Система транспортного средства для обнаружения местоположений с низким просветом (варианты) и система для предупреждения о местоположениях с низким просветом - RU152044U1
Код документа: RU152044U1
Чертежи

Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ПОЛЕЗНАЯ МОДЕЛЬ
Настоящая полезная модель относится к системам и способам уменьшения риска столкновений транспортного средства с сооружениями с низким просветом, в частности, к системам транспортного средства для обнаружения местоположений с низким просветом и системам для предупреждения о местоположениях с низким просветом.
УРОВЕНЬ ТЕХНИКИ
Транспортные средства часто снабжены багажными полками, креплениями или прицепами, чтобы позволить водителю транспортировать груз на крыше транспортного средства или буксировать груз за транспортным средством. Груз часто расширяет вертикальную высоту транспортного средства, повышая риск для столкновения между грузом и объектами с низким просветом, например, такими как навесы или гаражные ворота. Такие столкновения могут приводить к гибели людей и повреждению имущества у водителей, а также вызывать экономическое бремя на правительственные и коммерческие учреждения для обследования или восстановления повреждения от аварий.
Было предложено несколько решений для уменьшения риска столкновений транспортного средства с сооружениями с низким просветом. Например, было предложено устройство для напоминания, описанное в US 7,391,311 (МПК B60Q 1/50, опубл. 24.06.2008) или такое как ярлык, свисающий с зеркала заднего вида транспортного средства. Однако такое устройство для напоминания всего лишь напоминает пользователю, что груз находится на крыше, и чтобы не забывал, но не ссылается точно на какие-нибудь конкретные ограничения высоты просвета.
Кроме того, была предложена электронная система, привлекающая близость транспортного средства к известному местоположению с низким просветом. Эти системы включают в себя глобальную систему определения местоположения для сравнения относительной близости к местоположению сооружения с известным низким просветом и транспортному средству. Однако предупреждение основано на близости к какому-нибудь низкому просвету, и не приспособлено к текущей высоте транспортного средства. Дополнительно, такие системы не выполнены с возможностью контролировать в реальном времени неизвестные или незарегистрированные сооружения с низким просветом и оповещать пользователя соответствующим образом. Соответственно, есть необходимость в системе для выявления приближающегося надземного сооружения и оповещения пользователя о потенциально возможном столкновении в ответ на введенную высоту транспортного средства, заданные сооружения с низким просветом и обнаружение таких сооружений в реальном времени.
СУЩНОСТЬ ПОЛЕЗНОЙ МОДЕЛИ
Система транспортного средства для обнаружения местоположений с низким просветом может включать в себя контроллер, выполненный с возможностью
осуществления доступа к базе данных географической информации, выполненной с возможностью хранения множества заданных точек интереса, определенных высотой просвета;
осуществления связи с первым датчиком для обнаружения сооружения с низким просветом;
определения посредством второго датчика местоположения сооружения с низким просветом; и
обновления базы данных географической информации местоположением сооружения с низким просветом для формирования новой точки интереса.
В одном из вариантов предложена система, в которой контроллер выполнен с возможностью:
определения посредством первого датчика высоты сооружения с низким просветом; и
обновления точки интереса, связанной с местоположением сооружения с низким просветом, хранящимся в базе данных географической информации, высотой сооружения с низким просветом.
В одном из вариантов предложена система, в которой контроллер выполнен с возможностью:
приема пользовательского ввода через интерфейс пользователя, выбирающего вариант высоты транспортного средства, указывающий высоту транспортного средства,
связывания высоты транспортного средства с высотой просвета точки интереса в пределах заданного радиуса; и
формирования точек столкновения в ответ на высоту транспортного средства и высоту просвета, в которых высота транспортного средства больше, чем высота просвета точки интереса.
В одном из вариантов предложена система, в которой контроллер выполнен с возможностью подачи команды пользовательскому интерфейсу выводить предупреждение в ответ на приближение к точкам столкновения.
В одном из вариантов предложена система, в которой контроллер выполнен с возможностью:
приема данных маршрута и формирования наиболее вероятной траектории.
фильтрации удаленных точек интереса, находящихся вне наиболее вероятной траектории, в ответ на данные маршрута; и
формирования точек столкновения в ответ на точки интереса на наиболее вероятной траектории.
В одном из вариантов предложена система, в которой пользовательский интерфейс содержит множество вариантов высоты транспортного средства, при этом варианты высоты транспортного средства содержат по меньшей мере первую заданную высоту транспортного средства и вторую заданную высоту транспортного средства.
В одном из вариантов предложена система, в которой пользовательский интерфейс осуществляет связь с портативным электронным устройством, выполненным с возможностью установки выбираемых вариантов, причем портативное электронное устройство дополнительно выполнено с возможностью автоматического вычисления высоты транспортного средства в ответ на формирование изображения транспортного средства.
В одном из вариантов предложена система, в которой контроллер выполнен с возможностью обновления базы данных географической информации в ответ на очищение точки столкновения, чтобы контроллер больше не связывал точку столкновения с вариантом высоты транспортного средства.
В одном из вариантов предложена система, в которой контроллер выполнен с возможностью:
приема сообщение об удаленной точке интереса, при этом удаленная точка интереса сообщается посредством коммерческого абонента и включает в себя высоту просвета и местоположение;
обновления базы данных географической информации для включения в состав удаленной точки интереса.
В одном из вариантов предложена система, в которой контроллер выполнен с возможностью:
связывания высоты транспортного средства с сообщением об удаленной точке интереса;
формирования точек столкновения в ответ на высоту транспортного средства и высоту просвета удаленной точки интереса.
Система транспортного средства для обнаружения местоположений с низким просветом может включать в себя контроллер, выполненный с возможностью принимать, через пользовательский интерфейс, пользовательский ввод, указывающий высоту транспортного средства. Контроллер может обнаруживать, посредством первого датчика, сооружение с низким просветом и определять высоту просвета. Контроллер может связывать высоту транспортного средства с высотой просвета для определения точки столкновения. Место столкновения может представлять высоту транспортного средства, большую, чем высота просвета. Контроллер может давать команду пользовательскому интерфейсу выводить предупреждение в ответ на приближение к точке столкновения.
Тогда, в одном из дополнительных аспектов предложена система транспортного средства для обнаружения местоположений с низким просветом, содержащая:
контроллер, выполненный с возможностью:
приема через пользовательский интерфейс пользовательского ввода, указывающего высоту транспортного средства;
обнаружения посредством первого датчика сооружения с низким просветом и определения высоты просвета;
связывания высоты транспортного средства с высотой просвета для определения точки столкновения, в которой высоты транспортного средства больше, чем высота просвета; и
выдачи команды пользовательскому интерфейсу выводить предупреждение в ответ на приближение к точке столкновения.
В одном из вариантов предложена система, в которой контроллер выполнен с возможностью заполнения базы данных географической информации в ответ на обнаружение сооружений с низким просветом для формирования точек интереса.
В одном из вариантов предложена система, в которой пользовательский ввод содержит множество вариантов высоты транспортного средства, при этом варианты высоты транспортного средства включают в себя различные заданные высоты транспортного средства.
В одном из вариантов предложена система, в которой контроллер выполнен с возможностью связывания вариантов высоты транспортного средства с точками интереса, хранящимися в базе данных географической информации, для формирования точек столкновения.
В одном из вариантов предложена система, в которой контроллер выполнен с возможностью фильтрации точек интереса за пределами заданного радиуса.
В одном из вариантов предложена система, в которой контроллер выполнен с возможностью вывода предложенного порядка действия в ответ на приближение к точке столкновения.
Система для оповещения о местоположениях с низким просветом может включать в себя контроллер, выполненный с возможностью принимать, через пользовательский интерфейс, пользовательский ввод, выбирающий выбираемый вариант. Выбираемый вариант может включать в себя заданную высоту транспортного средства. Контроллер может выявлять, посредством первого датчика, местоположение транспортного средства и осуществлять доступ к базе данных географической информации, выполненной с возможностью поддерживать множество заданных точек интереса, определенных высотой просвета. Контроллер может сравнивать высоты просвета точек интереса с высотой транспортного средства, чтобы формировать точки столкновения, при этом точки столкновения могут указывать, что высота транспортного средства больше, чем высота просвета. Контроллер может приводить в состояние готовности пользовательский интерфейс в ответ на приближение к точке столкновения.
Тогда в одном из еще дополнительных аспектов предложена система для предупреждения о местоположениях с низким просветом, содержащая:
контроллер, выполненный с возможностью:
приема через пользовательский интерфейс пользовательского ввода, выбирающего выбираемый вариант, содержащий заданную высоту транспортного средства;
определения посредством первого датчика местоположения транспортного средства;
осуществления доступа к базе данных географической информации, выполненной с возможностью хранения множества заданных точек интереса, определенных высотой просвета;
сравнения высоты просвета точек интереса с высотой транспортного средства для формирования точек столкновения, причем точки столкновения указывают высоту транспортного средства, большую, чем высота просвета; и
предупреждения через пользовательский интерфейс в ответ на приближение к точкам столкновения.
