Надежный и достоверный способ, устройство и система для измерения скорости в реальном времени и непрерывного определения положения - RU2730442C1
Код документа: RU2730442C1
Чертежи



















Описание
По настоящей заявке испрашивается приоритет на основании заявки на патент Китая № 201710096583.6, озаглавленной “SAFE AND RELIABLE METHOD, DEVICE, AND SYSTEM FOR REAL-TIME SPEED MEASUREMENT AND CONTINUOUS POSITIONING”, поданной 22 февраля 2017 года в Патентное ведомство Китая, которая включена в материалы настоящей заявки путём ссылки в полном объёме.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области железнодорожного транспорта и, в частности, к способу, устройству и системе для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения.
УРОВЕНЬ ТЕХНИКИ
С быстрым развитием технологий, относящихся к железнодорожному транспорту, высокоскоростные поезда стали обыденным выбором для передвижения в повседневной жизни людей. Традиционные высокоскоростные поезда способны передвигаться на скорости вплоть до 300 км/ч. Однако, дальше повышать скорость поездов затруднительно вследствие сцепления колес/рельсов и других факторов. В данной области техники общепризнано, что сверхвысокоскоростные поезда, передвигающиеся на скорости более 400 км/ч, могут быть реализованы, полагаясь исключительно на технологию магнитной левитации.
Что касается традиционного поезда на магнитной подушке, скорость поезда на магнитной подушке измеряется с помощью индукционного статорного полюса, а положение поезда на магнитной подушке определяется с помощью индукционного кодового датчика положения. Скорость поезда на магнитной подушке измеряется с помощью индукционного статорного полюса следующим образом, при котором статорные полюсы размещены вдоль рельса с определенным интервалом по расстоянию, и скорость измеряется с помощью источников сигнала индукционного статорного полюса. Низкая скорость измеряется на основании переднего фронта и заднего фронта сигнала, а высокая скорость измеряется подсчетом принятых импульсов. положение поезда на магнитной подушке определяется следующим образом, при котором источники сигнала индукционного кодового датчика положения размещены вдоль рельса с определенным интервалом по расстоянию, чтобы выполнять определение абсолютного положения поезда, а определение относительного положения выполняется на участке между двумя индукционными кодовыми датчиками положения на основании интегрирования набранных скоростей, обнаруживаемых с помощью индукционных статорных полюсов.
Исследованиями обнаружено, что информация о скорости и информация о положении, полученная приведенным выше образом, является прерывистой во времени, оказывается неспособной добиваться измерения скорости в реальном времени и непрерывного определения положения, таким образом, оказываясь неспособной удовлетворять требование к измерению скорости в реальном времени и непрерывному определению положения применительно к сверхвысокоскоростному поезду на магнитной подушке. Кроме того, как только возникает неисправность в статорном полюсе, измерение скорости выполняться не может. Подобным образом, как только возникает неисправность в индукционном кодовом датчике положения, не может выполняться и определение положения.
Поэтому задача, подлежащая решению специалистами в данной области техники, состоит в создании способа, устройства и системы для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Предусмотрен способ надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению. С помощью этого способа измерение скорости в реальном времени и непрерывное определение положения могут выполняться надежно и достоверно на основании данных коррекции и данных инерциальной навигации в случае, если данные коррекции обнаружены, и даже в случае, если данные коррекции не обнаружены, измерение скорости в реальном времени и непрерывное определение положения также могут надежно и достоверно выполняться на основании данных инерциальной навигации, что ведет к высокой стабильности, надежности и точности. Согласно настоящему изобретению, дополнительно предусмотрены устройство для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения, а также система для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения, которая включает в себя устройство.
Для решения приведенной выше технической задачи предусмотрен способ надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению, который включает в себя:
обнаружение данных инерциальной навигации из источника сигнала инерциальной навигации, размещенного в поезде, и обнаружение данных коррекции из источника сигнала коррекции, при этом источник сигнала коррекции содержит источник спутникового сигнала, размещенный в поезде, а данные коррекции содержат спутниковые данные; и
определение, в случае, если данные коррекции не обнаружены, текущей скорости и текущего положения поезда на основании данных инерциальной навигации, и коррекцию, в случае, если данные коррекции обнаружены, данных инерциальной навигации с использованием данных коррекции, и определение текущей скорости и текущего положения поезда на основании скорректированных данных инерциальной навигации.
Предпочтительно, способ дополнительно включает в себя: передачу текущей скорости и текущего положения.
Предпочтительно, данные коррекции дополнительно содержат: данные скорости из источника полюсного статорного сигнала, размещенного на рельсе для поезда; и/или данные положения с индукционного кодового датчика положения, размещенного на рельсе для поезда.
В случае, если спутниковые данные не обнаружены, коррекция данных инерциальной навигации с использованием данных коррекции, включает в себя: коррекцию данных скорости в данных инерциальной навигации с использованием данных скорости из источника полюсного статорного сигнала; и/или коррекцию данных положения в данных инерциальной навигации с использованием данных положения от индукционного кодового датчика положения. В случае, если спутниковые данные обнаружены, коррекция данных инерциальной навигации с использованием данных коррекции, включает в себя: коррекцию данных скорости в данных инерциальной навигации с использованием данных скорости из источника статорного полюсного сигнала и спутниковых данных; и/или коррекцию данных положения в данных инерциальной навигации с использованием данных положения от индукционного кодового датчика положения и из спутниковых данных.
Предпочтительно, коррекция данных скорости в данных инерциальной навигации с использованием данных скорости из источника статорного полюсного сигнала и спутниковых данных, включает в себя: коррекцию с заданным временным интервалом коррекции данных скорости в данных инерциальной навигации с использованием скорректированной скорости в качестве начальной скорости, в ходе коррекции данных текущей скорости, при этом скорректированная скорость получается на основании текущей скорости по спутниковому сигналу и текущей скорости по полюсному сигналу.
Предпочтительно, коррекция данных положения в данных инерциальной навигации с использованием данных положения от индукционного кодового датчика положения и из спутниковых данных, включает в себя: коррекцию, с заданным временным интервалом коррекции, данных положения в данных инерциальной навигации с использованием скорректированного положения в качестве начального положения, в ходе коррекции данных текущего положения, при этом скорректированное положение получается на основании текущего положения по спутниковому сигналу и текущего положения по индукционному кодовому датчику положения.
Предпочтительно, количество источников статорного полюсного сигнала имеет значение больше одного, и более одного источников статорного полюсного сигнала выполнены с возможностью формирования структуры обеспечения надежности парой из двух двоек; и/или количество индукционных кодовых датчиков положения имеет значение больше одного, и более одного индукционных кодовых датчиков положения выполнены с возможностью формирования структуры обеспечения надежности парой из двух двоек.
Предпочтительно, количество источников сигнала инерциальной навигации имеет значение больше одного, и более одного источников сигнала инерциальной навигации выполнены с возможностью формирования структуры обеспечения надежности выбором двух из трех; и количество источников спутникового сигнала имеет значение больше одного, и более одного источников спутникового сигнала выполнены с возможностью формирования структуры обеспечения надежности выбором двух из трех.
Предпочтительно, алгоритмом обеспечения надежности, перенятым в структуре обеспечения надежности выбором двух из трех, является основанный на методе калмановской фильтрации алгоритм обеспечения надежности слиянием данных из множества источников для выполнения измерения скорости и определения положения или основанный на методе итерационной коррекции алгоритм обеспечения надежности слиянием данных из множества источников для выполнения измерения скорости и определения положения.
Предпочтительно, количество источников сигнала инерциальной навигации имеет значение четыре, и количество источников спутникового сигнала имеет значение четыре.
Предпочтительно, четыре источника спутникового сигнала реализованы соответственно микропроцессорным набором для спутников BeiDou, микропроцессорным набором для спутников GPS, микропроцессорным набором для спутников GLONASS и микропроцессорным набором для спутников Galileo.
Для того чтобы решить приведенную выше техническую задачу, согласно настоящему изобретению, дополнительно предусмотрено устройство для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения. Устройство включает в себя процессор сигнала инерциальной навигации, процессор сигнала коррекции и процессор слияния данных. Процессор сигнала инерциальной навигации выполнен с возможностью обнаружения данных инерциальной навигации из источника сигнала инерциальной навигации, размещенного в поезде. Процессор сигнала коррекции выполнен с возможностью обнаружения данных коррекции из источника сигнала коррекции. Источник сигнала коррекции включает в себя источник спутникового сигнала, размещенный в поезде. Данные коррекции включают в себя спутниковые данные. Процессор сигнала коррекции включает в себя процессор спутникового сигнала. Процессор слияния данных выполнен с возможностью определения, в случае, если данные коррекции не обнаружены, текущей скорости и текущего положения поезда на основании данных инерциальной навигации, и коррекции, в случае, если данные коррекции обнаружены, данные инерциальной навигации, с использованием данных коррекции, и определения текущей скорости и текущего положения поезда на основании скорректированных данных инерциальной навигации.
Предпочтительно, процессор сигнала коррекции дополнительно включает в себя процессор внешнего сигнала.
В случае, если спутниковые данные не обнаружены, процессор слияния данных дополнительно выполнен с возможностью коррекции данных инерциальной навигации с использованием данных коррекции, на следующих этапах: коррекции данных скорости в данных инерциальной навигации с использованием данных скорости из источника статорного полюсного сигнала; и/или коррекции данных положения в данных инерциальной навигации с использованием данных положения с индукционного кодового датчика положения. В случае, если спутниковые данные обнаружены, процессор слияния данных дополнительно выполнен с возможностью коррекции данных инерциальной навигации с использованием данных коррекции, на следующих этапах: коррекции данных скорости в данных инерциальной навигации с использованием данных скорости из источника статорного полюсного сигнала и спутниковых данных; и/или коррекции данных положения в данных инерциальной навигации с использованием данных положения от индукционного кодового датчика положения и из спутниковых данных.
Предпочтительно, устройство дополнительно включает в себя процессор связи, который выполнен с возможностью передачи текущей скорости и текущего положения.
Для решения приведенной выше технической задачи, согласно настоящему изобретению дополнительно предусмотрена система для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения. Система включает в себя источник сигнала инерциальной навигации, источник сигнала коррекции и описанное выше устройство для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения.
Предпочтительно, количество источников сигнала инерциальной навигации имеет значение больше одного, и более одного источников сигнала инерциальной навигации выполнены с возможностью формирования структуры обеспечения надежности выбором двух из трех; и количество источников спутникового сигнала имеет значение больше одного, и более одного источников спутникового сигнала выполнены с возможностью формирования структуры обеспечения надежности выбором двух из трех.
Предпочтительно, количество источников сигнала инерциальной навигации имеет значение четыре, и количество источников спутникового сигнала имеет значение четыре.
Предпочтительно, четыре источника спутникового сигнала реализованы соответственно микропроцессорным набором для спутников BeiDou, микропроцессорным набором для спутников GPS, микропроцессорным набором для спутников GLONASS и микропроцессорным набором для спутников Galileo.
Предусмотрены способ, устройство и система для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению. Способ для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения включает в себя: обнаружение данных инерциальной навигации из источника сигнала инерциальной навигации, размещенного в поезде, и обнаружение данных коррекции из источника сигнала коррекции, при этом источник сигнала коррекции включает в себя источник спутникового сигнала, размещенный в поезде, а данные коррекции включают в себя спутниковые данные; и определение, в случае, если данные коррекции не обнаружены, текущей скорости и текущего положения поезда на основании данных инерциальной навигации, и коррекцию, в случае, если данные коррекции обнаружены, данных инерциальной навигации с использованием данных коррекции, и определение текущей скорости и текущего положения поезда на основании скорректированных данных инерциальной навигации.
Из настоящего изобретения может быть видно, что обнаруживаются как данные инерциальной навигации, так и данные коррекции, а образ действия для получения текущей скорости и текущего положения поезда определяется с учётом данных инерциальной навигации в качестве исходных данных, в зависимости от результата обнаружения данных коррекции. В случае, если данные коррекции обнаружены, измерение скорости в реальном времени и непрерывное определение положения могут выполняться надежно и достоверно на основании данных коррекции и данных инерциальной навигации. Даже в случае, если данные коррекции не обнаружены, измерение скорости в реальном времени и непрерывное определение положения могут выполняться надежно и достоверно на основании данных инерциальной навигации. Таким образом, могут достигаться высокие стабильность, надежность и точность.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для того чтобы понятнее описать техническое решение в вариантах осуществления настоящего изобретения или техническое решение в традиционной технологии, в дальнейшем кратко описаны чертежи, подлежащие использованию в ходе описания вариантов осуществления настоящего изобретения или традиционной технологии. Очевидно, что чертежи, описанные ниже, всего лишь показывают варианты осуществления настоящего изобретения, и специалисты в данной области техники могут получить другие чертежи согласно приведенным чертежам без каких бы то ни было творческих усилий.
