Бортовая система - RU2707967C1
Код документа: RU2707967C1
Чертежи









Описание
Уровень техники
1. Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к бортовой системе.
2. Описание предшествующего уровня техники
[0002] Предусмотрена система бортовой связи, которая включает в себя центр и бортовое устройство, оснащенное навигационным устройством и устройством связи, и которая выполняет обмен данными между центром и устройством связи бортового устройства посредством способа связи в форме либо связи с коммутацией пакетов, либо связи с коммутацией каналов. Позиционная информация, полученная посредством навигационного устройства, передается в центр через устройство связи (например, см. публикацию заявки на патент (Япония) номер 2005-217526 (JP 2005-217526 А)).
Сущность изобретения
[0003] В системе бортовой связи, раскрытой в JP 2005-217526 А, датум (datum) позиционной информации, полученной посредством навигационного устройства, не учитывается, когда эта позиционная информация передается в центр или другое бортовое устройство. Преобразование датума требуется, когда датум позиционной информации, полученной посредством навигационного устройства, и датум позиционной информации, используемой посредством центра или другого бортового устройства, отличаются друг от друга.
[0004] Следовательно, настоящее изобретение предоставляет бортовую систему, которая может преобразовывать датум.
[0005] Первый аспект изобретения предоставляет бортовую систему, включающую в себя: модуль приема позиционной информации, выполненный с возможностью принимать позиционную информацию из спутниковой системы позиционирования; первый модуль управления, который включает в себя модуль приема позиционной информации или соединяется с модулем приема позиционной информации; линию связи, соединенную с первым модулем управления; и второй модуль управления, который соединяется с первым модулем управления через линию связи и имеет первый модуль обработки преобразования, выполненный с возможностью преобразовывать датум позиционной информации. Первый модуль управления выполнен с возможностью передавать позиционную информацию, принимаемую посредством модуля приема позиционной информации, во второй модуль управления через линию связи, и второй модуль управления выполнен с возможностью преобразовывать датум позиционной информации, принимаемой из первого модуля управления, посредством первого модуля обработки преобразования.
[0006] Согласно первому аспекту, датум позиционной информации, принимаемой посредством модуля приема позиционной информации, может преобразовываться посредством первого модуля обработки преобразования.
[0007] Следовательно, может предоставляться бортовая система, которая может преобразовывать датум.
[0008] В первом аспекте, бортовая система может включать в себя модуль связи, выполненный с возможностью выполнять беспроводной обмен данными с сервером, включающим в себя второй модуль обработки преобразования, выполненный с возможностью преобразовывать датум позиционной информации из спутниковой системы позиционирования. Первый модуль управления может включать в себя модуль связи или соединяться с модулем связи и может быть выполнен с возможностью передавать позиционную информацию, принимаемую посредством модуля приема позиционной информации, на сервер через модуль связи.
[0009] Согласно вышеуказанной конфигурации, позиционная информация с непреобразованным датумом может передаваться на сервер.
[0010] Следовательно, может предоставляться бортовая система, которая может преобразовывать датум позиционной информации, которая должна использоваться посредством второго модуля управления, а также передавать позиционную информацию с непреобразованным датумом на сервер.
[0011] В первом аспекте, бортовая система может включать в себя модуль связи, который выполняет беспроводной обмен данными с сервером. Первый модуль управления может включать в себя модуль связи или соединяться с модулем связи и может быть выполнен с возможностью передавать позиционную информацию, принимаемую посредством модуля приема позиционной информации, во второй модуль управления через линию связи. Второй модуль управления может быть выполнен с возможностью преобразовывать датум позиционной информации, принимаемой из первого модуля управления, посредством первого модуля обработки преобразования и передавать позиционную информацию с преобразованным датумом в первый модуль управления через линию связи. Первый модуль управления может быть выполнен с возможностью передавать позиционную информацию с преобразованным датумом, принимаемую из второго модуля управления, на сервер через модуль связи.
[0012] Согласно вышеуказанной конфигурации, позиционная информация с датумом, преобразованным посредством второго модуля управления, может передаваться на сервер.
[0013] Следовательно, может предоставляться бортовая система, которая может преобразовывать датумы позиционной информации, которая должна использоваться посредством второго модуля управления, и позиционной информации, которая должна передаваться на сервер.
[0014] Второй аспект изобретения предоставляет бортовую систему, включающую в себя: модуль приема позиционной информации, выполненный с возможностью принимать позиционную информацию из спутниковой системы позиционирования; первый модуль управления, который включает в себя модуль приема позиционной информации или соединяется с модулем приема позиционной информации; линию связи, соединенную с первым модулем управления; и второй модуль управления, соединенный с первым модулем управления через линию связи. Первый модуль управления может иметь первый модуль обработки преобразования, выполненный с возможностью преобразовывать датум позиционной информации, первый модуль управления может быть выполнен с возможностью преобразовывать датум позиционной информации, принимаемой посредством модуля приема позиционной информации, посредством первого модуля обработки преобразования и передавать позиционную информацию с преобразованным датумом во второй модуль управления через линию связи.
[0015] Согласно вышеуказанной конфигурации, датум позиционной информации, принимаемой посредством модуля приема позиционной информации, может преобразовываться посредством первого модуля обработки преобразования.
[0016] Следовательно, может предоставляться бортовая система, которая может преобразовывать датум.
[0017] Во втором аспекте, бортовая система может включать в себя модуль связи, выполненный с возможностью выполнять беспроводной обмен данными с сервером. Первый модуль управления может включать в себя модуль связи или соединяться с модулем связи, и первый модуль управления может быть выполнен с возможностью преобразовывать датум позиционной информации, принимаемой посредством модуля приема позиционной информации, посредством первого модуля обработки преобразования и передавать позиционную информацию с преобразованным датумом на сервер через модуль связи.
[0018] Согласно второму аспекту, позиционная информация, принимаемая посредством модуля приема позиционной информации, может передаваться во второй модуль управления и на сервер после того, как датум позиционной информации преобразуется посредством первого модуля обработки преобразования.
[0019] Следовательно, может предоставляться бортовая система, которая может преобразовывать датум позиционной информации, которая должна использоваться посредством второго модуля управления и сервера.
[0020] Во втором аспекте, бортовая система может включать в себя модуль связи, выполненный с возможностью выполнять беспроводной обмен данными с сервером, включающим в себя второй модуль обработки преобразования, выполненный с возможностью преобразовывать датум позиционной информации из спутниковой системы позиционирования. Первый модуль управления может включать в себя модуль связи или соединяться с модулем связи и может быть выполнен с возможностью передавать позиционную информацию, принимаемую посредством модуля приема позиционной информации, на сервер через модуль связи.
[0021] Согласно вышеуказанной конфигурации, датум позиционной информации, принимаемой посредством модуля приема позиционной информации, может преобразовываться посредством первого модуля обработки преобразования, и позиционная информация с непреобразованным датумом может передаваться на сервер.
[0022] Следовательно, может предоставляться бортовая система, которая может преобразовывать датум.
[0023] В первом и втором аспекте, датум позиционной информации, принимаемой посредством модуля приема позиционной информации, может представлять собой глобальный датум, и датум, в который преобразуется датум позиционной информации посредством первого модуля обработки преобразования, может представлять собой датум области, в которой расположено транспортное средство, оснащенное бортовой системой.
[0024] Согласно вышеуказанной конфигурации, позиционная информация на основе глобального датума, принимаемая посредством модуля приема позиционной информации, может преобразовываться в позиционную информацию на основе регионального датума посредством первого модуля обработки преобразования.
[0025] Следовательно, может предоставляться бортовая система, которая может преобразовывать позиционную информацию на основе глобального датума в позиционную информацию на основе регионального датума.
[0026] Третий аспект изобретения предоставляет бортовую систему, включающую в себя: модуль приема позиционной информации, выполненный с возможностью принимать позиционную информацию из спутниковой системы позиционирования; первый модуль управления, выполненный с возможностью использовать, в качестве первого датума, только позиционную информацию, полученную из модуля приема позиционной информации; и второй модуль управления, выполненный с возможностью принимать из первого модуля управления позиционную информацию, полученную из модуля приема позиционной информации, и использовать позиционную информацию в качестве второго датума.
[0027] Согласно третьему аспекту, датум позиционной информации, принимаемой посредством модуля приема позиционной информации, может преобразовываться посредством первого модуля обработки преобразования.
[0028] Следовательно, может предоставляться бортовая система, которая может преобразовывать датум.
[0029] В первом-третьем аспекте, бортовая система может не включать в себя модуль приема позиционной информации, выполненный с возможностью принимать позиционную информацию из спутниковой системы позиционирования, отличный от модуля приема позиционной информации.
[0030] Согласно вышеуказанной конфигурации, может упрощаться конфигурация.
[0031] Следовательно, может предоставляться бортовая система, которая может преобразовывать датум при наличии простой конфигурации.