В одном из вариантов предложена система, в которой контроллер дополнительно выполнен с возможностью обнаружения посредством второго датчика сооружения с низким просветом и определения высоты сооружения с низким просветом.
В одном из вариантов предложена система, в которой контроллер выполнен с возможностью заполнения базы данных географической информации сооружением с низким просветом и высотой сооружения с низким просветом для формирования точек интереса.
В одном из вариантов предложена система, в которой первый датчик содержит глобальную систему определения местоположения, а второй датчик включает в себя одно из видеокамеры, радарного устройства и инфракрасной камеры.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
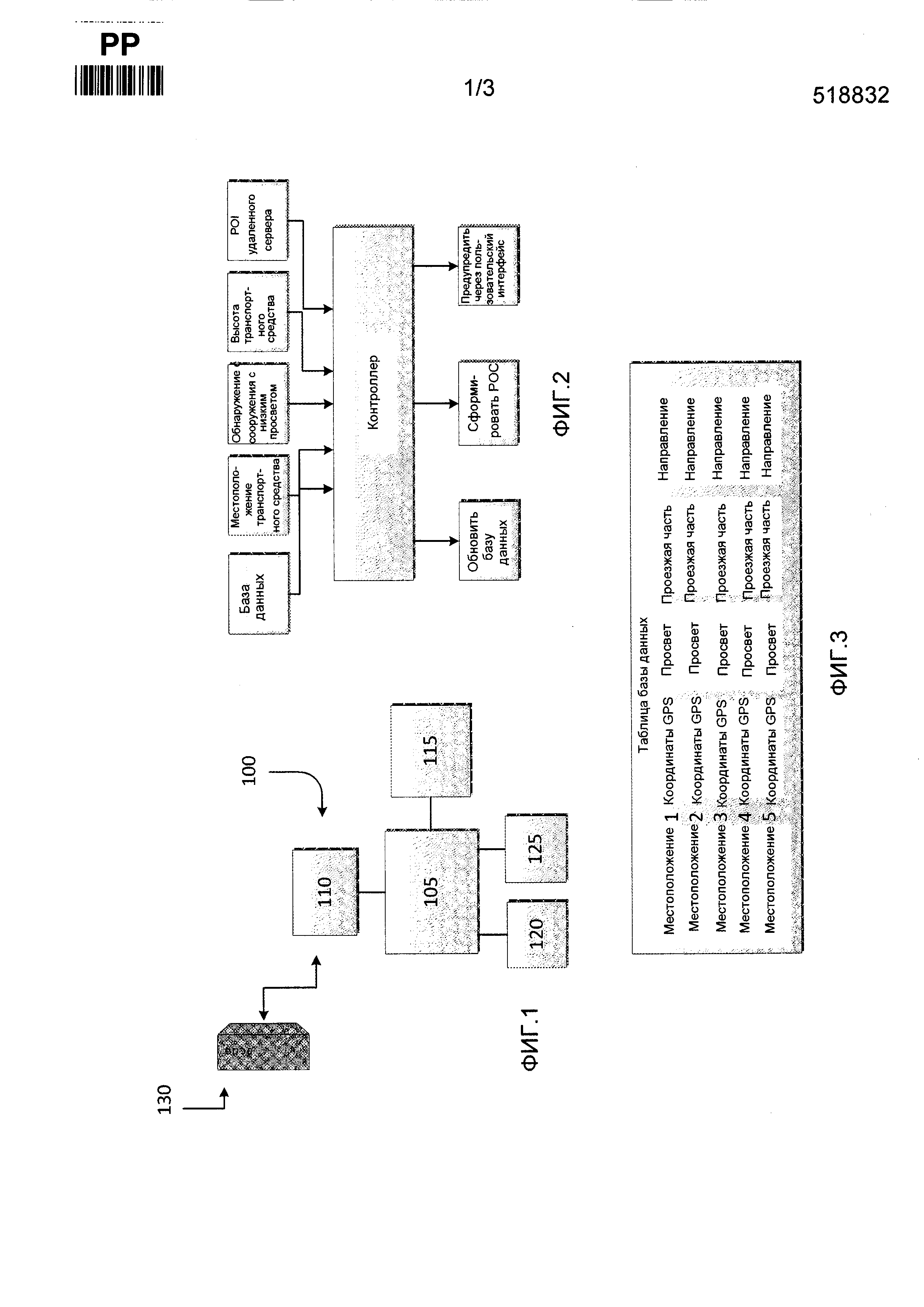
Фиг. 1 иллюстрирует примерную систему для обнаружения и оповещения о местоположениях с низким просветом;
фиг. 2 иллюстрирует примерные входы и выходы компонентов системы по фиг. 1;
фиг. 3 иллюстрирует примерную таблицу базы данных, заполненную точками интереса, хранящимися в базе данных географической информации;
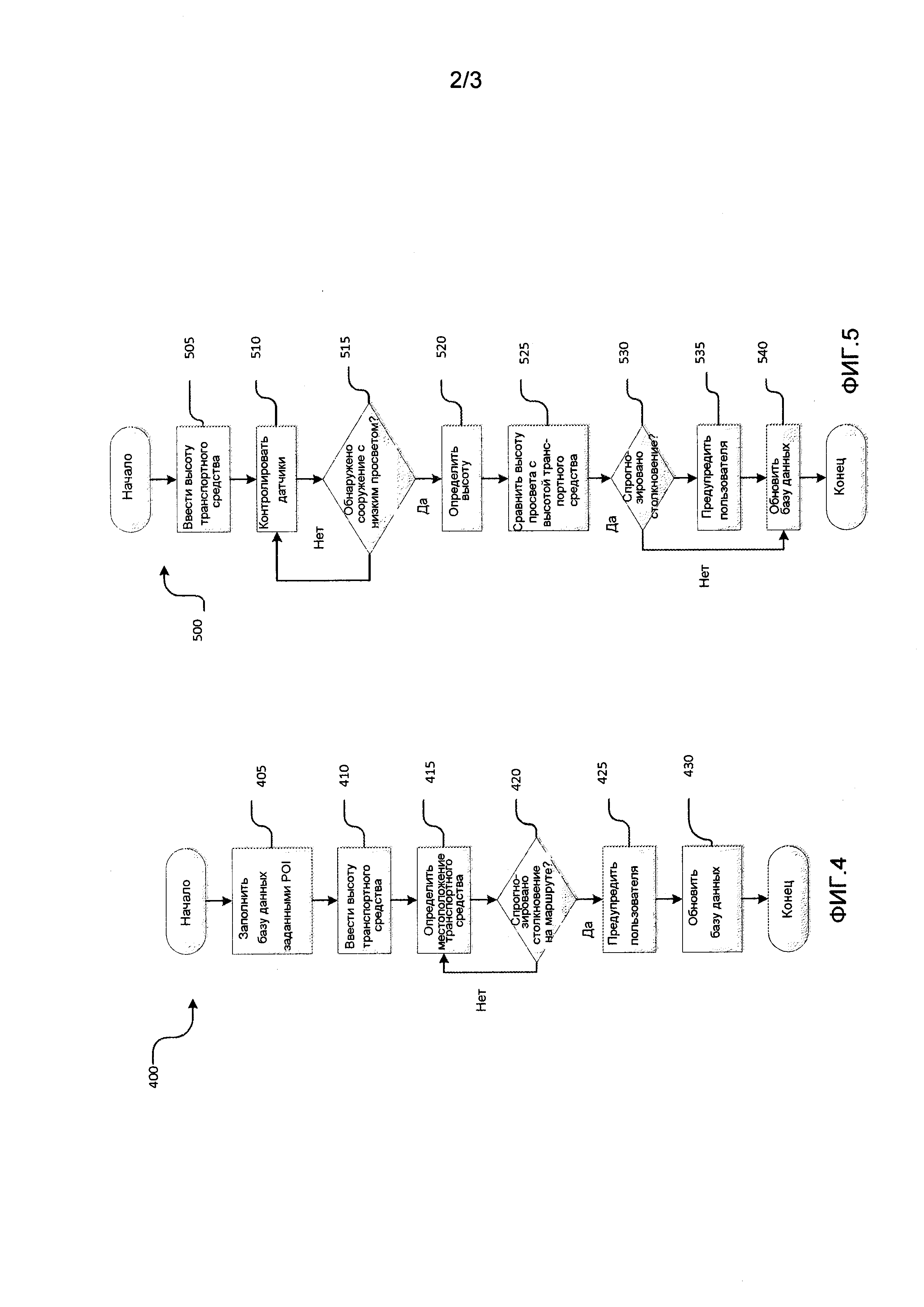
фиг. 4 иллюстрирует примерную блок-схему последовательности операций способа выдачи предупреждения в ответ на предварительно заполненные точки интереса;
фиг. 5 иллюстрирует примерную блок-схему последовательности операций способа выдачи предупреждения в ответ на обнаружение в реальном времени местоположения с низким просветом;
фиг. 6 иллюстрирует примерную блок-схему последовательности операций способа приема дистанционного сообщения, указывающего сооружение с низким просветом и выдачи оповещения о таковом; и
фиг. 7 иллюстрирует примерную блок-схему последовательности операций способа автоматизированного самообучения базы данных в ответ на обнаружение сооружения с низким просветом.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ПОЛЕЗНОЙ МОДЕЛИ
Фиг. 1 иллюстрирует примерную систему 100 для обнаружения и оповещения о местоположениях с низким просветом. Система 100 может принимать многие разные формы и может включать в себя многочисленные и/или альтернативные компоненты. Несмотря на то, что примерная система показана на фигурах, примерные компоненты, проиллюстрированные на фигурах, не подразумеваются ограничивающими. Несомненно, могут использоваться дополнительные или альтернативные компоненты и/или реализации.
