Способ сохранения позиции припаркованного транспортного средства и устройство навигации, приспособленное для этого - RU2442221C2
Код документа: RU2442221C2
Чертежи




Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к навигационному устройству, транспортному средству, содержащему такое навигационное устройство, и способу сохранения позиции припаркованного транспортного средства. Также настоящее изобретение относится к вычислительной программе и носителю данных, содержащему такую вычислительную программу.
Уровень техники
Навигационные устройства предшествующего уровня техники, построенные на базе GPS (глобальной системы позиционирования), хорошо известны и широко используются в качестве автомобильных навигационных систем. Такое навигационное устройство, построенное на базе GPS, относится к вычислительному устройству, которое в функциональном соединении с внешним (внутренним) GPS-приемником способно определять собственную глобальную позицию. Кроме того, вычислительное устройство способно определять маршрут между начальным и конечным адресами, которые могут быть введены пользователем вычислительного устройства. В типичном варианте вычислительное устройство способно посредством программного обеспечения вычислять "наилучший" или "оптимальный" маршрут между местоположениями начального и конечного адресов из картографической базы данных. "Наилучший" или "оптимальный" маршрут определяется на основе предварительно определенных критериев и не обязательно является самым быстрым или самым коротким маршрутом.
Навигационное устройство может, в типичном варианте, быть прикреплено на приборную доску транспортного средства, а также может быть реализовано как часть бортового компьютера транспортного средства или автомобильной аудиосистемы. Навигационное устройство также может быть (частью) носимой системой, например PDA.
Используя позиционную информацию, получаемую от GPS-приемника, вычислительное устройство может определять на регулярной основе собственную позицию и может отображать текущую позицию транспортного средства пользователю. Навигационное устройство может содержать устройства памяти для хранения картографических данных и дисплей для отображения выбранной части картографических данных.
Кроме того, оно может предоставлять инструкции, как следовать определенному маршруту посредством соответствующих навигационных указаний, отображаемых на дисплее и/или формируемых в качестве звуковых сигналов из динамиков (например, "поверните налево через 100 метров"). Графика, изображающая действия, которые должны быть выполнены (например, стрелка влево указывает поворот налево впереди), может быть отображена в строке состояния, а также может быть самостоятельно наложена на соответствующие развязки дорог/повороты и т.п. на карте.
Хорошо известна способность автомобильных навигационных систем предоставлять возможность водителю, когда он ведет автомобиль вдоль маршрута, вычисленного навигационной системой, инициировать повторное вычисление маршрута. Это полезно, когда на пути автомобиля встречаются дорожные работы или большой автомобильный затор.
Также хорошо известна способность предоставлять возможность пользователю выбирать тип алгоритма вычисления маршрута, применяемого навигационной системой, путем выбора, например, "нормального" режима и "быстрого" режима (который вычисляет маршрут в кратчайшее время, но не исследует множество альтернативных маршрутов, как в нормальном режиме).
Также хорошо известна возможность предоставления вычисления маршрута с заданными пользователем критериями, например, пользователь может предпочесть обзорный маршрут, который должен быть вычислен устройством. Программное обеспечение устройства затем вычисляет различные маршруты и оценивает наиболее предпочтительные из них, которые содержат вдоль маршрута наибольшее число точек интереса (известные как POI), которые отмечены, например, как являющиеся живописной архитектурой.
Целью является улучшение состояния уровня техники устройств навигации.
Раскрытие изобретения
Аспект заявленного изобретения предоставляет навигационное устройство, содержащее процессор, причем навигационное устройство выполнено с возможностью
- обнаруживать постановку на стоянку транспортного средства, и, когда обнаружена постановка на стоянку,
- определять информацию относительно позиции припаркованного транспортного средства, и
- сохранять информацию относительно позиции припаркованного транспортного средства. Сохраненная информация может быть использована позже, чтобы найти припаркованное транспортное средство.
Согласно варианту осуществления устройство навигации содержит устройство памяти и устройство позиционирования, процессор выполнен с возможностью связываться с устройством памяти и устройством позиционирования, и
- информация относительно позиции припаркованного транспортного средства определяется с помощью устройства позиционирования, и
- информация относительно позиции припаркованного транспортного средства сохраняется в устройстве памяти.
Согласно варианту осуществления постановка на стоянку транспортного средства обнаруживается посредством обнаружения того, что связь или взаимодействие между навигационным устройством и транспортным средством и/или док-станцией (стационарным устройством для подключения навигационного устройства с целью зарядки аккумуляторов и/или передачи данных в/из навигационного устройства) прервана. Это легкий и надежный способ определить постановку транспортного средства на стоянку. Это, например, может быть определено с помощью любого одного : кнопки запуска, датчика близости, датчика соприкосновения.
Согласно варианту осуществления определение и сохранение информации, касающейся позиции припаркованного транспортного средства, с помощью устройства позиционирования, по меньшей мере частично, делается после того, как обнаружена постановка на стоянку транспортного средства. Эта информация может быть использована, чтобы передвигаться обратно к припаркованному транспортному средству. Это непрерывное определение позиционных данных может быть сделано с помощью, по меньшей мере, одного из: акселерометра, гироскопа, инерционного датчика.
Согласно варианту осуществления навигационное устройство выполнено с возможностью
- находить сохраненную информацию относительно позиции припаркованного транспортного средства в устройстве памяти и предоставлять навигационные инструкции от текущей позиции до позиции припаркованного транспортного средства.
Согласно аспекту изобретение относится к транспортному средству, содержащему навигационное устройство согласно приведенному выше описанию.
Согласно аспекту изобретение относится к способу сохранения позиции припаркованного транспортного средства, содержащему:
- обнаружение постановки транспортного средства на стоянку, и, когда постановка на стоянку обнаружена,
- определение информации относительно позиции припаркованного транспортного средства, и
- сохранение информации относительно позиции припаркованного транспортного средства.
Согласно варианту осуществления способ содержит:
- поиск сохраненной информации относительно позиции припаркованного транспортного средства и
- предоставление навигационных инструкций от текущей позиции до позиции припаркованного транспортного средства.
Согласно аспекту изобретение относится к вычислительной программе, которая, когда загружена в компьютер, дает возможность выполнять вышеописанный способ.
Согласно аспекту изобретение относится к носителю данных, содержащему вычислительную программу, описанную выше.
Краткое описание чертежей
Варианты осуществления настоящего изобретения будут описаны, только в качестве примера, со ссылкой на сопроводительные схематические чертежи, в которых соответствующие ссылочные символы указывают соответствующие части, и на которых:
Фиг.1 схематически представляет схематическую блок-схему навигационного устройства;
Фиг.2 схематически представляет схематический вид навигационного устройства;
Фиг.3 схематически изображает вид сбоку навигационного устройства согласно варианту осуществления изобретения,
Фиг.4 схематически изображает вид сбоку навигационного устройства согласно варианту осуществления изобретения,
Фиг. 5 и 6 схематически изображают блок-схемы согласно вариантам осуществления.
Подробное описание
Фиг.1 показывает схематическую блок-схему варианта осуществления навигационного устройства 10, содержащего процессор 11 для выполнения арифметических операций. Процессор 11 выполнен с возможностью соединяться с блоками памяти, которые хранят инструкции и данные, такими как жесткий диск 12, постоянное устройство памяти (ROM) 13, электрически стираемое программируемое постоянное устройство памяти (EEPROM) 14 и оперативное устройство памяти (RAM) 15. Устройства 12, 13, 14, 15 памяти могут содержать картографические данные 22. Эти картографические данные могут быть двумерными картографическими данными (широта и долгота), но также могут содержать третье измерение (высоту). Картографические данные могут дополнительно содержать дополнительную информацию, например информацию о бензиновых/газовых заправочных станциях, точках интереса. Картографические данные могут также содержать информацию о форме зданий и объектов вдоль дороги.
