Система мониторинга технического состояния средств связи и навигационного оборудования - RU2774400C1
Код документа: RU2774400C1
Чертежи






Описание
Изобретение относится к радиотехнике и предназначено для осуществления в режиме реального времени проверок технического состояния берегового и плавучего навигационного и телекоммуникационного оборудования базовых станций (БС) автоматической идентификационной системы (АИС) внутренних водных путей (ВВП) Российской Федерации (РФ), а также портов и прибрежных морских районов, в том числе районов с интенсивным судоходством.
Известна система мониторинга технического состояния наземных средств радиотехнического обеспечения полетов, описанная в «Методических указаниях по летной проверке наземных радиомаяков инструментальной системы посадки аппаратурой летного контроля АЛК-70» (М.: ГосНИИ ГА, 1976. – 9 с.). Система содержит воздушное судно-лабораторию (ВСЛ) и установленные на его борту приемник сигналов курсовых радиомаяков (КРМ), приемник сигналов глиссадных радиомаяков (ГРМ), бортовой приемопередатчик радиодальномера, приемник сигналов маркерных радиомаяков (МРМ), барометрический высотомер, устройство траекторных измерений и регистрирующее устройство.
Недостатком системы является то, что для ее реализации необходимо воздушное судно-лаборатория, что обуславливает большие эксплуатационные затраты системы и снижает оперативность летных проверок наземных объектов.
Известна система для летной проверки азимутальных и дальномерных радионавигационных маяков (РНМ), содержащая ВСЛ, бортовой приемник сигналов азимутального канала РНМ, бортовой приемопередатчик дальномерного РНМ, барометрический высотомер, оптический прибор для определения момента пролета ВСЛ над ориентирами с известными географическими координатами (см. Радиомаяки радиотехнической системы ближней навигации. Методы летных испытаний. ГОСТ 26904-86. ИПК. Издательство стандартов. 1997).
Недостатком системы, как и у предыдущего аналога, является необходимость ВСЛ, что обуславливает большие эксплуатационные затраты на проведение мониторинга, снижает оперативность летных проверок азимутальных и дальномерных радионавигационных маяков, поскольку ВСЛ осуществляет облет наземного радиотехнического оборудования лишь один-два раза в год.
Наиболее близкой по технической сущности к заявленному изобретению (прототипом) является система мониторинга, описанная в пат. РФ № 2501031 МПК G01S7/40, опубл. 10.12.2013. Система состоит из размещаемого на Земле и на борту дистанционно управляемого беспилотного летательного аппарата (БПЛА) контрольного оборудования. Так на борту БПЛА размещаются: приемник сигналов курсового радиомаяка, приемник сигналов глиссадного радиомаяка, приемопередатчик радиодальномера (РДМ), приемник сигналов маркерного радиомаяка, приемник сигналов азимутального канала РНМ, приемопередатчик дальномерного РНМ, барометрический высотомер, передающая видеокамера высокого разрешения, приемник сигналов спутниковой навигационной системы, подключенные к блоку кодирования, соединенного с передающим устройством и УКВ приемопередатчик. На Земле размещаются: блок приема, блок декодирования, пульт оператора, вычислитель, блок траекторных измерений, блок считывания пеленга, автоматический радиопеленгатор и база знаний (БЗ), причем выход блока приема соединен с блоком декодирования, один выход которого подключен к пульту оператора, а второй - к первому входу вычислителя, второй вход которого сопряжен с блоком траекторных измерений, третий вход - с базой данных, четвертый вход - с пультом оператора, а пятый – с блоком считывания пеленга, вход которого присоединен к выходу автоматического радиопеленгатора, при этом выход «Сохранить» вычислителя поступает на вход базы знаний, а ее вход «БЗ» соединен с одноименным выходом пульта оператора.
Недостатками прототипа являются: неполный охват контролируемых наземных объектов; большой объем транслируемой измерительной информации и низкая оперативность проверки из-за того, что на Землю передается весь объем измерительной информации об объектах мониторинга, а не только информация, связанная с их критическим техническим состоянием; отсутствие канала обратной связи «земля-борт» для осуществления контроля настроек (регулировок) аварийного оборудования связи и РТО в режиме реального времени при переходах на резервные комплекты.
Таким образом, техническая проблема, возникающая при использовании системы-прототипа на водных путях, заключается в неполном охвате контролируемых объектов, из-за ограниченных функциональных возможностей беспилотного летательного аппарата, связанных с его невысокой грузоподъемностью, а также в недостаточной оперативности проведения проверок в ближней и дальней зонах действия плавучего и берегового оборудования из-за отсутствия канала обратной связи «берег–борт» для осуществления контроля настроек (регулировок) аварийного оборудования в режиме реального времени в процессе проверки, что замедляет принятие решений по результатам мониторинга.
Техническим результатом, достигаемым с помощью заявляемого изобретения, является расширение перечня контролируемого берегового и плавучего оборудования и повышение оперативности процесса контроля технического состояния объектов мониторинга.
Для достижения указанного результата используется следующая совокупность существенных признаков: в системе мониторинга технического состояния средств связи (СрС) и навигационного оборудования (СНО), содержащей так же как и прототип: береговой автоматизированный измерительный комплекс (АИК), состоящий из блока приема, соединенного с блоком декодирования, один выход которого подключен к пульту оператора, а второй к первому входу вычислителя, второй вход которого сопряжен с блоком траекторных измерений, третий вход с базой знаний, четвертый вход с пультом оператора, а пятый с блоком считывания пеленга, вход которого присоединен к выходу автоматического радиопеленгатора, при этом выход «Сохранить» вычислителя поступает на вход базы знаний, а ее вход «БЗ (база знаний)» соединен с одноименным выходом пульта оператора; размещенный на борту средства мониторинга (СРМ) бортовой АИК, состоящий из блока сменных модулей радиоприемников измерительных сигналов с входящими в него модулем приемопередатчика сигналов дальномерного радионавигационного маяка, модуля приема сигналов азимутального радионавигационного маяка, а также барометрического высотомера, передающей видеокамеры высокого разрешения, приемника сигналов спутниковой навигационной системы, подключенных к блоку кодирования, соединенного с блоком передачи измерительной информации и УКВ приемопередатчика, в отличие от прототипа в качестве СРМ используют дистанционно управляемое безэкипажное водное судно (БЭВС), бортовой АИК которого выполнен с возможностью охвата любых береговых и плавучих СрС и СНО внутренних водных путей Российской Федерации (ВВП РФ), излучающих сигналы в радио- или оптическом диапазоне волн, включая судовые радиостанции и береговые средства связи, стационарные и плавучие (судовые) навигационные огни и навигационное оборудование стационарных и плавучих радиоизлучающих СНО, контрольно-корректирующие станции автономной системы навигации (ККС), базовые станции автоматизированной системы управления движением судов (АСУ ДС) и др., причем каждое СрС и СНО дополнительно оснащено с объектовым комплексом технических средств (КТС) и АИК, сопряженным с АИК администраций бассейнов ВВП, соединенного с базой данных, размещаемых на берегу; в свою очередь, в береговой АИК дополнительно включены: блок дистанционного управления СрС и СНО, группа выходов «ТУ (телеуправления) » которого соединена каналами телеуправления с соответствующими дистанционно управляемыми КТС СрС и СНО, базы данных которых соединены каналами телесигнализации с группой входов «ТС (телесигнализация)» базы знаний берегового АИК, выход «БЗ» которого соединен с одноименным входом пульта оператора, сопряженного через выходы «ТУ СНО» и «ТУ СРМ» соответственно с блоком дистанционного управления СрС и СНО, а также через блок управления БЭВС, и блок кодирования с блоком передачи управляющей информации, излучающий в свободное пространство сигналы телеуправления; а в бортовой АИК дополнительно включены: модули приема сигналов СрС и СНО различных диапазонов волн, выделенных для связи на ВВП РФ и морской подвижной службы (СЧ, ВЧ, ОВЧ, УВЧ, СВЧ), блок контроля, база знаний бортового АИК и блок декодирования, причем все перечисленные модули приема, принимающие радиосигналы от излучающих элементов СрС и СНО, объединены в блок сменных модулей радиоприемников измерительных сигналов, а их выходы поступают на групповой вход «Изм. инф.» блока контроля, который выходом «БЗ» и входом «Эталон» сопряжен с БЗ бортового АИК, а выходом «ТС» и входом «ТУ» соответственно с блоком кодирования и блоком декодирования, второй выход которого соединен с подсистемой управления БЭВС, а вход с УКВ приемопередатчиком, при этом базы знаний бортового и берегового АИК имеют входы/выходы «Актуализация».