Система 100 может обнаруживать приближающееся сооружение с низким просветом, сохранять местоположение и высоту просвета сооружения наряжу с другими заданными сооружениями с низким просветом, и оповещать пользователя транспортного средства о потенциально возможном столкновении в ответ на введенную высоту транспортного средства и обнаружение в реальном времени сооружений с низким просветом. Сооружение с низким просветом или сооружение может включать в себя низкие навесы, мосты, туннели, эстакады, входы/выходы сооружений для парковки, ветви деревьев и свешивающиеся светофоры на перекрестках. Система 100 может заполнять базу данных обнаруженными сооружениями с низким просветом для будущего обращения.
Система 100 может включать в себя контроллер 105 для контроля и управления различными системами и подсистемами внутри транспортного средства. Контроллер 105 может включать в себя любое вычислительное устройство, выполненное с возможностью исполнять машиночитаемые команды. Например, контроллер 105 может включать в себя процессор (не показан) и модуль (не показан). Процессор может быть объединен с или отделен от контроллера 105. В качестве альтернативы, контроллер 105 может включать в себя различные модули, каждый выполнен с возможностью поддерживать связь с процессором через шлюзовой модуль (не показан). Дополнительно или в качестве альтернативы, система 100 может включать в себя многочисленные контроллеры 105, каждый включает в себя процессор и модуль.
Вообще, вычислительные системы и/или устройства, такие как контроллер 105 и процессор, могут применять любое количество компьютерных операционных систем, в том числе, но не в качестве ограничения, версии и/или разновидности операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой корпорацией Oracle из Редвуд Шорез, штат Калифорния), операционной системы AIX UNIX, распространяемой International Business Machines из Армонка, штат Нью-Йорк, операционной системы Linux, операционной системы Mac OS X и iOS, распространяемой компанией Apple из Купертино, штат Калифорния, OS Blackberry, распространяемой Research in Motion из Ватерлоо, Канада, и операционной системы Andriod, разработанной Open Handset Alliance. Специалистам в данной области техники будет очевидно из раскрытия, что точные аппаратные средства и программное обеспечение контроллера 105 и процессора могут быть любой комбинацией, достаточной для выполнения функций вариантов осуществления, обсужденных в материалах настоящего описания.
Контроллер 105 может быть выполнен с возможностью определять высоту транспортного средства посредством пользовательского ввода через пользовательский интерфейс 110. Пользовательский интерфейс 110 может включать в себя однотипное устройство отображения (например, сенсорный экран) или многочисленные типы устройств отображения (например, звуковые и визуальные), сконфигурированные для человеко-машинного взаимодействия. Пользовательский интерфейс 110 может быть выполнен с возможностью принимать пользовательские входные сигналы от пассажиров транспортного средства. Пользовательский интерфейс 110, например, может включать в себя кнопки управления и/или кнопки управления, отображаемые на устройстве отображения с сенсорным экраном (например, аппаратные кнопки и/или программные кнопки), которые дают пользователю возможность вводить команды и информацию. Входные сигналы, выдаваемые в пользовательский интерфейс 110, могут передаваться в контроллер 105 для управления различными аспектами транспортного средства. Например, входные сигналы, выдаваемые в пользовательский интерфейс 110, могут использоваться контроллером 105 для взаимодействия с навигационной системой, управления воспроизведением аудиовизуальной информации, или тому подобного. Пользовательский интерфейс 110 может включать в себя микрофон, который дает пользователю возможность устно вводить команды или другую информацию. Пользовательский интерфейс 110 дополнительно может быть выполнен с возможностью выводить команды. Например, контроллер 105 могут сообщать предупреждение на пользовательский интерфейс 110 о приближающемся сооружении с низким просветом. Более того, пользовательский интерфейс 110 может отображать (или широковещательно передавать через громкоговорители) высоту транспортного средства по требованию или другую информацию о состоянии признаков (например, прикрепленного груза, выбранного признака, и т.д.).
Пользовательский интерфейс 110 может включать в себя устройство технологии информирования и связи, такое как телематическое устройство, сотовый телефон или другие портативные или персональные цифровые устройства.
Пользовательский интерфейс 110 может содействовать объединению определенных функций регулировки или дальней связи внутри системы 100. Например, навигационная система может быть включена в пользовательский интерфейс. Навигационная система, например, может включать в себя глобальную систему определения местоположения (GPS), а также радиочастотную идентификацию (RFID), GPS сотового устройства или карманного персонального компьютера (PDA), которая передается посредством сотового телефона или PDA посредством Bluetooth®. Более того, пользовательский интерфейс 110 может содействовать связи с внешними местоположениями через сеть беспроводной связи. Например, пользовательский интерфейс 110 может поддерживать связь с внешними местоположениями через сеть беспроводной связи, такую как глобальная сеть (WAN), локальная сеть (LAN), радиочастотные (РЧ, RF) передачи или основанная на облачных вычислениях связь. Дополнительно или в качестве альтернативы, пользовательский интерфейс 110 может поддерживать связь с мобильным устройством посредством протокола Bluetooth® или других протоколов беспроводной связи, которые могут находиться на связи с внешними местоположениями.
Контроллер 105 может быть выполнен с возможностью принимать, через пользовательский интерфейс 110, пользовательский ввод, указывающий высоту транспортного средства. Пользовательский интерфейс 110 может включать в себя сенсорный экран с заданными выбираемыми вариантами (или вариантами высоты транспортного средства) на устройстве отображения пользовательского интерфейса 110. Выбираемые варианты могут включать в себя несколько стандартных вариантов выбора груза, которые, вместе с основной высотой транспортного средства, указывают общую высоту транспортного средства (например, базовую высоту транспортного средства плюс высоту груза). Например, выбираемые варианты могут включать в себя велосипед, лыжи, каноэ, байдарки, неупакованный багаж и лестницу. Если высота транспортного средства имеет значение приблизительно 60 дюймов (~152 см), выбираемый вариант для горного велосипеда может указывать общую высоту транспортного средства в качестве 122 дюймов, или ~310 см (при условии, что стандартный размер горного велосипеда имеет значение 62 дюйма или ~157 см). Пользовательский интерфейс 110 также может включать в себя приложение регулировки или программное обеспечение, работающее на внешнем и/или портативном электронном устройстве, например, компьютере или процессоре, в том числе, но не в качестве ограничения, смартфоне, планшете или дорожном компьютере. Приложение регулировки может передавать данные обратно в контроллер 105 через сеть беспроводной связи, такую как Bluetooth, глобальная сеть (WAN), локальная сеть (LAN), радиочастотные (РЧ) передачи или основанная на облачных вычислениях связь. Приложение может включать в себя функциональные возможности для конфигурирования всех выбираемых вариантов регулировки в качестве определенных сенсорным экраном. Дополнительно, приложение может предоставлять возможность сниматься фотографии транспортного средства и автоматически определять высоту груза на основании своего понимания стандартной высоты транспортного средства. Приложение может автоматически выполнять распознавание изображений самого транспортного средства, посредством электронного устройства, чтобы подтверждать, что высота транспортного средства, которую предполагает приложение, является такой же, как на фотографии.
