Система определения обновления карт - RU2642547C1
Код документа: RU2642547C1
Чертежи





Описание
Уровень техники
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к системе определения обновления карт, которая определяет необходимость обновления картографической информации.
2. Описание предшествующего уровня техники
[0002] Публикация заявки на патент (Япония) номер 2002-116689 (JP 2002-116689 А) известна как технический документ, связанный с устройством, которое определяет необходимость обновления картографической информации. JP 2002-116689 А раскрывает систему предоставления картографической информации для предоставления картографической информации в ответ на запрос из транспортного средства. Эта система получает данные траектории, связанные с траекторией, по которой движется транспортное средство, с тем чтобы обновлять картографическую информацию. В этой системе предоставления картографической информации картографическая информация обновляется с использованием данных траектории, рассматриваемыми в качестве информации новой дороги, когда дорога соответствует данным траектории, не заданным в картографической информации в случае, если данные траектории получены из транспортного средства.
[0003] В последние годы происходит постоянное совершенствование управления автоматическим вождением, которое позволяет транспортному средству двигаться без операции вождения, выполняемой водителем. Надлежащая картографическая информация требуется для выполнения управления автоматическим вождением. Тем не менее, в системе предоставления картографической информации согласно предшествующему уровню техники, описанной выше, не предложено ничего относительно способа обновления для случая, в котором картографическая информация становится устаревшей вследствие топографических изменений (например, ширины полосы движения и кривизны дороги), обусловленных строительными работами и т.п. В случае, если обновление карт выполняется один раз в каждый некоторый период времени на основе определения того, что картографическая информация становится устаревшей, затраты на поддержание картографической информации увеличиваются, если этот некоторый период времени является коротким. Если этот некоторый период времени является длительным, напротив, картографическая информация может становиться устаревшей картографической информацией, неподходящей для управления автоматическим вождением. В этом отношении требуется технология, которая обеспечивает возможность определения необходимости обновления картографической информации в надлежащее время в ходе управления автоматическим вождением, для исключения этих вероятностей.
Сущность изобретения
[0004] Аспект изобретения предусматривает систему определения обновления карт, которая способна выполнить надлежащее определение необходимости обновления картографической информации посредством использования управления автоматическим вождением для транспортного средства.
[0005] Согласно первому аспекту изобретения, предусмотрена система определения обновления карт, содержащая картографическую базу данных, в которой сохраняется картографическая информация, используемая для управления автоматическим вождением для транспортного средства, и определяющая для каждой области, заданной заранее, необходимости обновления картографической информации в области, заданной заранее, причем система определения обновления карт включает в себя модуль формирования плана движения, формирующий, на основе целевого маршрута транспортного средства, заданного заранее, и картографической информации, план движения транспортного средства, включающий в себя целевое значение управления для транспортного средства в соответствии с позицией на целевом маршруте, модуль получения значений обнаружения, получающий, в ассоциации с позицией на целевом маршруте, значение обнаружения результатов управления, получающееся в результате управления автоматическим вождением для транспортного средства, выполняемого на основе дорожного окружения около транспортного средства, распознанного посредством использования внешнего датчика транспортного средства, состояния движения транспортного средства, распознанного посредством использования внутреннего датчика транспортного средства, позиции транспортного средства, измеряемой посредством модуля измерения позиции транспортного средства, и плана движения, модуль вычисления значений оценки, вычисляющий значение оценки плана движения для области на основе результата сравнения между целевым значением управления и значением обнаружения результатов управления, и модуль определения обновления карт, определяющий необходимость обновления картографической информации относительно области на основе значения оценки плана движения и порогового значения оценки.
[0006] В системе определения обновления карт согласно аспекту изобретения, целевое значение управления плана движения в зависимости от картографической информации и значение обнаружения результатов управления, получающееся в результате управления автоматическим вождением в соответствии с фактическим дорожным окружением, отличаются друг от друга в случае, если картографическая информация является несогласованной с фактическим дорожным окружением, и ввиду этого необходимость обновления картографической информации относительно области может определяться на основе значения оценки плана движения для области, вычисленного из результата сравнения между целевым значением управления и значением обнаружения результатов управления, и порогового значения оценки. Следовательно, согласно системе определения обновления карт, надлежащее определение необходимости обновления картографической информации может выполняться посредством использования управления автоматическим вождением для транспортного средства.
[0007] Согласно второму аспекту изобретения предусмотрена система определения обновления карт, содержащая сервер, способный к обмену данными с транспортным средством, выполняющим управление автоматическим вождением, и картографическую базу данных, расположенную на сервере, причем картографическая информация сохраняется в картографической базе данных и определяет необходимость обновления картографической информации в области, заданной заранее, причем система определения обновления карт включает в себя модуль получения информации, расположенный на сервере и получающий информацию относительно целевого маршрута транспортного средства, модуль формирования моделированного плана движения, расположенный на сервере и формирующий, на основе целевого маршрута и картографической информации картографической базы данных, моделированный план движения транспортного средства, включающий в себя моделированное целевое значение управления для транспортного средства в соответствии с позицией на целевом маршруте, модуль получения значений обнаружения, расположенный на сервере и получающий, в ассоциации с позицией на целевом маршруте, значение обнаружения результатов управления, получающееся в результате управления автоматическим вождением для транспортного средства, выполняемого на основе дорожного окружения около транспортного средства, распознанного посредством использования внешнего датчика транспортного средства, состояния движения транспортного средства, распознанного посредством использования внутреннего датчика транспортного средства, позиции транспортного средства, измеряемой посредством модуля измерения позиции транспортного средства, и плана движения транспортного средства, сформированного из целевого маршрута и картографической информации бортовой картографической базы данных, расположенной в транспортном средстве, модуль вычисления значений оценки, расположенный на сервере и вычисляющий значение оценки моделированного плана движения для области на основе результата сравнения между моделированным целевым значением управления и значением обнаружения результатов управления, и модуль определения обновления карт, расположенный на сервере и определяющий необходимость обновления картографической информации картографической базы данных относительно области на основе значения оценки моделированного плана движения и порогового значения оценки.
[0008] В системе определения обновления карт согласно аспекту изобретения, моделированное целевое значение управления моделированного плана движения в зависимости от картографической информации и значение обнаружения результатов управления, получающееся в результате управления автоматическим вождением в соответствии с фактическим дорожным окружением, отличаются друг от друга в случае, если картографическая информация картографической базы данных, имеющей сервер, является несогласованной с фактическим дорожным окружением, и ввиду этого необходимость обновления картографической информации относительно области может определяться на основе значения оценки моделированного плана движения для области, вычисленного из результата сравнения между моделированным целевым значением управления и значением обнаружения результатов управления, и порогового значения оценки. Следовательно, согласно этой системе определения обновления карт, надлежащее определение необходимости обновления картографической информации может выполняться посредством использования управления автоматическим вождением для транспортного средства.
[0009] В системе определения обновления карт согласно первому аспекту или второму аспекту изобретения, модуль определения обновления карт может задавать пороговое значение оценки для области на основе позиции области в картографической информации картографической базы данных или времени движения транспортного средства в области. Согласно этой системе определения обновления карт, надлежащее определение необходимости обновления картографической информации в соответствии с позицией области может выполняться посредством задания порогового значения оценки для области на основе позиции области, так что более высокий уровень точности картографической информации требуется для области в городе, чем для пригородной области. Альтернативно, согласно этой системе определения обновления карт, надлежащее определение необходимости обновления картографической информации в соответствии со временем движения может выполняться посредством задания порогового значения оценки для области на основе времени движения транспортного средства в области, так что точность распознавания линий дорожной разметки с использованием изображения, захваченного посредством камеры и т.п., уменьшается больше ночью, чем днем, и это влияет на надежность определения необходимости обновления картографической информации.
[0010] Согласно первому аспекту или второму аспекту изобретения, может предусматриваться система определения обновления карт, которая способна выполнить надлежащее определение необходимости обновления картографической информации посредством использования управления автоматическим вождением для транспортного средства.
Краткое описание чертежей
[0011] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является блок-схемой, иллюстрирующей систему автоматического вождения, включающую в себя систему определения обновления карт согласно первому варианту осуществления;
Фиг. 2 является схемой для показа примера области в качестве объекта определения обновления картографической информации;
Фиг. 3 является схемой для показа другого примера области в качестве объекта определения обновления картографической информации;
Фиг. 4 является видом сверху для показа ситуации, в которой существует разность между целевой поперечной позицией плана движения и поперечной позицией результата управления, получающейся в результате управления автоматическим вождением;
Фиг. 5A является блок-схемой последовательности операций способа, иллюстрирующей обработку формирования плана движения;
Фиг. 5B является блок-схемой последовательности операций способа, иллюстрирующей управление автоматическим вождением;
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей обработку получения значений обнаружения результатов управления;
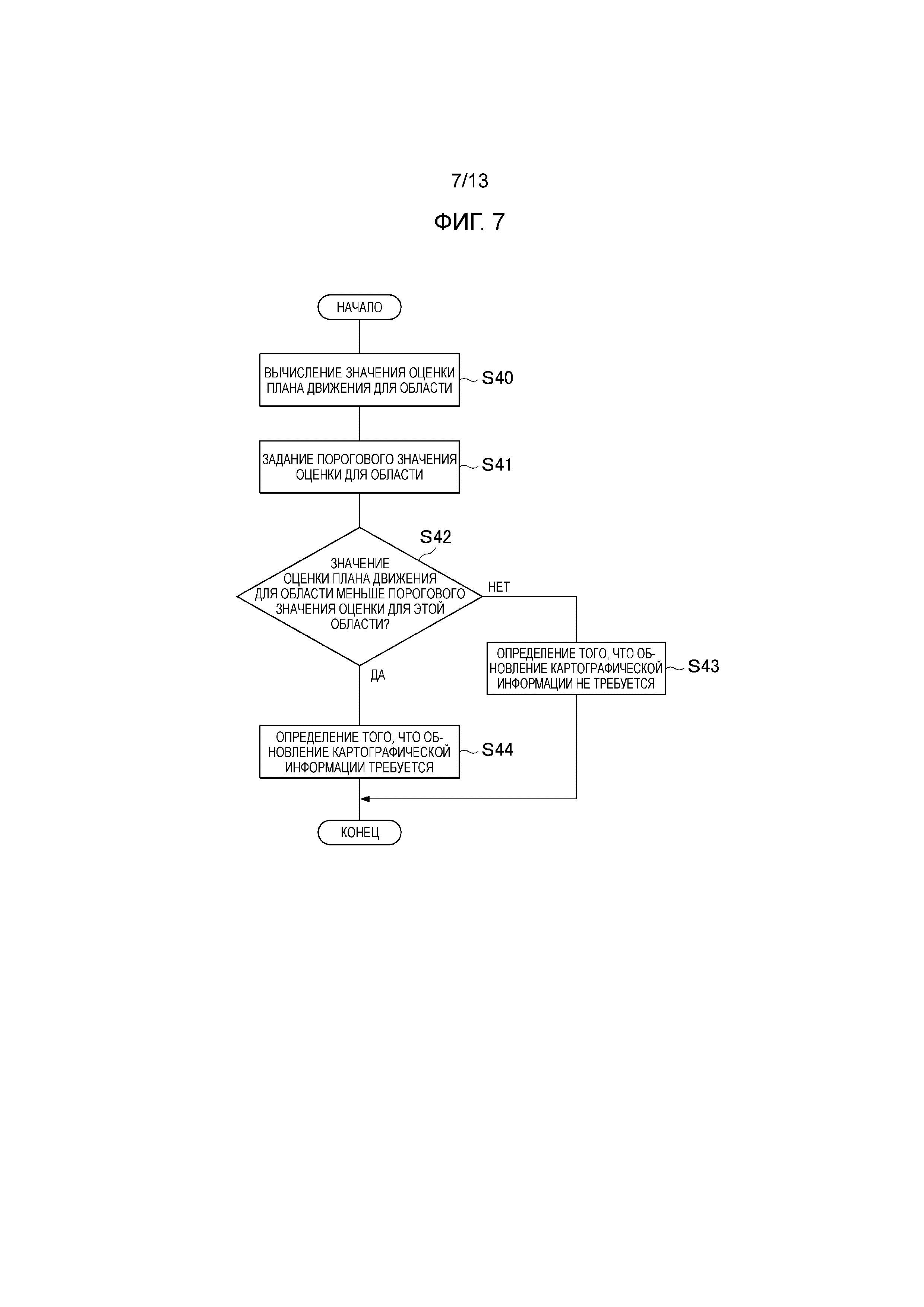
Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей обработку определения обновления карт;
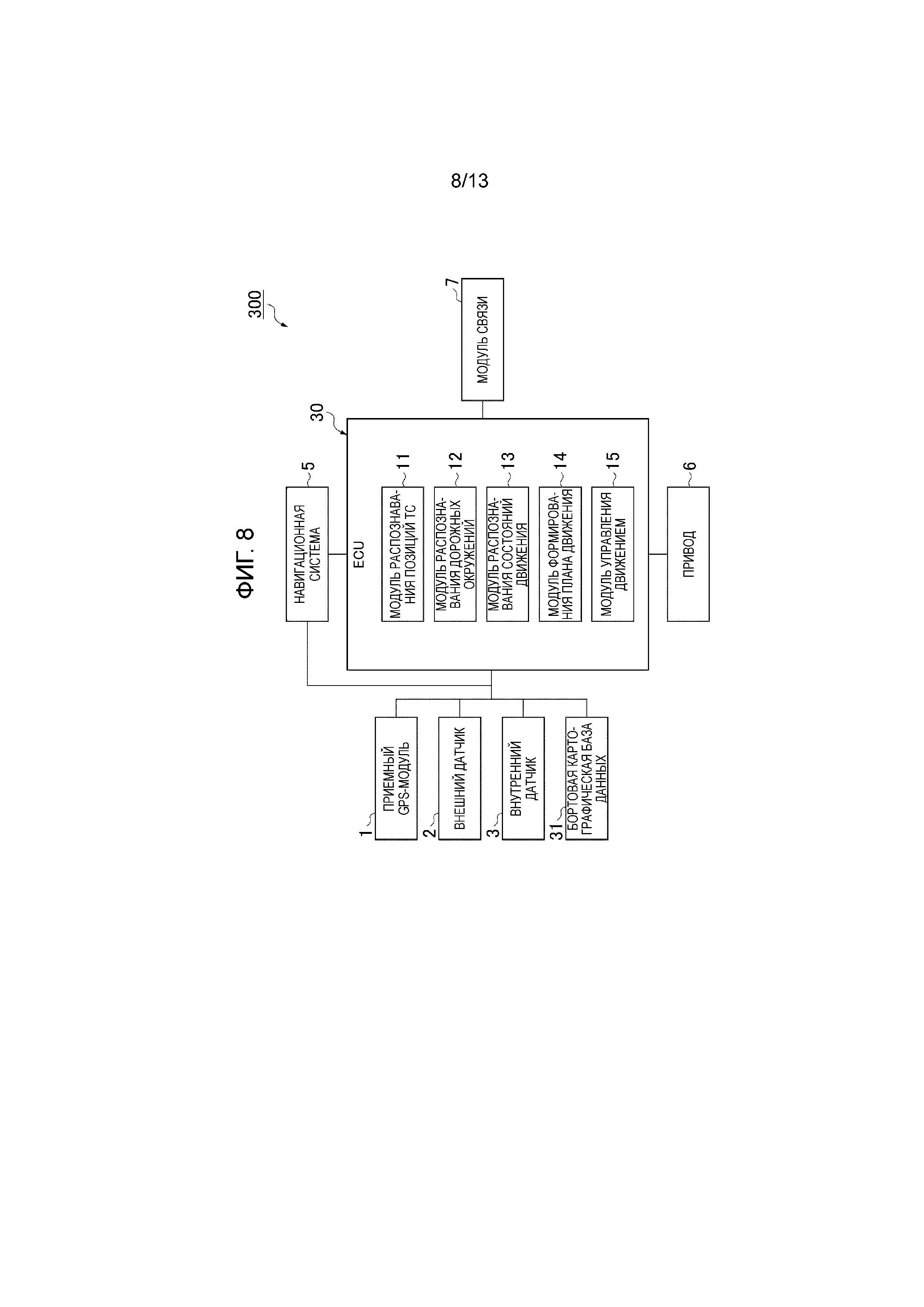
Фиг. 8 является блок-схемой, иллюстрирующей систему автоматического вождения согласно второму варианту осуществления;
Фиг. 9 является блок-схемой, иллюстрирующей систему определения обновления карт согласно второму варианту осуществления;
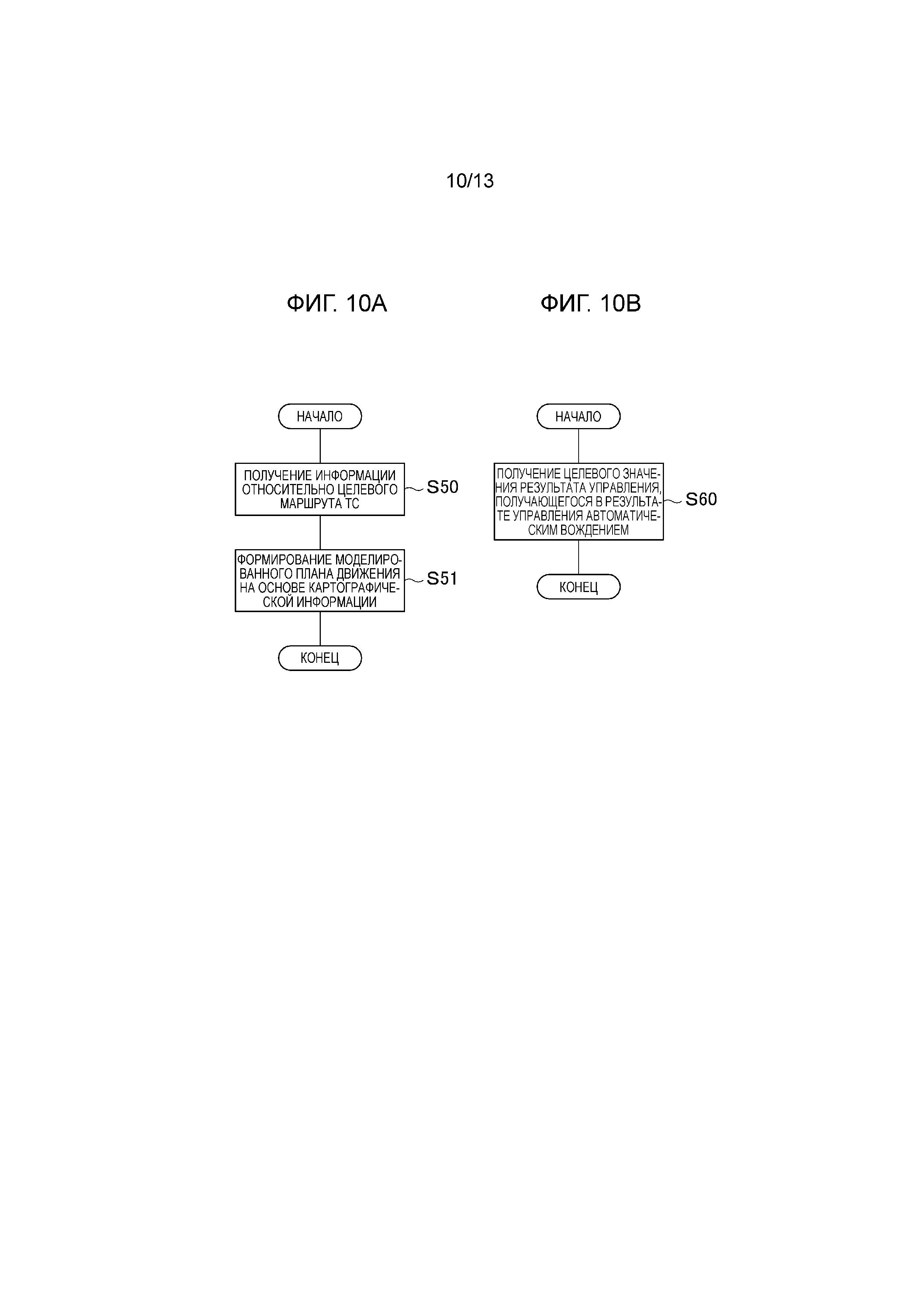
Фиг. 10A является блок-схемой последовательности операций способа, иллюстрирующей обработку формирования моделированного плана движения системы определения обновления карт согласно второму варианту осуществления;
Фиг. 10B является блок-схемой последовательности операций способа, иллюстрирующей обработку получения значений обнаружения результатов управления системы определения обновления карт согласно второму варианту осуществления;
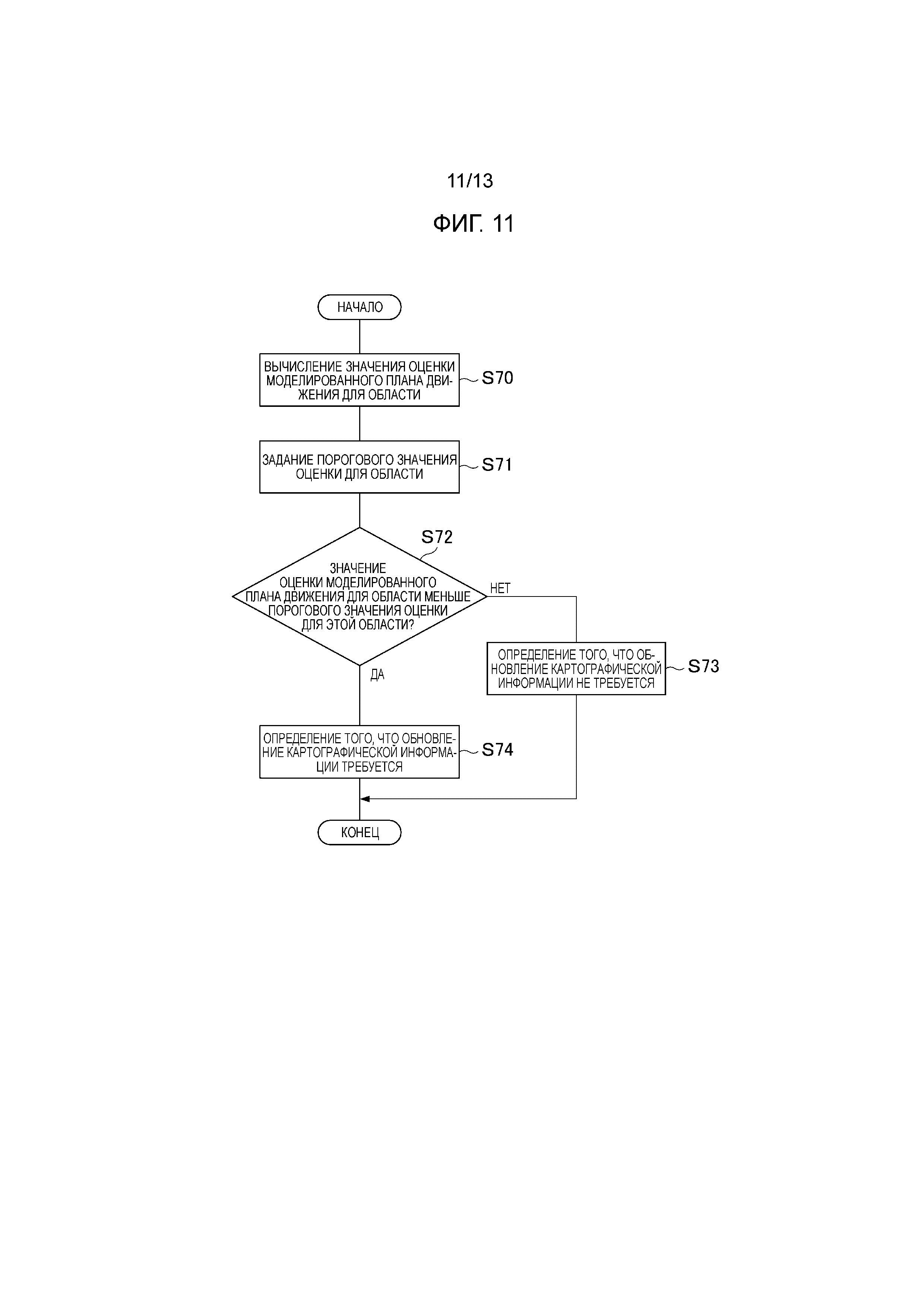
Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей обработку определения обновления карт системы определения обновления карт согласно второму варианту осуществления;
Фиг. 12A является видом сверху, иллюстрирующим дорогу до дорожных работ, которые вызывают изменение направления движения по полосе движения;
Фиг. 12B является видом сверху, иллюстрирующим дорогу после дорожных работ, которые вызывают изменение направления движения по полосе движения;
Фиг. 13A является видом сверху, иллюстрирующим дорогу до изменения нормативной информации по регулированию скорости; и
Фиг. 13B является видом сверху, иллюстрирующим дорогу после изменения нормативной информации по регулированию скорости.