Процессор 11 также может быть выполнен с возможностью соединяться с одним или более устройств ввода, такими как клавиатура 16 или мышь 17. Клавиатура 16 может, например, быть виртуальной клавиатурой, представленной на дисплее 18, который является экраном, чувствительным к прикосновению. Процессор 11 может дополнительно быть выполнен с возможностью связываться с одним или более устройств вывода, таким как дисплей 18, динамик 29, и одним или более блоков 19 считывания для того, чтобы считывать, например, флоппи-диски 20 или CD ROM 21. Дисплей 18 может быть традиционным компьютерным дисплеем (например, ЖК) или может быть дисплеем проекционного типа, таким как расположенный на уровне лобового стекла дисплей, используемый для проецирования инструментальных данных на лобовое стекло или ветровой щиток автомобиля. Дисплей 18 может также быть дисплеем, выполненным с возможностью функционировать как чувствительный к прикосновению экран, что позволяет пользователю вводить инструкции и/или информацию посредством прикосновения к дисплею 18 своим пальцем.
Динамик 29 может быть реализован как часть навигационного устройства 10. В случае, когда навигационное устройство 10 используется как автомобильное навигационное устройство, навигационное устройство 10 может использовать динамики автомобильной аудиосистемы, бортового компьютера или подобное.
Процессор 11 дополнительно может быть выполнен с возможностью связываться с устройством 23 позиционирования, таким как GPS-приемник, который предоставляет информацию относительно позиции навигационного устройства 10. Согласно этому варианту осуществления устройство 23 позиционирования - это устройство 23 позиционирования, построенное на базе GPS. Тем не менее, следует понимать, что навигационное устройство 10 может быть реализовано любым типом технологии определения местоположения и не ограничено GPS. Оно может быть реализовано с помощью других видов GNSS (спутниковая система глобальной навигации), такой как Европейская система Галилео. Также оно не ограничено системами определения положения/скорости на спутниковой основе и также может быть развернуто с помощью наземных маяковых сигналов или любых других видов систем, которые позволяют устройству определять свое географическое положение.
Тем не менее, следует понимать, что они могут быть представлены с другими или отличными по количеству устройствами памяти, устройствами ввода и устройствами считывания, хорошо известными специалистам в данной области техники. Кроме того, один или несколько этих устройств могут быть физически расположены удаленно от процессора 11, если потребуется. Процессор 11 показан как один блок, однако он может содержать несколько процессоров, функционирующих параллельно и управляемых одним главным процессором, который может быть расположен удаленно от других, как хорошо известно специалистам в данной области техники.
Навигационное устройство 10 показано как вычислительная система, но может быть любой системой обработки сигналов с аналоговой и/или цифровой, и/или программной технологией, выполненной с возможностью выполнять функции, описываемые в данном документе. Следует понимать, что, несмотря на то, что навигационное устройство 10 показано на фиг.1 как множество компонентов, навигационное устройство 10 может быть реализовано как единое устройство.
Навигационное устройство 10 может использовать навигационное программное обеспечение, например навигационное программное обеспечение Navigator от компании TomTom B.V. Программное обеспечение Navigator может запускаться на PDA-устройстве Pocket PC с чувствительным к прикосновению экраном (например, для управления стилусом), таком как Compaq iPaq, или на любом другом устройстве, которое имеет встроенный GPS-приемник 23. Объединенная система PDA и GPS-приемника сконструирована для того, чтобы использоваться в качестве автомобильной навигационной системы. Варианты осуществления также могут быть осуществлены в любой другой форме навигационного устройства 10, например в виде GPS-приемника/компьютера/дисплея, или устройства, сконструированного для использования вне транспортного средства (например, для пешеходов) или в транспортных средствах, отличных от автомобиля (например, в самолетах).
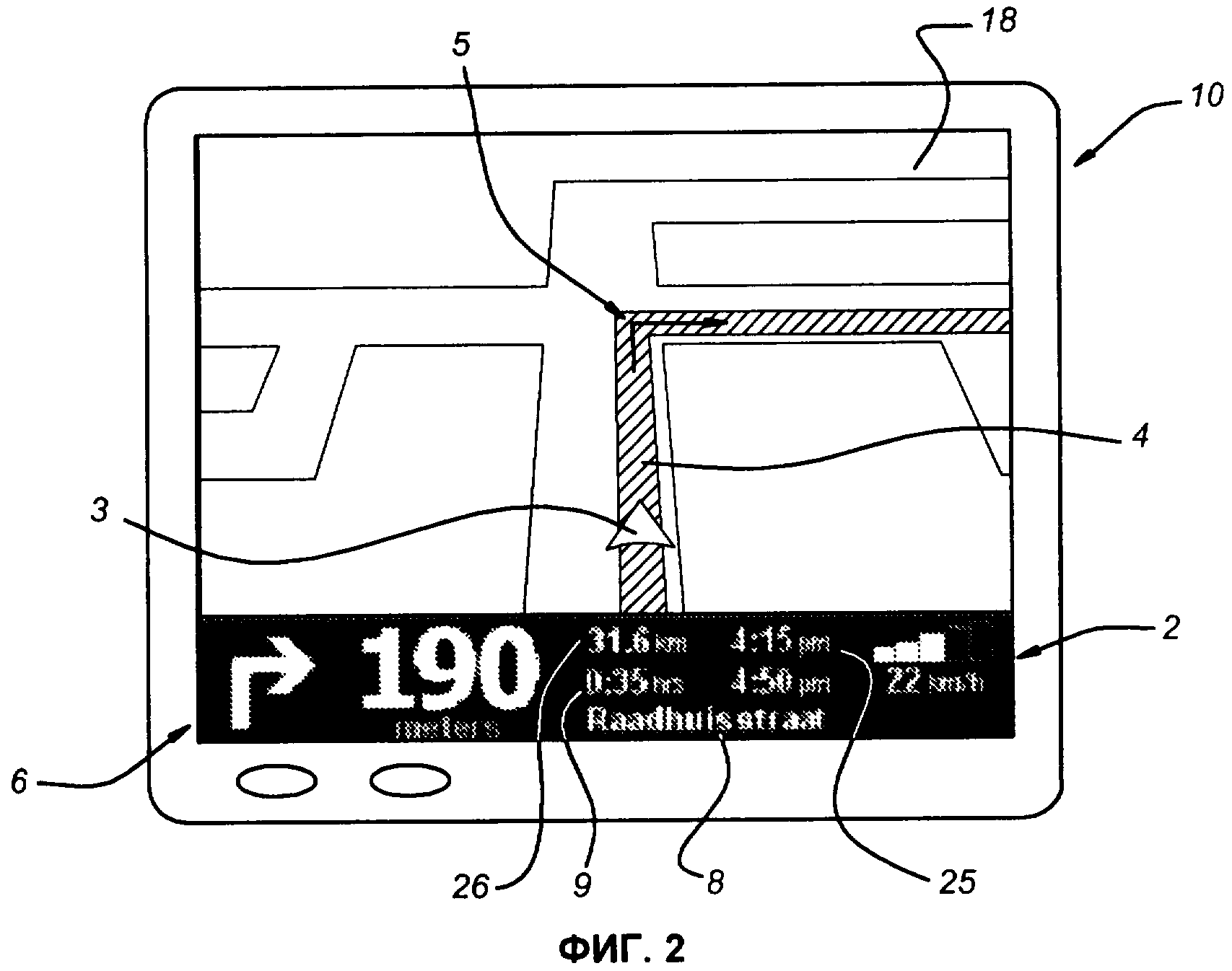
Фиг.2 показывает навигационное устройство 10, описанное выше.
