Способ оценки транспортного средства, способ корректировки маршрута движения, устройство оценки транспортного средства и устройство корректировки маршрута движения - RU2735720C1
Код документа: RU2735720C1
Чертежи
Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу определения транспортного средства, способу корректировки маршрута движения, устройству определения транспортного средства и устройству корректировки маршрута движения.
Уровень техники
[0002] На данный момент известен способ помощи в управлении боковым движением моторных транспортных средств (патентный документ 1: перевод международной заявки PCT на японский язык № 2005-524135A). В этом способе границы полосы движения и фактическое положение транспортного средства относительно границ обнаруживаются с помощью сенсорного устройства, и выходной сигнал вычисляется таким образом, что отклонение между целевым значением и фактическим значением поперечного положения транспортного средства уменьшается. Этот способ включает в себя обнаружение другого транспортного средства на соседней полосе движения по отношению к полосе движения, определенной границами, и изменение целевого значения в соответствии с измеренными данными положения другого транспортного средства.
Документ из уровня техники
Патентный документ
[0003] Патентный документ 1
Перевод международной заявки PCT на японский язык № 2005-524135A
Раскрытие изобретения
Проблемы, решаемые изобретением
[0004] Однако, вышеописанный предшествующий уровень техники имеет проблему в том, что присутствие или отсутствие другого транспортного средства не может быть определено, если границы полосы движения не могут быть обнаружены посредством устройства датчика.
[0005] Проблемой, которая должна быть решена настоящим изобретением, является создание способа и устройства, с помощью которых может быть определено присутствие или отсутствие другого транспортного средства даже в ситуации, в которой обнаружение полосы движения является затруднительным.
Средство для решения проблемы
[0006] Настоящее изобретение решает вышеописанную проблему посредством вычисления маршрута движения транспортного средства-носителя, обнаружения другого транспортного средства, находящегося в перпендикулярном направлении по отношению к касательному направлению маршрута движения, и определения присутствия или отсутствия другого транспортного средства, находящегося сбоку по отношению к транспортному средству-носителю, на основании положения обнаруженного другого транспортного средства.
Преимущества изобретения
[0007] Согласно настоящему изобретению может быть получен результат, состоящий в возможности определения присутствия или отсутствия другого транспортного средства, находящегося сбоку по отношению к транспортному средству-носителю.
Краткое описание чертежей
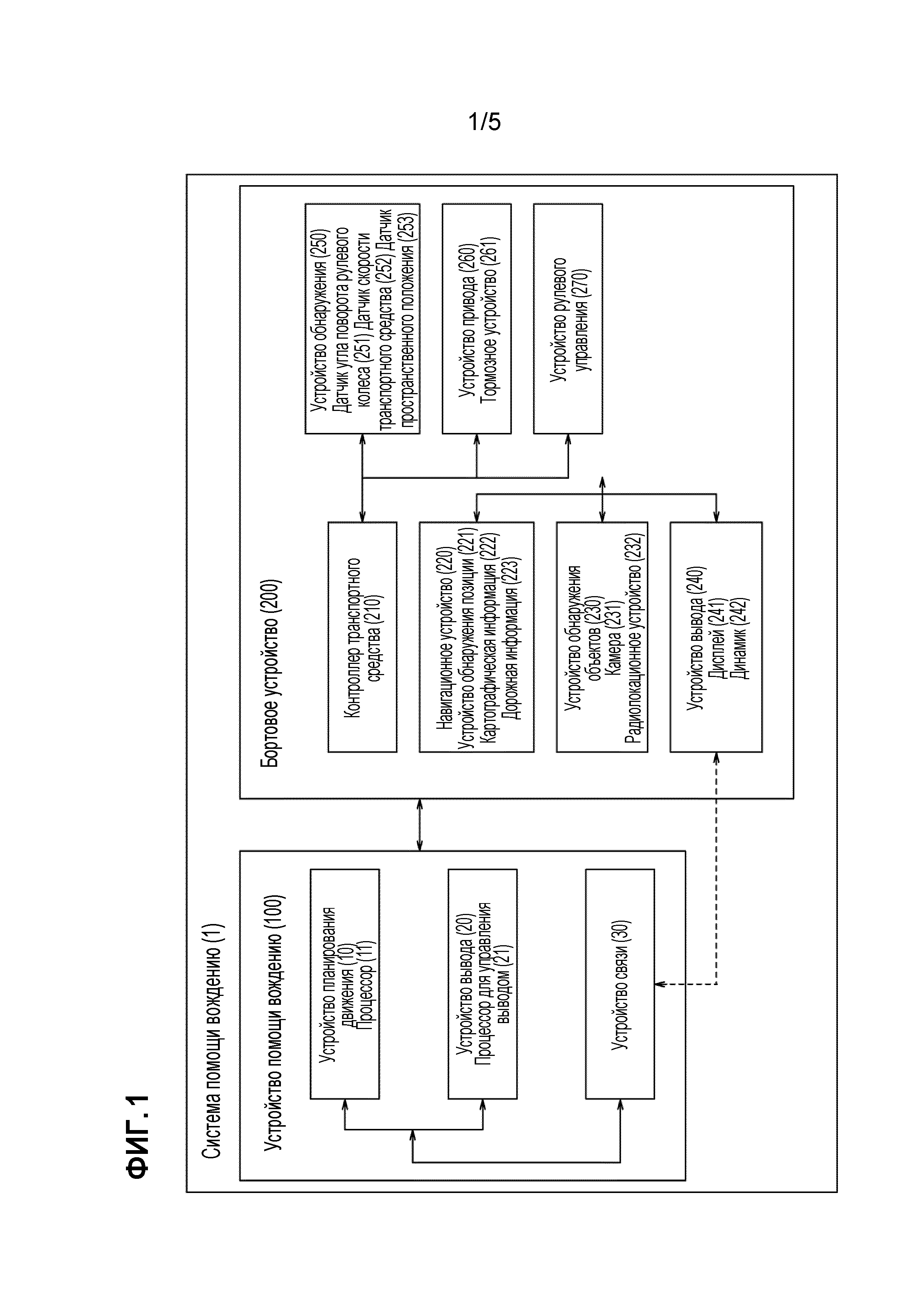
[0008] Фиг. 1 - это блок-схема, иллюстрирующая систему помощи в управлении согласно одному или более вариантам осуществления настоящего изобретения.
Фиг. 2 - это схема для описания области определения транспортного средства.
Фиг. 3 - это схема для описания областей определения транспортного средства.
Фиг. 4 - это схема для описания процесса корректировки маршрута движения.
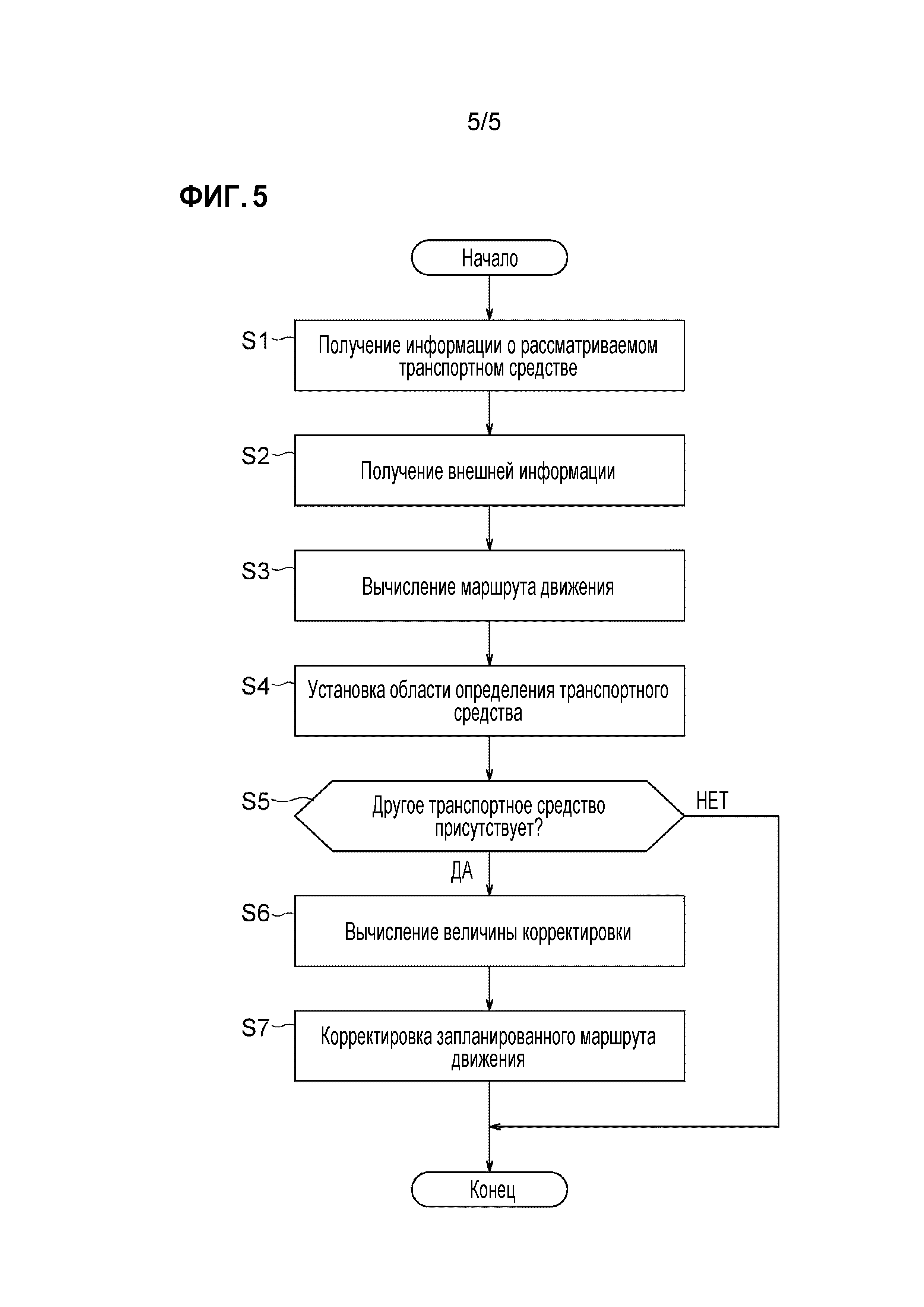
Фиг. 5 - это блок-схема, иллюстрирующая процесс управления процессора, иллюстрированного на фиг. 1.