Краткое описание чертежей
[0032] Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является видом, показывающим аппаратную конфигурацию системы 10 передачи данных варианта осуществления;
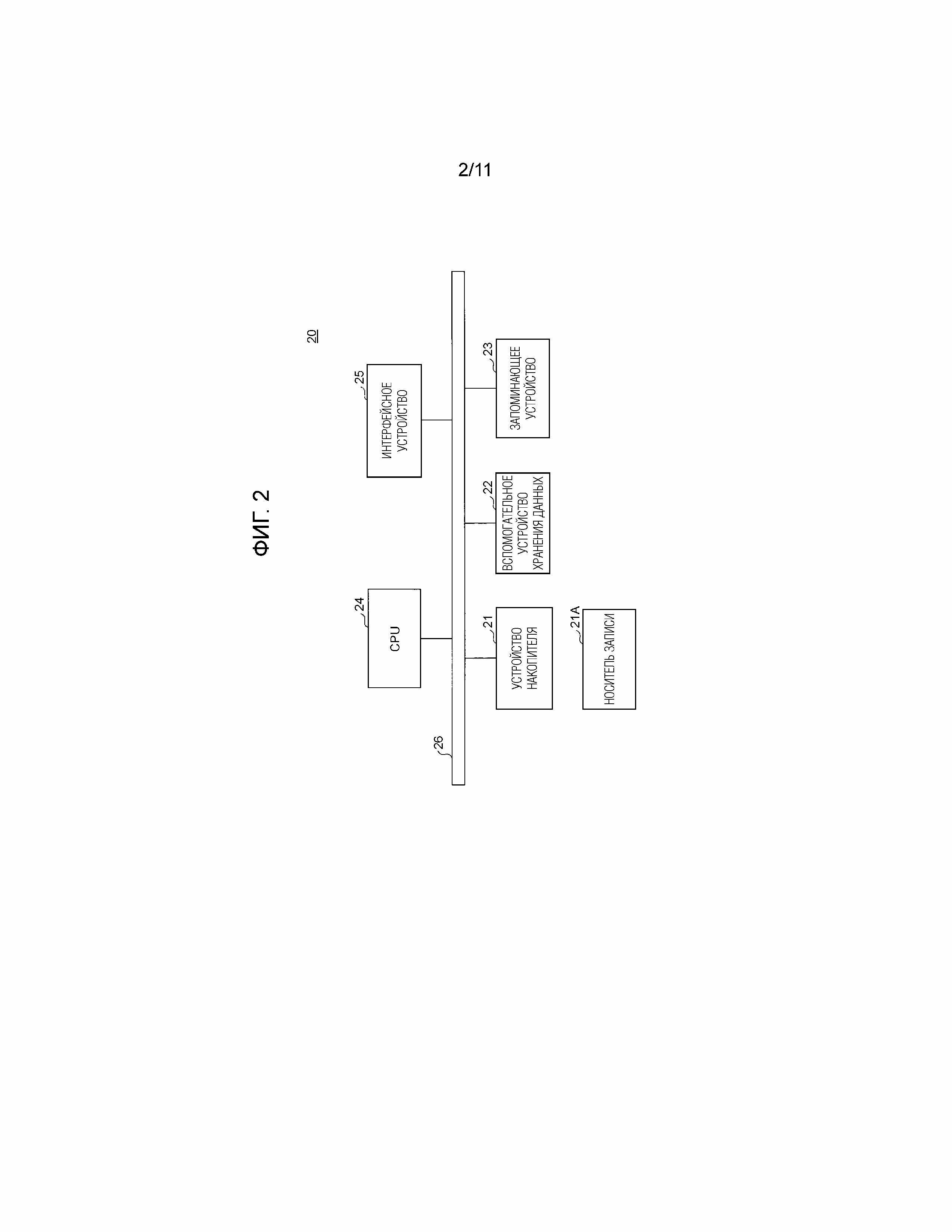
Фиг. 2 является видом, показывающим аппаратную конфигурацию компьютера, который реализует центр 20 варианта осуществления;
Фиг. 3 является видом, показывающим внутренние конфигурации центра 20 и бортовой системы 100 системы 10 передачи данных;
Фиг. 4 является блок-схемой последовательности операций способа, показывающей процесс, выполняемый посредством ECU 112 связи DCM 110;
Фиг. 5 является блок-схемой последовательности операций способа, показывающей процесс, выполняемый посредством навигационного ECU 120;
Фиг. 6 является видом, показывающим внутренние конфигурации центра 20 и бортовой системы 100M1 системы 10M1 передачи данных согласно модифицированному примеру варианта осуществления;
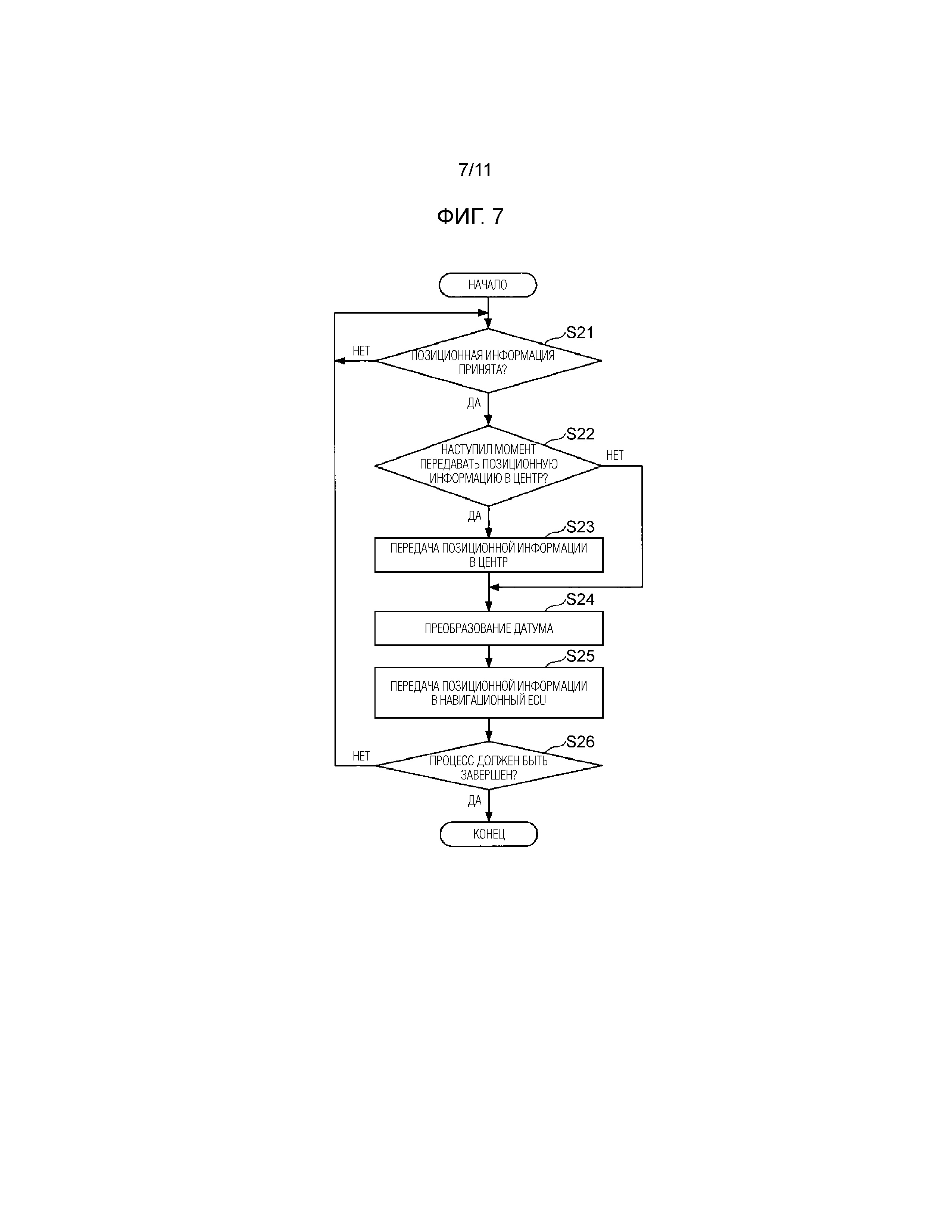
Фиг. 7 является блок-схемой последовательности операций способа, показывающей процесс, выполняемый посредством ECU 112M1 связи DCM 110M1;
Фиг. 8 является видом, показывающим внутренние конфигурации центра 20 и бортовой системы 100M2 системы 10M2 передачи данных согласно модифицированному примеру варианта осуществления;
Фиг. 9 является блок-схемой последовательности операций способа, показывающей процесс, выполняемый посредством навигационного ECU 120M2;
Фиг. 10 является видом, показывающим внутренние конфигурации центра 20 и бортовой системы 100M3 системы 10M3 передачи данных согласно модифицированному примеру варианта осуществления; и
Фиг. 11 является блок-схемой последовательности операций способа, показывающей процесс, выполняемый посредством ECU 150 получения позиционной информации.
Подробное описание вариантов осуществления
[0033] Ниже описывается вариант осуществления, в котором применяются бортовая система, система передачи данных, способ управления бортовой системой и способ программного управления настоящего изобретения.
Вариант осуществления
[0034] Фиг. 1 является видом, показывающим аппаратную конфигурацию системы 10 передачи данных варианта осуществления. Система 10 передачи данных включает в себя центр 20 и бортовую систему 100, которая устанавливается в транспортном средстве 50. Центр 20 и бортовая система 100 могут обмениваться данными между собой через сеть 11 связи, включающую в себя сеть беспроводной связи, такую как сеть мобильной связи или Интернет-сеть, состоящая из большого числа базовых станций. Фиг. 1 показывает одну бортовую систему 100, но фактически множество бортовых систем 100, установленных во множестве транспортных средств 50, выполнены с возможностью обмениваться данными с центром 20 через сеть 11 связи.