Сущность изобретения заключается в возможности дистанционного наблюдения за техническим состоянием береговых и плавучих СрС и СНО, позволяющего в случае их отказа или аварийного состояния принять решение об оперативной замене неработоспособного объекта. При этом система обеспечивает контроль практически за всеми телекоммуникационными и навигационными устройствами, излучающими сигналы в радио- и оптическом диапазонах и расположенными в бассейнах рек (озер) ВВП РФ, акваториях портов, в районах интенсивного движения судов, судоходства в «стесненных» водах фарватеров, каналов, шлюзов, проливов, проходов и пр. Указанный результат достигается за счет использования в качестве средства мониторинга дистанционно управляемого безэкипажного водного судна, обладающего более высокой по сравнению с беспилотным летательным аппаратом грузоподъемностью, вследствие чего оснащенного более совершенным по сравнению с прототипом автоматизированным измерительным комплексом. Одновременно обеспечивается повышение оперативности контроля за счет применения процедуры экспресс-контроля, когда вид технического состояния определяется не по всему перечню контролируемых параметров, предусмотренных нормативно-технической документацией (НТД), а по их ограниченному числу, вносящих наибольший «вклад» в повышение показателя надежности СрС и СНО; за счет применения метода вейвлет-анализа при обработке и хранении измерительной информации, относящегося к методам контроля реального времени; за счет трансляции от бортового АИК в береговой АИК администрации бассейна ВВП не всего объема доступной измерительной информации по каждому объекту мониторинга, а только вида его технического состояния путем формирования соответствующего сигнала.
Сопоставление предлагаемой системы и прототипа показало, что поставленная задача – расширение перечня контролируемых СрС и СНО водных бассейнов и прибрежных морских акваторий и повышение оперативности процесса контроля технического состояния объектов – решается в результате новой совокупности признаков, что доказывает соответствие предлагаемого изобретения критерию патентоспособности «новизна».
В свою очередь, проведенный информационный поиск в области радиосвязи не выявил решений, содержащих отдельные отличительные признаки заявляемого изобретения, что позволяет сделать вывод о соответствии способа критерию «изобретательский уровень».
Сущность указанного изобретения поясняется графическими материалами где:
на фиг. 1 представлена структурная схема системы мониторинга технического состояния средств связи и навигационного оборудования;
