Робот для диагностики и ремонта трубопроводного транспорта - RU2721473C1
Код документа: RU2721473C1
Чертежи





Описание
Изобретение относится к устройствам мониторинга неподвижных объектов. Область применения охватывает гибридные роботы для определения, разметки и ремонта участков трубопроводного транспорта с химическими или радиоактивными утечками [1, 2].
Известны и широко применяются различные устройства мониторинга и диагностики объектов территории, основанные на наземно-воздушных дистанционно-управляемых системах [1-13].
Существенным признаком этих устройств является то, что дистанционно управляется устройство, объединяющее квадрокоптер, способный летать, и колесо, способное передвигаться по поверхности.
Недостатки устройств применительно к ремонту участков трубопровода с химическими и радиоактивными утечками заключаются в невозможности применения робота непосредственно на трубе с препятствиями, в стесненных условиях здания и сооружения, а также в низком коэффициенте полезного действия из-за повышенной затраты энергии винтов приводов мультикоптера (до 60%) из-за необходимости включения всех четырех винтов для горизонтального перемещения, малая грузоподъемность, малая горизонтальная устойчивость (сильное раскачивание).
В качестве прототипа выбрано устройство, в котором на универсальной аэродинамической платформе, выполненной одновременно в виде клетки и колеса, размещен гексокоптер [патент №2661295 РФ «Устройство для определения и разметки участков территории с химическим и радиоактивным заражением», Гуцул В.И., Сырямкин В.И. и др., публ. 13.07.2018]. Прототип представляет собой робот, состоящий из мультикоптера и аэродинамической платформы, имеющий возможность перемещаться по наземной поверхности и в воздушном пространстве. Робот содержит гектокоптер с шестью пропеллерами и приводами, закрепленный на универсальной аэродинамической платформе, контроллер управления приводами движения и приводами полета, универсальный мобильный блок питания, определитель координат GPS/ГЛОНАСС, гироскоп, акселерометр, высотомер, блок разметки опасных мест трубопровода, блок устранения опасных мест трубопровода, блок управления навесным оборудованием, а также блок горизонтальной стабилизации. Для управления роботом используется стационарное рабочее место управления с универсальным пультом управления, запитанное от стационарного блока питания. Пространственное положение робота определяют вне зависимости от ориентации, скорости движения и времени суток. При этом получают и распознают звуковые изображения, визуальные изображения, информацию о химической обстановке, информацию о радиационной обстановке. Устройство-прототип способно перемещаться по грунту и по воздуху, разворачиваться на месте, имеет возможность работать в автоматическом и автоматизированном режимах функционирования. Недостаток заключается в низких функциональных возможностях (невозможности перемещения по трубам, углублениям, снегу, льду, воде, невозможности перемещения в ограниченном пространстве с препятствиями и в ветреную погоду; невозможности определения и разметки участков объектов контроля (труб) с химическими и радиоактивными утечками), недостаточной оперативности выполнения заданных технологических операций, малой продолжительности автономной работы, малой грузоподъемности.
Задачей является создание нового устройства для диагностики, разметки и ремонта участков объектов контроля (труб) с химическими, нефтяными и радиоактивными утечками с расширенными функциональными возможностями, решающего проблемы повышения точности и быстродействия определения координат, оперативности и маневренности, удобства управления, способного распознавать звуковую и визуальную информацию (изображения), определять участки объектов контроля (труб) с химическими и радиоактивными утечками и устранять повреждения.
Поставленная задача достигается оборудованием робота необходимыми датчиками и блоками управления.
Заявленное устройство, как и прототип, имеет возможность перемещаться по любой траектории по наземной поверхности и в воздушном пространстве, содержит мультикоптер, например, гексокоптер, закрепленный на универсальной аэродинамической платформе 1, приводы с пропеллерами 9, универсальный пульт управления роботом 21, стационарное компьютеризованное рабочее место управления 22, универсальный стационарный блок питания 23, определитель координат GPS/ГЛОНАСС, гироскоп, акселерометр, высотомер, блок разметки опасных участков контроля (БРОУК); - 13; блок устранения опасных участков контроля (БУОУК) - 14.