[0035] Центр 20 представляет собой агрегированный объект из одного или более компьютеров (устройств обработки информации). Центр 20 также может рассматриваться в качестве сервера или центрального сервера, включающего в себя один или более компьютеров (устройств обработки информации).
[0036] Центр 20 принимает позиционную информацию и другую информацию из бортовой системы 100 транспортного средства 50 и предоставляет различные услуги и т.д. с использованием принимаемой позиционной информации. Примеры таких различных услуг включают в себя услугу экстренных сообщений и услугу уведомления и отслеживания краж. Услуга экстренных сообщений представляет собой услугу, в которой когда активируется подушка безопасности транспортного средства 50, и центр 20 принимает позиционную информацию, информацию, указывающую активацию подушки безопасности, и т.д. из бортовой системы 100, центр 20 обеспечивает телефонную линию с бортовой системой 100, и оператор в центре 20 беседует с пассажиром транспортного средства 50. Услуга уведомления и отслеживания краж представляет собой услугу, в которой когда активируется система тревожной сигнализации транспортного средства 50, и центр 20 принимает позиционную информацию, информацию, указывающую активацию системы тревожной сигнализации, и т.д. из бортовой системы 100, центр 20 обменивается данными с бортовой системой 100 и отслеживает позицию транспортного средства 50.
[0037] Например, транспортное средство 50 представляет собой электротранспортное средство (EV), гибридное транспортное средство со штепсельным соединением для заряда от внешнего источника (PHV), гибридное транспортное средство (HV), транспортное средство с бензиновым двигателем или транспортное средство с дизельным двигателем. Бортовая система 100, установленная в транспортном средстве 50, имеет такие функции, как обмен данными с центром 20 и прием позиционной информации, указывающей текущую позицию транспортного средства 50, полученную посредством глобальной системы позиционирования (GPS), которая представляет собой пример спутниковой системы позиционирования. Ниже описывается конкретная конфигурация бортовой системы 100.
[0038] Фиг. 2 является видом, показывающим аппаратную конфигурацию компьютера, который реализует центр 20 варианта осуществления. Центр 20 имеет устройство 21 накопителя, вспомогательное устройство 22 хранения данных, запоминающее устройство 23, центральный процессор 24 (CPU), интерфейсное устройство 25 и т.д. Эти устройства соединяются друг с другом через шину 26.
[0039] Из этих устройств, устройство 21 накопителя реализовано посредством устройства считывания носителя 21A записи, который представляет собой CD-ROM, карту памяти в формате SD и т.п. Вспомогательное устройство 22 хранения данных реализовано посредством жесткого диска (HDD). Запоминающее устройство 23 реализовано посредством оперативного запоминающего устройства (RAM) и постоянного запоминающего устройства (ROM). Интерфейсное устройство 25 реализовано посредством интерфейса ввода-вывода или интерфейса связи.
[0040] Программа, которая реализует процессы в центре 20, предоставляется посредством носителя 21A записи, который представляет собой CD-ROM, карту памяти в формате SD и т.п. Когда носитель 21A записи, сохраняющий программу задается в устройстве 21 накопителя, программа устанавливается из носителя 21A записи на вспомогательное устройство 22 хранения данных через устройство 21 накопителя. Тем не менее, совершенно необязательно устанавливать программу с носителя 21A записи, и программа вместо этого может загружаться с другого компьютера через сеть. Вспомогательное устройство 22 хранения данных сохраняет установленную программу, а также требуемые файлы, данные и т.д.
[0041] После приема команды для того, чтобы запускать программу, запоминающее устройство 23 считывает программу из вспомогательного устройства 22 хранения данных и сохраняет программу. CPU 24 выполняет функции, связанные с центром 20, в соответствии с программой, сохраненной в запоминающем устройстве 23. Интерфейсное устройство 25 используется в качестве интерфейса, посредством которого центр 20 соединяется с сетью.
[0042] Фиг. 3 является видом, показывающим внутренние конфигурации центра 20 и бортовой системы 100 системы 10 передачи данных.
[0043] Центр 20 включает в себя главный модуль 20A управления, модуль 20B получения позиционной информации, модуль 2°C обработки преобразования и запоминающее устройство 20D. Главный модуль 20A управления, модуль 20B получения позиционной информации и модуль 2°C обработки преобразования представляются как функциональные блоки, показывающие функции программы, выполняемой посредством центра 20. Запоминающее устройство 20D представляет функции вспомогательного устройства 22 хранения данных и запоминающего устройства 23 (см. фиг. 2).
[0044] Главный модуль 20A управления представляет собой модуль управления, который выполняет процессы услуги экстренных сообщений, услуги уведомления и отслеживания краж и т.д. и различные другие процессы, которые должны выполняться в центре 20. Модуль 20B получения позиционной информации получает позиционную информацию относительно транспортного средства 50 из бортовой системы 100 транспортного средства 50. Модуль 2°C обработки преобразования выполняет процесс преобразования датума позиционной информации относительно транспортного средства 50, полученной посредством модуля 20B получения позиционной информации, из глобального датума в локальный датум, который используется посредством центра 20. Модуль 2°C обработки преобразования представляет собой пример второго модуля обработки преобразования. Запоминающее устройство 20D сохраняет программу и данные, требуемые для центра 20, чтобы выполнять различные процессы, и данные, включающие в себя позиционную информацию, получающуюся в результате таких процессов.
[0045] Глобальный датум представляет собой датум, область применения которого может охватывать весь земной шар. Локальный датум представляет собой датум, область применения которого не охватывает весь земной шар, а может охватывать только некоторые страны, регионы, и т.д. включенные в земной шар (региональный датум).
[0046] Бортовая система 100 имеет модуль 110 обмена данными (DCM), навигационный электронный модуль 120 управления (ECU), ECU 130 и CAN 140. DCM 110, навигационный ECU 120 и ECU 130 соединяются друг с другом через CAN 140. ECU 130 совместно представляет другие ECU, отличные от DCM 110 и навигационного ECU 120, установленных в транспортном средстве 50.
[0047] DCM 110 имеет модуль 111 связи, ECU 112 связи, приемный GPS-модуль 113 и запоминающее устройство 114.
[0048] Модуль 111 связи представляет собой пример модуля связи или устройства беспроводной связи, установленного в транспортном средстве 50, и выполняет беспроводной обмен данными с центром 20 через сеть 11 связи.
[0049] ECU 112 связи имеет модуль 112A управления. ECU 112 связи реализован посредством компьютера, включающего в себя CPU, RAM, ROM, HDD, интерфейс ввода-вывода, интерфейс связи, внутреннюю шину и т.д. Модуль 112A управления ECU 112 связи представляет собой пример первого модуля управления.
[0050] ECU 112 связи соединяется с навигационным ECU 120 через CAN 140. Датчик 51 подушки безопасности и датчик 52 автосигнализации соединяются с ECU 112 связи.
[0051] Датчик 51 подушки безопасности обнаруживает то, что подушка безопасности транспортного средства 50 раскрыта, и выводит сигнал, указывающий раскрытие, в ECU 112 связи. Когда защитное устройство транспортного средства 50 выдает аварийный сигнал, датчик 52 автосигнализации выводит сигнал, указывающий выдачу аварийного сигнала, в ECU 112 связи.
[0052] Модуль 112A управления представляется как функциональный блок, показывающий функцию программы, выполняемой посредством ECU 112 связи. Модуль 112A управления управляет началом, завершением и т.д. связи модуля 111 связи, вводом и выводом данных, передаваемых или принимаемых в беспроводной передаче данных, и т.д.
[0053] Модуль 112A управления выводит позиционную информацию, введенную из приемного GPS-модуля 113, в навигационное ECU 120, а также передает позиционную информацию в центр 20.
[0054] Таким образом, когда датчик 51 подушки безопасности обнаруживает то, что подушка безопасности раскрыта, или когда датчик 52 автосигнализации обнаруживает то, что аварийный сигнал выдан, модуль 112A управления выводит позиционную информацию, введенную из приемного GPS-модуля 113, наряду с информацией, указывающей раскрытие подушки безопасности или выдачу аварийного сигнала, в центр 20. Как результат, центр 20 начинает услугу экстренных сообщений или услугу уведомления и отслеживания краж.
[0055] Могут возникать случаи, отличные от этих случаев, в которых модуль 112A управления передает позиционную информацию в центр 20. Также в таких случаях, позиционная информация передается в центр 20 без преобразования датума. В некоторых случаях, модуль 112A управления передает информацию, отличную от позиционной информации, в центр 20. Например, когда транспортное средство 50 представляет собой EV, PHV, HV и т.п., модуль 112A управления может передавать скорость заряда аккумулятора, который накапливает электрическую мощность для движения транспортного средства 50, и т.д.
[0056] Приемный GPS-модуль 113 принимает позиционную информацию и информацию времени из GPS. Датум позиционной информации, выводимой посредством приемного GPS-модуля 113, представляет собой глобальный датум. Приемный GPS-модуль 113 представляет собой пример модуля приема позиционной информации. Позиционная информация из GPS, принимаемая посредством приемного GPS-модуля 113, указывает текущую позицию транспортного средства 50 посредством широты и долготы. Информация времени представляет собой данные, указывающие текущее время. Приемный GPS-модуль 113 выводит позиционную информацию и информацию времени в ECU 112 связи.