Дополнительно, контроллер 105 может быть выполнен с возможностью добавлять некоторую добавочную высоту к базовой высоте и высоте груза для дополнительной безопасности и предосторожности (например, добавляя 8 см к общей высоте транспортного средства). Дополнительные выбираемые варианты могут вводиться и сохраняться, таким образом, предоставляя пользователю возможность самостоятельно регулировать выбираемые варианты. Выбираемые варианты дополнительно могут включать в себя стандартные высоты прицепа, такие как низкий (~6 футов/183 см), средний (~10 футов/305 см) и высокий (~13 футов/396 см) размеры прицепа. Пользовательский интерфейс 110 может быть выполнен с возможностью предоставлять возможность для самостоятельно регулируемых пользовательских входных сигналов и включать в себя раздел закладок (например, Мой груз 1, Мой груз 2, и т.д.). Например, пользователь может вводить самостоятельно настроенную запись о грузе 3′8″ (114,3 см), которая увеличивает базовую высоту просвета транспортного средства. Подобным образом, пользователь может самостоятельно регулировать или модифицировать заданные выбираемые варианты в ответ на персональные предпочтения. Например, пользователь может модифицировать заданную высоту горного велосипеда со 157 см в 147 см.
Дополнительно или в качестве альтернативы, контроллер 105 может быть выполнен с возможностью выводить автоматические подсказки для регулировок высоты транспортного средства в пользовательский интерфейс 110 в ответ на обнаружение груза или прицепа. Например, контроллер 105 может определять, что обнаружен прицеп среднего размера, через стандартные электрические соединения прицепа. Контроллер 105 затем может сообщать выбираемый вариант прицепа среднего размера в пользовательский интерфейс 110.
Контроллер 105 может находиться на связи с базой 115 данных географической информации. База 115 данных может включать в себя предварительно заполненные или заданные точки интереса (POI), указывающие сооружения с низким просветом, такие как туннели и навесы. Каждая POI или сооружение с низким просветом может быть связано с местоположением, высотой просвета, конкретной проезжей частью и направлением движения. POI могут быть предварительно загружены в базу 115 данных во время производства (например, производителем оригинального оборудования (OEM)). POI также могут обновляться последовательностью усовершенствований или обновлений, которые распространяются по пользователям посредством любых современных физических запоминающих носителей, в том числе, но не в качестве ограничения, компакт-дисков (CD), флэш-накопителей USB, SD-карт и/или цифровых многофункциональных дисков (DVD). Дополнительно или в качестве альтернативы, POI могут распространяться на базу 115 данных посредством сети беспроводной связи.
Контроллер 105 может быть выполнен с возможностью принимать различные входные сигналы и формировать и выдавать различные выходные сигналы в соответствии с принимаемыми входными сигналами или машинно-исполняемыми командами, поддерживаемыми в базе 115 данных. База 115 данных географической информации может содержать флэш-память, ОЗУ (оперативное запоминающее устройство, RAM), СППЗУ (стираемое программируемое постоянное запоминающее устройство, EPROM), ЭСППЗУ (электрически стираемое программируемое постоянное запоминающее устройство, EEPROM), накопитель на жестком диске или другой тип памяти, либо их комбинацию. Система 100 может включать в себя многочисленные базы данных, каждая выполнена с возможностью поддерживать систематизированную информацию. Например, первая база данных может поддерживать географическую информацию, тогда как вторая база данных может поддерживать запрограммированные выбираемые варианты высоты транспортного средства. База 115 данных может хранить информацию о POI, проезжих частях или навигационную информацию и сохраняемые выбираемые варианты в долговременной памяти (например, энергонезависимой памяти или KAM). Подобным образом, база 115 данных может поддерживать предупредительные сообщения, связанные с приближением POC. Например, предупреждение может появляться на пользовательском интерфейсе 110 или широковещательно передаваться через аудиосистему транспортного средства.
Дополнительно или в качестве альтернативы, база 115 данных может включать в себя удаленную базу данных (не показана), к которой множество транспортных средств может присоединяться через беспроводную сеть, такую как облачная сеть. Удаленная база данных может служить в качестве облачной инфраструктуры, в которую множество транспортных средств может передавать обновления в ответ на обнаружение новых POI и/или скорректированных высот просвета.
Контроллер 105 может поддерживать связь с множеством датчиков 120, 125. Датчики 120, 125 могут включать в себя любой датчик или систему датчиков, имеющиеся в распоряжении на транспортном средстве, которые могут использоваться для определения местоположения транспортного средства и обнаружения приближающегося сооружения с низким просветом. В качестве альтернативы, модуль может принимать входные сигналы с датчиков 120, 125, которые, в свою очередь, могут передаваться в процессор. Первый датчик 120 может включать в себя любой датчик или систему датчиков для обнаружения приближающегося сооружения с низким просветом. Например, первый датчик 120 может включать в себя оптический дальномер, работающий посредством инфракрасной (ИК, IR) триангуляции, радиолокационный (RADAR) датчик, сверхширокополосный (UWB) радиодатчик, лазерный дальнометрический датчик, беспроводный приемник, который считывает инфраструктурные широковещательные данные, датчик LIDAR или оптический локатор и видеокамеру или активный формирователь сигналов изображения (APS). Датчик 125 обнаружения сооружений с низким просветом дополнительно может быть выполнен с возможностью определять высоту сооружения с низким просветом посредством любого известного способа. Второй датчик 125 может включать в себя любой датчик определения местоположения транспортного средства, заключенный в транспортном средстве. Например, второй датчик 125 может включать в себя датчик глобальной системы определения местоположения (GPS) или датчик положения. Из раскрытия будет очевидно, что первый и второй датчики 120, 125 взаимозаменяемы, так что первый датчик 120 может включать в себя датчики обнаружения сооружения с низким просветом, а второй датчик 125 может включать в себя датчики определения местоположения транспортного средства, и наоборот.
Контроллер 105 может быть выполнен с возможностью обнаруживать приближающееся сооружение с низким просветом в ответ на первый датчик 120. Например, контроллер 105 может поддерживать связь с APS для обнаружения приближающейся низкой эстакады или туннеля. Дополнительно, первый датчик 120 может быть выполнен с возможностью распознавать дорожные знаки приближающихся сооружений с низким просветом. Контроллер 105 может быть выполнен с возможностью поддерживать связь с датчиком 120 для обновления, модификации или пополнения базы 115 данных географической информации в ответ на обнаружение сооружения с низким просветом. Контроллер 105 может формировать новую POI в ответ на выходной сигнал первого датчика 120. Например, датчик 120 может обнаруживать сооружение с низким просветом, не заданное базой 115 данных, и определять высоту сооружения с низким просветом. Контроллер 105 может поддерживать связь с вторым датчиком 125 (например, GPS) для определения местоположения сооружения с низким просветом. Контроллер 105 затем может вводить высоту просвета и местоположение сооружения в базу 115 данных для формирования новой POI. По существу, контроллер 105 может самостоятельно заполнять базу 115 данных, в то время как в пути, посредством входного сигнала первого и второго датчиков 120, 125. Дополнительно, контроллер 105 может быть выполнен с возможностью модифицировать существующие POI. Например, контроллер 105 может исправлять информацию, которая могла быть введена ошибочно или неуместно. В случае, если заданная POI записано с неправильными высотой просвета или местоположением, контроллер 105 может модифицировать POI в ответ на входной сигнал первого и второго датчиков 120, 125.
Контроллер 105 может быть выполнен с возможностью обновлять базу 115 данных географической информации в ответ на пользовательский ввод через пользовательский интерфейс 110. Пользователь может помечать или указывать часто посещаемые точки в качестве сооружения с низким просветом, тем самым, создавая POI. Подобным образом, пользователь может вводить текущее местоположение транспортного средства в качестве POI, например, в то время как транспортное средство находится внутри гаража в доме. Это может создавать новую POI, чтобы контроллер 105, посредством датчика 125 местоположения транспортного средства, в нем распознавал гараж в доме в качестве POI.
Контроллер 105 может быть выполнен с возможностью связывать высоту транспортного средства, введенную в пользовательский интерфейс 110, с высотами просвета POI для формирования точки столкновения (POC). POC может представлять высоту транспортного средства, большую, чем высота просвета POI, и включать в себя координаты GPS для местоположения такового, а также конкретную проезжую часть и направление движения. Например, если контроллер 105 выявляет пользовательский ввод, выбирающий выбираемый вариант для размера высокого прицепа (например, ~13 футов/396 см), и транспортное средство приближается к координатам GPS для POI с высотой просвета 12,5 футов/381 см, контроллер 105 может формировать POC и оповещать водителя о потенциально возможном столкновении. Дополнительно, контроллер 105 может сохранять POC, связанное с выбираемым вариантом размера высокого прицепа 115, например, в базе 115 датчика географической информации. Контроллер 105 может формировать множество РОС в ответ на ввод высоты транспортного средства в пользовательский интерфейс 110 и существующие ранее POI в базе данных.