Навигационное программное обеспечение, когда запущено в навигационном устройстве 10, отображает экран нормального навигационного режима на дисплее 18, как показано на фиг. 2. Этот вид может предоставлять инструкции для управления транспортным средством с помощью комбинации текста, символов, голосовых подсказок и перемещаемой карты. Ключевые элементы пользовательского интерфейса следующие: 3D карта, занимающая большую часть экрана. Отметим, что карта также может быть показана как 2D карта.
Карта показывает позицию навигационного устройства 10 и его непосредственное окружение, вращаемое таким образом, что направление, в котором навигационное устройство 10 перемещается, всегда направлено "вверх". Строка 2 состояния может проходить через экран в нижней четверти экрана. Текущее положение навигационного устройства 10 (которое навигационное устройство определило самостоятельно с помощью традиционного GPS-определения положения) и его ориентация (которая выводится из направления движения) показаны позиционной стрелкой 3. Маршрут 4, вычисленный устройством (с помощью алгоритмов вычисления маршрута, сохраненных в устройствах 11, 12, 13, 14, 15 памяти в качестве применяемых к картографическим данным, сохраненным в картографической базе данных в устройствах 11, 12, 13, 14, 15 памяти), показан как затемненный путь. На маршруте 4 все основные действия (например, закругления поворотов, пересечения дорог, круговые развязки и т.п.) схематически изображены стрелкой 5, наложенной поверх маршрута 4. Строка 2 состояния также включает в себя с левой стороны схематическую иконку, изображающую следующее действие 6 (в данном случае поворот направо). Строка 2 состояния также показывает расстояние до следующего действия 6 (например, поворот направо - здесь расстояние составляет 50 м) как извлеченное из базы данных всего маршрута, вычисленного устройством (т.е. из списка всех дорог и связанных предпринимаемых действий, задаваемых маршрутом). Строка 2 состояния также показывает название текущей дороги 8, оставшееся до конца поездки время 9 (в данном случае 2 минуты 40 секунд), актуальное оценочное время 25 прибытия (11:36) и расстояние до цели 26 (1,4 км). Строка 2 состояния может дополнительно показывать дополнительную информацию, например мощность GPS-сигнала в виде индикатора мощности стилем подобно используемому в мобильных телефонах.
Как уже упомянуто выше, навигационное устройство может содержать устройство ввода, такое как чувствительный к прикосновению экран, который позволяет пользователю вызывать навигационное меню (не показано). Из этого меню могут быть инициированы и управляться другие навигационные функции. Разрешение выбора навигационных функций из экрана меню, которые сами по себе очень легко вызываются (например, одним действием от отображения карты до экрана меню), значительно упрощает взаимодействие пользователя и делает его более быстрым и простым. Навигационное меню включает в себя варианты для ввода пользователем места назначения.
Фактическая физическая структура навигационного устройства 10 сама по себе фундаментально может не отличаться от любого традиционного карманного компьютера за исключением встроенного GPS-приемника 23 или GPS-данных, получаемых от внешнего GPS-приемника. Следовательно, устройства 12, 13, 14, 15 памяти хранят алгоритмы вычисления маршрута, картографическую базу данных и программное обеспечение пользовательского интерфейса; процессор 12 интерпретирует и обрабатывает пользовательский ввод (например, с помощью чувствительного к прикосновению экрана) для того, чтобы ввести начальный и конечный адреса и все другие входные команды управления), и применяет алгоритмы вычисления маршрута для того, чтобы вычислить оптимальный маршрут. "Оптимальность" может ссылаться на критерий, например наименьшее время или наикратчайшее расстояние, или некоторые другие связанные с пользователем факторы.
Более конкретно, пользователь вводит свою начальную позицию и требуемое место назначения в навигационное программное обеспечение, запущенное на навигационном устройстве 10, с помощью предоставленных устройств ввода, таких как чувствительный к прикосновению экран 18, клавиатура 16 и т.п. Пользователь затем выбирает способ, которым будет вычислен маршрут: предлагаются различные режимы, например "быстрый" режим, который вычисляет маршрут очень быстро, но маршрут может не быть кратчайшим; "полный" режим, который просматривает все возможные маршруты и выделяет кратчайший, но дольше по времени вычисления, и т.п. Возможны другие варианты с заданным пользователем маршрутом, который является живописным, например проходит через множество POI (точек интереса), которые помечены как виды с живописной архитектурой, или проходят через множество POI возможного интереса для детей, или используется наименьшее число пересечений дорог и т.д.
Сами дороги описываются в картографической базе данных, которая является частью навигационного программного обеспечения (или иным образом доступна для него), запущенного на навигационном устройстве 10, как линии, т.е. векторы (например, начальная точка, конечная точка, направление для дороги, полностью дорога составлена из многих сотен таких секций, каждая уникально задана параметрами начальной точки/конечной точки, направления). Карта затем составляется из таких векторов дорог плюс точки интереса (POI), плюс названия дорог, плюс другие географические элементы, такие как границы парков, границы рек и т.п., все они задаются в терминах векторов. Все картографические элементы (например, векторы дорог, POI и т.п.) задаются в координатной системе, которая соответствует или относится к координатной системе GPS, давая возможность поместить позицию устройства, как определенную через GPS-систему, на соответствующую дорогу, показанную на карте.
Вычисление маршрута использует сложные алгоритмы, которые являются частью навигационного программного обеспечения. Алгоритмы применяются для того, чтобы подсчитать большое количество потенциальных разных маршрутов. Навигационное программное обеспечение затем оценивает их по заданному пользователем критерию (или по настройкам по умолчанию устройства), такому как сканирование в полном режиме с маршрутом по живописным местам, старинные музеи и без камер измерения скорости. Маршрут, который наилучшим образом соответствует заданным критериям, затем вычисляется процессором 11 и затем сохраняется в базе данных в устройствах 12, 13, 14, 15 памяти как последовательность векторов, названий дорог и действий, которые необходимо выполнить на конечной точке вектора (например, соответствующих предварительно заданным расстояниям вдоль каждой дороги на маршруте, например через 100 метров поворот налево на улицу х).
Навигационные устройства часто используются в транспортных средствах, таких как автомобили, мотоциклы и т.д., чтобы предоставлять водителю инструкции, чтобы передвигаться к пункту назначения. Однако зачастую невозможно достичь пункта назначения с помощью используемого транспортного средства. При поездке в театр на автомобиле автомобиль зачастую ставится на стоянку на значительном расстоянии от театра, например на крытой автостоянке или площадке для парковки. Также, когда оплачивается поездка в центр города или совершается прогулка пешком в лес, автомобиль ставится на стоянку в определенном местоположении, в то время как оставшаяся часть путешествия/визита проходится пешком. Можно привести множество примеров, в которых пользователь оставляет его/ее транспортное средство и продолжает его/ее путешествие пешком или с помощью другого типа перемещения, такого как велосипед, местный автобус или поезд, беря с собой навигационное устройство.
Согласно варианту осуществления предоставлено навигационное устройство, которое обнаруживает и сохраняет позицию, где припарковано транспортное средство.
Согласно варианту осуществления навигационное устройство установлено, чтобы использоваться в транспортном средстве, таком как автомобиль. Такое навигационное устройство поэтому может быть оборудовано, чтобы связываться или взаимодействовать с автомобилем. Это соединение или взаимодействие может быть физическим, например через док-станцию или через соединение питания, но может также быть беспроводной линией связи с частями автомобиля. Это соединение или взаимодействие может использоваться навигационным устройством 10, чтобы обнаружить позицию постановки на стоянку транспортного средства.
