Способ определения ориентации по изображениям участков звездного неба - RU2749580C1
Код документа: RU2749580C1
Чертежи

Описание
Изобретение относится к способам определения ориентации по координатам наблюдаемых звезд, преимущественно для навигационных целей. В частности, для аэро и космической навигации путем определения положения летательного аппарата относительно изображений звезд, наблюдаемых на небесной сфере в поле зрения звездного датчика.
С появлением космических аппаратов активно разрабатываются и совершенствуются новые средства и методы навигации по наблюдениям звезд. Высокие скорости перемещения космических аппаратов диктуют высокие требования к оперативности таких определений, особенно на начальном участке после выведения на орбиту, когда положение аппарата неизвестно.
В настоящее время приборы звездной ориентации стали основным средством космической навигации. Конструкция типичного звездного датчика ориентации содержит входную оптику, которая ограничивает поле зрения прибора, матричного фотоприемника и электронного блока определения ориентации с бортовым каталогом звезд (В.И. Федосеев, М.П. Колосов Оптико-электронные приборы ориентации и навигации космических аппаратов М. Логос, 2007 г.)
Требования к этим приборам для звездной ориентации и обзор наиболее применяемых звездных датчиков представлен в публикациях, например, (А.И. Захаров, М.Е. Прохоров, М.С. Тучин, А.О. Жуков Минимальные технические характеристики звездного датчика ориентации, необходимые для достижения заданной погрешности Астрофизический бюллетень, 2013, том 68, №4)
Эффективность звездной ориентации определяется выбором параметров используемого прибора (угловой размер поля зрения, дискретность и чувствительность фотоприемной матрицы, скорость работы процессора и др.), выбором алгоритма определения ориентации, а также объемом и структурой бортового каталога звезд.
Сложность определения ориентации заключается в том, что в поле зрения прибора звездной ориентации попадают только несколько звезд, а их привязка к координатной системе и положение космического аппарата в момент наблюдения неизвестно. Поэтому, главным локальным признаком для определения звезд всегда было опознавание известных созвездий по их форме и нахождение звезды по месту в нем. Традиционно для этого использовались известные навигационные созвездия. (Л.М. Воробьев Астрономическая навигация летательных аппаратов Изд. Машиностроение, 1968 г.)
Известны способы определения ориентации по наблюдениям звезд, реализуемые в навигационных приборах. Сущность этих методов заключается в том, что наблюдают группу звезд в поле зрения прибора звездной ориентации, которые образующих треугольник, измеряют расстояния между звездами и по величине этих расстояний находят в бортовом каталоге соответствующую группу звезд и их координаты, а относительно них определяют положение оптической оси прибора звездной ориентации. Сложность заключается в том, как найти этот треугольник среди множества других на звездном небе.
Из всего многообразия алгоритмов идентификации, как наиболее быстродействующие, используют геометрические. Идея геометрических алгоритмов заключается в составлении из звезд, попавших в поле зрения объектива, различных геометрических фигур, в которых в качестве базовых характеристик для распознавания используются межзвездные угловые расстояния, сферические углы, образуемые звездами на небесной сфере, отношения сторон, периметры, площади и прочие характеристики, с последующим сравнением их с таковыми же, но полученными для звезд из каталога, заранее записанными в память компьютера (С.В. Гайворонский, Е.В. Русина, В.В. Цодокова Идентификация звезд при определении астрономических координат автоматизированным зенитным телескопом Научно-технический вестник информационных технологий, механики и оптики Том 15, №1, 2015 г.)
Принцип выбора операций для распознавания групп звезд основывается на вычислении угловых расстояний между звездами в наблюдаемой группе и сравнении этих расстояний с таковыми же, но вычисленными для звезд из каталога. При этом реализуют процесс перебора и сравнения для каждой пары наблюдаемых звезд и соответствующего им углового расстояния с расстояниями между звездами из каталога. (А.В. Иванов, Д.Ю. Пашенцев, Р.В. Тишкин, Алгоритмы идентификации звездных узоров в задаче уточнения элементов внутреннего ориентирования. Вестник Самарского государственного аэрокосмического университета №4, 2012 г.)
