Способ определения курса беспилотного летательного аппарата и беспилотный летательный аппарат - RU2717703C1
Код документа: RU2717703C1
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к области беспилотных летательных аппаратов и, более конкретно, к способу определения курса беспилотного летательного аппарата и к беспилотному летательному аппарату.
Уровень техники
Для достижения автономного перемещения, нужно получать положение и курс беспилотного летательного аппарата. Положение беспилотного летательного аппарата, в общем, получают с помощью глобальной системы (GPS) позиционирования, курс беспилотного летательного аппарата, в общем, получают с помощью объединения электронного компаса и инерциального измерительного блока (IMU) или данные курса измеряют на основе системы (RTK) кинематики в режиме реального времени.
Электронный компас склонен к ошибкам в курсе из-за помех. Помехи электронного компаса делятся на два вида: в одном случае беспилотный летательный аппарат внезапно попадает в сильное магнитное поле, например, внезапно приближается к сильному магниту, в этот момент измеренный курс резко испытывает сильное скачкообразное изменение, и в этом случае легко определяется, что курс некорректный; в другом случае беспилотный летательный аппарат медленно приближается к вулкану или шахте (вулкан или шахта обладают магнетизмом: существует магнитное поле и, по мере приближения к кратеру, усиливается магнитное поле), в этом случае трудно сделать вывод на основе данных инерциальной навигации и данных электронного компаса; когда для измерения курса используется RTK с двойной антенной, при наличии нескольких спутников, точность измерений низкая, шум велик и, если данные местоположения не могут быть переданы в систему RTK, невозможно определить курс.
С учетом проблемы предшествующего уровня техники, когда угол курса измеряют с использованием электронного компаса или способа RTK, до сих пор не было предложено эффективного решения проблемы некорректного измеренного курса беспилотного летательного аппарата из-за помех и других факторов.
Краткое изложение
В вариантах осуществления настоящего изобретения предложен способ определения курса беспилотного летательного аппарата и беспилотный летательный аппарат, которые предназначены для решения технической проблемы, которая заключается в том, что, когда угол курса измеряют с использованием электронного компаса или способа RTK, имеет место неправильно измеренный курс беспилотного летательного аппарата из-за помех и других факторов.
В соответствии с одним аспектом варианта осуществления изобретения, предложен способ определения курса беспилотного летательного аппарата. Этот способ может включать в себя следующее: первый угол курса беспилотного летательного аппарата получают с помощью первой системы измерения, и второй угол курса беспилотного летательного аппарата получают с помощью второй системы измерения; определяют угол сходимости между первым курсом, который соответствует первому углу курса, и вторым курсом, который соответствует второму углу курса; и угол сходимости сравнивают с заранее заданным пороговым значением, таким образом, получают результат сравнения; оценивают, является ли второй угол курса допустимым в соответствии с результатом сравнения; и если второй угол курса является недопустимым, то первый угол курса определяют в качестве текущего угла курса беспилотного летательного аппарата. В соответствии с другим аспектом варианта осуществления изобретения, предложен носитель информации. Носитель информации может отличаться тем, что содержит сохраненную программу, причем эту программу исполняют с целью такого управления носителем информации, чтобы осуществлять способ определения курса беспилотного летательного аппарата.
В соответствии с другим аспектом варианта осуществления изобретения, также предложен процессор. Процессор может быть выполнен с возможностью исполнения программы, причем эту программу исполняют с целью осуществления способа определения курса беспилотного летательного аппарата.
В соответствии с другим аспектом варианта осуществления изобретения, также предложен беспилотный летательный аппарат. Беспилотный летательный аппарат может содержать центр управления полетом, при этом центр управления полетом содержит контроллер полета, первую систему измерения, вторую систему измерения и систему связи; первая система измерения выполнена с возможностью получения первого угла курса беспилотного летательного аппарата и передачи информации о первом угле курса на контроллер полета; вторая система измерения выполнена с возможностью получения второго угла курса беспилотного летательного аппарата и передачи информации о втором угле курса на контроллер полета; контроллер полета содержит носитель информации, который выполнен с возможностью сохранения программы, при этом программу исполняют для осуществления следующего: получают первый угол курса беспилотного летательного аппарата с помощью первой системы измерения, получают второй угол курса беспилотного летательного аппарата с помощью второй системы измерения, определяют угол сходимости между первым курсом, который соответствует первому углу курса, и вторым курсом, который соответствует второму углу курса, сравнивают угол сходимости с заранее заданным пороговым значением, оценивают, является ли второй угол курса допустимым в соответствии с результатом сравнения, оценивают, является ли второй угол курса допустимым в соответствии с результатом сравнения, и если второй угол курса является недопустимым, определяют первый угол курса в качестве текущего угла курса беспилотного летательного аппарата; и система связи выполнена с возможностью передачи информации между контроллером полета, первой системой измерения и второй системой измерения.
В вариантах осуществления изобретения, текущий первый угол курса беспилотного летательного аппарата получают с помощью первой системы измерения, а текущий второй угол курса беспилотного летательного аппарата получают с помощью второй системы измерения; оценивают, является ли второй угол курса допустимым в соответствии с результатом сравнения; и если второй угол курса является недопустимым, то первый угол курса определяют в качестве текущего угла курса беспилотного летательного аппарата. Достигаются цели определения того, является ли допустимым второй угол курса, полученный с помощью второй системы измерения, и замены второго угла курса первым углом курса, который получен с использованием первой системы измерения, когда второй угол курса является недопустимым, таким образом достигаются технические эффекты гарантирования точности курса беспилотного летательного аппарата, улучшения безопасности и надежности беспилотного летательного аппарата и исключения опасности для беспилотного летательного аппарата, что делает полет беспилотного летательного аппарата безопасным и стабильным. Таким образом, решают техническую проблему уровня техники, которая заключается в том, что, когда угол курса измеряют с использованием электронного компаса или способа RTK, имеет место неправильно измеренный курс беспилотного летательного аппарата из-за помех и других факторов.
Краткое описание чертежей
Приложенные к настоящему документу чертежи используют для обеспечения дополнительного понимания изобретения, и они составляют часть настоящей заявки, и примеры вариантов осуществления изобретения и описание изобретения используют для объяснения изобретения, но они не являются ограничениями для изобретения. На чертежах:
фиг. 1 - схема операций способа определения курса беспилотного летательного аппарата в соответствии с одним вариантом осуществления настоящего изобретения;
фиг. 2 - схема системы координат в соответствии с одним вариантом осуществления настоящего изобретения;
фиг. 3 - схема операций альтернативного способа определения курса беспилотного летательного аппарата в соответствии с одним вариантом осуществления настоящего изобретения;
фиг. 4 - схема операций альтернативного способа определения курса беспилотного летательного аппарата в соответствии с одним вариантом осуществления настоящего изобретения;
фиг. 5 - схема устройства для определения курса беспилотного летательного аппарата в соответствии с одним вариантом осуществления настоящего изобретения; и
фиг. 6 - схема беспилотного летательного аппарата в соответствии с одним вариантом осуществления настоящего изобретения.
Подробное описание вариантов осуществления изобретения
Чтобы специалисты в рассматриваемой области поняли решения из настоящего изобретения, технические решения в вариантах осуществления изобретения будут ясно и полно описаны ниже со ссылками на чертежи вариантов осуществления изобретения. Ясно, что описанные варианты осуществления изобретения являются только частью вариантов осуществления изобретения, а не всеми вариантами осуществления изобретения. С учетом вариантов осуществления изобретения из настоящего описания, все другие варианты осуществления изобретения, полученные специалистами в рассматриваемой области без творческих усилий, должны находиться в рамках защиты настоящего изобретения.
Следует понимать, что в описании и формуле изобретения термины «первый», «второй» и подобные на чертежах используют для различения аналогичных объектов, и не нужно описывать конкретную последовательность или заданный порядок. Следует понимать, что данными, используемыми таким образом, можно обмениваться при надлежащих условиях, чтобы описанные в настоящем документе варианты осуществления изобретения можно быть реализовать в последовательности, которая отличается от последовательностей, которые графически показаны или описаны в настоящем документе. Более того, термины «содержит» и «включает в себя» и любые их вариации подразумевают неисключительное вхождение. Например, процессы, способы, системы, продукты или устройства, содержащие набор этапов или блоков, не обязательно ограничены непосредственно перечисленными этапами или блоками, а могут содержаться другие этапы или блоки, которые не перечислены явно и которые естественны для этих процессов, способов, продуктов или устройств.
Вариант 1 осуществления изобретения
В соответствии с этим вариантом осуществления изобретения, предложен вариант осуществления способа для определения курса беспилотного летательного аппарата. Следует понимать, что этапы, показанные в виде блок-схемы на фигуре, могут быть исполнены компьютерной системой, которая содержит, например, набор исполняемых компьютером команд. Более того, хотя в блок-схеме показана логическая последовательность, при определенных условиях показанные или описанные этапы могут быть исполнены в последовательности, которая отличается от последовательности, показанной здесь.