на фиг. 2 представлен вариант размещения стационарного и плавучего навигационного и телекоммуникационного оборудования системы связи и СНО на фрагменте зоны ответственности Невско-Ладожского района водных путей и судоходства администрации Волго-Балтийского бассейна;
на фиг. 3 показаны типы безэкипажных водных судов а) и в) среднего класса; б) и г) малого класса;
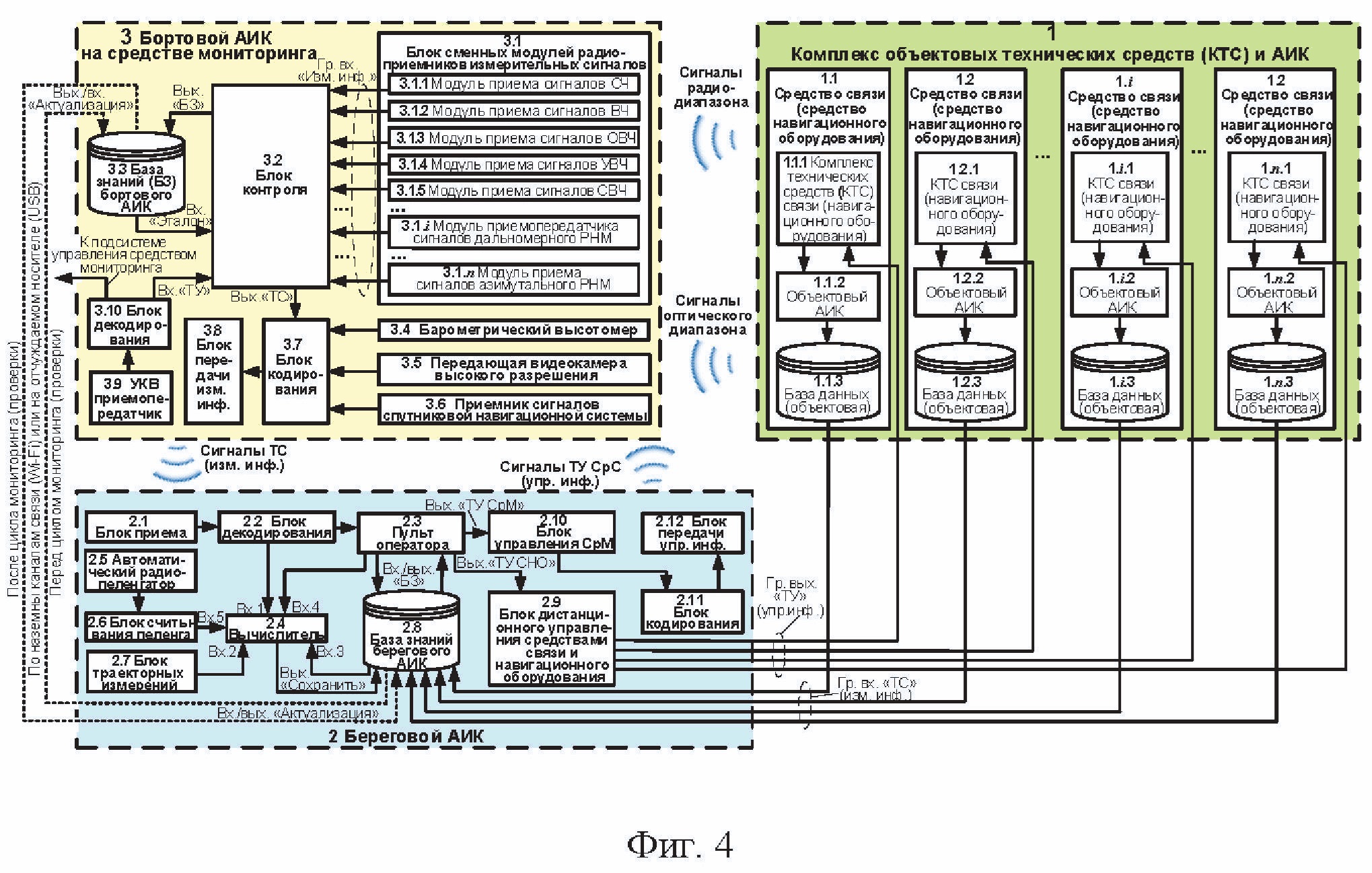
на фиг. 4 приведена функциональная схема системы мониторинга;
на фиг. 5 представлена последовательность применения метода вейвлет-анализа в процедуре экспресс-контроля;
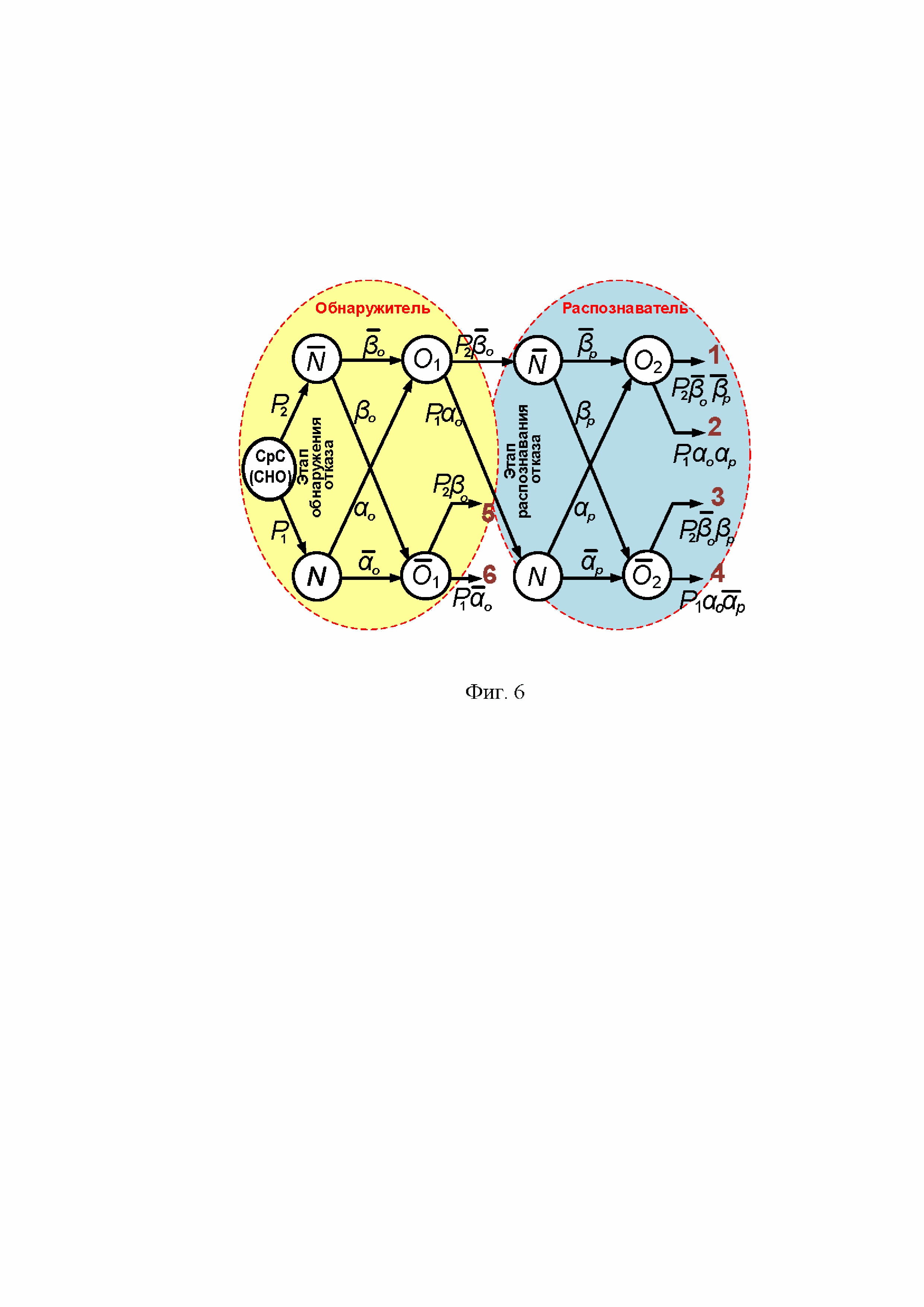
на фиг. 6 показан вероятностный граф определения вида технического состояния СрС и СНО с учетом ошибок первого и второго рода;
на фиг. 7 показан вариант комплектования пульта оператора.
Предлагаемая система состоит из:
комплекса объектовых технических средств (КТС) и АИК – 1 (фиг. 1), установленных на береговых и плавучих СрС и СНО;
берегового АИК – 2, предназначенного для сбора по наземным каналам ТИ-ТС от объектовых АИК СрС и СНО администраций бассейнов ВВП, а также по каналам радиосвязи от бортовых АИК средств мониторинга актуальной измерительной информации, её обработки, регистрации и отображения в интересах СППР руководства группы управления движением судов. Береговой АИК входит в подсистему мониторинга и размещается на ЕЦУ ДС (в районе водных путей и судоходства);
бортового АИК – 3, размещенного на дистанционно управляемом БЭВС и предназначенного для проверок технического состояния СрС и СНО путем дистанционно проводимых измерений параметров излучаемых ими сигналов радио- и оптического диапазонов волн, их обработки, обнаружения факта отказа и идентификации вида технического состояния, а также трансляции измерительной информации на наземный АИК.
Каждый из элементов СрС и СНО в структуре подсистемы мониторинга соединен каналами телеуправления-телесигнализации (ТУ-ТС) с береговым АИК для передачи измерительной информации (сигналы телесигнализации «ТС») в виде величин параметров технического состояния и приема от берегового АИК управляющей информации (сигналов телеуправления «ТУ») в виде команд на включение, выключение, изменение режимов работы (излучения), мощности излучения и пр. Каждое СрС и СНО излучает в свободное пространство соответствующие сигналы радио- либо оптического диапазона волн, принимаемые и анализируемые бортовым АИК на средстве мониторинга. Перечень средств связи и СНО известен из НТД, и приведен в [1]. На фиг. 2 представлен вариант комплексации СрС и СНО на примере Невско-Ладожского района водных путей и судоходства администрации Волго-Балтийского бассейна.