Осуществление изобретения
[0009] Ниже описаны один или более вариантов осуществления настоящего изобретения со ссылками на чертежи.
Первый вариант осуществления
[0010] Вариант осуществления настоящего изобретения будет описан ниже со ссылкой на чертежи. В настоящем варианте осуществления будет описан примерный случай, в котором устройство определения транспортного средства или устройство корректировки маршрута движения согласно настоящему изобретению применяется к системе помощи в управлении, которая взаимодействует с бортовым оборудованием 200, оборудованным в транспортном средстве.
[0011] Фиг. 1 - это схема, иллюстрирующая конфигурацию блоков системы 1 помощи в управлении. Система 1 помощи в управлении по настоящему варианту осуществления содержит оборудование 100 помощи в управлении и бортовое оборудование 200. Оборудование 100 помощи в управлении настоящего изобретения не ограничивается в своей форме осуществления и может быть оборудовано в транспортном средстве или может также быть применено к переносному терминальному устройству, которое выполнено с возможностью обмена информацией с бортовым оборудованием 200. Примеры такого терминального устройства включают в себя оборудование, такое как смартфон или КПК. Система 1 помощи в управлении, оборудование 100 помощи в управлении, бортовое оборудование 200 и различные устройства, состоящие из них, могут, каждое, быть компьютером, который включает в себя блок арифметической обработки, такой как один или более CPU, и выполняет арифметическую обработку.
[0012] Сначала будет описано бортовое оборудование 200.
Бортовое оборудование 200 по настоящему варианту осуществления содержит контроллер 210 транспортного средства, навигационное устройство 220, устройство 230 обнаружения объектов и устройство 240 вывода. Эти устройства, которые составляют бортовое оборудование 200, соединены друг с другом локальной сетью контроллеров (CAN) или другой бортовой LAN, чтобы взаимно обмениваться информацией. Бортовое оборудование 200 может обмениваться информацией с оборудованием 100 помощи в управлении через такую бортовую LAN. Контроллер 210 транспортного средства управляет устройством 250 обнаружения, устройством 260 привода и устройством 270 рулевого управления.
[0013] Контроллер 210 транспортного средства настоящего варианта осуществления снабжается устройством 250 обнаружения. Устройство 250 обнаружения имеет датчик 251 угла поворота рулевого колеса, датчик 252 скорости транспортного средства и датчик 253 пространственного положения. Датчик 251 угла поворота рулевого колеса обнаруживает информацию о величине руления, скорости руления, ускорении руления и т.п. и выводит результаты обнаружения в контроллер 210 транспортного средства. Датчик 252 скорости транспортного средства обнаруживает скорость и/или ускорение транспортного средства и выводит результаты обнаружения в контроллер 210 транспортного средства. Датчик 253 пространственного положения обнаруживает положение транспортного средства, угол наклона относительно поперечной оси транспортного средства, угол поворота вокруг вертикальной оси транспортного средства и угол наклона относительно продольной оси транспортного средства и выводит результаты обнаружения в контроллер 210 транспортного средства. Датчик 253 пространственного положения включает в себя гиродатчик.
[0014] Контроллер 210 транспортного средства настоящего варианта осуществления, который является бортовым компьютером, таким как электронный блок управления (ECU), электронным образом управляет движением транспортного средства. Транспортное средство может быть, например, электрическим автомобилем, имеющим электромотор в качестве источника приведения в движение, автомобилем с двигателем, имеющим двигатель внутреннего сгорания в качестве источника приведения в движение, или гибридным автомобилем, имеющим и электромотор, и двигатель внутреннего сгорания в качестве источников приведения в движение. Примеры электрического автомобиля или гибридного автомобиля, имеющих электромотор в качестве источника приведения в движение, включают в себя автомобили типа, в котором источник мощности для электромотора является аккумуляторной батареей, и типа, в котором источник мощности для электромотора является топливным элементом.
[0015] Устройство 260 привода настоящего варианта осуществления включает в себя механизм привода транспортного средства-носителя V1. Механизм привода включает в себя электромотор и/или двигатель внутреннего сгорания в качестве вышеописанных источников приведения в движение, устройство передачи мощности, включающее в себя вал привода и автоматическую трансмиссию, которая передает выходную мощность от источника приведения в движение или источников к ведущим колесам, тормозное устройство 261, которое тормозит колеса, и другие необходимые компоненты. Устройство 260 привода выполняет управление движением, которое включает в себя ускорение и замедление транспортного средства, посредством формирования управляющих сигналов для механизма привода на основании входных сигналов посредством срабатывания акселератора и срабатывания тормоза и управляющих сигналов, полученных от контроллера 210 транспортного средства или оборудования 100 помощи в управлении. Управление движением, включающее в себя ускорение и замедление транспортного средства, может выполняться автоматическим или автономным образом посредством передачи управляющей информации устройству 260 привода. В случае гибридного автомобиля, отношение крутящего момента, выводимого на электромотор, и крутящего момента, выводимого на двигатель внутреннего сгорания, в соответствии с состоянием движения транспортного средства также передается устройству 260 привода.
[0016] Устройство 270 рулевого управления настоящего варианта осуществления включает в себя исполнительный механизм рулевого управления. Исполнительный механизм рулевого управления включает в себя мотор и другие необходимые компоненты, соединенные с валом рулевой колонки. Устройство 270 рулевого управления выполняет управление для изменения направления движения транспортного средства на основании управляющих сигналов, полученных от контроллера 210 транспортного средства, или входных сигналов посредством действия руления. Контроллер 210 транспортного средства передает управляющую информацию, которая включает в себя величину руления, устройству 270 рулевого управления, чтобы, таким образом, выполнять руление транспортным средством-носителем, так что транспортное средство-носитель движется по маршруту движения. В качестве дополнения или альтернативы, оборудование 100 помощи в управлении может выполнять управление направлением движения транспортного средства, управляя величиной торможения для каждого колеса транспортного средства. В этом случае, контроллер 210 транспортного средства передает управляющую информацию, которая включает в себя величину торможения для каждого колеса, тормозному устройству 261, чтобы, таким образом, выполнять управление направлением движения транспортного средства. Управление устройством 260 привода и/или управление устройством 270 рулевого управления может выполняться полностью автоматическим или автономным образом или в форме помощи операции управления (действию движения) водителя. Управление устройством 260 привода и управление устройством 270 рулевого управления может быть приостановлено/отменено посредством действия вмешательства водителя. Контроллер 210 транспортного средства управляет движением транспортного средства-носителя в соответствии с планом движения, созданным посредством устройства 10 планирования маршрута.
[0017] Бортовое оборудование 200 настоящего варианта осуществления включает в себя навигационное устройство 220. Навигационное устройство 220 вычисляет маршрут из текущего положения транспортного средства-носителя до пункта назначения. Схема вычисления маршрута может быть известной на момент подачи настоящей заявки схемой на основании алгоритма поиска по графу, такого как алгоритм Дейкстры или алгоритм A*-поиска. Вычисленный маршрут передается контроллеру 210 транспортного средства для использования в помощи в управлении для транспортного средства-носителя. Вычисленный маршрут также выводится в качестве направляющей информации по маршруту через устройство 240 вывода, которое будет описано позже.
Навигационное устройство 220 включает в себя устройство 221 обнаружения положения. Устройство 221 обнаружения положения отвечает системе глобального позиционирования (GPS) и обнаруживает положение движения (широту/долготу) движущегося транспортного средства.