Дополнительно, контроллер 105 может быть выполнен с возможностью выявлять потенциальные POC в реальном времени, еще не поддерживаемые в базе 115 данных, в то время как транспортное средство находится в пути в пункт назначения. Первый и второй датчики 120, 125 могут сообщать в контроллер 105, что транспортное средство приближается к сооружению с низким просветом, и определять, что высота сооружения находится ниже высоты транспортного средства, введенной в пользовательский интерфейс 110. Например, первый датчик 120 может обнаруживать эстакаду и определять высоту просвета эстакады. Контроллер 105 может сравнивать высоту просвета эстакады с высотой, введенной в пользовательский интерфейс 110. В случае, если высота транспортного средства больше, чем высота просвета эстакады, контроллер 105 может формировать POC, выдавать предупреждение в пользовательский интерфейс 110, и регистрировать, посредством второго датчика 125, местоположение транспортного средства. База 115 данных, тем самым, может сохранять POC, связанные со специфичной высотой транспортного средства, для будущего обращения.
Контроллер 105 может осуществлять доступ к базе 115 данных географической информации, чтобы отфильтровывать из рассмотрения касательно POC различные POI, которые транспортное средство вероятно не будет проходить, в ответ на текущее местоположение транспортного средства. Например, контроллер 105 может оценивать потенциальные POI в пределах заданного радиуса, такого как 20 миль, от местоположения транспортного средства. Дополнительно или в качестве альтернативы, контроллер 105 может оценивать POI на конкретной проезжей части или спрогнозированной траектории или потенциально возможного маршрута, или выбранного пользователем маршрута до целевого пункта назначения (например, пользователь вводит в навигационную систему целевой пункт назначения). После приема целевого пункта назначения, контроллер 105 может оценивать конкретные проезжие части и направления движения, включенные в выбранный пользователем маршрут, на потенциально возможные POI. В качестве альтернативы или дополнительно, контроллер 105 может использовать определение MPP из других компонентов контроллера 105 (например, навигационной базы данных, GPS, и т.д.) наряду с движением по маршруту к спрогнозированным потенциально возможным POI. Как только идентифицированы эти потенциально возможные или вероятные POI, контроллер 105 может фильтровать POI, которые отдалены от местоположения транспортного средства или не находятся на MPP в целевой пункт назначения. Таким образом, контроллер 105 может сокращать время обработки для определения POC посредством включения в состав меньшего количества POI для сравнения с высотой транспортного средства. Более того, контроллер 105 может ограничивать или предотвращать идентификацию POI, которые вероятно не должны становиться уместными для конкретной поездки.
Контроллер 105 может находиться на связи с удаленным сервером 130 через устройство 110 пользовательского интерфейса. Контроллер 105 и удаленный сервер 130 могут быть на связи через беспроводную сеть, например, LAN, WAN, WiFi или основанные на использовании облачных вычислений средства связи. Удаленный сервер 130 может включать в себя коммерческую (например, банк, ресторан, и т.д.) или правительственную организацию. Удаленный сервер 130 может передавать уместную информацию о POI, такую как высота просвета и местоположение GPS, непосредственно на пользовательский интерфейс 110. Дополнительно или в качестве альтернативы, удаленный сервер 130 может сообщать о POI в PDA или смартфон, которые затем обновляют базу 115 данных.
Контроллер 105, пользовательский интерфейс 110, база 115 данных географической информации и первый и второй датчики 120, 125 могут поддерживать связь друг с другом через интерфейс (не показан). Интерфейсы могут включать в себя систему ввода/вывода, выполненную с возможностью передавать и принимать данные из соответствующих компонентов. Интерфейс может быть однонаправленным, чтобы данные могли передаваться только в одном направлении, например, из контроллера 105 в базу 115 данных, или наоборот. В качестве альтернативы, интерфейс может быть двунаправленным, предоставляя возможность как приема, так и передачи данных между компонентами.
Со ссылкой на фиг. 2, контроллер 105 может принимать различные входные сигналы и формировать различные выходные сигналы для определения просвета приближающегося надземного сооружения. Контроллер 105 может принимать входной сигнал, указывающий высоту транспортного средства, из пользовательского интерфейса 110. Контроллер 105 также может принимать координаты GPS из второго датчика 125 и входные данные существующих POI через базу 115 данных поблизости от транспортного средства или на конкретном спрогнозированном маршруте, в то время как транспортное средство едет по маршруту. Контроллер 105 подобным образом может принимать входной сигнал, выявляющий сооружение с низким просветом и высоту просвета (с первого датчика 120), расположенное в приближающейся POI. Контроллер 105 затем может использовать входные данные, принятые из пользовательского интерфейса 110, базы 115 данных и первого и второго датчиков 120, 125, для определения потенциально возможной POC. Если высота транспортного средства больше, чем высота просвета приближающейся POI, контроллер 105 может определять, что приближающийся низкий просвет является POC. Например, если контроллер 105 выявляет пользовательский ввод, указывающий, что грузом является велосипед, имея общую высоту транспортного средства в 310 см, а высота просвета POI имеет значение 300 см, контроллер 105 может определять, что существует POC. С другой стороны, если контроллер 105 выявляет пользовательский ввод, указывающий, что грузом является байдарка, имея общую высоту транспортного средства в 190 см (базовую высоту транспортного средства 152 см, высоту байдарки 40 см), контроллер может определять, что POC не существует в том же самом POI.
Дополнительно, контроллер 105 может выводить предупреждение на пользовательский интерфейс 110 в ответ на выявление приближающейся POC. Предупреждение может выдаваться в разные моменты времени и на различных уровнях. Например, конкретный уровень предупреждения может использоваться, когда маршрут введен в навигационную систему, и другой уровень предупреждения может выдаваться, когда эвристика MPP определяет POC, в то время как транспортное средство находится в пути. Контроллер 105 затем может предлагать надлежащие действия для пользователя, такие как принятие альтернативного маршрута или немедленная остановка. Предупреждение может отображаться на устройстве отображения пользовательского интерфейса 110 или широковещательно передаваться через громкоговорители транспортного средства. Более того, контроллер 105 может быть выполнен с возможностью приводить в действие тормоза транспортного средства в ответ на выявление неизбежной POC. То есть, контроллер 105 может вводить в действие признаки безопасности транспортного средства, такие как тормоза транспортного средства, в попытке подавить столкновение. Дополнительно, контроллер 105 может обновлять базу 115 данных в ответ на обнаружение нового сооружения с низким просветом и/или выявление высоты просвета.
Кроме того, со ссылкой на фиг. 2, контроллер 105 может принимать входные данные сооружения с низким просветом с удаленного сервера 130 по сети беспроводной связи через пользовательский интерфейс 110. Удаленный сервер 130 может быть любым учреждением, которое может иметь сооружение с низким просветом. Например, удаленный сервер 130 может быть банком, предприятием быстрого питания со сквозным проездом или любой коммерческой или правительственной организацией, которым может требоваться предупреждать пользователей о сооружении с низким просветом на своем участке земли. Удаленный сервер 130 может быть выполнен с возможностью передавать предупреждение или высоту просвета посредством маяковых или радиочастотных (РЧ) передач. Удаленный сервер 130 может быть на связи с пользовательским интерфейсом 110, который, в свою очередь, поддерживает связь с контроллером 105. Контроллер 105 затем может использовать местоположение и высоту просвета удаленного сервера 130 для создания POI и сохранения POI в базе данных географической информации. Контроллер 105 может определять, что удаленный сервер 130 является приближающейся POC в ответ на высоту транспортного средства, введенную в пользовательский интерфейс 110. В случае, если высота транспортного средства больше, чем высота просвета POI удаленного сервера 130, контроллер 105 может формировать POC и предупреждать пользователя о неизбежном столкновении.
Фиг. 3 иллюстрирует примерную таблицу базы данных, заполненную POI, хранящимися в базе 115 данных географической информации. POI могут предварительно заполняться OEM или могут автоматически заполняться контроллером 105 в ответ на обнаружение новых сооружений с низким просветом. В варианте осуществления, POI может определяться наименованием местоположения (например, гараж в доме, компания McDonalds, проезд, путепровод под автомагистралью), координатами GPS (например, широтой и долготой), высотой просвета, проезжей частью, на которой расположено POI (например, Федеральная трасса №75, автострада Лейк-Шор-Драйв), и направлением, в котором движется транспортное средство (например, север, юг, восток, запад). В качестве альтернативы, база 115 данных может включать в себя многочисленные таблицы POI, классифицированные по местоположению (например, городам, муниципальным образованиям или округам), часто посещаемым, самым последним и любой их комбинации.