Подробное описание вариантов осуществления
[0012] Далее подробно описываются предпочтительные варианты осуществления изобретения со ссылками на прилагаемые чертежи. В нижеприведенном описании, идентичные ссылки с номерами используются для того, чтобы означать идентичные компоненты или компоненты, которые имеют идентичные функции, так что идентичное описание не повторяется.
[0013] Первый вариант осуществления
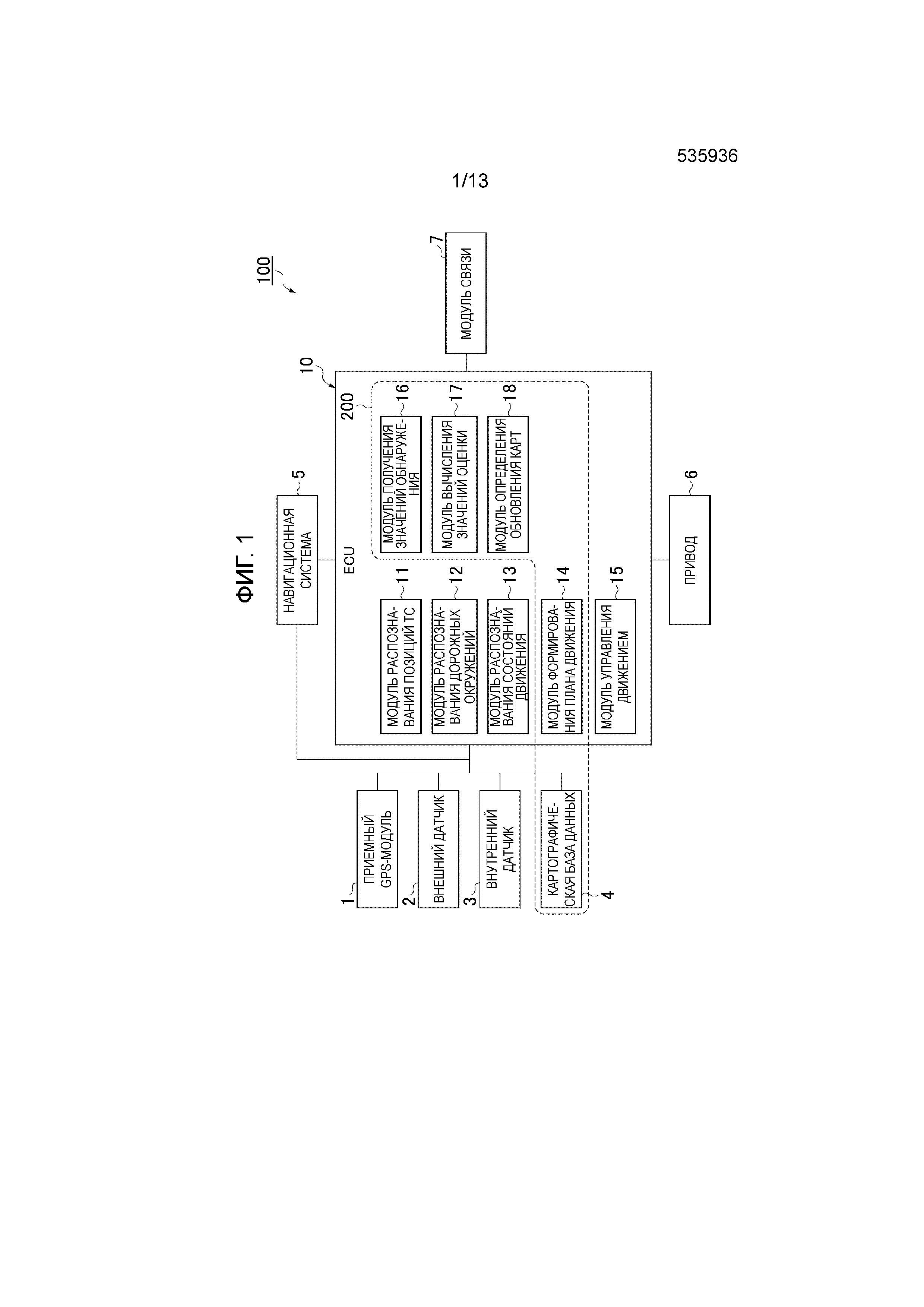
Фиг. 1 является блок-схемой, иллюстрирующей систему 100 автоматического вождения, которая включает в себя систему 200 определения обновления карт согласно первому варианту осуществления. Сначала описывается общее представление системы 100 автоматического вождения, а затем описывается общее представление системы 200 определения обновления карт. Далее описывается конфигурация системы 100 автоматического вождения, которая включает в себя систему 200 определения обновления карт, после чего выполняется описание различных типов обработки в системе 100 автоматического вождения.
[0014] Система 100 автоматического вождения представляет собой систему, которая устанавливается в транспортном средстве, таком как легковой автомобиль, чтобы выполнять управление автоматическим вождением для транспортного средства. В случае, если операция инициирования управления автоматическим вождением выполняется водителем (посредством, например, нажатия кнопки инициирования управления автоматическим вождением водителем), система 100 автоматического вождения инициирует управление автоматическим вождением для транспортного средства.
[0015] Управление автоматическим вождением представляет собой управление транспортным средством, которое обеспечивает автоматическое движение транспортного средства по целевому маршруту, заданному заранее. В ходе управления автоматическим вождением, транспортное средство движется автоматически, и водитель не должен выполнять операцию вождения. Целевой маршрут представляет собой маршрут на карте, по которому движется транспортное средство в ходе управления автоматическим вождением. Ниже подробно описывается задание целевого маршрута.
[0016] Система 100 автоматического вождения использует картографическую информацию для того, чтобы выполнять управление автоматическим вождением. Картографическая информация включает в себя информацию позиции дороги (информацию позиции посредством полосы движения), информацию формы дороги (изгибы, типы линейных частей, кривизны изгибов и т.п.), информацию ширины дороги (информацию ширины полосы движения) и информацию предела скорости транспортного средства относительно дорог. Картографическая информация также включает в себя информацию позиции относительно точек пересечения и скрещений дорог, информацию позиции относительно линий временной остановки, информацию позиций пешеходных переходов и информацию позиций светофоров. Картографическая информация также может включать в себя информацию градиента дороги и информацию наклона дороги.
[0017] Помимо этого, картографическая информация может включать в себя информацию относительно позиций и формы неподвижных препятствий, таких как бордюры, телефонные столбы, опоры, дорожные ограждения, стены и здания. Картографическая информация может включать в себя информацию относительно позиций и форм рисунков на поверхности дороги, таких как символы и метки, нанесенные на поверхности дороги. Рисунок на поверхности дороги может включать в себя канализационный люк. Картографическая информация также может включать в себя информацию относительно вывесок, расположенных поверх дорог, и информацию относительно знаков, расположенных на обочинах.
[0018] Система 100 автоматического вождения формирует план движения, который используется для управления автоматическим вождением на основе целевого маршрута и картографической информации. План движения представляет собой план для транспортного средства, движущегося по целевому маршруту из текущей позиции транспортного средства до пункта назначения на десятки километров впереди текущей позиции транспортного средства. Этот план движения формируется в зависимости от картографической информации.
[0019] Целевое значение управления для транспортного средства, которое зависит от позиции транспортного средства на целевом маршруте, включено в план движения. Позиция на целевом маршруте представляет собой позицию на карте в направлении, в котором проходит целевой маршрут. Позиции на целевом маршруте означают заданные продольные позиции, которые задаются с предварительно определенными интервалами (к примеру, 1 м) в направлении, в котором проходит целевой маршрут.
[0020] Целевое значение управления является целевым значением управления транспортным средством в плане движения. Целевое значение управления задается в ассоциации с каждой из заданных продольных позиций на целевом маршруте. Целевое значение управления включает в себя целевую поперечную позицию транспортного средства и целевую скорость транспортного средства для транспортного средства.
[0021] Целевая поперечная позиция представляет собой целевую поперечную позицию управления транспортного средства в плане движения. Поперечная позиция транспортного средства представляет собой позицию транспортного средства в направлении ширины дороги (в направлении ширины полосы движения) для дороги, по которой движется транспортное средство. Направление ширины полосы движения представляет собой направление, ортогональное, на поверхности дороги для дороги, к линии дорожной разметки, которая формирует полосу движения дороги. Помимо этого, позиция транспортного средства в направлении прохождения дороги (в направлении, ортогональном к направлению ширины дороги) упоминается в качестве продольной позиции транспортного средства. Продольная позиция транспортного средства представляет собой позицию транспортного средства в направлении, в котором проходит целевой маршрут. Целевая скорость транспортного средства представляет собой целевую скорость транспортного средства управления транспортного средства в плане движения.
[0022] Система 100 автоматического вождения распознает дорожное окружение около транспортного средства на основе изображения, захваченного посредством бортовой камеры, результата обнаружения посредством бортового лидара, результата обнаружения посредством бортового радара и т.п. Дорожное окружение включает в себя позиции линий дорожной разметки, которые формируют полосу движения, по которой движется транспортное средство, типы линий для линий дорожной разметки, формы дорог (включающие в себя кривизны дороги), ширины полосы движения и позицию неподвижных препятствий. Неподвижные препятствия представляют собой здания, стены, дорожные ограждения, телефонные столбы и т.п. Дорожное окружение может включать в себя наклоны полос движения и градиенты полос движения.
[0023] Система 100 автоматического вождения также распознает состояние движения транспортного средства на основе результатов обнаружения посредством датчика скорости транспортного средства для транспортного средства и т.п. Состояние движения включает в себя скорость транспортного средства для транспортного средства, ускорение транспортного средства и скорость поворота относительно вертикальной оси транспортного средства. Помимо этого, система 100 автоматического вождения измеряет позицию транспортного средства на основе результата измерения посредством приемного модуля на основе глобальной системы позиционирования (GPS) (описан ниже). Система 100 автоматического вождения может измерять позицию транспортного средства посредством использования информации позиции неподвижного препятствия, включенного в картографическую информацию, результатов обнаружения посредством бортового радара и т.п. и технологии одновременной локализации и построения карты (SLAM).
[0024] Система 100 автоматического вождения выполняет управление автоматическим вождением на основе дорожного окружения около транспортного средства, состояния движения транспортного средства, позиции транспортного средства и плана движения. Система 100 автоматического вождения выполняет управление автоматическим вождением для транспортного средства в соответствии с планом движения в случае, если картографическая информация не содержит ошибки и соответствует фактическому дорожному окружению. Управление автоматическим вождением для транспортного средства в соответствии с планом движения представляет собой управление автоматическим вождением для управления транспортным средством таким образом, что фактическая поперечная позиция транспортного средства и фактическая скорость транспортного средства для транспортного средства в заданной продольной позиции целевого маршрута соответствуют целевой поперечной позиции и целевой скорости транспортного средства в этой заданной продольной позиции.
[0025] В случае, если картографическая информация содержит ошибку, и картографическая информация является несогласованной с фактическим дорожным окружением, система 100 автоматического вождения выполняет управление автоматическим вождением в ответ на фактическое дорожное окружение. В частности, система 100 автоматического вождения выполняет управление автоматическим вождением для временной остановки транспортного средства, причем приоритет отдается фактическому дорожному окружению по сравнению с планом движения, когда линия временной остановки впереди обнаруживается в изображении, захваченном посредством бортовой камеры в случае, если план движения сформирован таким образом, что транспортное средство движется с постоянной скоростью.
[0026] В случае, если план движения сформирован таким образом, что транспортное средство движется на определенное расстояние с постоянной скоростью, система 100 автоматического вождения выполняет управление автоматическим вождением для обеспечения принудительного движения и следования транспортного средства за едущим впереди автомобилем, движущимся с более низкой скоростью, чем постоянная скорость впереди транспортного средства, причем приоритет отдается фактическому дорожному окружению по сравнению с планом движения, когда едущий впереди автомобиль присутствует впереди транспортного средства.
[0027] В дальнейшем в этом документе, описывается общее представление системы 200 определения обновления карт согласно первому варианту осуществления. Система 200 определения обновления карт представляет собой систему, которая определяет то, должна обновляться или нет картографическая информация картографической базы данных, расположенной в транспортном средстве (картографическая информация, которая используется для управления автоматическим вождением для транспортного средства). Как проиллюстрировано на фиг. 1, система 200 определения обновления карт согласно первому варианту осуществления является частью системы 100 автоматического вождения. Конкретная конфигурация системы 200 определения обновления карт описывается ниже. Транспортное средство, в котором устанавливается система 100 автоматического вождения, также может представлять собой тестовый автомобиль, который содержит различные датчики для обновления картографической информации. Другими словами, система 100 автоматического вождения согласно этому варианту осуществления может устанавливаться в тестовом автомобиле.