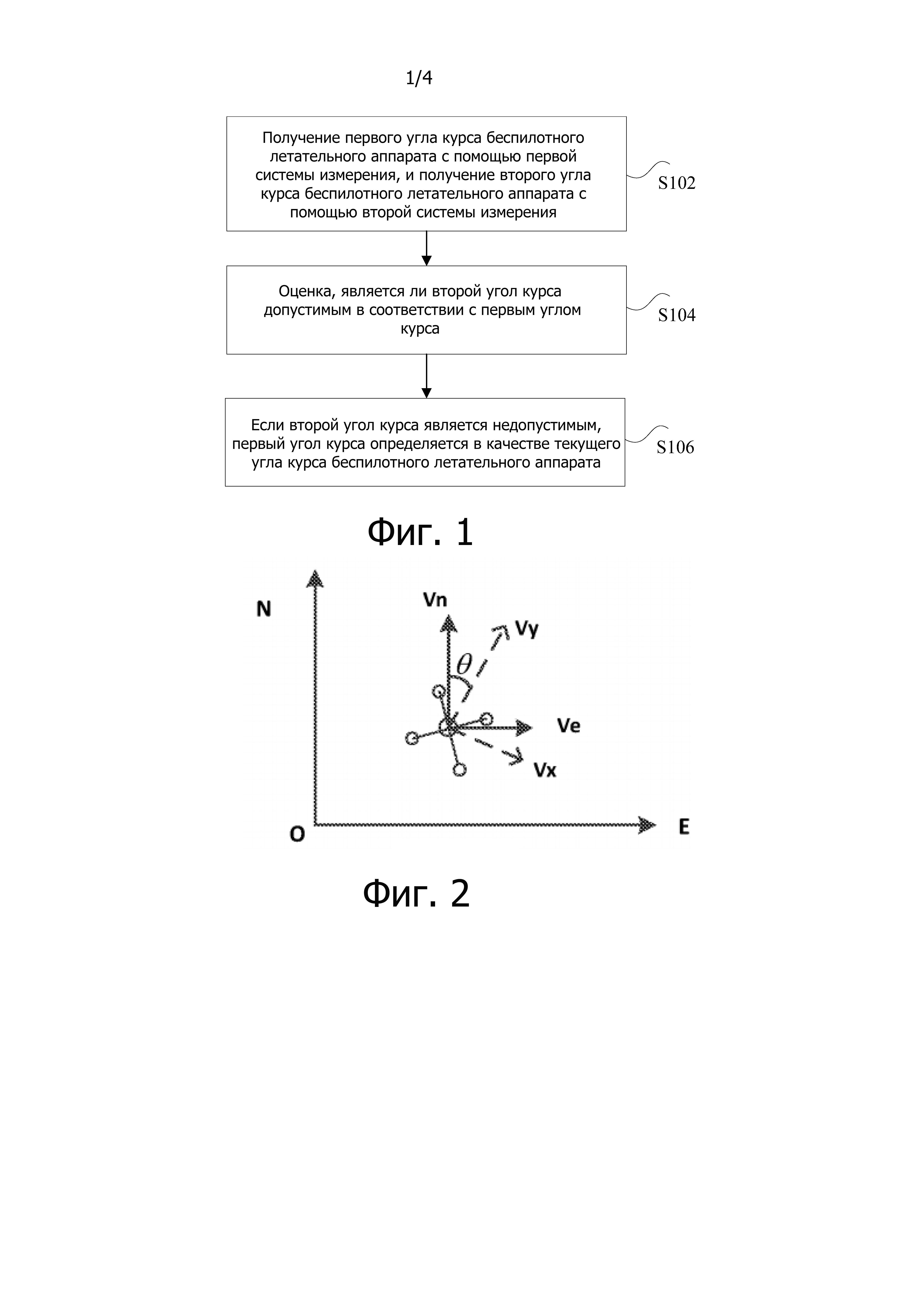
На фиг. 1 показана схема операций способа определения курса беспилотного летательного аппарата в соответствии с одним вариантом осуществления настоящего изобретения. Как показано на фиг. 1, способ включает в себя следующие этапы.
На этапе S102, первый угол курса беспилотного летательного аппарата получают с помощью первой системы измерения, и второй угол курса беспилотного летательного аппарата получают с помощью второй системы измерения.
На этапе S104, оценивают, является ли второй угол курса допустимым в соответствии с результатом сравнения.
При этом до этапа S104 определяют угол сходимости между первым курсом, который соответствует первому углу курса, и вторым курсом, который соответствует второму углу курса; и угол сходимости сравнивают с заданным пороговым значением, таким образом, получают результат сравнения.
На этапе S106, если второй угол курса является недопустимым, то первый угол курса определяют в качестве текущего угла курса беспилотного летательного аппарата.
В вариантах осуществления изобретения, первый угол курса беспилотного летательного аппарата получают с помощью первой системы измерения, а второй угол курса беспилотного летательного аппарата получают с помощью второй системы измерения; оценивают, является ли второй угол курса допустимым в соответствии с результатом сравнения; и если второй угол курса является недопустимым, то первый угол курса определяют в качестве текущего угла курса беспилотного летательного аппарата. Достигаются цели определения того, является ли допустимым второй угол курса, полученный с помощью второй системы измерения, и замены второго угла курса первым углом курса, который получен с использованием первой системы измерения, когда второй угол курса является недопустимым, таким образом достигаются технические эффекты гарантирования точности курса беспилотного летательного аппарата, улучшения безопасности и надежности беспилотного летательного аппарата и исключения опасности для беспилотного летательного аппарата, что делает полет беспилотного летательного аппарата безопасным и стабильным. Таким образом, решена техническая проблема предшествующего уровня техники, которая заключается в том, что, когда угол курса измеряют с использованием электронного компаса или способа RTK, то из-за помех и других факторов беспилотного летательного аппарата является некорректным.
В альтернативном варианте осуществления изобретения первая система измерения содержит устройство визуального определения местоположения и устройство спутникового определения местоположения, а вторая система измерения содержит устройство RTK и/или инерциальное измерительное устройство.
Более конкретно, устройство спутникового определения местоположения может быть GPS; устройство RTK может быть системой RTK, при этом система RTK может быть системой RTK с двойной антенной; инерциальное измерительное устройство может быть электронным компасом, IMU или комбинацией электронного компаса и IMU.
Следует понимать, что первая система измерения, в основном, выполнена с возможностью получения первого угла курса беспилотного летательного аппарата и, в случае, когда первая система измерения содержит устройство визуального определения местоположения и устройство спутникового определения местоположения, первый угол курса беспилотного летательного аппарата получают с помощью устройства визуального определения местоположения и устройства спутникового определения местоположения, но изобретение не ограничено применением устройства визуального определения местоположения и устройства спутникового определения местоположения в качестве единственного способа получения первого угла курса беспилотного летательного аппарата и первый угол курса беспилотного летательного аппарата также может быть получен с помощью других устройств. Аналогично, помимо устройства RTK и/или инерциального измерительного устройства, второй угол курса беспилотного летательного аппарата может быть получен с помощью других устройств.
В альтернативном варианте осуществления изобретения первая система измерения содержит первое устройство измерения курса и второе устройство измерения курса и этап получения первого угла курса беспилотного летательного аппарата с помощью первой системы измерения на этапе S102 включает в себя следующие операции.
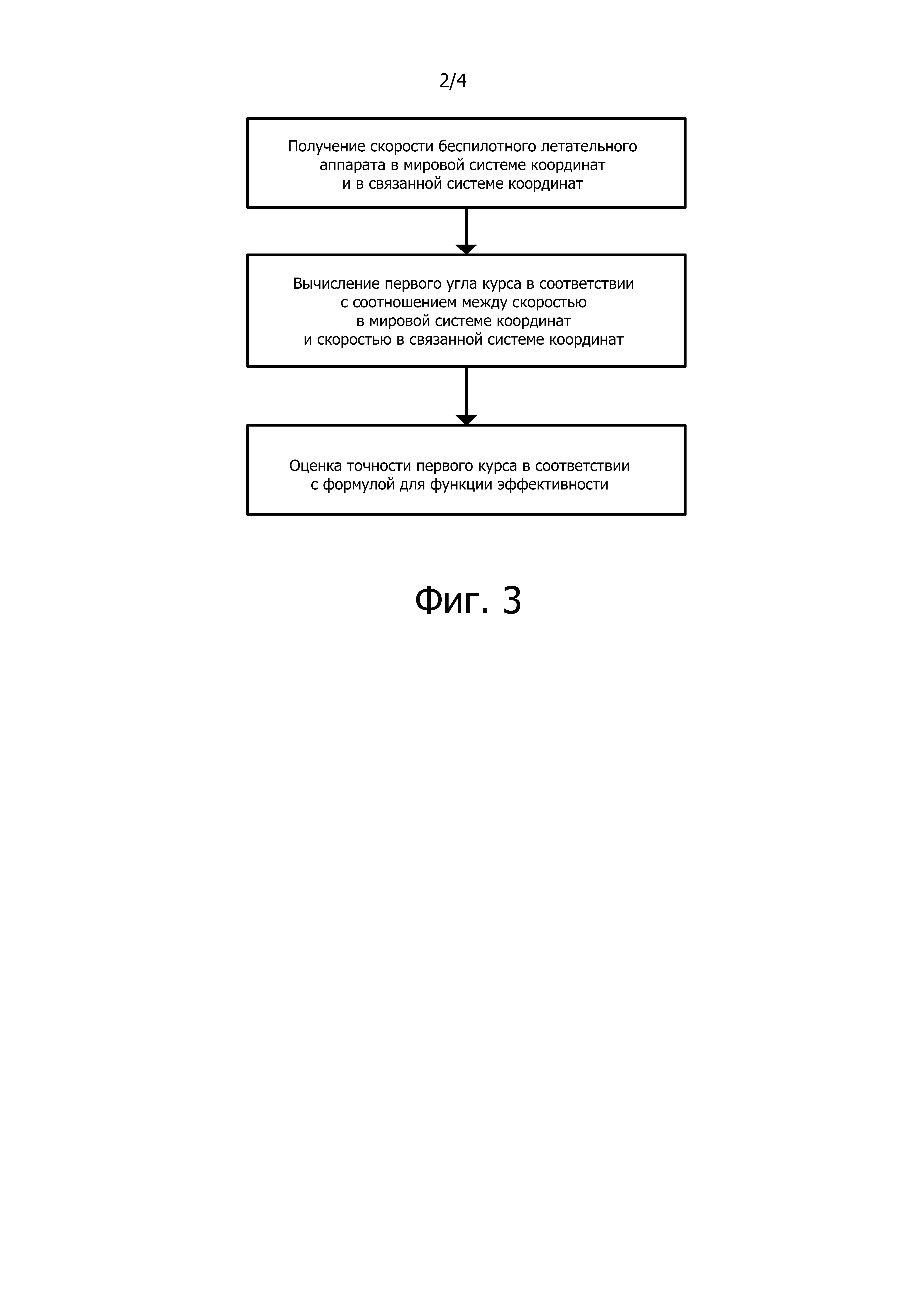
На этапе S202, скорость беспилотного летательного аппарата в мировой системе координат получают с помощью первого устройства измерения курса, и скорость беспилотного летательного аппарата в связанной системе координат получают с помощью второго устройства измерения курса.