[0018] Навигационное устройство 220 включает в себя доступную картографическую информацию 222 и дорожную информацию 223. Достаточно, чтобы картографическая информация 222 и дорожная информация 223 могли быть считаны навигационным устройством 220. Картографическая информация 222 и дорожная информация 223 могут быть сохранены в базе данных, выполненной с возможностью быть физически отдельной от навигационного устройства 220, или могут быть сохранены на сервере, с которого сохраненная информация может считываться через устройство 30 связи (или устройство связи, предусмотренное в бортовом оборудовании 200).
Картографическая информация 222 является так называемой электронной картой, которая представляет информацию, в которой широта и долгота ассоциированы с картографической информацией. Картографическая информация 222 имеет дорожную информацию 223, которая ассоциируется с каждой точкой.
[0019] Дорожная информация 223 определяется узлами и соединениями между узлами. Дорожная информация 223 включает в себя информацию для указания дороги по положению/области дороги, информацию о типе дороги и ширине дороги для каждой дороги, и информацию о форме дороги. Дорожная информация 223 хранится так, что идентификационная информация для каждого соединения дорог ассоциирована с положением перекрестка, направлением въезда на перекресток, типом перекрестка и другой информацией, относящейся к перекрестку. В качестве дополнения или альтернативы, дорожная информация 223 может быть сохранена таким образом, что идентификационная информация для каждого соединения дорог ассоциирована с типом дороги, шириной дороги, формой дороги, тем, разрешено или нет движение вперед, соотношением приоритета движения, тем, разрешен или нет обгон (разрешена или нет смена полосы на соседнюю полосу), и другой информацией, касающейся дороги.
[0020] Навигационное устройство 220 указывает маршрут движения, по которому транспортное средство-носитель движется, на основании текущего положения транспортного средства-носителя, обнаруженного посредством устройства 221 обнаружения положения. Маршрут движения является запланированным маршрутом движения для транспортного средства-носителя и/или маршрутом движения, по которому фактически движется транспортное средство-носитель. Маршрут движения может также быть маршрутом до пункта назначения, назначенного пользователем, или маршрутом до пункта назначения, рассчитанного на основании истории движения транспортного средства-носителя V1/пользователя. Маршрут движения, по которому движется транспортное средство-носитель, может быть указан для каждой дороги, указан для каждой дороги, на которой предусматривается входящее/исходящее направление, или указано для каждой отдельной полосы, по которой фактически движется транспортное средство-носитель. Навигационное устройство 220 обращается к дорожной информации 223, которая будет описана ниже, для указания соединения дорог для каждой полосы маршрута движения, по которому движется транспортное средство-носитель.
Маршрут движения включает в себя указывающую информацию (информацию о координатах) для одной или более точек, через которые транспортное средство-носитель V1 будет двигаться в будущем. Маршрут движения включает в себя по меньшей мере точку, которая подсказывает следующее положение движения, в которое движется транспортное средство-носитель. Маршрут движения может состоять из непрерывной линии или может также состоять из дискретных точек. Хотя это конкретно не ограничено, маршрут движения указывается посредством идентификатора дороги, идентификатора полосы движения и/или идентификатора соединения дорог. Эти идентификатор дороги, идентификатор полосы движения и идентификатор соединения дорог определяются в картографической информации 222 и/или дорожной информации 223.
[0021] Бортовое оборудование 200 включает в себя устройство 230 обнаружения объектов. Устройство 230 обнаружения объектов обнаруживает ситуацию вокруг транспортного средства-носителя. Устройство 230 обнаружения объектов транспортного средства-носителя обнаруживает наличие и существующие положения объектов, включающих в себя препятствия, которые могут иметься вокруг транспортного средства-носителя. Хотя это конкретно не ограничено, устройство 230 обнаружения объектов включает в себя камеру 231. Камера 231 является, например, устройством формирования изображения, содержащим элемент формирования изображения, такой как CCD. Камера 231 может быть инфракрасной камерой или стереокамерой. Камера 231 размещена в некотором положении транспортного средства-носителя и захватывает изображения объектов вокруг транспортного средства-носителя. Термин «вокруг транспортного средства-носителя» в контексте данного документа охватывает понятия «впереди транспортного средства-носителя», «позади транспортного средства-носителя», «сбоку по отношению к транспортному средству-носителю с левой стороны» и «сбоку по отношению к транспортному средству-носителю с правой стороны». Объекты включают в себя двухмерные знаки, такие как стоп-линии, нарисованные на поверхности дороги. Объекты включают в себя трехмерные объекты. Объекты включают в себя стационарные объекты, такие как дорожные знаки. Объекты включают в себя движущиеся объекты, такие как пешеходы, двухколесные транспортные средства и четырехколесные транспортные средства (другие транспортные средства). Объекты включают в себя дорожные структуры, такие как дорожные ограждения, разделительные полосы и бордюрные камни.
[0022] Устройство 230 обнаружения объектов может анализировать данные изображения и идентифицировать тип объекта на основании результата анализа. Устройство 230 обнаружения объектов использует метод соответствия образцу или т.п., чтобы идентифицировать то, является или нет объект, включенный в данные изображения, транспортным средством, пешеходом или дорожным знаком. Устройство 230 обнаружения объектов обрабатывает полученные данные изображения, чтобы получать расстояние от транспортного средства-носителя до объекта, существующего около транспортного средства-носителя, на основании положения объекта. В частности, устройство 230 обнаружения объектов получает относительное расположение объекта и транспортного средства-носителя.
[0023] Устройство 230 обнаружения объектов может включать в себя радарное устройство 232. Примеры радарного устройства 232 включают в себя такие устройства, как радар миллиметрового диапазона, лидар, ультразвуковой радар и лазерный дальномер, которые имеют схемы, известные на момент подачи настоящей заявки. Устройство 230 обнаружения объектов обнаруживает присутствие или отсутствие объектов, положения объектов и расстояния до объектов на основании принятых сигналов от радарного устройства 232. Устройство 230 обнаружения объектов может обнаруживать присутствие или отсутствие объектов, положения объектов и расстояния до объектов на основании результатов группирования информации об облаке точек, получаемой с помощью лидара.
[0024] Бортовое оборудование 200 включает в себя устройство 240 вывода. Устройство 240 вывода включает в себя дисплей 241 и динамик 242. Устройство 240 вывода выводит различные элементы информации, касающиеся помощи в управлении, пользователю или пользователям окружающих транспортных средств. Устройство 240 вывода выводит информацию, касающуюся подготовленного плана действий управления и управления движением на основании плана действий управления. Устройство 240 вывода заблаговременно информирует пользователей транспортного средства-носителя о том, что будут выполнены действие рулевым управлением и/или ускорение или замедление, через дисплей 241 и/или динамик 242, в качестве информации в соответствии с управляющей информацией для транспортного средства-носителя, чтобы двигаться по маршруту движения (целевому маршруту). В качестве дополнения или альтернативы, пользователи транспортного средства-носителя или пользователи других транспортных средств могут быть заблаговременно информированы о таких элементах информации, касающихся помощи в управлении, посредством внешних фонарей и/или внутренних ламп. В качестве дополнения или альтернативы, устройство 240 вывода может выводить различные элементы информации, касающиеся помощи в управлении, внешним устройствам интеллектуальных транспортных систем (ITS) и т.п. через устройство связи. Когда маршрут движения был скорректирован, устройство вывода может выводить информацию о том, что маршрут движения скорректирован, и информацию о скорректированном маршруте движения.
[0025] Оборудование 100 помощи в управлении будет описано далее.
Оборудование 100 помощи в управлении содержит устройство 10 планирования движения, устройство 20 вывода и устройство 30 связи. Устройство 20 вывода осуществляет те же функции, что и функции ранее описанного устройства 240 вывода бортового оборудования 200. Дисплей 241 и динамик 242 используются в качестве компонентов устройства 20 вывода. Устройство 10 планирования движения и устройство 20 вывода могут обмениваться информацией друг с другом по проводной или беспроводной линии связи. Устройство 30 связи выполняет обмен информацией с бортовым оборудованием 200, обмен информацией в оборудовании 100 помощи в управлении и обмен информацией с внешним устройством системы 1 помощи в управлении.
[0026] Устройство 10 планирования движения будет сначала описано.
Устройство 10 планирования движения включает в себя процессор 11, который служит в качестве устройства управления для устройства 10 планирования движения. Процессор 11 является вычислительным устройством, которое выполняет процесс определения другого транспортного средства, процесс корректировки маршрута движения и процесс помощи в управлении. Процесс определения другого транспортного средства включает в себя определение присутствия или отсутствия другого транспортного средства, находящегося сбоку по отношению к транспортному средству-носителю. Процесс корректировки маршрута движения включает в себя корректировку маршрута движения транспортного средства-носителя в соответствии с положением другого транспортного средства, находящегося сбоку по отношению к транспортному средству-носителю. Процесс помощи в управлении включает в себя выполнение помощи в управлении, так что транспортное средство-носитель движется по маршруту движения. Во время помощи в управлении маршрут движения включает в себя маршрут движения, представленный в подготовке плана движения, или маршрут движения, скорректированный в процессе корректировки. В частности, процессор 11 является компьютером, содержащим постоянное запоминающее устройство (ROM), которое хранит программы для выполнения процесса определения другого транспортного средства, процесса корректировки маршрута движения и процесса помощи в управлении, центральный процессор (CPU) в качестве операционной схемы, которая выполняет программы, сохраненные в ROM, чтобы служить в качестве устройства 10 планирования движения, и оперативное запоминающее устройство (RAM), которое служит в качестве доступного запоминающего устройства.