Известны варианты решения задачи селекции звезд для осуществления ориентации космических аппаратов по звездам, а также обобщенное описание метода отбора звезд, основанного на критерии постоянства взаимных угловых расстояний. Отбор звезд для распознавания может осуществляться на основании критерия максимального правдоподобия путем перебора всех возможных сочетаний. Авторы сами отмечают трудоемкость выполнения и сложность его реализации. (И.С. Кружилов, О.Ю. Шамаев, Алгоритм селекции звезд по постоянству угловых расстояний. Программные продукты и системы. №3, 2009 г.)
Технология распознавания звезд на основе перебора звездных треугольников подробно описана также в (И.В. Соловьев Алгоритмы оценки ориентации и угловой скорости космического аппарата с помощью звездного датчика Авиакосмическое приборостроение №7, 2013 г.)
Основным недостатком всех этих способов является именно необходимость перебора большого числа параметров в бортовом каталоге для нахождения требуемой конфигурации звезд. При большом числе звезд в бортовом каталоге, даже при большой скорости процессора этот перебор занимает некоторое время, что может быть критично для космического аппарата. А при наличии существенных ошибок измерений наблюдаемого датчиком положения звезд, такой поиск может и не завершится.
Известны также различные аналитические способы выполнения поиска, позволяющие повысить эффективность определения ориентации по звездам. Однако, эти способы не решают проблем необходимости перебора вариантов и ориентации на начальном этапе выведения, а также дополнительно увеличивают объем требуемых определений.
При рассмотрении перспектив развития приборов звездной ориентации отмечается, что подход к выбору оптики звездных приборов пока остается неизменным, а в блоках электроники используют высокопроизводительные микропроцессоры, программируемые логические интегральные схемы (ПЛИС) со специальным математическим обеспечением. Для эффективного определения ориентации важным ставится важное требование многократного сокращения объема обрабатываемой на борту информации. Прибор должен представлять собой функционально законченное устройство и иметь при этом весьма малые габариты и низкое энергопотребление. Их дальнейшее развитие по пути улучшения эксплуатационных характеристик возможно путем совершенствования схемных решений и программно-математического обеспечения. (Г.А. Аванесов, Р.В. Бессонов, А.А. Форш, М.И. Куделин Анализ современного состояния и перспектив развития приборов звездной ориентации семейства БОКЗ, Известия вузов. Приборостроение. 2015 г., Т. 58, №1).
Основным недостатком большинства технологий определения ориентации по звездам является необходимость выполнения перебора данных бортового каталога для идентификации звезд. При больших объемах данных это может быть очень затратной процедурой. Для исключения необходимости перебора было предложено формировать признаковое пространство на основе расстояний между звездами и производить идентификацию по координатам межзвездных расстояний в этом пространстве. (Барке В.В., Венкстерн А.А., Котцов В.А., Захаров А.И. Способ определения звездной ориентации, не требующий перебора бортового каталога. // Шестая Всероссийская научно-техническая конференция «Современные проблемы определения ориентации и навигации космических аппаратов». Таруса, 10-13 сентября 2018. Сборник трудов М: ИКИ РАН, 2019, стр. 232-241) http://ofo.ikiweb.ru/publ/conf_2018_st.pdf/
Прототипом предлагаемого решения, наиболее близким по технической сущности, является способ определения ориентации по изображениям участка звездного неба по (Патент РФ 2638077 МПК G01C 21/02, G01C 21/24 // Бюллетень изобретений №35, 2017 г). Он заключается в том, что вместо нахождения перебором подобия конфигураций звездных узоров, осуществляется переход от реального пространства измеренных координат наблюдаемых звездных к признаковому пространству, построенному на локальных измерениях расстояний между звездами, и прямому нахождению звезд в этом пространстве с их признаковыми координатами. А признаковые координаты используют в качестве адреса звезды в бортовом каталоге, где находят ее пространственные координаты на небе.
Для этого предварительно составляют и запоминают бортовой каталог координат звезд ограничивая выбор звезд звездной величиной отображаемой используемой системой наблюдения, при этом каждую звезду характеризуют значениями расстояний между ближайшими звездами, по результатам этих определений формируют признаковое многомерное координатное пространство, координаты которого используют в качестве адреса бортового каталога для данной звезды, по которому находят ее пространственные координаты на небе.