На этапе S204 первый угол курса определяют в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат.
Более конкретно, первое устройство измерения курса может соответствовать устройству спутникового определения местоположения в предыдущем варианте осуществления изобретения, то есть скорость беспилотного летательного аппарата в мировой системе координат получают с помощью способа спутникового определения местоположения. Второе устройство измерения курса может соответствовать устройству визуального определения местоположения в предыдущем варианте осуществления изобретения, то есть скорость беспилотного летательного аппарата в связанной системе координат получают с помощью визуального способа.
Более конкретно, скорость беспилотного летательного аппарата в мировой системе координат, которая получена с помощью первого устройства измерения курса, может содержать скорость в направлении на север и скорость в направлении на восток беспилотного летательного аппарата в мировой системе координат. Скорость беспилотного летательного аппарата в связанной системе координат, которая получена с помощью второго устройства измерения курса, может содержать скорость беспилотного летательного аппарата в направлении оси х и скорость беспилотного летательного аппарата в направлении оси y в связанной системе координат.
В альтернативном варианте осуществления изобретения этап определения первого угла курса в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат на этапе S204 включает в себя следующие операции.
На этапе S302 значение первой тригонометрической функции определяют в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат.
На этапе S304 значение второй тригонометрической функции определяют в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат.
На этапе S306 первый угол курса определяют в соответствии со значением первой тригонометрической функции и значением второй тригонометрической функции.
Более конкретно, если значение первой тригонометрической функции является значением синуса, значение второй тригонометрической функции является значением косинуса, скорость беспилотного летательного аппарата в мировой системе координат может содержать скорость в направлении на север и скорость в направлении на восток беспилотного летательного аппарата в мировой системе координат, а скорость беспилотного летательного аппарата в связанной системе координат может содержать скорость беспилотного летательного аппарата в направлении оси х и скорость в направлении оси y в связанной системе координат, тогда существует определенная зависимость между скоростью беспилотного летательного аппарата в мировой системе координат, скоростью беспилотного летательного аппарата в связанной системе координат и первым углом курса, которая может быть выражена следующей формулой (1):
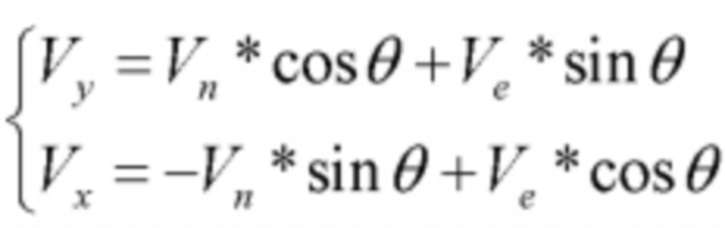
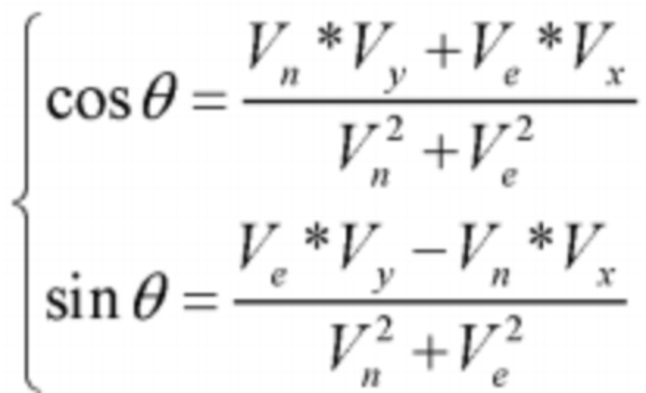
Как показано на фиг. 2, WNOE представляет мировую систему координат, Vn представляет скорость беспилотного летательного аппарата в направлении на север в мировой системе координат, Ve представляет скорость беспилотного летательного аппарата в направлении на восток в мировой системе координат, Vx представляет скорость беспилотного летательного аппарата в направлении оси х в связанной системе координат, Vy представляет скорость беспилотного летательного аппарата в направлении оси y в связанной системе координат и θ представляет первый угол курса, то есть угол сходимости между направлением корпуса беспилотного летательного аппарата и направлением на север, при этом Vn, Ve, Vx и Vy являются известными переменными, а θ является неизвестной переменной. После преобразования приведенной выше формулы (1), может быть получена приведенная ниже формула (2):
В альтернативном варианте осуществления изобретения этап определения первого угла курса в соответствии со значением первой тригонометрической функции и значением второй тригонометрической функции на этапе S306 включает в себя следующие операции.
На этапе S402 оценивают, являются ли допустимыми значение первой тригонометрической функции и значение второй тригонометрической функции.
На этапе S404, если значение первой тригонометрической функции и значение второй тригонометрической функции являются допустимыми, первый угол вычисляют в соответствии со значением первой тригонометрической функции, а второй угол вычисляют в соответствии со значением второй тригонометрической функции.
На этапе S406, вычисляют взвешенное среднее первого угла и второго угла в соответствии с заранее заданными весами первого угла и второго угла, и взвешенное среднее определяют как первый угол курса.
Более конкретно, когда значение первой тригонометрической функции и значение второй тригонометрической функции являются допустимыми, первый угол, который вычислен в соответствии с значением первой тригонометрической функции при идеальных условиях, и второй угол, который вычислен в соответствии со значением второй тригонометрической функции, должны быть равны и могут быть использованы в качестве первого угла курса, но так как шум присутствует в скорости беспилотного летательного аппарата в мировой системе координат и скорости беспилотного летательного аппарата в связанной системе координат в ходе фактических измерений, первый угол, вычисленный в соответствии со значением первой тригонометрической функции, не равен второму углу, вычисленному в соответствии со значением второй тригонометрической функции. Когда получают первый угол курса, то, чтобы сделать результат вычисления первого угла курса более точным, в настоящем варианте осуществления изобретения заранее задают веса, соответствующие первому углу и второму углу, и в качестве первого угла курса берут взвешенное среднее первого угла и второго угла. Здесь следует понимать, что заранее заданные веса, соответствующие первому углу и второму углу, могут быть оптимизированы в соответствии с фактическими условиями.
В качестве альтернативы, если значение первой тригонометрической функции представляет собой значение синуса, значение второй тригонометрической функции представляет собой значение косинуса, то скорость беспилотного летательного аппарата в мировой системе координат может содержать скорость в направлении на север и скорость в направлении на восток беспилотного летательного аппарата в мировой системе координат, и скорость беспилотного летательного аппарата в связанной системе координат может содержать скорость беспилотного летательного аппарата в направлении оси х и скорость в направлении оси y в связанной системе координат, то приведенная выше формула (2) может быть дополнительно преобразована в следующую формулу (3):
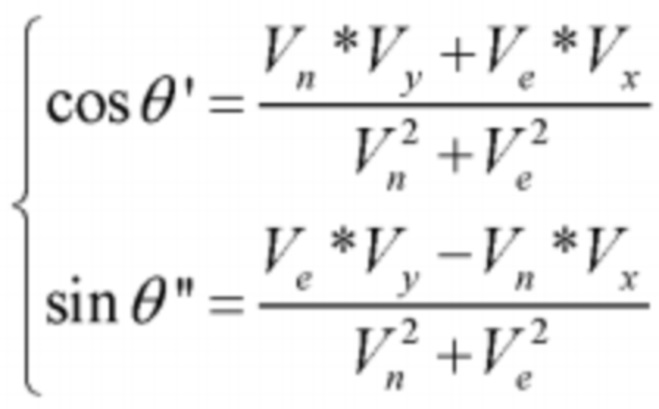
В приведенной выше формуле (3), θ' представляет второй угол, θ'' представляет первый угол, соответствующие θ' и θ'' могут быть получены с помощью арксинуса и арккосинуса и, когда заранее заданные веса для первого угла и второго угла равны 50%, то есть в качестве первого угла курса определяют среднее значение первого угла и второго угла, формула для получения первого угла курса θ представлена ниже:
θ = (arccos θ' + arcsin θ'') / 2.
В альтернативном варианте осуществления изобретения этап оценки, являются ли допустимыми значение первой тригонометрической функции и значение второй тригонометрической функции, на этапе S402 включает в себя следующие операции.
На этапе S502, получают значение функции, обратной для первой тригонометрической функции, и получают значение функции, обратной для второй тригонометрической функции.