[0027] Процессор 11 согласно настоящему варианту осуществления выполняет следующие процессы:
(1) процесс вычисления маршрута движения, по которому движется транспортное средство-носитель, обнаружения другого транспортного средства, находящегося в перпендикулярном направлении к касательному направлению маршрута движения, и определения присутствия или отсутствия другого транспортного средства, находящегося сбоку по отношению к транспортному средству-носителю, на основании положения обнаруженного другого транспортного средства (процесс определения другого транспортного средства);
(2) процесс корректировки маршрута движения транспортного средства-носителя в соответствии с результатом определения, определенным посредством процесса определения другого транспортного средства (процесса корректировки маршрута движения); и
(3) процесс получения (обнаружения/извлечения) множества событий, встретившихся при движении по маршруту движения, и управления транспортным средством-носителем автоматическим или автономным образом для движения по маршруту движения с помощью соотношения между каждым извлеченным событием и транспортным средством-носителем (автоматический или автономный процесс управления).
[0028] Процессор 11 имеет первый блок, который реализует процесс определения другого транспортного средства, второй блок, который реализует процесс корректировки маршрута движения, и третий блок, который выполняет автоматический или автономный процесс управления. Процессор 11 выполняет каждую из вышеупомянутых функций посредством взаимодействия программного обеспечения для реализации каждой функции или для выполнения каждого процесса и вышеописанных аппаратных средств.
[0029] Сначала будет описан процесс вычисления маршрута движения.
Процессор 11 вычисляет маршрут движения, по которому движется транспортное средство-носитель или планируется его движение. Для вычисления маршрута движения процессор 11 получает информацию о транспортном средстве-носителе. Процессор 11 получает текущее положение транспортного средства-носителя от устройства 221 обнаружения положения. Процессор 11 обращается к картографической информации 222 для вычисления маршрута движения с помощью полученного текущего положения и направления движения. Процессор 11 может получать запланированный маршрут движения, который получается посредством навигационного устройства 220, в качестве маршрута движения. Процессор 11 может получать руководство по маршруту из текущего положения в пункт назначения, которое получено посредством навигационного устройства 220, в качестве маршрута движения. Что касается процесса вычисления маршрута транспортного средства-носителя, может быть соответственно использована схема, известная на момент подачи настоящей заявки.
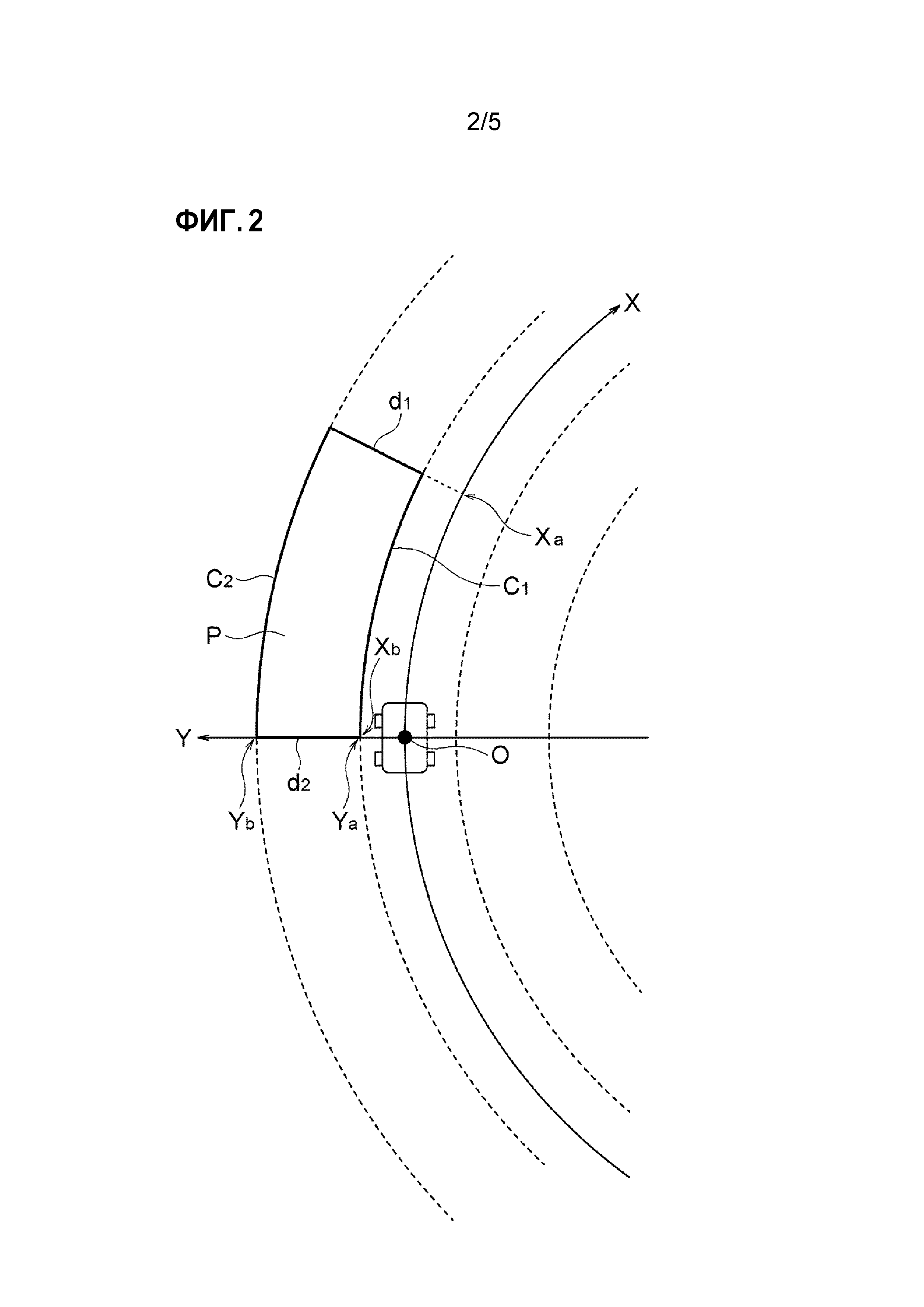
[0030] Со ссылкой на фиг. 2 будет описан процесс настройки области определения транспортного средства. Фиг. 2 - это схема для описания области определения транспортного средства. Описание будет выполнено со ссылкой на примерный случай, который иллюстрирован на фиг. 2, в котором транспортное средство-носитель движется по дороге с тремя полосами движения в каждом направлении, имеющими некоторый изгиб. Различные процессы управления, выполняемые процессором 11, могут быть применены не только к дороге с тремя полосами движения в каждом направлении, имеющими некоторый изгиб, но также к другим дорожным обстановкам, таким как прямая дорога с двумя полосами движения в каждом направлении.
Процессор 11 получает информацию о положении транспортного средства-носителя от навигационного устройства 220 и получает внешнюю информацию транспортного средства-носителя от устройства 230 обнаружения объектов. Процессор 11 извлекает информацию о других транспортных средствах из полученной внешней информации. Процессор 11 указывает направление, в котором присутствует другое транспортное средство, относительно текущего положения транспортного средства-носителя. Достаточно, чтобы направление позволяло различать правую сторону и левую сторону относительно текущего положения транспортного средства-носителя. Правая сторона и левая сторона существуют в перпендикулярном направлении к направлению движения транспортного средства-носителя. Кроме того, процессор 11 указывает скорость транспортного средства для другого транспортного средства из внешней информации.
[0031] Процессор 11 задает область определения транспортного средства на полосе движения, отличной от полосы движения транспортного средства-носителя, обращаясь к маршруту движения, который вычислен посредством процесса вычисления для маршрута движения. Полоса движения, отличная от полосы движения транспортного средства-носителя, является, например, полосой движения, соседней с полосой движения, по которой транспортное средство-носитель движется в данный момент (далее в данном документе эта полоса движения будет также называться «соседней полосой движения»). Область определения транспортного средства задается в соответствии с положением транспортного средства, скоростью транспортного средства и т.д.
[0032] Область определения транспортного средства представляется замкнутой областью вдоль формы дороги. Например, когда форма дороги является изгибающейся формой, как иллюстрировано на фиг. 2, область P определения транспортного средства представляется замкнутой областью, которая включает в себя кривые линии. Когда форма дороги является линейной формой, область определения транспортного средства представляется прямоугольной формой.