Новым является то, что универсальная аэродинамическая платформа 1 снабжена подвижной осью 4 с соответствующим блоком управления этой осью 6, закрепленной на платформе 1, имеющей левый обод со спицами 2 и правый обод со спицами 3, а также поперечинами 5 с соответствующим блоком управления поперечинами 7. В состав устройства включены: анализатор характеристик объекта 11, комплексный блок управления 12, причем комплексный блок управления 12 подключен к блоку разметки опасных участков объекта контроля 13 и блоку устранения опасных участков 14. Анализатор характеристик объекта контроля 11 и блок устранения опасных участков объекта контроля 14 имеют возможность контактировать с объектом контроля (трубой трубопровода).
Датчики внешней среды 17 и высотомер 25 через блок управления навесным оборудованием 16 подключены к комплексному блоку управления 12; гироскоп 19 и акселерометр 20 через блок стабилизации 18 подключены к комплексному блоку управления 12, подключенному, в свою очередь, к определителю координат GPS/ГЛОНАСС 15. Универсальный мобильный блок питания 24 подключен к контроллеру управления приводами движения и полета 8, приводу с пропеллерами 9, блоку управления осью 6, блоку управления поперечинами 7, анализатору характеристик объекта контроля 11, блоку устранения опасных участков объекта контроля 14, комплексному блоку управления 12, определителю координат GPS/ГЛОНАСС 15, высотомеру 25, датчикам внешней среды 17, гироскопу 19, акселерометру 20 и блоку стабилизации 18. Универсальный стационарный блок питания 23 подключен к компьютеризованному рабочему месту управления 22.
Упомянутое компьютеризованное рабочее место управления содержит компьютеризованное рабочее место пилота, компьютеризованное рабочее место инженера, блок шифрования, приемо-передатчик, Цифровой блок телеметрии и антенный блок с автотрекером. Комплексный блок управления содержит интерфейс, анализатор многомерной информации, блок памяти, приемо-передатчик, автопилот и микроконтроллер управления.
При конкретной реализации устройства упомянутые пропеллеры мультикоптера 9 по командам контроллера управления 8 могут независимо поворачиваться вокруг горизонтальной оси, обеспечивая горизонтальную стабильность. Устойчивое расположение устройства на трубе обеспечено размещением центра тяжести всего устройства ниже подвижной оси платформы.
Кроме того, длина упомянутой оси с креплениями, а также выпуклость и вогнутость поперечин с креплением регулируются при помощи штанг, прикрепленных к оси 4, причем количество регулируемых штанг выбрано из расчета плотности огибания трубы поперечинами с креплением.
Кроме того, упомянутый комплексный блок управления 12 содержит автопилот, приемо-передатчик, анализатор многомерной информации, блок памяти, интерфейс и микроконтроллер управления.
Кроме того, упомянутый анализатор характеристик объекта контроля 11 оборудован датчиками утечек нефтегазовых, химических и радиоактивных веществ.
Кроме того, упомянутые датчики параметров внешней среды 17 выполнены в виде цветной 3D видеокамеры, инфракрасной телекамеры, прибора ночного видения, локатора и анализатора звуковых сигналов.
Кроме того, упомянутый блок устранения опасных участков объекта контроля 14 выполнен в виде пульверизатора нейтрализующего средства.
Устройство иллюстрируется чертежами на фиг. 1-7.
На фиг. 1 представлена структурная схема универсального робота.
На фиг. 2 представлена конструкция универсальной аэродинамической платформы (решетки-колеса).
На фиг. 3 показано сечение трубы и расположение на ней заявленного устройства (робота).
На фиг. 4 приведен пример преодоления препятствия универсальным роботом.
На фиг. 5 представлена структурная схема универсальной аэродинамической платформы.
На фиг. 6 дана структурная схема компьютеризованного рабочего места управления.
На фиг. 7 приведена структурная схема комплексного блока управления.