На этапе S504 вычисляют разность значения функции, обратной для первой тригонометрической функции, и значения функции, обратной для второй тригонометрической функции.
На этапе S506, оценивают, меньше ли абсолютное значение разности заранее заданного угла.
На этапе S508, если абсолютное значение меньше заранее заданного угла, то определяют, что значение первой тригонометрической функции и значение второй тригонометрической функции являются допустимыми.
Здесь следует понимать, что заранее заданный угол может быть оптимизирован в соответствии с фактическими условиями.
В альтернативном варианте осуществления изобретения значение первой тригонометрической функции является значением синуса, а значение второй тригонометрической функции является значением косинуса.
В альтернативном варианте осуществления изобретения этап оценки, являются ли допустимыми значение первой тригонометрической функции и значение второй тригонометрической функции, на этапе S402 включает в себя следующие операции.
На этапе S602 оценивают, находится ли сумма квадратов значения первой тригонометрической функции и значения второй тригонометрической функции в заранее заданном диапазоне.
На этапе S604, если сумма квадратов находится в заранее заданном диапазоне, то определяют, что значение первой тригонометрической функции и значение второй тригонометрической функции являются допустимыми.
Более конкретно, если значение первой тригонометрической функции и значение второй тригонометрической функции являются допустимыми, то можно гарантировать, что допустимым будет первый угол курса, полученный с помощью значения первой тригонометрической функции и значения второй тригонометрической функции, и второй угол курса заменяют, если второй угол курса не является допустимым, таким образом, обеспечивают стабильный полет беспилотного летательного аппарата.
Более конкретно, если значение первой тригонометрической функции представляет собой значение синуса, значение второй тригонометрической функции представляет собой значение косинуса, то скорость беспилотного летательного аппарата в мировой системе координат может содержать скорость в направлении на север и скорость в направлении на восток беспилотного летательного аппарата в мировой системе координат, и скорость беспилотного летательного аппарата в связанной системе координат может содержать скорость беспилотного летательного аппарата в направлении оси х и скорость в направлении оси y в связанной системе координат, то в соответствии с приведенной выше формулой (3) может быть заранее задана формула для функции эффективности, при этом формулу для функции эффективности используют для оценки, являются ли допустимыми значение первой тригонометрической функции и значение второй тригонометрической функции. В качестве альтернативы, формула для функции эффективности может являться суммой квадратов значений синуса и косинуса, то есть следующей формулой:
f = sin2θ'' + cos θ',
где f представляет значение функции эффективности. Более конкретно, точность первого угла курса может быть определена с помощью величины f. Когда f близко к 1, значение первой тригонометрической функции и значение второй тригонометрической функции являются допустимыми, и первый угол курса является более точным. Из-за наличия шума для скорости, в качестве альтернативы заранее заданный диапазон может быть установлен составляющим от 0,9 до 1,1. Когда сумма квадратов значения первой тригонометрической функции и значения второй тригонометрической функции находится в пределах диапазона, можно считать, что точным является первый угол курса, определенный с помощью значения первой тригонометрической функции и значения второй тригонометрической функции. Здесь следует понимать, что заранее заданный диапазон может быть оптимизирован в соответствии с фактическими условиями.
В альтернативном варианте осуществления изобретения указанный способ дополнительно включает в себя последующий этап, который описан ниже. На этапе S108, если второй угол курса является допустимым, то вычисляют взвешенное среднее первого угла курса и второго угла курса, что делают в соответствии с заранее заданными весами первого угла курса и второго угла курса, и взвешенное среднее определяют как текущий угол курса беспилотного летательного аппарата.
Более конкретно, когда второй угол курса является допустимым, первый угол курса может быть использован в качестве текущего угла курса беспилотного летательного аппарата, или второй угол курса может быть использован в качестве текущего угла курса беспилотного летательного аппарата, но для увеличения точности текущего угла курса беспилотного летательного аппарата, могут быть заранее заданы веса для первого угла курса и для второго угла курса, и взвешенное среднее первого угла курса и второго угла курса берут в качестве текущего угла курса беспилотного летательного аппарата. Здесь следует понимать, что заранее заданные веса, соответствующие первому углу курса и второму углу курса, могут быть оптимизированы в соответствии с фактическими условиями.
В альтернативном варианте осуществления изобретения этап оценки, является ли допустимым второй угол курса в соответствии с результатом сравнения, на этапе S104 включает в себя следующие операции.
На этапе S702, определяют, является ли второй угол курса неправильным в соответствии с результатом сравнения.
На этапе S704, если второй угол курса является неправильным, то определяют, что второй угол курса является недопустимым.
В альтернативном варианте осуществления изобретения этап определения, является ли неправильным второй угол курса в соответствии с результатом сравнения, на этапе S702 включает в себя следующие операции.
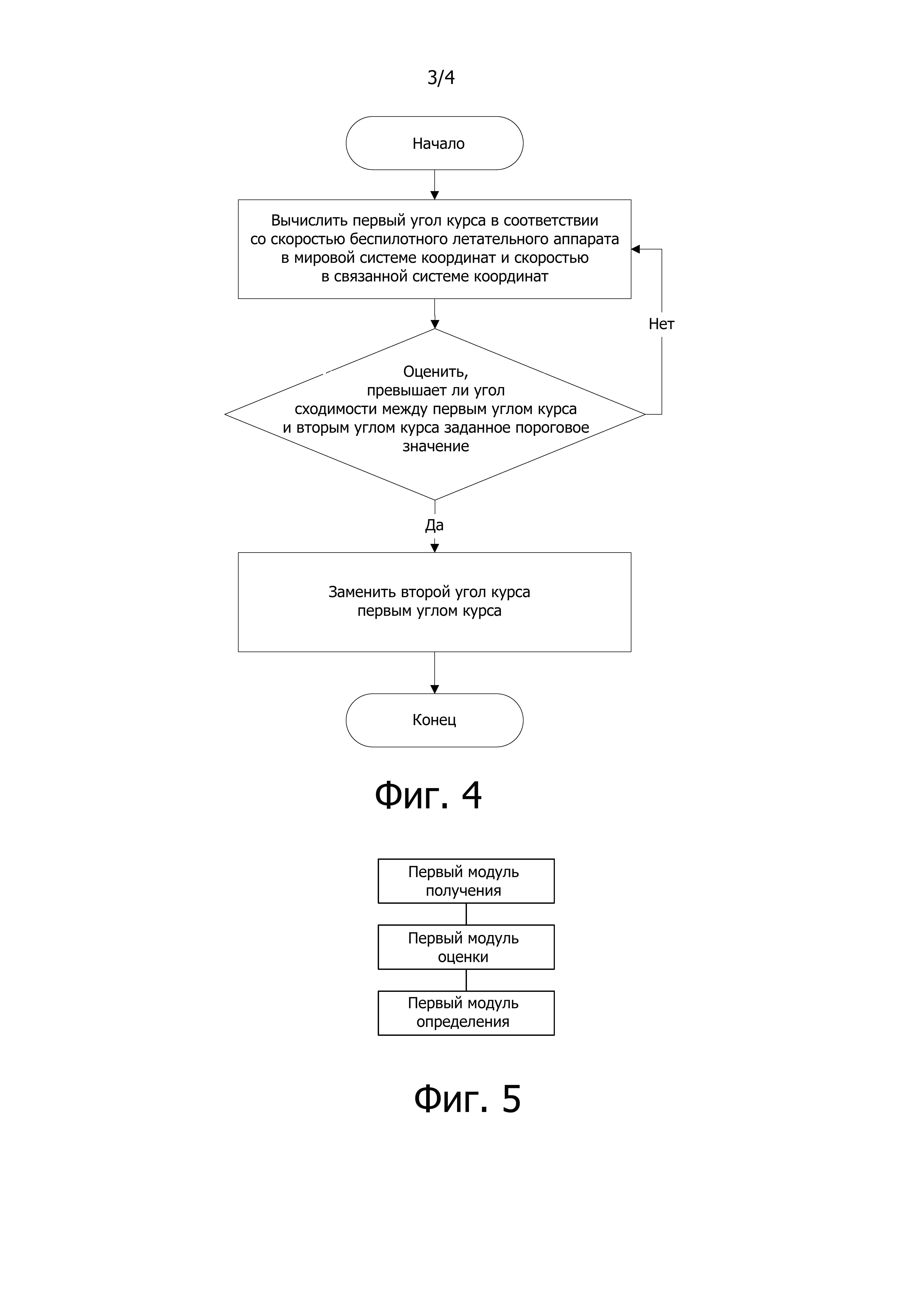
На этапе S802, оценивают, превышает ли угол сходимости заранее заданное пороговое значение.
На этапе S804, если угол сходимости между первым углом курса и вторым углом курса превышает заранее заданное пороговое значение, то определяют, что второй угол курса является неправильным.
Здесь следует понимать, что заранее заданное пороговое значение может быть оптимизировано в соответствии с фактическими условиями. Например, заранее заданное пороговое значение может быть установлено равным 5 градусам, 10 градусам и так далее. Если угол сходимости между первым углом курса и вторым углом курса превышает заранее заданное пороговое значение, то это указывает, что второй угол курса является неправильным, и текущий курс беспилотного летательного аппарата является необычным. Если угол сходимости между первым углом курса и вторым углом курса меньше или равен заранее заданного порогового значения, то это указывает, что второй угол курса является правильным, и текущий курс беспилотного летательного аппарата является обычным.
В альтернативном варианте осуществления изобретения этап определения, является ли неправильным второй угол курса в соответствии с результатом сравнения, включает в себя следующие операции на этапе S702.