[0033] Процессор 11 задает маршрут движения в качестве первой оси и задает поперечное направление относительно транспортного средства-носителя в качестве второй оси, предусматривается, что текущее положение транспортного средства-носителя является точкой начала отсчета (o) на картографических данных. Первая ось и вторая ось являются координатными осями системы координат, которая представляет область определения транспортного средства. Как иллюстрировано на фиг. 2, например, предполагается, что транспортное средство-носитель V движется по полосе движения криволинейной формы. В таком случае, первая ось соответствует оси X, иллюстрированной на фиг. 2, а вторая ось соответствует оси Y, иллюстрированной на фиг. 2. Ось X представляется траекторией кривой линии вдоль полосы движения изгибающейся формы. Направление движения транспортного средства-носителя является положительным направлением оси X. Левая сторона транспортного средства-носителя (левая сторона относительно направления движения) находится в положительном направлении оси Y.
[0034] Область определения транспортного средства окружается двумя кривыми линиями, параллельными оси X, и двумя прямыми линиями, параллельными оси Y. Когда область определения транспортного средства выражается в системе координат, прямая линия (d1) на стороне направления движения транспортного средства-носителя (положительное направление оси X) из двух прямых линий является X=Xa, в то время как прямая линия (d2) на противоположной стороне направления движения транспортного средства-носителя (в отрицательном направлении оси X) является X=Xb. Правая кривая линия (c1) из двух кривых линий является Y=Ya, в то время как левая кривая линия (c2) является Y=Yb. Значения (Xa, Xb, Ya, Yb), представляющие кривые линии и прямые линии, соответствуют пороговым значениям для определения положения и размера области определения транспортного средства.
[0035] Процессор 11 вычисляет пороговые значения (Xa, Xb, Ya, Yb) с помощью следующего способа в соответствии с положением транспортного средства-носителя, направления другого транспортного средства, скорости транспортного средства для транспортного средства-носителя и скорости транспортного средства для другого транспортного средства.
[0036] Процессор 11 сравнивает абсолютную скорость (Ve) транспортного средства-носителя с абсолютной скоростью (Va) другого транспортного средства. Когда абсолютная скорость (Ve) транспортного средства-носителя меньше абсолютной скорости (Va) другого транспортного средства, процессор 11 вычисляет пороговые значения (Xa, Xb) с помощью следующих уравнений (1) и (2).
[Уравнение 1]

[Уравнение 2]

Здесь, T представляет запас времени, остающегося для того, чтобы первое транспортное средство приблизилось к другому транспортному средству, и задается заранее. Время (T) является, например, временем до столкновения (TTC).
[0037] С другой стороны, когда абсолютная скорость (Ve) транспортного средства-носителя не меньше абсолютной скорости (Va) другого транспортного средства, процессор 11 вычисляет пороговые значения (Xa, Xb) с помощью следующих уравнений (3) и (4).
[Уравнение 3]

[Уравнение 4]

[0038] Процессор 11 точно определяет направление другого транспортного средства относительно текущего положения транспортного средства-носителя. Процессор 11 также точно определяет ширину полосы движения на основании внешней информации транспортного средства-носителя или картографической информации 222. Когда ширина полосы движения не может быть точно определена, процессор 11 точно определяет ширину (W) транспортного средства для транспортного средства-носителя. Ширина (W) транспортного средства-носителя может быть задана в большую ширину, чем фактическая ширина транспортного средства для транспортного средства-носителя. Например, ширина (W) транспортного средства может быть установлена в сравнимую протяженность со средней шириной полос движения.
[0039] Когда другое транспортное средство присутствует с левой стороны транспортного средства-носителя, процессор 11 вычисляет пороговые значения (Ya, Yb) с помощью следующих уравнений (5) и (6).
[0040] [Уравнение 5]

[Уравнение 6]

[0041] Когда другое транспортное средство присутствует с правой стороны транспортного средства-носителя, процессор 11 вычисляет пороговые значения (Ya, Yb) с помощью следующих уравнений (7) и (8).
[0042] [Уравнение 7]

[Уравнение 8]

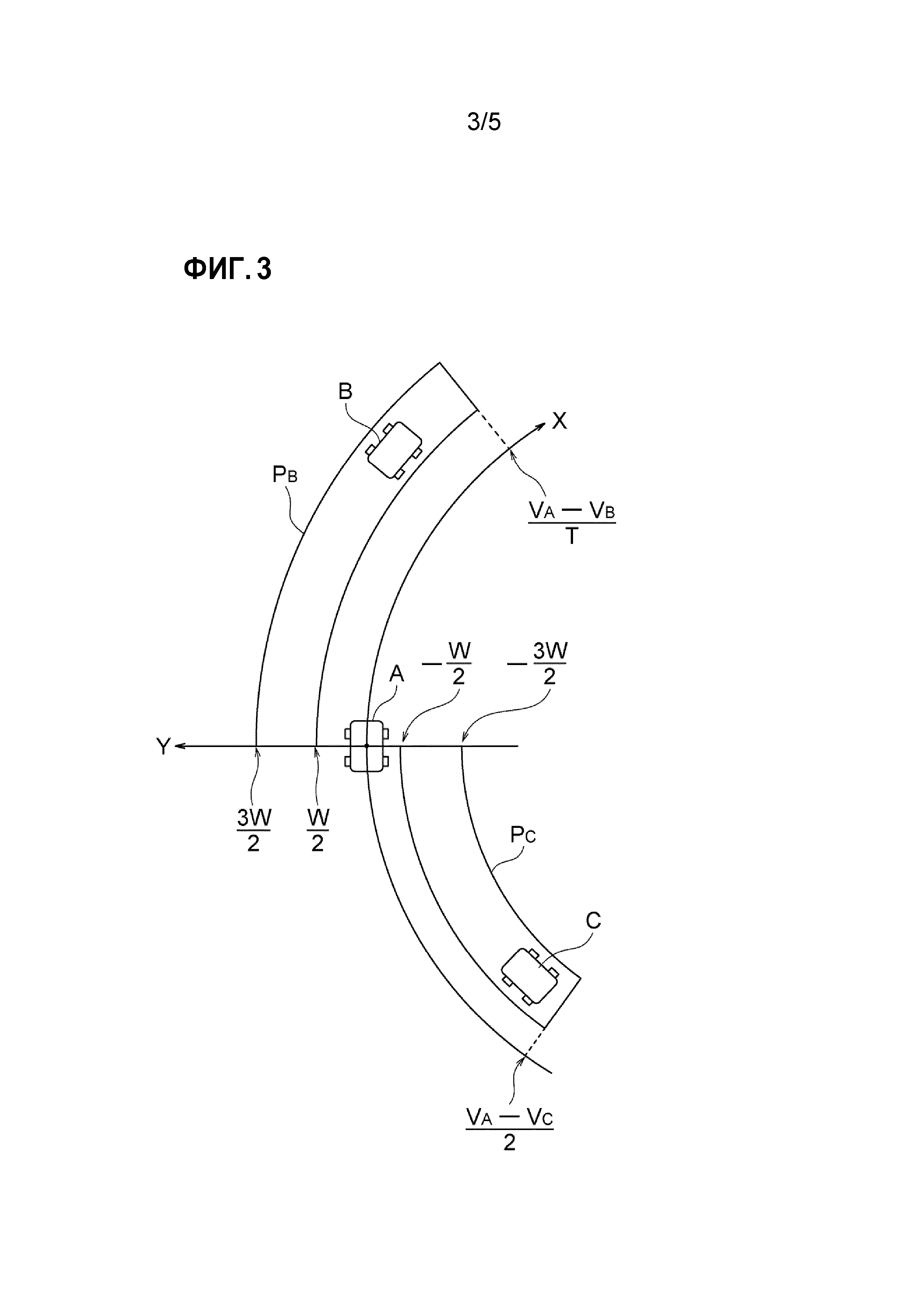
[0043] Со ссылкой на пример на фиг. 3, область определения транспортного средства, заданная посредством процессора 11, будет описана далее. Как иллюстрировано на фиг. 3, другое транспортное средство B движется по левой соседней полосе движения по отношению к полосе движения транспортного средства-носителя A, и еще одно транспортное средство C движется по правой соседней полосе. Скорость VB транспортного средства для другого транспортного средства B меньше скорости VA транспортного средства для транспортного средства-носителя A. Скорость VC транспортного средства для другого транспортного средства C больше скорости VA транспортного средства для транспортного средства-носителя A.
[0044] Процессор 11 получает информацию о текущем положении транспортного средства-носителя A и устанавливает текущее положение транспортного средства-носителя A в начальную точку отсчета (соответствующую точке начала отсчета системы координат) для задания области определения транспортного средства. Процессор 11 точно определяет, что другое транспортное средство B движется впереди транспортного средства-носителя A с левой стороны, и что другое транспортное средство C движется позади транспортного средства-носителя A с правой стороны.