Док-станция
Навигационное устройство 10 может, например, быть выполнено с возможностью пристыковываться в док-станции 30, такой как подставка. Согласно варианту осуществления навигационное устройство 10 выполнено с возможностью обнаруживать, что оно пристыковано к док-станции 30. Следовательно, навигационное устройство 10 выполнено с возможностью обнаруживать позицию постановки на стоянку транспортного средства, обнаруживая географическое положение, где навигационное устройство 10 не пристыковано, т.е. где соединение или взаимодействие с транспортным средством и/или док-станцией 30 прервано.
Фиг.3 схематически изображает вид сбоку навигационного устройства 10, которое пристыковано к док-станции 30. Док-станция 30 может быть сформирована как часть приборной панели 40 транспортного средства, или док-станция 30 может быть выполнена с возможностью соединяться с приборной панелью 40 транспортного средства (не показано). Док-станция 30 может, однако, также быть съемной док-станцией, которая может прикрепляться к поверхности, такой как стекло, с помощью присоски.
Между навигационным устройством 10 и док-станцией 30 функционируют соединители 31, чтобы обеспечить физическое соединение между навигационным устройством 10 и транспортным средством. Эти соединители 31 могут быть электрическими соединителями. Может быть предложено и использовано множество различных соединителей, как следует понимать специалисту в данной области техники.
Соединители 31 могут содержать соединитель (или линию), который обеспечивает постоянное питание от батареи, или соединитель (или линию), который предоставляет информацию о мощности зажигания, которая существует, только когда зажигание транспортного средства включено.
Навигационное устройство 10 может быть выполнено с возможностью принимать (электрическую) энергию от автомобиля через соединители 31, например от (аккумулятора) батареи автомобиля. Навигационное устройство 10 может также содержать электрические соединители, чтобы устанавливать одно- или двухстороннюю линию связи между навигационным устройством 10 и автомобилем.
В случае, когда используется односторонняя линия связи, навигационное устройство 10 может, например, принимать входные данные от транспортного средства, такие как состояние зажигания, состояние освещения.
На основе вышеуказанных примеров навигационное устройство 10 выполнено с возможностью обнаруживать, присоединено или нет навигационное устройство 10 к док-станции 30. Например, когда навигационное устройство 10 обнаруживает, что (электрическая) мощность больше не подводится к навигационному устройству 10 через один из соединителей 31, когда соединение прервано, навигационное устройство 10 может сохранить текущую позицию навигационного устройства 10, которая измерена устройством 23 позиционирования, в устройствах 12, 13, 14, 15 памяти и может пометить ее как "позиция припаркованного транспортного средства". Или навигационное устройство 10 может сохранить последнюю доступную информацию относительно позиции навигационного устройства 10, которая определена устройством 23 позиционирования, как "позицию постановки на стоянку", если позиция была потеряна перед выключением зажигания (полезно на подземной стоянке).
Также, когда навигационное устройство 10 обнаруживает, что одно- или двухсторонняя линия связи больше не представлена через соединители 31, навигационное устройство 10 может сохранять текущую позицию навигационного устройства 10, которая определена устройством 23 позиционирования, в устройствах 12, 13, 14, 15 памяти.
Таким образом, когда водитель ставит на стоянку его/ее транспортное средство и продолжает его/ее путешествие без транспортного средства, водитель отсоединяет от док-станции навигационное устройство 10. Это обнаруживается навигационным устройством 10, и навигационное устройство 10 определяет текущую позицию транспортного средства/навигационного устройства 10 с помощью устройства 23 позиционирования и сохраняет определенную позицию в устройствах 12, 13, 14, 15 памяти. Эта позиция может быть отмечена как "позиция припаркованного транспортного средства".
Согласно варианту осуществления взаимодействие между навигационным устройством 10 и транспортным средством может быть реализовано беспроводной связью. Согласно такому варианту осуществления постановка на стоянку транспортного средства может быть определена, когда линия беспроводной связи прервана или мощность сигнала падает ниже конкретного предварительно определенного порогового значения. Когда линия беспроводной связи прервана или мощность сигнала упала ниже порогового значения, навигационное устройство 10 может заключить, что оно отсоединено от док-станции.
Также навигационное устройство 10 может также проверить, присоединено ли оно беспроводным образом к док-станции того же транспортного средства. После того как оно обнаруживает, что оно беспроводным образом присоединено к док-станции другого транспортного средства, навигационное устройство 10 может обнаружить постановку на стоянку транспортного средства (предыдущего транспортного средства).
Выключение
Согласно варианту осуществления навигационное устройство 10 может быть выполнено с возможностью хранить самую последнюю доступную позицию, определенную устройством 23 позиционирования, как "позицию припаркованного транспортного средства", когда навигационное устройство 10 выключается. Когда пользователь ставит на стоянку его/ее транспортное средство и продолжает свое путешествие пешком, он/она зачастую выключает навигационное устройство 10, чтобы взять его с собой. Согласно этому варианту осуществления навигационное устройство 10 сохраняет эту позицию как "позицию припаркованного транспортного средства". Это позволяет пользователю легко передвигаться назад к его/ее транспортному средству, как будет пояснено ниже.
Согласно этому варианту осуществления навигационное устройство 10 не нужно присоединять во время путешествия и отсоединять от док-станции, когда транспортное средство ставится на стоянку. Навигационное устройство 10 помнит последнюю позицию, где оно было включено последний раз.
На основе вышесказанного следует понимать, что навигационное устройство 10, использующее комбинацию обнаружения операции отсоединения от док-станции и выключения, будет успешным, когда пользователи паркуют его/ее транспортное средство, выключают навигационное устройство 10, отсоединяют от док-станции навигационную систему 10 в произвольном порядке.
Обнаружение зажигания
Согласно альтернативному варианту осуществления навигационное устройство 10 может, например, быть выполнено с возможностью обнаруживать зажигание транспортного средства. Чтобы сделать это, транспортное средство может быть снабжено блоком 52 детектора зажигания, который может располагаться вблизи замочной скважины 51, выполненной с возможностью принимать ключ 50 зажигания. Уже известны навигационные устройства 10, которые могут обнаруживать, включено или нет зажигание транспортного средства. Следует понимать, что это не означает, что двигатель транспортного средства работает, но если зажигание выключено, двигатель также выключен.
Такой детектор 52 зажигания может быть выполнен с возможностью обнаруживать, когда зажигание выключается, например, на основе ориентации ключа 50 зажигания или воспринимая, что ток и/или напряжение присутствует в определенном месте в схеме. Согласно дополнительному альтернативному варианту осуществления детектор 52 зажигания может просто быть детектором, приспособленным обнаруживать присутствие ключа 50 зажигания в замочной скважине 51, например, с помощью емкостного или индуктивного датчика, который обнаруживает присутствие ключа 50 зажигания поблизости.
Информация о зажигании или присутствии ключа 50 зажигания может быть передана навигационному устройству 10 через линию 53 связи. Это может быть проводная линия 53 связи, как схематически изображено на фиг.4, но также может быть беспроводная линия связи.
Таким образом, когда зажигание транспортного средства выключается, или ключ 50 зажигания удаляется, навигационное устройство 10 запускается через линию 53 связи с тем, чтобы определить текущую позицию транспортного средства/навигационного устройства 10 с помощью устройства 23 позиционирования и сохранить определенную позицию в устройствах 12, 13, 14, 15 памяти и пометить ее как "позицию припаркованного транспортного средства".