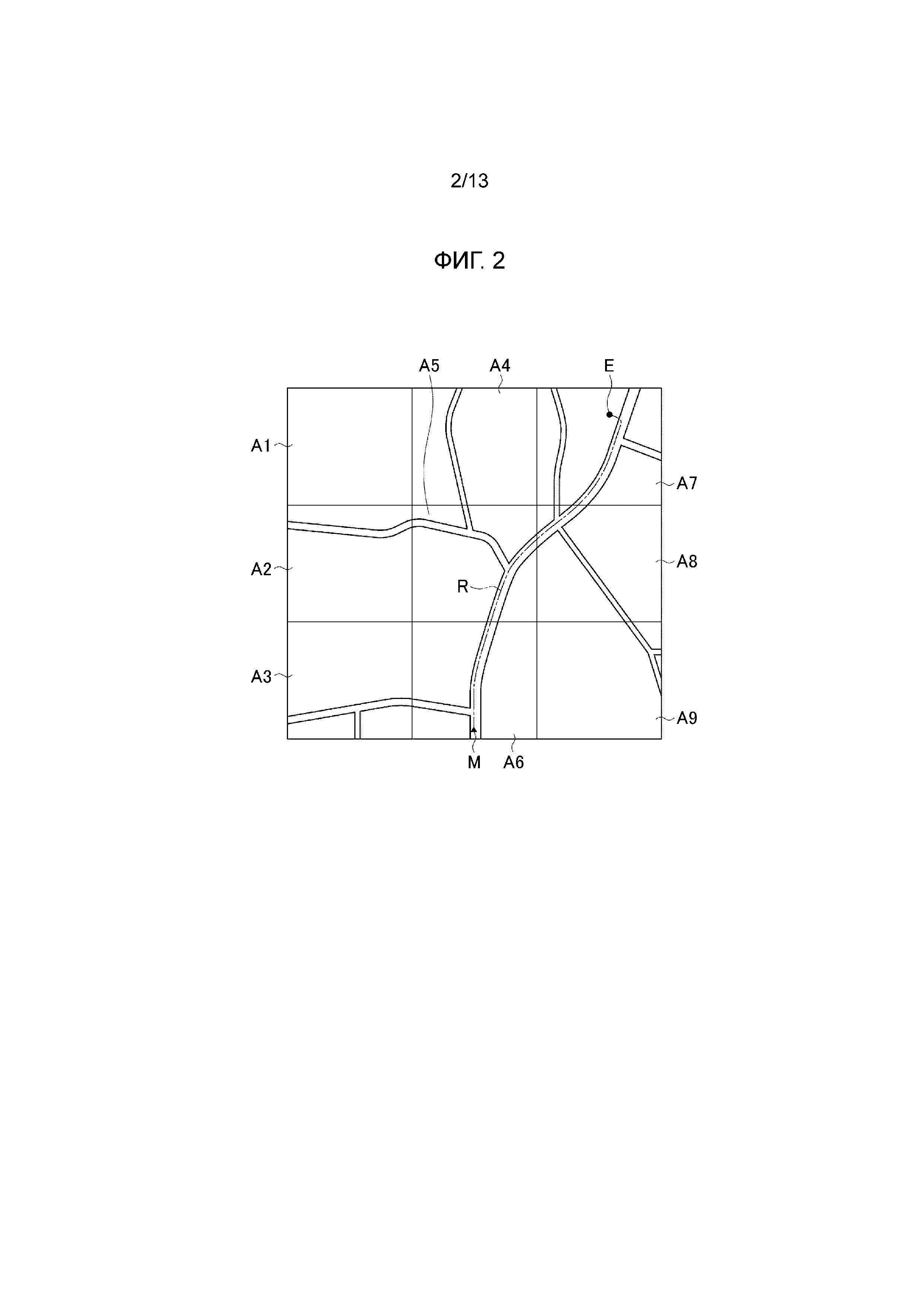
[0028] Система 200 определения обновления карт определяет необходимость обновления картографической информации в области, заданной заранее. Область задается в соответствии с форматом хранения (форматом резервирования) картографической информации в картографической базе данных. Фиг. 2 является схемой для показа примера области в качестве объекта определения обновления картографической информации. Области A1-A9, транспортное средство M, целевой маршрут R транспортного средства M и пункт E назначения целевого маршрута R проиллюстрированы на фиг. 2. В случае формата хранения, в котором картографическая информация сохраняется в картографической базе данных, причем картографическая информация разделяется в форме тайлов (квадратных тайлов, прямоугольных тайлов и т.п.), как проиллюстрировано на фиг. 2, области A1-A9, которые имеют форму разделенных тайлов, представляют собой объекты определения необходимости обновления картографической информации. В этом случае, система 200 определения обновления карт выполняет определение необходимости обновления картографической информации для каждой из областей A1-A9 в форме тайлов. Помимо этого, система 200 определения обновления карт выполняет обновление картографической информации для каждой из областей A1-A9 в форме тайлов. Система 200 определения обновления карт также может определять необходимость обновления картографической информации в любой одной из областей A1-A9 в форме тайлов.
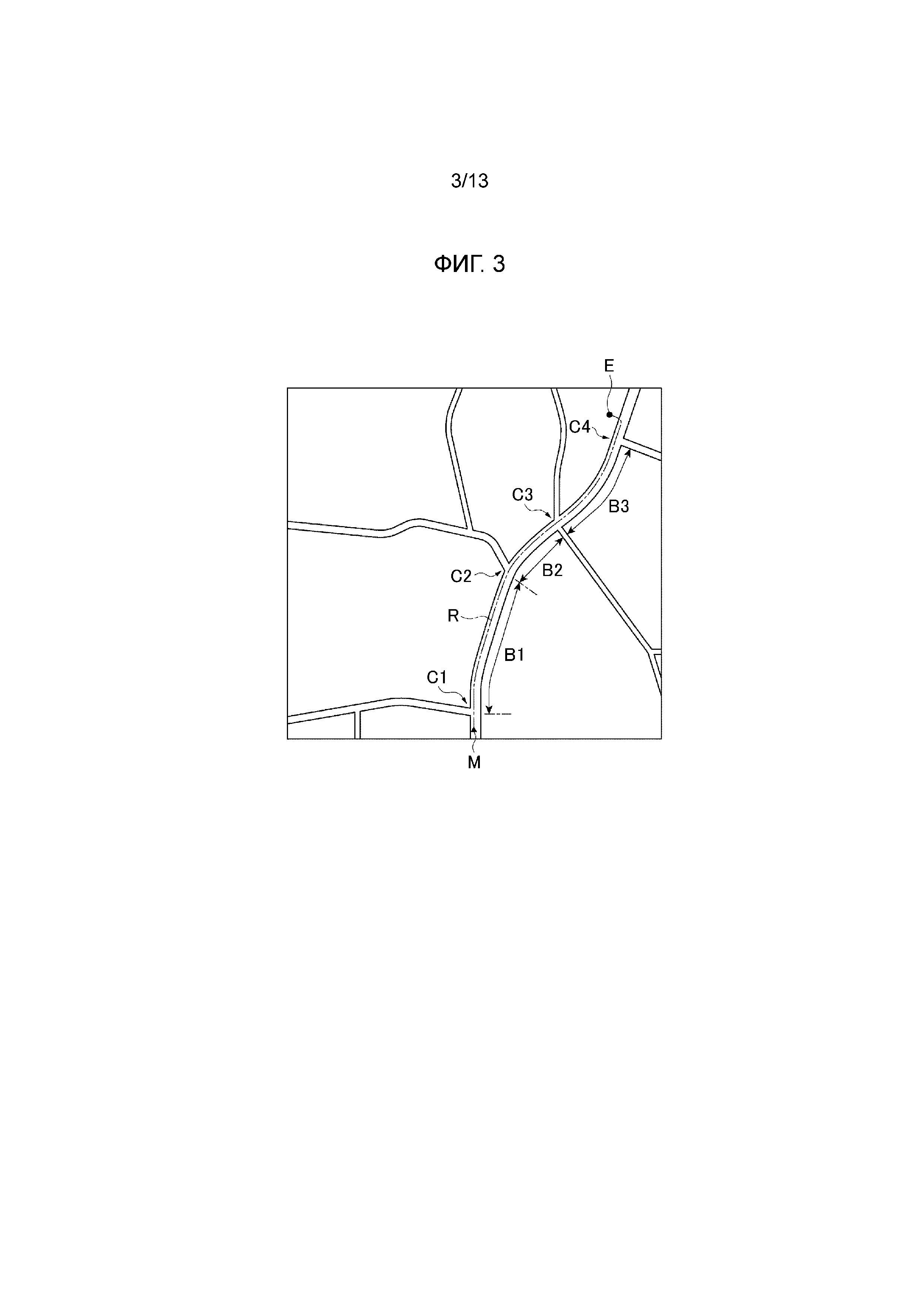
[0029] Фиг. 3 является схемой для показа другого примера области в качестве объекта определения обновления картографической информации. Области B1-B3 и точки C1-C4 пересечения проиллюстрированы на фиг. 3. В случае формата хранения, в котором дорога, включенная в картографическую информацию картографической базы данных, сохраняется в картографической базе данных, причем дорога разделяется на основе точек пересечения, как проиллюстрировано на фиг. 3, области B1-B3, которые представляют собой участки дороги, разделенной на основе точек C1-C4 пересечения, представляют собой объекты определения необходимости обновления картографической информации. В этом случае, система 200 определения обновления карт выполняет определение необходимости обновления картографической информации для каждой из областей B1-B3. Помимо этого, система 200 определения обновления карт выполняет обновление картографической информации для каждой из областей B1-B3. Обновление картографической информации по области включает в себя не только случай, в котором обновляется картографическая информация всей области, но также и случай, в котором обновляется только информация позиции такой части, как телефонный столб. Система 200 определения обновления карт также может определять необходимость обновления картографической информации в любой одной из областей B1-B3 в форме тайлов.
[0030] Картографическая база данных может иметь картографическую информацию, сохраненную в картографической базе данных в качестве иерархической структуры, которая состоит из множества слоев. В этом случае, картографическая информация сохраняется так, что картографическая информация разделяется, например, на слой телефонных столбов, который содержит информацию позиций телефонных столбов, слой бордюров, который содержит информацию позиции относительно бордюра на дороге, и слой линий дорожной разметки, который содержит информацию позиции относительно линии дорожной разметки на дороге. Посредством приспособления этой иерархической структуры, система 200 определения обновления карт должна выполнять поиск только в слое телефонных столбов при поиске информации позиций телефонных столбов, и ввиду этого может достигаться повышение эффективности поиска. Помимо этого, приспособление этой иерархической структуры обеспечивает обновление информации посредством слоя, и ввиду этого затраты на связь, требуемые для обновления и т.п., могут уменьшаться в той мере, в какой может идентифицироваться слой, требующий обновления. Картографическая база данных также может иметь информацию позиции относительно телефонного столба, бордюра и линии дорожной разметки, сохраненную в картографической базе данных, в качестве картографической информации, формирующей группу данных. Помимо этого, картографическая база данных может выполнять хранение на основе файла определений маршрутов и навигационной информации (RNDF).
[0031] В случае, если управление автоматическим вождением для транспортного средства M по целевому маршруту R выполнено, система 200 определения обновления карт получает значение обнаружения результатов управления относительно транспортного средства M, получающееся в результате управления автоматическим вождением. Система 200 определения обновления карт получает значение обнаружения результатов управления в ассоциации с заданной продольной позицией на целевом маршруте R. Значение обнаружения результатов управления является значением обнаружения, связанным с результатом управления транспортным средством M на основе управления автоматическим вождением. Значение обнаружения результатов управления получается в ассоциации с каждой из заданных продольных позиций на целевом маршруте R.
[0032] Значение обнаружения результатов управления включает в себя поперечную позицию результата управления транспортного средства и скорость транспортного средства результата управления транспортного средства. Поперечная позиция результата управления представляет собой поперечную позицию транспортного средства как результат управления для управления автоматическим вождением. Поперечная позиция результата управления представляет собой поперечную позицию транспортного средства в ходе управления автоматическим вождением, которая обнаруживается в заданной продольной позиции. Ниже подробно описывается обнаружение поперечной позиции транспортного средства. Скорость транспортного средства результата управления представляет собой скорость транспортного средства для транспортного средства как результат управления для управления автоматическим вождением. Скорость транспортного средства результата управления представляет собой скорость транспортного средства для транспортного средства в ходе управления автоматическим вождением, которая обнаруживается в заданной продольной позиции. Скорость транспортного средства результата управления обнаруживается посредством бортового датчика скорости транспортного средства.
[0033] Система 200 определения обновления карт вычисляет значение оценки плана движения на основе результата сравнения между целевым значением управления плана движения и значением обнаружения результатов управления, получающимся в результате управления автоматическим вождением. Система 200 определения обновления карт сравнивает целевое значение управления плана движения и значение обнаружения результатов управления, получающееся в результате управления автоматическим вождением, между собой для каждой из заданных продольных позиций на целевом маршруте R. Значение оценки плана движения вычисляется как значение, большее, когда целевое значение управления плана движения и значение обнаружения результатов управления, получающееся в результате управления автоматическим вождением, соответствуют друг другу.
[0034] Ниже описывается вычисление значения оценки плана движения со ссылкой на фиг. 4. Фиг. 4 является видом сверху для показа ситуации, в которой существует разность между целевой поперечной позицией плана движения и поперечной позицией результата управления, получающейся в результате управления автоматическим вождением. Область B4, которая представляет собой объект определения обновления картографической информации, полоса L движения транспортного средства M, фактическая линия Wa дорожной разметки и фактическая линия Wb дорожной разметки полосы L движения и предыдущая линия WTa дорожной разметки проиллюстрированы на фиг. 4. Область B4 представляет собой область, которая сохраняется в картографической базе данных в аналогичном формате хранения с областями B1-B3, проиллюстрированными на фиг. 3. Также проиллюстрированы на фиг. 4 заданные продольные позиции G1 в G4, целевые поперечные позиции Tw1-Tw4 плана движения, поперечные позиции Pw1-Pw4 результата управления и разности d2-d4 между целевыми поперечными позициями Tw2-Tw4 и поперечными позициями Pw2-Pw4 результата управления. Заданные продольные позиции G1-G4 задаются на целевом маршруте R в этом порядке и с предварительно определенными интервалами.
[0035] Целевая поперечная позиция Tw1, проиллюстрированная на фиг. 4, представляет собой целевую поперечную позицию, которая соответствует заданной (установленной) продольной позиции G1. Целевая поперечная позиция Tw2 представляет собой целевую поперечную позицию, которая соответствует заданной продольной позиции G2. Целевая поперечная позиция Tw3 представляет собой целевую поперечную позицию, которая соответствует заданной продольной позиции G3. Целевая поперечная позиция Tw4 представляет собой целевую поперечную позицию, которая соответствует заданной продольной позиции G4. Аналогично, поперечная позиция Pw1 результата управления представляет собой поперечную позицию результата управления, которая соответствует заданной продольной позиции G1. Поперечная позиция Pw2 результата управления представляет собой поперечную позицию результата управления, которая соответствует заданной продольной позиции G2. Поперечная позиция Pw3 результата управления представляет собой поперечную позицию результата управления, которая соответствует заданной продольной позиции G3. Поперечная позиция Pw4 результата управления представляет собой поперечную позицию результата управления, которая соответствует заданной продольной позиции G4.
[0036] Разность d2, проиллюстрированная на фиг. 4, представляет собой расстояние между целевой поперечной позицией Tw2 и поперечной позицией Pw2 результата управления в направлении ширины полосы движения. Разность d3 представляет собой расстояние между целевой поперечной позицией Tw3 и поперечной позицией Pw3 результата управления в направлении ширины полосы движения. Разность d4 представляет собой расстояние между целевой поперечной позицией Tw4 и поперечной позицией Pw4 результата управления в направлении ширины полосы движения. Целевая поперечная позиция Tw1 плана движения и поперечная позиция Pw1 результата управления являются одной и той же позицией и ввиду этого имеют разность 0. Заданные продольные позиции G1-G4 являются единственными заданными продольными позициями, которые включены в область B4.
[0037] На фиг. 4 ширина полосы движения полосы L движения расширена, и линия WTa дорожной разметки изменена на линию Wa дорожной разметки вследствие дорожных работ. Линия WTa дорожной разметки до дорожных работ представляет собой линейную линию дорожной разметки, которая идет параллельно с линией Wb дорожной разметки. Линия Wa дорожной разметки после изменения соответствует линии WTa дорожной разметки вплоть до заданной продольной позиции G1, но становится линией дорожной разметки, идущей в наклонном направлении, так чтобы становиться все более отделенной от линии Wb дорожной разметки по мере того, как линия Wa дорожной разметки перемещается из заданной продольной позиции G1 и заданной продольной позиции G2. Линия Wa дорожной разметки перед заданной продольной позицией G2 представляет собой линейную линию дорожной разметки, которая идет параллельно с линией Wb дорожной разметки. В картографической базе данных картографическая информация по-прежнему должна обновляться, и комбинация линии WTa дорожной разметки и линии Wb дорожной разметки до дорожных работ по-прежнему сохраняется в качестве линий дорожной разметки, формирующих полосу L движения.
[0038] Система 100 автоматического вождения формирует план движения таким образом, что выполняется движение в центральных позициях полосы L движения в картографической информации. Соответственно, целевые поперечные позиции Tw1-Tw4 плана движения на фиг. 4 задаются равными позициям на том же расстоянии от линии WTa дорожной разметки и линии Wb дорожной разметки в направлении ширины полосы движения.
[0039] Система 100 автоматического вождения выполняет управление автоматическим вождением на основе фактического дорожного окружения, распознанного в изображении, захваченном посредством бортовой камеры и т.п., таким образом, что транспортное средство M движется в фактических центральных позициях полосы L движения. Соответственно, поперечные позиции Pw1-Pw4 результата управления, получающиеся в результате управления автоматическим вождением, обнаруживаются в качестве позиций на том же расстоянии от линии Wa дорожной разметки и линии Wb дорожной разметки в направлении ширины полосы движения.
[0040] В ситуации, которая проиллюстрирована на фиг. 4, система 200 определения обновления карт вычисляет значение оценки плана движения для области B4 на основе результата сравнения между целевыми поперечными позициями Tw1-Tw4 плана движения, сформированного в зависимости от картографической информации, и поперечными позициями Pw1-Pw4 результата управления, получающимися в результате управления автоматическим вождением, выполняемого на основе фактического дорожного окружения. Система 200 определения обновления карт использует разности d2-d4 в качестве результатов сравнения между целевыми поперечными позициями Tw1-Tw4 и поперечными позициями Pw1-Pw4 результата управления.
[0041] Система 200 определения обновления карт вычисляет значение оценки плана движения для области B4 в качестве значения, которое снижается по мере того, как возрастает среднее значение разностей d2-d4 между целевыми поперечными позициями Tw1-Tw4 и поперечными позициями Pw1-Pw4 результата управления. Система 200 определения обновления карт также может вычислять обратное число относительно среднего значения разностей d2-d4 в качестве значения оценки плана движения для области B4.
[0042] Система 200 определения обновления карт также может использовать среднее значение, общую сумму, максимальное значение или минимальное значение разностей d2-d4 вместо среднего значения разностей d2-d4. Помимо этого, система 200 определения обновления карт может вычислять значение оценки плана движения посредством использования предварительно определенного арифметического выражения, в котором разности d2-d4 являются вводами. Система 200 определения обновления карт вычисляет значение оценки плана движения для области, как описано выше.
[0043] Система 200 определения обновления карт определяет необходимость обновления картографической информации в области на основе вычисленного значения оценки плана движения и порогового значения оценки. Пороговое значение оценки является значением, которое задается заранее. В случае, если значение оценки плана движения для области меньше порогового значения оценки, система 200 определения обновления карт определяет то, что картографическая информация относительно области должна обновляться.
[0044] В случае, если определяется то, что картографическая информация должна обновляться, система 200 определения обновления карт передает информацию, связанную с областью, подвергнутой определению, так что картографическая информация должна обновляться посредством связи с сервером в центре управления картографической информацией. Центр управления картографической информацией представляет собой инфраструктурный объект для управления картографической информацией нескольких транспортных средств, соединенных посредством связи. В центре управления картографической информацией, выполняется получение последней картографической информации посредством использования тестового автомобиля, для области, подвергнутой определению того, что картографическая информация должна обновляться. Система 200 определения обновления карт обновляет картографическую информацию бортовой картографической базы данных посредством связи с центром управления картографической информацией и посредством использования последней картографической информации центра управления картографической информацией.
[0045] Конфигурация системы автоматического вождения (системы определения обновления карт) согласно первому варианту осуществления
Как проиллюстрировано на фиг. 1, система 100 автоматического вождения согласно первому варианту осуществления содержит ECU 10 для выполнения управления автоматическим вождением. ECU 10 представляет собой электронный модуль управления, который содержит центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), схему связи на основе контроллерной сети (CAN) и т.п. Различные функции реализованы в ECU 10 посредством загрузки программы, сохраненной в ROM, в RAM, и выполнения программы, загруженной в RAM, посредством CPU. Множество электронных модулей управления также могут составлять ECU 10. Приемный GPS-модуль 1, внешний датчик 2, внутренний датчик 3, картографическая база 4 данных, навигационная система 5, привод 6 и модуль 7 связи соединяются с ECU 10 через схему CAN-связи.