[0057] Приемный GPS-модуль 113 представляет собой единственный приемный GPS-модуль, который включен в бортовую систему 100. Другими словами, бортовая система 100 включает в себя только один приемный GPS-модуль. Как упомянуто выше, датум позиционной информации, принимаемой посредством приемного GPS-модуля 113, представляет собой глобальный датум.
[0058] Запоминающее устройство 114 временно хранит данные, передаваемые или принимаемые посредством ECU 112 связи через модуль 111 связи, позиционную информацию, принимаемую посредством приемного GPS-модуля 113, и т.д. и сохраняет программу и т.д., требуемую для DCM 110 с тем, чтобы выполнять процесс связи.
[0059] Навигационный ECU 120 включает в себя главный модуль 121 управления, модуль 122 получения позиционной информации, модуль 123 обработки преобразования, модуль 124 поиска маршрута и запоминающее устройство 125. Навигационный ECU 120 реализован посредством компьютера, включающего в себя CPU, RAM, ROM, HDD, интерфейс ввода-вывода, интерфейс связи, внутреннюю шину и т.д. Навигационный ECU 120 представляет собой пример второго модуля управления.
[0060] Главный модуль 121 управления, модуль 122 получения позиционной информации, модуль 123 обработки преобразования и модуль 124 поиска маршрута представляются как функциональные блоки, показывающие функции программы, выполняемой посредством навигационного ECU 120. Запоминающее устройство 125 представляет функции частей, которые сохраняют данные, таких как RAM, ROM и HDD, включенных в навигационный ECU 120.
[0061] Главный модуль 121 управления представляет собой модуль обработки, который выполняет процессы, отличные от процессов, выполняемых посредством модуля 122 получения позиционной информации, модуля 123 обработки преобразования и модуля 124 поиска маршрута, и который осуществляет общее управление процессами в навигационном ECU 120.
[0062] Модуль 122 получения позиционной информации получает, через CAN 140, позиционную информацию, принимаемую посредством приемного GPS-модуля 113 DCM 110. Модуль 122 получения позиционной информации также получает, через CAN 140, информацию времени, принимаемую посредством приемного GPS-модуля 113 DCM 110 наряду с позиционной информацией. Поскольку навигационный ECU 120 не включает в себя приемный GPS-модуль, навигационный ECU 120 получает позиционную информацию и информацию времени из DCM 110.
[0063] Модуль 123 обработки преобразования преобразует датум позиционной информации, полученной посредством модуля 122 получения позиционной информации из DCM 110, из глобального датума в локальный датум, а затем выводит эту позиционную информацию в главный модуль 121 управления и модуль 124 поиска маршрута. Как результат, главный модуль 121 управления показывает позиционную информацию с датумом, преобразованным посредством модуля 123 обработки преобразования, в качестве текущей позиции на картографическом изображении, показанном на дисплее навигационного устройства. Модуль 124 поиска маршрута выполняет поиск маршрута с использованием позиционной информации с датумом, преобразованным посредством модуля 123 обработки преобразования, в качестве текущей позиции. Модуль 123 обработки преобразования представляет собой пример первого модуля обработки преобразования.
[0064] Модуль 124 поиска маршрута принимает информацию, включающую в себя пункт назначения, введенный в навигационную систему пользователем транспортного средства 50, и выполняет процесс поиска маршрута на основе информации, включающей в себя пункт назначения и позиционную информацию, указывающую текущую позицию транспортного средства 50. Маршрут (от текущего местоположения до пункта назначения) получающийся в результате поиска, показан на дисплее навигационного устройства.
[0065] Хотя в варианте осуществления, описанном здесь, навигационный ECU 120 выполняет поиск маршрута, центр 20 вместо этого может выполнять поиск маршрута. В этом случае, модуль 124 поиска маршрута может передавать информацию, включающую в себя пункт назначения и позиционную информацию, указывающую текущую позицию транспортного средства 50, в центр 20 через DCM 110, и центр 20 может выполнять поиск маршрута и передавать данные, указывающие маршрут, получающийся в результате поиска, в бортовую систему 100. DCM 110 бортовой системы 100 может принимать данные, указывающие маршрут, из центра 20 и передавать эти данные в навигационный ECU 120 через CAN 140.
[0066] В этом случае, DCM 110 может передавать позиционную информацию, указывающую текущую позицию с непреобразованным датумом, в центр 20, и центр 20 может выполнять поиск маршрута посредством преобразования датума принимаемой позиционной информации в локальный датум.
[0067] Запоминающее устройство 125 сохраняет картографические данные и программы, данные, и т.д. требуемые для управления, выполняемого в качестве навигационного ECU 120. Запоминающее устройство 125 представляет собой пример модуля хранения.
[0068] Фиг. 4 является блок-схемой последовательности операций способа, показывающей процесс, выполняемый посредством ECU 112 связи DCM 110. Более конкретно, процесс, показанный на фиг. 4, представляет собой процесс, выполняемый посредством модуля 112A управления ECU 112 связи.
[0069] ECU 112 связи начинает процесс, когда зажигание или мощность транспортного средства 50 включается.
[0070] ECU 112 связи определяет то, принята или нет позиционная информация из приемного GPS-модуля 113 (этап S1). ECU 112 связи многократно выполняет процесс на этапе S1 до определения того, что позиционная информация принята.
[0071] Когда ECU 112 связи определяет то, что позиционная информация принята (S1: "Да"), ECU 112 связи определяет то, наступил или нет момент передавать позиционную информацию в центр 20 (этап S2). Это обусловлено тем, что позиционная информация передается в центр 20 один раз в предварительно определенное время. Например, предварительно определенное время составляет 30 секунд.
[0072] Когда ECU 112 связи определяет то, что наступил момент передавать позиционную информацию в центр 20 (S2: "Да"), ECU 112 связи передает позиционную информацию в центр 20 (этап S3). В качестве результата процесса на этапе S3, позиционная информация на основе глобального датума передается в центр 20. После выполнения процесса на этапе S3, ECU 112 связи переходит к этапу S4.
[0073] С другой стороны, когда ECU 112 связи на этапе S2 определяет то, что не наступил момент передавать позиционную информацию в центр 20 (S2: "Нет"), ECU 112 связи передает позиционную информацию в навигационный ECU 120 (этап S4).
[0074] Когда процесс на этапе S4 выполняется через этап S3, ECU 112 связи хранит позиционную информацию, принимаемую на этапе S1, в запоминающем устройстве 114 и передает позиционную информацию в центр 20 на этапе S3 и затем передает идентичную позиционную информацию в навигационный ECU 120 на этапе S4.
[0075] ECU 112 связи определяет то, следует или нет завершать процесс (этап S5). Процесс завершается, когда зажигание или мощность выключается.
[0076] Когда ECU 112 связи определяет не завершать процесс (S5: "Нет"), ECU 112 связи возвращается к этапу S1. Таким образом, ECU 112 связи многократно выполняет последовательность процессов от этапа S1.
[0077] Когда ECU 112 связи определяет завершать процесс (S5: "Да"), ECU 112 связи завершает процесс ("конец"). Таким образом, последовательности процессов завершаются.
[0078] Альтернативно, ECU 112 связи может определять то, включена или нет мощность навигационного устройства, перед передачей позиционной информации в навигационный ECU 120 на этапе S4, и может передавать позиционную информацию в навигационный ECU 120, когда мощность навигационного устройства включена.
[0079] Фиг. 5 является блок-схемой последовательности операций способа, показывающей процесс, выполняемый посредством навигационного ECU 120.
[0080] Навигационный ECU 120 начинает процесс, когда мощность навигационного устройства включается.
[0081] Навигационный ECU 120 определяет то, принята или нет позиционная информация из DCM 110 (этап S11). Навигационный ECU 120 многократно выполняет процесс на этапе S11 до определения того, что позиционная информация принята. Процесс на этапе S11 выполняется посредством модуля 122 получения позиционной информации.
[0082] Когда навигационный ECU 120 определяет то, что позиционная информация принята из DCM 110 (S11: "Да"), навигационный ECU 120 преобразует датум принимаемой позиционной информации из глобального датума в локальный датум (этап S12). Процесс на этапе S12 выполняется посредством модуля 123 обработки преобразования.
[0083] Навигационный ECU 120 выполняет процесс с использованием преобразованной позиционной информации (этап S13). Процесс, выполняемый на этапе S13, представляет собой процесс управления, выполняемый в качестве навигационного устройства. Примеры этого процесса включают в себя процесс показа текущей позиции на дисплее навигационного устройства, процессе поиска маршрута с использованием текущей позиции и процесс предоставления навигации на основе инструкций по маршруту для маршрута, получающегося в результате поиска.
[0084] Навигационный ECU 120 определяет то, следует или нет завершать процесс (этап S14). Процесс завершается, когда мощность навигационного устройства выключается.
[0085] Когда навигационный ECU 120 определяет завершать процесс (S14: "Да"), навигационный ECU 120 завершает процесс ("конец"). Таким образом, последовательности процессов завершаются. Когда навигационный ECU 120 определяет не завершать процесс (S14: "Нет"), навигационный ECU 120 возвращается к этапу S11 ("конец").