Как указанно ранее, POI являются местоположениями сооружений с низким просветом (например, путепроводов, мостов, ветвей деревьев, туннелей, и т.д.). Таким образом, POI применяются ко всем выбираемым вариантам независимо от высоты транспортного средства. POI всего лишь сигнализирует контроллеру 105, что приближается важное местоположение. С другой стороны, POC соотносятся с конкретными высотами транспортного средства и могут формироваться, когда контроллер 105 определяет, что приближающееся POI имеет высоту просвета, меньшую, чем или равную высоте транспортного средства (например, есть потенциальная возможность для столкновения). Таким образом, например, выбираемый вариант для высокого/большого прицепа может иметь такие же POI, как выбираемый вариант для байдарки. Однако, выбираемый вариант высокого прицепа и выбираемый вариант байдарки могут формировать отличающиеся POC. Выбираемый вариант высокого прицепа может формировать, посредством контроллера 105, РОС по мере того, как транспортное средство приближается к POI с высотой просвета, равной или ниже, чем у высоты выбираемого варианта (например, ~396 см для высокого прицепа). Подобным образом, выбираемый вариант байдарки может формировать, посредством контроллера 105, отличающиеся POC по мере того, как транспортное средство приближается к POI с высотой просвета, равной или ниже высоты выбираемого варианта байдарки (например, базовой высоты транспортного средства плюс ~40 см). Поэтому, транспортное средство может проходить под одним и тем же POI и формировать POC для одного выбираемого варианта (например, высокого прицепа), но не для другого выбираемого варианта (например, выбираемого варианта байдарки или багажной сумки).
Фиг. 4 иллюстрирует примерный способ 400 для выдачи предупреждения в ответ на предварительно заполненную базу 115 данных географической информации POI. Способ 400 может начинаться на вершине 405 блок-схемы, в какой момент, база 115 данных может включать в себя предварительно заполненные или заданные POI. Каждая POI, указывающее сооружения с низким просветом, связанные с высотами просвета, может быть предварительно загружено в базу 115 данных во время производства, например, OEM. Дополнительно, база 115 данных впоследствии может обновляться последовательностью усовершенствований через CD или DVD. Дополнительно или в качестве альтернативы, обновления могут распространяться через сеть беспроводной связи.
На этапе 410 блок-схемы, пользователь может вводить высоту транспортного средства через пользовательский интерфейс 110, тем самым, активируя систему 100 обнаружения и предупреждения. То есть, контроллер 105 может быть бдительным в отношении потенциальных POI в ответ на прием высоты транспортного средства. Пользователь может вводить стандартную высоту транспортного средства, запрограммированную пользователем высоту транспортного средства или самостоятельно настроенную высоту транспортного средства. Например, пользователь может выбирать выбираемый вариант для байдарки, велосипеда, грузового контейнера, лыж, каноэ, лестницы, неупакованного багажа, низкого прицепа, среднего прицепа, высокого прицепа или запрограммированной пользователем регулировки груза (например, Мой груз 1, Мой груз 2, и т.д.). В качестве альтернативы, пользователь может вводить самостоятельно настроенную высоту транспортного средства в случае, если требуемая высота не задана. Дополнительно, контроллер 105 может быть выполнен с возможностью добавлять заданную предохранительную или применяемую для предосторожности высоту к высоте транспортного средства, чтобы лучше давать возможность гладкого прохождения под сооружением с низким просветом.
На этапе 415 блок-схемы, контроллер 105 может определять местоположение транспортного средства посредством навигационной системы или GPS. Контроллер 105 может использовать местоположение транспортного средства в комбинации с базой 115 данных географической информации для определения дорог, проспектов и парковок, имеющих POI. По привыканию к положению транспортного средства, контроллер 105 может отфильтровывать из рассмотрения POI вне заданного радиуса, такого как 20 или 25 миль. Фильтрация POI, расположенных вне заданного радиуса, может сокращать время обработки контроллера 105. По мере того, как транспортное средство меняет положение, разные POI могут подпадать под заданный радиус. Дополнительно или в качестве альтернативы, контроллер 105 может формировать многочисленные MPP по приему запроса проведения маршрута для конкретного целевого пункта назначения через пользовательский интерфейс 110. Контроллер 105 может определять предварительно заполненные POI на каждом MPP и не принимать во внимание POI, выпадающие на расстоянии или удаленно от MPP. Последовательность операций затем может переходить на этап 420 блок-схемы.
На этапе 420 блок-схемы, контроллер 105 определяет, спрогнозировано ли столкновение на маршруте транспортного средства. Контроллер 105 может связывать высоту и местоположение транспортного средства с высотой просвета и местоположением POI, чтобы определять, вероятно ли и/или неизбежно ли столкновение. Например, контроллер 105 может формировать POC для близлежащих или соседних POI, имеющих более низкую высоту просвета, чем высота транспортного средства (например, высота транспортного средства больше, чем или равной высоте просвета). Подобным образом, контроллер 105 может формировать POC только для POI в пределах заданного радиуса или на MPP. Если POC не сформировано, например, не спрогнозировано столкновение, способ 400 может возвращаться на этап 415 блок-схемы. С другой стороны, если спрогнозировано столкновение или POC, способ 400 перейдет на этап 425 блок схемы.
На этапе 425 блок-схемы, контроллер 105 может выводить предупреждение в ответ на определение, что РОС является неизбежным или приближающимся. Предупреждение может выводиться на пользовательский интерфейс 110 через устройство отображения или звуковое устройство. Предупреждение может включать в себя предупреждение, что приближается POC. Кроме того, контроллер 105 может быть выполнен с возможностью активировать признаки безопасности в транспортном средстве, такие как нажатие тормозов транспортного средства, активизация тормозных сигналов транспортного средства, предложение обеспечивающих уклонение маневров или альтернативных маршрутов и/или активизация лампы на СИД (светоизлучающих диодах, LED) приборной панели.
На этапе 430 блок-схемы, контроллер 105 может обновлять базу 115 данных географической информации POC для конкретного выбираемого варианта (например, высоты транспортного средства). Контроллер 105 может связывать POC для выбранного выбираемого варианта с таким местоположением конкретного POI в будущем. Таким образом, контроллер 105 может обновлять базу 115 данных препятствием (или потенциально возможным препятствием). Дополнительно, база 115 данных может быть выполнена с возможностью хранить выданное предупреждение, в том числе, дату, время и местоположение, в которых предупреждение было выдано.
Фиг. 5 иллюстрирует примерный способ 500 для выдачи предупреждения в ответ на обнаружение в реальном времени местоположения с низким просветом. Способ 500 может начинаться на этапе 505 блок-схемы в ответ на выявление контроллером 150 высоты транспортного средства посредством пользовательского ввода. Как с вершиной 410 блок-схемы последовательности 400 операций, система 100 обнаружения и предупреждения может активировать, по приему пользовательского ввода через пользовательский интерфейс 110, выбор выбираемого варианта для высоты транспортного средства.
На этапе 510 блок-схемы, контроллер 105 может контролировать датчики 120, 125. Контроллер 105 может контролировать датчики 120 обнаружения объектов, такие как, в числе прочих, оптический дальномер, датчик RADAR, датчик UWB и APS, датчик LIDAR. Дополнительно, контроллер 105 может контролировать местоположение транспортного средства посредством датчиков 125 навигационной системы или GPS. Контроллер 105 может непрерывно контролировать датчики 120, 125, в то время как активирована система 100 обнаружения и предупреждения.
На этапе 515 блок-схемы, датчики 120 обнаружения объектов могут исследовать окружающую среду на любые указания, что сооружение с низким просветом является надвигающимся или приближающимся. Чтобы классифицироваться в качестве сооружения с низким просветом, высота просвета может быть предварительно запрограммирована в базу 115 данных или может самостоятельно регулироваться пользователем транспортного средства. Например, чтобы сооружение было классифицировано в качестве сооружения с низким просветом, высота просвета может быть меньшей, чем 18 футов. Датчики 120 могут сканировать приближающуюся эстакаду, такую как туннель, мост, навес, гаражные ворота, въезд в сооружение для парковки, и т.д., для определения, является ли эстакада сооружением с низким просветом. Подобным образом, датчики 120 могут быть выполнены с возможностью распознавать предупреждения дорожных знаков относительно приближающегося сооружения с низким просветом, например, знака, указывающего, что эстакада впереди имеет высоту просвета 15′6″. Дополнительно, датчики 120 могут быть выполнены с возможностью распознавать простые или природные объекты, такие как низкие ветви деревьев, посредством камеры или APS 120. По распознаванию приближающегося сооружения, если контроллер 105 определяет, что сооружение или объект не является сооружением с низким просветом, способ 500 возвращается на этап 510 блок-схемы. С другой стороны, если контроллер 105 определяет, посредством датчиков 120, что приближающееся сооружение является сооружением с низким просветом, способ 500 может переходить на этап 520 блок-схемы.
На этапе 520 блок-схемы, может определяться высота просвета сооружения с низким просветом. Датчики 120 могут быть выполнены с возможностью измерять вертикальное расстояние, или высоту, проема приближающегося сооружения с низким просветом. Например, датчик 120 LIDAR может нацеливаться на проем туннеля с низким просветом и анализировать отраженный свет. Подобным образом, датчик 120 RADAR или ИК может определять высоту просвета приближающегося навеса. Подобным образом, система визуального распознавания может использовать известные расстояния визуальных ориентиров для сравнения с проемом просвета и измерения высоты просвета соответствующим образом. Специалист в данной области техники поймет, что способ, применяемый для определения вертикальной высоты низкого просвета, может быть любым способом, используемым для определения расстояния вертикального просвета приближающегося объекта. Как только контроллер 105, посредством датчиков 120, определяет высоту просвета приближающегося сооружения с низким просветом, способ 500 может переходить на этап 525 блок-схемы.