[0046] Приемный GPS-модуль 1 устанавливается в транспортном средстве M и выступает в качестве модуля измерения позиции, который измеряет позицию транспортного средства M. Приемный GPS-модуль 1 измеряет позицию транспортного средства M (к примеру, широту и долготу транспортного средства M) посредством приема сигналов из трех или более GPS-спутников. Приемный GPS-модуль 1 передает информацию относительно измеренной позиции транспортного средства M в ECU 10.
[0047] Внешний датчик 2 представляет собой измерительный прибор обнаружения для обнаружения препятствия около транспортного средства M и т.п. Внешний датчик 2 включает в себя, по меньшей мере, одно из камер, радара и лазерной системы обнаружения и измерения дальности (лидара). Внешний датчик 2 также используется для распознавания линии дорожной разметки полосы движения, в которой движется транспортное средство M (описан ниже). Помимо этого, внешний датчик 2 может использоваться для измерения позиции транспортного средства M.
[0048] Камера представляет собой прибор для обработки изображений, который формирует изображение внешней ситуации транспортного средства. Камеры располагаются на задней стороне ветрового стекла транспортного средства M и на задней поверхности транспортного средства. Камеры могут располагаться на правой и левой боковых поверхностях транспортного средства M. Камеры передают информацию обработки изображений в ECU 10, причем информация обработки изображений получается посредством формирования изображений пространств впереди и позади транспортного средства M. Камера может представлять собой монокулярную камеру или стереокамеру. Стереокамера содержит два модуля формирования изображений, которые размещены с возможностью воспроизводить бинокулярную диспаратность. Информация обработки изображений стереокамеры включает в себя информацию направления глубины.
[0049] Радар обнаруживает препятствие около транспортного средства M посредством использования радиоволн (к примеру, миллиметровых волн). Радар обнаруживает препятствие посредством передачи радиоволн в окрестность транспортного средства M и приема радиоволн, отражаемых посредством препятствия. Радар передает информацию относительно обнаруженного препятствия ECU 10. Препятствие включает в себя подвижное препятствие, такое как велосипед и другое транспортное средство, а также неподвижные препятствия, описанные выше.
[0050] Лидар обнаруживает препятствие за пределами транспортного средства M посредством использования света. Лидар обнаруживает препятствие посредством пропускания света в окрестность транспортного средства M, приема света, отражаемого посредством препятствия, и измерения расстояния до точки отражения. Лидар передает информацию относительно обнаруженного препятствия в ECU 10. Лидар и радар не обязательно должны предусматриваться совместно.
[0051] Внутренний датчик 3 представляет собой измерительный прибор обнаружения, который обнаруживает состояние движения транспортного средства M. Внутренний датчик 3 включает в себя датчик скорости транспортного средства, датчик ускорения и датчик скорости поворота относительно вертикальной оси. Датчик скорости транспортного средства представляет собой средство обнаружения, которое обнаруживает скорость транспортного средства M. Датчик скорости вращения колес транспортного средства используется в качестве датчика скорости транспортного средства. Датчик скорости вращения колес транспортного средства располагается относительно колеса транспортного средства для транспортного средства M, ведущего вала, вращающегося вместе с колесом транспортного средства и т.п., и обнаруживает скорость вращения колеса транспортного средства. Датчик скорости транспортного средства передает информацию относительно обнаруженной скорости транспортного средства в ECU 10.
[0052] Датчик ускорения представляет собой средство обнаружения, которое обнаруживает ускорение транспортного средства M. Датчик ускорения включает в себя датчик продольного ускорения, который обнаруживает продольное ускорение транспортного средства, и датчик поперечного ускорения, который обнаруживает поперечное ускорение транспортного средства M. Датчик ускорения передает информацию ускорения относительно транспортного средства M в ECU 10. Датчик скорости поворота относительно вертикальной оси представляет собой средство обнаружения, которое обнаруживает скорость поворота относительно вертикальной оси (угловую скорость вращения) вокруг вертикальной оси центра тяжести транспортного средства M. Гиродатчик может использоваться в качестве датчика скорости поворота относительно вертикальной оси. Датчик скорости поворота относительно вертикальной оси передает информацию относительно обнаруженной скорости поворота относительно вертикальной оси транспортного средства M в ECU 10.
[0053] Внутренний датчик 3 может включать в себя датчик угла поворота при рулении. Датчик угла поворота при рулении представляет собой датчик, который обнаруживает угол поворота при рулении (фактический угол поворота при рулении) транспортного средства M. Датчик угла поворота при рулении располагается относительно рулевого вала транспортного средства M. Датчик угла поворота при рулении передает информацию относительно обнаруженного угла поворота при рулении в ECU 10.
[0054] Картографическая база 4 данных представляет собой базу данных хранения картографической информации. Картографическая база 4 данных формируется на жестком диске (HDD), который устанавливается в транспортном средстве M. Картографическая база 4 данных может соединяться с сервером в центре управления картографической информацией посредством беспроводной связи через модуль 7 связи. Картографическая база 4 данных обновляет картографическую информацию на регулярной основе посредством использования последней картографической информации, сохраненной на сервере в центре управления картографической информацией. Картографическая база 4 данных содержит картографическую информацию, сохраненную для каждой из областей, описанных выше.
[0055] Картографическая база 4 данных составляет систему 200 определения обновления карт с модулем 14 формирования плана движения, модулем 16 получения значений обнаружения, модулем 17 вычисления значений оценки и модулем 18 определения обновления карт (описаны ниже). Картографическая база 4 данных не обязательно должна устанавливаться в транспортном средстве M. Картографическая база 4 данных может располагаться, например, на сервере, который способен к обмену данными с транспортным средством M.
[0056] Навигационная система 5 устанавливается в транспортном средстве M и задает целевой маршрут R, по которому движется транспортное средство M, как результат управления автоматическим вождением. Навигационная система 5 вычисляет целевой маршрут R из позиции транспортного средства M до пункта E назначения на основе пункта E назначения, заданного заранее, позиции транспортного средства M, измеряемой посредством приемного GPS-модуля 1, и картографической информации картографической базы 4 данных. Пункт E назначения управления автоматическим вождением задается посредством нажатия кнопки ввода (или сенсорной панели), которую содержит навигационная система 5, пассажиром в транспортном средстве M. Целевой маршрут R задается с разделением по полосам движения, составляющим дорогу. Навигационная система 5 может задавать целевой маршрут R посредством использования известной технологии. Навигационная система 5 может иметь функцию для того, чтобы выдавать инструкции по целевому маршруту R во время вождения вручную транспортного средства M водителем. Навигационная система 5 выводит информацию относительно целевого маршрута R транспортного средства M в ECU 10. Некоторые функции навигационной системы 5 могут выполняться посредством сервера в таком инфраструктурном объекте, как центр обработки информации, который способен к обмену данными с транспортным средством M. Функции навигационной системы 5 также могут выполняться в ECU 10.
[0057] В данном документе, целевой маршрут R включает в себя целевой маршрут, который автоматически формируется на основе предыстории предыдущих пунктов назначения и картографической информации, когда явное задание пунктов назначения не выполнено водителем, примеры чего включают в себя маршрут движения по дороге согласно "DRIVING SUPPORT DEVICE" (устройство помощи при вождении), раскрытому в патенте (Япония) № 5382218 (WO2011/158347), или "AUTOMATIC DRIVING DEVICE" (устройство автоматического вождения), раскрытому в публикации заявки на патент (Япония) номер 2011-162132 (JP 2011-162132 А).
[0058] Привод 6 представляет собой устройство, которое выполняет управление движением для транспортного средства M. Привод 6 включает в себя, по меньшей мере, привод дросселя, тормозной привод и привод рулевого управления. Привод дросселя управляет объемом подачи воздуха в двигатель (степенью открытия дросселя) в ответ на управляющий сигнал из ECU 10, чтобы управлять движущей силой транспортного средства M. В случае, если транспортное средство M представляет собой гибридный автомобиль, движущая сила управляется с помощью ввода управляющего сигнала из ECU 10 в электромотор в качестве источника питания в дополнение к объему подачи воздуха в двигатель. В случае, если транспортное средство M представляет собой электромобиль, движущая сила управляется с помощью ввода управляющего сигнала из ECU 10 в электромотор в качестве источника питания. Электромоторы в качестве источников питания в этих случаях составляют привод 6.
[0059] Тормозной привод управляет тормозной системой в ответ на управляющий сигнал из ECU 10, чтобы управлять тормозной силой, которая передается колесу транспортного средства для транспортного средства M. Гидравлическая тормозная система может использоваться в качестве тормозной системы. Привод рулевого управления управляет, в ответ на управляющий сигнал из ECU 10, приведением в действие вспомогательного электромотора для управления крутящим моментом поворота при рулении системы рулевого управления с электроусилителем руля. Таким образом, привод рулевого управления управляет крутящим моментом поворота при рулении транспортного средства M.
[0060] Модуль 7 связи устанавливается в транспортном средстве M и осуществляет беспроводную связь. Модуль 7 связи осуществляет беспроводную связь с сервером в центре управления картографической информацией и т.п., который управляет картографической информацией. Модуль 7 связи также может выполнять связь между транспортными средствами с другим транспортным средством, которое способно к связи между транспортными средствами. Помимо этого, модуль 7 связи может выполнять связь между транспортным средством и дорожной инфраструктурой с придорожным приемо-передающим устройством, которое располагается по дороге.
[0061] В дальнейшем в этом документе, описывается функциональная конфигурация ECU 10. ECU 10 содержит модуль 11 распознавания позиций транспортного средства, модуль 12 распознавания дорожных окружений, модуль 13 распознавания состояний движения, модуль 14 формирования плана движения, модуль 15 управления движением, модуль 16 получения значений обнаружения, модуль 17 вычисления значений оценки и модуль 18 определения обновления карт. Некоторые функции ECU 10 могут выполняться посредством сервера, который способен к обмену данными с транспортным средством M.
[0062] Модуль 11 распознавания позиций транспортного средства распознает позицию транспортного средства M на карте на основе информации позиции приемного GPS-модуля 1 и картографической информации картографической базы 4 данных. Модуль 11 распознавания позиций транспортного средства распознает позицию транспортного средства M в качестве комбинации координаты X и координаты Y в ортогональной системе координат XY, в которой позиция транспортного средства M во время инициирования управления автоматическим вождением представляет собой точку отсчета. Модуль 11 распознавания позиций транспортного средства также может распознавать позицию транспортного средства M посредством использования информации позиции относительно неподвижного препятствия, такого как телефонный столб, включенной в картографическую информацию картографической базы 4 данных, результата обнаружения посредством внешнего датчика 2 и SLAM-технологии. В этом случае, внешний датчик 2 выступает в качестве модуля измерения позиции вместо приемного GPS-модуля 1.
[0063] Центральная позиция транспортного средства M в случае, если транспортное средство M наблюдается в вертикальном направлении (в случае вида сверху), может представлять собой точку отсчета для позиции транспортного средства M. Центральная позиция транспортного средства M представляет собой позицию в центре транспортного средства M в направлении ширины транспортного средства и в центре транспортного средства M в продольном направлении.
[0064] Модуль 11 распознавания позиций транспортного средства также распознает продольную позицию транспортного средства M и поперечную позицию транспортного средства. В случае, если картографическая информация включает в себя информацию позиции линии дорожной разметки, модуль 11 распознавания позиций транспортного средства распознает продольную позицию транспортного средства M и поперечную позицию транспортного средства M посредством использования позиции транспортного средства M в ортогональной системе координат XY и информации позиции относительно линии дорожной разметки полосы движения, в которой движется транспортное средство M (информации координат). Модуль 11 распознавания позиций транспортного средства вычисляет, посредством использования известной технологии обработки вычислений, продольную позицию транспортного средства в направлении, в котором проходит полоса движения, и поперечную позицию транспортного средства M в направлении ширины полосы движения.
[0065] Модуль 11 распознавания позиций транспортного средства может распознавать поперечную позицию транспортного средства M посредством использования известной технологии обработки изображений и на основе изображения пространства впереди транспортного средства (изображения линии дорожной разметки), захваченного посредством бортовой камеры. Бортовая камера содержит предварительно определенную монтажную позицию в транспортном средстве M, и диапазон формирования изображений камеры из этой монтажной позиции также определяется заранее. Также заранее определяется позиционная взаимосвязь (позиционная взаимосвязь при виде сверху) между монтажной позицией камеры и центральной позицией транспортного средства M. Соответственно, модуль 11 распознавания позиций транспортного средства способен к получению центральной позиции транспортного средства M (поперечной позиции транспортного средства M) в направлении ширины полосы движения из позиций двух, правой и левой, линий дорожной разметки на изображении, захваченном посредством камеры. Помимо этого, модуль 11 распознавания позиций транспортного средства может распознавать поперечную позицию транспортного средства M в качестве величины отклонения (величины отклонения) центральной позиции транспортного средства M относительно центра полосы движения (позиции на том же расстоянии от двух, правой и левой, линий дорожной разметки).
[0066] Модуль 11 распознавания позиций транспортного средства также может распознавать поперечную позицию транспортного средства M посредством использования обнаружения линий дорожной разметки не посредством камера, а посредством лидара. Лидар также содержит предварительно определенную монтажную позицию в транспортном средстве M, и диапазон обнаружения лидара из этой монтажной позиции также определяется заранее. Также заранее определяется позиционная взаимосвязь (позиционная взаимосвязь при виде сверху) между монтажной позицией лидара и центральной позицией транспортного средства M. Соответственно, модуль 11 распознавания позиций транспортного средства способен к получению поперечной позиции транспортного средства M из позиций двух, правой и левой, линий дорожной разметки, обнаруженных посредством лидара.
[0067] Точка отсчета позиции транспортного средства M может представлять собой позицию центра тяжести транспортного средства M (позицию центра тяжести транспортного средства M в ходе расчетов) в случае, если транспортное средство M наблюдается в вертикальном направлении вместо центральной позиции транспортного средства M. Поскольку позиционная взаимосвязь между позицией центра тяжести транспортного средства M в ходе расчетов и центральной позицией транспортного средства M, описанная выше, предварительно определена, модуль 11 распознавания позиций транспортного средства способен к распознаванию поперечной позиции транспортного средства M относительно позиции центра тяжести транспортного средства M в качестве точки отсчета, как и в случае с центральной позицией транспортного средства M.
[0068] Модуль 12 распознавания дорожных окружений распознает дорожное окружение около транспортного средства M на основе результата обнаружения посредством внешнего датчика 2. Модуль 12 распознавания дорожных окружений распознает дорожное окружение около транспортного средства M посредством использования известной технологии и на основе изображения, захваченного посредством камеры, информации о препятствиях радара или информации о препятствиях лидара. Модуль 12 распознавания дорожных окружений распознает позицию линии дорожной разметки полосы движения, в которой движется транспортное средство M, на основе информации обработки изображений камеры или информации о препятствиях лидара. Модуль 12 распознавания дорожных окружений также может распознавать тип линии для линии дорожной разметки и кривизну линии дорожной разметки. Модуль 12 распознавания дорожных окружений распознает неподвижное препятствие вокруг транспортного средства M на основе информации обработки изображений камеры, информации о препятствиях лидара или информации о препятствиях радара.
[0069] Модуль 13 распознавания состояний движения распознает состояние движения транспортного средства M, которое включает в себя скорость транспортного средства и направление транспортного средства M, на основе результата обнаружения посредством внутреннего датчика 3. В частности, модуль 13 распознавания состояний движения распознает скорость транспортного средства для транспортного средства M на основе информации скорости транспортного средства из датчика скорости транспортного средства. Модуль 13 распознавания состояний движения распознает направление транспортного средства M на основе информации скорости поворота относительно вертикальной оси из датчика скорости поворота относительно вертикальной оси.
[0070] Модуль 14 формирования плана движения формирует план движения транспортного средства M на основе целевого маршрута R, заданного посредством навигационной системы 5, и картографической информации картографической базы 4 данных. В случае, если операция инициирования управления автоматическим вождением выполняется водителем, модуль 14 формирования плана движения инициирует формирование плана движения. Этот план движения представляет собой план движения, который продолжается до тех пор, пока транспортное средство M не достигнет пункта E назначения, заданного заранее из текущей позиции транспортного средства M. Этот план движения формируется в зависимости от картографической информации.
[0071] Модуль 14 формирования плана движения формирует план движения посредством задания заданных продольных позиций на целевом маршруте R с предварительно определенными интервалами (к примеру, 1 м) и задания целевого значения управления (к примеру, целевой поперечной позиции и целевой скорости транспортного средства) для каждой из заданных продольных позиций. Другими словами, план движения включает в себя целевые значения управления в зависимости от заданных продольных позиций на целевом маршруте R. Заданная продольная позиция и целевая поперечная позиция могут совместно задаваться в качестве одной позиционной координаты. Заданная продольная позиция и целевая поперечная позиция означают информацию продольной позиции и информацию поперечной позиции, которые задаются в качестве целей в плане движения.
[0072] Ниже подробно описывается формирование плана движения со ссылкой на фиг. 4. В случае, если операция инициирования управления автоматическим вождением выполняется водителем в случае, в котором транспортное средство M позиционируется на предварительно определенном расстоянии (в сотне метров или на несколько километров) впереди заданной продольной позиции G1, проиллюстрированной на фиг. 4, модуль 14 формирования плана движения формирует, на основе картографической информации, план движения, включающий в себя целевые значения управления в зависимости от заданных продольных позиций G1-G4. Модуль 14 формирования плана движения формирует план движения для движения в центральной позиции полосы L движения в направлении ширины полосы движения. Поскольку картографическая информация картографической базы 4 данных по-прежнему должна обновляться, модуль 14 формирования плана движения формирует план движения на основе устаревшей картографической информации (картографической информации, в которой сохраняются линия WTa дорожной разметки и линия Wb дорожной разметки до дорожных работ). Другими словами, модуль 14 формирования плана движения формирует план движения для движения транспортного средства M в целевых поперечных позициях Tw1-Tw4, которые представляют собой позиции на том же расстоянии от линии WTa дорожной разметки и линии Wb дорожной разметки.
[0073] Помимо этого, модуль 14 формирования плана движения формирует краткосрочный план движения в ответ на фактическое дорожное окружение, отличный от плана движения в зависимости от картографической информации. Краткосрочный план движения формируется в качестве плана для движения транспортного средства M в диапазоне обнаружения внешнего датчика 2 (к примеру, в диапазоне 150 м или меньше впереди транспортного средства M).
[0074] Краткосрочный план движения содержит краткосрочное целевое значение управления в зависимости от заданной продольной позиции на целевом маршруте R, как и в случае с планом движения. Краткосрочное целевое значение управления является целевым значением управления для транспортного средства M в краткосрочном плане движения. Краткосрочное целевое значение управления задается в ассоциации с каждой из заданных продольных позиций на целевом маршруте R. Краткосрочное целевое значение управления включает в себя краткосрочную целевую поперечную позицию транспортного средства M и краткосрочную целевую скорость транспортного средства для транспортного средства M. Краткосрочная целевая поперечная позиция представляет собой целевую поперечную позицию управления транспортного средства M в краткосрочном плане движения. Краткосрочная целевая скорость транспортного средства представляет собой целевую скорость транспортного средства управления транспортного средства M в краткосрочном плане движения.
[0075] Модуль 14 формирования плана движения формирует краткосрочный план движения на основе дорожного окружения около транспортного средства M, распознанного посредством модуля 12 распознавания дорожных окружений, состояния движения транспортного средства M, распознанного посредством модуля 13 распознавания состояний движения, позиции транспортного средства M, распознанной посредством модуля 11 распознавания позиций транспортного средства, и плана движения (плана движения, продолжающегося до пункта E назначения из текущей позиции транспортного средства M).