Фиг. 1 - принципиальная схема, показывающая принцип для выполнения измерения скорости в реальном времени согласно настоящему изобретению;
фиг. 2 - принципиальная схема, показывающая принцип для выполнения непрерывного определения положения согласно настоящему изобретению;
фиг. 3 - блок-схема последовательности операций способа для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению;
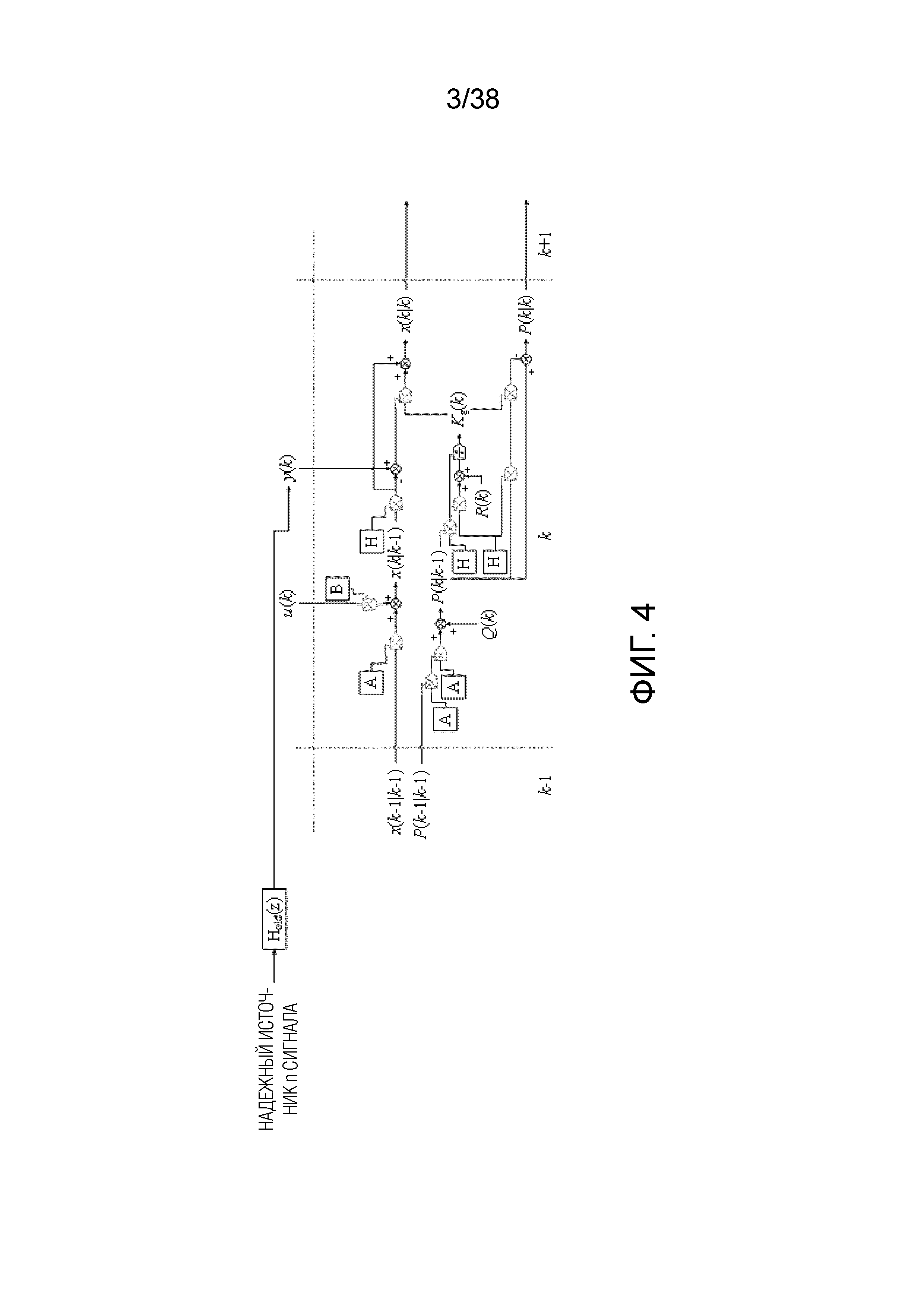
фиг. 4 - принципиальная схема, показывающая принцип основанного на методе калмановской фильтрации алгоритма обеспечения надежности слиянием данных из множества источников для выполнения измерения скорости и определения положения согласно настоящему изобретению;
фиг. 5 - принципиальная схема, показывающая принцип основанного на методе итерационной коррекции алгоритма обеспечения надежности слиянием данных из множества источников для выполнения измерения скорости и определения положения согласно настоящему изобретению;
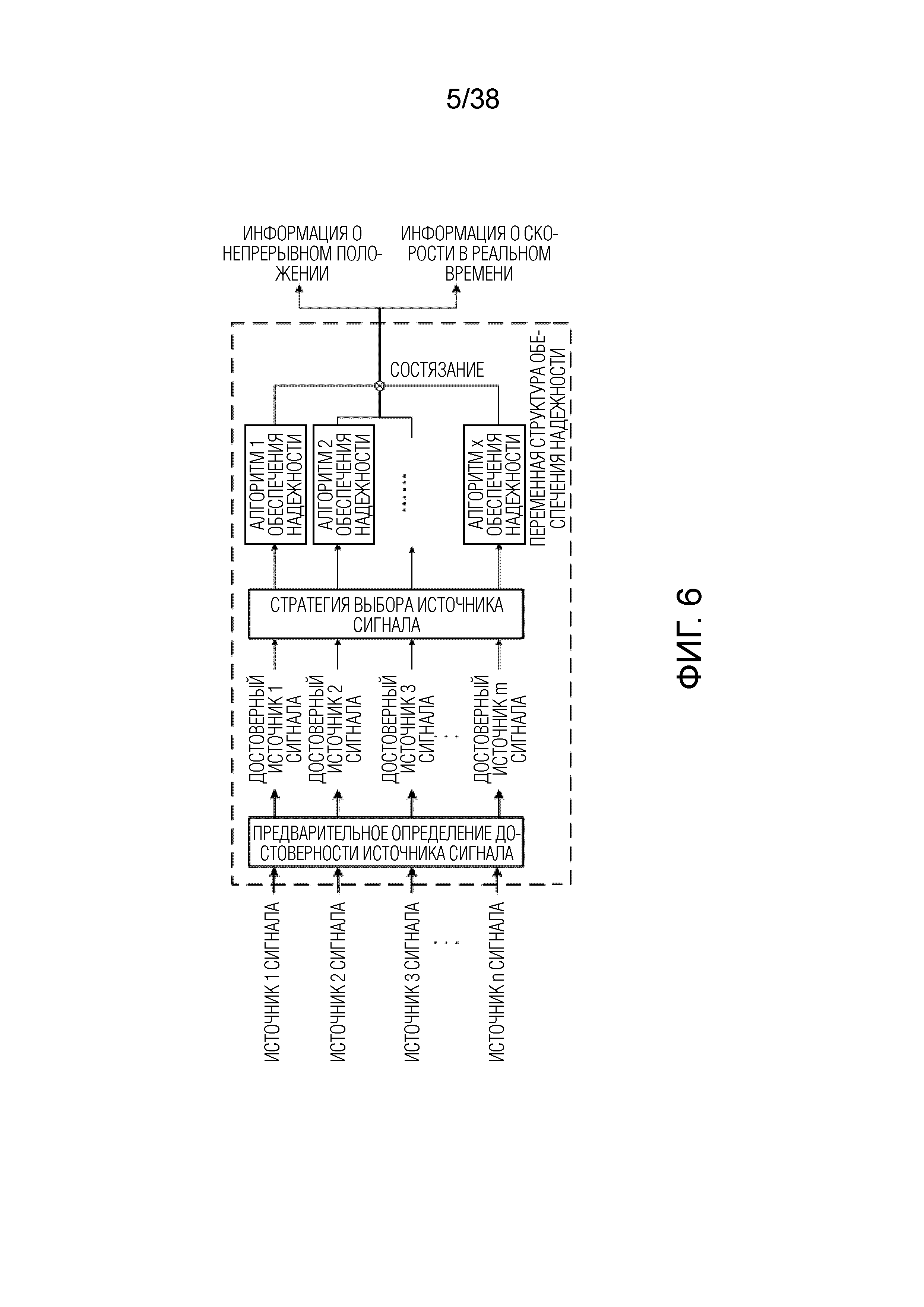
фиг. 6 - принципиальная блок-схема, показывающая принцип для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению;
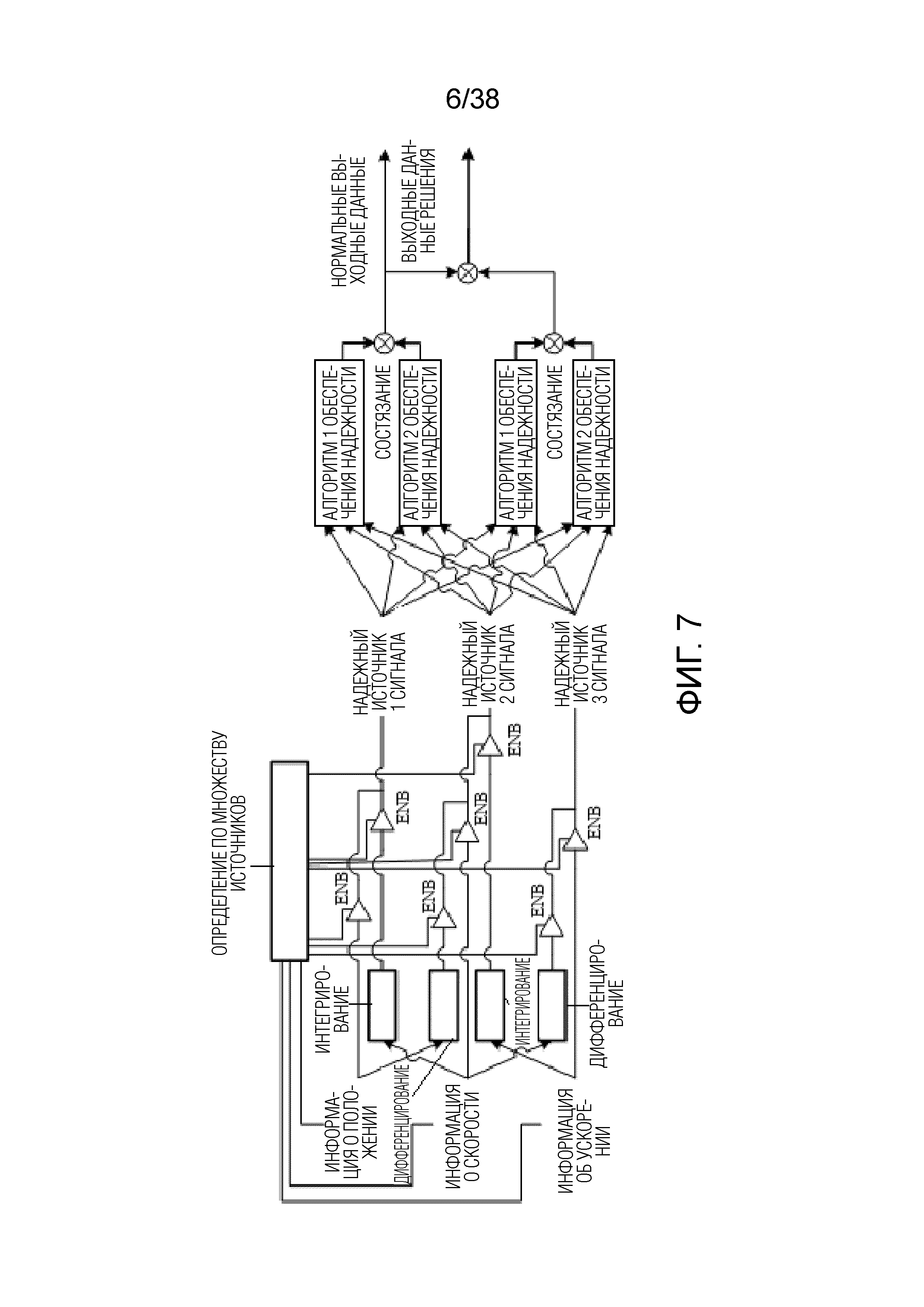
фиг. 7 - принципиальная схема структуры обеспечения надежности парой из двух двоек с множеством источников, основанной на информации о положении, информации о скорости и информации об ускорении, согласно настоящему изобретению;
фиг. 8 - принципиальная схема структуры обеспечения надежности выбором двух из трех с множеством источников, основанной на информации о положении, информации о скорости и информации об ускорении, согласно настоящему изобретению;
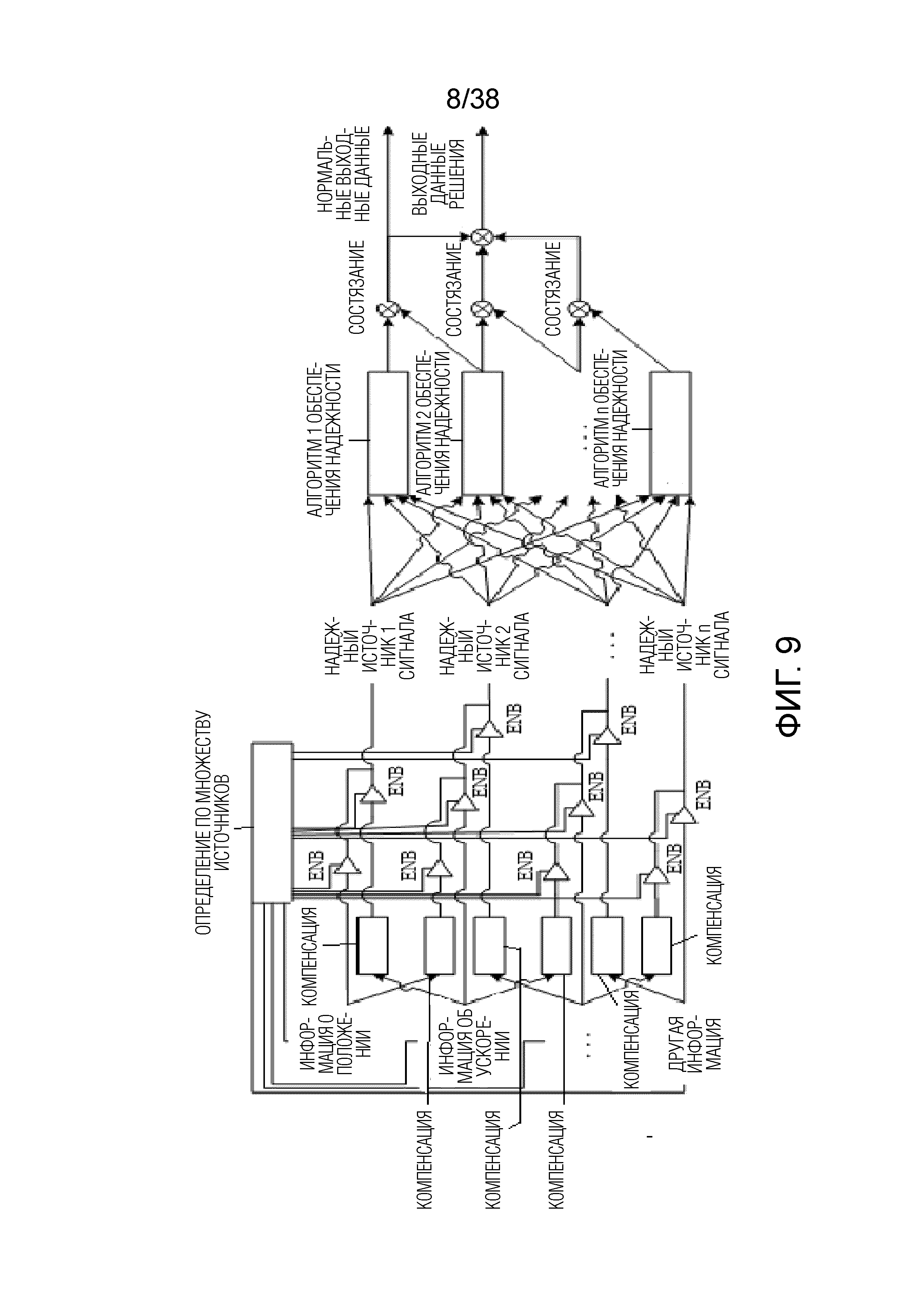
фиг. 9 - принципиальная схема структуры обеспечения надежности выбором двух из множества с множеством источников, основанной на информации о положении, информации о скорости и информации об ускорении, согласно настоящему изобретению;
фиг. 10 - принципиальная схема структуры обеспечения надежности множественного выбора с множеством источников, основанной на информации о положении, информации о скорости и информации об ускорении, согласно настоящему изобретению;
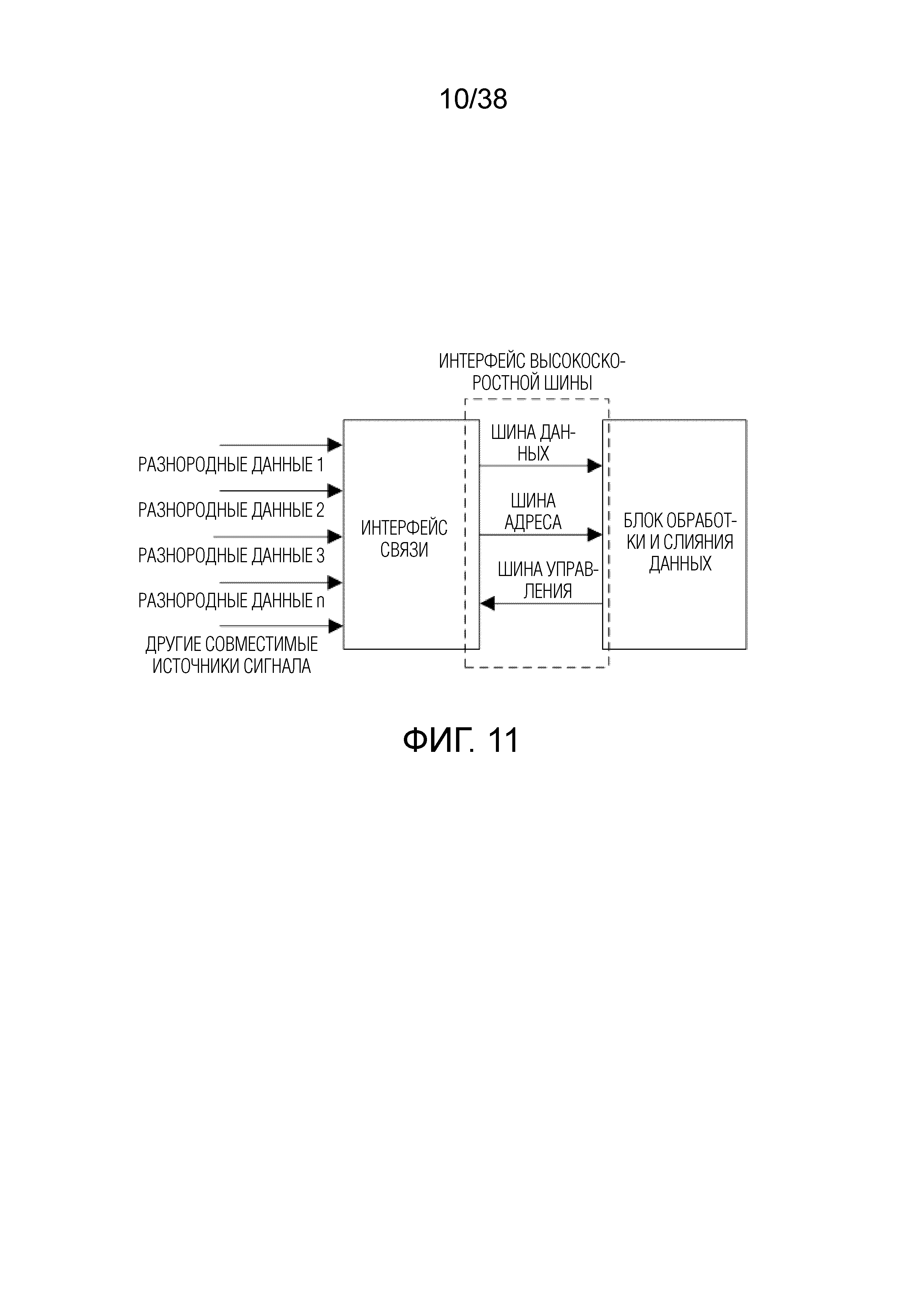
фиг. 11 - принципиальная структурная схема блока слияния и обработки данных, поддерживающего быстрое расширение, согласно настоящему изобретению;
фиг. 12 - принципиальная схема, показывающая принцип метода интеграции информации тесно связанного множества источников, основанного на источнике сигнала инерциальной навигации, согласно настоящему изобретению;
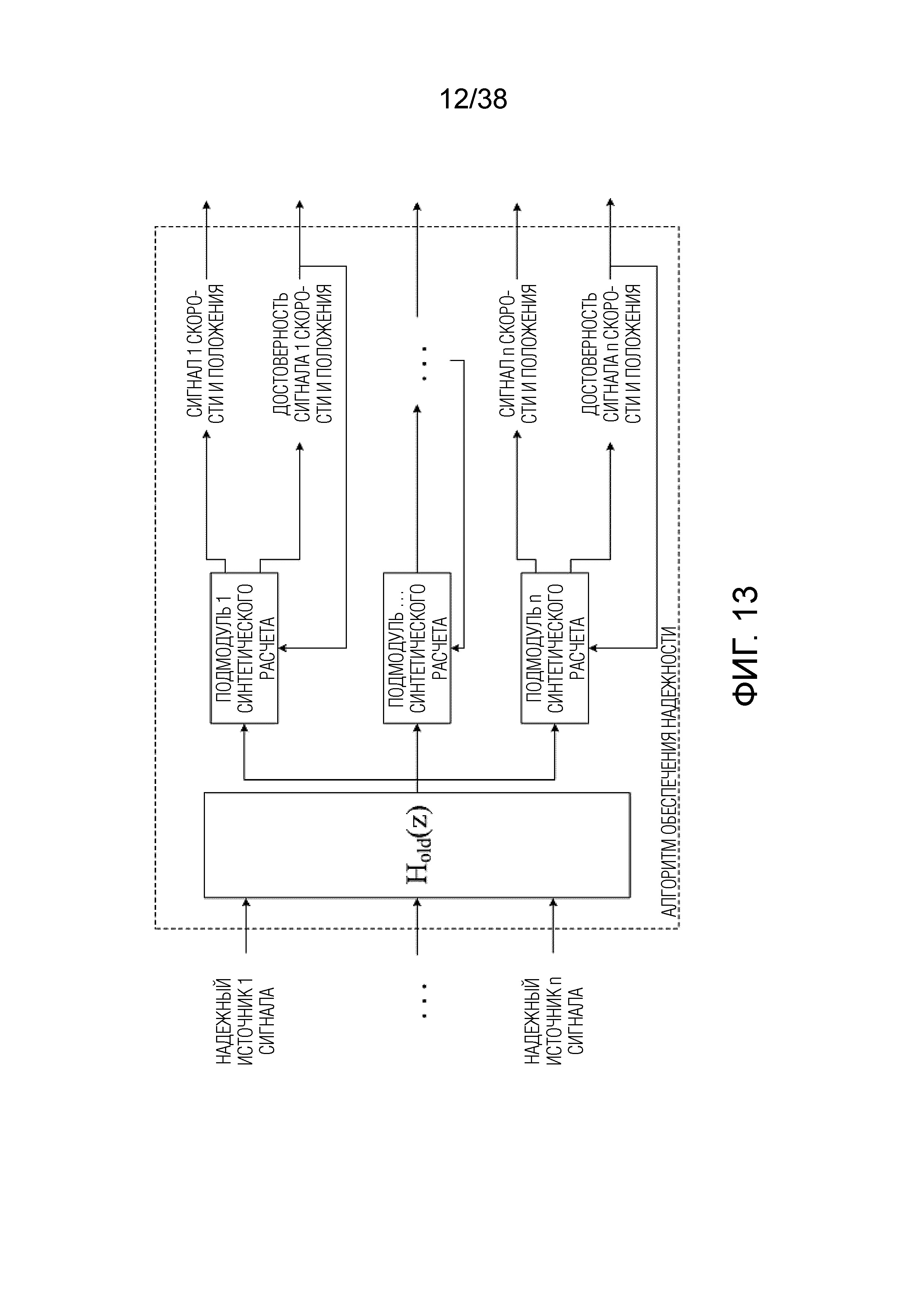
фиг. 13 - принципиальная схема, показывающая инфраструктуру алгоритма обеспечения надежности согласно настоящему изобретению;
фиг. 14 - принципиальная схема, показывающая принцип алгоритма целочисленной неопределенности, основанного на методе наименьших квадратов с быстрой итерационной сходимостью, согласно настоящему изобретению;