[0045] Скорость (VA) транспортного средства для транспортного средства-носителя A больше скорости (VB) транспортного средства для другого транспортного средства B; следовательно, процессор 11 вычисляет пороговые значения (Xa, Xb) с помощью уравнений (3) и (4). Пороговое значение (Xa) равно (VA-VB)×T. Пороговое значение (Xa=(VA-VB)×T) является положительным значением. Пороговое значение (Xb) равно нулю. Кроме того, другое транспортное средство B находится с левой стороны от транспортного средства-носителя A; следовательно, процессор 11 вычисляет пороговые значения (Ya, Yb) с помощью уравнений (5) и (6). Пороговое значение (Ya) равно W/2 и пороговое значение (Yb) равно 3W/2. Затем, область PB определения транспортного средства, представленная пороговыми значениями (Xa, Xb, Ya, Yb), задается на левой соседней полосе движения по отношению к транспортному средству-носителю A, как иллюстрировано на фиг. 3.
[0046] Процессор 11 задает область PC определения транспортного средства также на правой соседней полосе движения, поскольку другое транспортное средство C движется по правой соседней полосе движения. Скорость (VA) транспортного средства для транспортного средства-носителя A меньше скорости (VC) транспортного средства для другого транспортного средства C; следовательно, процессор 11 вычисляет пороговые значения (Xa, Xb) с помощью уравнений (1) и (2). Пороговое значение (Xa) равно нулю. Пороговое значение (Xb) равно (VA-VC)×T. Пороговое значение (Xb=(VA-VC)×T) является отрицательным значением. Кроме того, другое транспортное средство C находится с правой стороны от транспортного средства-носителя A; следовательно, процессор 11 вычисляет пороговые значения (Ya, Yb) с помощью уравнений (7) и (8). Пороговое значение (Ya) равно -(3W/2) и пороговое значение (Yb) равно -(W/2). Затем, область PC определения транспортного средства, представленная пороговыми значениями (Xa, Xb, Ya, Yb), задается на правой соседней полосе движения по отношению к транспортному средству-носителю A, как иллюстрировано на фиг. 3.
[0047] Как описано выше, процессор 11 задает области определения транспортного средства на соседних полосах сбоку по отношению к положению транспортного средства-носителя. Когда транспортное средство-носитель A становится относительно близким к другому транспортному средству, движущемуся впереди по соседней полосе движения, процессор 11 задает область определения транспортного средства на соседней полосе движения впереди. Когда другое транспортное средство, движущееся позади по соседней полосе движения, становится относительно близким к транспортному средству-носителю, процессор 11 задает область определения транспортного средства на соседней полосе движения позади.
[0048] Процесс определения присутствия или отсутствия другого транспортного средства будет описан далее. После задания области определения транспортного средства процессор 11 точно определяет положение другого транспортного средства на основании выходного результата устройства 230 обнаружения объектов. Затем процессор 11 определяет, попадает ли текущее положение другого транспортного средства в область определения транспортного средства. В частности, процессор 11 вычисляет координаты, представляющие текущее положение другого транспортного средства. Когда координаты (X, Y) положения другого транспортного средства удовлетворяют следующим уравнениям (9) и (10), процессор 11 определяет, что другое транспортное средство присутствует сбоку по отношению к транспортному средству-носителю. С другой стороны, когда координаты (X, Y) положения другого транспортного средства не удовлетворяют следующим уравнениям (9) и (10), процессор 11 определяет, что другое транспортное средство не присутствует сбоку по отношению к транспортному средству-носителю.
[Уравнение 9]

[Уравнение 10]

[0049] Будет описан процесс корректировки маршрута движения.
Процессор 11 корректирует маршрут движения в соответствии с результатом определения процесса определения транспортного средства. Когда другое транспортное средство становится относительно близким к транспортному средству-носителю, процессор 11 корректирует маршрут движения транспортного средства-носителя так, что транспортное средство-носитель движется вбок от другого транспортного средства.
[0050] В частности, процессор 11 вычисляет положение и скорость транспортного средства для другого транспортного средства, присутствующего в области определения транспортного средства, из внешней информации, полученной от устройства 230 обнаружения объектов. Процессор 11 вычисляет каждое из положения другого транспортного средства, находящегося с левой стороны относительно направления движения транспортного средства-носителя, и положения еще одного транспортного средства, находящегося с правой стороны относительно направления движения транспортного средства-носителя.
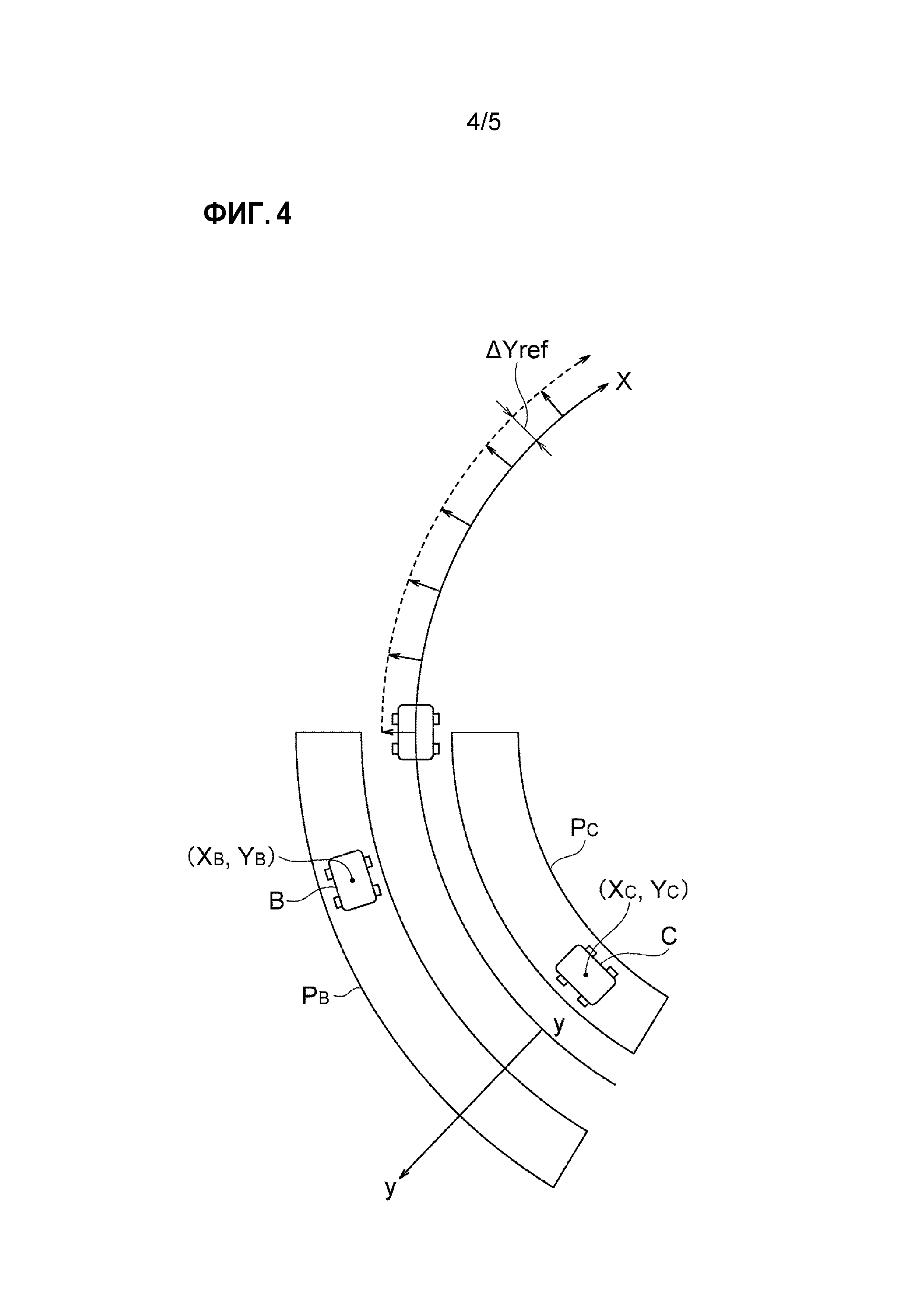
[0051] Фиг. 4 является схемой для описания процесса корректировки маршрута движения и является принципиальной схемой для описания маршрута движения транспортного средства-носителя A и относительных положений между транспортными средствами A-C. Транспортное средство A является транспортным средством-носителем, а транспортные средства B и C являются другими транспортными средствами. Обозначение координатных осей (оси X и оси Y) является таким же, что и на фиг. 2 и 3. Положение другого транспортного средства B представляется координатами (XB, YB), а положение другого транспортного средства C представляется координатами (XC, YC). PB представляет область определения транспортного средства, используемую для определения другого транспортного средства B, а PC представляет область определения транспортного средства, используемую для определения другого транспортного средства C. Пунктирная стрелка указывает скорректированный маршрут движения.
[0052] Процессор 11 вычисляет величину корректировки (ΔYref) для маршрута движения с помощью следующего уравнения (11).