[0076] В случае, если картографическая информация содержит ошибку, модуль 14 формирования плана движения может приспосабливать целевое значение управления плана движения в качестве краткосрочного целевого значения управления краткосрочного плана движения. В случае, если транспортное средство M движется в поперечной позиции, отклоняющейся от плана движения (в поперечной позиции, отклоняющейся от центральной позиции полосы движения), модуль 14 формирования плана движения формирует краткосрочный план движения таким образом, что транспортное средство M возвращается в центральную позицию полосы движения из текущей позиции транспортного средства M. Формирование краткосрочного плана движения, описанное выше, может быть реализовано со ссылкой на публикацию заявки на патент (Япония) номер 2009-291540 (JP 2009-291540 А).
[0077] Ниже подробно описывается формирование краткосрочного плана движения со ссылкой на фиг. 4. В случае, если заданные продольные позиции G1-G4 включены в диапазон обнаружения внешнего датчика 2 при движении транспортного средства M, модуль 14 формирования плана движения формирует краткосрочный план движения, включающий в себя краткосрочные целевые значения управления в зависимости от заданных продольных позиций G1-G4. Модуль 14 формирования плана движения формирует краткосрочный план движения для движения в центральной позиции полосы L движения в направлении ширины полосы движения. Модуль 14 формирования плана движения формирует, на основе дорожного окружения около транспортного средства M, краткосрочный план движения для движения транспортного средства M в позиции на том же расстоянии от фактической линии Wa дорожной разметки и линии Wb дорожной разметки. В этом случае, краткосрочные целевые поперечные позиции краткосрочного плана движения, которые соответствуют заданным продольным позициям G1-G4, задаются равными позициям, идентичным поперечным позициям Pw1-Pw4 результата управления, соответственно.
[0078] Как проиллюстрировано на фиг. 1, модуль 14 формирования плана движения составляет систему 200 определения обновления карт вместе с картографической базой 4 данных, модулем 16 получения значений обнаружения, модулем 17 вычисления значений оценки и модулем 18 определения обновления карт.
[0079] Модуль 15 управления движением выполняет управление автоматическим вождением для транспортного средства M на основе краткосрочного плана движения, сформированного посредством модуля 14 формирования плана движения. Другими словами, модуль 15 управления движением выполняет управление автоматическим вождением на основе дорожного окружения около транспортного средства M, состояния движения транспортного средства M, позиции транспортного средства M и краткосрочного плана движения, сформированного из плана движения.
[0080] Модуль 15 управления движением вычисляет значение управления команды на основе краткосрочного плана движения таким образом, что поперечная позиция транспортного средства M и скорость транспортного средства для транспортного средства M становятся целевой поперечной позицией и целевой скоростью транспортного средства краткосрочного плана движения в заданной продольной позиции. Модуль 15 управления движением выводит вычисленное значение управления команды в привод 6. Модуль 15 управления движением выполняет управление автоматическим вождением для транспортного средства M посредством управления выводом привода 6 (таким как движущая сила, тормозная сила и крутящий момент поворота при рулении) с помощью значения управления команды. Модуль 15 управления движением выполняет управление автоматическим вождением в ответ на фактическое дорожное окружение на основе краткосрочного плана движения.
[0081] В частности, модуль 15 управления движением выполняет управление автоматическим вождением таким образом, что транспортное средство M проходит через поперечные позиции Pw1-Pw4 результата управления в полосе L движения, проиллюстрированной на фиг. 4, на основе краткосрочного плана движения.
[0082] В случае, если выполняется управление автоматическим вождением для транспортного средства M, модуль 16 получения значений обнаружения получает значение обнаружения результатов управления относительно транспортного средства M, получающееся в результате управления автоматическим вождением. Модуль 16 получения значений обнаружения получает значение обнаружения результатов управления в ассоциации с заданной продольной позицией на целевом маршруте R. Как описано выше, значение обнаружения результатов управления включает в себя скорость транспортного средства результата управления и поперечную позицию результата управления.
[0083] Модуль 16 получения значений обнаружения вычисляет скорость транспортного средства для транспортного средства M, которая ассоциирована с продольной позицией транспортного средства M, на основе продольной позиции транспортного средства M, распознанной посредством модуля 11 распознавания позиций транспортного средства, и информации скорости транспортного средства из датчика скорости транспортного средства. Модуль 16 получения значений обнаружения получает скорость транспортного средства результата управления транспортного средства M, которая ассоциирована с каждой из заданных продольных позиций, на основе скорости транспортного средства для транспортного средства M, которая ассоциирована с продольной позицией транспортного средства M. Скорость транспортного средства результата управления транспортного средства M, которая ассоциирована с заданной продольной позицией, не должна представлять собой скорость транспортного средства в то время, когда продольная позиция транспортного средства M соответствует заданной продольной позиции. Модуль 16 получения значений обнаружения может получать скорость транспортного средства в то время, когда продольная позиция транспортного средства M является ближайшей к заданной продольной позиции, в качестве скорости транспортного средства результата управления транспортного средства M, ассоциированной с этой заданной продольной позицией, из числа скоростей транспортного средства для транспортного средства M, периодически обнаруживаемых посредством датчика скорости транспортного средства.
[0084] Аналогично, модуль 16 получения значений обнаружения получает поперечную позицию результата управления транспортного средства M, которая ассоциирована с каждой из заданных продольных позиций, на основе продольной позиции транспортного средства M и поперечной позиции транспортного средства M, распознанных посредством модуля 11 распознавания позиций транспортного средства. Поперечная позиция результата управления транспортного средства M, которая ассоциирована с заданной продольной позицией, не должна представлять собой поперечную позицию транспортного средства M в то время, когда продольная позиция транспортного средства M соответствует заданной продольной позиции. Модуль 16 получения значений обнаружения может получать поперечную позицию в то время, когда продольная позиция транспортного средства M является ближайшей к заданной продольной позиции, в качестве поперечной позиции результата управления транспортного средства M, ассоциированной с этой заданной продольной позицией, из числа поперечных позиций транспортного средства M, периодически распознаваемых посредством модуля 11 распознавания позиций транспортного средства.
[0085] В частности, модуль 16 получения значений обнаружения получает поперечные позиции Pw1-Pw4 результата управления, через которые транспортное средство M фактически движется в полосе L движения, проиллюстрированной на фиг. 4, для каждой из заданных продольных позиций G1-G4. Поперечные позиции Pw1-Pw4 результата управления получаются в качестве данных, которые могут сравниваться с целевыми поперечными позициями Tw1-Tw4 в плане движения. Поперечные позиции Pw1-Pw4 результата управления, ассоциированные с заданными продольными позициями G1-G4, получаются в качестве значений координат в ортогональной системе координат XY, описанной выше.
[0086] Модуль 17 вычисления значений оценки вычисляет значение оценки плана движения для области, которая представляет собой объект определения обновления картографической информации. Области в форме тайлов, к примеру, области B1-B3, которые проиллюстрированы на фиг. 3 могут приспосабливаться в качестве областей. Модуль 17 вычисления значений оценки вычисляет значение оценки плана движения для области на основе результата сравнения между целевым значением управления плана движения, сформированным посредством модуля 14 формирования плана движения, и значением обнаружения результатов управления, полученным посредством модуля 16 получения значений обнаружения. Модуль 17 вычисления значений оценки сравнивает целевое значение управления и значение обнаружения результатов управления, которые ассоциированы с одной и той же заданной продольной позицией, между собой. Модуль 17 вычисления значений оценки выполняет сравнение между целевым значением управления и значением обнаружения результатов управления для каждой из заданных продольных позиций, которые присутствуют в области, и вычисляет значение оценки плана движения для области на основе результатов сравнения.
[0087] Модуль 17 вычисления значений оценки может выполнять сравнение между целевой скоростью транспортного средства и скоростью транспортного средства результата управления в качестве сравнения между целевым значением управления и значением обнаружения результатов управления. В случае, если линия временной остановки, которая не включена в картографическую информацию, которая сохраняется в картографической базе 4 данных, присутствует перед транспортным средством M, транспортное средство M замедляется, как только линия временной остановки обнаруживается, и ввиду этого целевая скорость транспортного средства плана движения в зависимости от картографической информации и скорость транспортного средства результата управления, получающаяся в результате управления автоматическим вождением в ответ на фактическое дорожное окружение становятся, отличающимися по значению друг от друга. Модуль 17 вычисления значений оценки использует разность между целевой скоростью транспортного средства и скоростью транспортного средства результата управления в качестве результата сравнения между целевой скоростью транспортного средства и скоростью транспортного средства результата управления. Модуль 17 вычисления значений оценки вычисляет разность (абсолютное значение) между целевой скоростью транспортного средства и скоростью транспортного средства результата управления для каждой из заданных продольных позиций, включенных в область. Модуль 17 вычисления значений оценки вычисляет значение оценки плана движения для области в качестве значения, которое снижается по мере того, как возрастает среднее значение разностей в соответствующих заданных продольных позициях, включенных в область. Модуль 17 вычисления значений оценки также может вычислять обратное число относительно среднего значения разностей в соответствующих заданных продольных позициях, включенных в область, в качестве значения оценки плана движения для области. Модуль 17 вычисления значений оценки также может использовать среднее значение, общую сумму, максимальное значение или минимальное значение разностей вместо среднего значения разностей. Модуль 17 вычисления значений оценки вычисляет значение оценки плана движения, связанное со скоростью транспортного средства, вычисленной из результата сравнения между целевой скоростью транспортного средства и скоростью транспортного средства результата управления.
[0088] Модуль 17 вычисления значений оценки может выполнять сравнение между целевой поперечной позицией и поперечной позицией результата управления в качестве сравнения между целевым значением управления и значением обнаружения результатов управления. Сравнение между целевой поперечной позицией и поперечной позицией результата управления со ссылкой на фиг. 4 является таким, как описано выше, и ввиду этого его описание опускается в данном документе. Модуль 17 вычисления значений оценки вычисляет значение оценки плана движения, связанное с поперечной позицией, вычисленной из результата сравнения между целевой поперечной позицией и поперечной позицией результата управления.
[0089] Модуль 18 определения обновления карт задает пороговое значение оценки для области, которое используется для определения обновления картографической информации на основе позиции области в картографической информации. Модуль 18 определения обновления карт распознает область, через которую проходит целевой маршрут R, на основе картографической информации и целевого маршрута R.
[0090] Модуль 18 определения обновления карт определяет то, представляет область собой область в городе или пригородную область, на основе позиции области в картографической информации. Картографическая информация включает в себя данные по области, указывающие то, представляет область собой область в городе или пригородную область. Модуль 18 определения обновления карт задает пороговое значение оценки для области в городе выше порогового значения оценки для пригородной области, так что область в городе требует более высокого уровня точности картографической информации относительно управления автоматическим вождением, чем пригородная область.
[0091] Помимо этого, модуль 18 определения обновления карт может определять то, представляет область собой область на общей дороге или область на дороге с ограниченным движением, на основе позиции области в картографической информации и целевого маршрута R. Картографическая информация включает в себя данные по дороге, указывающие то, представляет дорога собой дорогу с ограниченным движением или нет. В данном документе, дорога, которая не представляет собой дорогу с ограниченным движением, упоминается как общая дорога. Модуль 18 определения обновления карт задает пороговое значение оценки для области на общей дороге выше порогового значения оценки для области на дороге с ограниченным движением, так что общая дорога требует более высокого уровня точности картографической информации относительно управления автоматическим вождением, чем дорога с ограниченным движением.
[0092] Кроме того, модуль 18 определения обновления карт может определять то, представляет область собой область в частной дороге или нет. В этом случае, картографическая информация включает в себя данные по дороге, указывающие то, представляет дорога собой частную дорогу или нет. Модуль 18 определения обновления карт задает пороговое значение оценки для области в частной дороге выше порогового значения оценки для области на общей дороге, так что частная дорога, которая во многих случаях имеет меньшую ширину дороги, чем общая дорога, требует более высокого уровня точности картографической информации относительно управления автоматическим вождением, чем общая дорога.
[0093] Кроме того, модуль 18 определения обновления карт задает каждое из порогового значения оценки, связанного со скоростью транспортного средства, и порогового значения оценки, связанного с поперечной позицией, на основе на позиции области в картографической информации.
[0094] Модуль 18 определения обновления карт определяет необходимость обновления картографической информации в области на основе значения оценки плана движения, вычисленного посредством модуля 17 вычисления значений оценки, и порогового значения оценки. Модуль 18 определения обновления карт определяет то, меньше или нет значение оценки плана движения для области чем пороговое значение оценки для области. В случае, если значение оценки плана движения для области меньше порогового значения оценки для области, модуль 18 определения обновления карт определяет то, что обновление картографической информации требуется в области.
[0095] Модуль 18 определения обновления карт определяет то, что значение оценки плана движения для области меньше порогового значения оценки в случае, если значение оценки плана движения для области, связанное со скоростью транспортного средства, меньше порогового значения оценки для области, связанного со скоростью транспортного средства, либо в случае, если значение оценки плана движения для области, связанное с поперечной позицией, меньше порогового значения оценки для области, связанного с поперечной позицией. Модуль 18 определения обновления карт также может определять то, что обновление картографической информации требуется в области только в случае, если значение оценки плана движения для области, связанное со скоростью транспортного средства, меньше порогового значения оценки для области, связанного со скоростью транспортного средства, и значение оценки плана движения для области, связанное с поперечной позицией, меньше порогового значения оценки для области, связанного с поперечной позицией.
[0096] Модуль 18 определения обновления карт может не определять необходимость обновления картографической информации в случае, если подвижное препятствие, которое влияет на управление автоматическим вождением, присутствует вокруг транспортного средства M. В этом случае, подвижное препятствие представляет собой велосипед, пешехода, животное, другое транспортное средство и т.п. Модуль 18 определения обновления карт определяет, на основе дорожного окружения около транспортного средства M, распознанного посредством модуля 12 распознавания дорожных окружений, то, присутствует или нет подвижное препятствие на предварительно определенном расстоянии (например, на расстоянии 1 м) от целевой траектории транспортного средства M в плане движения (траектории, проходящей через позицию, идентифицированную из заданной продольной позиции и целевой поперечной позиции, ассоциированных между собой). В случае, если определяется то, что подвижное препятствие присутствует на предварительно определенном расстоянии от целевой траектории транспортного средства M, модуль 18 определения обновления карт может исключать область, в которой выполняется определение, из объекта определения необходимости обновления картографической информации. Модуль 18 определения обновления карт также может исключать область, в которой выполняется определение, из объекта определения необходимости обновления картографической информации в случае, если определяется то, что подвижное препятствие присутствует перед транспортным средством M.
[0097] Обработка формирования плана движения системы автоматического вождения согласно первому варианту осуществления
В дальнейшем в этом документе, описывается обработка формирования плана движения системы 100 автоматического вождения согласно первому варианту осуществления со ссылкой на фиг. 5A. Фиг. 5A является блок-схемой последовательности операций способа, иллюстрирующей обработку формирования плана движения. Блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 5A, выполняется в случае, если операция инициирования управления автоматическим вождением выполняется водителем.
[0098] Как проиллюстрировано на фиг. 5A, система 100 автоматического вождения распознает позицию транспортного средства M на S10 посредством использования модуля 11 распознавания позиций транспортного средства. Модуль 11 распознавания позиций транспортного средства распознает позицию транспортного средства M на карте на основе информации позиции приемного GPS-модуля 1 и картографической информации картографической базы 4 данных. Модуль 11 распознавания позиций транспортного средства также может распознавать позицию транспортного средства посредством использования результата обнаружения посредством внешнего датчика 2 и SLAM-технологии.
[0099] Затем на S11, система 100 автоматического вождения формирует план движения посредством использования модуля 14 формирования плана движения. Модуль 14 формирования плана движения формирует план движения для инструктирования транспортному средству M двигаться по целевому маршруту R на основе позиции транспортного средства M, распознанной посредством модуля 11 распознавания позиций транспортного средства, и целевого маршрута R, заданного заранее посредством навигационной системы 5. Модуль 14 формирования плана движения формирует план движения, продолжающийся до пункта E назначения из текущей позиции транспортного средства M.
[0100] В случае, если план движения сформирован на картографической информации, система 100 автоматического вождения завершает текущую обработку формирования плана движения. Затем система 100 автоматического вождения инициирует обработку формирования плана движения снова в случае, если водитель изменяет целевой маршрут R.
[0101] Управление автоматическим вождением системы автоматического вождения согласно первому варианту осуществления
В дальнейшем в этом документе, описывается управление автоматическим вождением системы 100 автоматического вождения согласно первому варианту осуществления со ссылкой на фиг. 5B. Фиг. 5B является блок-схемой последовательности операций способа, иллюстрирующей управление автоматическим вождением. Блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 5B, выполняется в случае, если план движения сформирован с помощью операции инициирования управления автоматическим вождением, выполняемой водителем.
[0102] Как проиллюстрировано на фиг. 5B, система 100 автоматического вождения распознает позицию транспортного средства M на S20 посредством использования модуля 11 распознавания позиций транспортного средства. Модуль 11 распознавания позиций транспортного средства распознает позицию транспортного средства M на основе информации позиции приемного GPS-модуля 1 и картографической информации картографической базы 4 данных. Модуль 11 распознавания позиций транспортного средства также может распознавать позицию транспортного средства посредством использования SLAM-технологии. Помимо этого, модуль 11 распознавания позиций транспортного средства может оценивать позицию транспортного средства из предыстории изменения скорости транспортного средства для транспортного средства M и предыстории M изменения направления транспортного средства на основе информации скорости транспортного средства из датчика скорости транспортного средства и информации скорости поворота относительно вертикальной оси из датчика скорости поворота относительно вертикальной оси.
[0103] На S20, система 100 автоматического вождения распознает дорожное окружение около транспортного средства M посредством использования модуля 12 распознавания дорожных окружений. Модуль 12 распознавания дорожных окружений распознает позицию линии дорожной разметки полосы движения и дорожное окружение около транспортного средства M на основе результата обнаружения посредством внешнего датчика 2. Помимо этого, система 100 автоматического вождения распознает состояние движения транспортного средства M на S20 посредством использования модуля 13 распознавания состояний движения. Модуль 13 распознавания состояний движения распознает скорость транспортного средства для транспортного средства M на основе информации скорости транспортного средства из датчика скорости транспортного средства и распознает направление транспортного средства M на основе информации скорости поворота относительно вертикальной оси из датчика скорости поворота относительно вертикальной оси.
[0104] Затем на S21, система 100 автоматического вождения формирует краткосрочный план движения посредством использования модуля 14 формирования плана движения. Модуль 14 формирования плана движения формирует краткосрочный план движения на основе позиции транспортного средства M, дорожного окружения около транспортного средства M, состояния движения транспортного средства M и плана движения. Модуль 14 формирования плана движения формирует краткосрочный план движения в ответ на фактическое дорожное окружение. Модуль 14 формирования плана движения формирует краткосрочный план движения в качестве плана для движения транспортного средства M в диапазоне обнаружения внешнего датчика 2.
[0105] Затем на S22, система 100 автоматического вождения выполняет управление автоматическим вождением для транспортного средства M посредством использования модуля 15 управления движением. Модуль 15 управления движением выполняет управление автоматическим вождением для инструктирования транспортному средству M двигаться в соответствии с фактическим дорожным окружением на основе краткосрочного плана движения. Модуль 15 управления движением выполняет управление автоматическим вождением для транспортного средства M посредством управления выводом привода 6 со значением управления команды.
[0106] Затем система 100 автоматического вождения повторяет обработку, начиная с S20, в случае, если выполняется управление автоматическим вождением для транспортного средства M. В случае, если управление автоматическим вождением завершено или прекращено, система 100 автоматического вождения завершает обработку управления автоматическим вождением, даже если обработка управления автоматическим вождением продолжается.