Затем в процессе определения ориентации получают изображение участка звездного неба, выбирают звезду в центральной части поля зрения и выполняют такие же измерения межзвездных расстояний по окрестности этой звезды на изображении участка звездного неба, после чего по этим полученным измерениям определяют положение искомой точки в признаковом пространстве и находят ее координаты в бортовом каталоге, а по ее пространственным координатам записанным в каталоге определяют ориентацию, учитывая положение этой звезды на изображении в приборной системе координат.
Недостатком прототипа является большой размер формируемого признакового пространства и, соответственно, большой объем памяти требуемый для хранения информации бортового каталога звезд, а также для выполнения нем поисковых операций.
Целью изобретения является повышение эффективности способа определения звездной ориентации за счет уменьшения размера признакового пространства для сокращения объема хранения бортового каталога и снижения затрат поиска.
Сущность предлагаемого технического решения заключается в том, что при задании адресов для составления бортового каталога с пространственными координатами звезд на небе, а также при последующем выполнении определений по изображениям звездного неба, координаты звезд в формируемом признаковом пространстве представляют остатком от их деления на коэффициент уменьшения, задаваемого для каждого координатного направления.
Предлагаемый способ определения ориентации по изображениям участков звездного неба заключается в том, что, как и в прототипе, предварительно составляют и запоминают бортовой каталог с пространственными координатами звезд, задавая адреса звезд в этом каталоге на основе координат этих звезд в сформированном признаковом пространстве расстояний. Однако, в предлагаемом способе преобразуют это признаковое пространство следующим образом. Предварительно задают коэффициент уменьшения по каждому направлению координат в признаковом, а затем выполняют преобразование путем деления координат признакового пространства на этот коэффициент по каждому из направлений, а в качестве координат звезд в преобразованном признаковом пространстве, используют остаток, полученный от этого деления, и из полученных новых значений координат звезд составляют адрес звезды в бортовом каталоге. Затем по этому адресу находят каталожные пространственные координаты звезды на небе.
А в процессе ориентации по изображению участка звездного неба, также как в прототипе, выбирают на нем звезду в центральной части поля зрения и определяют ее положение в приборной системе координат, затем выбирают соседние с ней звезды и, также как при составлении бортового каталога, определяют попарные расстояния между звездами по их изображениям, а затем, используя полученные измерения, вычисляют координаты выбранной звезды в преобразованном признаковом пространстве. Для этого, как и при формировании бортового каталога, выполняют деление измеренных межзвездных расстояний на те же коэффициенты уменьшения по каждому из направлений, и по остаткам от деления определяют адрес в бортовом каталоге, по которому находят пространственные координаты звезды, а по найденным координатам звезды с учетом ее положения на изображении в приборной системе координат определяют ориентацию на момент наблюдений.
Такой подход к преобразованию признакового пространства основан на хорошо разработанной в математике модулярной арифметике, которая широко используется в различных приложениях, выполняемых в остаточных классах. Эта технология описана в многочисленных публикациях, например, (Акушский, И.Я., Юдицкий Д.И. Машинная арифметика в остаточных классах. Монография // М.: Советское радио, 1968. Макоха А.Н, Сахнюк П.А., Червяков Н.И. Дискретная математика. М: Физматлит, 2005. Глава 4 Алгебраические и теоретико-числовые основы модулярного кодирования)
В нашем случае применение имеет некоторые особенности. В частности, используют разные коэффициенты для координатных направлений признакового пространства, что позволяет повысить эффективность сжатия данных. Применение такого подхода для сжатия бортового каталога при навигационном определении координат звезд неизвестно.
Для оценки работоспособности и эффективности предлагаемого способа была выполнена экспериментальная проверка данного технического решения на основе данных одного из широко используемых базовых каталогов звезд Tycho-2.
В качестве примера реализации предлагаемого способа показаны полученные результаты формирования признакового пространства для прототипа и предложенного решения, что позволяет сделать сравнение сравнение с результатами, полученными с теми же данными в случае с прототипом.