[0086] Как описано выше, навигационный ECU 120 бортовой системы 100 варианта осуществления имеет модуль 123 обработки преобразования, таким образом датум позиционной информации, принимаемой посредством приемного GPS-модуля 113 из GPS-спутника, может преобразовываться в бортовой системе 100. Поскольку датум позиционной информации, принимаемой из GPS-спутника, представляет собой глобальный датум, эта позиционная информация преобразуется в позиционную информацию на основе локального датума посредством модуля 123 обработки преобразования.
[0087] Поскольку модуль 123 обработки преобразования преобразует позиционную информацию на основе глобального датума, принимаемую посредством DCM 110 из GPS-спутника, в позиционную информацию на основе локального датума, которая используется посредством навигационного ECU 120, навигационный ECU 120 может выполнять поиск маршрута посредством преобразования датума позиционной информации, принимаемой из DCM 110 через CAN 140.
[0088] Таким образом, бортовая система 100 имеет конфигурацию, которая не включает в себя приемный GPS-модуль, отличный от приемного GPS-модуля 113, включенного в DCM 110, и при этом навигационный ECU 120, может выполнять поиск маршрута посредством использования позиционной информации на основе локального датума страны, региона и т.д., в котором расположено транспортное средство 50.
[0089] По сравнению с конфигурацией, в которой бортовая система 100 включает в себя приемный GPS-модуль, отличный от приемного GPS-модуля 113, и навигационный ECU 120 включает в себя этот другой приемный GPS-модуль или соединяется с этим другим приемным GPS-модулем, конфигурация бортовой системы 100 варианта осуществления, который включает в себя только один приемный GPS-модуль 113, может реализовывать простую конфигурацию. В силу наличия GPS-антенны и т.д., приемный GPS-модуль 113 требует некоторого пространства для установки. Таким образом, бортовая система 100 варианта осуществления позволяет достигать уменьшения размера. Кроме того, бортовая система 100 варианта осуществления позволяет достигать снижения затрат посредством реализации простой конфигурации.
[0090] В частности, бортовая система 100 варианта осуществления может преобразовывать датум позиционной информации при наличии конфигурации, которая включает в себя только один приемный GPS-модуль 113. При такой конфигурации, бортовая система 100 реализует упрощение конфигурации, уменьшение размера и снижение затрат.
[0091] Единственный модуль обработки преобразования, который включен в бортовую систему 100 варианта осуществления, представляет собой модуль 123 обработки преобразования навигационного ECU 120. Это также способствует упрощению доли и снижению затрат бортовой системы 100 варианта осуществления.
[0092] В варианте осуществления, описанном выше, DCM 110 включает в себя приемный GPS-модуль 113. Тем не менее, приемный GPS-модуль 113 вместо этого может предоставляться за пределами DCM 110, и приемный GPS-модуль 113 может соединяться с DCM 110.
[0093] В варианте осуществления, описанном выше, DCM 110 передает позиционную информацию с непреобразованным датумом в центр 20, и модуль 2°C обработки преобразования центра 20 преобразует датум принимаемой позиционной информации. Тем не менее, когда локальный датум, используемый посредством навигационного ECU 120, и локальный датум, в который преобразуется датум позиционной информации в центре 20, являются идентичными, навигационный ECU 120 может передавать позиционную информацию с датумом, преобразованным в локальный датум, в DCM 110, и DCM 110 может передавать эту позиционную информацию на основе локального датума в центр 20. В этом случае, центр 20 не должен обязательно включать в себя модуль 2°C обработки преобразования.
[0094] В варианте осуществления, описанном выше, DCM 110, включающий в себя модуль 111 связи, включает в себя приемный GPS-модуль 113. Тем не менее, бортовая система 100 может не включать в себя DCM 110, и один ECU из ECU 130 может включать в себя приемный GPS-модуль 113 или соединяется с приемным GPS-модулем 113. В этом случае, бортовая система 100 не осуществляет связь с центром 20 и другими внешними устройствами через сеть 11 связи, и позиционная информация передается из этого ECU 130, имеющего приемный GPS-модуль 113, в навигационный ECU 120.
[0095] В варианте осуществления, описанном выше, DCM 110 и навигационный ECU 120 соединяются между собой через CAN 140. Тем не менее, DCM 110 и навигационный ECU 120 вместо этого могут соединяться между собой через шину и т.д., отличную от CAN 140, такую как универсальная последовательная шина (USB). Когда DCM 110 и навигационный ECU 120 используют протокол связи Ethernet (R), DCM 110 и навигационный ECU 120 могут соединяться между собой через кабель связи Ethernet.
[0096] В варианте осуществления, описанном выше, бортовая система 100 включает в себя навигационный ECU 120. Тем не менее, бортовая система 100 может включать в себя ECU, который использует позиционную информацию вместо навигационного ECU 120. Примеры ECU, который использует позиционную информацию, включают в себя ECU, который управляет автоматическим вождением (ECU автоматического вождения).
[0097] Это применяется к случаю, в котором транспортное средство 50 представляет собой транспортное средство с функцией автоматического вождения. В этом случае, ECU, который использует позиционную информацию, может иметь модуль обработки преобразования, и датум позиционной информации, передаваемой из DCM 110 через CAN 140, может преобразовываться посредством модуля обработки преобразования в датум, используемый посредством ECU автоматического вождения (например, в локальный датум). Автоматическое вождение представляет собой автоматическое вождение предварительно определенного уровня, указываемое посредством Министерства земель, инфраструктуры, транспорта и туризма, Ассоциации инженеров автомобилестроения (SAE) и т.д.
[0098] Когда бортовая система 100 включает в себя ECU автоматического вождения в дополнение к навигационному ECU 120 или вместо навигационного ECU 120, ECU автоматического вождения может не иметь приемного GPS-модуля и может получать позиционную информацию из DCM 110. Это обусловлено тем, что бортовая система 100 не включает в себя приемный GPS-модуль, отличный от приемного GPS-модуля 113.
[0099] Альтернативно, в этом случае, DCM 110 может не включать в себя приемный GPS-модуль 113, и ECU автоматического вождения может включать в себя приемный GPS-модуль и DCM 110, и навигационный ECU 120 может получать позиционную информацию из ECU автоматического вождения.
[0100] Когда бортовая система 100 включает в себя ECU связи между транспортными средствами, который выполняет обмен данными между транспортными средствами, в дополнение к навигационному ECU 120 или вместо навигационного ECU 120, ECU связи между транспортными средствами может не иметь приемного GPS-модуля и может получать позиционную информацию из DCM 110. Это обусловлено тем, что бортовая система 100 не включает в себя приемный GPS-модуль, отличный от приемного GPS-модуля 113.
[0101] Альтернативно, в этом случае, DCM 110 может не включать в себя приемный GPS-модуль 113, и ECU связи между транспортными средствами может включать в себя приемный GPS-модуль и DCM 110, и навигационный ECU 120 может получать позиционную информацию из ECU связи между транспортными средствами. Бортовая система 100 также может включать в себя как ECU автоматического вождения, так и ECU связи между транспортными средствами, при условии, что бортовая система 100 имеет конфигурацию, которая включает в себя только один приемный GPS-модуль.
[0102] В варианте осуществления, описанном выше, DCM 110 имеет приемный GPS-модуль 113, и навигационный ECU 120 имеет модуль 123 обработки преобразования. Тем не менее, DCM 110 может не включать в себя приемный GPS-модуль 113, и навигационный ECU 120 может иметь приемный GPS-модуль. Другими словами, навигационный ECU 120 может иметь приемный GPS-модуль, и в силу этого бортовая система 100 может включать в себя только один приемный GPS-модуль. В этом случае, позиционная информация с непреобразованным датумом может передаваться из приемного GPS-модуля навигационного ECU 120 в DCM 110, и DCM 110 может передавать принимаемую позиционную информацию в центр 20.
[0103] В варианте осуществления, описанном выше, навигационный ECU 120 имеет модуль 123 обработки преобразования. Тем не менее, навигационный ECU 120 может не иметь модуля 123 обработки преобразования, и DCM 110 может иметь модуль обработки преобразования. Это описывается с использованием фиг. 6 и фиг. 7.
Первый модифицированный пример
[0104] Фиг. 6 является видом, показывающим внутренние конфигурации центра 20 и бортовой системы 100M1 системы 10M1 передачи данных согласно модифицированному примеру варианта осуществления. Те компоненты по фиг. 6, которые являются идентичными компонентам, показанным на фиг. 3, обозначаются посредством идентичных ссылок с номерами и не описываются.
[0105] Система 10M1 передачи данных включает в себя центр 20 и бортовую систему 100M1.
[0106] Бортовая система 100M1 имеет DCM 110M1, навигационный ECU 120M1, ECU 130 и CAN 140. DCM 110M1, навигационный ECU 120M1 и ECU 130 соединяются друг с другом через CAN 140.
[0107] DCM 110M1 имеет модуль 111 связи, ECU 112M1 связи, приемный GPS-модуль 113 и запоминающее устройство 114.
[0108] ECU 112M1 связи имеет модуль 112AM1 управления и модуль 112B обработки преобразования. Модуль 112AM1 управления и модуль 112B обработки преобразования представляются как функциональные блоки, показывающие функции программы, выполняемой посредством ECU 112M1 связи.
[0109] Модуль 112B обработки преобразования преобразует датум (глобальный датум) позиционной информации, введенной из приемного GPS-модуля 113, в локальный датум и выводит эту позиционную информацию. Модуль 112B обработки преобразования представляет собой пример первого модуля обработки преобразования.