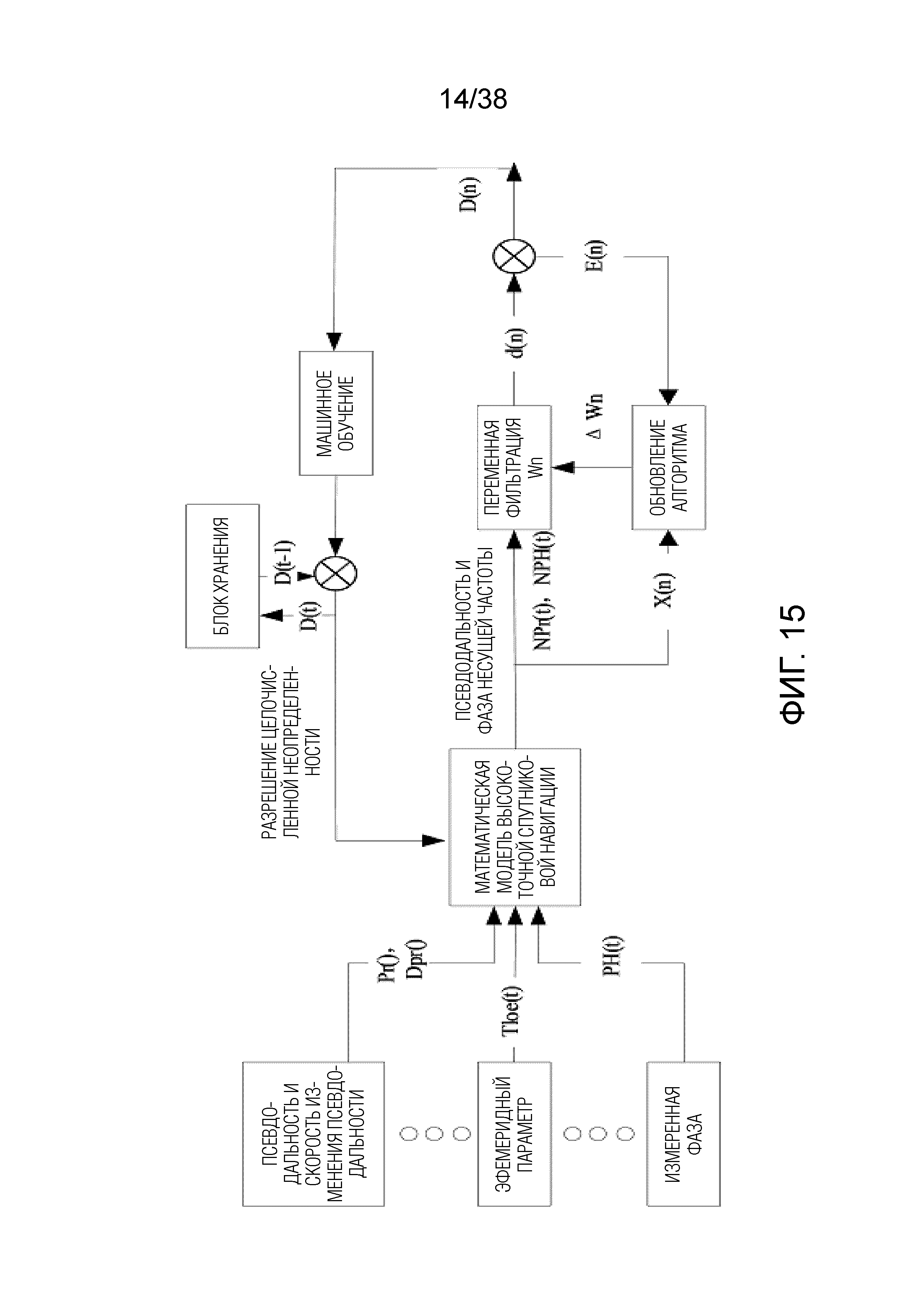
фиг. 15 - принципиальная схема, показывающая принцип алгоритма целочисленной неопределенности, основанного на методе машинного обучения, согласно настоящему изобретению;
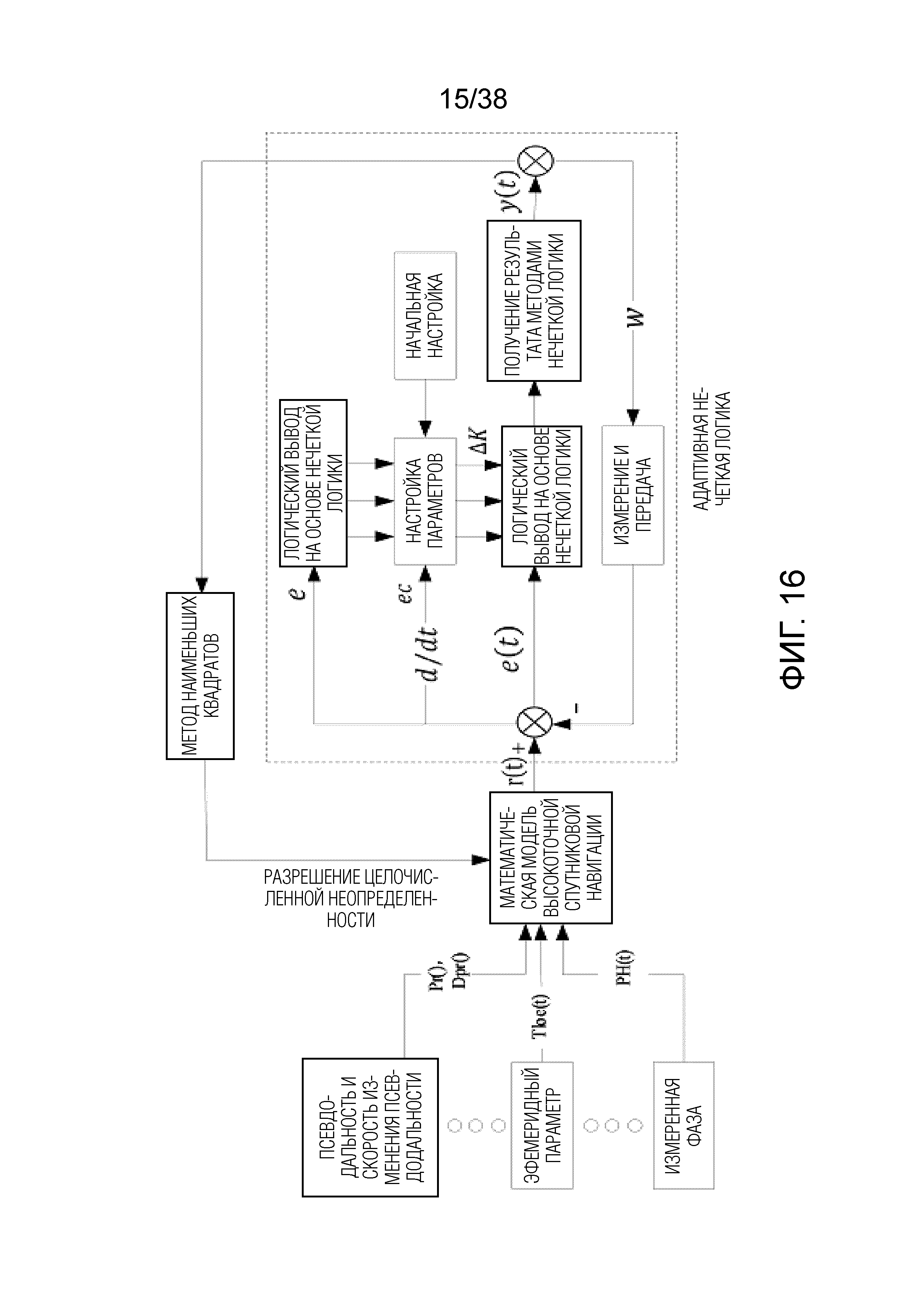
фиг. 16 - принципиальная схема, показывающая принцип алгоритма целочисленной неопределенности, основанного на методе адаптивной неопределенности, согласно настоящему изобретению;
фиг. 17 - принципиальная схема, показывающая принцип способа оценки параметров, основанного на улучшенном генетическом алгоритме малой окрестности, согласно настоящему изобретению;
фиг. 18 - принципиальная схема, показывающая принцип способа оценки параметров, основанного на улучшенном гибридном квантовом генетическом алгоритме, согласно настоящему изобретению;
фиг. 19 - принципиальная схема, показывающая принцип способа оценки параметров, основанного на алгоритме дуального разложения с применением комплексного вейвлет-преобразования, согласно настоящему изобретению;
фиг. 20 - принципиальная схема, показывающая принцип способа контроля данных и анализа ошибок, основанного на нечетком алгоритме, согласно настоящему изобретению;
фиг. 21 - принципиальная схема, показывающая принцип алгоритма прогнозирования в реальном времени, основанного на модели в нейронной сети, согласно настоящему изобретению;
фиг. 22 - принципиальная схема, показывающая принцип алгоритма слияния информации о положении в реальном времени, основанного на улучшенном методе калмановской фильтрации, согласно настоящему изобретению;
фиг. 23 - принципиальная схема, показывающая принцип алгоритма слияния данных, основанного на методе фильтрации частиц, согласно настоящему изобретению;
фиг. 24 - принципиальная схема, показывающая принцип алгоритма квартерионного разрешения определения положения со слиянием данных, основанного на параметрическом методе Родригеса, согласно настоящему изобретению;
фиг. 25 - принципиальная схема, показывающая улучшенную структуру обеспечения надежности обработки информации о скорости, согласно настоящему изобретению;
фиг. 26 - принципиальная схема, показывающая еще одну улучшенную структуру обеспечения надежности обработки информации о скорости, согласно настоящему изобретению;
фиг. 27 - принципиальная схема, показывающая улучшенную структуру обеспечения надежности обработки информации о положении, согласно настоящему изобретению;
фиг. 28 - принципиальная схема, показывающая еще одну улучшенную структуру обеспечения надежности обработки информации о положении, согласно настоящему изобретению;
фиг. 29 - принципиальная схема, показывающая улучшенную структуру обработки информации о скорости и информации об ускорении, согласно настоящему изобретению;
фиг. 30 - принципиальная схема, показывающая улучшенную структуру обеспечения надежности получения информации о положении, основанную на алгоритме обеспечения надежности, согласно настоящему изобретению;