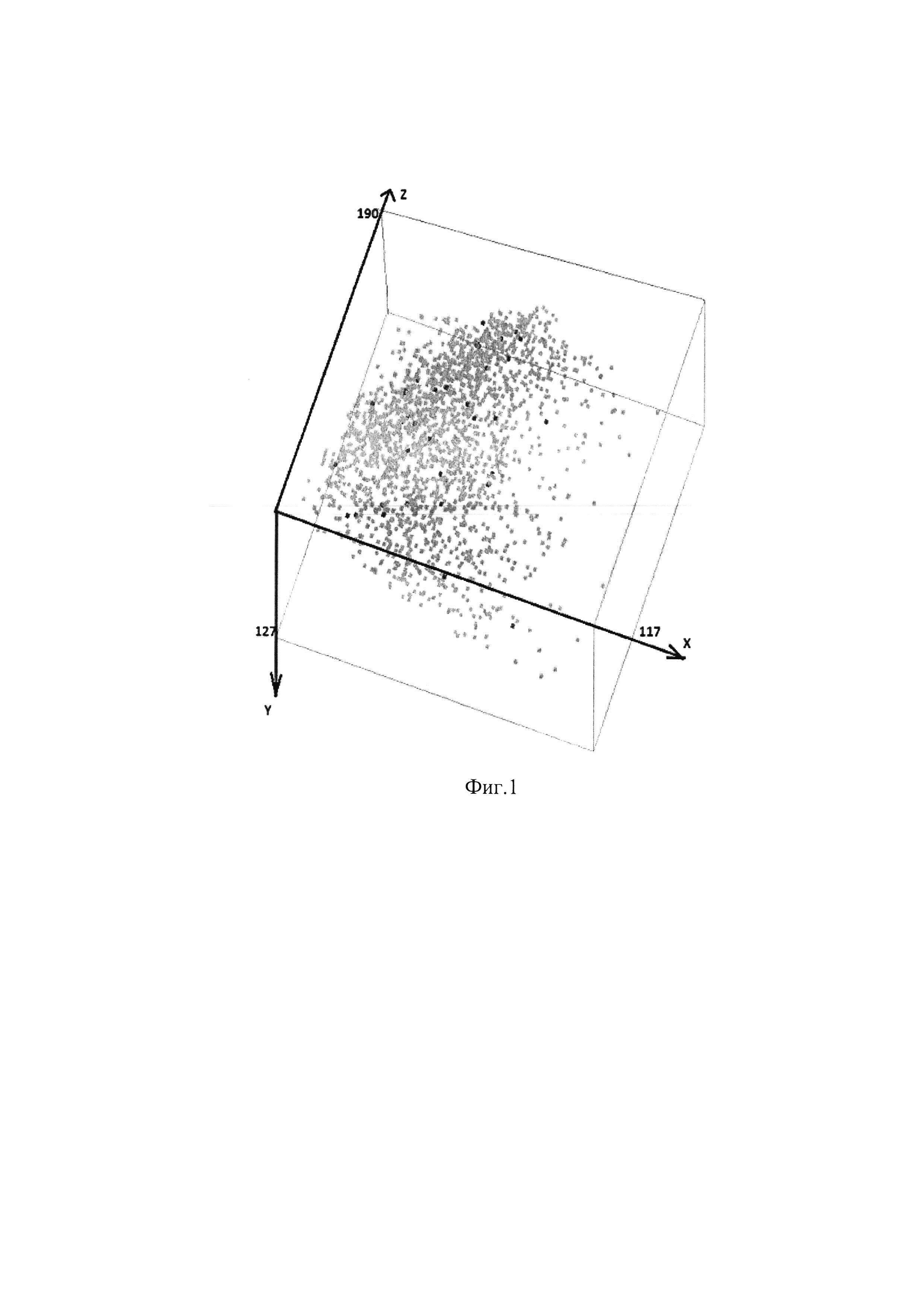
Из базового каталога Tycho-2 были выбраны 3349 звезд со звездной величиной до 5.6 для формирования бортового каталога моделируемого звездного датчика. Из звезд, выбранных для бортового каталога, было сформировано признаковое пространство межзвездных расстояний по методу прототипа. Для нашего случая, ограниченного заданным размером поля зрения звездного датчика, максимальные размеры расстояний по координатным осям признакового пространства, получились следующие: 117, 127, 190.