[0107] Обработка получения значений обнаружения результатов управления системы определения обновления карт согласно первому варианту осуществления
В дальнейшем в этом документе, описывается обработка получения значений обнаружения результатов управления системы 200 определения обновления карт согласно первому варианту осуществления. Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей обработку получения значений обнаружения результатов управления. Блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 6, выполняется в случае, если инициируется управление автоматическим вождением для транспортного средства M.
[0108] Как проиллюстрировано на фиг. 6, система 200 определения обновления карт получает значение обнаружения результатов управления на S30 посредством использования модуля 16 получения значений обнаружения. Модуль 16 получения значений обнаружения получает значение обнаружения результатов управления в ассоциации с заданной продольной позицией на целевом маршруте R. Модуль 16 получения значений обнаружения получает скорость транспортного средства результата управления транспортного средства M, ассоциированную с каждой из заданных продольных позиций, на основе продольной позиции транспортного средства M, распознанной посредством модуля 11 распознавания позиций транспортного средства, и информации скорости транспортного средства из датчика скорости транспортного средства. Модуль 16 получения значений обнаружения получает поперечную позицию результата управления транспортного средства M, ассоциированную с каждой из заданных продольных позиций, на основе продольной позиции транспортного средства M и поперечной позиции транспортного средства M, распознанных посредством модуля 11 распознавания позиций транспортного средства.
[0109] Модуль 16 получения значений обнаружения получает значение обнаружения результатов управления в случае, если продольная позиция транспортного средства M достигает заданной продольной позиции. Модуль 16 получения значений обнаружения также может совместно получать значение обнаружения результатов управления посредством заданной продольной позиции из данных относительно предыдущей позиции (продольной позиции и поперечной позиции) транспортного средства M и данных относительно предыдущей скорости транспортного средства для транспортного средства M (данных относительно скорости транспортного средства, ассоциированной с продольной позицией). Модуль 16 получения значений обнаружения завершает текущую обработку получения в случае, если получены значения обнаружения результатов управления, ассоциированные со всеми заданными продольными позициями, через которые транспортное средство M проходит в ходе управления автоматическим вождением.
[0110] Модуль 16 получения значений обнаружения не обязательно должен выполнять обработку получения в ходе управления автоматическим вождением для транспортного средства M. В случае, если значение обнаружения результатов управления получается на основе предыдущих данных относительно транспортного средства M, модуль 16 получения значений обнаружения может инициировать обработку получения, когда транспортное средство M находится в неподвижном состоянии или состоянии парковки. Затем обработка получения может выполняться, когда имеется запас по пропускной способности обработки вычисления ECU 10. Модуль 16 получения значений обнаружения может совместно выполнять обработку получения для значений обнаружения результатов управления в течение предварительно определенного периода времени (к примеру, одного дня).
[0111] Обработка определения обновления карт системы определения обновления карт согласно первому варианту осуществления
В дальнейшем в этом документе, описывается обработка определения обновления карт системы 200 определения обновления карт согласно первому варианту осуществления. Фиг. 7 является блок-схемой последовательности операций способа, иллюстрирующей обработку определения обновления карт. Блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 7, инициируется в случае, если обработка получения целевого значения результата управления, которая проиллюстрирована на фиг. 6, завершается в области.
[0112] Как проиллюстрировано на фиг. 7, система 200 определения обновления карт вычисляет значение оценки плана движения для области на S40 посредством использования модуля 17 вычисления значений оценки. Модуль 17 вычисления значений оценки вычисляет значение оценки плана движения для области на основе результата сравнения между целевым значением управления плана движения, сформированным посредством модуля 14 формирования плана движения, и значением обнаружения результатов управления, полученным посредством модуля 16 получения значений обнаружения. Модуль 17 вычисления значений оценки вычисляет значение оценки плана движения для области на основе разности между целевым значением управления и значением обнаружения результатов управления посредством заданной продольной позиции.
[0113] Затем на S41, система 200 определения обновления карт задает пороговое значение оценки для области посредством использования модуля 18 определения обновления карт. Модуль 18 определения обновления карт задает пороговое значение оценки для области на основе позиции области в картографической информации. Порядок S40 и S41 может быть изменен на противоположный. S40 и S41 также могут выполняться одновременно.
[0114] Затем на S42, система 200 определения обновления карт определяет то, меньше или нет значение оценки плана движения для области, чем пороговое значение оценки посредством использования модуля 18 определения обновления карт. Модуль 18 определения обновления карт определяет то, меньше или нет значение оценки плана движения для области чем пороговое значение оценки для области, на основе значения оценки плана движения, вычисленного посредством модуля 17 вычисления значений оценки, и порогового значения оценки набора. Модуль 18 определения обновления карт выполняет вышеописанное определение относительно каждой области, в которой вычислено значение оценки плана движения. Система 200 определения обновления карт позволяет обработке переходить к S44 в случае, если определяется то, что значение оценки плана движения для области меньше порогового значения оценки для области. Система 200 определения обновления карт позволяет обработке переходить к S43 в случае, если определяется то, что значение оценки плана движения для области не меньше порогового значения оценки для области.
[0115] На S43, система 200 определения обновления карт определяет то, что обновление картографической информации не требуется в этой области. На S44, система 200 определения обновления карт определяет то, что обновление картографической информации требуется в этой области. После обработки S43 или S44, система 200 определения обновления карт завершает текущую обработку определения обновления карт. Система 200 определения обновления карт повторяет обработку из S40 в случае, если получено новое целевое значение результата управления.
[0116] Преимущество системы определения обновления карт согласно первому варианту осуществления
Система 200 определения обновления карт согласно первому варианту осуществления, которая описана выше, способна к определению необходимости обновления картографической информации в области на основе значения оценки плана движения для области, вычисленного из результата сравнения между целевым значением управления и значением обнаружения результатов управления, и порогового значения оценки, так что целевое значение управления плана движения в зависимости от картографической информации и значение обнаружения результатов управления, получающееся в результате управления автоматическим вождением, которое реагирует на фактическое дорожное окружение, отличаются друг от друга в случае, если картографическая информация является несогласованной с фактическим дорожным окружением. Соответственно, с использованием этой системы 200 определения обновления карт, необходимость обновления картографической информации может определяться надлежащим образом посредством использования управления автоматическим вождением для транспортного средства.
[0117] Согласно этой системе 200 определения обновления карт, можно определять то, что картографическая информация должна обновляться в случае, если картографическая информация содержит ошибку, которая приводит к возникновению достаточной разности между целевым значением управления плана движения и значением обнаружения результатов управления, получающимся в результате управления автоматическим вождением, и ввиду этого затраты на поддержание картографической информации могут значительно уменьшаться по сравнению со случаем, в котором картографическая информация обновляется посредством отправки тестового автомобиля каждый раз, когда получается информация относительно изменения дорожного окружения, обусловленного дорожными работами и т.п. Помимо этого, в случае, если достаточная разность не возникает между целевым значением управления плана движения и значением обнаружения результатов управления, получающимся в результате управления автоматическим вождением, эта система 200 определения обновления карт определяет то, что картографическая информация не должна обновляться, даже если картографическая информация содержит ошибку. Соответственно, может исключаться выполнение обновления картографической информации, которое не требуется для управления автоматическим вождением.
[0118] Поскольку система 200 определения обновления карт задает пороговое значение оценки для области на основе позиции области в картографической информации картографической базы 4 данных, может выполняться надлежащее определение необходимости обновления картографической информации в соответствии с позицией области. В частности, система 200 определения обновления карт может определять с большей вероятностью то, что карта должна обновляться, посредством задания порогового значения оценки для области в городе выше порогового значения оценки для пригородной области, так что область в городе требует более высокого уровня точности картографической информации относительно управления автоматическим вождением, чем пригородная область, и ввиду этого способна к поддержанию достаточно точной картографической информации относительно области в городе.
[0119] Второй вариант осуществления
Ниже описываются система 300 автоматического вождения и система 400 определения обновления карт согласно второму варианту осуществления. Второй вариант осуществления значительно отличается от первого варианта осуществления тем, что сервер, отделенный от транспортного средства M, составляет систему 400 определения обновления карт, и второй вариант осуществления определяет необходимость обновления картографической информации серверной картографической базы данных вместо бортовой картографической базы данных. Идентичные ссылки с номерами используются для того, чтобы ссылаться на конфигурации, которые являются общими для первого и второго вариантов осуществления либо эквивалентными конфигурациям первого варианта осуществления, и их подробное описание опускается в данном документе.
[0120] Конфигурация системы автоматического вождения согласно второму варианту осуществления
Во-первых, описывается конфигурация системы 300 автоматического вождения со ссылкой на фиг. 8. Фиг. 8 является блок-схемой, иллюстрирующей систему 300 автоматического вождения согласно второму варианту осуществления. Как проиллюстрировано на фиг. 8, система 300 автоматического вождения содержит ECU 30 для выполнения управления автоматическим вождением для транспортного средства M. Приемный GPS-модуль 1, внешний датчик 2, внутренний датчик 3, навигационная система 5, привод 6, модуль 7 связи и бортовая картографическая база 31 данных соединяются с ECU 30. Бортовая картографическая база 31 данных представляет собой картографическую базу данных, которая устанавливается в транспортном средстве M. Картографическая информация, аналогичная картографической информации из картографической базы 4 данных согласно первому варианту осуществления, сохраняется в бортовой картографической базе 31 данных.
[0121] ECU 30 содержит модуль 11 распознавания позиций транспортного средства, модуль 12 распознавания дорожных окружений, модуль 13 распознавания состояний движения, модуль 14 формирования плана движения и модуль 15 управления движением. Функции этих конфигураций являются аналогичными функциям согласно первому варианту осуществления.
[0122] Модуль 14 формирования плана движения согласно второму варианту осуществления формирует план движения транспортного средства M по целевому маршруту R навигационной системы 5 на основе картографической информации бортовой картографической базы 31 данных. Модуль 14 формирования плана движения формирует краткосрочный план движения на основе позиции транспортного средства M, распознанной посредством модуля 11 распознавания позиций транспортного средства, дорожного окружения около транспортного средства M, распознанного посредством модуля 12 распознавания дорожных окружений, состояния движения транспортного средства M, распознанного посредством модуля 13 распознавания состояний движения, и сформированного плана движения. Модуль 14 формирования плана движения согласно второму варианту осуществления не составляет систему 400 определения обновления карт.
[0123] Модуль 15 управления движением выполняет управление автоматическим вождением для транспортного средства M на основе краткосрочного плана движения, сформированного посредством модуля 14 формирования плана движения, и посредством управления выводом привода 6. В случае, если управление автоматическим вождением для транспортного средства M инициируется, система 300 автоматического вождения передает информацию относительно целевого маршрута R в систему 400 определения обновления карт через модуль 7 связи. В случае, если управление автоматическим вождением для транспортного средства M завершается, система 300 автоматического вождения передает информацию относительно позиции транспортного средства M, связанную с управлением автоматическим вождением, и информацию относительно скорости транспортного средства для транспортного средства M, связанную с управлением автоматическим вождением, в систему 400 определения обновления карт через модуль 7 связи.
[0124] Конфигурация системы определения обновления карт согласно второму варианту осуществления
В дальнейшем в этом документе, описывается система 400 определения обновления карт со ссылкой на фиг. 9. Фиг. 9 является блок-схемой, иллюстрирующей систему 400 определения обновления карт согласно второму варианту осуществления. Как проиллюстрировано на фиг. 9, система 400 определения обновления карт сконфигурирована на сервере 40. Сервер 40 представляет собой сервер, который располагается в инфраструктурном объекте центра управления картографической информацией. Сервер 40 представляет собой компьютер, который включает в себя CPU и модуль хранения. HDD и т.п. составляют модуль хранения. Множество компьютеров также могут составлять сервер 40.
[0125] Модуль 50 связи для осуществления беспроводной связи с транспортным средством M (системой 300 автоматического вождения) соединяется с сервером 40. Модуль 50 связи осуществляет беспроводную связь с модулем 7 связи транспортного средства M через антенну, которая устанавливается в инфраструктурном объекте центра управления картографической информацией. Сервер 40 выполняет передачу и прием информации на основе беспроводной связи с несколькими транспортными средствами, включающими в себя транспортное средство M, через модуль 50 связи. Доминирующая сеть беспроводной связи, к примеру, сеть мобильной телефонной связи, может использоваться для передачи и приема информации.
[0126] Система 400 определения обновления карт содержит картографическую базу 41 данных, модуль 42 получения информации, модуль 43 формирования моделированного плана движения, модуль 44 получения значений обнаружения, модуль 45 вычисления значений оценки и модуль 46 определения обновления карт.
[0127] Картографическая база 41 данных представляет собой базу данных, которая располагается в модуле хранения сервера 40. Картографическая информация, аналогичная картографической информации картографической базы 4 данных согласно первому варианту осуществления, сохраняется в картографической базе 41 данных. В центре управления картографической информацией, картографическая информация, которая сохраняется в картографической базе 41 данных, управляется таким образом, что она становится последней информацией, посредством отображения информации, собранной посредством тестового автомобиля. Картографическая информация из бортовой картографической базы 31 данных обновляется посредством картографической информации, которая сохраняется в картографической базе 41 данных, передаваемой в транспортное средство M. Картографическая информация картографической базы 41 данных используется для обновления бортовых картографических баз данных нескольких транспортных средств, включающих в себя транспортное средство M. Картографическая информация, которая сохраняется в картографической базе 41 данных, и картографическая информация бортовой картографической базы 31 данных не обязательно должны соответствовать друг другу.
[0128] Модуль 42 получения информации располагается на сервере 40 и получает информацию из транспортного средства M через модуль 50 связи. В случае, если управление автоматическим вождением для транспортного средства M инициируется, модуль 42 получения информации получает информацию относительно целевого маршрута R для управления автоматическим вождением из транспортного средства M. Модуль 42 получения информации может совместно получать информацию относительно целевого маршрута R, связанную с управлением автоматическим вождением, в течение предварительно определенного периода времени (к примеру, одного дня).
[0129] Модуль 43 формирования моделированного плана движения формирует моделированный план движения на основе целевого маршрута R транспортного средства M, полученного посредством модуля 42 получения информации, и картографической информации картографической базы 41 данных. Моделированный план движения представляет собой план, который формируется в качестве моделирования, и не используется для фактического управления автоматическим вождением для транспортного средства M. Моделированный план движения отличается от плана движения системы 300 автоматического вождения, сформированного на основе бортовой картографической базы 31 данных, и формируется на основе картографической информации картографической базы 41 данных сервера 40.
[0130] Моделированный план движения включает в себя моделированное целевое значение управления для транспортного средства M, которое зависит от заданной продольной позиции на целевом маршруте R транспортного средства M. Моделированное целевое значение управления является моделированным целевым значением управления для транспортного средства M в моделированном плане движения. Моделированное целевое значение управления задается в ассоциации с каждой из заданных продольных позиций на целевом маршруте R. Моделированное целевое значение управления включает в себя моделированную целевую поперечную позицию транспортного средства M и моделированную целевую скорость транспортного средства для транспортного средства M. Моделированная целевая поперечная позиция представляет собой моделированную целевую поперечную позицию управления транспортного средства в моделированном плане движения. Моделированная целевая скорость транспортного средства представляет собой моделированную целевую скорость транспортного средства управления транспортного средства в моделированном плане движения.
[0131] Модуль 43 формирования моделированного плана движения формирует моделированный план движения посредством задания заданных продольных позиций на целевом маршруте R с предварительно определенными интервалами (к примеру, 1 м) и задания моделированного целевого значения управления для каждой из заданных продольных позиций. Способ формирования моделированного плана движения является аналогичным способу, посредством которого план движения формируется посредством модуля 14 формирования плана движения системы 300 автоматического вождения, и ввиду этого его подробное описание опускается в данном документе. Способ формирования моделированного плана движения не должен быть полностью идентичным способу, посредством которого план движения формируется посредством модуля 14 формирования плана движения системы 300 автоматического вождения. Может возникать несущественная разность, к примеру, разность версий между способом формирования моделированного плана движения и способом формирования плана движения.
[0132] Модуль 42 получения информации может получать целевое значение управления для транспортного средства M, сформированное посредством модуля 14 формирования плана движения, вместо информации относительно целевого маршрута R. В этом случае, модуль 43 формирования моделированного плана движения может формировать моделированный план движения на основе целевого значения управления и картографической информации даже без информации относительно целевого маршрута R.
[0133] Модуль 44 получения значений обнаружения располагается на сервере 40 и получает значение обнаружения результатов управления, получающееся в результате управления автоматическим вождением для транспортного средства M. Модуль 44 получения значений обнаружения получает, через модуль 50 связи, информацию относительно позиции транспортного средства M (информацию относительно продольной позиции и поперечной позиции), связанную с управлением автоматическим вождением, и информацию относительно скорости транспортного средства для транспортного средства M, связанную с управлением автоматическим вождением. Информация относительно скорости транспортного средства для транспортного средства M получается в ассоциации с информацией относительно продольной позиции транспортного средства M. Информация относительно поперечной позиции транспортного средства M также получается в ассоциации с информацией относительно продольной позиции транспортного средства M.
[0134] Модуль 44 получения значений обнаружения идентифицирует скорость транспортного средства (скорость транспортного средства результата управления) посредством заданной продольной позиции и поперечную позицию (поперечную позицию результата управления) посредством заданной продольной позиции на основе заданных продольных позиций на целевом маршруте R, заданных посредством модуля 43 формирования моделированного плана движения. Таким образом, модуль 44 получения значений обнаружения получает целевое значение результата управления (скорость транспортного средства результата управления и поперечную позицию результата управления), получающееся в результате управления автоматическим вождением в ассоциации с заданной продольной позицией на целевом маршруте R. Скорость транспортного средства результата управления, которая ассоциирована с заданной продольной позицией, может представлять собой скорость транспортного средства в то время, когда продольная позиция транспортного средства M является ближайшей к заданной продольной позиции, из числа скоростей транспортного средства для транспортного средства M, периодически обнаруживаемых посредством датчика скорости транспортного средства. Поперечная позиция результата управления, которая ассоциирована с заданной продольной позицией, может представлять собой поперечную позицию в то время, когда продольная позиция транспортного средства M является ближайшей к заданной продольной позиции, из числа поперечных позиций транспортного средства M, периодически распознаваемых посредством модуля 11 распознавания позиций транспортного средства. Модуль 44 получения значений обнаружения может совместно получать целевые значения результата управления, получающиеся в результате управления автоматическим вождением в течение предварительно определенного периода времени (к примеру, одного дня).
[0135] Модуль 45 вычисления значений оценки вычисляет значение оценки моделированного плана движения для области, которая представляет собой объект определения обновления картографической информации. Область, аналогичная области согласно первому варианту осуществления, может приспосабливаться в качестве области.
[0136] Модуль 45 вычисления значений оценки вычисляет значение оценки моделированного плана движения для области на основе результата сравнения между моделированным целевым значением управления моделированного плана движения, сформированным посредством модуля 43 формирования моделированного плана движения, и значением обнаружения результатов управления, полученным посредством модуля 44 получения значений обнаружения. Модуль 45 вычисления значений оценки выполняет сравнение между моделированным целевым значением управления и значением обнаружения результатов управления, ассоциированным с одной и той же заданной продольной позицией. Модуль 45 вычисления значений оценки выполняет сравнение между моделированным целевым значением управления и значением обнаружения результатов управления для каждой из заданных продольных позиций, которые присутствуют в области, и вычисляет значение оценки моделированного плана движения для области на основе результатов сравнения. Модуль 45 вычисления значений оценки вычисляет значение оценки моделированного плана движения для области на основе разности между моделированным целевым значением управления и значением обнаружения результатов управления посредством заданной продольной позиции. Сравнение между моделированным целевым значением управления и значением обнаружения результатов управления может выполняться посредством способа, который является аналогичным способу для сравнения между целевым значением управления и значением обнаружения результатов управления согласно первому варианту осуществления. Помимо этого, вычисление значения оценки моделированного плана движения может выполняться посредством способа, который является аналогичным способу для вычисления значения оценки плана движения согласно первому варианту осуществления. Модуль 45 вычисления значений оценки вычисляет каждое из значения оценки моделированного плана движения, связанного со скоростью транспортного средства, и значения оценки моделированного плана движения, связанного с поперечной позицией.