На этапе S902 оценивают, в рамках заранее заданного периода времени, продолжает ли угол сходимости превышать заранее заданное пороговое значение.
На этапе S904, если угол сходимости продолжает превышать заранее заданное пороговое значение, то определяют, что второй угол курса является неправильным.
Более конкретно, если угол сходимости продолжает превышать заранее заданное пороговое значение в рамках заранее заданного периода времени, то это указывает, что второй угол курса является неправильным, и текущий курс беспилотного летательного аппарата является необычным. Если угол сходимости продолжает быть меньшим или равным заранее заданного порогового значения, то это указывает, что второй угол курса является правильным, и текущий курс беспилотного летательного аппарата является обычным. Здесь следует понимать, что заранее заданный период времени может быть оптимизирован в соответствии с фактическими условиями. Например, он может быть установлен равным 2 секундам.
В альтернативном варианте осуществления изобретения этап получения первого угла курса беспилотного летательного аппарата на этапе S102 включает в себя следующее: на этапе S1002, с заранее заданной частотой получают первый угол курса беспилотного летательного аппарата.
Здесь следует понимать, что заранее заданная частота может быть оптимизирована в соответствии с фактическими условиями.
В одном конкретном варианте осуществления изобретения, как показано на фиг. 3, скорость беспилотного летательного аппарата в мировой системе координат может быть получена с помощью первого устройства измерения курса, и она, более конкретно, может содержать скорость в направлении на север и скорость в направлении на восток беспилотного летательного аппарата в мировой системе координат. Далее с помощью второго устройства измерения курса получают скорость беспилотного летательного аппарата в связанной системе координат, и, более конкретно, эта скорость может содержать скорость беспилотного летательного аппарата в направлении оси х и скорость в направлении оси y связанной системы координат. Далее, в соответствии с зависимостью скорости беспилотного летательного аппарата в мировой системе координат, скорости в связанной системе координат и первого угла курса, определяют первый угол курса в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат, и в соответствии с формулой для функции эффективности оценивают точность первого угла курса. Если в заданное время значение, полученное в соответствии с формулой для функции эффективности, находится в диапазоне от 0,9 до 1,1, то это указывает, что вычисленный первый угол курса является точным и далее, как показано на фиг. 4, после определения первого угла курса в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат, может быть вычислен угол сходимости между первым углом курса и вторым углом курса, которые получены с помощью второй системы измерения, содержащей устройство RTK и/или инерциальное измерительное устройство, и оценивают, превосходит ли угол сходимости определенное пороговое значение V1, такое как 5 градусов. Если да, то это указывает на то, что первый угол курса является неправильным, и первый угол курса используют вместо второго угла курса. Если нет, то это указывает на то, что текущий определенный первый угол курса является правильным, может быть осуществлен возврат на этап определения первого угла курса в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат, и продолжают этапы вычисления и оценки для угла сходимости между углами курса, которые вычислены двумя способами.
Вариант 2 осуществления изобретения
В соответствии с этим вариантом осуществления изобретения, предложен вариант осуществления устройства для определения курса беспилотного летательного аппарата. На фиг. 5 показана схема устройства для определения курса беспилотного летательного аппарата в соответствии с одним вариантом осуществления настоящего изобретения. Как показано на фиг. 5, устройство содержит первый модуль получения, первый модуль оценки и первый модуль определения, при этом первый модуль получения выполнен с возможностью получения первого угла курса беспилотного летательного аппарата с помощью первой системы измерения, и получения второго угла курса беспилотного летательного аппарата с помощью второй системы измерения; первый модуль оценки выполнен с возможностью оценки, является ли второй угол курса допустимым в соответствии с результатом сравнения; и первый модуль определения выполнен с возможностью, если второй угол курса является недопустимым, определения первого угла курса в качестве текущего угла курса беспилотного летательного аппарата.
В этом варианте осуществления изобретения первый модуль получения получает первый угол курса беспилотного летательного аппарата с помощью первой системы измерения, и получает второй угол курса беспилотного летательного аппарата с помощью второй системы измерения; первый модуль оценки оценивает, является ли второй угол курса допустимым в соответствии с результатом сравнения; и если второй угол курса является недопустимым, первый модуль определения определяет первый угол курса в качестве текущего угла курса беспилотного летательного аппарата. Достигаются цели определения того, является ли допустимым второй угол курса, полученный с помощью второй системы измерения, и замены второго угла курса первым углом курса, который получен с использованием первой системы измерения, когда второй угол курса является недопустимым, таким образом достигаются технические эффекты гарантирования точности курса беспилотного летательного аппарата, улучшения безопасности и надежности беспилотного летательного аппарата и исключения опасности для беспилотного летательного аппарата, что делает полет беспилотного летательного аппарата безопасным и стабильным. Таким образом, решена техническая проблема уровня техники, которая заключается в том, что, когда угол курса измеряют с использованием электронного компаса или способа RTK, имеет место неправильно измеренный курс беспилотного летательного аппарата из-за помех и других факторов.
Здесь следует понимать, что первый модуль получения, первый модуль оценки и первый модуль определения могут работать в компьютерном конечном устройстве как части устройства, и функции, реализованные этими модулями, могут быть исполнены с помощью процессора в компьютерном конечном устройстве, при этом компьютерное конечное устройство также может быть таким конечным устройством, как смартфон (например, смартфон с операционной системой Android, смартфон с операционной системой iOS и так далее), планшетный компьютер, наладонный компьютер, мобильное интернет-устройство (MID) и PAD.
В альтернативном варианте осуществления изобретения первая система измерения содержит устройство визуального определения местоположения и устройство спутникового определения местоположения, а вторая система измерения содержит устройство RTK и/или инерциальное измерительное устройство.
В альтернативном варианте осуществления изобретения, первая система измерения содержит первое устройство измерения курса и второе устройство измерения курса. Первый модуль получения содержит: второй модуль получения, который выполнен с возможностью получения скорости беспилотного летательного аппарата в мировой системе координат с помощью первого устройства измерения курса, и получения скорости беспилотного летательного аппарата в связанной системе координат с помощью второго устройства измерения курса; и второй модуль определения, который выполнен с возможностью определения первого угла курса в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат.
Здесь следует понимать, что второй модуль получения и второй модуль определения могут работать в компьютерном конечном устройстве как части устройства, и функции, реализованные этими модулями, могут быть исполнены с помощью процессора в компьютерном конечном устройстве, при этом компьютерное конечное устройство также может быть таким конечным устройством, как смартфон (например, смартфон с операционной системой Android, смартфон с операционной системой iOS и так далее), планшетный компьютер, наладонный компьютер, MID и PAD.
В альтернативном варианте осуществления изобретения, второй модуль определения содержит: третий модуль определения, который выполнен с возможностью определения значения первой тригонометрической функции в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат; четвертый модуль определения, который выполнен с возможностью определения значения второй тригонометрической функции в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат; и пятый модуль определения, который выполнен с возможностью определения первого угла курса в соответствии со значением первой тригонометрической функции и значением второй тригонометрической функции.
Здесь следует понимать, что третий модуль определения, четвертый модуль определения и пятый модуль определения могут работать в компьютерном конечном устройстве как части устройства, и функции, реализованные этими модулями, могут быть исполнены с помощью процессора в компьютерном конечном устройстве, при этом компьютерное конечное устройство также может быть таким конечным устройством, как смартфон (например, смартфон с операционной системой Android, смартфон с операционной системой iOS и так далее), планшетный компьютер, наладонный компьютер, MID и PAD.
В альтернативном варианте осуществления изобретения, пятый модуль определения содержит: второй модуль оценки, который выполнен с возможностью оценки, являются ли допустимыми значение первой тригонометрической функции и значение второй тригонометрической функции; первый модуль вычисления, который выполнен с возможностью вычисления, если значение первой тригонометрической функции и значение второй тригонометрической функции являются допустимыми, первого угла в соответствии со значением первой тригонометрической функции, и вычисления второго угла в соответствии со значением второй тригонометрической функции; и шестой модуль определения, который выполнен с возможностью вычисления взвешенного среднего первого угла и второго угла в соответствии с заранее заданными весами первого угла и второго угла, и определения взвешенного среднего в качестве первого угла курса.
Здесь следует понимать, что второй модуль оценки, первый модуль вычисления и шестой модуль определения могут работать в компьютерном конечном устройстве как части устройства, и функции, реализованные этими модулями, могут быть исполнены с помощью процессора в компьютерном конечном устройстве, при этом компьютерное конечное устройство также может быть таким конечным устройством, как смартфон (например, смартфон с операционной системой Android, смартфон с операционной системой iOS и так далее), планшетный компьютер, наладонный компьютер, MID и PAD.
В альтернативном варианте осуществления изобретения второй модуль оценки содержит: третий модуль получения, который выполнен с возможностью получения значения функции, обратной для первой тригонометрической функции, и получения значения функции, обратной для второй тригонометрической функции; второй модуль вычисления, который выполнен с возможностью вычисления разности значения функции, обратной для первой тригонометрической функции, и значения функции, обратной для второй тригонометрической функции; третий модуль оценки, который выполнен с возможностью оценки, меньше ли абсолютное значение разности заранее заданного угла; и седьмой модуль определения, который выполнен с возможностью, если абсолютное значение меньше заранее заданного угла, определения того, что значение первой тригонометрической функции и значение второй тригонометрической функции являются допустимыми.