Кнопка разъединения
Следует понимать, что навигационное устройство 10 может также обнаружить, присоединено оно к док-станции или нет, альтернативными способами. Например, навигационное устройство 10 может содержать кнопку разъединения снаружи, которая нажимается док-станцией 30, когда навигационное устройство 10 присоединяется, и отпускается, когда навигационное устройство 10 отсоединяется. На основе позиции кнопки разъединения навигационное устройство 10 может определить, присоединено оно к док-станции или нет. После того как навигационное устройство 10 определяет, что оно отсоединено от док-станции, оно может сохранить текущую позицию в устройстве 12, 13, 14, 15 памяти и пометить ее как "позиция припаркованного транспортного средства".
Также навигационное устройство 10 может быть соединено с док-станцией 30 посредством механизма-защелки. Следовательно, навигационное устройство 10 может содержать кнопку разъединения, которая должна нажиматься пользователем, чтобы механически освободить навигационное устройство 10 из док-станции 30.
Нажатие этой кнопки разъединения может также запустить навигационное устройство 10, чтобы определить текущую позицию транспортного средства/навигационного устройства 10 с помощью устройства 23 позиционирования и сохранить определенную позицию в устройствах 12, 13, 14, 15 памяти и пометить ее как "позицию припаркованного транспортного средства".
Конечно, вместо кнопки разъединения могут быть задуманы многие вариации, такие как бесконтактный датчик, который измеряет, находится или нет навигационное устройство 10 поблизости от док-станции 30 или нет. Также контактный датчик может использоваться, который измеряет, находится ли навигационное устройство 10 в соприкосновении с док-станцией 30 или нет. Такие датчики могут использоваться, чтобы обнаруживать постановку на стоянку транспортного средства, когда навигационное устройство уходит из окрестности док-станции 30 или соприкосновение с док-станцией 30 прервано.
Анализ позиционных данных
Согласно дополнительному варианту осуществления навигационное устройство 10 выполнено с возможностью определять позицию, где транспортное средство припарковано, на основе анализа позиционной информации, измеренной устройством 23 позиционирования. Таким образом, когда навигационное устройство 10 отсоединяется от док-станции, но не выключается, навигационное устройство 10 может обнаружить, как навигационное устройство 10 движется после постановки на стоянку. На основе этого анализа навигационное устройство 10 может определить, перемещается ли пользовать, например, на машине или пешком. Когда навигационное устройство 10 определяет, что пользователь изменил перемещение на машине на перемещение пешком, навигационное устройство 10 может сохранить позицию, где пользователь заменил машину на пешеходное перемещение, в устройстве 12, 13, 14, 15 памяти и отметить ее как "позицию припаркованного транспортного средства".
Например, навигационное устройство 10 может сравнивать позицию навигационного устройства 10, измеренную устройством 23 позиционирования, с картографическими данными, сохраненными в устройстве 12, 13, 14, 15 памяти. На основе такого анализа навигационное устройство 10 может определить, что пользователь перемещается по маршруту, который сохранен как пеший маршрут. На основе этого навигационное устройство 10 определяет, что пользователь, скорее всего, путешествует пешком.
Навигационное устройство 10 может также быть выполнено с возможностью определять, путешествует ли пользователь пешком или на машине, исключительно на основе позиционной информации, измеренной устройством 23 позиционирования, например, на основе измеренной скорости, количества поворотов и т.д. Например, если скорость падает ниже 5 км/ч, навигационное устройство 10 может решить, что пользователь путешествует пешком, а не на машине. Также, если навигационное устройство 10 измеряет относительно большое число крутых поворотов, навигационное устройство 10 может решить, что пользователь путешествует пешком, а не на машине. Навигационное устройство 10 может обнаружить постановку на стоянку транспортного средства, анализируя, по меньшей мере, одно из: скорости навигационного устройства 10, количества поворотов, крутизны поворотов.
На основе этого варианта осуществления навигационное устройство 10 выполнено с возможностью определять позицию, где пользователь переходит с первого способа перемещения (например, на машине) на второй способ перемещения (например, пешком или на велосипеде), на основе позиционных данных, измеренных устройством 23 позиционирования и, возможно, картографических данных, сохраненных в устройстве 12, 13, 14, 15 памяти, и сохраняет позицию перехода в устройстве 12, 13, 14, 15 памяти, отмеченную как "позицию припаркованного транспортного средства".
Потеря сигнала устройством позиционирования
Согласно дополнительному варианту осуществления навигационное устройство 10 выполнено с возможностью обнаруживать позицию постановки на стоянку транспортного средства, когда транспортное средство припарковывается на крытой автостоянке, например на подземной автостоянке или крытой автостоянке в здании. На такой крытой автостоянке устройство 23 позиционирования может потерять свой сигнал, такой как, например, GPS-сигнал. Там, где используется термин GPS, он будет означать, что также могут быть использованы и другие системы позиционирования и сигналы позиционирования.
Навигационное устройство 10 может быть выполнено с возможностью сохранять позицию, где измерен последний достоверный GPS-сигнал, в устройствах 12, 13, 14, 15 памяти и пометить ее как "позицию припаркованного транспортного средства". Когда пользователь хочет вернуться к своему транспортному средству, навигационное устройство 10 может найти эту позицию в устройстве 12, 13, 14, 15 памяти и направить пользователя ко входу на крытую автостоянку.
Конечно, GPS-сигнал может также быть потерян в других обстоятельствах, например когда навигационное устройство 10 входит в туннель. Также GPS-сигнал может быть потерян в результате других случаев, например при плохих погодных условиях. В этих случаях навигационное устройство 10 может по ошибке сохранить позицию, где измерен последний достоверный GPS-сигнал, в устройствах 12, 13, 14, 15 памяти и ошибочно пометить ее как "позицию припаркованного транспортного средства".
Чтобы предотвратить неправильное сохранение "позиции припаркованного транспортного средства", навигационное устройство 10 может быть выполнено с возможностью обнаруживать только постановку на стоянку транспортного средства и сохранять "позицию припаркованного транспортного средства", когда устройство 23 позиционирования теряет свой сигнал, и скорость транспортного средства ниже предварительно определенного порогового значения. Используя такое пороговое значение скорости, навигационное устройство 10 не будет обнаруживать постановку на стоянку транспортного средства, когда транспортное средство въезжает в туннель на автостраде (с относительно высокой скоростью), и будет обнаруживать постановку на стоянку транспортного средства, когда транспортное средство въезжает на подземную крытую автостоянку или крытую автостоянку внутри здания.
Вышеуказанное может не работать в случае, когда транспортное средство находится в заторе и въезжает в туннель. Однако навигационное устройство 10 может связываться с сервером трафика, и навигационное устройство 10 может не обнаруживать постановку на стоянку транспортного средства, если последняя определенная позиция навигационного устройства 10 совпадает с сообщенным затором и транспортное средство не двигается или двигается медленно.
Однако некорректное обнаружение постановки на стоянку транспортного средства негативно не повлияет на производительность этого варианта осуществления, поскольку после того как пользователь фактически ставит на стоянку его/ее транспортное средство на более поздней стадии внутри крытой автостоянки, ранее ошибочно сохраненная "позиция припаркованного транспортного средства" будет перезаписана навигационным устройством 10 правильной "позицией припаркованного транспортного средства", являющейся позицией входа на крытую автостоянку.
Согласно дополнительному варианту осуществления навигационное устройство 10 выполнено с возможностью обнаруживать и сохранять позицию, где оно поймало GPS-сигнал после его потери, и сохранить ее как "позицию припаркованного транспортного средства", так как эта позиция будет, вероятно, пешеходным выходом/входом на крытую автостоянку. Согласно этому варианту осуществления пользователь направляется назад к пешему выходу/входу на крытую автостоянку, который обычно является гораздо более подходящим, чем въезд для транспортных средств.