[0110] Когда модуль 112AM1 управления выводит позиционную информацию, введенную из приемного GPS-модуля 113, в навигационное ECU 120M1, модуль 112AM1 управления преобразует датум позиционной информации, введенной из приемного GPS-модуля 113, из глобального датума в локальный датум посредством модуля 112B обработки преобразования, перед выводом позиционной информации в навигационный ECU 120M1. Модуль 112AM1 управления представляет собой пример первого модуля управления.
[0111] Когда модуль 112AM1 управления выводит позиционную информацию, введенную из приемного GPS-модуля 113, в центр 20, модуль 112AM1 управления выводит позиционную информацию, введенную из приемного GPS-модуля 113, в центр 20 без преобразования датума посредством модуля 112B обработки преобразования.
[0112] Навигационный ECU 120M1 включает в себя главный модуль 121 управления, модуль 122M1 получения позиционной информации, модуль 124 поиска маршрута и запоминающее устройство 125. Навигационный ECU 120M1 имеет конфигурацию, полученную посредством замены модуля 122 получения позиционной информации навигационного ECU 120, показанного на фиг. 3, на модуль 122M1 получения позиционной информации и удаления модуля 123 обработки преобразования из навигационного ECU 120.
[0113] Модуль 122M1 получения позиционной информации получает, через CAN 140, позиционную информацию, которая принята посредством приемного GPS-модуля 113 DCM 110M1, и в которой датум преобразован из глобального датума в локальный датум посредством модуля 112B обработки преобразования ECU 112M1 связи.
[0114] Фиг. 7 является блок-схемой последовательности операций способа, показывающей процесс, выполняемый посредством ECU 112M1 связи DCM 110M1. Процесс от начала до этапа S23 является идентичным процессу от начала до этапа S3, показанному на фиг. 4.
[0115] Когда ECU 112M1 связи определяет то, что наступил момент передавать позиционную информацию в центр 20 (S22: "Да"), ECU 112M1 связи передает позиционную информацию в центр 20 без преобразования датума (этап S23). После выполнения процесса на этапе S23, ECU 112M1 связи переходит к этапу S24.
[0116] С другой стороны, когда ECU 112M1 связи на этапе S22 определяет то, что не наступил момент передавать позиционную информацию в центр 20 (S22: "Нет"), ECU 112M1 связи преобразует датум позиционной информации, принимаемой из приемного GPS-модуля 113, из глобального датума в локальный датум (этап S24). Это служит для того, чтобы преобразовывать датум в датум, который используется посредством навигационного ECU 120M1.
[0117] ECU 112M1 связи передает позиционную информацию с датумом, преобразованным в локальный датум, в навигационный ECU 120M1 (этап S25).
[0118] ECU 112M1 связи определяет то, следует или нет завершать процесс (этап S26). Процесс завершается, когда зажигание или мощность выключается.
[0119] Когда ECU 112M1 связи определяет не завершать процесс (S26: "Нет"), ECU 112M1 связи возвращается к этапу S21. Таким образом, ECU 112M1 связи многократно выполняет последовательность процессов от этапа S21.
[0120] Когда ECU 112M1 связи определяет завершать процесс (S26: "Да"), ECU 112M1 связи завершает процесс ("конец"). Таким образом, последовательности процессов завершаются.
[0121] Как описано выше, ECU 112M1 связи DCM 110M1 бортовой системы 100M1 этого модифицированного примера варианта осуществления имеет модуль 112B обработки преобразования таким образом, что датум позиционной информации, принимаемой посредством приемного GPS-модуля 113 из GPS-спутника, может преобразовываться в бортовой системе 100M1. Поскольку датум позиционной информации, принимаемой из GPS-спутника, представляет собой глобальный датум, эта позиционная информация преобразуется в позиционную информацию на основе локального датума посредством модуля 112B обработки преобразования.
[0122] Поскольку модуль 112B обработки преобразования преобразует позиционную информацию на основе глобального датума, принимаемую из GPS-спутника, в позиционную информацию на основе локального датума, которая используется посредством навигационного ECU 120M1, навигационный ECU 120M1 может выполнять поиск маршрута посредством использования позиционной информации, принимаемой из DCM 110M1 через CAN 140.
[0123] Таким образом, бортовая система 100M1 имеет конфигурацию, которая не включает в себя приемный GPS-модуль, отличный от приемного GPS-модуля 113, включенного в DCM 110M1, и при этом навигационный ECU 120M1 может выполнять поиск маршрута посредством использования позиционной информации на основе локального датума страны, региона и т.д., в котором расположено транспортное средство 50.
[0124] Бортовая система 100M1 этого модифицированного примера включает в себя только один приемный GPS-модуль 113 и в силу этого может реализовывать простую конфигурацию. В силу наличия GPS-антенны и т.д., приемный GPS-модуль 113 требует некоторого пространства для установки. Таким образом, бортовая система 100M1 модифицированного примера позволяет достигать уменьшения размера. Кроме того, бортовая система 100M1 модифицированного примера позволяет достигать снижения затрат посредством реализации простой конфигурации.
[0125] В частности, бортовая система 100M1 этого модифицированного примера может преобразовывать датум позиционной информации при наличии конфигурации, которая включает в себя только один приемный GPS-модуль 113. При такой конфигурации, бортовая система 100M1 реализует упрощение конфигурации, уменьшение размера и снижение затрат.
[0126] В модифицированном примере, описанном с использованием фиг. 6, DCM 110M1 передает позиционную информацию с датумом, непреобразованным посредством модуля 112B обработки преобразования, в центр 20. Тем не менее, DCM 110M1 вместо этого может передавать позиционную информацию с датумом, преобразованным посредством модуля 112B обработки преобразования, в центр 20. В этом случае, центр 20 не должен обязательно включать в себя модуль 2°C обработки преобразования.
[0127] В варианте осуществления, описанном с использованием фиг. 3, DCM 110 включает в себя приемный GPS-модуль 113. Тем не менее, навигационный ECU 120 может включать в себя приемный GPS-модуль, и DCM 110 может не включать в себя приемный GPS-модуль 113. Ниже описывается этот пример с использованием фиг. 8 и фиг. 9.
Второй модифицированный пример
[0128] Фиг. 8 является видом, показывающим внутренние конфигурации центра 20 и бортовой системы 100M2 системы 10M2 передачи данных согласно модифицированному примеру варианта осуществления. Те компоненты по фиг. 8, которые являются идентичными компонентам, показанным на фиг. 3, обозначаются посредством идентичных ссылок с номерами и не описываются.
[0129] Система 10M2 передачи данных включает в себя центр 20 и бортовую систему 100M2.
[0130] Бортовая система 100M2 имеет DCM 110M2, навигационный ECU 120M2, ECU 130 и CAN 140. DCM 110M2, навигационный ECU 120M2 и ECU 130 соединяются друг с другом через CAN 140.
[0131] DCM 110M2 имеет модуль 111 связи, ECU 112M2 связи, запоминающее устройство 114 и модуль 115 получения позиционной информации.
[0132] ECU 112M2 связи имеет модуль 112AM2 управления. Модуль 112AM2 управления представляется как функциональный блок, показывающий функцию программы, выполняемой посредством ECU 112M2 связи.
[0133] Модуль 112AM2 управления выводит позиционную информацию, введенную из навигационного ECU 120M2, в центр 20. В конфигурации по фиг. 8, модуль 112AM2 управления представляет собой пример второго модуля управления.
[0134] Навигационный ECU 120M2 включает в себя главный модуль 121 управления, модуль 123 обработки преобразования, модуль 124 поиска маршрута, запоминающее устройство 125 и приемный GPS-модуль 126. Навигационный ECU 120M2 имеет конфигурацию, полученную посредством удаления модуля 122 получения позиционной информации из навигационного ECU 120, показанного на фиг. 3, и добавления приемного GPS-модуля 126 в навигационный ECU 120. В конфигурации по фиг. 8, навигационный ECU 120M2 представляет собой пример первого модуля управления.
[0135] Модуль 123 обработки преобразования преобразует датум позиционной информации, принимаемой посредством приемного GPS-модуля 126, и передает эту позиционную информацию в главный модуль 121 управления и модуль 124 поиска маршрута. Поскольку датум позиционной информации, принимаемой посредством приемного GPS-модуля 126, представляет собой глобальный датум, модуль 123 обработки преобразования преобразует датум позиционной информации, которая должна использоваться в навигационном ECU 120M2, в локальный датум. Тем не менее, приемный GPS-модуль 126 не преобразует датум позиционной информации, передаваемой из навигационного ECU 120M2 в DCM 110M2. Таким образом, позиционная информация на основе глобального датума передается из навигационного ECU 120M2 в DCM 110M2.
[0136] Фиг. 9 является блок-схемой последовательности операций способа, показывающей процесс, выполняемый посредством навигационного ECU 120M2.
[0137] Навигационный ECU 120M2 начинает процесс, когда зажигание или мощность транспортного средства 50 включается.
[0138] Навигационный ECU 120M2 определяет то, принята или нет позиционная информация из приемного GPS-модуля 126 (этап S31). Навигационный ECU 120M2 многократно выполняет процесс на этапе S31 до определения того, что позиционная информация принята.