Устройство (фиг. 1) включает в себя следующие блоки:
1 - универсальная аэродинамическая платформа (УАП);
2 - левый обод (со спицами);
3 - правый обод (со спицами);
4 - ось с креплением (ОК);
5 - поперечины с креплением (ПК);
6 - блок управления осью (БУО);
7 - блок управления поперечинами (БУП);
8 - контроллер управления приводами движения и полета (КУПДП);
9 - приводы с пропеллерами (ПП);
10 - объект контроля (труба);
11 - анализатор характеристик объекта (АХО);
12 - комплексный блок управления (КБУ);
13 - блок разметки опасных участков контроля (БРОУК);
14 - блок устранения опасных участков контроля (БУОУК);
15 - определитель координат GPS/ГЛОНАСС;
16 - блок управления навесным оборудованием (БУНО);
17 - датчики параметров внешней среды (ДВС);
18 - блок стабилизации (БС);
19 - гироскоп;
2 0 - акселерометр;
21 - универсальный пульт управления роботом (УПУР);
22 - стационарное компьютеризованное рабочее место управления (КРМУ);
23 - универсальный стационарный блок питания (УСБП);
24 - универсальный мобильный блок питания (УМБП);
25 - высотомер;
Устройство работает следующим образом.
Робот функционирует в двух режимах: 1) режим подготовки эталонных изображений и формирования программы работы; 2) режим диагностики и выполнения заданных операций.
В первом режиме с компьютеризованного рабочего места управления 22 (КРМУ) через универсальный пульт управления роботом 21 (УПУР) включают все блоки устройства, вводят эталонные изображения (ЭИ) трубы 10 и программу работы устройства. ЭИ формируются, во-первых, в виде электронной карты трубы методом тестированного проезда устройства по трубопроводу, который планируется контролировать (диагностировать), во-вторых, методом компьютерного моделирования трубы.
В процессе подготовки эталонных изображений (ЭИ) через комплексный блок управления 12 (КБУ) включают контроллер управления приводами движения и полета 8 (КУПДП), а также приводы с пропеллерами 9 (ПП) платформы 1, блок управления осью 6 (БУО) и блок управления поперечинами 7 (БУП). При этом блок стабилизации 18 (БС), гироскоп 19, высотомер 25 и акселерометр 20, подключенные к КБУ 12, обеспечивают горизонтальную стабилизацию платформы 1 и ее высоту над объектом контроля. Движение УАП 1 по трубе 10 обеспечивается с помощью ПП 9, КУПДП 8 и КБУ 12. Ширина платформы и глубина ее посадки на трубе изменяется блоком управления осью 6 (БУО) и блоком управления поперечинами 7 (БУП), получающими информацию от КБУ 12. Анализатор характеристик объекта 11 (АХО) передает в память КБУ 12 следующую информацию: диаметр трубы, кривизна трубы, пространственная ориентация (горизонтальное / вертикальное / наклонное расположение), наличие или отсутствие утечек газа/нефтепродуктов/других веществ. Кроме этого, датчики внешней среды 17 (ДВС) фиксируют наличие препятствий на трубе и их координаты. На этом заканчивается формирование эталонного изображения и программы.
В режиме диагностики объекта вышеперечисленные блоки функционируют по программе аналогично этапу подготовки ЭИ, за исключением вновь введенных следующих операций. Включается в работу анализатор характеристик объекта 11, определяющий место и тип утечек. Блок разметки опасных участков 13 (БРОУК), выполненный в виде пульверизатора, использует датчики внешней среды 17 и определитель координат 9 и отмечает цветной жидкостью места утечек веществ. После этого по сигналам КБУ 12 блок устранения опасных участков 14 (БУОУК) устраняет утечки путем цементирования повреждений с помощью пульверизатора.
Информация о расположении и техническом состоянии трубы запоминается блоком памяти и отображается на экранах стационарного компьютеризованного рабочего места управления КРМУ 22 в виде текущей информации (ТИ). В случае необходимости с помощью КРМУ 22 оператор переводит функционирование устройства в автоматизированный (ручной) режим работы.
Все блоки заявленного устройства, кроме УСБП 23, УПУР 21, КРМУ 22 размещаются на мобильной части УАП 1. Электропитание мобильной части устройства осуществляется с помощью универсального мобильного блока питания 24 (УМБП), который состоит из аккумулятора, блока подзарядки на основе комплексного блока солнечной батареи и ветряного мини-энергоблока.
УСБП 23, УПУР 21, КРМУ 22 питаются от универсального стационарного блока питания 23 (УСПБ), который выполнен в виде электрического выпрямителя переменного тока, стабилизатора, блока подзарядки, аккумулятора, комплексного блока солнечной батареи и ветряного мини-энергоблока.