Бортовой АИК средства мониторинга имеет возможность приема сигналов радио- либо оптического диапазона волн, излучаемых подконтрольными СрС и СНО, а также трансляции на береговой АИК сигналов телесигнализации «ТС» (измерительной информации о виде технического состояния объектов мониторинга или величинах их параметров) и приема от берегового АИК сигналов телеуправления «ТУ» (управляющей информации) средством мониторинга в процессе проведения проверки СрС и СНО. Бортовой АИК размещается на дистанционно управляемом БЭВС малого тоннажа. Варианты некоторых типов БЭВС приведены на фиг. 3. Выбор типа судна зависит от его способности нести полезную нагрузку с массо-габаритными характеристиками бортового АИК, укомплектованного необходимым для измерений набором сменных измерительных модулей.
Также бортовой и береговой АИК имеет возможность актуализации своих баз знаний перед началом и после окончания ведения процедуры мониторинга (проверки СрС и СНО) у причала порта с использованием проводных каналов связи или каналов беспроводного доступа (Wi-Fi), а также с применением отчуждаемого носителя (USB-накопителя).
На фиг. 4. показан состав комплекса 1, в который входят объектовые КТС (1.1.1, 1.2.1, …, 1.i.1, … 1.n.1), АИК (1.1.2, 1.2.2, …, 1.i.2, … 1.n.2) и базы данных – (1.1.3, 1.2.3, …, 1.i.3, … 1.n.3) СрС и СНО движения судов, предназначенных для осуществления инструментального управления движением речных судов, захода воздушных судов (летательных аппаратов) на посадку в районе гидродромов, а также на надводные авианесущие корабли с групповым и одиночным базированием воздушных судов (летательных аппаратов, включая беспилотные летательные аппараты).
Назначение и состав каждого объектового КТС в зависимости от категории и применения различно, но их объединяющим признаком является возможность излучения сигналов радио- или оптического диапазона волн, в зависимости от выполняемых функций по управлению движением судов, а также возможности как местного (на объекте или позиции размещения), так и дистанционного управления с ЕЦУ ДС в районах водных путей и судоходства администраций бассейнов ВВП РФ по каналам телеуправления.
Назначение объектового АИК является проведение автоматизированного контроля технического состояния соответствующих КТС связи и навигационного оборудования. Объектовые АИК известны из НТД и входят в состав современных СрС (СНО) нового поколения в качестве подсистемы встроенного контроля, или придаются к наследуемым СрС и СНО старого парка в качестве дополнительного метрологического оборудования, например, в виде автоматизированного программно-аппаратного комплекса контроля и диагностики (АПАК КД) [5], входящего в распределенную подсистему мониторинга ЕЦУ ДС. При этом каждый объектовый АИК сопряжен с подконтрольным КТС каналами телесигнализации для съема измерительной информации, а также с объектовой базой данных для поддержания её в актуальном состоянии.
Назначение объектовой базы данных объектовой является хранение данных об эталонных значениях параметров КТС связи и навигационного оборудования в соответствии с НТД, их эксплуатационных и профилактических допусках, текущих (актуальных) значениях измеренных параметров объектов мониторинга в ходе последней проверки (в том числе о результатах инструментального контроля последнего технического обслуживания), а также выдаче по запросу данной информации в объектовый АИК либо в береговой АИК подсистемы мониторинга ЕЦУ ДС в районах водных путей и судоходства администраций бассейнов ВВП РФ.
Береговой автоматизированный измерительный комплекс – 2 (фиг.4) состоит из:
блока приема 2.1, предназначенного для приема сигналов телесигнализации с измерительной информацией от бортового АИК средства мониторинга в УКВ диапазоне волн. Блок приема известен и описан в [4]. Предполагается, что антенные системы соответствующих диапазонов волн входят в состав блока приема и на фиг. 4 не приведены;
блока декодирования 2.2, предназначенного для декодирования принятых сигналов телесигнализации методами, принятыми в системах радиосвязи. Блок декодирования известен и описан в [4];
пульта оператора 2.3, предназначенного для отображения получаемой измерительной информации от объектовых АИК, входящих в комплекс 1 объектовых технических средств и АИК, а также бортового АИК на средстве мониторинга, управления наземным АИК и движением средства мониторинга в ходе проведения процедуры экспресс-контроля. Пульт оператора может быть представлен автоматизированным рабочим местом (АРМ), например, как показано на фиг. 7;
вычислителя 2.4, предназначенного для определения и прогнозирования вида технического состояния объекта мониторинга на основе выполнения функций сравнения измерительной информации, поступающей из бортового АИК средства мониторинга, объектовых баз данных СрС и СНО и хранящейся в базе знаний берегового АИК. Вычислитель известен из области вычислительной техники и описан в [4];
автоматического радиопеленгатора 2.5 (АРП), предназначенного для пеленгования подвижного средства мониторинга в момент работы передатчиков бортовых радиостанций. АРП известен и описан в [4]. Предполагается, что антенная подсистема входит в состав АРП и на фиг. 4 не показана;
блока считывания пеленга 2.6, предназначенного для сопряжения автоматического радиопеленгатора 2.5 с вычислителем 2.4 берегового АИК. Блок считывания пеленга известен и описан в [4];
блока траекторных измерений 2.7, предназначенного для измерения угловых координат нахождения средства мониторинга (БЭВС) с бортовым АИК в процессе проведения процедуры экспресс-контроля. Блок траекторных измерений известен и описан в [4];
базы знаний берегового АИК 2.8, предназначенной для хранения данных об эталонных значениях параметров КТС связи (СНО) в соответствии с НТД, их эксплуатационных и профилактических допусках, текущих (актуальных) значениях измеренных параметров объекта мониторинга в ходе последней проверки (в том числе результаты инструментального контроля последнего технического обслуживания), значениях величин ошибок контроля (ошибок первого и второго рода) при использовании различных каналов телесигнализации (радио-, проводные, волоконно-оптические), а также алгоритмов процедуры экспресс-контроля и сценариев применения средств мониторинга (маршрутов обхода объектов мониторинга - СрС и СНО). База знаний известна из области информатики, описана в [4] в виде блока памяти;
блока дистанционного управления СрС и СНО 2.9, предназначенного для осуществления дистанционного управления СрС и СНО при их включении, изменении режимов работы (излучения), переходе на резервный полукомплект, выключении, а также передачи им запроса об актуальной измерительной информации по параметрам технического состояния. Блок 2.9 известен для конкретного типа СрС и СНО, описан в [6] и может быть использован, например, в виде семейства аппаратуры «Дистанция», «Дистанция-М» и др.;
блока управления средством мониторинга 2.10, предназначенного для формирования сигналов управления движением средства мониторинга - БЭВС с бортовым АИК для ведения процедур экспресс-контроля. Блок 2.10 известен, используется с определенным типом БЭВС и входит в его состав, например, как описано в [4, 7];
блока кодирования 2.11, предназначенного для кодирования управляющей информации в интересах средства мониторинга методами, принятыми в системах радиосвязи. Блок кодирования известен и описан в [4, 7];
блока передачи управляющей информации 2.12, предназначенного для передачи по каналам телеуправления «ТУ» управляющей информации на борт средства мониторинга в УКВ диапазоне волн. Блок 2.12 известен и описан в [4, 7]. Предполагается, что антенные подсистемы соответствующих диапазонов волн входят в состав блока передачи управляющей информации 2.12 и на фиг. 4 не приведены.