фиг. 31 - принципиальная структурная схема, показывающая устройство для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению;
фиг. 32 - принципиальная схема, показывающая принцип для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения, основанного на двенадцати источниках сигналов, согласно настоящему изобретению;
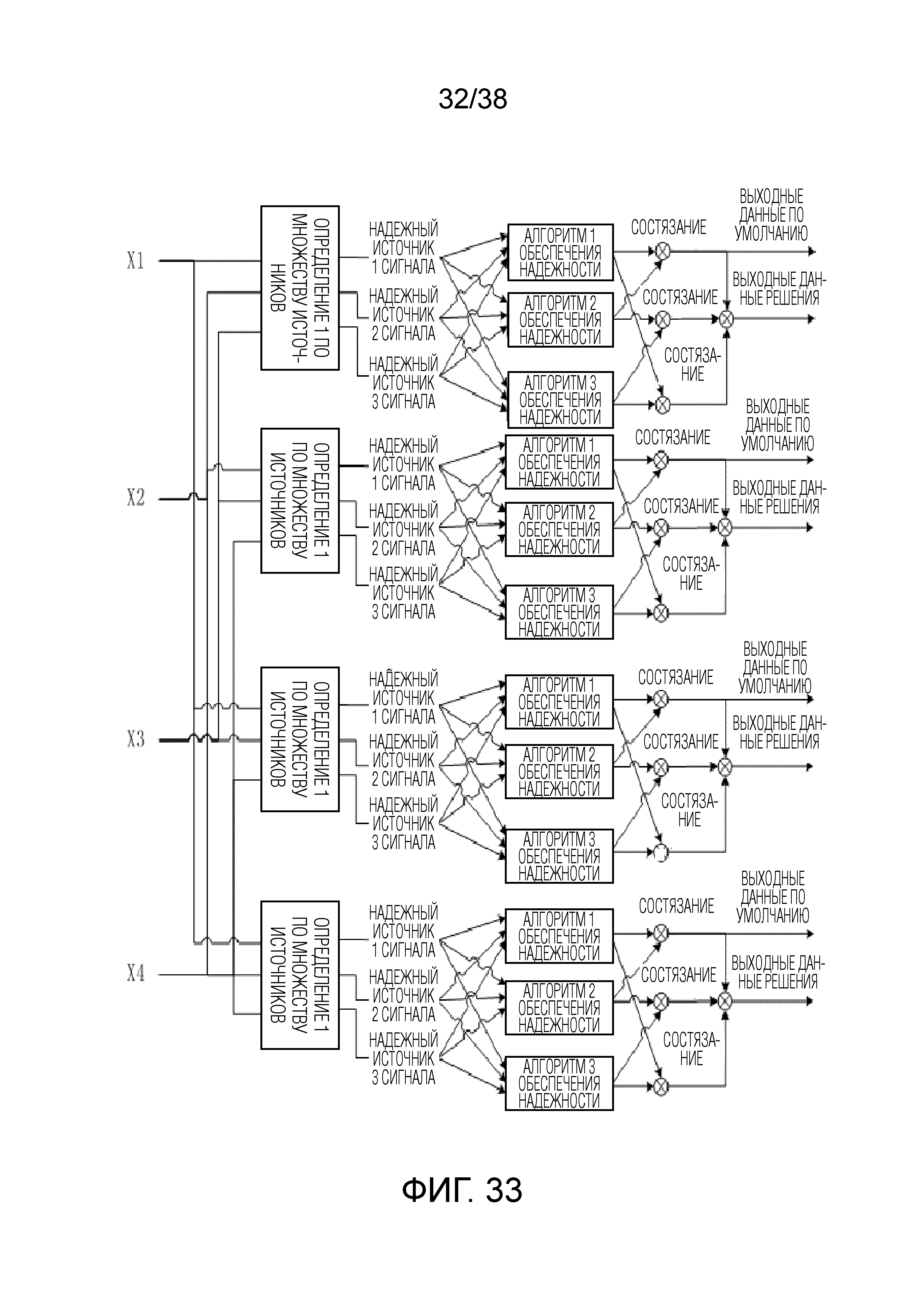
фиг. 33 - принципиальная схема, показывающая структуру обеспечения надежности выбором двух из трех, включающую в себя множество источников спутникового сигнала, согласно настоящему изобретению;
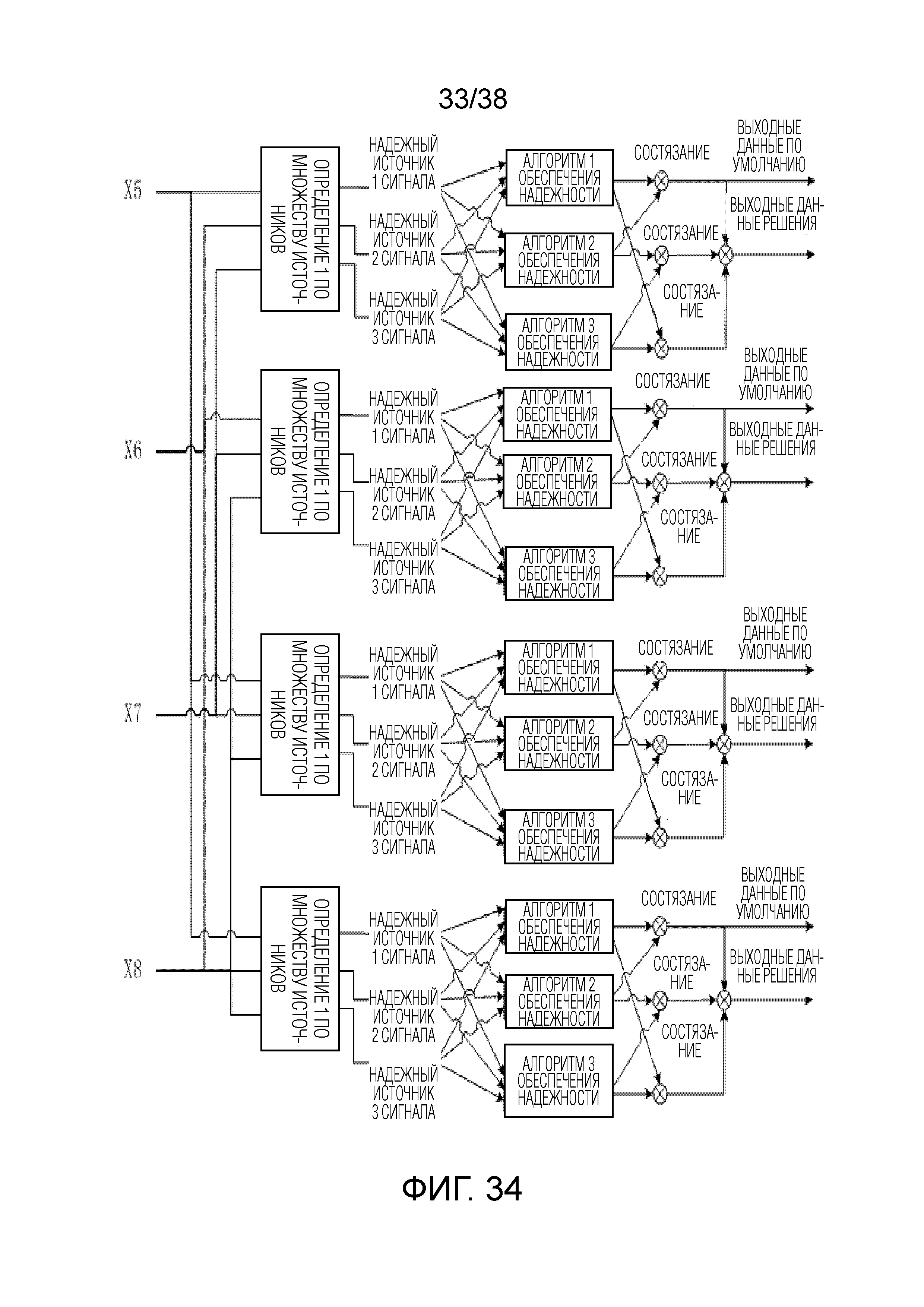
фиг. 34 - принципиальная схема, показывающая структуру обеспечения надежности выбором двух из трех, включающую в себя множество источников сигнала инерциальной навигации, согласно настоящему изобретению;
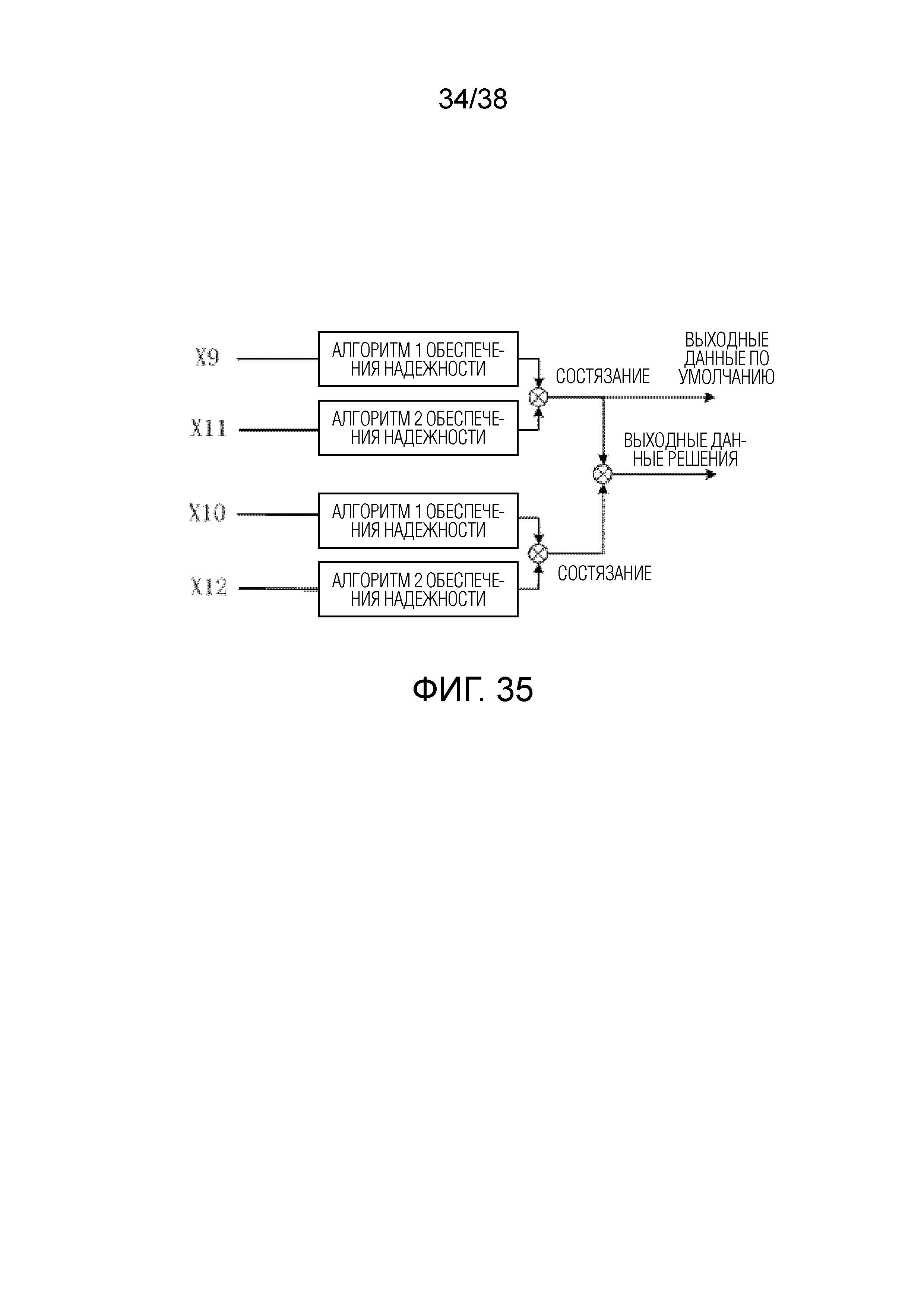
фиг. 35 - принципиальная схема, показывающая структуру обеспечения надежности парой из двух двоек, включающую в себя множество источников внешнего сигнала, согласно настоящему изобретению;
фиг. 36 - принципиальная схема, показывающая структуру обеспечения надежности выбором двух из трех, включающую в себя множество источников спутникового сигнала и множество источников внешнего сигнала, согласно настоящему изобретению;
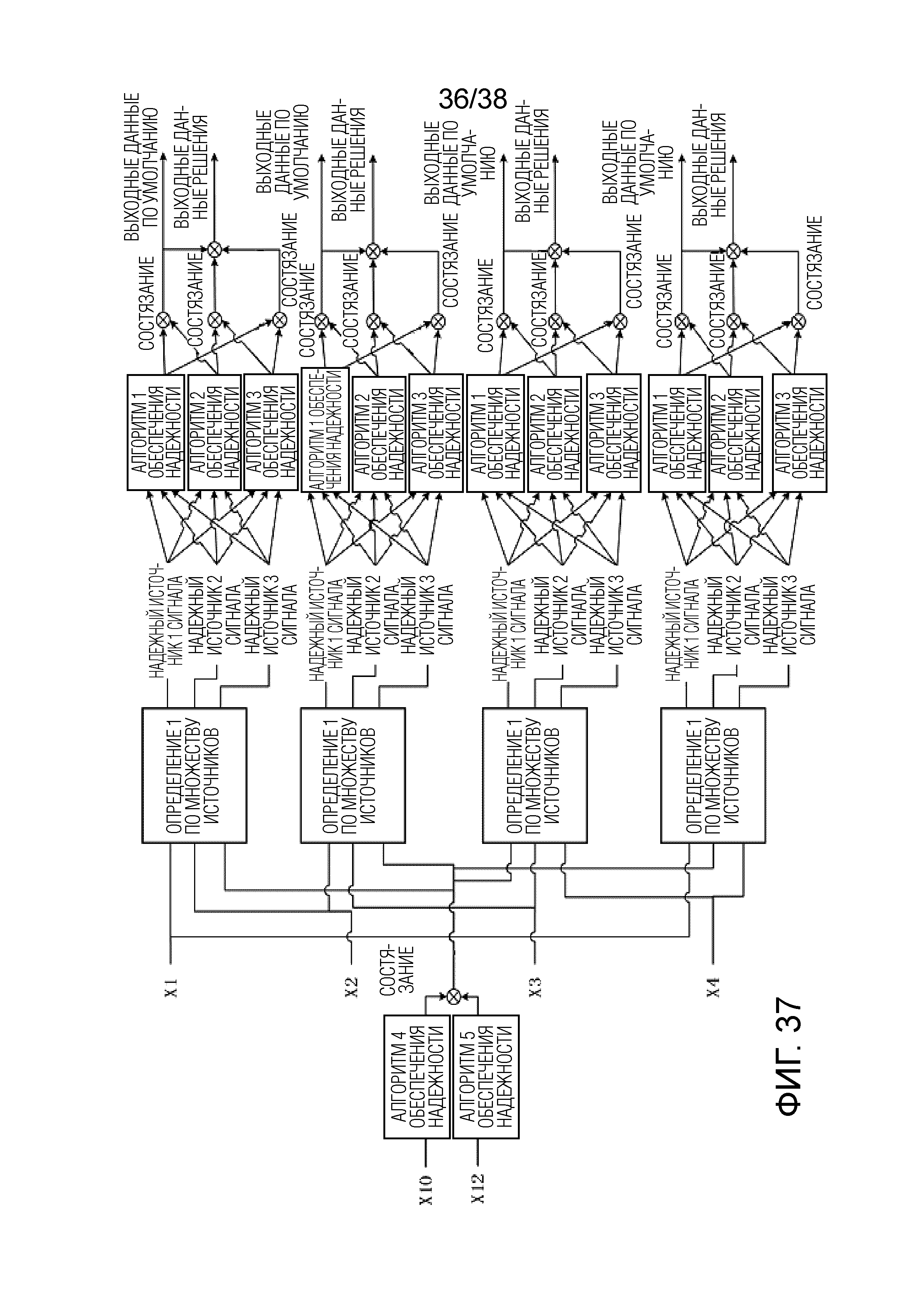
фиг. 37 - принципиальная схема, показывающая структуру обеспечения надежности выбором двух из трех, включающую в себя множество источников сигнала инерциальной навигации и множество источников внешнего сигнала, согласно настоящему изобретению;
фиг. 38 - принципиальная структурная схема, показывающая систему для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению; и
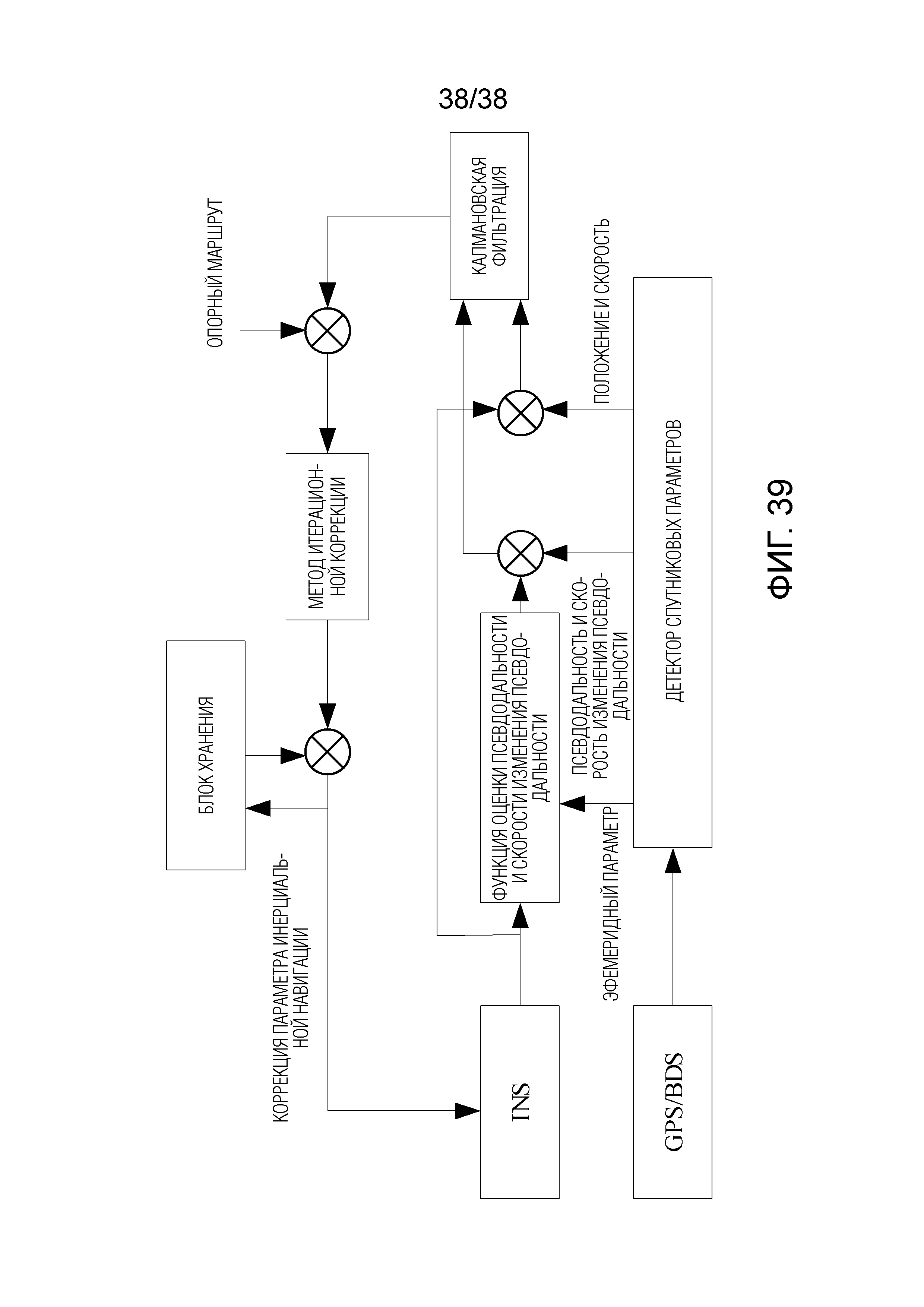
фиг. 39 - принципиальная схема, показывающая принцип алгоритма слияния итерационных правок исходного маршрута согласно настоящему изобретению.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Предусмотрен способ для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению. С помощью этого способа, измерение скорости в реальном времени и непрерывное определение положения могут выполняться надежно и достоверно на основании данных коррекции и данных инерциальной навигации в случае, если данные коррекции обнаружены, и даже в случае, если данные коррекции не обнаружены, измерение скорости в реальном времени и непрерывное определение положения также могут надежно и достоверно выполняться на основании данных инерциальной навигации, что ведет к высокой стабильности, надежности и точности. Согласно настоящему изобретению, дополнительно предусмотрены устройство для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения, а также система для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения, которая включает в себя приведенное выше устройство.