На фиг. 2 представлена перемещаемая часть универсального робота, вид сверху (вид А) и вид сбоку (вид В). Решетка-колесо состоит из следующих элементов:
2 - левый обод (со спицами);
3 - правый обод (со спицами);
4 - ось;
5 - поперечина (с креплением);
26 - подшипник с фиксатором;
27 - фиксирующая гайка;
28 - фиксирующий колпак;
29 - регулирующая штанга.
На фиг. 2 использованы следующие обозначения: Do - диаметр обода; Dмакс - максимальный диаметр решетки (при выпуклом состоянии поперечины); Dмин - минимальный диаметр решетки (при вогнутом состоянии поперечины); lm - ширина решетки (расстояние между левым и правым ободами).
Платформа с колесами собирается соединением левого обода 2 и правого обода 3 с помощью оси 4. Левый и правый обода размещаются в двух подшипниках 2 4 и фиксируются с двух сторон двумя одинаковыми фиксирующими колпаками 28. Решетка-колесо изготовлено из легкого прочного материала (дюраль, титан, металлопластик), а поперечина изготовлена из материала с памятью формы. К оси 4 крепится мультикоптер. При перемещении решетки по трубе устанавливается вогнутое (вовнутрь решетки) состояние поперечины 5. При перемещении по поверхности, имеющей углубление, например, при диагностике желоба, устанавливается выгнутое наружу состояние поперечины 5.
На фиг. 3 показано сечение трубы 10, на которой располагаются универсальная аэродинамическая платформа, собранная в виде решетки с колесами. В процессе диагностики трубы 'решетка с оборудованием перемещается по трубе.
Для устойчивого перемещения робота по трубе необходимо выполнить условие расположения Цт ниже оси 4 (До/2 - половина диаметра обода), где Цт - центр тяжести робота, исходя из чего выбирается диаметр ободов.
На фиг. 3 введены следующие обозначения: hг - глубина посадки решетки на трубе; lд - длина дуги (длина поперечины 5, прилегающей к трубе).
На фиг. 4 робот 30 в процессе диагностики трубы 10 определяет положение препятствия 31 и преодолевает его.
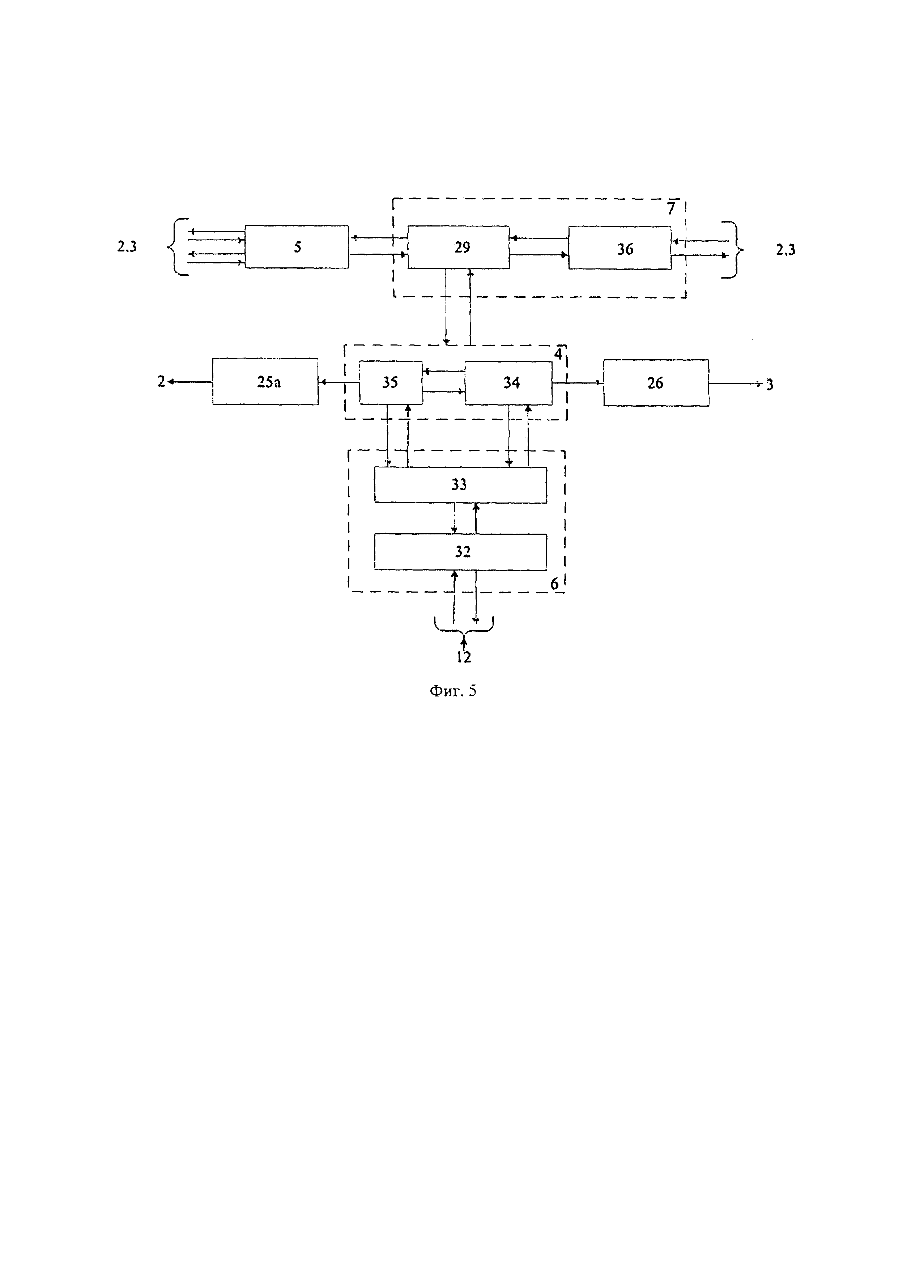
На фиг. 5 представлена структурная схема универсальной аэродинамической платформы; которая включает в себя следующие элементы:
4 - ось с креплением;
5 - поперечины с креплением;
6 - блок управления осью;
7 - блок управления поперечинами;
25а - подшипник с фиксатором (левый);
26 - подшипник с фиксатором (правый);
29 - регулируемые штанги;
32 - первый пульт управления;
33 - электропривод;
34 - винт;
35 - гайка;
36 - второй пульт управления.
Ось с креплением 4 устанавливается в подшипники с фиксаторами, которые крепят соответствующие левый и правый обода со спицами 2, 3. Регулируемые штанги 29 соединяют ось с креплением 4 и поперечины с креплением 5. Согласно схеме, по сигналам от комплексного блока управления 12 через пульт управления 32 включается электропривод 33, который осуществляет вращение соединения гайка 35-винт 34. Этим обеспечивается изменение длины оси 4 (завинчивание соединения уменьшает длину оси; вывинчивание соединения - увеличивает).
Как отмечено выше, анализатор характеристик объекта 11 (АХО) передает КБУ 12 следующую информацию: диаметр трубы, кривизна; трубы, пространственная ориентация (горизонтальное/вертикальное/наклонное расположение), наличие или отсутствие; утечек газа/нефтепродуктов/других веществ, а датчики внешней среды 17 (ДВС) фиксируют наличие препятствий на трубе.
По сигналам от комплексного блока управления 12 через второй пульт управления 3 6 изменяется длина регулируемой штанги 29 и меняется собственно изгиб поперечин с креплением 5, к которым эти регулируемые штанги прикреплены. Регулируемые штанги могут уменьшаться или увеличиваться по длине, так что поперечины 5 будут соответственно изменять изгиб. Количество N регулируемых штанг 29 определяется из расчета плотности огибания поперечин с креплением 5 объекта контроля (трубы трубопровода) 10. Например, число N может выбираться из условия:
3
где Nmax - максимальное количество регулируемых штанг. Nmax выбирается из расчета
где ед - длина дуги окружности трубы или углубления (желоба);
Δ - минимальное расстояние (шаг) размещения штанг на поперечинах (Δ=10…100 мм). Минимальное количество регулируемых штанг должно быть больше трех, что обеспечит надежное перемещение платформы 1 по трубе, желобу или углублению.