На этапе 525 блок-схемы, контроллер 105 может сравнивать высоту просвета приближающегося сооружения с высотой транспортного средства, введенной пользователем. Например, если контроллер 105 выявляет пользовательский ввод через пользовательский интерфейс 110 высоты транспортного средства в 10 футов (~4,57 метров), контроллер 105 может сравнивать такую высоту с высотой просвета, выявленной датчиками 120. Способ 500 затем перейдет на этап 530 блок-схемы.
На этапе 530 блок-схемы, контроллер 105 может определять, спрогнозировано ли столкновение с приближающимся сооружением с низким просветом. Если высота транспортного средства (в том числе, добавленная предохранительная или применяемая для предосторожности высота) меньше, чем высота просвета, способ 500 может переходить на этап 540 блок-схемы. С другой стороны, если высота транспортного средства больше, чем или равной высоте просвета, контроллер 105 будет формировать POC для местоположения. Способ 500 затем может переходить на этап 535 блок-схемы.
На этапе 535 блок-схемы, контроллер 105 может выдавать предупреждение через пользовательский интерфейс 110 о неизбежном столкновении. Контроллер 105, например, дополнительно может активировать признаки безопасности, такие как тормоза транспортного средства, тормозные сигналы и/или внутренние лампы.
На этапе 540 блок-схемы, контроллер 105 может обновлять базу 115 данных географической информации новым сооружением с низким просветом. Контроллер 105 может определять местоположение сооружения с низким просветом посредством датчика 125 положения транспортного средства и высоту просвета для создания POI. Кроме того, если прохождение снизу является успешным, например, не создано POC, контроллер 105 может связывать местоположение POI и выбранную высоту транспортного средства, как ясно, для будущего обращения. Таким образом, следующий раз, когда транспортное средство приближается к POI при той же самой высоте транспортного средства, контроллер 105 может быстро определять, что столкновение не может произойти. Наоборот, если POC было выдано для местоположения и выбранной высоты транспортного средства, контроллер 105 может быть выполнен с возможностью обновлять базу 115 данных в качестве местоположения препятствия или столкновения. Контроллер 105 может заполнять базу 105 данных созданными POC, связанными с конкретным выбираемым вариантом высоты транспортного средства для будущего обращения. Контроллер 105, кроме того, может записывать дату, время, идентификатор проезжей части, направление движения и местоположение GPS выданного предупреждения.
Фиг. 6 иллюстрирует примерный способ 600 для приема дистанционного сообщения, указывающего сооружение с низким просветом и выдачи оповещения о таковом. Способ 600 может начинаться на этапе 605 блок-схемы по приему пользовательского ввода, указывающего высоту транспортного средства. Контроллер 105 может активировать систему 100 обнаружения и предупреждения в ответ на выбор пользователем выбираемого варианта, указывающего высоту транспортного средства. Как только система 100 активирована, способ 600 может переходить на этап 610 блок-схемы.
На этапе 610 блок-схемы, контроллер 105 может принимать удаленная POI, в том числе, местоположение и высоту просвета, через пользовательский интерфейс 110. Удаленная POI может передаваться удаленным сервером 130 который может включать в себя коммерческое или общественное заведение, имеющее сооружение с низким просветом, такое как банкомат на сквозном проезде через банк или общественная автостоянка. Удаленный сервер 130 может широковещательно передавать сообщение WiFi, Bluetooth или другое радиосообщение, в котором телематическое устройство транспортного средства (например, пользовательский интерфейс 110) или смартфон может ловить сигнал, когда в пределах удаленной работы.
На этапе 615 блок-схемы, контроллер 105 может обновлять базу 115 данных географической информации POI удаленного сервера. База 115 данных может поддерживать наименование коммерческого предприятия, высоту просвета, проезжую часть, адрес, направление движения, текстовое описание и координаты GPS сооружения с низким просветом, описанного сообщением с удаленного сервера 130. Таким образом, может создаваться новая POI.
На этапе 620 блок-схемы, контроллер 105 может контролировать положение транспортного средства посредством датчиков 125 определения местоположения. Контроллер 105 может контролировать положение транспортного средства относительно координат POI удаленного сервера 130 или MPP, чтобы определять, вероятен ли обмен. Например, контроллер 105 может определять, является ли транспортное средство всего лишь проезжающим удаленный сервер 130 по дороге, или на самом деле повернуло на парковку. Многочисленные датчики 120, 125 могут помогать в этом определении. Например, контроллер 105 может контролировать скорость транспортного средства, чтобы определять, должно ли транспортное средство вероятно пересечься POI удаленного сервера 130. То есть, если транспортное средство движется на этапе 30 милях в час, в то время как оно приближается к POI удаленного сервера (например, банку со сквозным проездом), контроллер 105 может определять, что транспортное средство не свернуло на парковку, хотя координаты GPS указывают, что оно на данный момент проезжает въезд. Когда контроллер 105 производит определение, что транспортное средство находится в непосредственной близости от или на пересекающем курсе у сооружения с низким просветом, описанного удаленным сервером 130, контроллер 105 может начинать анализ высоты транспортного средства по сравнению с POI удаленного сервера. Способ 600 затем может переходить на этап 625 блок-схемы.
На этапе 625 блок-схемы, контроллер 105 может выявлять, вероятно ли столкновение, в ответ на высоту транспортного средства и высоту просвета POI. Если высота транспортного средства ниже высоты просвета, столкновение вероятно не должно происходить, и способ 600 может возвращаться на этап 610 блок-схемы. Контроллер 105, кроме того, может обновлять базу 115 данных для отражения уверенного проезда под просветом POI при конкретной высоте транспортного средства (например, связывать выбираемый вариант и POI для указания безопасного проезда снизу). С другой стороны, если контроллер 105 определяет, что высота транспортного средства больше, чем или равной высоте просвета POI, контроллер 105 может определять, что столкновение неизбежно, и формировать POC.
На этапе 630 блок-схемы, контроллер 105 может выдавать предупреждение в ответ на формирование POC. Предупреждение может указывать, что столкновение является вероятным, и транспортное средство должно остановиться или развернуться. Дополнительно, контроллер 105 может активировать признаки безопасности транспортного средства для подавления какого бы то ни было столкновения.
На этапе 635 блок-схемы, контроллер 105 может обновлять базу 115 данных для отражения точки столкновения в местоположении, привязанном к конкретной высоте транспортного средства. Таким образом, контроллер 105 может получать справку в будущем, что местоположение, с высотой транспортного средства, формирует POC. Кроме того, контроллер 105 может сохранять в базе 115 данных выданное предупреждение, в том числе, время, дату и местоположение.
Фиг. 7 иллюстрирует примерный способ 700 автоматизированного самообучения базы 115 данных в ответ на обнаружение сооружения с низким просветом. Другими словами, способ 700 самообучения может исправлять ошибочно введенные данные, например, неточные высоты просвета или местоположения, изначально хранимые в базе 115 данных. Последовательность операций может начинаться на этапе 705 блок-схемы, в которой система 100 активируется посредством приема высоты транспортного средства.
На этапе 710 блок-схемы, контроллер 105 может определять местоположение транспортного средства посредством датчика 125 положения транспортного средства. Контроллер 105 может связывать местоположение транспортного средства с заполненными POI в базе данных, чтобы определять, близки ли потенциальные точки препятствия. Контроллер 105 может определять, находится ли какое-нибудь из POI на MPP или в пределах заданного радиуса от транспортного средства.
На этапе 715 блок-схемы, может обнаруживаться сооружение с низким просветом. Контроллер 105 может обнаруживать сооружение с низким просветом, которое находится в непосредственной близости от транспортного средства в ответ на датчики 125 положения транспортного средства. Подобным образом, датчики 120 обнаружения объектов могут указывать, что приближается непомеченное сооружение с низким просветом (например, которое не установлено в базе 115 данных).
На этапе 720 блок-схемы, контроллер 105, посредством датчиков 120, может определять высоту просвета сооружения с низким просветом. Если сооружение с низким просветом заполнено ранее в базе 115 данных, контроллер 105 может сравнивать записанную высоту просвета с выявленной высотой просвета, чтобы убеждаться, что высоты совпадают. Наоборот, если сооружение с низким просветом не заполнено в базе 115 данных, датчики 125 могут определять вертикальную высоту просвета. Контроллер 105 может связывать высоту просвета с высотой транспортного средства, чтобы определять, неизбежно ли столкновение. Если записанная высота просвета и выявленная высота не совпадают, или выявленная высота просвета близка к высоте транспортного средства, способ 700 может переходить на этап 725 блок-схемы.
