 н. и 9 з.п. ф-лы, 26 ил.
Комментарии