При этом в береговом АИК 2 выход блока приема 2.1 соединен с блоком декодирования 2.2, первый вход которого подключен к одноименному входу вычислителя, а второй – к входу пульта оператора 2.3. К входам вычислителя соответственно присоединены блок траекторных измерений 2.7 (вход 2), пульт оператора 2.3 через базу знаний 2.8 (вход 3) и напрямую (вход 4), а также АРП 2.5 через блок считывания 2.6 (вход 5). Выход вычислителя «Сохранить» поступает на одноименный вход базы знаний 2.8, выход «БЗ» которой сопряжен со входом пульта оператора 2.3, который, в свою очередь, выходом «ТУ СрМ» через блок управления средством мониторинга 2.10 и далее через блок кодирования 2.11 соединен с блоком передачи управляющей информации 2.12 в интересах управления движением средства мониторинга, а выходом «ТУ СНО» с блоком дистанционного управления СрС и СНО 2.9. Данный блок через группу выходов «ТУ» (телеуправление), а база знаний 2.8 через группу входов «ТС» (телесигнализация) соединены соответственно со входами КТС связи или СНО 1.1.1, 1.2.1, …, 1.i.1, … 1.n.1 и выходами объектовых баз данных СрС или СНО 1.1.3, 1.2.3, …, 1.i.3, … 1.n.3.
Бортовой АИК средства мониторинга – 3 состоит (фиг.4) из:
блока сменных модулей радиоприемников измерительных сигналов 3.1, предназначенных для установки на ламелях сменных модулей приема радиосигналов различных диапазонов волн, излучаемых контролируемыми средствами связи и СНО. Блок 3.1 имеет свой конструктив с соответствующими массогабаритными показателями, которые зависят от количества используемых в процедуре мониторинга модулей (плат), соответствующих объему мониторинга и его глубине, что и формирует полезную нагрузку под каждый вид средства мониторинга. Структурно блок 3.1 состоит: из модуля приема сигналов в диапазоне средних частот (СЧ) 3.1.1, модуля приема сигналов в диапазоне высоких частот (ВЧ) 3.1.2, модуля приема сигналов в диапазоне очень высоких частот (ОВЧ) 3.1.3, модуля приема сигналов в диапазоне ультравысоких частот (УВЧ) 3.1.4, модуля приема сигналов в диапазоне сверхвысоких частот (СВЧ) 3.1.5 (данные диапазоны волн, используются в глобальной морской системе связи при бедствиях (ГМССБ) – GMDSS). В состав блока сменных модулей радиоприемников измерительных сигналов 3.1 могут включаться и иные модули радиоприемников измерительных сигналов оборудования СрС и СНО в зависимости от состава системы связи и СНО на конкретных участках в районах водных путей и судоходства администраций бассейнов ВВП РФ, назначения гидродрома, вертолетной площадки на водных судах и его категории и пр. Модули радиоприемников измерительных сигналов 3.1.1, 3.1.2, …, 3.1.i, …, 3.1.n известны из [3, 4, 8], состоят из антенн и плат комплексного технического контроля радиостанций различных диапазонов волн, и могут быть построены на примере структуры аппаратных технического контроля семейства аппаратуры мобильного комплекса технического контроля (МКТК), производства АО «НИИ «Эталон» [9]. Предполагается, что антенные системы разных диапазонов волн входят в состав сменных модулей радиоприемников измерительных сигналов и на фиг. 4 не приведены;
блока контроля 3.2, предназначенного для выполнения функций сравнения измерительной информации в виде сигналов СрС и СНО, полученных от модулей блока сменных модулей радиоприемников измерительных сигналов 3.1 различных диапазонов волн и эталонной информации о радиосигналах, хранящейся в базе знаний бортового АИК 3.3, а также определения вида технического состояния объектов контроля по результатам этого сравнения. Блок контроля известен и описан, например, в виде автоматизированного программно-аппаратного комплекса контроля и диагностики (АПАК КД) [5];
базы знаний бортового АИК 3.3, предназначенной для хранения данных об эталонных значениях параметров, контролируемых СрС и СНО, в соответствии с НТД, их эксплуатационных и профилактических допусках, актуальных значениях измеренных параметров объектов контроля в ходе предыдущей проверки (в том числе результатах инструментального контроля последнего технического обслуживания и ремонта), значениях величин ошибок контроля первого и второго рода, а также алгоритмах технологии ведения экспресс-контроля. База знаний известна из области информатики и описана в [4] в виде блока памяти;
барометрического высотомера 3.4, предназначенного для вычисления высоты над уровнем моря при проведении измерений на системе шлюзов судоходных каналов в процессе управления средством мониторинга оператором. Он относится к навигационному прибору, известен и описан в [2, 4, 7, 8];
передающей видеокамеры высокого разрешения 3.5, предназначенной для ведения видеосъемки элементов навигационных огней СНО в районах водных путей и судоходства администраций бассейнов ВВП РФ днем и ночью. Камеры такого типа известны, широко применяются на безэкипажном транспорте и описаны в [2, 4, 7, 8];
приемника сигналов спутниковой навигационной системы 3.6, предназначенного для приема сигналов спутниковой навигации (СНС) при управлении оператором средством мониторинга. Такие приемники известны, широко применяются в авиации, морском и речном флоте, в том числе и на БЭВС, описаны в [2, 4, 7, 8]. Предполагается, что антенная подсистема входит в состав приемника сигналов СНС 3.6 и на фиг. 4 не представлена;
блока кодирования 3.7, предназначенного для кодирования измерительной информации методами, принятыми в системах радиосвязи. Он известен и описан в [4];
блока передачи измерительной информации 3.8, предназначенного для передачи ИИ от бортового АИК на средстве мониторинга в интересах берегового АИК. Блок 3.8 известен в виде УКВ радиопередатчика и описан в [5]. Предполагается, что антенная подсистема входит в состав блока 3.8 и на фиг. 4 не представлена;
УКВ приемопередатчика 3.9, предназначенного для приема управляющей информации от берегового АИК в интересах как бортового АИК, так и управления движением средства мониторинга, а также для излучения сигналов в диапазоне работы АРП. УКВ приемопередатчик известен и описан в [5]. Предполагается, что антенная подсистема входит в его состав и на фиг. 4 не представлена;
блока декодирования 3.10, предназначенного для декодирования принятых от берегового АИК сигналов телеуправления средством мониторинга методами, принятыми в системах радиосвязи. Блок 3.10 известен и описан в [4].