На этапе 725 блок-схемы, контроллер 105 может выдавать предупреждение о возможном столкновении в ответ на приближающееся сооружение с низким просветом. Это предупреждение может выдаваться в первый раз, когда транспортное средство приближается к местоположению с выбранной высотой транспортного средства. Предупредительный сигнал может быть преимущественно предостерегающим, так как система 100 незнакома с конкретными местоположением POI и высотой просвета.
На этапе 730 блок-схемы, контроллер 105 может контролировать проход под сооружением с низким просветом. То есть, по мере того, как транспортное средство приближается к сооружению с низким просветом, датчики 120 обнаружения объектов могут контролировать высоту просвета и определять правильную высоту вертикального просвета. Подобным образом, датчики 125 местоположения могут контролировать координаты GPS транспортного средства. Контроллер 105 может продолжать контролировать проход снизу до тех пор, пока транспортное средство не проходит успешно под сооружением с низким просветом на этапе 735 блок-схемы. Например, контроллер 105 может контролировать характеристики сооружения с низким просветом (например, вертикальную высоту и местоположение) на всем протяжении прохождения снизу. Как только прохождение снизу является успешным, способ 700 может переходить на этап 740 блок-схемы.
На этапе 740 блок-схемы, контроллер 105 может обновлять базу 115 данных географической информации выявлениями, принятыми во время прохождения снизу. Таким образом, если база 115 данных была неправильно заполнена ошибочными данными POI (например, неправильными координатами GPS или высотой просвета), информация может обновляться ради более достоверных данных. Кроме того, база 115 данных может обновляться, чтобы отражать успешное прохождение снизу, относящееся к POI, и выбранную высоту транспортного средства, таким образом, указывая свободный проезд для будущего обращения. Контроллер 105 может ожидать повторных выявлений до обновления базы 115 данных или, в некоторых вариантах осуществления, может выдавать запрос подтверждения пользователю, ища подтверждения, что данные POI в самом деле ошибочны, и содействовать исправлению соответствующим образом.
Вычислительные устройства, такие как контроллер, обычно включают в себя машинно-исполняемые команды, где команды могут быть приводимыми в исполнение одним или более вычислительных устройств, таких как перечисленные выше. Машинно-исполняемые команды могут компилироваться или интерпретироваться из компьютерных программ, созданных с использованием многообразия языков и/или технологий программирования, в том числе, но не в качестве ограничения, и в одиночку или в комбинации, Java, С, С++, Visual Basic, Java Script, Perl, и т.д. Вообще, процессор (например, микропроцессор) принимает команды, например, из памяти, машиночитаемого носителя, и т.д., и исполняет эти команды, тем самым, выполняя одну или более последовательностей операций, в том числе, одну или более из последовательностей операций, описанных в материалах настоящего описания. Такие команды и другие данные могут храниться и передаваться с использованием многообразия машиночитаемых носителей.
Машиночитаемый носитель (также указываемый ссылкой как читаемый процессором носитель) включает в себя любой постоянный (например, материальный) носитель, который участвует в предоставлении данных (например, команд), которые могут считываться компьютером (например, процессором компьютера). Такой носитель может принимать многие формы, в том числе, но не в качестве ограничения, энергонезависимые носители, энергозависимые и энергозависимые носители. Энергонезависимые носители, например, могут включать в себя оптические или магнитные диски и другую устойчивую память. Энергозависимые носители, например, могут включать в себя динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Такие команды могут передаваться посредством одной или более сред передачи, в том числе, коаксиальных кабелей, медных проводов и волоконной оптики, в том числе, проводов, которые содержат системную шину, присоединенную к процессору компьютера. Обычные формы машиночитаемых носителей, например, включают в себя дискету, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM (постоянное запоминающее устройство (ПЗУ) на компакт-диске), DVD (цифровой многофункциональный диск), любой другой оптический носитель, перфокарты, бумажную ленту, любой другой физический носитель со схемой расположения отверстий, ОЗУ (оперативное запоминающее устройство, RAM), ППЗУ (программируемое ПЗУ, PROM), СППЗУ (стираемое программируемое ПЗУ, EPROM), флэш-память/ЭСППЗУ (FLASH-EEPROM (электрически стираемое программируемое ПЗУ)), любые другие микросхему или картридж памяти, или любой другой носитель, с которого компьютер может осуществлять считывание.
Базы данных, репозитории данных или другие хранилища данных, описанные в материалах настоящего описания, могут включать в себя различные виды механизмов для хранения, осуществления доступа и извлечения различных видов данных, в том числе, иерархическую базу данных, набор файлов в файловой системе, прикладную базу данных в пользовательском формате, систему управления реляционной базой данных (RDBMS), и т.д. Каждое такое хранилище данных, обычно включено в вычислительное устройство, применяющее операционную систему компьютера, такую как указанные выше, и подвергается доступу через сеть любым одним или более из многообразия способов. Файловая система может быть доступна из операционной системы компьютера и может включать в себя файлы, хранимые в различных форматах. RDBMS обычно использует язык структурированных запросов (SQL) в дополнение к языку для создания, сохранения, редактирования и выполнения хранимых процедур, такому как язык PL/SQL, указанный выше.
В некоторых примерах, элементы системы могут быть реализованы в качестве машиночитаемых команд (например, программного обеспечения) на одном или более вычислительных устройств (например, серверов, персональных компьютеров, и т.д.), хранимых на машиночитаемых носителях, связанных с ними (например, дисках, устройствах памяти, и т.д.). Компьютерный программный продукт может содержать такие команды, хранимые на машиночитаемых носителях, для выполнения функций, описанных в материалах настоящего описания.
Что касается последовательностей операций, систем, способов, эвристических правил, и т.д., описанных в материалах настоящего описания, следует понимать, что, хотя этапы таких последовательностей операций, и т.д., были описаны в качестве происходящих согласно определенной упорядоченной последовательности, такие последовательности операций могли бы быть осуществлены на практике с описанными этапами, выполняемыми в порядке, ином, чем порядок, описанный в материалах настоящего описания. Кроме того, следует понимать, что некоторые этапы могли бы выполняться одновременно, что могли бы быть добавлены другие этапы, или что некоторые этапы, описанные в материалах настоящего описания, могли бы быть опущены. Другими словами, описания способов в материалах настоящего описания предоставлены с целью иллюстрации некоторых вариантов осуществления и никоим образом не должны толковаться, чтобы ограничивать формулу полезной модели.
Соответственно, следует понимать, что вышеприведенное описание подразумевается иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, иные чем предоставленные примеры, были бы очевидны по прочтению вышеприведенного описания. Объем не должен определяться со ссылкой на вышеприведенное описание, но взамен, должен определяться со ссылкой на прилагаемую формулу полезной модели наряду с полным объемом эквивалентов, на которые дано право такой формуле полезной модели. Ожидается и подразумевается, что будущие развития будут происходить в технологиях, обсужденных в материалах настоящего описания, и что раскрытые системы и способы будут заключены в таких будущих вариантах осуществления. В целом, следует понимать, что заявка является допускающей модификацию и изменение.
Все термины, используемые в формуле полезной модели, подразумеваются обусловленными своими наиболее свободными расширительными толкованиями и своими обычными значениями в качестве понятных сведущим в технологиях, описанных в материалах настоящего описания, если в материалах настоящего описания не приведено явное указание на иное. В частности, использование слов «первый», «второй», и т.д., может быть взаимозаменяемым.
Реферат
1. Система транспортного средства для обнаружения местоположений с низким просветом, содержащая:контроллер, выполненный с возможностью:осуществления доступа к базе данных географической информации, выполненной с возможностью хранения множества заданных точек интереса, определенных высотой просвета;осуществления связи с первым датчиком для обнаружения сооружения с низким просветом;определения посредством второго датчика местоположения сооружения с низким просветом; иобновления базы данных географической информации местоположением сооружения с низким просветом для формирования новой точки интереса.2. Система по п. 1, в которой контроллер выполнен с возможностью:определения посредством первого датчика высоты сооружения с низким просветом; иобновления точки интереса, связанной с местоположением сооружения с низким просветом, хранящимся в базе данных географической информации, высотой сооружения с низким просветом.3. Система по п. 1, в которой контроллер выполнен с возможностью:приема пользовательского ввода через интерфейс пользователя, выбирающего вариант высоты транспортного средства, указывающий высоту транспортного средства,связывания высоты транспортного средства с высотой просвета точки интереса в пределах заданного радиуса; иформирования точек столкновения в ответ на высоту транспортного средства и высоту просвета, в которых высота транспортного средства больше, чем высота просвета точки интереса.4. Система по п. 3, в которой контроллер выполнен с возможностью подачи команды пользовательскому интерфейсу выводить предупреждение в ответ на приближение к точкам столкновения.5. Система по �
Формула

Комментарии