Здесь следует понимать, что третий модуль получения, второй модуль вычисления, третий модуль оценки и седьмой модуль определения могут работать в компьютерном конечном устройстве как части устройства, и функции, реализованные этими модулями, могут быть исполнены с помощью процессора в компьютерном конечном устройстве, при этом компьютерное конечное устройство также может быть таким конечным устройством, как смартфон (например, смартфон с операционной системой Android, смартфон с операционной системой iOS и так далее), планшетный компьютер, наладонный компьютер, мобильное интернет-устройство (MID) и PAD.
В альтернативном варианте осуществления изобретения значение первой тригонометрической функции является значением синуса, а значение второй тригонометрической функции является значением косинуса.
В альтернативном варианте осуществления изобретения второй модуль оценки содержит: четвертый модуль оценки, который выполнен с возможностью оценки, находится ли сумма квадратов значения первой тригонометрической функции и значения второй тригонометрической функции в заранее заданном диапазоне; и восьмой модуль определения, который выполнен с возможностью, если указанная сумма квадратов находится в заранее заданном диапазоне, определения того, что значение первой тригонометрической функции и значение второй тригонометрической функции являются допустимыми.
Здесь следует понимать, что четвертый модуль оценки и восьмой модуль определения могут работать в компьютерном конечном устройстве как части устройства, и функции, реализованные этими модулями, могут быть исполнены с помощью процессора в компьютерном конечном устройстве, при этом компьютерное конечное устройство также может быть таким конечным устройством, как смартфон (например, смартфон с операционной системой Android, смартфон с операционной системой iOS и так далее), планшетный компьютер, наладонный компьютер, MID и PAD.
В альтернативном варианте осуществления изобретения заранее заданный диапазон составляет от 0,9 до 1,1.
В альтернативном варианте осуществления изобретения устройство определения дополнительно содержит девятый модуль определения, который выполнен с возможностью вычисления, если второй угол курса является допустимым, взвешенного среднего первого угла курса и второго угла курса, что делают в соответствии с заранее заданными весами первого угла курса и второго угла курса, и определения взвешенного среднего в качестве текущего угла курса беспилотного летательного аппарата.
Здесь следует понимать, что девятый модуль определения может работать в компьютерном конечном устройстве как часть устройства, и функции, реализованные модулями, могут быть исполнены с помощью процессора в компьютерном конечном устройстве, при этом компьютерное конечное устройство также может быть таким конечным устройством, как смартфон (например, смартфон с операционной системой Android, смартфон с операционной системой iOS и так далее), планшетный компьютер, наладонный компьютер, MID и PAD.
В альтернативном варианте осуществления изобретения первый модуль оценки содержит: десятый модуль определения, который выполнен с возможностью определения, является ли второй угол курса неправильным в соответствии с результатом сравнения; и одиннадцатый модуль определения, который выполнен с возможностью, если второй угол курса является неправильным, определения того, что второй угол курса является недопустимым.
Здесь следует понимать, что десятый модуль определения и одиннадцатый модуль определения могут работать в компьютерном конечном устройстве как части устройства, и функции, реализованные этими модулями, могут быть исполнены с помощью процессора в компьютерном конечном устройстве, при этом компьютерное конечное устройство также может быть таким конечным устройством, как смартфон (например, смартфон с операционной системой Android, смартфон с операционной системой iOS и так далее), планшетный компьютер, наладонный компьютер, MID и PAD.
В альтернативном варианте осуществления изобретения, двенадцатый модуль определения содержит: пятый модуль оценки, который выполнен с возможностью оценки, превышает ли угол сходимости между первым углом курса и вторым углом курса заранее заданное пороговое значение; и двенадцатый модуль определения, который выполнен с возможностью, если угол сходимости между первым углом курса и вторым углом курса превышает заранее заданное пороговое значение, определения того, что второй угол курса является неправильным.
Здесь следует понимать, что пятый модуль оценки и двенадцатый модуль определения могут работать в компьютерном конечном устройстве как части устройства, и функции, реализованные этими модулями, могут быть исполнены с помощью процессора в компьютерном конечном устройстве, при этом компьютерное конечное устройство также может быть таким конечным устройством, как смартфон (например, смартфон с операционной системой Android, смартфон с операционной системой iOS и так далее), планшетный компьютер, наладонный компьютер, MID и PAD.
В альтернативном варианте осуществления изобретения, двенадцатый модуль определения содержит: шестой модуль оценки, который выполнен с возможностью оценки, в рамках заранее заданного периода времени, продолжает ли угол сходимости превышать заранее заданное пороговое значение; и тринадцатый модуль определения, который выполнен с возможностью, если угол сходимости продолжает превышать заранее заданное пороговое значение, определения того, что второй угол курса является неправильным.
Здесь следует понимать, что шестой модуль оценки и тринадцатый модуль определения могут работать в компьютерном конечном устройстве как части устройства, и функции, реализованные этими модулями, могут быть исполнены с помощью процессора в компьютерном конечном устройстве, при этом компьютерное конечное устройство также может быть таким конечным устройством, как смартфон (например, смартфон с операционной системой Android, смартфон с операционной системой iOS и так далее), планшетный компьютер, наладонный компьютер, MID и PAD.
В альтернативном варианте осуществления изобретения первый модуль получения содержит: четвертый модуль получения, который выполнен с возможностью получения первого угла курса беспилотного летательного аппарата с заранее заданной частотой.
Здесь следует понимать, что четвертый модуль определения может работать в компьютерном конечном устройстве как часть устройства, и функции, реализованные модулями, могут быть исполнены с помощью процессора в компьютерном конечном устройстве, при этом компьютерное конечное устройство также может быть таким конечным устройством, как смартфон (например, смартфон с операционной системой Android, смартфон с операционной системой iOS и так далее), планшетный компьютер, наладонный компьютер, MID и PAD.
Вариант 3 осуществления изобретения
В соответствии с этим вариантом осуществления изобретения, предложен вариант осуществления носителя информации. Носитель информации может отличаться тем, что содержит сохраненную программу, причем эту программу исполняют с целью такого управления носителем информации, чтобы осуществлять способ определения курса беспилотного летательного аппарата.
Вариант 4 осуществления изобретения
В соответствии с этим вариантом осуществления изобретения, предложен вариант осуществления процессора. Процессор может быть выполнен с возможностью исполнения программы, причем эту программу исполняют с целью осуществления способа определения курса беспилотного летательного аппарата.
Вариант 5 осуществления изобретения
В соответствии с этим вариантом осуществления изобретения, предложен вариант осуществления конечного устройства. Конечное устройство содержит первый модуль получения, первый модуль оценки, первый модуль определения и процессор, при этом первый модуль получения выполнен с возможностью получения первого угла курса беспилотного летательного аппарата с помощью первой системы измерения, и получения второго угла курса беспилотного летательного аппарата с помощью второй системы измерения; первый модуль оценки выполнен с возможностью оценки, является ли второй угол курса допустимым в соответствии с результатом сравнения; первый модуль определения выполнен с возможностью, если второй угол курса является недопустимым, определения первого угла курса в качестве текущего угла курса беспилотного летательного аппарата; и процессор исполняет программу, при этом программу исполняют для осуществления способа определения курса беспилотного летательного аппарата для выходных данных первого модуля получения, первого модуля оценки и первого модуля определения.
Вариант 6 осуществления изобретения
В соответствии с этим вариантом осуществления изобретения, предложен вариант осуществления конечного устройства. Конечное устройство содержит первый модуль получения, первый модуль оценки, первый модуль определения и носитель информации, при этом первый модуль получения выполнен с возможностью получения первого угла курса беспилотного летательного аппарата с помощью первой системы измерения, и получения второго угла курса беспилотного летательного аппарата с помощью второй системы измерения; первый модуль оценки выполнен с возможностью оценки, является ли второй угол курса допустимым в соответствии с результатом сравнения; первый модуль определения выполнен с возможностью, если второй угол курса является недопустимым, определения первого угла курса в качестве текущего угла курса беспилотного летательного аппарата; и носитель информации выполнен с возможностью сохранения программы, при этом программу исполняют для осуществления способа определения курса беспилотного летательного аппарата для выходных данных первого модуля получения, первого модуля оценки и первого модуля определения.