[0139] Когда навигационный ECU 120M2 определяет то, что позиционная информация принята (S31: "Да"), навигационный ECU 120M2 определяет то, наступил или нет момент передавать позиционную информацию в DCM 110M2 (этап S32). Это обусловлено тем, что DCM 110M2 передает позиционную информацию в центр 20 один раз в предварительно определенное время. Например, предварительно определенное время составляет 30 секунд.
[0140] Когда навигационный ECU 120M2 определяет то, что наступил момент передавать позиционную информацию в DCM 110M2 (S32: "Да"), навигационный ECU 120M2 передает позиционную информацию в DCM 110M2 без преобразования датума (этап S33). После выполнения процесса на этапе S33, навигационный ECU 120M2 переходит к этапу S34.
[0141] С другой стороны, когда навигационный ECU 120M2 на этапе S32 определяет то, что не наступил момент передавать позиционную информацию в DCM 110M2 (S32: "Нет"), навигационный ECU 120M2 преобразует датум позиционной информации, принимаемой посредством приемного GPS-модуля 126, из глобального датума в локальный датум (этап S34). Это служит для того, чтобы преобразовывать датум в датум, который используется в навигационном ECU 120M2. Позиционная информация с датумом, преобразованным в локальный датум, используется посредством главного модуля 121 управления и модуля 124 поиска маршрута. Например, главный модуль 121 управления показывает текущую позицию на дисплее навигационного устройства, и модуль 124 поиска маршрута предоставляет навигацию на основе инструкций по маршруту или выполняет поиск маршрута, посредством использования позиционной информации на основе локального датума.
[0142] Навигационный ECU 120M2 определяет то, следует или нет завершать процесс (этап S35). Процесс завершается, когда зажигание или мощность выключается.
[0143] Когда навигационный ECU 120M2 определяет не завершать процесс (S35: "Нет"), навигационный ECU 120M2 возвращается к этапу S31. Таким образом, навигационный ECU 120M2 многократно выполняет последовательность процессов от этапа S31.
[0144] Когда навигационный ECU 120M2 определяет завершать процесс (S35: "Да"), навигационный ECU 120M2 завершает процесс ("конец"). Таким образом, последовательности процессов завершаются.
[0145] Как описано выше, навигационный ECU 120M2 бортовой системы 100M2 этого модифицированного примера варианта осуществления имеет модуль 123 обработки преобразования и приемный GPS-модуль 126 таким образом, что датум позиционной информации, принимаемой посредством приемного GPS-модуля 126 из GPS-спутника, может преобразовываться в бортовой системе 100M2. Поскольку датум позиционной информации, принимаемой из GPS-спутника, представляет собой глобальный датум, эта позиционная информация преобразуется посредством модуля 123 обработки преобразования в позиционную информацию на основе локального датума, который используется в навигационном ECU 120M2.
[0146] Следовательно, навигационный ECU 120M2 может выполнять поиск маршрута посредством использования позиционной информации, которая принята посредством приемного GPS-модуля 126, и в которой датум преобразован в локальный датум посредством модуля 123 обработки преобразования.
[0147] Таким образом, бортовая система 100M2 имеет конфигурацию, которая не включает в себя приемный GPS-модуль, отличный от приемного GPS-модуля 126, включенного в навигационный ECU 120M2, и при этом навигационный ECU 120M2, может выполнять поиск маршрута посредством использования позиционной информации на основе локального датума страны, региона и т.д., в котором расположено транспортное средство 50.
[0148] Поскольку навигационный ECU 120M2 передает позиционную информацию с непреобразованным датумом в DCM 110M2, DCM 110M2 может передавать позиционную информацию на основе глобального датума в центр 20.
[0149] Бортовая система 100M2 этого модифицированного примера варианта осуществления может преобразовывать датум позиционной информации при наличии конфигурации, которая включает в себя только один приемный GPS-модуль 126. При такой конфигурации, бортовая система 100M2 реализует упрощение конфигурации, уменьшение размера и снижение затрат.
[0150] В модифицированном примере, описанном здесь, навигационный ECU 120M2 передает позиционную информацию с непреобразованным датумом в DCM 110M2, и DCM 110M2 передает позиционную информацию на основе глобального датума в центр 20. Тем не менее, когда локальный датум, используемый посредством навигационного ECU 120M2, и локальный датум, в который преобразуется датум позиционной информации в центре 20, являются идентичными, навигационный ECU 120M2 может передавать позиционную информацию с датумом, преобразованным в локальный датум, в DCM 110M2, и DCM 110M2 может передавать позиционную информацию на основе локального датума в центр 20.
[0151] В варианте осуществления, описанном с использованием фиг. 3, DCM 110 включает в себя приемный GPS-модуль 113, и навигационный ECU 120 включает в себя модуль 123 обработки преобразования. Тем не менее, DCM 110 может не включать в себя приемный GPS-модуль 113, и навигационный ECU 120 может не включать в себя модуль 123 обработки преобразования, и бортовая система 100 может включать в себя, отдельно от DCM 110 и навигационного ECU 120, ECU, который включает в себя приемный GPS-модуль или соединяется с приемным GPS-модулем. Ниже описывается этот пример с использованием фиг. 10.
Третий модифицированный пример
[0152] Фиг. 10 является видом, показывающим внутренние конфигурации центра 20 и бортовой системы 100M3 системы 10M3 передачи данных согласно модифицированному примеру варианта осуществления. Те компоненты по фиг. 10, которые являются идентичными компонентам, показанным на фиг. 3, обозначаются посредством идентичных ссылок с номерами и не описываются.
[0153] Система 10M3 передачи данных включает в себя центр 20 и бортовую систему 100M3.
[0154] Бортовая система 100M3 имеет DCM 110M3, навигационный ECU 120M3, ECU 130, CAN 140 и ECU 150 получения позиционной информации. DCM 110M3, навигационный ECU 120M3, ECU 130 и ECU 150 получения позиционной информации соединяются друг с другом через CAN 140. В конфигурации по фиг. 10, ECU 150 получения позиционной информации представляет собой пример первого модуля управления.
[0155] DCM 110M3 имеет модуль 111 связи, ECU 112M3 связи и запоминающее устройство 114. DCM 110M3 имеет конфигурацию, полученную посредством удаления приемного GPS-модуля 113 из DCM 110, показанного на фиг. 3.
[0156] ECU 112M3 связи имеет модуль 112AM3 управления. Модуль 112AM3 управления представляется как функциональный блок, показывающий функцию программы, выполняемой посредством ECU 112M3 связи. В конфигурации по фиг. 8, модуль 112AM3 управления или навигационный ECU 120M3 представляет собой пример второго модуля управления.
[0157] Модуль 112AM3 управления управляет началом, завершением и т.д. связи модуля 111 связи, вводом и выводом данных, передаваемых или принимаемых в беспроводной передаче данных, и т.д. Модуль 112AM3 управления выводит позиционную информацию, введенную из ECU 150 получения позиционной информации, в центр 20.
[0158] Запоминающее устройство 114 временно хранит данные и т.д., передаваемые или принимаемые посредством ECU 112M3 связи через модуль 111 связи, и сохраняет программу и т.д., требуемую для DCM 110M3 с тем, чтобы выполнять процесс связи.
[0159] Навигационный ECU 120M3 включает в себя главный модуль 121 управления, модуль 122M3 получения позиционной информации, модуль 124 поиска маршрута и запоминающее устройство 125. Навигационный ECU 120M3 отличается от навигационного ECU 120M1, показанного на фиг. 6, тем, что модуль 122M3 получения позиционной информации получает позиционную информацию из ECU 150 получения позиционной информации.
[0160] ECU 150 получения позиционной информации имеет модуль 151 управления, приемный GPS-модуль 152 и модуль 153 обработки преобразования. Приемный GPS-модуль 152 и модуль 153 обработки преобразования являются идентичными приемному GPS-модулю 113 и модулю 112B обработки преобразования, соответственно, DCM 110M1, показанного на фиг. 6.
[0161] Аналогично бортовой системе 100M3, показанной на фиг. 10, приемный GPS-модуль 152 ECU 150 получения позиционной информации, предоставленного отдельно от DCM 110M3 и навигационного ECU 120M3, может получать позиционную информацию, и модуль 151 управления может передавать эту позиционную информацию в DCM 110M3 и навигационный ECU 120M3 через CAN 140.
[0162] Модуль 153 обработки преобразования не преобразует датум позиционной информации, которая должна передаваться в DCM 110M3, а преобразует датум позиционной информации, которая должна передаваться в навигационный ECU 120M3.
[0163] ECU 112M3 связи DCM 110M3 передает позиционную информацию, полученную из ECU 150 получения позиционной информации, в центр 20, и навигационный ECU 120M3 выполняет поиск маршрута и т.д. посредством использования позиционной информации, полученной из ECU 150 получения позиционной информации.
[0164] Фиг. 11 является блок-схемой последовательности операций способа, показывающей процесс, выполняемый посредством ECU 150 получения позиционной информации.
[0165] ECU 150 получения позиционной информации начинает процесс, когда зажигание или мощность транспортного средства 50 включается.
[0166] ECU 150 получения позиционной информации определяет то, принимает или нет приемный GPS-модуль 152 позиционную информацию (этап S41). ECU 150 получения позиционной информации многократно выполняет процесс на этапе S41 до определения того, что позиционная информация принята.