При таком количестве звезд в каталоге на каждую звезду потребуется 2 байта памяти, а полученный признаковый бортовой каталог для модели звездного датчика будет занимать 5646420 байтов памяти. Это достаточно большой объем. Анализ результатов показал, что в таком каталоге будет содержатся 110 дублей, 5 троек и 1 четверка повторения координат. То есть общее число этих повторений не значительно и может быть исключено из каталога.
Полученный результат распределения звезд в этом признаковом пространстве представлен на фиг. 1. На этом рисунке наблюдается пространственный характер размещения звезд в полученном признаковом пространстве. Темными точками выделены дубли.
Для примера реализации предложенного решения был использован тот же набор из 3349 звезд и та же модель звездного датчика, что и в случае с прототипом. Ранее полученное признаковое пространство было преобразовано делением координат признакового пространства на коэффициенты уменьшения, которые выбирали по каждому координатному направлению моделированием для массива звезд выбранных для каталога. В качестве координат преобразованного признакового пространства использовались остатки от деления на выбранный коэффициент уменьшения по каждой из координат.
На фиг. 2 показан результат преобразования признакового пространства, в координатах из остатков от деления. Соответствующие размеры признакового пространства по координатным осям после такого преобразования стали: 41, 47, 67. На представленном рисунке наблюдается увеличение плотности в размещении звезд в новом преобразованном признаковом пространстве. Выполненное преобразование для нашей модели позволило уменьшить необходимый объем памяти для хранения каталога до 258218 байтов. Число повторений при этом увеличилось незначительно, а именно 125 дублей, 6 троек и 1 четверка, эти звезды можно исключить из каталога. Таким образом, объем требуемой памяти для рассмотренного в примере каталога после предложенного преобразования уменьшился более, чем в 20 раз.
Проверка работоспособности предложенного технического решения производилась на нескольких случайно выбранных изображениях звездного неба и показала надежное отождествление.
Предлагаемый способ обеспечивает оперативное определение пространственных координат наблюдаемых звезд для определения ориентации с использованием бортового каталога по измерениям локальных характеристик - расстояний между соседними звездами в поле зрения звездного датчика. Выполнение операций способа позволяет непосредственно определять положение звезды в бортовом каталоге по результатам наблюдений, без перебора данных каталога. Выбор коэффициентов уменьшения при проектировании звездного датчика позволяет производить различную степень сжатия данных каталога с допустимым числом повторений и отбраковки звезд. Введенное для уменьшения размера признакового пространства преобразование не создает усложнения технологии определений, однако очень существенно уменьшает размер памяти необходимой для хранения данных бортового каталога, что дает значимый положительный эффект. Все операции предложенного способа легко реализуются в структуре блоков электроники современных звездных датчиков существующими средствами.
Реферат
Изобретение относится к способам определения ориентации по координатам наблюдаемых звезд, преимущественно для навигационных целей. В частности, для космической навигации, путем определения положения космического аппарата относительно изображений звезд, наблюдаемых прибором звездной ориентации. Сущность предлагаемого технического решения заключается в том, что при составлении бортового каталога размещения звезд в признаковом координатном пространстве попарных расстояний между звездами и при выполнении определений по изображениям звездного неба координаты звезд в признаковом пространстве представляют остатками от деления на коэффициенты, выбранные для уменьшения по каждому из координатных направлений, а из этих остатков от этого деления формируют адрес звезды в бортовом каталоге, по которому находят пространственные координаты звезд на небе. Предлагаемый способ обеспечивает оперативное нахождение пространственных координат наблюдаемых звезд для определения ориентации без перебора данных бортового каталога. Введенное преобразование признакового пространства позволяет существенно уменьшать его объем, а также необходимый размер требуемой памяти для его хранения. При этом число звезд в бортовом каталоге существенно не изменяется. Технический результат - повышение эффективности способа определения звездной ориентации за счет уменьшения размера признакового пространства для сокращения объема хранения бортового каталога и снижения затрат поиска. 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ определения ориентации по изображениям участков звездного неба
Комментарии