При этом выходы модулей 3.1.1, 3.1.2, …, 3.1.i, …, 3.1.n блока сменных модулей приемников измерительных сигналов 3.1, соединены посредствам группы входов «Изм. инф.» (измерительная информация) с блоком контроля 3.2, выход «БЗ» (База знаний) и вход «Эталон» которого поступают на одноименные вход и выход базы знаний бортового АИК 3.3, а выход «ТС» – на вход блока кодирования 3.7, другие входы которого подключены к барометрическому высотомеру 3.4, передающей видеокамере высокого разрешения 3.5 и приемнику сигналов спутниковой навигационной системы 3.6. В свою очередь, выход блока кодирования 3.7 соединен с блоком передачи измерительной информации 3.8, а выходы УКВ приемопередатчика 3.9 поступают на вход блока декодирования 3.10 первый и второй выходы которого подключены соответственно ко входу «ТУ» блока контроля 3.2 и ко входу подсистемы управления средством мониторинга (на фиг. 4 не показана). Причем база знаний 3.3 бортового АИК на средстве мониторинга и база знаний 2.8 берегового АИК снабжены входами/выходами «Актуализация», которые предназначены для поддержания в актуальном состоянии данных о техническом состоянии контролируемых СрС и СНО посредством их синхронизации с результатами текущей и предыдущих проверок и инструментального контроля в процессе технических обслуживаний и ремонта объектов мониторинга.
Заявляемая система работает в четырех режимах:
в режиме подготовки к проведению мониторинга;
в режиме обнаружения отказа (предотказного состояния);
в режиме распознавания отказа и идентификации места отказа;
в режиме обработки результатов мониторинга и подготовки отчетов.
Режим подготовки к проведению мониторинга осуществляется на берегу перед началом проверки. При этом в береговом АИК 2 ЕЦУ ДС в районах водных путей и судоходства администраций бассейнов ВВП РФ посредством пульта оператора 2.3 актуализируют условия проведения мониторинга путем оценки обстановки проведения мониторинга (время года, суток, осадки, облачность, ветер, балльность волнения водной поверхности, внешние воздействия и иные дестабилизирующие факторы). Из выбранной зоны мониторинга путем внесения (записи) географических координат точек размещения средств навигационного оборудования и средств связи через вход «БЗ» в базу знаний 2.8, определяют: объем мониторинга в виде подвергаемых проверке средств связи и СНО, глубину мониторинга в виде числовых значений их параметров, доступных дистанционному контролю, точность мониторинга в виде назначенных эксплуатационных допусков на параметры в соответствии с НТД и профилактических допусков, рассчитанных при проведении предыдущей процедуры технического обслуживания или ремонта. Порядок назначения эксплуатационных допусков и определения профилактических допусков на выбранные для процедуры дистанционного экспресс-контроля параметры функционирования СрС и СНО изложен в [10, 11]. Причем актуальная измерительная информация о техническом состоянии СрС и СНО поступает в базу знаний 2.8 берегового АИК из объектовых баз данных 1.1.3, 1.2.3, …, 1.i.3, …, 1.n.3 СрС и СНО 1 через групповой вход «ТС». Далее, используя базу знаний 2.8 берегового АИК устанавливают необходимую достоверность мониторинга в виде значений ошибок контроля (ошибок первого и второго рода) в соответствии с различными условиями проведения процедуры мониторинга. Исходя из заданных объема и глубины мониторинга база знаний 2.8 формирует отчет по необходимой полезной нагрузке бортового АИК в виде перечня сменных модулей приемников измерительной информации 3.1.1, 3.1.2, 3.1.3, 3.1.4, …, 3.1.i, …, 3.1.n бортового АИК 3 на средстве мониторинга. С учетом массогабаритных показателей сформированной полезной нагрузки бортового АИК база знаний 2.8 берегового АИК формирует рекомендации по выбору вида средства мониторинга. С учетом оценки обстановки, состава контролируемых средств связи и СНО, перечня их контролируемых параметров, а также вида средства мониторинга и технологии проведения измерений в процессе мониторинга [2-4, 7, 12] с использованием геоинформационной системы (ГИС) планируют маршрут обхода элементов системы связи и СНО, а также точек проведения измерений на нем. После укомплектования бортового АИК сменными измерительными модулями и подготовки средства мониторинга к проведению процедуры мониторинга на причале БЭВС через выход «Актуализация» базы знаний 2.8 берегового АИК и одноименный вход базы знаний 3.3 бортового АИК средства мониторинга осуществляют актуализацию данных, сформированных в базе знаний 2.8 берегового АИК при выполнении режима подготовки к проведению мониторинга, обеспечивая режим реального времени.
Режим обнаружения отказа (предотказного состояния) осуществляется системой мониторинга технического состояния средств связи и навигационного оборудования в ходе процедуры мониторинга путем их обхода БЭВС в соответствии с маршрутом движения. При этом излучаемые СрС и СНО 1.1, 1.2, …, 1.i, …, 1.n (фиг. 4) сигналы радиодиапазона принимаются модулями приема сигналов 3.1.1, 3.1.2, 3.1.3, 3.1.4, …, 3.1.i, …, 3.1.n блока сменных модулей приемников измерительных сигналов 3.1 различных диапазонов, а оптическое излучение навигационных огней СНО – передающей видеокамерой высокого разрешения 3.5. С выходов модулей приема сигналов радиодиапазона 3.1.1, 3.1.2, 3.1.3, 3.1.4, …, 3.1.i, …, 3.1.n текущая информация измеренных параметров СрС и СНО поступает посредствам группового входа «Изм. инф.» в блок контроля 3.2, где по его запросу через выход «БЗ» из базы знаний 3.5 бортового АИК на другой вход «Эталон» поступают эталонные значениям параметров подконтрольных СрС и СНО для сравнения и определения их вида технического состояния. Причем сравнение текущего и эталонного значений контролируемых параметров СрС и СНО происходит с учетом как эксплуатационных допусков, предусмотренных НТД на объекты контроля, так и профилактических допусков [10, 11], рассчитанных в ходе режима подготовки в береговом АИК 2 по результатам предыдущего технического обслуживания и актуализированных с базой знаний бортового АИК перед текущей проверкой. Для повышения оперативности проведения экспресс-контроля в ходе мониторинга и сокращения объемов хранящейся в базах знаний и передаваемой из бортового АИК 3 в береговой АИК 2 измерительной информации процедура сравнения текущего и эталонного значений параметров в блоке контроля 3.2 осуществляется с использованием вейвлет-коэффициентов методами вейвлет-анализа [13, 14]. Последовательность применения метода вейвлет-анализа в процедуре экспресс-контроля состояния СрС и СНО представлена на фиг. 5. В результате обработки и сравнения текущих и эталонных значений параметров контролируемых СрС и СНО в блоке контроля 3.2 определяют вид технического состояния объекта мониторинга в соответствии с вероятностным графом, показанном на фиг. 6. Из блока контроля 3.2 вид технического состояния подконтрольного СрС (СНО) через выход «БЗ» сохраняется в базе знаний 3.5 бортового АИК и через выход «ТС» поступает в блок кодирования 3.7, на другие входы которого поступает информация от барометрического высотомера 3.4, передающей видеокамеры высокого разрешения 3.5 и приемника сигналов СНС для фиксации точки проведения замера параметра. После кодирования данная информация поступает в блок передачи измерительной информации 3.8 и излучается в свободное пространство в береговой АИК. При этом в ходе мониторинга, если блоком контроля 3.2 в соответствии с вероятностным графом определения вида технического состояния, показанного на фиг. 6, определено состояние СрС (СНО) по классу «5» (система работоспособна, признана работоспособной) и по классу «4» (система отказала, отказ обнаружен и распознан) то на береговой АИК транслируется не вся доступная экспресс-контролю измерительная информация, а только формализованный сигнал «Норма» (класс «5») или «Авария» (класс «4»). В некоторых специальных случаях по запросу оператора подсистемы мониторинга ЕЦУ ДС для разгрузки каналов радиосвязи, формализованный сигнал «Норма» может также не излучаться в свободное пространство. И только если блок контроля 3.2 определил отказ или предотказное состояние контролируемых СрС и СНО в береговой АИК будет транслироваться формализованный сигнал о нарушении их работоспособности, либо по запросу оператора подсистемы мониторинга ЕЦУ ДС будет транслироваться вся доступная бортовому АИК измерительная информация по данному объекту мониторинга.