[0167] Когда ECU 150 получения позиционной информации определяет то, что позиционная информация принята (S41: "Да"), ECU 150 получения позиционной информации определяет то, наступил или нет момент передавать позиционную информацию в DCM 110M3 (этап S42). Это обусловлено тем, что DCM 110M3 передает позиционную информацию в центр 20 один раз в предварительно определенное время. Например, предварительно определенное время составляет 30 секунд.
[0168] Когда ECU 150 получения позиционной информации определяет то, что наступил момент передавать позиционную информацию в DCM 110M3 (S42: "Да"), ECU 150 получения позиционной информации передает позиционную информацию в DCM 110M3 без преобразования датума (этап S43). После выполнения процесса на этапе S43, ECU 150 получения позиционной информации переходит к этапу S44.
[0169] С другой стороны, когда ECU 150 получения позиционной информации на этапе S42 определяет то, что не наступил момент передавать позиционную информацию в DCM 110M3 (S42: "Нет"), ECU 150 получения позиционной информации преобразует датум позиционной информации, принимаемой посредством приемного GPS-модуля 152, из глобального датума в локальный датум (этап S44). Это служит для того, чтобы преобразовывать датум в датум, который используется посредством навигационного ECU 120M3.
[0170] ECU 150 получения позиционной информации передает позиционную информацию с преобразованным датумом на этапе S44 в навигационный ECU 120M3 (этап S45). Таким образом, навигационный ECU 120M3 может выполнять процессы, включающие в себя показ текущей позиции транспортного средства 50, предоставление навигации на основе инструкций по маршруту и выполнение поиска маршрута.
[0171] ECU 150 получения позиционной информации определяет то, следует или нет завершать процесс (этап S46). Процесс завершается, когда зажигание или мощность выключается.
[0172] Когда ECU 150 получения позиционной информации определяет не завершать процесс (S46: "Нет"), ECU 150 получения позиционной информации возвращается к этапу S41. Таким образом, ECU 150 получения позиционной информации многократно выполняет последовательность процессов от этапа S41.
[0173] Когда ECU 150 получения позиционной информации определяет завершать процесс (S46: "Да"), ECU 150 получения позиционной информации завершает процесс ("конец"). Таким образом, последовательности процессов завершаются.
[0174] Как описано выше, ECU 150 получения позиционной информации, отличный от DCM 110M3 и навигационного ECU 120M3, бортовой системы 100M3 этого модифицированного примера варианта осуществления, имеет приемный GPS-модуль 152 и модуль 153 обработки преобразования таким образом, что датум позиционной информации, принимаемой посредством приемного GPS-модуля 152 из GPS-спутника, может преобразовываться в бортовой системе 100M3. Поскольку датум позиционной информации, принимаемой из GPS-спутника, представляет собой глобальный датум, эта позиционная информация передается в навигационный ECU 120M3 после того, как датум преобразуется в локальный датум посредством модуля 153 обработки преобразования.
[0175] Следовательно, навигационный ECU 120M3 может выполнять поиск маршрута посредством использования позиционной информации, которая принята посредством приемного GPS-модуля 152, и в которой датум преобразован в локальный датум посредством модуля 153 обработки преобразования.
[0176] Таким образом, бортовая система 100M3 имеет конфигурацию, которая не включает в себя приемный GPS-модуль, отличный от приемного GPS-модуля 152, включенного в ECU 150 получения позиционной информации, и при этом навигационный ECU 120M3, может выполнять поиск маршрута посредством использования позиционной информации на основе локального датума страны, региона и т.д., в котором расположено транспортное средство 50.
[0177] Поскольку ECU 150 получения позиционной информации передает позиционную информацию с непреобразованным датумом в DCM 110M3, DCM 110M3 может передавать позиционную информацию на основе глобального датума в центр 20.
[0178] Бортовая система 100M3 этого модифицированного примера варианта осуществления может преобразовывать датум позиционной информации при наличии конфигурации, которая включает в себя только один приемный GPS-модуль 152. При такой конфигурации, бортовая система 100M3 реализует упрощение конфигурации, уменьшение размера и снижение затрат.
[0179] Раскрыты следующие пункты 1-7: (Пункт 1) Система передачи данных, включающая в себя сервер и бортовую систему, которая выполняет беспроводной обмен данными с сервером. Бортовая система включает в себя: модуль приема позиционной информации, который принимает позиционную информацию из спутниковой системы позиционирования; первый модуль управления, который включает в себя модуль приема позиционной информации или соединяется с модулем приема позиционной информации; линию связи, соединенную с первым модулем управления; и второй модуль управления, который соединяется с первым модулем управления через линию связи и имеет первый модуль обработки преобразования, который преобразует датум позиционной информации. Первый модуль управления передает позиционную информацию, принимаемую посредством модуля приема позиционной информации, во второй модуль управления через линию связи, и второй модуль управления преобразует датум позиционной информации, принимаемой из первого модуля управления, посредством первого модуля обработки преобразования. (Пункт 2) Система передачи данных, включающая в себя сервер и бортовую систему, которая выполняет беспроводной обмен данными с сервером. Бортовая система включает в себя: модуль приема позиционной информации, который принимает позиционную информацию из спутниковой системы позиционирования; первый модуль управления, который включает в себя модуль приема позиционной информации или соединяется с модулем приема позиционной информации и имеет первый модуль обработки преобразования, который преобразует датум позиционной информации; линию связи, соединенную с первым модулем управления; и второй модуль управления, соединенный с первым модулем управления через линию связи. Первый модуль управления преобразует датум позиционной информации, принимаемой посредством модуля приема позиционной информации, посредством первого модуля обработки преобразования, и передает позиционную информацию с преобразованным датумом во второй модуль управления через линию связи. (Пункт 3) Система передачи данных согласно пункту 1 или 2, в которой: бортовая система дополнительно включает в себя модуль связи, который обменивается данными с сервером; первый модуль управления включает в себя модуль связи или соединяется с модулем связи и передает позиционную информацию с непреобразованным датумом на сервер через модуль связи; и сервер включает в себя второй модуль обработки преобразования, который преобразует датум позиционной информации из спутниковой системы позиционирования и преобразует датум позиционной информации, принимаемой из первого модуля управления, посредством второго модуля обработки преобразования. (Пункт 4) Система передачи данных согласно любому из пунктов 1-3, при этом система передачи данных не включает в себя модуль приема позиционной информации, который принимает позиционную информацию из спутниковой системы позиционирования, отличный от модуля приема позиционной информации. (Пункт 5) Способ управления бортовой системы, включающей в себя: модуль приема позиционной информации, который принимает позиционную информацию из спутниковой системы позиционирования; первый модуль управления, который включает в себя модуль приема позиционной информации или соединяется с модулем приема позиционной информации; линию связи, соединенную с первым модулем управления; и второй модуль управления, который соединяется с первым модулем управления через линию связи и имеет первый модуль обработки преобразования, который преобразует датум позиционной информации. Способ управления включает в себя: передачу позиционной информации, принимаемой посредством модуля приема позиционной информации, из первого модуля управления во второй модуль управления через линию связи; и преобразование датума позиционной информации, принимаемой из первого модуля управления, посредством первого модуля обработки преобразования второго модуля управления. (Пункт 6) Способ управления бортовой системы, включающей в себя: модуль приема позиционной информации, который принимает позиционную информацию из спутниковой системы позиционирования; первый модуль управления, который включает в себя модуль приема позиционной информации или соединяется с модулем приема позиционной информации и имеет первый модуль обработки преобразования, который преобразует датум позиционной информации; линию связи, соединенную с первым модулем управления; и второй модуль управления, соединенный с первым модулем управления через линию связи. Способ управления включает в себя: преобразование датума позиционной информации, принимаемой посредством модуля приема позиционной информации, посредством первого модуля обработки преобразования первого модуля управления; и передачу позиционной информации с преобразованным датумом во второй модуль управления через линию связи. (Пункт 7) Способ управления бортовой системы согласно пункту 6 или 7, в котором бортовая система не включает в себя модуль приема позиционной информации, который принимает позиционную информацию из спутниковой системы позиционирования, отличный от модуля приема позиционной информации.
[0180] Хотя выше описываются бортовая система, система передачи данных, способ управления бортовой системой и способ программного управления иллюстративных вариантов осуществления настоящего изобретения, настоящее изобретение не ограничено конкретными раскрытыми вариантами осуществления, но может изменяться или модифицироваться различными способами в пределах сущности изобретения.
Реферат
Изобретение относится к бортовой системе. Техническим результатом является предоставление возможности бортовой системе преобразовывать датум при наличии простой конфигурации. Бортовая система включает в себя: модуль приема позиционной информации, выполненный с возможностью принимать позиционную информацию из спутниковой системы позиционирования; первый модуль управления; линию связи, соединенную с первым модулем управления; и второй модуль управления, который соединяется с первым модулем управления через линию связи и имеет первый модуль обработки преобразования, выполненный с возможностью преобразовывать датум позиционной информации. Первый модуль управления выполнен с возможностью передавать позиционную информацию, принимаемую посредством модуля приема позиционной информации, во второй модуль управления через линию связи, и второй модуль управления выполнен с возможностью преобразовывать датум позиционной информации, принимаемой из первого модуля управления, посредством первого модуля обработки преобразования. 3 н. и 8 з.п. ф-лы, 11 ил.
Комментарии