[Уравнение 11]

[0053] Здесь, KV и KY являются поправочными коэффициентами, которые задаются заранее. Например, когда другое транспортное средство B или C приближаются к транспортному средству-носителю A сзади, поправочный коэффициент (KV) задается так, что величина корректировки (KVVB или KVVC) увеличивается, когда скорость транспортного средства для другого транспортного средства увеличивается. Например, когда транспортное средство-носитель A приближается к другому транспортному средству B или C, присутствующему впереди, поправочный коэффициент (KV) задается так, что величина корректировки (KVVB или KVVC) увеличивается, когда скорость транспортного средства для другого транспортного средства уменьшается. В качестве дополнения или альтернативы, поправочный коэффициент (KY) задается таким образом, что величина корректировки (KYYB или KYYC) увеличивается, когда боковое расстояние между транспортным средством-носителем A и другим транспортным средством B или C становится более узким, т.е. когда координата в направлении Y другого транспортного средства B или C является меньшей.
[0054] Величина корректировки (ΔYref) является величиной сдвига, когда текущий маршрут движения транспортного средства-носителя сдвигается в направлении оси Y. Т.е. когда величина корректировки (ΔYref) является положительным значением, маршрут движения транспортного средства-носителя сдвигается в левую сторону относительно направления движения. С другой стороны, когда величина корректировки (ΔYref) является отрицательным значением, маршрут движения транспортного средства-носителя сдвигается в правую сторону относительно направления движения. Когда величина корректировки (ΔYref) увеличивается, величина сдвига маршрута движения увеличивается.
[0055] Процессор 11 может вычислять величину корректировки (ΔYref) для маршрута движения с помощью следующего уравнения (12) вместо вышеописанного уравнения (11).
[Уравнение 12]

[0056] Здесь, поправочный коэффициент (KV) задается так, что величина корректировки (KV(VB-VA) или KV(VC-VA)) увеличивается, когда относительная скорость (VB-VA или VC-VA) между транспортным средством-носителем и другим транспортным средством увеличивается.
[0057] Когда соответствующие другие транспортные средства присутствуют на левой соседней полосе движения и правой соседней полосе движения, процессор 11 вычисляет верхнее предельное значение величины корректировки (ΔYrefMAX). В частности, процессор 11 вычисляет расстояние между транспортными средствами с левой стороны и расстояние между транспортными средствами с правой стороны. Расстояние между транспортными средствами с левой стороны является расстоянием в поперечном направлении транспортного средства между транспортным средством-носителем и другим транспортным средством, присутствующим на левой соседней полосе движения. Расстояние между транспортными средствами с правой стороны является расстоянием в поперечном направлении транспортного средства между транспортным средством-носителем и другим транспортным средством, присутствующим на правой соседней полосе движения. В примере на фиг. 4 YB представляет расстояние между транспортными средствами с левой стороны, а YC представляет расстояние между транспортными средствами с правой стороны. Процессор 11 устанавливает меньшее расстояние из расстояния между транспортными средствами с левой стороны и расстояния между транспортными средствами с правой стороны в качестве верхнего предельного значения величины корректировки (ΔYrefMAX). Когда величина корректировки (ΔYref) не меньше верхнего предельного значения величины корректировки (ΔYrefMAX), процессор 11 корректирует величину корректировки (ΔYref) в меньшее значение по сравнению с верхним предельным значением величины корректировки (ΔYrefMAX).
[0058] Когда другое транспортное средство присутствует только на левой соседней полосе движения, процессор 11 может вычислять величину корректировки (ΔYref) с помощью следующего уравнения (13).
[Уравнение 13]

[0059] Когда другое транспортное средство присутствует только на правой соседней полосе движения, процессор 11 может вычислять величину корректировки (ΔYref) с помощью следующего уравнения (14).
[Уравнение 14]

[0060] Т.е., когда определяется, что другое транспортное средство присутствует с левой стороны относительно направления движения транспортного средства-носителя, процессор 11 вычисляет величину корректировки так, что маршрут движения сдвигается на маршрут с правой стороны относительно направления движения, и корректирует маршрут движения. С другой стороны, когда определяется, что другое транспортное средство присутствует с правой стороны относительно направления движения транспортного средства-носителя, процессор 11 вычисляет величину корректировки так, что маршрут движения сдвигается на маршрут с левой стороны относительно направления движения, и корректирует маршрут движения.
[0061] После вычисления величины корректировки (ΔYref) процессор 11 корректирует маршрут движения транспортного средства-носителя с помощью вычисленной величины корректировки (ΔYref). Добавление величины корректировки (ΔYref) к координате по Y маршрута движения позволяет корректировать маршрут движения, поскольку маршрут движения представлен посредством системы координат, использующей ось X и ось Y. Таким образом, процессор 11 корректирует маршрут движения, сдвигая маршрут движения перед корректировкой в перпендикулярном направлении относительно маршрута движения транспортного средства-носителя. В этой операции, если величина корректировки (ΔYref) просто добавляется к маршруту движения перед корректировкой, скорректированный маршрут движения может быть искривлен в точке корректировки, в которой корректировка выполняется. Чтобы предотвращать возникновение такой точки искривления на скорректированном маршруте движения, процессор 11 складывает величину корректировки на множестве стадий, так что маршрут движения перед корректировкой постепенно достигает маршрута корректировки (скорректированного маршрута движения), к которому добавляется величина корректировки (ΔYref). Величина корректировки, которая должна быть добавлена на каждой стадии, является, например, значением, полученным делением величины корректировки (ΔYref) на заданное время корректировки. Время корректировки является периодом, в течение которого корректировка выполняется. Например, время корректировки увеличивается, когда скорость транспортного средства-носителя увеличивается. Т.е., процессор 11 корректирует маршрут движения так, что величина корректировки увеличивается со временем.
[0062] Будет описан автоматический или автономный процесс управления.
Процессор 11 управляет устройством 260 привода и устройством 270 рулевого управления так, что транспортное средство-носитель движется по маршруту движения. В этой операции, когда маршрут движения транспортного средства-носителя корректируется посредством процесса корректировки маршрута движения, процессор 11 управляет устройством 260 привода и устройством 270 рулевого управления на основании скорректированного маршрута движения. Хотя конкретный способ управления в автоматическом или автономном процессе управления не описан подробно, может быть использован, например, способ управления, известный на момент подачи настоящей заявки.
[0063] Со ссылкой на фиг. 5 далее будет описан процесс управления для процессора 11. Процесс управления, выполняемый процессором 11, включает в себя процесс определения другого транспортного средства и процесс корректировки маршрута движения, который будет описан. Процессор 11 циклически выполняет процесс управления, иллюстрированный на фиг. 5, с заданными интервалами.
[0064] На этапе S1 процессор 11 получает информацию о транспортном средстве-носителе от навигационного устройства 220 и устройства 250 обнаружения. Информация о транспортном средстве-носителе, которая является информацией о транспортном средстве-носителе, включает в себя по меньшей мере информацию о положении и информацию о скорости транспортного средства для транспортного средства-носителя.
[0065] На этапе S2 процессор 11 получает внешнюю информацию от устройства 230 обнаружения объектов. Внешняя информация включает в себя по меньшей мере информацию о других транспортных средствах. На этапе S3 процессор 11 вычисляет маршрут движения транспортного средства-носителя.
[0066] На этапе S4 процессор 11 задает одну или более областей определения транспортного средства. В частности, процессор 11 использует устройство 230 обнаружения объектов, чтобы обнаруживать другое транспортное средство в перпендикулярном направлении к касательному направлению маршрута движения транспортного средства-носителя. Процессор 11 задает область определения транспортного средства сбоку по отношению к положению транспортного средства-носителя.
[0067] На этапе S5 процессор 11 определяет присутствие или отсутствие другого транспортного средства, расположенного сбоку по отношению к транспортному средству-носителю, на основании обнаруженного положения другого транспортного средства. Когда положение обнаруженного другого транспортного средства попадает в область определения транспортного средства, процессор 11 определяет, что другое транспортное средство присутствует сбоку по отношению к транспортному средству-носителю. Процесс управления переходит к этапу S6. С другой стороны, когда положение обнаруженного другого транспортного средства не попадает в область определения транспортного средства, процессор 11 определяет, что другое транспортное средство не присутствует сбоку по отношению к транспортному средству-носителю. Процесс управления, таким образом, заканчивается.
[0068] На этапе S6 процессор 11 вычисляет величину корректировки в соответствии с положением обнаруженного другого транспортного средства, скоростью обнаруженного другого транспортного средства, положением транспортного средства-носителя и скоростью транспортного средства-носителя.
[0069] На этапе S7 процессор 11 корректирует маршрут движения в соответствии с вычисленной величиной корректировки. Процесс управления, таким образом, заканчивается.
[0070] Как описано выше, согласно одному или более вариантам осуществления настоящего изобретения маршрут движения транспортного средства-носителя вычисляется, другое транспортное средство, находящееся в перпендикулярном направлении по отношению к касательному направлению маршрута движения, обнаруживается, и присутствие или отсутствие другого транспортного средства, находящегося сбоку по отношению к транспортному средству-носителю, определяется на основании положения обнаруженного другого транспортного средства. Посредством этой операции присутствие или отсутствие другого транспортного средства может быть определено даже в ситуации, в которой обнаружение полосы движения является затруднительным.