Режим распознавания отказа и идентификации места отказа осуществляется системой мониторинга технического состояния средств связи и навигационного оборудования в береговом АИК 2 (фиг. 4) с учетом измерительной информации, поступающей из бортового АИК 3 и объектовых АИК СрС и СНО района водных путей и судоходства администраций бассейнов ВВП РФ. При этом сигналы телесигнализации в виде формализованной измерительной информации, излучаемые в свободное пространство блоком передачи измерительной информации 3.8 бортового АИК 3 средства мониторинга поступают в береговой АИК 2 на вход блока приема 2.1, декодируются в блоке декодирования 2.2 методами, принятыми в системах радиосвязи, и далее передаются на пульт оператора 2.3 и на первый вход вычислителя 2.4. В вычислителе происходит этап распознавания отказа (предотказного состояния) контролируемого средства связи (СНО), а также прогнозирования вида технического состояния объекта контроля на основе выполнения функций сравнения измерительной информации, с одной стороны поступающей на первый его вход из бортового АИК 3 средства мониторинга через блоки 2.1 и 2.2, на второй вход от блока траекторных измерений 2.7 местоположения средства мониторинга, на пятый вход от блока считывания пеленга 2.6, получающего измерительную информацию от автоматического радиопеленгатора 2.5, работающего синхронно с УКВ приемопередатчиком 3.9 бортового АИК средства мониторинга, а с другой стороны измерительной информации, поступающей через третий вход от базы знаний 2.8 берегового АИК с актуальными значениями параметров подконтрольных СрС (СНО) 1.1, 1.2, …, 1.i, …, 1.n района водных путей и судоходства администраций бассейнов ВВП РФ. Синхронность выполнения функций сравнения значений СрС и СНО в вычислителе 2.4, а также сохранение результатов сравнения и отображение вида технического состояния объекта мониторинга обеспечивается с использованием пульта оператора 2.3 через вход/выход «БЗ» сопряженного с базой знаний 2.8 и через четвертый вход с вычислителем 2.4, а также посредствам его третьего входа и выхода «Сохранить», сопряженных с базой знаний 2.8 берегового АИК 2. Процедуры проведения мониторинга каждого в отдельности средства связи или СНО, а также порядок обработки измерительной информации на берегу подробно описаны в методиках проверок в прототипе [2-4]. Обеспечение же режима реального времени предложенным устройством мониторинга технического состояния средств связи и навигационного оборудования СрС и СНО при актуализации измерительной информации по объектам контроля на текущий момент времени в ходе проверки осуществляется также с пульта оператора 2.3 через выход «ТУ СНО», используемого для включения блока дистанционного управления СрС и СНО 2.9 при телеуправлении посредствам группы выходов «ТУ» подконтрольными КТС связи (СНО) 1.1.1, 1.2.1, …, 1.i.1, …, 1.n.1 блока 1 района водных путей и судоходства администраций бассейнов ВВП РФ. При этом в случае выдачи вычислителем 2.4 вида технического состояния, отличного от работоспособного, осуществляется перевод подконтрольного средства связи (СНО) на резервный полукомплект автоматически либо в ручном режиме по запросу с пульта оператора. Вариант автоматического или ручного включения резерва описан в [15]. После перевода аварийного средства связи или СНО на резервный полукомплект также через пульт оператора 2.3, блок дистанционного управления средствами связи и навигационного оборудования 2.9 и группу выходов «ТУ» управляющая информация поступает на комплекс технических средств связи (СНО) 1.1.1, 1.2.1, …, 1.i.1, …, 1.n.1 блока 1 с запросом на проведение инструментального контроля отказавшего СрС (СНО) объектовым АИК 1.1.2, 1.2.2, …, 1.i.2, …, 1.n.2. Полученная в ходе инструментального контроля аварийного полукомплекта КТС связи (СНО) измерительная информация сохраняется в объектовой базе данных 1.1.3, 1.2.3, …, 1.i.3, …, 1.n.3, с выхода которой поступает на групповой вход «ТС» базы знаний 2.8 берегового АИК и через вход/выход «БЗ» отображается на пульте оператора 2.3. В зависимости от результатов инструментального контроля оператором подсистемы мониторинга (СППР) принимается решение на проведение необходимых регулировок в аварийном КТС связи (СНО), например, повышение излучаемой мощности, корректировка ориентации излучающей антенны, проведение других регулировок или полная замена отказавших блоков, плат и типовых элементов замены (ТЭЗ) из состава одиночного (ЗИП-О) или группового (ЗИП-Г) комплекта запасных частей и принадлежностей на СрС (СНО). В случае осуществления необходимых регулировок выходных параметров аварийного СрС (СНО) или текущего ремонта с использованием ТЭЗ из состава ЗИП-О (ЗИП-Г) в течение длящейся проверки с пульта оператора 2.3 через выход «ТУ» в блок управления средством мониторинга 2.10 поступает команда на изменение его маршрута движения при процедуре мониторинга с повторным обходом аварийного СрС (СНО) после выполненных регулировок (текущего ремонта). Данная команда в формализованном виде кодируется блоком кодирования 2.11 методами, принятыми в системах радиосвязи, и через блок передачи управляющей информации 2.12 излучается в свободное пространство в виде сигналов «ТУ», которые принимаются УКВ приемопередатчиком 3.9 бортового АИК на средстве мониторинга и далее через блок декодирования 3.10 поступают к подсистеме управления БЭВС (на фиг. 4 не показана), а также через вход «ТУ» в блок контроля 3.2 бортового АИК для включения программы повторной процедуры экспресс-контроля (проверки) заданного СрС (СНО). Далее работа устройства осуществляется в режиме обнаружения отказа.
Режим обработки результатов мониторинга и подготовки различных видов отчетов и протоколов измерений осуществляется на берегу по окончании проверки. При этом после швартовки судна с бортовым АИК 3 к причалу БЭВС с использованием наземных каналов связи (Wi-Fi) либо на отчуждаемом носителе (USB-накопителе) через выход «Актуализация» базы знаний 3.3 бортового АИК средства мониторинга и одноименный вход базы знаний 2.8 берегового АИК осуществляют её актуализацию с целью сохранения не только вида технического состояния аварийных СрС и СНО, но и всей доступной измерительной информации по каждому объекту мониторинга в ходе проведенной проверки, обеспечивая режим мягкого реального времени. По сохраненной в базе знаний 2.8 берегового АИК измерительной информации с пульта оператора 2.3 через вход/выход «БЗ» корректируют исходные данные для последующих проверок по программе режима подготовки к проведению мониторинга. Данная измерительная информация также важна для её использования в имитационных моделях подсистемы мониторинга ЕЦУ ДС района водных путей и судоходства администраций бассейнов ВВП РФ [12]. Также режим обработки результатов мониторинга завершается печатью протоколов проверки.