[0137] Модуль 46 определения обновления карт задает пороговое значение оценки для области, которое используется для определения обновления картографической информации, на основе позиции области в картографической информации картографической базы 41 данных. Модуль 46 определения обновления карт распознает область, через которую проходит целевой маршрут R, на основе позиции области в картографической информации и целевого маршрута R. Модуль 46 определения обновления карт задает каждое из порогового значения оценки, связанного со скоростью транспортного средства, и порогового значения оценки, связанного с поперечной позицией. Модуль 46 определения обновления карт может задавать пороговое значение оценки для области посредством способа, аналогичного способу согласно первому варианту осуществления. Аналогично, значение, идентичное пороговому значению оценки согласно первому варианту осуществления, может использоваться в качестве порогового значения оценки.
[0138] Модуль 46 определения обновления карт определяет необходимость обновления картографической информации в области на основе значения оценки моделированного плана движения, вычисленного посредством модуля 45 вычисления значений оценки, и порогового значения оценки. Модуль 46 определения обновления карт определяет то, меньше или нет значение оценки моделированного плана движения для области чем пороговое значение оценки. В случае, если определяется то, что значение оценки моделированного плана движения для области меньше порогового значения оценки, модуль 46 определения обновления карт определяет то, что обновление картографической информации требуется в области. Модуль 46 определения обновления карт определяет то, что значение оценки моделированного плана движения для области меньше порогового значения оценки для области в случае, если значение оценки моделированного плана движения для области, связанное со скоростью транспортного средства, меньше порогового значения оценки для области, связанного со скоростью транспортного средства, либо в случае, если значение оценки моделированного плана движения для области, связанное с поперечной позицией, меньше порогового значения оценки для области, связанного с поперечной позицией. Модуль 46 определения обновления карт также может определять то, что обновление картографической информации требуется в области только в случае, если значение оценки моделированного плана движения для области, связанное со скоростью транспортного средства, меньше порогового значения оценки для области, связанного со скоростью транспортного средства, и значение оценки моделированного плана движения для области, связанное с поперечной позицией, меньше порогового значения оценки для области, связанного с поперечной позицией.
[0139] Обработка формирования моделированного плана движения системы определения обновления карт согласно второму варианту осуществления
В дальнейшем в этом документе, описывается обработка формирования моделированного плана движения системы 400 определения обновления карт согласно второму варианту осуществления со ссылкой на фиг. 10A. Фиг. 10A является блок-схемой последовательности операций способа, иллюстрирующей обработку формирования моделированного плана движения системы 400 определения обновления карт согласно второму варианту осуществления. Блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 10A, инициируется посредством приема информации, связанной с целевым маршрутом R управления автоматическим вождением, из транспортного средства M.
[0140] Как проиллюстрировано на фиг. 10A, система 400 определения обновления карт получает информацию относительно целевого маршрута R транспортного средства M на S50 посредством использования модуля 42 получения информации. Модуль 42 получения информации получает информацию относительно целевого маршрута R транспортного средства M посредством беспроводной связи через модуль 50 связи.
[0141] Затем на S51, система 400 определения обновления карт формирует моделированный план движения посредством использования модуля 43 формирования моделированного плана движения. Модуль 43 формирования моделированного плана движения формирует моделированный план движения в качестве моделирования, в котором транспортное средство M движется по целевому маршруту R, как результат управления автоматическим вождением на основе картографической информации, сохраненной в картографической базе 41 данных сервера 40, и целевого маршрута R. Система 400 определения обновления карт завершает текущую обработку формирования моделированного плана движения в случае, если моделированный план движения сформирован.
[0142] Система 400 определения обновления карт также может инициировать обработку формирования моделированного плана движения после получения целевого значения результата управления, получающегося в результате управления автоматическим вождением для транспортного средства M. Управление автоматическим вождением посредством системы 300 автоматического вождения является аналогичным управлению автоматическим вождением согласно первому варианту осуществления, и ввиду этого его описание опускается в данном документе.
[0143] Обработка получения значений обнаружения результатов управления системы определения обновления карт согласно второму варианту осуществления
В дальнейшем в этом документе, описывается обработка получения значений обнаружения результатов управления системы 400 определения обновления карт согласно второму варианту осуществления. Фиг. 10B является блок-схемой последовательности операций способа, иллюстрирующей обработку получения значений обнаружения результатов управления системы 400 определения обновления карт согласно второму варианту осуществления. Блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 10B, выполняется в случае, если информация относительно позиции транспортного средства M, связанная с управлением автоматическим вождением, или информация относительно скорости транспортного средства для транспортного средства M, связанная с управлением автоматическим вождением, принимается из транспортного средства M.
[0144] Как проиллюстрировано на фиг. 10B, система 400 определения обновления карт получает целевое значение результата управления, получающееся в результате управления автоматическим вождением, на S60, посредством использования модуля 44 получения значений обнаружения. Модуль 44 получения значений обнаружения получает целевое значение результата управления, получающееся в результате управления автоматическим вождением, в ассоциации с заданной продольной позицией на целевом маршруте R на основе информации относительно позиции транспортного средства M и информации относительно скорости транспортного средства для транспортного средства M, связанной с управлением автоматическим вождением. Модуль 44 получения значений обнаружения завершает текущую обработку получения в случае, если получены значения обнаружения результатов управления, ассоциированные со всеми заданными продольными позициями, через которые транспортное средство M проходит в ходе управления автоматическим вождением. Во втором варианте осуществления, обработка формирования моделированного плана движения и обработка получения значений обнаружения результатов управления могут выполняться одновременно.
[0145] Обработка определения обновления карт системы определения обновления карт согласно второму варианту осуществления
В дальнейшем в этом документе, описывается обработка определения обновления карт системы 400 определения обновления карт согласно второму варианту осуществления. Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей обработку определения обновления карт системы 400 определения обновления карт согласно второму варианту осуществления. Блок-схема последовательности операций способа, которая проиллюстрирована на фиг. 11, выполняется в случае, если обработка формирования моделированного плана движения и обработка получения целевого значения результата управления завершаются.
[0146] Как проиллюстрировано на фиг. 11, система 400 определения обновления карт вычисляет значение оценки моделированного плана движения для области на S70 посредством использования модуля 45 вычисления значений оценки. Модуль 45 вычисления значений оценки вычисляет значение оценки моделированного плана движения для области на основе результата сравнения между моделированным целевым значением управления моделированного плана движения, сформированного посредством модуля 43 формирования моделированного плана движения, и значением обнаружения результатов управления, полученным посредством модуля 44 получения значений обнаружения. Модуль 45 вычисления значений оценки вычисляет значение оценки моделированного плана движения для области на основе разности между моделированным целевым значением управления и значением обнаружения результатов управления посредством заданной продольной позиции.
[0147] Затем на S71, система 400 определения обновления карт задает пороговое значение оценки для области посредством использования модуля 46 определения обновления карт. Модуль 46 определения обновления карт задает пороговое значение оценки для области на основе позиции области в картографической информации. Порядок S70 и S71 может быть изменен на противоположный. S70 и S71 также могут выполняться одновременно.
[0148] Затем на S72, система 400 определения обновления карт определяет, посредством использования модуля 46 определения обновления карт, присутствие или отсутствие области, в которой значение оценки моделированного плана движения для области меньше порогового значения оценки для области. Система 400 определения обновления карт позволяет обработке переходить к S74 в случае, если определяется то, что значение оценки моделированного плана движения для области меньше порогового значения оценки для области. Система 400 определения обновления карт позволяет обработке переходить к S73 в случае, если определяется то, что значение оценки моделированного плана движения для области не меньше порогового значения оценки для области.
[0149] На S73, система 400 определения обновления карт определяет то, что обновление картографической информации не требуется в этой области. На S74, система 400 определения обновления карт определяет то, что обновление картографической информации требуется в этой области. После обработки S73 или S74, система 400 определения обновления карт завершает текущую обработку определения обновления карт.
[0150] Преимущество системы определения обновления карт согласно второму варианту осуществления
Система 400 определения обновления карт согласно второму варианту осуществления, которая описана выше, способна к определению необходимости обновления картографической информации в картографической базе 41 данных на основе значения оценки моделированного плана движения, вычисленного из результата сравнения между моделированным целевым значением управления и значением обнаружения результатов управления, и порогового значения оценки, так что моделированное целевое значение управления моделированного плана движения в зависимости от картографической информации и значение обнаружения результатов управления, получающееся в результате управления автоматическим вождением, которое реагирует на фактическое дорожное окружение, отличаются друг от друга в случае, если картографическая информация в картографической базе 41 данных сервера 40 является несогласованной с фактическим дорожным окружением. Соответственно, с использованием этой системы 400 определения обновления карт, необходимость обновления картографической информации может определяться надлежащим образом в картографической базе 41 данных сервера 40 посредством использования управления автоматическим вождением для транспортного средства. Помимо этого, эта система 400 определения обновления карт определяет то, что картографическая информация не должна обновляться, даже если картографическая информация в картографической базе 41 данных содержит ошибку в случае, если достаточная разность не возникает между моделированным целевым значением управления моделированного плана движения и значением обнаружения результатов управления, получающимся в результате управления автоматическим вождением. Соответственно, может исключаться выполнение обновления картографической информации, которое не требуется для управления автоматическим вождением.
[0151] Согласно этой системе 400 определения обновления карт, можно определять то, что картографическая информация картографической базы 41 данных должна обновляться в случае, если картографическая информация содержит ошибку, которая приводит к возникновению достаточной разности между моделированным целевым значением управления моделированного плана движения и значением обнаружения результатов управления, получающимся в результате управления автоматическим вождением, и ввиду этого затраты на поддержание картографической информации могут значительно уменьшаться по сравнению со случаем, в котором картографическая информация обновляется посредством отправки тестового автомобиля каждый раз, когда получается информация относительно изменения дорожного окружения, обусловленного дорожными работами и т.п. Помимо этого, эта система 400 определения обновления карт задает пороговое значение оценки для области на основе позиции области в картографической информации картографической базы 41 данных, и ввиду этого может выполняться надлежащее определение необходимости обновления картографической информации в соответствии с позицией области.
[0152] Изобретение не ограничено вариантами осуществления изобретения, которые описаны выше. Изобретение может реализовываться в различных формах с различными модификациями и улучшениями, добавляемыми в вышеописанные варианты осуществления на основе сведений специалистов в данной области техники.
[0153] Примеры модификаций целевого значения управления (моделированного целевого значения управления) и целевого значения результата управления
Целевое значение управления плана движения не обязательно должно включать в себя как целевую поперечную позицию, так и целевую скорость транспортного средства. Модуль 14 формирования плана движения согласно первому варианту осуществления может формировать план движения, который включает в себя только любое одно из целевой поперечной позиции и целевой скорости транспортного средства. В этом случае, модуль 16 получения значений обнаружения может получать только целевое значение результата управления, т.е. поперечную позицию результата управления или скорость транспортного средства результата управления, соответствующую целевой поперечной позиции или целевой скорости транспортного средства, которая включена в план движения.
[0154] Модуль 14 формирования плана движения может использовать целевой угол поворота при рулении транспортного средства M вместо целевой поперечной позиции транспортного средства M. Целевой угол поворота при рулении является целевым значением угла поворота при рулении для транспортного средства M при управлении автоматическим вождением. Помимо этого, крутящий момент поворота при рулении, угол относительно вертикальной оси или скорость поворота относительно вертикальной оси могут использоваться вместо угла поворота при рулении. Кроме того, модуль 14 формирования плана движения может использовать целевое ускорение транспортного средства M вместо целевой скорости транспортного средства для транспортного средства M. Целевое ускорение является целевым значением ускорения для транспортного средства M при управлении автоматическим вождением.
[0155] В этом случае, модуль 16 получения значений обнаружения получает угол поворота при рулении результата управления в качестве значения обнаружения результатов управления, соответствующего целевому углу поворота при рулении. Угол поворота при рулении результата управления представляет собой угол поворота при рулении транспортного средства M в ходе управления автоматическим вождением, который обнаруживается в заданной продольной позиции. Угол поворота при рулении результата управления обнаруживается посредством датчика угла поворота при рулении транспортного средства M. Помимо этого, модуль 16 получения значений обнаружения получает ускорение результата управления в качестве значения обнаружения результатов управления, соответствующего целевому ускорению. Ускорение результата управления представляет собой ускорение (замедление) транспортного средства M в ходе управления автоматическим вождением, которое обнаруживается в заданной продольной позиции. Ускорение результата управления обнаруживается посредством датчика ускорения транспортного средства M.
[0156] Аналогично, модуль 43 формирования моделированного плана движения согласно второму варианту осуществления может формировать моделированный план движения, который включает в себя только любое одно из моделированной целевой поперечной позиции и моделированной целевой скорости транспортного средства. В этом случае, модуль 44 получения значений обнаружения может получать только целевое значение результата управления, т.е. поперечную позицию результата управления или скорость транспортного средства результата управления, соответствующую моделированной целевой поперечной позиции или моделированной целевой скорости транспортного средства, которая включена в моделированный план движения.
[0157] Модуль 43 формирования моделированного плана движения может использовать моделированный целевой угол поворота при рулении транспортного средства M вместо моделированной целевой поперечной позиции транспортного средства M. Моделированный целевой угол поворота при рулении представляет собой моделированный угол поворота при рулении транспортного средства M, который является целью управления в моделированном плане движения. Крутящий момент поворота при рулении, угол относительно вертикальной оси или скорость поворота относительно вертикальной оси могут использоваться вместо угла поворота при рулении. Модуль 43 формирования моделированного плана движения может использовать моделированное целевое ускорение транспортного средства M вместо моделированной целевой скорости транспортного средства для транспортного средства M. Моделированное целевое ускорение представляет собой моделированное ускорение транспортного средства M, которое является целью управления в моделированном плане движения. В этом случае, модуль 44 получения значений обнаружения получает угол поворота при рулении результата управления в качестве значения обнаружения результатов управления, соответствующего моделированному целевому углу поворота при рулении. Помимо этого, модуль 44 получения значений обнаружения получает ускорение результата управления в качестве значения обнаружения результатов управления, соответствующего моделированному целевому ускорению.
[0158] Пример модификации результата сравнения между целевым значением управления (моделированным целевым значением управления) и значением обнаружения результатов управления
Модуль 17 вычисления значений оценки согласно первому варианту осуществления не обязательно должен использовать разность между целевым значением управления и значением обнаружения результатов управления в качестве результата сравнения между целевым значением управления плана движения и значением обнаружения результатов управления, получающимся в результате управления автоматическим вождением. Модуль 17 вычисления значений оценки может использовать соотношение между целевым значением управления и значением обнаружения результатов управления вместо этого в качестве результата сравнения между целевым значением управления плана движения и значением обнаружения результатов управления, получающимся в результате управления автоматическим вождением. Результат сравнения может становиться безразмерной величиной посредством использования соотношения между целевым значением управления и значением обнаружения результатов управления, как описано выше. В этом случае, значение оценки может становиться безразмерной величиной посредством приспособления соотношения между целевым значением управления и значением обнаружения результатов управления в качестве значения оценки плана движения. Другими словами, значение оценки в качестве безразмерной величины может вычисляться для каждой скорости транспортного средства и поперечной позиции, которые имеют различные единицы. Затем пороговое значение оценки, которое используется посредством модуля 18 определения обновления карт, также может становиться безразмерной величиной, и идентичное пороговое значение оценки может приспосабливаться вместо задания каждого из порогового значения оценки, связанного со скоростью транспортного средства (единицы: км/ч), и порогового значения оценки, связанного с поперечной позицией (единицы: м). Аналогично, в модуле 45 вычисления значений оценки согласно второму варианту осуществления, соотношение между моделированным целевым значением управления и значением обнаружения результатов управления может использоваться в качестве результата сравнения между моделированным целевым значением управления моделированного плана движения и значением обнаружения результатов управления, получающимся в результате управления автоматическим вождением.
[0159] Пример модификации вычисления значения оценки плана движения (моделированного плана движения)
Модуль 17 вычисления значений оценки согласно первому варианту осуществления может вычислять значение оценки плана движения для области на основе числа операций вмешательства водителя или частоты операции вмешательства водителя относительно управления автоматическим вождением в области, а также результата сравнения между целевым значением управления и значением обнаружения результатов управления. Операция вмешательства является операцией, посредством которой управление автоматическим вождением для транспортного средства M прекращается, и вождение транспортного средства M переключается на вождение вручную водителем посредством управления рулем, педалью тормоза и т.п. водителем в ходе управления автоматическим вождением для транспортного средства M. Система 100 автоматического вождения определяет то, что операция вмешательства водителя выполнена, прекращает управление автоматическим вождением и переключает вождение транспортного средства на вождение вручную в случае, если угол поворота руля при рулении, величина нажатия педали тормоза или величина нажатия педали акселератора превышает пороговое значение вмешательства, заданное заранее вследствие водителя в ходе управления автоматическим вождением для транспортного средства M. Технология для прерывания управления автоматическим вождением в ответ на операцию вмешательства водителя известна, и ввиду этого ее подробное описание опускается в данном документе.
[0160] Частота операции вмешательства означает число операций вмешательства в расчете на предварительно определенное расстояние (к примеру, 1 км) или за предварительно определенный период времени (к примеру, 10 минут). Частота операции вмешательства является числом повторений переключения на вождение вручную, получающегося в результате операции вмешательства водителя, инициирования управления автоматическим вождением и переключения на вождение вручную, получающегося в результате операции вмешательства водителя в ходе движения транспортного средства M за предварительно определенное расстояние или в течение предварительно определенного периода времени.
[0161] Модуль 17 вычисления значений оценки вычисляет значение оценки плана движения для области в качестве значения, которое снижается по мере того, как возрастает число операций вмешательства водителя в области (или возрастает частота операции вмешательства). Это обусловлено тем, что вероятность ошибочности картографической информации и противоречивости управления автоматическим вождением относительно намерения водителя повышается по мере того, как возрастает число операций вмешательства водителя в области (или возрастает частота операции вмешательства).
[0162] В дальнейшем в этом документе, описывается случай, в котором операция вмешательства водителя выполняется вследствие ошибки картографической информации, со ссылкой на фиг. 12A и 12B. Фиг. 12A является видом сверху, иллюстрирующим дорогу перед строительными работами, которые вызывают изменение направления движения по полосе движения. Фиг. 12B является видом сверху, иллюстрирующим дорогу после строительных работ, которые вызывают изменение направления движения по полосе движения. Полосы L1-L3 движения и линии W1-W4 дорожной разметки, которые представляют собой граничные линии полос L1-L3 движения, проиллюстрированы на фиг. 12A и 12B. Полоса L1 движения представляет собой крайнюю правую полосу движения дороги при просмотре из транспортного средства M. Полоса L3 движения представляет собой крайнюю левую полосу движения дороги при просмотре из транспортного средства M. Полоса L2 движения представляет собой центральную полосу движения между полосой L1 движения и полосой L2 движения. линия W1 дорожной разметки представляет собой левостороннюю граничную линию полосы L1 движения. линия W2 дорожной разметки представляет собой граничную линию между полосой L1 движения и полосой L2 движения. линия W3 дорожной разметки представляет собой граничную линию между полосой L2 движения и полосой L3 движения. линия W4 дорожной разметки представляет собой правостороннюю граничную линию полосы L3 движения. На фиг. 12A, направление движения полосы L2 движения соответствует направлению, в котором движется транспортное средство M. В этом случае, линия W2 дорожной разметки становится граничной линией полосы движения, и линия W3 дорожной разметки становится средней линией. На фиг. 12B, который показывает дорогу после строительных работ, направление движения полосы L2 движения является противоположным направлению, в котором движется транспортное средство M. В этом случае, линия W2 дорожной разметки становится средней линией, а линия W3 дорожной разметки становится граничной линией полосы движения.