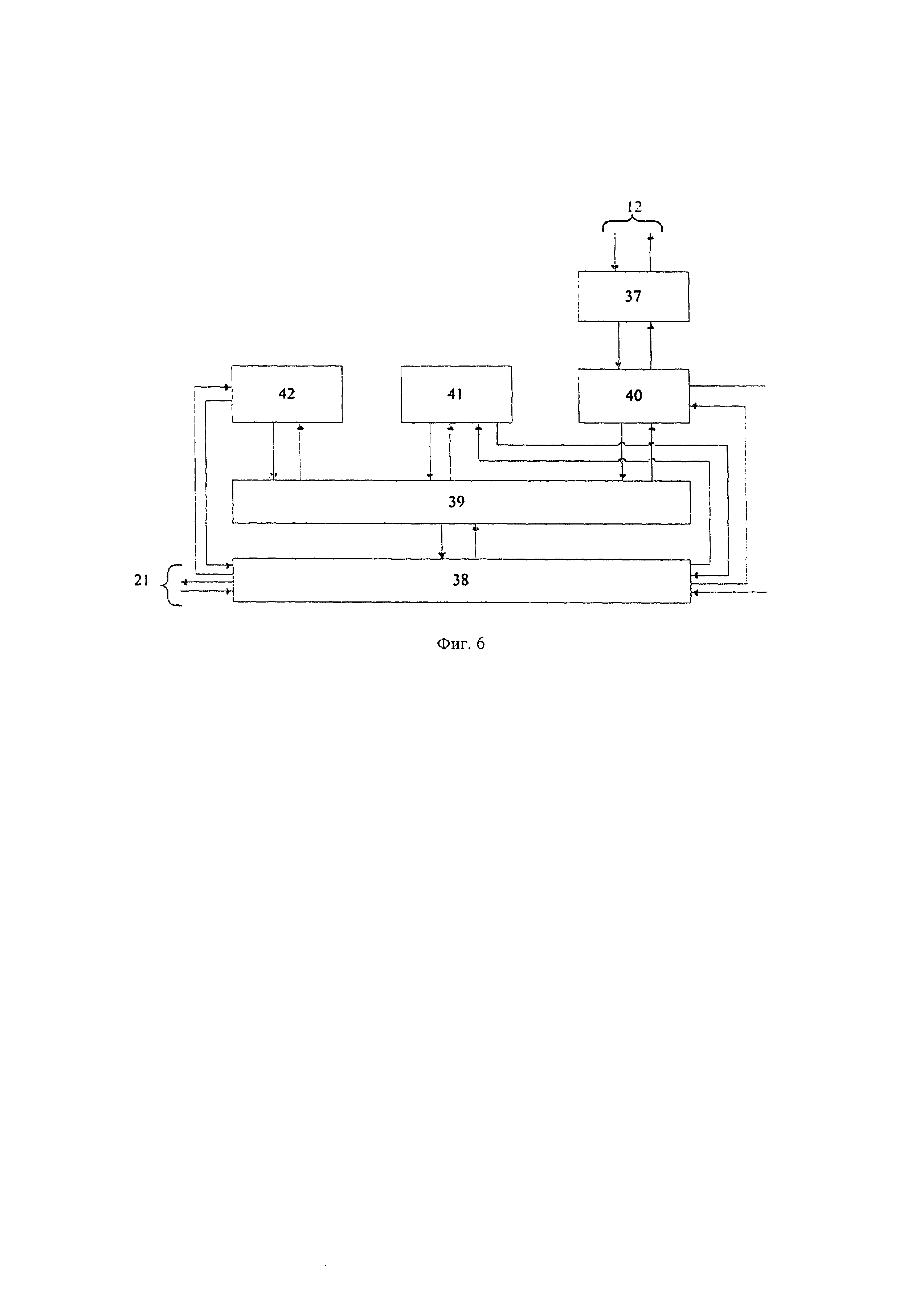
На фиг. 6 приведена структурная схема компьютеризованного рабочего места управления КРМУ 22, которое состоит из следующих блоков:
37 - приемо-передатчик (ПП);
38 - компьютеризованное рабочее место пилота (КРМП);
39 - компьютеризованное рабочее место инженера (КРМИ);
40 - блок шифрования (БШ);
41 - цифровой блок телеметрии (ЦБТ);
42 - антенный блок с автокорректором (АБА).