Вариант 7 осуществления изобретения
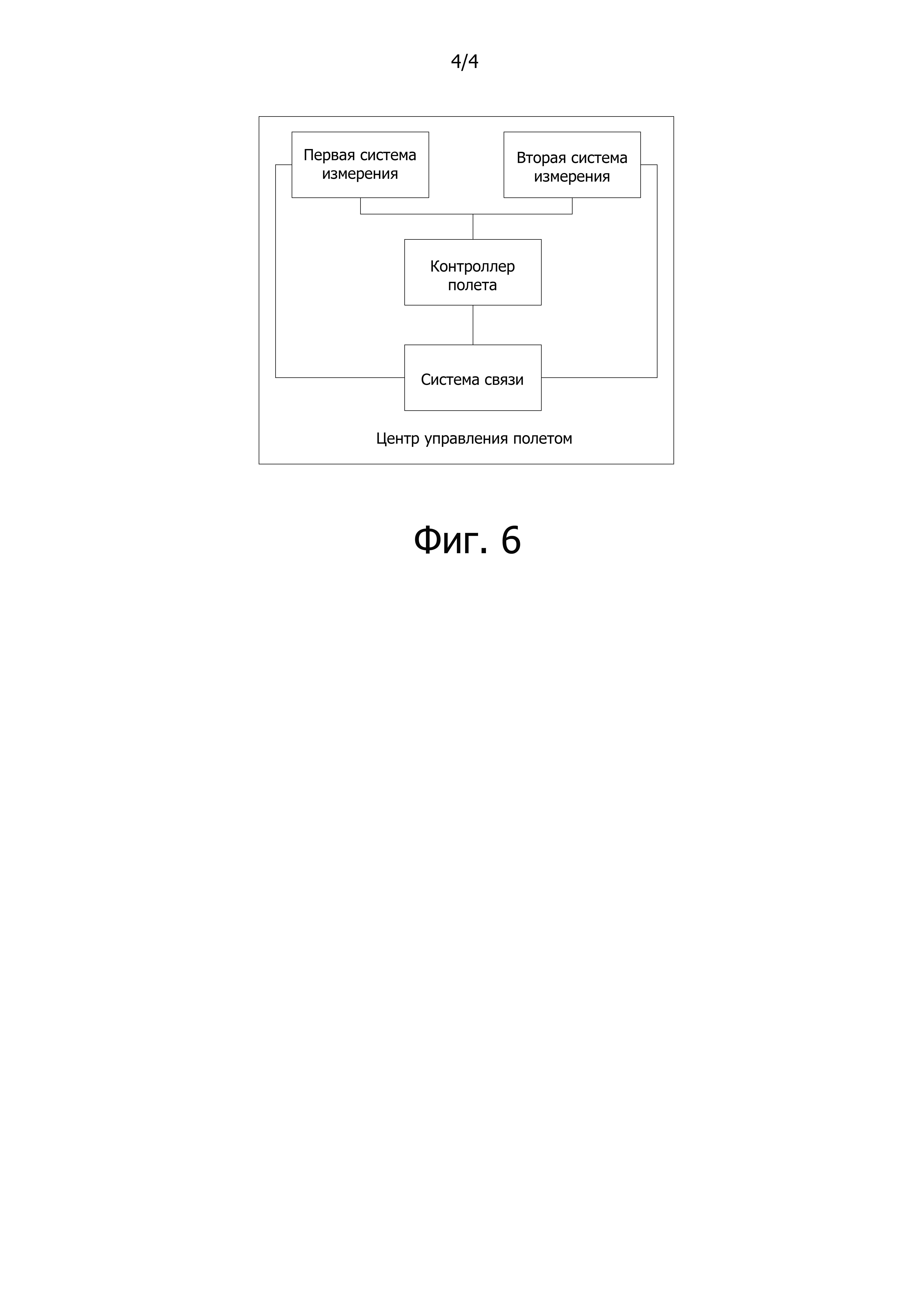
В соответствии с этим вариантом осуществления изобретения, предложен вариант осуществления беспилотного летательного аппарата. На фиг. 6 показан беспилотный летательный аппарат в соответствии с одним вариантом осуществления настоящего изобретения. Как показано на фиг. 6, беспилотный летательный аппарат содержит центр управления полетом, при этом центр управления полетом содержит контроллер полета, первую систему измерения, вторую систему измерения и систему связи; первая система измерения выполнена с возможностью получения первого угла курса беспилотного летательного аппарата и передачи информации о первом угле курса на контроллер полета; вторая система измерения выполнена с возможностью получения второго угла курса беспилотного летательного аппарата и передачи информации о втором угле курса на контроллер полета; контроллер полета содержит носитель информации, который выполнен с возможностью сохранения программы, при этом программу исполняют для осуществления следующего: получают первый угол курса беспилотного летательного аппарата с помощью первой системы измерения, получают второй угол курса беспилотного летательного аппарата с помощью второй системы измерения, определяют угол сходимости между первым курсом, который соответствует первому углу курса, и вторым курсом, который соответствует второму углу курса, сравнивают угол сходимости с заранее заданным пороговым значением, оценивают, является ли второй угол курса допустимым в соответствии с результатом сравнения, и если второй угол курса является недопустимым, определяют первый угол курса в качестве текущего угла курса беспилотного летательного аппарата; и система связи выполнена с возможностью передачи информации между контроллером полета, первой системой измерения и второй системой измерения.
В альтернативном варианте осуществления изобретения первая система измерения содержит устройство визуального определения местоположения и устройство спутникового определения местоположения, а вторая система измерения содержит устройство RTK и/или инерциальное измерительное устройство.
В альтернативном варианте осуществления изобретения, первая система измерения содержит первое устройство измерения курса и второе устройство измерения курса. Первое устройство измерения курса выполнено с возможностью получения скорости беспилотного летательного аппарата в мировой системе координат; второе устройство измерения курса выполнено с возможностью получения скорости беспилотного летательного аппарата в связанной системе координат; и контроллер полета выполнен с возможностью получения, при получении первого угла курса беспилотного летательного аппарата с помощью первой системы измерения, скорости беспилотного летательного аппарата в мировой системе координат с помощью первого устройства измерения курса, получения скорости беспилотного летательного аппарата в связанной системе координат с помощью второго устройства измерения курса, и определения первого угла курса в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат.
В альтернативном варианте осуществления изобретения контроллер полета выполнен с возможностью, при определении первого угла курса в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат, определения значения первой тригонометрической функции в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат, определения значения второй тригонометрической функции в соответствии со скоростью в мировой системе координат и скоростью в связанной системе координат, и определения первого угла курса в соответствии со значением первой тригонометрической функции и значением второй тригонометрической функции.
В альтернативном варианте осуществления изобретения контроллер полета выполнен с возможностью оценки, при определении первого угла курса в соответствии со значением первой тригонометрической функции и значением второй тригонометрической функции, являются ли допустимыми значение первой тригонометрической функции и значение второй тригонометрической функции, вычисления, если значение первой тригонометрической функции и значение второй тригонометрической функции являются допустимыми, первого угла в соответствии со значением первой тригонометрической функции, вычисления второго угла в соответствии со значением второй тригонометрической функции, вычисления взвешенного среднего первого угла и второго угла в соответствии с заранее заданными весами первого угла и второго угла, и определения взвешенного среднего в качестве первого угла курса.
В альтернативном варианте осуществления изобретения контроллер полета выполнен с возможностью, при оценке, являются ли допустимыми значение первой тригонометрической функции и значение второй тригонометрической функции, получения значения функции, обратной для первой тригонометрической функции, получения значения функции, обратной для второй тригонометрической функции, вычисления разности значения функции, обратной для первой тригонометрической функции, и значения функции, обратной для второй тригонометрической функции, оценки, меньше ли абсолютное значение разности заранее заданного угла, и определения, если абсолютное значение меньше заранее заданного угла, того, что значение первой тригонометрической функции и значение второй тригонометрической функции являются допустимыми.
В альтернативном варианте осуществления изобретения значение первой тригонометрической функции является значением синуса, а значение второй тригонометрической функции является значением косинуса.
В альтернативном варианте осуществления изобретения контроллер полета выполнен с возможностью, при оценке, являются ли допустимыми значение первой тригонометрической функции и значение второй тригонометрической функции, оценки, находится ли сумма квадратов значения первой тригонометрической функции и значения второй тригонометрической функции в заранее заданном диапазоне, и определения, если сумма квадратов находится в заранее заданном диапазоне, того, что значение первой тригонометрической функции и значение второй тригонометрической функции являются допустимыми.
В альтернативном варианте осуществления изобретения заранее заданный диапазон составляет от 0,9 до 1,1.
В альтернативном варианте осуществления изобретения контроллер полета выполнен с возможностью вычисления, если второй угол курса является допустимым, взвешенного среднего первого угла курса и второго угла курса, что делают в соответствии с заранее заданными весами первого угла курса и второго угла курса, и определения взвешенного среднего в качестве текущего угла курса беспилотного летательного аппарата.
В альтернативном варианте осуществления изобретения контроллер полета выполнен с возможностью, при оценке, является ли допустимым второй угол курса, что делают в соответствии с результатом сравнения, определения, является ли неправильным второй угол курса, что делают в соответствии с результатом сравнения, и определения, если второй угол курса является неправильным, того, что второй угол курса является недопустимым.
В альтернативном варианте осуществления изобретения контроллер полета выполнен с возможностью, при определении, является ли неправильным второй угол курса, что делают в соответствии с результатом сравнения, оценки, превышает ли угол сходимости заранее заданное пороговое значение, и определения, если угол сходимости между первым углом курса и вторым углом курса превышает заранее заданное пороговое значение, того, что второй угол курса является неправильным.
В альтернативном варианте осуществления изобретения контроллер полета выполнен с возможностью, при определении, является ли неправильным второй угол курса, что делают в соответствии с результатом сравнения, оценки, продолжает ли угол сходимости превышать заранее заданное пороговое значение в рамках заранее заданного периода времени, и определения, если угол сходимости продолжает превышать заранее заданное пороговое значение, того, что второй угол курса является неправильным.
В альтернативном варианте осуществления изобретения первая система измерения выполнена с возможностью получения, при получении первого угла курса беспилотного летательного аппарата, первого угла курса беспилотного летательного аппарата с заранее заданной частотой.
Разные функциональные блоки, предусмотренные в вариантах осуществления настоящего изобретения, могут работать на мобильном конечном устройстве, компьютерном конечном устройстве или аналогичном вычислительном устройстве, или могут храниться в качестве части носителя информации.
Таким образом, в вариантах осуществления изобретения может быть предложено компьютерное конечное устройство, которое может быть любым компьютерным конечным устройством из группы компьютерных конечных устройств. В качестве альтернативы, в настоящем варианте осуществления изобретения упомянутое выше компьютерное конечное устройство также может быть заменено таким конечным устройством, как мобильное конечное устройство.
В качестве альтернативы, в настоящем варианте осуществления изобретения упомянутое выше компьютерное конечное устройство может быть расположено по меньшей мере в одном из нескольких сетевых устройств компьютерной сети.