[0163] В данном документе, предполагается, что ситуация дороги перед строительными работами, которая проиллюстрирована на фиг. 12A, сохраняется в качестве картографической информации в картографической базе 4 данных. В этом случае, система 100 автоматического вождения формирует план движения для движения в полосе L2 движения на основе картографической информации картографической базы 4 данных. Система 100 автоматического вождения выполняет управление автоматическим вождением для движения в полосе L2 движения в соответствии с планом движения в случае, если система 100 автоматического вождения не содержит, например, функцию для того, чтобы отличать граничную линию полосы движения от средней линии на основе типа линии для линии дорожной разметки, и не может распознавать то, что полоса L2 движения фактически представляет собой противоположную полосу движения. В это время, водитель распознает ситуацию дороги после строительных работ, которая проиллюстрирована на фиг. 12B, и выполняет операцию вмешательства, так что транспортное средство M не движется в противоположной полосе движения.
[0164] Далее описывается случай, в котором операция вмешательства водителя выполняется вследствие ошибки картографической информации, со ссылкой на фиг. 13A и 13B. Фиг. 13A является видом сверху, иллюстрирующим дорогу до изменения нормативной информации по регулированию скорости. Фиг. 13B является видом сверху, иллюстрирующим дорогу после изменения нормативной информации по регулированию скорости. Знак Ha ограничения скорости, который указывает максимальную разрешенную скорость в 60 км/ч, проиллюстрирован на фиг. 13A. Знак Hb ограничения скорости, который указывает максимальную разрешенную скорость в 50 км/ч, проиллюстрирован на фиг. 13B. Фиг. 13A показывает случай, когда максимальная разрешенная скорость полосы L1 движения, в которой движется транспортное средство M, составляет 60 км/ч без исключения. Фиг. 13B показывает случай, когда присутствует диапазон, в котором максимальная разрешенная скорость составляет 50 км/ч, в полосе L1 движения, перед диапазоном, в котором максимальная разрешенная скорость составляет 60 км/ч.
[0165] В данном документе, предполагается, что данные до изменения нормативной информации по регулированию скорости, которые проиллюстрированы на фиг. 13A, сохраняются в качестве картографической информации в картографической базе 4 данных. В этом случае, система 100 автоматического вождения формирует план движения на основе картографической информации картографической базы 4 данных таким образом, что транспортное средство M имеет максимальную скорость в 60 км/ч или меньше. Система 100 автоматического вождения выполняет управление автоматическим вождением для движения транспортного средства M со скоростью 60 км/ч. В это время, водитель распознает знак Hb ограничения скорости, который указывает максимальную разрешенную скорость в 50 км/ч, и выполняет операцию вмешательства, так что транспортное средство M не движется на 60 км/ч.
[0166] Как описано выше, ненадлежащее управление автоматическим вождением, которое обусловлено ошибкой картографической информации, может выполняться в области, в которой число операций вмешательства водителя является большим, или в области, в которой частота операции вмешательства водителя является высокой. В этом отношении, система 200 определения обновления карт вычисляет значение оценки плана движения на основе числа операций вмешательства водителя или частоты операции вмешательства водителя, а также результата сравнения между целевым значением управления и значением обнаружения результатов управления. Соответственно, система 200 определения обновления карт может определять то, что картографическая информация должна обновляться даже в таких случаях, как случаи, проиллюстрированные на фиг. 12A, 12B, 13A и 13B, и ввиду этого может выполняться более надлежащее определение обновления картографической информации.
[0167] Помимо этого, модуль 17 вычисления значений оценки может вычислять значение оценки плана движения для области на основе числа прерываний управления автоматическим вождением посредством системы 100 автоматического вождения или частоты прерывания. Частота прерывания управления автоматическим вождением посредством системы 100 автоматического вождения означает число прерываний в расчете на предварительно определенное расстояние (к примеру, 1 км) или за предварительно определенный период времени (к примеру, 10 минут). Прерывание управления автоматическим вождением посредством системы 100 автоматического вождения является известной технологией, и ввиду этого ее подробное описание опускается в данном документе.
[0168] Модуль 17 вычисления значений оценки вычисляет значение оценки плана движения для области в качестве значения, которое снижается по мере того, как возрастает число прерываний управления автоматическим вождением в области (или по мере того, как возрастает частота прерывания управления автоматическим вождением).
[0169] Система 100 автоматического вождения прерывает управление автоматическим вождением на основе фактического дорожного окружения. В случае, если фактическая линия дорожной разметки дороги размывается и не может распознаваться, система 100 автоматического вождения прерывает управление автоматическим вождением.
[0170] В случае, если ситуация дороги перед строительными работами, которая проиллюстрирована на фиг. 12A, сохраняется в качестве картографической информации в картографической базе 4 данных, система 100 автоматического вождения формирует план движения на основе картографической информации таким образом, что транспортное средство M движется в полосе L2 движения. В случае, если направление движения по полосе движения может определяться из типа линии для линии дорожной разметки, система 100 автоматического вождения определяет то, что транспортное средство M движется в противоположной полосе движения, на основе типов линий для линии W2 дорожной разметки (средней линии) и линии W3 дорожной разметки (граничной линии полосы движения) в ситуации дороги после строительных работ, которая проиллюстрирована на фиг. 12B, и прерывает управление автоматическим вождением.
[0171] Картографическая информация может быть ошибочной в случае, если прерывание управления автоматическим вождением повторяется посредством системы 100 автоматического вождения. Другими словами, картографическая информация и фактическое дорожное окружение могут отличаться друг от друга вследствие прерывания управления автоматическим вождением на основе фактического дорожного окружения, хотя управление автоматическим вождением инициировано с планом движения в зависимости от картографической информации, сформированной в системе 100 автоматического вождения. В этом отношении, система 200 определения обновления карт вычисляет значение оценки плана движения на основе числа прерываний управления автоматическим вождением посредством системы 100 автоматического вождения или частоты прерывания, а также результата сравнения между целевым значением управления и значением обнаружения результатов управления. Соответственно, система 200 определения обновления карт может определять то, что картографическая информация должна обновляться даже в случае, если фактическая линия дорожной разметки дороги размывается, и ввиду этого может выполняться более надлежащее определение обновления картографической информации. Система 200 определения обновления карт также может вычислять значение оценки плана движения на основе как числа операций вмешательства водителя (или частоты операции вмешательства), так и числа прерываний управления автоматическим вождением посредством системы 100 автоматического вождения (или частоты прерывания).
[0172] Аналогично, модуль 45 вычисления значений оценки согласно второму варианту осуществления может вычислять значение оценки моделированного плана движения посредством использования числа операций вмешательства водителя (или частоты операции вмешательства) и/или числа прерываний управления автоматическим вождением посредством системы 300 автоматического вождения (или частоты прерывания). В этом случае, система 400 определения обновления карт получает информацию, связанную с операцией вмешательства водителя, и информацию, связанную с прерыванием управления автоматическим вождением посредством системы 300 автоматического вождения из транспортного средства M, через модуль 50 связи.
[0173] Пример модификации формирования плана движения (моделированного плана движения)
Картографическая информация также может включать в себя информацию, связанную со средней линией полосы движения, которая представляет собой воображаемую линию, которая соединяет центральные позиции, равноотстоящие от правой и левой линий дорожной разметки полосы движения в направлении ширины полосы движения, между собой. В этом случае, модуль 14 формирования плана движения согласно первому варианту осуществления может формировать план движения на основе информации, связанной со средней линией полосы движения, включенной в картографическую информацию, таким образом, что транспортное средство M движется на средней линии полосы движения. Посредством информации, связанной со средней линией полосы движения, которая представляет собой воображаемую линию, подготовленную заранее, как описано выше, модуль 14 формирования плана движения не должен вычислять центральную позицию полосы движения из информации позиции относительно линии дорожной разметки или бордюра в картографической информации, и ввиду этого может уменьшаться вычислительная нагрузка. Помимо этого, картографическая информация может включать в себя информацию, связанную с предыдущей траекторией движения транспортного средства M. В этом случае, модуль 14 формирования плана движения может формировать план движения на основе информации, связанной с предыдущей траекторией движения транспортного средства M, которая включена в картографическую информацию. Аналогично, модуль 43 формирования моделированного плана движения согласно второму варианту осуществления может формировать план движения на основе информации, связанной со средней линией полосы движения, которая включена в картографическую информацию, или информации, связанной с предыдущей траекторией движения транспортного средства M, которая включена в картографическую информацию.
[0174] Пример модификации задания порогового значения оценки
Модуль 18 определения обновления карт согласно первому варианту осуществления также может задавать пороговое значение оценки по области не на основе позиции области в картографической информации картографической базы 4 данных, а на основе времени движения транспортного средства M в области. В этом случае, модуль 11 распознавания позиций транспортного средства распознает позицию транспортного средства M и время движения транспортного средства M в ассоциации друг с другом из результата измерения посредством приемного GPS-модуля 1. Модуль 18 определения обновления карт распознает время движения транспортного средства M в области на основе позиции транспортного средства M, времени движения транспортного средства M и картографической информации. Модуль 18 определения обновления карт задает пороговое значение оценки для области на основе времени движения транспортного средства M в области.
[0175] Время движения транспортного средства M в области означает промежуточное время между временем, когда транспортное средство M при управлении автоматическим вождением въезжает в область, и временем, когда транспортное средство M выезжает из области. Время, когда транспортное средство M въезжает в область, или время, когда транспортное средство M выезжает из области, также может использоваться в качестве времени движения транспортного средства M в области.
[0176] Модуль 18 определения обновления карт определяет, на основе времени движения транспортного средства M в области, то, представляет время движения собой ночное время или дневное время. Модуль 18 определения обновления карт задает пороговое значение оценки для области, в которой время движения определяется в качестве ночного времени, как ниже порогового значения оценки для области, в которой время движения определяется в качестве дневного времени, так что распознавание линий дорожной разметки посредством использования изображения, захваченного посредством камеры и т.п., имеет более низкий уровень точности, и определение необходимости обновления картографической информации имеет более низкий уровень надежности ночью, чем днем. В случае, если время движения представляет собой "на закате", модуль 18 определения обновления карт может задавать пороговое значение оценки для области, в которой время движения определяется как "на закате", как ниже порогового значения оценки для области, в которой время движения определяется в качестве ночного времени, так что точность распознавания линий дорожной разметки и т.п. может значительно уменьшаться посредством заходящего солнца в этом случае.
[0177] В случае, если, например, транспортное средство M фокусируется больше на результате обнаружения посредством радарного датчика, чем на изображении, захваченном посредством камеры, с точки зрения технических требований, модуль 18 определения обновления карт может задавать пороговое значение оценки для области, в которой время движения определяется в качестве дневного времени, как ниже порогового значения оценки для области, в которой время движения определяется в качестве ночного времени, так что обнаружение посредством радарного датчика может иметь сниженный уровень точности вследствие солнечного света днем. Модуль 18 определения обновления карт также может задавать пороговое значение оценки по области на основе как позиции области в картографической информации картографической базы 4 данных, так и времени движения транспортного средства M в области. Помимо этого, модуль 18 определения обновления карт не обязательно должен задавать пороговое значение оценки для каждой из областей и может приспосабливать постоянное пороговое значение оценки независимо от области вместо этого.
[0178] Примеры модификаций вычисления значения оценки плана движения (моделированного плана движения) и определения необходимости обновления картографической информации
В первом варианте осуществления, модуль 17 вычисления значений оценки не обязательно должен вычислять значение оценки плана движения в качестве значения, большего, когда целевое значение управления плана движения и значение обнаружения результатов управления, получающееся в результате управления автоматическим вождением, соответствуют друг другу. Вместо этого, модуль 17 вычисления значений оценки также может вычислять значение оценки плана движения в качестве значения, меньшего, когда целевое значение управления и значение обнаружения результатов управления соответствуют друг другу. В этом случае, модуль 18 определения обновления карт определяет то, что картографическая информация должна обновляться относительно области, в которой значение оценки плана движения равно или выше порогового значения оценки. Аналогично, во втором варианте осуществления, модуль 45 вычисления значений оценки может вычислять значение оценки моделированного плана движения в качестве значения, меньшего, когда моделированное целевое значение управления моделированного плана движения и значение обнаружения результатов управления, получающееся в результате управления автоматическим вождением, соответствуют друг другу. В этом случае, модуль 46 определения обновления карт определяет то, что картографическая информация должна обновляться относительно области, в которой значение оценки моделированного плана движения равно или выше порогового значения оценки.
[0179] Пример модификации определения необходимости обновления картографической информации
Модуль 17 вычисления значений оценки согласно первому варианту осуществления может выполнять взвешивание (умножение на предварительно определенный весовой коэффициент) для одного или обоих из значения оценки плана движения, связанного со скоростью транспортного средства в области, и значения оценки плана движения, связанного с поперечной позицией в области, и вычислять их сумму в качестве значения оценки плана движения для области. Модуль 17 вычисления значений оценки может выполнять нормализацию (деление на предварительно определенный коэффициент нормализации) для одного или обоих из значения оценки плана движения, связанного со скоростью транспортного средства в области, и значения оценки плана движения, связанного с поперечной позицией в области, и вычислять их сумму в качестве значения оценки плана движения для области.
[0180] Пример модификации управления автоматическим вождением
Управление автоматическим вождением согласно изобретению не обязательно должно представлять собой управление на основе плана движения, которое выполняется относительно как скорости транспортного средства, так и поперечной позиции транспортного средства M. Управление автоматическим вождением также может представлять собой управление, при котором адаптивная система оптимального регулирования скорости (ACC) и автоматическое регулирование поперечной позиции для транспортного средства M, которые основаны на плане движения, комбинируются между собой. ACC означает управление, при котором выполняется управление постоянной скорости для движения на постоянной скорости транспортного средства M на заданной скорости, заданной заранее, в случае, если едущие впереди автомобили не присутствуют перед транспортным средством M, и выполняется следящее управление, так что скорость транспортного средства для транспортного средства M регулируется в соответствии с расстоянием между транспортными средствами относительно едущего впереди автомобиля, в случае, если едущий впереди автомобиль присутствует перед транспортным средством M. В случае, если используется ACC, план движения (план движения в зависимости от картографической информации), связанный со скоростью (или ускорением) транспортного средства для транспортного средства M, не формируется. Автоматическое регулирование поперечной позиции представляет собой управление для регулирования поперечной позиции транспортного средства M на основе плана движения, которая включает в себя поперечную позицию (целевую поперечную позицию) транспортного средства M, которая задается для каждой из заданных продольных позиций на целевом маршруте R. В этом случае, система 200 определения обновления карт согласно первому варианту осуществления определяет необходимость обновления картографической информации в области на основе результата сравнения между целевой поперечной позицией плана движения и поперечной позицией результата управления для результата обнаружения управления. Помимо этого, система 400 определения обновления карт согласно второму варианту осуществления определяет необходимость обновления картографической информации в области на основе результата сравнения между моделированной целевой поперечной позицией моделированного плана движения и поперечной позицией результата управления для результата обнаружения управления.
[0181] Помимо этого, управление автоматическим вождением может представлять собой управление, при котором помощь при рулении, которая зависит от результата датчика, и автоматическое регулирование скорости транспортного средства для транспортного средства M, которое основано на плане движения, комбинируются между собой. Помощь при рулении означает управление поддержкой удержания на полосе движения, предотвращающее отклонение от полосы движения посредством регулирования поперечной позиции транспортного средства M. В случае, если используется помощь при рулении, план движения (план движения в зависимости от картографической информации), связанный с поперечной позицией транспортного средства M (или угол поворота при рулении и т.п.), не формируется. Автоматическое регулирование скорости транспортного средства представляет собой управление для регулирования скорости транспортного средства для транспортного средства M на основе плана движения, который включает в себя скорость транспортного средства (целевую скорость транспортного средства) для транспортного средства M, которая задается для каждой из заданных продольных позиций на целевом маршруте R. В этом случае, система 200 определения обновления карт согласно первому варианту осуществления определяет необходимость обновления картографической информации в области на основе результата сравнения между целевой скоростью транспортного средства плана движения и скоростью транспортного средства результата управления для результата обнаружения управления. Помимо этого, система 400 определения обновления карт согласно второму варианту осуществления определяет необходимость обновления картографической информации в области на основе результата сравнения между моделированной целевой скоростью транспортного средства моделированного плана движения и скоростью транспортного средства результата управления для результата обнаружения управления.
[0182] Сравнительный пример с использованием краткосрочного целевого значения управления краткосрочного плана движения
Система 200 определения обновления карт согласно первому варианту осуществления может вычислять значение оценки плана движения посредством использования краткосрочного целевого значения управления краткосрочного плана движения вместо целевого значения результата управления, получающегося в результате управления автоматическим вождением. В этом случае, модуль 17 вычисления значений оценки вычисляет значение оценки плана движения на основе результата сравнения между целевым значением управления плана движения, которое зависит от картографической информации, и краткосрочным целевым значением управления краткосрочного плана движения, которое реагирует на фактическое дорожное окружение. Модуль 17 вычисления значений оценки вычисляет значение оценки плана движения в качестве значения, которое больше, когда целевое значение управления плана движения и краткосрочное целевое значение управления краткосрочного плана движения соответствуют друг другу. Результат сравнения между целевым значением управления плана движения и краткосрочным целевым значением управления краткосрочного плана движения может быть разностью между целевым значением управления плана движения и краткосрочным целевым значением управления краткосрочного плана движения или соотношением между целевым значением управления плана движения и краткосрочным целевым значением управления краткосрочного плана движения.
[0183] В случае, если дорога в картографической информации является несогласованной с фактическим дорожным окружением, система 200 определения обновления карт может определять необходимость обновления картографической информации посредством использования значения оценки плана движения, вычисленного из результата сравнения между целевым значением управления и краткосрочным целевым значением управления, поскольку, в этом случае, целевое значение управления плана движения, которое зависит от картографической информации, и краткосрочное целевое значение управления краткосрочного плана движения, которое реагирует на фактическое дорожное окружение, отличаются друг от друга.
Реферат
Изобретение относится к области навигационного приборостроения и может быть использовано в системах и устройствах навигации транспортных средств. Технический результат – расширение функциональных возможностей. Для этого система определения обновления карт включает в себя модуль формирования плана движения, формирующий на основе целевого маршрута транспортного средства, заданного заранее, и картографической информации план движения транспортного средства, включающий в себя целевое значение управления для транспортного средства в соответствии с позицией на целевом маршруте, модуль получения значений обнаружения, получающий в ассоциации с позицией на целевом маршруте значение обнаружения результатов управления, получающееся в результате управления автоматическим вождением для транспортного средства, выполняемого на основе дорожного окружения около транспортного средства, ситуации при движении транспортного средства, позиции транспортного средства и плана движения, модуль вычисления значений оценки, вычисляющий значение оценки плана движения для каждой области, и модуль определения обновления карт, определяющий необходимость обновления картографической информации для каждой области. 2 н. и 2 з.п. ф-лы,13 ил.
Комментарии