Заявленная система может быть применена:
при вводе средств связи и СНО в эксплуатацию;
при периодических плановых поверках СрС и СНО и в ходе их технического обслуживания (инструментальном контроле);
при внеплановых поверках СрС и СНО, связанных с замечаниями (жалобами) капитанов судов на некорректное функционирование СНО, а также при воздействиях на систему связи и СНО искусственного и естественного характера (техногенных катастроф, ураганов и пр.);
при разработке и испытаниях новых образцов средств связи и СНО, систем посадки и радионавигационных систем для пилотируемой и беспилотной авиации наземного и морского базирования;
при выполнении научно-исследовательских работ в области совершенствования средств связи и СНО и повышения их эффективности функционирования;
при повышении квалификации специалистов речного и морского флота.
Предлагаемое изобретение было создано специалистами кафедры судоходства на внутренних водных путях и научного центра ФГБОУ ВО «Государственный университет морского и речного флота имени адмирала С.О. Макарова» в составе научно-исследовательской работы. Были произведены экспериментальные исследования и расчеты, показавшие возможность использования заявляемой системы для мониторинга технического состояния берегового и плавучего навигационного и телекоммуникационного оборудования внутренних водных путей Российской Федерации, а также в портах и прибрежных морских районах, в том числе в районах с интенсивным судоходством.
Изложенное позволяет сделать вывод о соответствии изобретения критерию «промышленная применимость».
Источники информации:
1. ГОСТ 26600-98 Знаки навигационные внутренних судоходных путей. Общие технические условия. ИПК. Издательство стандартов. 1998.
2. Методические указания по летной проверке наземных радиомаяков инструментальной системы посадки аппаратурой летного контроля АЛК-70. – М.: ГосНИИ ГА, 1976. – 9 с.
3. Радиомаяки радиотехнической системы ближней навигации. Методы летных испытаний. ГОСТ 26904-86. ИПК. Издательство стандартов. 1997.
4. Войтович Н.И., Жданов Б.В. Способ летных проверок наземных средств радиотехнического обеспечения полетов и устройства для его применения // Патент на изобретение RU 2501031 С2, опубл. 10.12.2013, бюл. № 34.
5. Кузнецов С.В., Винограденко А.М. Модель единой централизованной системы управления техническим состоянием вооружения военной и специальной техники // Наукоемкие технологии в космических исследованиях Земли. 2018. Т. 10. № 4. С. 48-54. doi: 10.24411/2409-5419-2018-10096.
6. Николашин Ю.Л., Винокур М.В. Развитие системы управления в корабельных комплексах связи. Этапы развития и пути совершенствования // Техника средств связи. 2020. № 1. С. 2-13.
7. Ананьев А.В., Гончаренко В.И., Лютин В.И. Построение системы автоматического наведения беспилотных летательных аппаратов с применением комплексирования результатов наблюдения цели различными датчиками // Труды Военно-космической академии имени А.Ф. Можайского. 2019. № 666. С. 47-57.
8. Раев А.А., Вороник В.И., Кононенко А.В., Кузнецов М.М. Использование беспилотных летательных аппаратов при оценке характеристик ЗРС // Вестник воздушно-космической обороны. 2017. № 2 (14). С. 45-48.
9. Цимбал В.А., Будко П.А., Рачков В.Е., Шлаев Д.В. Увеличение зон радиообмена с использованием пакетных данных // Известия института инженерной физики. 2006. № 2. С. 35-37.
10. Абрамов О.В. Планирование профилактических коррекций параметров технических устройств и систем // Информатика и системы управления. 2017. № 3 (53). С. 55-66.
11. Федоренко В.В., Будко П.А. Расчет эксплуатационных допусков на параметры каналообразующей аппаратуры // Известия высших учебных заведений. Радиоэлектроника. 2000. Т. 43. № 3-4. С. 55-60.
12. Яшин А.И., Будко П.А., Винограденко А.М., Педан А.В. Имитационное моделирование автоматизированной системы контроля технического состояния элементов распределенных радиоцентров // Морская радиоэлектроника. 2018. № 1 (63). С. 32-37.
13. Kotenko I.V., Budko P.A., Vinogradenko A.M., Saenko I.B.An Approach for Intelligent Evaluation of the State of Complex Autonomous Objects Based on the Wavelet Analysis // The 18th International conference on intelligent software methodologies, tools and techniques (SOMET'2019). Kuching, Sarawak, Malaysia, 23-25 September 2019. С. 25-38. doi: 10.3233/FAIA190036.
14. Будко П.А., Жуков Г.А., Винограденко А.М., Гойденко В.К. Определение аварийного состояния морского робототехнического комплекса по многоэтапной процедуре контроля на основе использования вейвлет-преобразований // Морская радиоэлектроника. 2016. № 4 (58). С. 18-23.
15. Аллакин В.В., Будко Н.П. Идентификация состояния узлов информационно-телекоммуникационных сетей общего пользования подсистемой мониторинга информационной безопасности // Техника средств связи. 2020. № 3 (151) С. 58-64.
Реферат
Изобретение относится к радиотехнике и предназначено для осуществления в режиме реального времени проверок технического состояния берегового и плавучего навигационного и телекоммуникационного оборудования базовых станций (БС) автоматической идентификационной системы (АИС) внутренних водных путей (ВВП) Российской Федерации (РФ), а также портов и прибрежных морских районов, в том числе районов с интенсивным судоходством. Техническим результатом является расширение перечня контролируемого берегового и плавучего оборудования и повышения оперативности процесса контроля технического состояния объектов мониторинга. Упомянутый технический результат достигается за счет использования в качестве средства мониторинга дистанционно управляемого безэкипажного водного судна, обладающего более высокой по сравнению с беспилотным летательным аппаратом грузоподъемностью, вследствие чего оснащенного более совершенным автоматизированным измерительным комплексом; за счет применения процедуры экспресс-контроля, когда вид технического состояния определяется не по всему перечню контролируемых параметров, предусмотренных нормативно-технической документацией (НТД), а по их ограниченному числу; за счет применения метода вейвлет-анализа при обработке и хранении измерительной информации, относящегося к методам контроля реального времени; за счет трансляции от бортового АИК в береговой АИК администрации бассейна ВВП не всего объема доступной измерительной информации по каждому объекту мониторинга, а только вида его технического состояния путем формирования соответствующего сигнала. 7 ил.
Формула
Документы, цитированные в отчёте о поиске
Информационная система мониторинга и обнаружения событий между транспортными средствами либо между транспортными средствами и стационарными, плавучими или наземными объектами и комплексами с помощью удаленного наблюдения
Система точной навигации подвижных объектов с использованием данных наземной инфраструктуры глонасс
Комментарии