Для того чтобы сделать цели, технические решения и преимущества в вариантах осуществления настоящего изобретения более ясными, технические решения в вариантах осуществления настоящего изобретения ясно и полно описаны в дальнейшем со ссылкой на чертежи в вариантах осуществления настоящего изобретения. Очевидно, что описанные варианты осуществления являются всего лишь некоторыми, нежели всеми из вариантов осуществления настоящего изобретения. Любые другие варианты осуществления, полученные специалистами в данной области техники на основании вариантов осуществления настоящего изобретения без какого-либо творческого труда, будут входить в объем охраны настоящего изобретения.
Перед построением технических решений по настоящему изобретению были проанализированы следующие шесть решений.
В решении 1 используется датчик скорости. Скорость движения поезда получается посредством подсчета импульсов с помощью датчика скорости на конце вала вертлюжной колесной пары (или роторного электродвигателя). Однако, поезд на магнитной подушке не оснащен вертлюжной колесной парой (и роторным электродвигателем), таким образом, датчик скорости не предусмотрен.
В решении 2 применяется способ выполнения определения положения с использованием опросного транспондера. Опросные транспондеры размещены вдоль рельса с определенным интервалом по расстоянию для обнаружения абсолютного положения поезда. Каждый раз, когда поезд проезжает один опросный транспондер, получается абсолютное положение поезда. Выводится положение поезда между двумя опросными транспондерами. В этом решении требуется размещать опросные транспондеры вдоль рельса с интервалом по расстоянию в 1 км, а также на каждой стрелке и каждом железнодорожном переезде. Поскольку есть много наземных устройств, обслуживать такие устройства невыгодно. Кроме того, нет опросных транспондеров, способных определять положение поезда, движущегося на скорости более 400 км/ч.
В решении 3 применяется способ выполнения определения положения с использованием рельсовой цепи. Рельс разделен на множество сегментов, и современное передающее устройство и современное приемное устройство, соответственно, размещены на двух концах каждого из множества сегментов для формирования контура передачи информации вместе с рельсом. Когда поезд попадает на сегмент, рельсовая цепь замыкается накоротко колесами, таким образом, информация не может передаваться на приемную сторону, за счёт чего выполняется обнаружение и определение положения над поездом. Этот способ имеет недостаток, состоящий в том, что длина рельсовой цепи служит в качестве минимальной единицы измерения, вследствие чего невозможно формировать движущийся в реальном смысле блок и обнаруживать скорость поезда.
В решении 4 используется фотоэлектрический датчик скорости. Светоизлучающие устройства размещены вдоль рельса, а приемный датчик размещен в поезде. Скорость поезда измеряется посредством подсчета принятых импульсов. В этом решении требуется размещать дополнительное вспомогательное оборудование, а оно легко подвержено влиянию условий эксплуатации, таким образом, данное решение не пригодно для системы измерения сверхвысокой скорости и определения положения.
В решении 5 скорость измеряется с помощью индукционного статорного полюса. С источником индукционного статорного полюсного сигнала, низкая скорость измеряется на основании переднего фронта и заднего фронта сигнала, а высокая скорость измеряется подсчетом принятых импульсов.
В решении 6 для выполнения определения абсолютного положения используется индукционный кодовый датчик положения. Источники сигнала индукционного кодового датчика положения размещены вдоль рельса с определенным интервалом по расстоянию для выполнения над поездом определения абсолютного положения. На участке между двумя индукционными кодовыми датчиками положения, определение относительного положения выполняется посредством интегрирования набранных скоростей, измеряемых посредством использования индукционного статорного полюса.
Для описания измерения скорости индукционным статорным полюсом и определения абсолютного положения индукционным кодовым датчиком положения можно обратиться к уровню техники, который в материалах настоящей заявки повторно не воспроизводится.
Хотя вышеприведенные решения проанализированы, такие решения не принимаются вследствие различных недостатков в каждом из вышеприведенных решений. На основании этого, предусмотрены способ, устройство и система для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения.
Перед описанием способа, устройства и системы для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению, описаны измерение скорости в реальном времени и непрерывное определение положение.
Обратимся к фиг. 1, которая является принципиальной схемой, показывающей принцип для выполнения измерения скорости в реальном времени согласно настоящему изобретению.
Измерение скорости в реальном времени указывает, что период Δt времени от момента времени, когда введена информация из источника сигнала скорости, до момента времени, когда выведен результат измерения скорости, удовлетворяет временному требованию системы управления реального времени, то есть, Δt≤Δtmax, и максимальная величина ΔVmax изменения скорости в течение периода Δt времени удовлетворяет требованию системы управления в реальном времени, то есть, ΔVt≤ΔVmax.
Обратимся к фиг. 2, которая является принципиальной схемой, показывающей принцип для выполнения непрерывного определения положения согласно настоящему изобретению.
Разность ΔS по расстоянию между двумя моментами определения положения, смежными по времени, удовлетворяет требованию системы управления в реальном времени, то есть, ΔS≤ΔSmax, и отклонение ΔS' положения между моментом определения положения и реальным положением, соответствующим моменту определения положения, удовлетворяет требованию системы управления в реальном времени, то есть, ΔS'≤ΔS'max.
Обратимся к фиг. 3, которая является блок-схемой способа надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению. Способ включает в себя следующие этапы с S11 по S12.
На этапе S11 обнаруживаются данные инерциальной навигации из источника сигнала инерциальной навигации, размещенного в поезде, и обнаруживаются данные коррекции из источника сигнала коррекции. Источник сигнала коррекции включает в себя источник спутникового сигнала, размещенный в поезде. Данные коррекции включают в себя спутниковые данные.
Более точно, требуется заблаговременно размещать источник сигнала коррекции и заблаговременно размещать источник сигнала инерциальной навигации в поезде. Источник сигнала коррекции включает в себя источник спутникового сигнала. Соответственно, данные коррекции включают в себя спутниковые данные.
В дополнение, с точки зрения себестоимости, может быть один источник сигнала коррекции и один источник сигнала инерциальной навигации. С точки зрения точности, надежности и достоверности определения положения, могут иметься множество источников сигнала коррекции и множество источников сигнала инерциальной навигации. В материалах настоящей заявки количество источников сигнала коррекции и количество источников сигнала инерциальной навигации не ограничено и может определяться согласно фактическим условиям.
На практике, обнаруживаются данные инерциальной навигации (в том числе, информация об ускорении, информация об угловой скорости, и тому подобное) из источника сигнала инерциальной навигации и данные коррекции из источника сигнала коррекции.
На этапе S12, в случае, если данные коррекции не обнаружены, текущая скорость и текущее положение поезда определяются на основании данных инерциальной навигации. В случае, если данные коррекции обнаружены, данные инерциальной навигации корректируются с использованием данных коррекции, а текущая скорость и текущее положение поезда определяются на основании скорректированных данных инерциальной навигации.
Источник сигнала коррекции включает в себя источник спутникового сигнала. Данные коррекции включают в себя спутниковые данные. Поскольку источник спутникового сигнала чувствителен к условиям эксплуатации и неисправности спутника, эксплуатационные качества источника спутникового сигнала могут ухудшаться в случае, если неисправность возникает на спутнике или в поезде в определенной окружающей обстановке. Например, в случае, если источником спутникового сигнала является глобальная система определения местоположения (GPS), а поезд проезжает через группу туннелей, спутниковый сигнал не обнаруживается, и GPS не может поставлять никаких спутниковых данных, вследствие чего измерение скорости и определение положения могут не выполняться на основании спутниковых данных.
По сравнению с источником сигнала коррекции, источник сигнала инерциальной навигации стабилен и не подвержен влиянию условий эксплуатации, таким образом, данные инерциальной навигации всегда обнаруживаются, несмотря на изменение окружающей обстановки, в которой расположен поезд. Поэтому, в случае, если данные коррекции не обнаруживаются, текущая скорость и текущее положение поезда определяются на основании данных инерциальной навигации, а в случае, если данные коррекции обнаружены, данные инерциальной навигации корректируются с использованием данных коррекции, тем самым получая надежные и достоверные текущую скорость и текущее положение поезда.
Предусмотрен способ надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению, который включает в себя: обнаружение данных инерциальной навигации из источника сигнала инерциальной навигации, размещенного в поезде, и обнаружение данных коррекции из источника сигнала коррекции, при этом, источник сигнала коррекции включает в себя источник спутникового сигнала, размещенный в поезде, а данные коррекции включают в себя спутниковые данные; и определение, в случае, если данные коррекции не обнаружены, текущей скорости и текущего положения поезда на основании данных инерциальной навигации, и коррекцию, в случае, если данные коррекции обнаружены, данных инерциальной навигации с использованием данных коррекции, и определение текущей скорости и текущего положения поезда на основании скорректированных данных инерциальной навигации.
Из настоящего изобретения может быть видно, что обнаруживаются как данные инерциальной навигации, так и данные коррекции, а образ действия для получения текущей скорости и текущего положения поезда определяется с учётом данных инерциальной навигации в качестве исходных данных, в зависимости от результата обнаружения данных коррекции. В случае, если данные коррекции обнаружены, измерение скорости в реальном времени и непрерывное определение положения могут выполняться надежно и достоверно на основании данных коррекции и данных инерциальной навигации. Даже в случае, если данные коррекции не обнаружены, измерение скорости в реальном времени и непрерывное определение положения могут выполняться надежно и достоверно на основании данных инерциальной навигации. Таким образом, могут достигаться высокие стабильность, надежность и точность.
Предпочтительно, способ дополнительно включает в себя: передачу текущей скорости и текущего положения. После того, как текущая скорость и текущее положение получены, текущая скорость и текущее положение поезда могут кодироваться и передаваться в схему интерфейса связи в ответ на запрос из внешнего устройства, тем самым, реализуя совместное использование данных.
Кроме того, для того чтобы помогать оператору своевременно узнавать текущую скорость и текущее положение поезда, текущая скорость и текущее положение дополнительно передаются на еще одно устройство после получения для отображения на дисплейном экране или широковещательной передачи.
Предпочтительно, данные коррекции дополнительно включают в себя: данные скорости из источника статорного полюсного сигнала, размещенного на рельсе для поезда; и/или данные положения с индукционного кодового датчика положения, размещенного на рельсе для поезда.
В случае, если спутниковые данные не обнаружены, данные инерциальной навигации корректируются с использованием данных коррекции посредством выполнения этапов: коррекции данных скорости в данных инерциальной навигации с использованием данных скорости из источника статорного полюсного сигнала, и/или коррекции данных положения в данных инерциальной навигации с использованием данных положения от индукционного кодового датчика положения. В случае, если спутниковые данные обнаружены, данные инерциальной навигации корректируются с использованием данных коррекции посредством выполнения этапов: коррекции данных скорости в данных инерциальной навигации с использованием данных скорости из источника статорного полюсного сигнала и спутниковых данных, и/или коррекции данных положения в данных инерциальной навигации с использованием данных положения с индукционного кодового датчика положения и из спутниковых данных.
Для дополнительного повышения точности, надежности и достоверности измерения скорости и определения положения поезда, поскольку многие рельсы выполнены с источниками статорного полюсного сигнала и/или индукционным кодовым датчиком положения, а поезд, соответственно, оснащен источником статорного полюсного сигнала и индукционным кодовым датчиком положения, данные инерциальной навигации могут корректироваться с использованием данных скорости, полученных из источника статорного полюсного сигнала, и данных положения, полученных от индукционного кодового датчика положения.
Более точно, поскольку источник спутникового сигнала чувствителен к условиям эксплуатации, требуется учитывать то обстоятельство, обнаружены ли спутниковые данные, при коррекции данных инерциальной навигации с использованием данных коррекции. В случае, если спутниковые данные обнаружены, данные скорости в данных инерциальной навигации корректируются посредством использования данных скорости из источника статорного полюсного сигнала и данных скорости в спутниковых данных, и/или данные положения в данных инерциальной навигации корректируются посредством использования данных положения с индукционного кодового датчика положения и из данных положения в спутниковых данных. Таким образом, точность, надежность и достоверность измерения скорости и определения положения для поезда могут быть дополнительно улучшены.
Способ коррекции данных скорости в данных инерциальной навигации с использованием данных скорости из источника статорного полюсного сигнала и данных скорости в спутниковых данных, и/или коррекции данных положения в данных инерциальной навигации с использованием данных положения от индукционного кодового датчика положения и данных положения в спутниковых данных, в настоящем изобретении не ограничен.
Предпочтительно, коррекция данных скорости в данных инерциальной навигации с использованием данных скорости из источника статорного полюсного сигнала и спутниковых данных, включает в себя: коррекцию с заданным временным интервалом коррекции данных скорости в данных инерциальной навигации с использованием скорректированной скорости, полученной на основании текущей скорости по спутниковому сигналу и текущей скорости по полюсному сигналу, в качестве начальной скорости в ходе коррекции данных текущей скорости.
Более точно, в случае обнаружения скорости поезда текущая скорость по спутниковому сигналу и текущая скорость по полюсному сигналу получаются с заданным временным интервалом коррекции, и скорректированная скорость получается на основании скорости по спутниковому сигналу и скорости по полюсному сигналу. Скорректированная скорость указывает текущую скорость поезда. В течение заданного временного интервала коррекции, скорость поезда получается на основании скорректированной скорости в комбинации с ускорением и временем в данных инерциальной навигации.
Должно быть отмечено, что образ действий получения скорректированной скорости на основании скорости спутникового сигнала и скорости полюсного сигнала не ограничен в материалах настоящей заявки. Например, среднее значение скорости спутникового сигнала и скорости полюсного сигнала может рассчитываться в качестве скорректированной скорости, или взвешенное среднее значение скорости спутникового сигнала и скорости полюсного сигнала может быть рассчитано в качестве скорректированной скорости, или скорректированная скорость может получаться иным образом, который не ограничен в материалах настоящей заявки и может определяться согласно фактическим условиям.
В дополнение, заданный временной интервал коррекции определяется на основании требования к точности и непрерывности скорости или положения, принимая во внимание количество спутников и состояние поезда. Поэтому, временной интервал может быть изменен в зависимости от различных факторов. Поскольку есть временной интервал обновления в случае обнаружения скорости и положения поезда, заданный временной интервал коррекции устанавливается таким образом, чтобы скорость и положение, полученные, когда выполняется операция обновления в каком-нибудь заданном временном интервале коррекции, то есть скорость и положение во время обновления, находились в рамках предела допустимых погрешностей.
Ниже описан пример для облегчения понимания. В примере, момент t1 установлен в качестве начального момента времени текущего заданного временного интервала коррекции, а момент t2 времени установлен в качестве конечного момента текущего заданного временного интервала коррекции, то есть, начального момента времени следующего заданного временного интервала коррекции. Должно быть отмечено, что скорость и положение, полученные во время обновления момента t1 времени или момента t2 времени, имеют наивысшую точность и минимальную погрешность, а скорость и положение, полученные во время обновления между моментом t1 времени и моментом t2 времени, могут иметь некоторые погрешности, обусловленные особенностями инерциальной навигационной системы, однако, эти погрешности находятся в допустимых пределах. Должно быть отмечено, что заданный временной интервал коррекции очень мал, что может рассматриваться даже в качестве реального времени.