В этом случае навигационное устройство 10 может быть выполнено с возможностью измерять временной интервал между потерей GPS-сигнала и восстановлением GPS-сигнала. Навигационное устройство 10 может быть выполнено с возможностью сохранять только позицию, где GPS-сигнал снова восстановлен, если временной интервал между потерей и восстановлением находится в конкретном предварительно определенном "безопасном временном интервале". Временной интервал не должен быть слишком большим, например 10 минут. Также позиция восстановленного GPS-сигнала предпочтительно находится на определенном расстоянии от позиции, где GPS-сигнал был потерян.
Согласно дополнительному варианту осуществления навигационное устройство 10 выполнено с возможностью сравнивать сохраненную "позицию припаркованного транспортного средства" с картографическими данными, сохраненными в устройствах 12, 13, 14, 15 памяти, чтобы увидеть, совпадает ли сохраненная "позиция припаркованного транспортного средства" с местоположением крытой автостоянки, содержащимся в картографических данных. Если так, навигационное устройство 10 может найти местоположение пешеходного выхода/входа на крытую автостоянку в картографических данных и сохранить эту позицию как "позицию припаркованного транспортного средства", чтобы направить пользователя обратно к пешеходному входу/выходу на крытую автостоянку.
Также устройство 23 позиционирования может содержать дополнительные устройства позиционирования, такие как акселерометр/гироскоп/инерционный датчик и т.д., чтобы измерить позиционные данные между потерей сигнала устройством 23 позиционирования и последующим восстановлением сигнала устройством 23 позиционирования. Эта информация может использоваться, чтобы получить позицию припаркованного транспортного средства внутри подземной автостоянки или автостоянки внутри здания.
Если "позиция припаркованного транспортного средства" была получена с помощью акселерометра/гироскопа/инерционного датчика и т.д., навигационное устройство 10 может продолжить использовать акселерометр/гироскоп/инерционный датчик и т.д., чтобы обнаруживать траекторию пользователя до тех пор, пока устройство 23 позиционирования не восстановит правильный сигнал, такой как правильный GPS-сигнал. Обнаруженная траектория может быть сохранена в устройствах 12, 13, 14, 15 памяти, чтобы обеспечить пользователя инструкциями для того, чтобы направлять его обратно к транспортному средству, как также будет объяснено ниже.
Записанные данные/траектория могут быть воспроизведены, чтобы направить пользователя к автомобилю в местах, где GPS-сигнал недоступен (подземная автостоянка, например).
Схема последовательности операций
Фиг.5 схематически изображает схему последовательности операций, показывающей действия, которые могут последовательно выполняться навигационным устройством 10 согласно варианту осуществления, описанному выше, со ссылкой на фиг.3 и 4. В первом действии 100 навигационное устройство 10 обнаруживает, что транспортное средство припарковано. Это может быть реализовано многими разными способами, например, как обсуждалось выше, таким как обнаружение того, что навигационное устройство 10 отсоединено от док-станции, обнаружение того, что зажигание выключено, обнаружение того, что ключ зажигания удален, обнаружение того, что GPS-сигнал потерян и т.д.
Когда обнаружена постановка на стоянку транспортного средства, в следующем действии 101 навигационное устройство 10 управляет устройством 23 позиционирования, чтобы определить позицию транспортного средства, например, с помощью GPS. Конечно, такое устройство 23 позиционирования может находиться в режиме, в котором оно определяет позицию непрерывно или с регулярными интервалами. В этом случае навигационному устройству 10 не нужно инструктировать устройство 23 позиционирования выполнять измерение, а можно просто считать самое последнее определение позиции, которое выполнено устройством 23 позиционирования.
В следующем действии 102 навигационное устройство 10 сохраняет позицию, которая определена в действии 101, в устройстве 12, 13, 14, 15 памяти и помечает позицию как "позицию припаркованного транспортного средства". Конечно, позицию не нужно дословно помечать как "позиция припаркованного транспортного средства", следует понимать, что может использоваться любая подходящая метка.
Запись после постановки на стоянку
После того как навигационное устройство 10 сохранило позицию в устройствах 12, 13, 14, 15 памяти, помеченную как "позиция припаркованного транспортного средства", навигационное устройство 10 может продолжить запись позиции навигационного устройства 10 (если не отключено) и сохранять ее в устройстве 12, 13, 14, 15 памяти. Это изображено на фиг.5 с помощью действия 103, которое является необязательным действием.
Эта непрерывная запись последующих позиций навигационного устройства 10 может использоваться, чтобы направлять обратно к "позиции припаркованного транспортного средства" без использования картографических данных, направляя пользователя обратно к транспортному средству по непрерывно сохраняемым позициям. Таким образом, пользователь направляется обратно к его/ее транспортному средству по тому же маршруту, по которому он/она следовал от его/ее транспортного средства. Это может быть полезно, когда пользователь продолжает его/ее путешествие в области, в которой картографические данные не доступны, или в случаях, когда навигационное устройство 10 не приспособлено вычислять маршрут на основе картографических данных, сохраненных в устройстве 12, 13, 14, 15 памяти, а является только устройством обзора карты. Передвижение обратно к позиции припаркованного транспортного средства может быть сделано несколькими способами, как будет описано более подробно ниже.
Конечно, непрерывная запись позиций навигационного устройства 10 после сохранения "позиции припаркованного транспортного средства" может быть сделана с помощью устройства 23 позиционирования, использующего GPS-измерения. Однако устройство 23 позиционирования может также использовать другие технологии. Устройство 23 позиционирования может, например, также содержать акселерометр/гироскоп/инерционный датчик и т.п. Конечно, устройство 23 позиционирования может также содержать комбинацию различных технологий позиционирования.
Также непрерывная запись позиции навигационного устройства 10 после сохранения "позиции припаркованного транспортного средства" может быть сделана навигационным устройством 10, даже когда оно находится в спящем режиме. Такой спящий режим может быть режимом, в котором частота процессора 11 может быть понижена, чтобы сохранить энергию.
Согласно варианту осуществления измерения, выполненные акселерометром/гироскопом/инерционным датчиком и т.д., могут быть сохранены и использованы, чтобы направлять пользователя обратно к его/ее припаркованному транспортному средству в ситуациях, когда GPS-сигнал недоступен в окрестностях позиции постановки на стоянку, такой как, например, на крытой автостоянке.
Передвижение обратно
Когда пользователь хочет вернуться к его/ее транспортному средству, он может сделать это, командуя навигационному устройству 10 перемещение к "позиции припаркованного автомобиля", которая сохранена в устройстве 12, 13, 14, 15 памяти. Пользователь может, например, запустить навигационное устройство 10, чтобы двигаться к "позиции припаркованного транспортного средства", выбирая необязательную опцию в меню, например указанную как "поиск транспортного средства".
Выбирая такую опцию меню, навигационное устройство 10 ищет "позицию припаркованного транспортного средства" в устройстве 12, 13, 14, 15 памяти и облегчает передвижение к этой позиции. Передвижение к "позиции припаркованного транспортного средства" может быть сделано различными способами, из которых несколько будут описаны здесь в качестве примера.
Согласно варианту осуществления навигационное устройство 10 может быть выполнено с возможностью направлять пользователя на "позицию припаркованного транспортного средства", используя текущую позицию навигационного устройства 10 в качестве начальной позиции и "позицию припаркованного транспортного средства" в качестве требуемого пункта назначения. Программное обеспечение навигации, которое работает на навигационном устройстве 10, может затем применить вычисление маршрута (см. выше), чтобы вычислить маршрут от начальной позиции до "позиции припаркованного транспортного средства" с помощью картографических данных, сохраненных в устройстве 12, 13, 14, 15 памяти, как хорошо известно специалистам в данной области техники.