В настоящем варианте осуществления изобретения упомянутое выше компьютерное конечное устройство может осуществлять программный код следующих этапов из способа определения курса беспилотного летательного аппарата: первый угол курса беспилотного летательного аппарата получают с помощью первой системы измерения, и второй угол курса беспилотного летательного аппарата получают с помощью второй системы измерения; оценивают, является ли второй угол курса допустимым в соответствии с результатом сравнения; и если второй угол курса является недопустимым, то первый угол курса определяют в качестве текущего угла курса беспилотного летательного аппарата.
В качестве альтернативы, компьютерное конечное устройство может содержать: один или несколько процессоров, память и устройство передачи.
Память может быть выполнена с возможностью сохранения программы и программного модуля, таких как программная команда/модуль, соответствующие способу и устройству для определения курса беспилотного летательного аппарата в вариантах осуществления изобретения. Процессор исполняет разные функциональные приложения и осуществляет обработку данных, то есть реализует описанный выше способ определения курса беспилотного летательного аппарата путем исполнения программы и программного модуля, которые хранятся в памяти. Память может содержать высокоскоростное оперативное запоминающее устройство и также может содержать энергонезависимую память, такую как одно или несколько магнитных устройств хранения, флеш-память или другие энергонезависимые полупроводниковые устройства памяти. В некоторых примерах память может дополнительно содержать памяти, которые расположены удаленно относительно процессора и которые могут быть соединены с конечным устройством с помощью сети. Примерами таких сетей являются, помимо прочего, Интернет, интранет, локальные сети, сети мобильной связи и их комбинации.
Устройство передачи выполнено с возможностью приема или передачи данных по сети. Упомянутые выше конкретные примеры сетей могут содержать проводную сеть и беспроводную сеть. В одном примере устройство передачи содержит контроллер (NIC) сетевого интерфейса, который может быть соединен с другими сетевыми устройствами и маршрутизаторами с помощью сетевого кабеля для связи с помощью Интернета или локальной сети. В одном примере устройство передачи является радиочастотным (RF) модулем для беспроводной связи с Интернетом.
Более конкретно, память выполнена с возможностью хранения информации об условиях заранее установленных действий и заранее установленных допущенных пользователях и приложениях.
Процессор может вызывать информацию и приложения, которые хранятся в памяти, с помощью устройства передачи с целью исполнения программного кода этапов способа для каждого варианта из альтернативных или предпочтительных вариантов осуществления изобретения из упомянутых выше вариантов осуществления способа.
Специалистам в рассматриваемой области может быть ясно, что компьютерное конечное устройство также может быть таким конечным устройством, как смартфон (например, смартфон с операционной системой Android, смартфон с операционной системой iOS и так далее), планшетный компьютер, наладонный компьютер, MID и PAD.
Специалистам в рассматриваемой области может быть ясно, что все или часть этапов упомянутых выше вариантов осуществления изобретения могут быть завершены с помощью программы для команд аппаратному обеспечению, которое касается конечного устройства, при этом программа может храниться на считываемом компьютером носителе информации, и носитель информации может содержать: флеш-диск, ROM, RAM, магнитный диск или оптический диск.
В варианте осуществления изобретения также предложен носитель информации. В качестве альтернативы, в настоящем варианте осуществления изобретения упомянутый выше носитель информации может быть выполнен с возможностью сохранения программного кода, который осуществляет способ для определения курса беспилотного летательного аппарата, который предложен в упомянутых выше вариантах осуществления способа и вариантах осуществления устройства.
В качестве альтернативы, в настоящем варианте осуществления изобретения упомянутый выше носитель информации может быть расположен в любом одном из компьютерных конечных устройств из группы компьютерных конечных устройств в компьютерной сети, или в любом одном из мобильных конечных устройств из группы мобильных конечных устройств.
В качестве альтернативы, в настоящем варианте осуществления изобретения носитель информации выполнен с возможностью сохранения программного кода для осуществления следующих этапов: первый угол курса беспилотного летательного аппарата получают с помощью первой системы измерения, и второй угол курса беспилотного летательного аппарата получают с помощью второй системы измерения; оценивают, является ли второй угол курса допустимым в соответствии с результатом сравнения; и если второй угол курса является недопустимым, то первый угол курса определяют в качестве текущего угла курса беспилотного летательного аппарата.
В качестве альтернативы, в настоящем варианте осуществления изобретения носитель информации также может быть выполнен с возможностью хранения программных кодов для разных предпочтительных или альтернативных этапов способа, которые предусмотрены способом определения курса беспилотного летательного аппарата.
Способ и устройство для определения курса беспилотного летательного аппарата, которые соответствуют настоящему изобретению, описаны выше с помощью примера и со ссылками на приложенные чертежи. Тем не менее, специалисты в рассматриваемой области должны понимать, что для способа и устройства для определения курса беспилотного летательного аппарата, которые описаны выше и которые соответствуют настоящему изобретению, могут быть предложены разные улучшения, которые находятся в рамках объема изобретения. Следовательно, объем защиты настоящего изобретения должен быть определен содержимым приложенной формулой изобретения.
Устройство для определения курса беспилотного летательного аппарата содержит процессор и память. Первый блок получения, первый модуль оценки, первый модуль определения и подобные хранятся в памяти и служат в качестве программных блоков, и процессор исполняет упомянутые выше программные блоки, которые хранятся в памяти.
Процессор содержит ядро, которое вызывает соответствующий программный блок из памяти. Может присутствовать одно или несколько ядер и возможно агрегировать пути доступа любой длины путем регулировки параметров ядра.
Память может содержать энергозависимую память, RAM и/или энергонезависимую память в считываемом компьютером носителе, таком как ROM или флеш-ROM, память, которая содержит по меньшей мере одну микросхему для хранения.
В настоящей заявке также описан вариант осуществления компьютерного программного продукта, при исполнении которого на устройстве обработки данных осуществляют инициализацию программного кода, обладающего следующими этапами способа: первый угол курса беспилотного летательного аппарата получают с помощью первой системы измерения, и второй угол курса беспилотного летательного аппарата получают с помощью второй системы измерения; оценивают, является ли второй угол курса допустимым в соответствии с результатом сравнения; и если второй угол курса является недопустимым, то первый угол курса определяют в качестве текущего угла курса беспилотного летательного аппарата.
Порядковые номера вариантов осуществления изобретения приведены просто для описания, и они не представляют достоинства или недостатки вариантов осуществления изобретения.
В упомянутых выше вариантах осуществления изобретения описания каждого варианта осуществления изобретения выделены соответствующим образом и части, которые подробно не освещены в определенном варианте осуществления изобретения, могут ссылаться на соответствующие описания других вариантов осуществления изобретения.
В нескольких вариантах осуществления изобретения, которые предложены в настоящей заявке, следует понимать, что описанное техническое содержание может быть реализовано другими способами. Описанные выше варианты осуществления устройства являются просто примерами. Например, деление блока может быть делением по логическим функциям. В фактической реализации может присутствовать другое деление, например, несколько блоков или компонентов могут быть объединены или скомбинированы в другую систему, или некоторые признаки могут быть опущены или не реализованы. Кроме того, связь или прямая связь или коммуникационное соединение, которые показаны или описаны, могут быть косвенной связью или коммуникационным соединением между блоками или модулями с помощью некоторых интерфейсов, и они могут быть электрическими или другими.
Блоки, описанные как отдельные элементы, могут быть физически отделены, но могут и не быть физически отделены, и компоненты, показанные как блоки, могут быть физическими блоками, но могут и не быть физическими блоками, то есть, могут быть расположены в одном месте или могут быть распределены по нескольким блокам. Некоторые или все блоки могут быть выбраны в соответствии с фактическими потребностями в достижении целей для решения из варианта осуществления изобретения.
Кроме того, функциональные блоки в каждом варианте осуществления настоящего изобретения могут быть объединены в один блок обработки, или каждый из блоков может физически существовать отдельно или два или несколько блоков могут быть объединены в один блок. Объединенный блок может быть реализован в форме аппаратного обеспечения или может быть реализован в форме аппаратных и программных функциональных блоков.
Объединенный блок может храниться на считываемом компьютером носителе информации, если он реализован в форме программного функционального блока и поставляется или используется в виде отдельного продукта. На основе такого понимания, техническое решение из настоящего изобретения, которое является необходимым или вносит вклад в уровень техники, или все техническое решение или его часть, может быть реализовано в форме программного продукта, который хранится на носителе информации и который содержит множество команд, используемых для побуждения компьютерного устройства (которое может быть персональным компьютером, сервером или сетевым устройством и так далее) осуществлять все или часть этапов способа, описанного в разных вариантах осуществления изобретения. Упомянутый выше носитель информации содержит: разные носители, которые способны хранить программный код, такие как U-диск, ROM, RAM, мобильный накопитель на жестких дисках, магнитный диск или оптический диск.
Указанное выше является только предпочтительными реализациями изобретения. Следует понимать, что специалисты в рассматриваемой области могут предложить ряд модификаций и усовершенствований без выхода за пределы идей изобретения и такие модификации и усовершенствования также считаются находящимися в пределах объема защиты настоящего изобретения.
Реферат
Группа изобретений относится к способу определения курса беспилотного летательного аппарата и беспилотному летательному аппарату. Для определения курса получают первый и второй углы курса, определяют угол их сходимости и сравнивают его с заданным пороговым значением, выбирают один из углов курса в качестве текущего. Беспилотный летательный аппарат выполнен с возможностью реализации вышеуказанного способа. Обеспечивается повышение точности определения курса. 2 н. и 13 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство определения углов пространственной ориентации летательного аппарата
Комментарии