Предпочтительно, коррекция данных положения в данных инерциальной навигации с использованием данных положения от индукционного кодового датчика положения и из спутниковых данных, включает в себя: коррекцию с заданным временным интервалом коррекции данных положения в данных инерциальной навигации, используя скорректированное положение, полученное на основании текущего положения по спутниковому сигналу и текущего положения по индукционному кодовому датчику положения, в качестве начального положения в ходе коррекции данных текущего положения.
Аналогично приведенному выше образу действий коррекции скорости, в случае определения положения поезда, текущее положение по спутниковому сигналу и текущее положение по индукционному кодовому датчику скорости получаются с заданным временным интервалом коррекции, а скорректированное положение получается на основании положения по спутниковому сигналу и положения по индукционному кодовому датчику положения. Скорректированное положение указывает положение поезда в текущий момент времени. В течение заданного временного интервала коррекции, положение поезда получается на основании скорректированного положения в комбинации с ускорением и временем в данных инерциальной навигации.
Должно быть отмечено, что образ действия для получения скорректированного положения на основании положения по спутниковому сигналу и положения по полюсному сигналу не ограничен в материалах настоящей заявки. Например, среднее значение положения по спутниковому сигналу и положения по полюсному сигналу может рассчитываться в качестве скорректированного положения, или средневзвешенное значение положения по спутниковому сигналу и положения по полюсному сигналу может быть рассчитано в качестве скорректированного положения, или скорректированное положение может получаться иным образом, который не ограничен в материалах настоящей заявки и может определяться согласно фактическим условиям.
В дополнение, должно быть отмечено, что заданный временной интервал коррекции для положения поезда может быть равным или не равным заданному временному интервалу коррекции для скорости поезда, что может определяться согласно фактическим условиям.
Предпочтительно, количество источников статорного полюсного сигнала имеет значение больше одного, и более одного источников статорного полюсного сигнала выполнены с возможностью формирования структуры обеспечения надежности парой из двух двоек; и/или количество индукционных кодовых датчиков положения имеет значение больше одного, и более одного индукционных кодовых датчиков положения выполнены с возможностью формирования структуры обеспечения надежности парой из двух двоек.
Как описано в вышеизложенном, многие поезда оснащены источниками статорного полюсного сигнала и индукционными кодовыми датчиками положения. Для повышения точности, надежности и достоверности измерения скорости и определения положения для поезда может иметься множество источников статорного полюсного сигнала и множество индукционных кодовых датчиков положения. Множество источников статорного полюсного сигнала выполнено с возможностью формирования структуры обеспечения надежности парой из двух двоек согласно принципу структуры обеспечения надежности. Исходная скорость и скорость решения у скорости в реальном времени выводятся структурой обеспечения надежности парой из двух двоек. Множество индукционных кодовых датчиков положения также могут быть выполнены с возможностью формирования структуры обеспечения надежности парой из двух двоек. Исходное положение и положение решения у непрерывного положения выводятся структурой обеспечения надежности парой из двух двоек.
Поскольку имеется множество источников статорного полюсного сигнала и множество индукционных кодовых датчиков положения, даже если один или более из источников статорного полюсного сигнала и индукционных кодовых датчиков положения неисправны, данные инерциальной навигации по-прежнему корректируются с использованием оставшихся нормальных источников статорного полюсного сигнала и индукционных кодовых датчиков положения.
Множество источников статорного полюсного сигнала и множество индукционных кодовых датчиков положения также могут быть, соответственно, организованы для формирования других структур обеспечения надежности, например, структуры обеспечения надежности выбором двух из множества (более чем из трех), структуры обеспечения надежности выбором множества (равного или большего количества, чем три) из множества (более чем из трех), которые в материалах настоящей заявки не ограничены и могут быть определены согласно фактическим условиям.
Предпочтительно, количество источников сигнала инерциальной навигации имеет значение больше одного, и более одного источников сигнала инерциальной навигации выполнены с возможностью формирования структуры обеспечения надежности выбором двух из трех. Количество источников спутникового сигнала имеет значение больше одного, и более одного источников спутникового сигнала выполнены с возможностью формирования структуры обеспечения надежности выбором двух из трех.
Для повышения точности, надежности и достоверности измерения скорости и определения положения для поезда может иметься множество источников сигнала инерциальной навигации и множество источников спутникового сигнала. Множество источников сигнала инерциальной навигации выполнены с возможностью формирования структуры обеспечения надежности выбором двух из трех согласно принципу структуры обеспечения надежности. Исходная скорость и скорость решения у скорости в реальном времени выводятся структурой обеспечения надежности выбором двух из трех. Множество источников спутникового сигнала также может быть выполнено с возможностью формирования структуры обеспечения надежности выбором двух из трех согласно принципу структуры обеспечения надежности. Исходное положение и положение решения у непрерывного положения выводятся структурой обеспечения надежности выбором двух из трех.
Поскольку имеется множество источников спутникового сигнала и множество источников сигнала инерциальной навигации, даже если один или более источников спутникового сигнала и источников сигнала инерциальной навигации неисправны, скорость и положение поезда также получаются на основании оставшихся нормальных источников спутникового сигнала и источников сигнала инерциальной навигации.
Множество источников спутникового сигнала и множество источников сигнала инерциальной навигации также могут быть выполнены с возможностью формирования других структур обеспечения надежности, которые не ограничены в материалах настоящей заявки и могут быть определены согласно фактическим условиям.
Предпочтительно, структура обеспечения надежности выбором двух из трех перенимает основанный на методе калмановской фильтрации алгоритм обеспечения надежности слияния данных из множества источников для выполнения измерения скорости и определения положения или основанный на методе итерационной коррекции алгоритм обеспечения надежности слияния данных из множества источников для выполнения измерения скорости и определения положения.
Более точно, обратимся к фиг. 4, которая является принципиальной схемой, показывающей принцип основанного на методе калмановской фильтрации алгоритма обеспечения надежности слияния данных из множества источников для измерения скорости и определения положения согласно настоящему изобретению.
Как показано на фиг. 4, x(k/k) указывает скорость или положение, а P(k/k) указывает достоверность. То есть после того, как данные, выведенные из источника сигнала, обработаны с использованием этого алгоритма, выдаются выходные данные, соответствующие текущим входным данным и достоверности выходных данных. Выходные данные с высокой достоверностью оказывают большое влияние на окончательный результат. С основанным на калмановской фильтрации алгоритмом обеспечения надежности слиянием данных из множества источников для измерения скорости и определения положения. точное распределение данных оптимально оценивается, тем самым, уменьшая шум системы и внешние помехи.
Обратимся к фиг. 5, которая является принципиальной схемой, показывающей принцип основанного на методе итерационной коррекции алгоритма обеспечения надежности слияния данных из множества источников для измерения скорости и определения положения согласно настоящему изобретению.
Как показано на фиг. 5, x(k/k) указывает скорость или положение, а e(k/k) указывает погрешность наблюдения. С основанным на методе итерационной коррекции алгоритмом обеспечения надежности слиянием данных из множества источников для измерения скорости и определения положения, погрешность оценки системы постоянно корректируется, тем самым, улучшая точность системы и устраняя помехи общего вида.
Другие алгоритмы обеспечения надежности могут использоваться в структуре обеспечения надежности выбором двух из трех до тех пор, пока достигается цель настоящего изобретения.
Предпочтительно, количество источников сигнала инерциальной навигации имеет значение четыре, и количество источников спутникового сигнала имеет значение четыре.
Количество источников сигнала инерциальной навигации и количество источников спутникового сигнала в материалах настоящей заявки не ограничены. Четыре источника сигнала инерциальной навигации могут быть одного и того же типа или разных типов. Подобным образом, четыре источника спутникового сигнала могут быть одного и того же типа или разных типов, которые в материалах настоящей заявки не ограничены.
Предпочтительно, четыре источника спутникового сигнала реализованы соответственно микропроцессорным набором для спутников BeiDou, микропроцессорным набором для спутников GPS, микропроцессорным набором для спутников GLONASS и микропроцессорным набором для спутников Galileo.
Четыре источника спутникового сигнала могут быть реализованы соответственно двумя микропроцессорными наборами для спутников BeiDou, микропроцессорным набором для спутников GPS и микропроцессорным набором для спутников GLONASS, или могут быть реализованы посредством перестроек четырех источников спутникового сигнала из вышеприведенного предпочтительного варианта осуществления, который в материалах настоящей заявки не ограничен.
Для описания способа надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению, обратимся к фиг. 6, которая является принципиальной блок-схемой, показывающей принцип для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению.
На практике, для повышения точности, надежности и достоверности измерения скорости и определения положения для поезда, достоверность данных из источников сигнала может предварительно определяться после того, как получены данные, для выбора достоверных источников сигнала. Затем, комбинация источников сигнала определяется согласно стратегии выбора источников сигнала, и данные из достоверных источников сигнала обрабатываются с использованием алгоритма обеспечения надежности. Скорости и положения, полученные с использованием алгоритмов обеспечения надежности, обрабатываются посредством конкурирующих процессов для получения окончательных скорости и положения.
В дополнение «надежный и достоверный» в настоящем изобретении указывает, что, в случае если некоторые из источников сигнала потеряны, информация о скорости и информация о положении могут выдаваться надежно и достоверно с помощью способа для выполнения измерения скорости в реальном времени и непрерывного определения положения, а информация о скорости и информация о положении распознаются и используются авторизованным устройством. В случае, если потерянные источники сигнала восстанавливаются, эти источники сигнала могут без резких переходов выполнять обычные измерение скорости и определение положения. Теоретически, до тех пор, пока является действующим по меньшей мере один источник сигнала, система может функционировать нормально, где уровень функционирования определяется на основании требования к надежности.
Что касается вышеприведенной структуры обеспечения надежности, обратимся к фиг. 7, которая является принципиальной схемой структуры обеспечения надежности парой из двух двоек с множеством источников, основанной на информации о положении, информации о скорости и информации об ускорении, согласно настоящему изобретению.
Структура обеспечения надежности парой из двух двоек с множеством источников формируется на основании информации о положении, информации о скорости и информации об ускорении. С этой структурой обеспечения надежности, потребность в надежном и достоверном выполнении измерения скорости в реальном времени и непрерывного определения положения удовлетворяется даже в случае, если потеряно несколько источников сигнала.
Следует отметить, что положение и скорость получаются из спутниковой системы или инерциальной навигационной системы, а ускорение типично получается из инерциальной навигационной системы.
Обратимся к фиг. 8, которая является принципиальной схемой структуры обеспечения надежности выбором двух из трех с множеством источников, основанной на информации о положении, информации о скорости и информации об ускорении, согласно настоящему изобретению.
Структура обеспечения надежности выбором двух из трех с множеством источников формируется на основании информации о положении, информации о скорости и информации об ускорении. С этой структурой обеспечения надежности, потребность в надежном и достоверном выполнении измерения скорости в реальном времени и непрерывного определения положения удовлетворяется даже в случае, если потеряны любые два из источников сигнала.
Обратимся к фиг. 9, которая является принципиальной схемой структуры обеспечения надежности выбором двух из множества с множеством источников, основанной на информации о положении, информации о скорости и информации об ускорении, согласно настоящему изобретению.
Структура обеспечения надежности выбором двух из множества с множеством источников формируется на основании информации о положении, информации об ускорении, и тому подобного. С этой структурой обеспечения надежности, потребность в надежном и достоверном выполнении измерения скорости в реальном времени и непрерывного определения положения удовлетворяется даже в случае, если есть только один источник сигнала.
Обратимся к фиг. 10, которая является принципиальной схемой структуры обеспечения надежности множественного выбора с множеством источников, основанной на информации о положении, информации о скорости и информации об ускорении, согласно настоящему изобретению.
Структура обеспечения надежности множественного выбора с множеством источников формируется на основании информации о положении, информации об ускорении, и тому подобного. С этой структурой обеспечения надежности, потребность в надежном и достоверном выполнении измерения скорости в реальном времени и непрерывного определения положения удовлетворяется даже в случае, если есть только один источник сигнала для измерения скорости и определения положения.
Обратимся к фиг. 11, которая является принципиальной структурной схемой блока слияния и обработки данных, поддерживающего быстрое расширение, согласно настоящему изобретению.
Данные из множества источников обрабатываются посредством операции преобразования, например, на электрическом уровне и в протоколе связи, с помощью интерфейса связи для получения разнородных изоморфных данных с одним и тем же форматом и масштабом, и разнородные изоморфные данные передаются в процессор слияния данных с помощью высокоскоростной шины для обработки слияния данных над данными из множества источников. Блок слияния и обработки данных может быть реализован в виде фрагмента управляющей программы в процессоре слияния данных.
Обратимся к фиг. 12, которая является принципиальной схемой, показывающей принцип метода интеграции информации тесно связанных множества источников, основанного на источнике сигнала инерциальной навигации, согласно настоящему изобретению.
Обратимся к фиг. 13, которая является принципиальной схемой, показывающей инфраструктуру алгоритма обеспечения надежности, согласно настоящему изобретению.
Алгоритм обеспечения надежности выполнен с возможностью выполнения операции выбора и синтеза над данными из источника сигнала для измерения скорости и источника сигнала для непрерывного определения положения в структуре обеспечения надежности согласно подходящему правилу обеспечения надежности. Математический метод, вовлеченный в алгоритм обеспечения надежности, может включать в себя, но не в качестве ограничения, метод калмановской фильтрации, метод итерационной коррекции, функцию оценки псевдодальности и скорости изменения псевдодальности.
В дополнение, быстрое разрешение целочисленной неопределенности выполняется посредством использования исходных данных со спутника множества источников и из инерциальной навигационной системы с передовым алгоритмом, и плохо обусловленное уравнение корректируется алгоритмом, так чтобы точность целочисленной неопределенности была улучшена, тем самым, дополнительно улучшая скорость решения уравнения, таким образом, добиваясь выходного результата в реальном времени.
Обратимся к фиг. 14, которая является принципиальной схемой, показывающей принцип алгоритма целочисленной неопределенности, основанного на методе наименьших квадратов с быстрой итерационной сходимостью, согласно настоящему изобретению.
Следует отметить, что D(t) указывает скорость или положение.
Что касается измерения скорости в реальном времени, предусмотрен алгоритм быстрого разрешения целочисленной неопределенности, основанный на методе наименьших квадратов с быстрой итерационной сходимостью согласно настоящему изобретению, с помощью которого быстрый процесс разрешения целочисленной неопределенности выполняется на основании строгого отслеживания метода наименьших квадратов с быстрой итерационной сходимостью.
Обратимся к фиг. 15, которая является принципиальной схемой, показывающей принцип алгоритма целочисленной неопределенности, основанного на методе машинного обучения, согласно настоящему изобретению.
Должно быть отмечено, что D(t) указывает скорость или положение.
Что касается измерения скорости в реальном времени, предусмотрен алгоритм быстрого разрешения целочисленной неопределенности, который включает в себя оптимизационный нечеткий алгоритм разрешения, основанный на методе машинного обучения. Таким образом, воздействие неизвестных помех на алгоритм быстрого разрешения целочисленной неопределенности может быть устранено вследствие мощной адаптивной способности метода машинного обучения.
Обратимся к фиг. 16, которая является принципиальной схемой, показывающей принцип алгоритма целочисленной неопределенности, основанного на методе адаптивной неопределенности, согласно настоящему изобретению.
Что касается измерения скорости в реальном времени, предусмотрен алгоритм быстрого разрешения целочисленной неопределенности, который включает в себя метод наименьших квадратов с адаптивной неопределенностью.
Обратимся к фиг. 17, которая является принципиальной схемой, показывающей принцип способа оценки параметров, основанного на улучшенном генетическом алгоритме малой окрестности, согласно настоящему изобретению.
Для измерения скорости в реальном времени, предусмотрен алгоритм быстрого разрешения целочисленной неопределенности, который включает в себя способ оценки параметров, основанный на улучшенном генетическом алгоритме малой окрестности для плохо обусловленного уравнения быстрого определения положения. С алгоритмом быстрого разрешения целочисленной неопределенности, параметры для плохо обусловленного уравнения определения положения оцениваются достоверно вследствие возможностей всеобъемлющего поиска улучшенного генетического алгоритма малой окрестности.
Обратимся к фиг. 18, которая является принципиальной схемой, показывающей принцип способа оценки параметров, основанного на улучшенном гибридном квантовом генетическом алгоритме, согласно настоящему изобретению.