Навигационное устройство 10 может быть выполнено с возможностью обеспечивать пользователя вариантом выбора способа перемещения (пешком, на велосипеде…), чтобы перемещаться от текущей позиции до "позиции припаркованного транспортного средства". Однако, когда пользователь выбрал вариант меню "поиск транспортного средства", навигационное устройство 10 может автоматически выбрать способ перемещения, например пешком.
Согласно дополнительному варианту осуществления текущая позиция навигационного устройства находится в области, для которой подробные картографические данные не сохранены, т.е. где векторы дорог и т.д. не доступны для того, чтобы вычислять маршрут при включенном вычислении. В этом случае навигационное устройство 10 не способно вычислить маршрут от текущей позиции до "позиции припаркованного транспортного средства", когда пользователь выбирает опцию меню "поиск транспортного средства". Следовательно, навигационное устройство 10 может быть выполнено с возможностью показывать текущую позицию на карте вместе с "позицией припаркованного транспортного средства" и/или указанием направления, в котором пользователь должен двигаться, чтобы достичь "позиции припаркованного транспортного средства".
Согласно варианту осуществления навигационное устройство 10 выполнено с возможностью направлять пользователя назад от текущей позиции навигационного устройства 10 до "позиции припаркованного транспортного средства", воспроизводя последовательные позиции навигационного устройства 10, которые записаны в устройстве 12, 13, 14, 15 памяти после сохранения "позиции припаркованного транспортного средства" (см. действие 103 на фиг.5). Это может быть полезным вариантом осуществления в случаях, когда подробные картографические данные недоступны. Пользователь может, например, направляться по записанным последовательным позициям навигационного устройства 10 посредством показа стрелки на дисплее 18, указывающей направление к следующей записанной позиции.
Согласно дополнительному варианту осуществления текущая позиция навигационного устройства 10 находится в области, где GPS-сигнал не может быть принят. Например, пользователь может быть в лесу или торговом центре, где чистый GPS-сигнал не принимается. Также транспортное средство может быть припарковано на подземной автостоянке. В этом случае навигационное устройство 10 может использовать измерения, которые записаны акселерометром, как описано выше, чтобы направлять пользователя от текущей позиции до "позиции припаркованного транспортного средства".
Согласно варианту осуществления навигационное устройство 10 не содержит программного обеспечения для вычисления маршрута, а является устройством, только просматривающим карту, содержащим устройство 23 позиционирования. Такое навигационное устройство 10 может использоваться, чтобы отображать текущую позицию пользователя на дисплее 18 вместе с "позицией припаркованного транспортного средства", когда пользователь выбирает опцию меню "поиск транспортного средства".
Схема последовательности операций
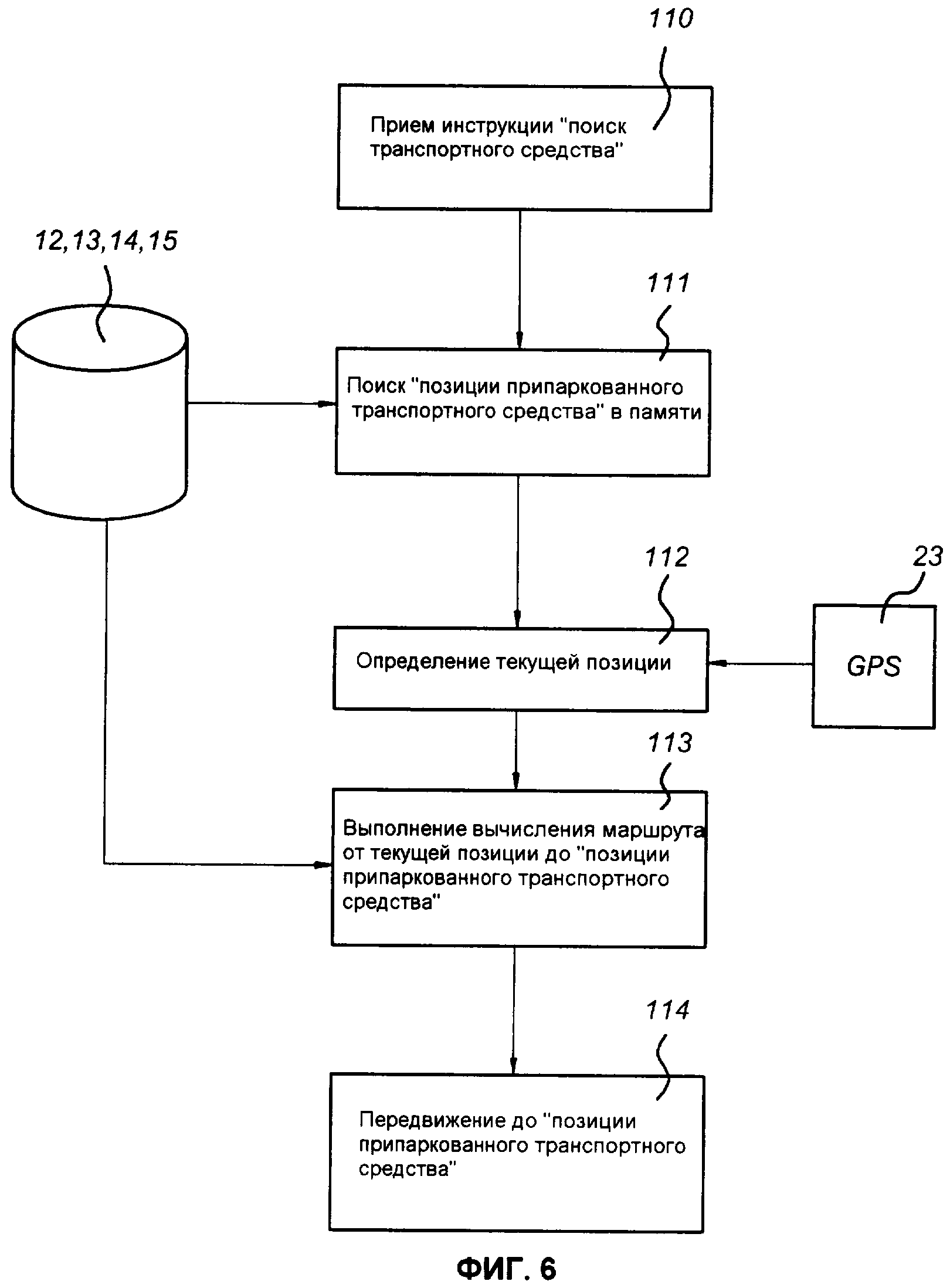
Фиг.6 схематически изображает схему последовательности операций, показывающей действия, которые могут последовательно выполняться навигационным устройством 10 согласно варианту осуществления, описанному выше относительно передвижения назад к "позиции припаркованного транспортного средства".
В первом действии 110 процессор 11 принимает инструкцию, чтобы перемещаться назад к транспортному средству, например, в форме инструкции "поиск транспортного средства". После того как процессор 11 принимает эту инструкцию, он ищет сохраненную "позицию припаркованного транспортного средства" в устройстве 12, 13, 14, 15 памяти в действии 111.
В следующем действии 112 он инструктирует устройство 23 позиционирования определять текущую позицию навигационного устройства 10. Конечно, устройство 23 позиционирования может быть выполнено с возможностью непрерывно определять позицию навигационного устройства 10 или с постоянными временными интервалами. В этом случае навигационному устройству 10 не нужно инструктировать устройство позиционирования определять текущую позицию, а можно просто считать самое последнее определение позиции, которое выполнено устройством 23 позиционирования.