КРМП 38 управляет движением предлагаемого устройства (робота), а КРМИ 39 обеспечивает управление процессом диагностики трубы. При этом на экране КРМП 38 отображаются навигационные параметры движения робота (координаты, высота, скорость, направление движения и др.) и состояние исследуемого объекта контроля и окружающей территории, а на экране КРМИ 39 воспроизводятся опасные или аварийные участки трубы. Информация от КРМП 38 и КРПИ 39 шифруется блоком БШ 40 и передается через ПП 37 на КБУ 12, что обеспечивает защиту передаваемой информации.
На фиг. 7 дана структурная схема комплексного блока управления 12, который содержит следующие блоки:
43 - интерфейс;
44 - анализатор многомерной информации (АМИ);
45 - блок памяти (БП);
46 - приемо-передатчик (ПП);
47 - микроконтроллер управления (МУ);
48 - автопилот;
Интерфейс 43 воспринимает информацию, поступающую от блока управления навесным оборудованием (БУНО) 16, анализатора характеристик объекта (АХО) 11 и определителя координат GPS/ГЛОНАСС 15. Анализатор многомерной информации (АМИ) 44 распознает визуальную, оптическую, цветную, инфракрасную и звуковую текущую информацию, сравнивая ТИ и ЭИ от БП 45, используя корреляционно-экстремальные, структурно-перестраиваемые и нейро-нечеткие; методы [3-8], и выдает на микроконтроллер управления (МУ) 47 требуемую текущую информацию. Затем МУ 47, используя информацию ПП 37, АМИ 44 и БП 45 вырабатывает управляющие сигналы автопилоту 48, управляющему движением робота в автоматическом режиме.
Предлагаемое устройство имеет значительно лучшие технические характеристики по сравнению с прототипом. Эти преимущества заключаются в следующем:
1. Повышается точность определения координат местоположения устройства за счет введения определителя координат GPS/ГЛОНАСС, гироскопа, акселерометра, блока стабилизации, высотомера, датчика внешней среды, блока управления навесным оборудованием. Высокая точность местоположения устройства достигается использованием дополнительной информации при сравнении текущего и эталонного изображений.
2. Обеспечиваются автоматический и автоматизированный режимы управления устройством. Автоматизированный режим осуществляется оператором с помощью универсального пульта управления и компьютеризованного рабочего места управления. Автоматический режим выполняется по автоматической программе, записанной в память комплексного блока управления, при адаптации этой программы с учетом информации от датчиков внешней среды, высотометра, определителя координат, гироскопа и акселерометра.
3. Расширяются функциональные возможности устройства, заключающиеся, во-первых, в возможности перемещения по трубам различного диаметра за счет изменения (адаптации) ширины и кривизны универсальной аэродинамической платформы к объекту контроля, а также за, счет возможности движения УАП по наклонной или вертикальной трубе, во-вторых, в возможности движения в любое время суток, в способности распознавания и обхода препятствий путем использования информации с датчиков внешней среды (цветной 3D видеокамеры, тепловизора, прибора ночного видения), в-третьих, в подготовке электронной карты объекта контроля (трубы) 10 на территории и техническое состояние трубопровода с помощью анализатора характеристик объекта контроля, в-четвертых, в определении места и типа утечек веществ из трубы и устранением утечек путем цементирования при помощи химического пульверизатора.
4. Увеличение, маневренности и управляемости (приспосабливаемости) предлагаемого устройства к изменяющейся ветровой обстановке (скорости и направления ветра) путем управления блоком приводов и изменения направления тяги и скорости вращения пропеллеров.
5. Увеличение длительности автономного режима работы устройства за счет использования универсального мобильного блока питания и универсального стационарного блока питания, которые включают аккумуляторы и подзарядные блоки на основе солнечных батарей.
6. Улучшение удобства обслуживания устройства оператором и инженером за счет дополнительно введенного компьютеризованного рабочего места управления, сочетанием автоматического и автоматизированного режимов управления роботом.
7. Обеспечение безопасности функционирования устройства путем использования большего объема информации о внешней среде (блоки 11, 12, 15-20, 25), распознавания объектов внешней среды и выработки оптимальных управляющих сигналов (КБУ 12).