Предусмотрен способ оценки параметров, основанный на улучшенном гибридном квантовом генетическом алгоритме для плохо определенного уравнения быстрого определения положения. Со способом оценки параметров, параметры оцениваются достоверно вследствие преимуществ квантового генетического алгоритма по диапазону поиска и численности заполнения.
Обратимся к фиг. 19, которая является принципиальной схемой, показывающей принцип способа оценки параметров, основанного на алгоритме дуального разложения с применением комплексного вейвлет-преобразования, согласно настоящему изобретению.
Предусмотрен способ оценки параметров для плохо обусловленного уравнения определения положения на основании алгоритма дуального разложения с применением комплексного вейвлет-преобразования.
Обратимся к фиг. 20, которая является принципиальной схемой, показывающей принцип способа контроля данных и анализа ошибок, основанного на нечетком алгоритме, согласно настоящему изобретению.
Что касается непрерывного определения положения, предусмотрен алгоритм для прогнозирования положения поезда в реальном времени между двумя точками определения положения на основании модели в нейронной сети.
Обратимся к фиг. 21, которая является принципиальной схемой, показывающей принцип алгоритма прогнозирования в реальном времени, основанного на модели в нейронной сети.
Для непрерывного определения положения, предусмотрен алгоритм слияния информации о положении в реальном времени, основанный на улучшенном методе калмановской фильтрации.
Обратимся к фиг. 22, которая является принципиальной схемой, показывающей принцип алгоритма слияния информации о положении в реальном времени, основанного на улучшенном методе калмановской фильтрации, согласно настоящему изобретению.
Для непрерывного определения положения, предусмотрен алгоритм слияния информации о положении в реальном времени, основанный на алгоритме фильтрации частиц.
Обратимся к фиг. 23, которая является принципиальной схемой, показывающей принцип алгоритма слияния данных, основанного на методе фильтрации частиц, согласно настоящему изобретению.
Что касается непрерывного определения положения, предусмотрен способ квартерионного разрешения определения положения со слиянием данных, основанный на параметрическом методе Родригеса.
Обратимся к фиг. 24, которая является принципиальной схемой, показывающей принцип алгоритма квартерионного разрешения определения положения со слиянием данных, основанного на параметрическом методе Родригеса, согласно настоящему изобретению.
Что касается измерения скорости в реальном времени, предусмотрена улучшенная структура обеспечения надежности обработки информации о скорости.
Обратимся к фиг. 25, которая является принципиальной схемой, показывающей улучшенную структуру обеспечения надежности обработки информации о скорости, согласно настоящему изобретению.
Эта структура обеспечения надежности включает в себя два блока обработки. Блок совместной обработки сигналов выполнен с возможностью усиления в радиочастотном диапазоне и обработки основной полосы. Блок обработки алгоритма обеспечения надежности выполнен с возможностью выполнения разрешения над информацией о скорости.
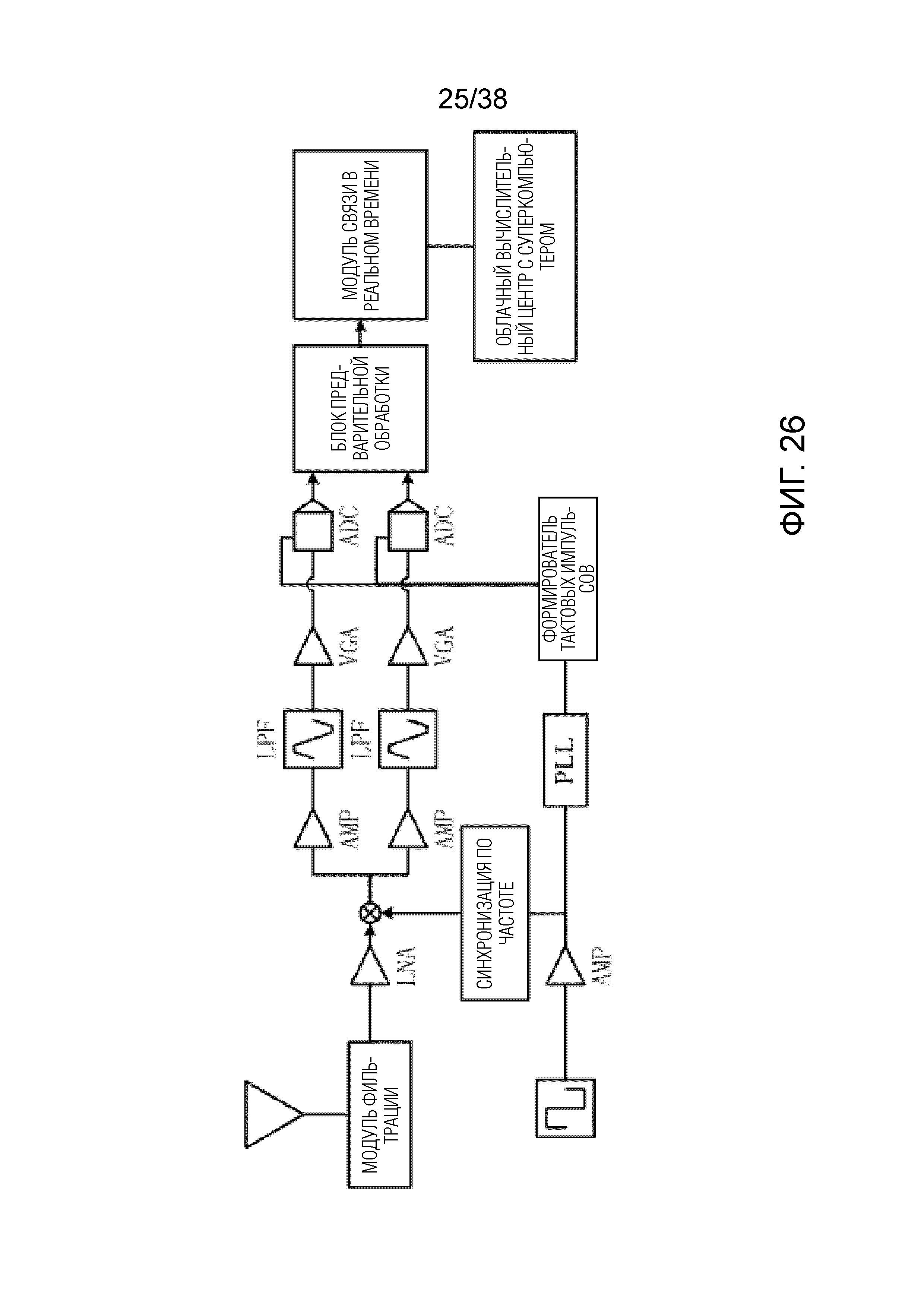
Что касается измерения скорости в реальном времени, предусмотрена улучшенная облачная структура обеспечения надежности обработки информации о скорости. Обратимся к фиг. 26, которая является принципиальной схемой, показывающей еще одну улучшенную структуру обеспечения надежности обработки информации о скорости, согласно настоящему изобретению.
Эта структура обеспечения надежности включает в себя специализированный интерфейсный модуль обработки сигнала и модуль связи в реальном времени. Модуль связи в реальном времени выполнен с возможностью передачи информации об исходном положении в облачный вычислительный центр с суперкомпьютером и приёма результата вычисления из облака.
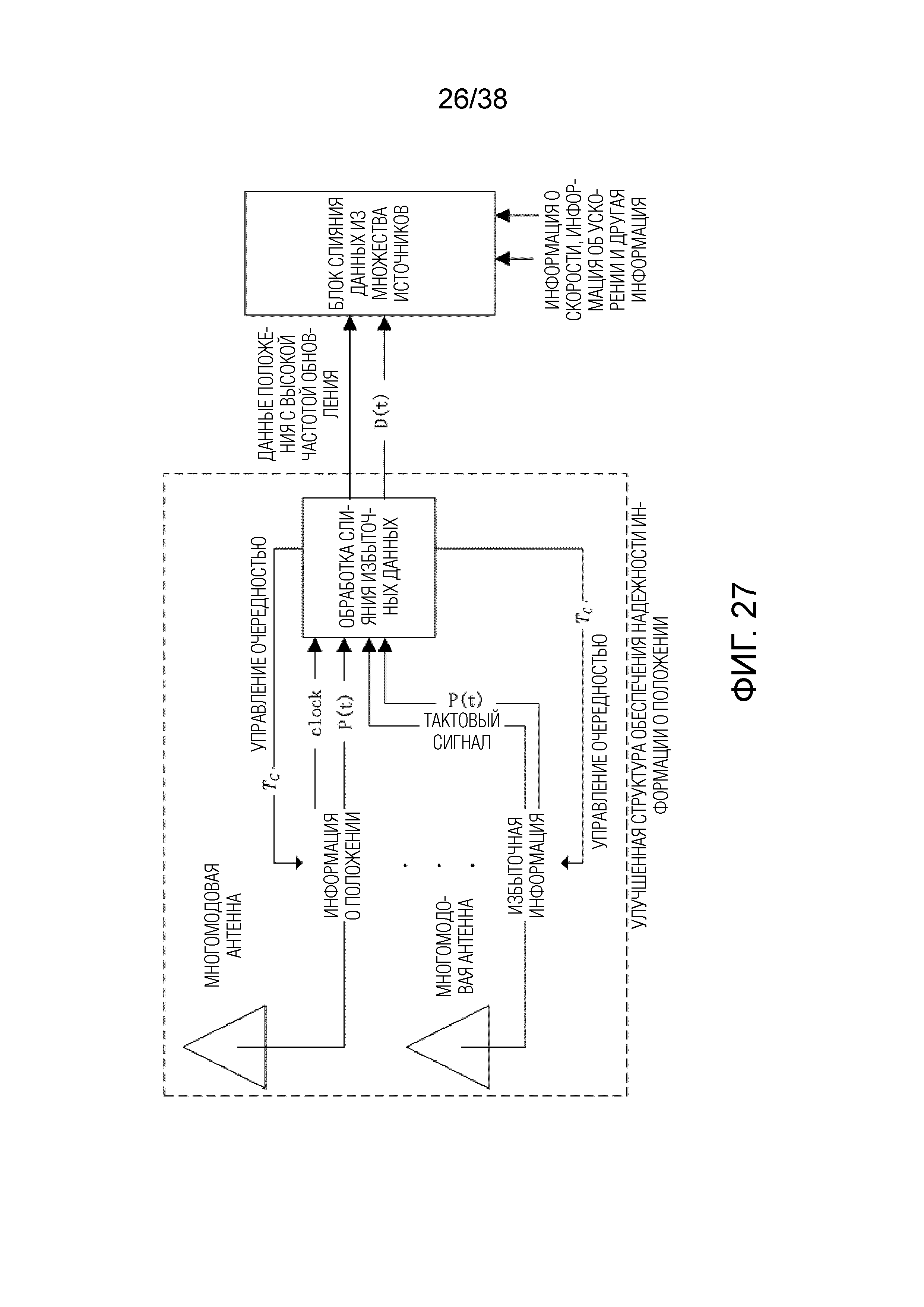
Для непрерывного определения положения предусмотрена структура обеспечения надежности обработки информации о положении. Обратимся к фиг. 27, которая является принципиальной схемой, показывающей улучшенную структуру обеспечения надежности обработки информации о положении, согласно настоящему изобретению.
Эта структура обеспечения надежности включает в себя блок обработки слияния избыточных данных, блок слияния данных из множества источников, а также соответствующие программное обеспечение и аппаратные средства. Блок обработки слияния избыточных данных выполнен с возможностью обработки избыточной информации о положении для получения информации о положении с высокой частотой обновления из избыточных данных. Блок обработки слияния данных из множества источников выполнен с возможностью комбинирования данных из других источников и коррекции полученной информации о положении.
Для непрерывного определения положения предусмотрена облачная структура обеспечения надежности получения информации о положении. Обратимся к фиг. 28, которая является принципиальной схемой, показывающей еще одну улучшенную структуру обеспечения надежности обработки информации о положении, согласно настоящему изобретению.
Эта структура обеспечения надежности включает в себя модуль алгоритма обеспечения надежности, блок слияния данных и сетевое устройство хранения. Сетевое устройство хранения выполнено с возможностью хранения информации о дорожной сети и информации для планирования. Модуль алгоритма обеспечения надежности выполнен с возможностью разрешения информации о положении. Блок слияния данных выполнен с возможностью проверки и коррекции информации о положении с использованием имеющейся в распоряжении информации из других источников.
Для непрерывного определения положения, предусмотрена улучшенная структура обработки информации об угловой скорости и информации об ускорении. Обратимся к фиг. 29, которая является принципиальной схемой, показывающей улучшенную структуру обработки информации о скорости и информации об ускорении, согласно настоящему изобретению.
В этой структуре, учитывается информация об угловой скорости, ускорении, электромагнитной силе и атмосферном давлении, и тому подобном. Датчик выполнен с возможностью выполнения измерения данных. Интерфейсный модуль выполнен с возможностью считывания данных. Модуль обработки сигналов выполнен с возможностью обработки данных и разрешения положения.
Для непрерывного определения положения, предусмотрена структура обеспечения надежности получения информации о положении. Обратимся к фиг. 30, которая является принципиальной схемой, показывающей улучшенную структуру обеспечения надежности получения информации о положении, основанную на алгоритме обеспечения надежности, согласно настоящему изобретению.
Эта структура включает в себя измерительный датчик, блок совместной обработки, блок хранения и блок алгоритма обеспечения надежности информации о положении. Блок совместной обработки выполнен с возможностью получения информации из множества источников и записи информации из множества источников в блок хранения в реальном времени. Блок алгоритма обеспечения надежности информации о положении выполнен с возможностью считывания данных и изменения разрешения информации о положении параллельно в реальном времени.
В соответствии со способом, описанным в вышеприведенных вариантах осуществления, в настоящем изобретении дополнительно предусмотрено устройство для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения. Обратимся к фиг. 31, которая является принципиальной структурной схемой, показывающей устройство для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению. Устройство включает в себя процессор 1 сигнала инерциальной навигации, процессор 2 сигнала коррекции и процессор 3 слияния данных.
Процессор 1 сигнала инерциальной навигации выполнен с возможностью обнаружения данных инерциальной навигации из источника сигнала инерциальной навигации, размещенного в поезде.
Следует понимать, что для выполнения измерения скорости в реальном времени и непрерывного определения положения требуется заблаговременно организовать множество независимых источников сигнала, каждый из которых реализован специализированной микросхемой.
Процессор 1 сигнала инерциальной навигации стабильно размещен в высокоскоростном поезде строго в требуемом осевом направлении. Требуется защитить процессор 1 сигнала инерциальной навигации от пыли и влаги. Процессор 1 сигнала инерциальной навигации принимает данные инерциальной навигации из источника сигнала инерциальной навигации. Данные инерциальной навигации включают в себя информацию об ускорении, информацию об угловой скорости, и тому подобное. После приема данных инерциальной навигации процессор 1 сигнала инерциальной навигации может выполнять первичное определение достоверности и приводить в исполнение алгоритм слияния данных для обеспечения надежности на основании данных коррекции, полученных процессором 2 сигнала коррекции, для получения множества выходных данных по умолчанию и выходных данных решения по скоростям и положениям, и передавать выходные данные по умолчанию и выходные данные решения по скоростям и положениям в процессор 3 слияния данных.
Процессор 2 сигнала коррекции выполнен с возможностью обнаружения данных коррекции из источника сигнала коррекции. Источник сигнала коррекции включает в себя источник спутникового сигнала, размещенный в поезде. Данные коррекции включают в себя спутниковые данные. Процессор 2 сигнала коррекции включает в себя процессор спутникового сигнала.
Процессор 2 сигнала коррекции размещен в высокоскоростном поезде. Высокоскоростной поезд дополнительно оснащен антенной, которая выполнена с возможностью приёма спутникового сигнала и выполнения первичного определения достоверности и исполнения алгоритма слияния данных для обеспечения надежности над принятой информацией о положении, для получения множества выходных данных по умолчанию и выходных данных решения по скоростям и положениям, и передачи выходных данных по умолчанию и выходных данных решения по скоростям и положениям в процессор 3 слияния данных.
Процессор 3 слияния данных выполнен с возможностью определения в случае, если данные коррекции не обнаружены, текущей скорости и текущего положения поезда на основании данных инерциальной навигации; и коррекции в случае, если данные коррекции обнаружены, данных инерциальной навигации с использованием данных коррекции, и определения текущей скорости и текущего положения поезда на основании скорректированных данных инерциальной навигации.