[0071] Согласно одному или более вариантам осуществления настоящего изобретения, область определения транспортного средства задается сбоку по отношению к положению транспортного средства-носителя, и когда положение обнаруженного другого транспортного средства попадает в область определения транспортного средства, выполняется определение, что другое транспортное средство присутствует сбоку по отношению к транспортному средству-носителю. Посредством этой операции присутствие или отсутствие другого транспортного средства, присутствующего сбоку по отношению к транспортному средству-носителю, может быть определено даже в ситуации, в которой обнаружение полосы движения является затруднительным.
[0072] Согласно одному или более вариантам осуществления настоящего изобретения, область определения транспортного средства задается по меньшей мере с левой стороны и правой стороны относительно направления движения транспортного средства-носителя. Посредством этой операции присутствие или отсутствие другого транспортного средства, присутствующего сбоку по отношению к транспортному средству-носителю с левой стороны, и/или присутствие или отсутствие другого транспортного средства, присутствующего сбоку по отношению к транспортному средству-носителю с правой стороны, может быть определено даже в ситуации, в которой обнаружение полосы движения является затруднительным.
[0073] Согласно одному или более вариантам осуществления настоящего изобретения, размер области определения транспортного средства задается в соответствии со скоростью транспортного средства-носителя и скоростью другого транспортного средства. Посредством этой операции присутствие или отсутствие близкого транспортного средства может быть определено с учетом возможности столкновения.
[0074] Согласно одному или более вариантам осуществления настоящего изобретения, размер области определения транспортного средства в перпендикулярном направлении задается в соответствии с шириной полосы или шириной транспортного средства. Перпендикулярное направление означает направление, перпендикулярное направлению движения. Это позволяет задавать область определения транспортного средства вместе с фактической дорожной обстановкой. Следовательно, может быть повышена точность определения присутствия или отсутствия другого транспортного средства.
[0075] Согласно одному или более вариантам осуществления настоящего изобретения, маршрут движения корректируется в соответствии с результатом определения, выполненного посредством процесса определения транспортного средства. Это позволяет создавать безопасный и надежный маршрут движения даже в ситуации, в которой обнаружение полосы движения является затруднительным.
[0076] Согласно одному или более вариантам осуществления настоящего изобретения, когда другое транспортное средство приближается относительно близко к транспортному средству-носителю, маршрут движения корректируется так, что транспортное средство-носитель движется вбок от другого транспортного средства. Посредством этой операции, даже в ситуации, в которой обнаружение полосы движения является затруднительным, безопасный и надежный маршрут движения может быть сформирован, когда другое транспортное средство приближается к транспортному средству-носителю.
[0077] Согласно одному или более вариантам осуществления настоящего изобретения, когда выполняется определение, что другое транспортное средство присутствует с левой стороны относительно направления движения транспортного средства-носителя, маршрут движения корректируется так, что маршрут движения сдвигается на маршрут с правой стороны относительно направления движения. Это позволяет создавать безопасный и надежный маршрут движения, когда другое транспортное средство приближается к транспортному средству-носителю с левой стороны.
[0078] Согласно одному или более вариантам осуществления настоящего изобретения, когда выполняется определение, что другое транспортное средство присутствует с правой стороны относительно направления движения транспортного средства-носителя, маршрут движения корректируется так, что маршрут движения сдвигается на маршрут с левой стороны относительно направления движения. Это позволяет создавать безопасный и надежный маршрут движения, когда другое транспортное средство приближается к транспортному средству-носителю с правой стороны.
[0079] Согласно одному или более вариантам осуществления настоящего изобретения, когда выполняется определение, что другое транспортное средство присутствует с левой стороны относительно направления движения транспортного средства-носителя, и еще одно транспортное средство присутствует с правой стороны относительно направления движения транспортного средства-носителя, более короткое расстояние из расстояния между транспортными средствами с левой стороны и расстояния между транспортными средствами с правой стороны устанавливается в качестве верхнего предельного значения величины корректировки, величина корректировки меньше верхнего предельного значения величины корректировки вычисляется в соответствии с результатом определения, выполненного посредством процесса определения транспортного средства, и маршрут движения корректируется с помощью вычисленной величины корректировки. Это может предотвращать столкновение скорректированного маршрута движения с маршрутом движения другого транспортного средства или приближение маршрута движения другого транспортного средства, и безопасный и надежный маршрут движения может, следовательно, быть сформирован.
[0080] Согласно одному или более вариантам осуществления настоящего изобретения, величина корректировки вычисляется в соответствии по меньшей мере с одним значением из положения и скорости обнаруженного другого транспортного средства, и маршрут движения корректируется с помощью вычисленной величины корректировки. Посредством этой операции присутствие или отсутствие близкого транспортного средства может быть определено с учетом возможности столкновения.
[0081] Согласно одному или более вариантам осуществления настоящего изобретения, маршрут движения корректируется посредством добавления величины корректировки к маршруту движения перед корректировкой для транспортного средства-носителя, и величина корректировки увеличивается со временем. Это может предотвращать быстрое изменение маршрута движения при корректировке.
[0082] Согласно одному или более вариантам осуществления настоящего изобретения, маршрут движения корректируется посредством сдвига маршрута движения в перпендикулярном направлении по отношению к маршруту движения транспортного средства-носителя. Например, когда маршрут движения корректируется во время движения транспортного средства-носителя по полосе движения, имеющей некоторый изгиб, скорректированный маршрут движения сдвигается параллельно в радиальном направлении. Посредством этой операции, даже если изменение возникает в значение положения близкого транспортного средства, например, вследствие ошибок распознавания транспортного средства во время движения по окружности, возможно пресекать резкое отклонение скорректированного маршрута движения.
[0083] В модифицированном примере одного или более вариантов осуществления настоящего изобретения, когда положение другого транспортного средства приходит в состояние, в котором оно выходит за пределы области определения транспортного средства, во время корректировки маршрута движения процессор 11 со временем уменьшает величину корректировки. Другое транспортное средство, упоминаемое в настоящем документе, является транспортным средством, которое должно быть определено посредством процесса определения транспортного средства. В варианте осуществления согласно модифицированному примеру, маршрут движения корректируется таким образом, чтобы отдалиться от другого транспортного средства, которое приближается к транспортному средству-носителю. Затем, когда другое транспортное средство, которое приблизилось, исчезает из окружающего пространства транспортного средства-носителя, корректировка больше не является необходимой, и процессор 11, следовательно, возвращает скорректированный маршрут движения на маршрут движения перед корректировкой. В этой операции процессор 11 постепенно уменьшает величину корректировки со временем. Эта величина корректировки соответствует разнице между маршрутом движения, который был скорректирован, и маршрутом движения перед корректировкой. Это может предотвращать быстрое изменение маршрута движения при корректировке.
[0084] В одном или более вариантах осуществления настоящего изобретения процесс определения транспортного средства и процесс корректировки маршрута движения могут выполняться посредством процессора 11 не только для соседней полосы движения, но также для дальнейшей соседней полосы движения по отношению к соседней полосе движения.
Описание условных обозначений
[0085] 10 Устройство планирования движения
11 Процессор
20 Устройство вывода
30 Устройство связи
50 Устройство обнаружения объектов
70 Контроллер транспортного средства
100 Оборудование помощи в управлении
120 Навигационное устройство
200 Бортовое оборудование
210 Контроллер транспортного средства
220 Навигационное устройство
221 Устройство обнаружения положения
222 Картографическая информация
223 Дорожная информация
230 Устройство обнаружения объектов
231 Камера
232 Радарное устройство
240 Устройство вывода
241 Дисплей
242 Динамик
250 Устройство обнаружения
250 Устройство вывода
251 Датчик угла поворота рулевого колеса
252 Датчик скорости транспортного средства
253 Датчик пространственного положения
260 Устройство привода
261 Тормозное устройство
270 Устройство рулевого управления
Реферат
Изобретение относится к способу и устройству оценки транспортного средства и способу и устройству корректировки маршрута движения. Способ определения транспортного средства содержит этапы, на которых вычисляют маршрут движения транспортного средства-носителя, обнаруживают другое транспортное средство, находящееся в перпендикулярном направлении по отношению к касательному направлению маршрута движения, задают маршрут движения в качестве первой оси с текущим положением транспортного средства-носителя в качестве точки начала отсчета, задают область определения транспортного средства в перпендикулярном направлении по отношению к касательному направлению маршрута движения относительно первой оси и, когда положение обнаруженного другого транспортного средства попадает в область определения транспортного средства, определяют, что другое транспортное средство присутствует сбоку по отношению к транспортному средству-носителю. Достигается повышение безопасности управления транспортным средством. 4 н. и 12 з.п. ф-лы, 5 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство помощи при вождении
Комментарии