На основе текущей позиции навигационного устройства 10 (начальной позиции) и "позиции припаркованного транспортного средства" (пункта назначения) навигационное устройство 10 может вычислить маршрут до "позиции припаркованного транспортного средства" с помощью вычисления маршрута, как хорошо известно специалистам в данной области техники.
Конечно, возможны многие вариации. Навигационное устройство 10 может, например, выполнить действия, которые изображены на фиг.5 и 6, в другом порядке.
Дополнительные замечания
Когда пользователь ставит на стоянку его/ее транспортное средство и продолжает его/ее путешествие без транспортного средства, он/она удаляет навигационное устройство 10 из транспортного средства, чтобы взять его с собой. Как только навигационное устройство 10 обнаруживает, что транспортное средство припарковано, навигационное устройство 10 определяет текущую позицию навигационного устройства 10 с помощью устройства 23 позиционирования и сохраняет эту позицию в устройствах 12, 13, 14, 15 памяти. Эта позиция может быть отмечена, например, как "позиция припаркованного транспортного средства".
Навигационное устройство 10 может обнаружить, что автомобиль припаркован, поскольку оно обнаруживает, что оно удалено из док-станции 30 или обнаруживает, что зажигание выключено и т.д.
Следует понимать, что это не является проблемой, если навигационное устройство 10 неправильно запускается для сохранения определенной позиции как "позиции припаркованного транспортного средства" (например, когда навигационное устройство расстыковывается во время путешествия), поскольку неправильно сохраненная "позиция припаркованного транспортного средства" перезаписывается в более позднее время правильной "позицией припаркованного транспортного средства".
Когда пользователь навигационного устройства 10 хочет снова найти его/ее автомобиль, он/она запускает навигационное устройство 10, чтобы найти "позицию припаркованного транспортного средства" в устройстве 12, 13, 14, 15 памяти и начать передвижение к этой позиции. Пользователь может, например, запустить навигационное устройство 10, чтобы передвигаться к "позиции припаркованного транспортного средства", выбирая специальную опцию в меню, например, указанную как "поиск транспортного средства".
Следует понимать, что термин "транспортное средство", в качестве используемого в этом тексте, может ссылаться на все виды транспорта, например автомобили, мотоциклы, велосипеды и т.д.
Дополнительно, следует понимать, что навигационное устройство может быть загружено с вычислительной программой, чтобы выполнять один или более из вариантов осуществления, описанных выше. Вычислительная программа может содержать инструкции, считываемые процессором 11, которые управляют процессором 11, чтобы выполнять один или более из вариантов осуществления, описанных выше.
Согласно дополнительному варианту осуществления навигационное устройство 10 может содержать "ручной" режим сохранения позиции. Такой режим предоставляет пользователю через пользовательский интерфейс (например, через дисплей 18) опцию сохранения текущей позиции навигационного устройства 10, которая определена устройством 23 позиционирования, и отметки ее как "позиции припаркованного транспортного средства". Навигационное устройство 10 может, например, предоставить виртуальную кнопку через сенсорный экран. Это может быть сделано, даже когда зажигание включено и/или навигационное устройство 10 присоединено к док-станции.
Согласно варианту осуществления навигационное устройство 10 может быть выполнено с возможностью сохранять ряд последних "позиций припаркованного транспортного средства" в устройстве 12, 13, 14, 15 памяти в списке истории. Такой список истории последних "позиций припаркованного транспортного средства" может быть добавлен к списку "любимых позиций постановки на стоянку" либо автоматически, либо по запросу/подтверждению пользователя. Навигационное устройство 10 может также хранить статистику о том, как часто пользователь паркуется в том же месте или местах, расположенных близко друг к другу. Такие "позиции припаркованного транспортного средства" могут быть автоматически добавлены в список точек интереса (POI). Список POI может быть организован в разных категориях, таких как "любимые" или "точки постановки на стоянку". Список истории может также быть динамическим списком недавних "позиций припаркованного транспортного средства".
Сохраненные "позиции припаркованного транспортного средства" могут повторно использоваться, когда навигационное устройство 10 используется, чтобы перемещаться к позиции поблизости от уже сохраненной "позиции припаркованного транспортного средства". Это уменьшает время прокладки маршрута. Также пользователь будет направлен к местам постановки на стоянку, с которыми он/она уже хорошо знаком, таким образом пользователь находит его/ее место постановки на стоянку и/или его/ее припаркованное транспортное средство более простым образом.
Это может также помочь в передвижении обратно к одному из предыдущих мест постановки на стоянку, если пользователь что-то забыл и/или вынужден идти туда опять. Если это место постановки на стоянку является новым для пользователя, существует высокая вероятность, что он/она не найдет это место второй раз без такого списка истории "позиций припаркованного транспортного средства".
Поскольку конкретные варианты осуществления изобретения были описаны выше, следует признать, что изобретение может быть осуществлено на практике другими способами, чем были описаны. Например, изобретение может принимать форму вычислительной программы, содержащей одну или множество последовательностей машиночитаемых инструкций, описывающих способ, раскрытый выше, или носителя хранения данных (например, полупроводниковая память, магнитный или оптический диск), имеющего подобную вычислительную программу, сохраненную на нем. Как следует понимать специалистам в данной области техники, все программные компоненты также могут быть реализованы в виде аппаратных компонентов.
Вышеприведенные варианты осуществления изобретения рассматриваются в качестве иллюстративных, а не ограничивающих. Таким образом, для специалистов в данной области техники очевидно, что могут быть реализованы модификации описанного изобретения без отступления от объема формулы изобретения, приведенной ниже.
Реферат
Группа изобретений относится к технике навигации. При парковке транспортного средства навигационное устройство определяет и сохраняет его позицию. Сохраненная информация может быть повторно использована позже, чтобы найти припаркованное транспортное средство. С использованием данной группы изобретений облегчается поиск транспортных средств на парковке. 3 н. и 13 з.п. ф-лы, 6 ил.
Формула
устройство (12, 13, 14, 15) памяти,
устройство (23) позиционирования,
процессор (11) выполнен с возможностью связываться с устройствами (12, 13, 14, 15) памяти и устройством (23) позиционирования,
при этом навигационное устройство выполнено с возможностью:
обнаруживать постановку на стоянку транспортного средства и, когда постановка на стоянку обнаружена,
определять информацию относительно позиции припаркованного транспортного средства, используя устройство позиционирования, и
сохранять информацию относительно позиции припаркованного транспортного средства в устройстве памяти,
отличающееся тем, что навигационное устройство выполнено с возможностью обнаруживать постановку на стоянку транспортного средства посредством сравнения позиционных данных с картографическими данными, сохраненными в устройстве памяти.
извлекать сохраненную информацию относительно позиции припаркованного транспортного средства из устройства (12, 13, 14, 15) памяти и предоставлять навигационные инструкции от текущей позиции до позиции припаркованного транспортного средства.
сохранять информацию относительно позиции припаркованного транспортного средства в списке истории, содержащем множество "позиций припаркованного транспортного средства".
обнаруживают постановку на стоянку транспортного средства и, когда постановка на стоянку обнаружена,
определяют информацию относительно позиции припаркованного транспортного средства, и
сохраняют информацию относительно позиции припаркованного транспортного средства,
отличающийся тем, что обнаруживают постановку на стоянку транспортного средства посредством сравнения позиционных данных с картографическими данными, сохраненными в устройстве памяти.
извлекают сохраненную информацию относительно позиции припаркованного транспортного средства и
предоставляют навигационные инструкции от текущей позиции до позиции припаркованного транспортного средства.
Документы, цитированные в отчёте о поиске
Система для парковки транспортных средств
Комментарии