Процессор 3 слияния данных размещен в высокоскоростном поезде и выполнен с возможностью приёма данных из процессора 2 сигнала коррекции и процессора 1 сигнала инерциальной навигации в реальном времени и обработки данных коррекции и данных инерциальной навигации с помощью алгоритма слияния данных для получения окончательного и производимого в реальном времени результата измерения скорости и определения положения. Согласно настоящему изобретению, предусмотрено устройство для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения, которое включает в себя процессор 1 сигнала инерциальной навигации, процессор 2 сигнала коррекции и процессор 3 слияния данных. Процессор 1 сигнала инерциальной навигации выполнен с возможностью обнаружения данных инерциальной навигации из источника сигнала инерциальной навигации, размещенного в поезде. Процессор 2 сигнала коррекции выполнен с возможностью обнаружения данных коррекции из источника сигнала коррекции. Источник сигнала коррекции включает в себя источник спутникового сигнала, размещенный в поезде. Данные коррекции включают в себя спутниковые данные. Процессор 2 сигнала коррекции включает в себя процессор спутникового сигнала. Процессор 3 слияния данных выполнен с возможностью: определения текущей скорости и текущего положения поезда на основании данных инерциальной навигации в случае, если данные коррекции не обнаружены; или коррекции данных инерциальной навигации с использованием данных коррекции и определения текущей скорости и текущего положения поезда на основании скорректированных данных инерциальной навигации в случае, если данные коррекции обнаружены.
Из настоящего изобретения может быть видно, что обнаруживаются как данные инерциальной навигации, так и данные коррекции, а образ действия для получения текущей скорости и текущего положения поезда определяется с учётом данных инерциальной навигации в качестве исходных данных, в зависимости от результата обнаружения данных коррекции. В случае, если данные коррекции обнаружены, измерение скорости в реальном времени и непрерывное определение положения могут выполняться надежно и достоверно на основании данных коррекции и данных инерциальной навигации. Даже в случае, если данные коррекции не обнаружены, измерение скорости в реальном времени и непрерывное определение положения могут выполняться надежно и достоверно на основании данных инерциальной навигации. Таким образом могут достигаться высокие стабильность, надежность и точность.
Предпочтительно, процессор 2 сигнала коррекции дополнительно включает в себя процессор внешнего сигнала. Соответственно, в случае, если спутниковые данные не обнаружены, процессор 3 слияния данных выполнен с возможностью коррекции данных инерциальной навигации с использованием данных коррекции посредством выполнения следующих этапов: коррекции данных скорости в данных инерциальной навигации с использованием данных скорости из источника статорного полюсного сигнала, и/или коррекции данных положения в данных инерциальной навигации с использованием данных положения от индукционного кодового датчика положения. В случае, если спутниковые данные обнаружены, процессор 3 слияния данных выполнен с возможностью коррекции данных инерциальной навигации с использованием данных коррекции посредством выполнения следующих этапов: коррекции данных скорости в данных инерциальной навигации с использованием данных скорости из источника статорного полюсного сигнала и спутниковых данных, и/или коррекции данных положения в данных инерциальной навигации с использованием данных положения от индукционного кодового датчика положения и из спутниковых данных.
Процессор внешнего сигнала присоединен к различным источникам сигнала скорости и источникам сигнала положения, скомпонованным в поезде, через наборы разъемов и принимает информацию о скорости и информацию о положении, и выполняет анализ достоверности и процесс слияния данных над принятой информацией о скорости и информацией о положении, для получения множества выходных данных по умолчанию и выходных данных решения о скоростях и положениях, и передает выходные данные по умолчанию и выходные данные решения о скоростях и положениях в процессор 3 слияния данных. Источником сигнала скорости может быть источник статорного полюсного сигнала, а источником сигнала положения может быть индукционный кодовый датчик положения.
В дополнение, источник статорного полюсного сигнала и индукционный кодовый датчик положения могут упоминаться как источники внешнего сигнала.
Предпочтительно, устройство дополнительно включает в себя процессор связи, выполненный с возможностью передачи текущей скорости и текущего положения. Процессор связи принимает надежную информацию о скорости в реальном времени и непрерывную информацию о скорости из процессора 3 слияния данных и кодирует принятую надежную информацию о скорости в реальном времени и непрерывную информацию о скорости в ответ на запрос с внешнего устройства, и передает кодированную надежную информацию о скорости в реальном времени и непрерывную информацию о скорости в схему интерфейса связи, тем самым, осуществляя совместное использование данных.
Устройство для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению описано ниже в комбинации со следующим примером, который включает в себя нижеследующие этапы с 1 по 3.
На этапе 1, заблаговременно организовано двенадцать независимых источников сигнала для выполнения измерения скорости в реальном времени и непрерывного определения положения. Обратимся к фиг. 32, которая является принципиальной схемой, показывающей принцип для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения, основанного на двенадцати источниках сигналов, согласно настоящему изобретению. На фиг. 32:
Источник X1 сигнала является навигационной спутниковой системой BeiDou и выполнен с возможностью выполнения измерения скорости в реальном времени и непрерывного определения положения;
Источник X2 сигнала является навигационной спутниковой системой GPS и выполнен с возможностью выполнения измерения скорости в реальном времени и непрерывного определения положения;
Источник X3 сигнала является навигационной спутниковой системой GLONASS и выполнен с возможностью выполнения измерения скорости в реальном времени и непрерывного определения положения;
Источник X4 сигнала является навигационной спутниковой системой Galileo и выполнен с возможностью выполнения измерения скорости в реальном времени и непрерывного определения положения;
Источник X5 сигнала является инерциальной навигационной системой A и выполнен с возможностью выполнения измерения скорости в реальном времени и непрерывного определения положения;
Источник X6 сигнала является инерциальной навигационной системой B и выполнен с возможностью выполнения измерения скорости в реальном времени и непрерывного определения положения;
Источник X7 сигнала является инерциальной навигационной системой C и выполнен с возможностью выполнения измерения скорости в реальном времени и непрерывного определения положения;
Источник X8 сигнала является инерциальной навигационной системой D и выполнен с возможностью выполнения измерения скорости в реальном времени и непрерывного определения положения;
Источник X9 сигнала является источником A статорного полюсного сигнала и выполнен с возможностью выполнения измерения скорости в реальном времени;
Источник X10 сигнала является источником B статорного полюсного сигнала и выполнен с возможностью выполнения измерения скорости в реальном времени;
Источник X11 сигнала является источником A сигнала индукционного кодового датчика положения и выполнен с возможностью выполнения коррекции над непрерывным определением положения; и
Источник X12 сигнала является источником B сигнала индукционного кодового датчика положения и выполнен с возможностью выполнения коррекции над непрерывным определением положения.
На этапе 2 двенадцать независимых источников сигнала для выполнения измерения скорости в реальном времени и непрерывного определения положения организуются для формирования множества структур обеспечения надежности выбором двух из трех, множества структур обеспечения надежности парой из двух двоек согласно принципу структуры обеспечения надежности, для получения достоверных источников сигнала, комбинированных на основании стратегии самоприспосабливающейся комбинации структур обеспечения надежности, для получения шестнадцати исходных выходных данных и шестнадцати выходных данных решения о скоростях в реальном времени и непрерывных положениях с использованием алгоритма обеспечения надежности с множеством источников.
Более конкретно, обратимся к фиг. 33, которая является принципиальной схемой, показывающей структуру обеспечения надежности выбором двух из трех, включающую в себя множество источников спутникового сигнала, согласно настоящему изобретению. Как показано на фиг. 33, источники X1, X2, X3 и X4 сигнала выполнены с возможностью формирования четырех структур обеспечения надежности выбором двух из трех, то есть X1&X2&X3, X2&X3&X4, X3&X4&X1 и X4&X1&X2.
Обратимся к фиг. 34, которая является принципиальной схемой, показывающей структуру обеспечения надежности выбором двух из трех, включающую в себя множество источников сигнала инерциальной навигации согласно настоящему изобретению. Как показано на фиг. 34, источники X5, X6, X7 и X8 сигнала организованы для формирования четырех структур обеспечения надежности выбором двух из трех, то есть X5&X6&X7, X6&X7&X8, X7&X8&X5 и X8&X5&X6.
Обратимся к фиг. 35, которая является принципиальной схемой, показывающей структуру обеспечения надежности парой из двух двоек, включающую в себя множество источников внешнего сигнала, согласно настоящему изобретению. Как показано на фиг. 35, источники X9, X10, X11 и X12 организованы, чтобы формировать одну структуру обеспечения надежности парой из двух двоек, то есть, X9&X11+X10&X12.
Обратимся к фиг. 36, которая является принципиальной схемой, показывающей структуру обеспечения надежности выбором двух из трех, включающую в себя множество источников спутникового сигнала и множество источников внешнего сигнала, согласно настоящему изобретению. Как показано на фиг. 36, источники X1, X2, X3, X4, X9 и X11 сигнала организованы для формирования четырех структур обеспечения надежности выбором двух из трех, то есть X1&X2&(X9&X11), X2&X3&(X9&X11), X3&X4&(X9&X11) и X4&X1&(X9&X11).
Обратимся к фиг. 37, которая является принципиальной схемой, показывающей структуру обеспечения надежности выбором двух из трех, включающую в себя множество источников сигнала инерциальной навигации и множество источников внешнего сигнала, согласно настоящему изобретению. Как показано на фиг. 37, источники X1, X2, X3, X4, X10 и X12 сигнала выполнены с возможностью формирования четырех структур обеспечения надежности выбором двух из трех, то есть X1&X2&(X10&X12), X2&X3&(X10&X12), X3&X4&(X10&X12), X4&X1&(X10&X12).
На этапе 3, на основании этапа 1 и этапа 2, вторичное определение выполняется над полученными шестнадцатью выходными данными по умолчанию и шестнадцатью выходными данными решения посредством алгоритма слияния в комбинации с выходными данными по умолчанию и выходными данными решения из источников внешнего сигнала, чтобы выдавать окончательные скорость в реальном времени и непрерывное положение поезда с признаками обеспечения надежности.
Что касается описания устройства для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению, можно обратиться к вышеприведенным вариантам осуществления способа, которые в материалах настоящей заявки не повторяются.
Согласно настоящему изобретению, дополнительно предусмотрена система для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения, соответствующая способу и устройству, описанным выше. Система включает в себя источник сигнала инерциальной навигации, источник сигнала коррекции и вышеприведенное устройство для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения.
Предпочтительно, количество источников сигнала инерциальной навигации имеет значение больше одного, и более одного источников сигнала инерциальной навигации выполнены с возможностью формирования структур обеспечения надежности выбором двух из трех. Количество источников спутникового сигнала имеет значение больше одного, и более одного источников спутникового сигнала выполнены с возможностью формирования структуры обеспечения надежности выбором двух из трех.
Предпочтительно, количество источников сигнала инерциальной навигации имеет значение четыре, и количество источников спутникового сигнала имеет значение четыре.
Предпочтительно, четыре источника спутникового сигнала реализованы соответственно микропроцессорным набором для спутников BeiDou, микропроцессорным набором для спутников GPS, микропроцессорным набором для спутников GLONASS и микропроцессорным набором для спутников Galileo.
Обратимся к фиг. 38, которая является принципиальной структурной схемой, показывающей систему для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению.
Система для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению размещена в высокоскоростном поезде. В случае, если высокоскоростной поезд находится в эксплуатационном состоянии, система запускается, и выполняется процесс инициализации системы. В этом случае, в случае, если спутниковые сигналы имеются в распоряжении, процессор спутникового сигнала исследует источники спутникового сигнала для выбора источника спутникового сигнала, имеющего мощные сигналы. Данные обрабатываются посредством первичного анализа и обработки, а затем, передаются в процессор слияния данных через интерфейс. Процессор сигнала инерциальной навигации обнаруживает информацию об ориентации поезда, такую как информация о положении и информация об ускорении, и передает информацию, обработанную посредством первичного анализа и обработки, в процессор слияния данных через интерфейс. Процессор внешнего сигнала проверяет и анализирует принятые информацию о скорости и информацию о положении и передает данные, которые определены достоверными, в процессор слияния данных. Процессор принимает данные из процессора спутникового сигнала, процессора сигнала инерциальной навигации и процессора внешнего сигнала, и выполняет алгоритмический расчет выбора и слияния над данными с использованием алгоритма интеллектуальных итерационных правок исходного маршрута, и корректирует данные с использованием спутниковых данных и опираясь на данные инерциальной навигации.
Маршруты для высокоскоростных поездов характеризуются множеством туннелей, в которых система не может принимать спутниковые сигналы, таким образом определение положения и измерение скорости выполняются только процессором сигнала инерциальной навигации. В этом случае, поскольку нет спутниковых данных, используемых для коррекции данных инерциальной навигации в реальном времени, процессор сигнала инерциальной навигации не может выполнять измерение точно вследствие накопления погрешности. Поэтому, требуется корректировать погрешность измерения в реальном времени на основании существующих условий.
Новый алгоритм слияния итерационных правок исходного маршрута, основанный на методе гибридного сопряжения, который перенят согласно настоящему изобретению, описан в материалах настоящей заявки в качестве примера. Обратимся к фиг. 39, которая является принципиальной схемой, показывающей принцип алгоритма слияния итерационных правок исходного маршрута согласно настоящему изобретению.
Метод гибридного сопряжения имеет те же самые признаки небольшого объема вычислений и простой структуры, что и метод свободного сопряжения, и также достигает преимуществ метода жесткого сопряжения, при котором точность прогнозирования и отслеживания маршрута обеспечивается даже в случае слабого спутникового сигнала. В нормальных условиях, сигнал инерциальной навигации имеет нормальное разрешение, и информация о положении и информация о скорости выдаются непосредственно, а ошибка инерциальной навигации корректируется посредством использования спутникового сигнала. В случае, если поезд едет в гористой местности или в зоне со слабым спутниковым сигналом, псевдодальность и скорость изменения псевдодальности поезда относительно спутника рассчитываются с использованием эфемеридных параметров и параметрами инерциальной навигации, а информация о скорости и информация о положении получаются посредством метода калмановской фильтрации. В случае, если поезд едет через тоннель, спутниковый сигнал не обнаруживается, текущий маршрут поезда служит в качестве исходного маршрута и сохраняется. Маршрут инерциальной навигации получается с определенной частотой и сравнивается с исходным маршрутом. Несовпадение между маршрутом инерциальной навигации и исходным маршрутом корректируется на основании итерационного правила, так что накопленная ошибка постоянно корректируется и устраняется.
Что касается описания системы для надежного и достоверного выполнения измерения скорости в реальном времени и непрерывного определения положения согласно настоящему изобретению, можно обратиться к вышеприведенным вариантам осуществления способа и устройства, которые в материалах настоящей заявки не повторяются.
Должно быть отмечено, что термины «включают в себя», «содержат» или любые другие варианты в настоящем изобретении подразумеваются неисключительными. Поэтому, процесс, способ, изделие или устройство, включающие в себя ряд элементов, включают в себя не только эти элементы, но также и другие элементы, которые не пронумерованы, или также включают в себя элементы, неотъемлемые применительно к процессу, способу, изделию или устройству. Если не ограничено в прямой форме иным образом, выражение «содержащий (включающий в себя) один...» не исключает случая, в котором другие подобные элементы могут существовать в процессе, способе, изделии или устройстве.
С описанием вариантов осуществления, раскрытых выше, специалисты в данной области техники могут реализовать или использовать технические решения настоящего изобретения. Множество модификаций в отношении вариантов осуществления очевидны специалистам в данной области техники, а общие принципы, определенные в материалах настоящей заявки, могут быть реализованы в других вариантах осуществления, не выходящих за рамки сущности или объема настоящего изобретения. Поэтому настоящее изобретение может не ограничиваться вариантами осуществления, описанными в материалах настоящей заявки, но должно соответствовать наиболее широкому объему, соответствующему принципам и новым признакам, раскрытым в материалах настоящей заявки.
Реферат
Предложены способ, устройство и система для измерения скорости в реальном времени и непрерывного определения положения, содержащие: обнаружение данных инерциальной навигации, выдаваемых источником сигнала инерциальной навигации, расположенным на поезде; обнаружение данных коррекции, выдаваемых источником модифицированного сигнала, причём источник модифицированного сигнала содержит источник спутникового сигнала, расположенный на поезде, а данные коррекции содержат спутниковые данные; если данные коррекции потеряны, определение текущих скорости и положения поезда с использованием данных инерциальной навигации; иначе, использование данных коррекции для коррекции данных инерциальной навигации и определение текущих скорости и положения поезда согласно скорректированным данным инерциальной навигации. Данные инерциальной навигации и скорректированные данные учитываются одновременно. Когда данные коррекции не потеряны, измерение скорости в реальном времени и непрерывное определение положения могут успешно выполняться посредством данных коррекции и данных инерциальной навигации; даже если данные коррекции потеряны, измерение скорости в реальном времени и непрерывное определение положения могут осуществляться с использованием данных инерциальной навигации, и обеспечиваются высокие стабильность, надежность и точность. 3 н. и 12 з.п. ф-лы, 39 ил.
Комментарии