Источники:
1. Kalantari A., Spenko М. Design and Experimental Validation of HyTAQ, a Hybrid Terrestrial and Aerial Quadrotor // IEEE International Conference on Robotics and Automation (ICRA), 2013.
2. Торгашев Л.А., Гуцул В.И., Романенко С.В. Разработка и создание робототехнической платформы повышенной проходимости, как элемент обеспечения ликвидации чрезвычайных ситуаций // Вестник науки Сибири. 2013. №4(10). Стр. 104-108.
3. Сырямкин В.И. Информационные устройства и системы в робототехнике и мехатронике: учебное пособие. (Серия: Интеллектуальные технические системы). - Томск: Изд-во Том. ун-та, 2016. - 524 с. (см. стр. 139-236, 424-432, 468-487).
4. Абрамова Т.В., Ваганова Е.В., Горбачев С.В., Сырямкин В.И., Сырямкин М.В. Нейро-нечеткие методы в интеллектуальных системах обработки и анализа многомерной информации. - Томск: Изд-во Том. ун-та. 2014. - 442 с. (см. стр. 9-71, 338-434).
5. Горбачев С.В., Емельянов С.Г., Жданов Д.С, Мирошниченко С.Ю., Сырямкин В.И., Титов Д.В. Цифровая обработка аэрокосмических изображений. - Томск: Изд-во Том. ун-та, 2016. - 304 с. (см. стр. 24-64, 96-211, 250-276).
6. Сырямкин В.И., Соломонов Ю.С, Соломонов. Л.С. и др. Способ управления движущимся объектом и устройство для его осуществления. Патент на изобретение РФ, №247 6825 от 10.03.2011. Публ. 27.02.2013. Бюл. №6.
7. Сырямкин В.И., Шидловский B.C. Корреляционно-экстремальные радионавигационные системы. Томск: Изд-во Том. ун-та, 2010. - 316 с. (см. стр. 73-183).
8. Шумилов В.Н. Принципы функционирования мозга. - Томск: Изд-во Том. ун-та, 2015. - 188 с.
9. Ориентация и навигация подвижных объектов: современные информационные технологии / Под ред. Б.С.Алешина и др. - М.: ФИЗМАТЛИТ, 2006. - 424 с.
10. Бубенчиков М.А. и др. Современные методы исследования материалов и нанотехнологий / Под ред. д.т.н., профессора В. И. Сырямкина. - Томск: Изд-во Том. ун-та. 2010. - 366 с.
11. Богомолов Е.Н. и др. Метрология и сертификация диагностического оборудования и материалов. - Томск: Издательский Дом Томского государственного университета, 2015. - 164.
12. Измерители и анализаторы. [Электронный ресурс] / URL: http://www.rhbz.rti/appendices/measuring-instmments-analyzers.html
13. Патент №2661295 РФ «Устройство для определения и разметки участков территории с химическим и радиоактивным заражением / Гуцул В.И., Сырямкин В.И. и др. Публ. 13.07.2018, Бюл №20».
Реферат
Изобретение относится к гибридным роботам для определения, разметки и ремонта участков трубопроводного транспорта с химическими или радиоактивными утечками. Предложенное устройство выполнено в виде решетки с колесами, на универсальной аэродинамической платформе размещен мультикоптер. Аэродинамическая платформа оборудована осью, на которой установлены два обода со спицами, а также гибкими поперечинами с регулируемыми штангами. На аэродинамической платформе размещено навесное оборудование различного назначения с блоками управления ими, блок управления осью, блок управления поперечинами, коммутирующий комплексный блок управления, блок разметки опасных участков трубы, блок устранения опасных участков трубы, а также блок стабилизации движения. Устройство имеет стационарное рабочее место управления с компьютеризированным рабочим местом пилота и компьютеризированным рабочим местом инженера, стационарный и мобильный блоки питания с подзарядкой. Заявленное изобретение обладает расширенными функциональными возможностями, решает проблемы повышения точности и быстродействия определения координат, оперативности и маневренности, удобства управления, может работать как в управляемом, так и в автономном режимах. 5 з.п. ф-лы, 7 ил.
Формула
Документы, цитированные в отчёте о поиске
Система и способ для инспектирования подводных трубопроводов
Комментарии