Выявление глубины воды для планирования и отслеживания маршрута движения транспортного средства - RU2686159C2
Код документа: RU2686159C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к планированию и отслеживанию маршрута движения транспортного средства, а точнее, к выявлению глубины воды.
УРОВЕНЬ ТЕХНИКИ
Во время ливневого паводка и опасных погодных условий, уровни воды на улицах могут достигать опасных уровней вследствие непригодной системы водоотвода и/или местной географии. Зачастую, когда улицы подтоплены, водители неверно оценивают глубину воды, через которую могут переехать их транспортные средства. Это приводит к серьезным повреждениям транспортного средства и может ставить водителя в затруднительное положение
Сущность изобретения
Прилагаемая формула изобретения устанавливает границы этой заявки. Настоящее изобретение обобщает аспекты вариантов осуществления и не должно использоваться для ограничения формулы изобретения. Другие реализации предполагаются в соответствии с технологиями, описанными в материалах настоящей заявки, как будет очевидно рядовому специалисту в данной области техники по изучению нижеследующих чертежей и подробного описания, и подразумевается, что эти реализации должны подпадать под объем этой заявки.
Раскрыты примерные варианты осуществления для планирования и отслеживания маршрута движения транспортного средства с выявлением глубины воды. Примерный раскрытый способ включает в себя определение текущей и прогнозной глубины воды для участков дороги на и около текущего маршрута в пункт назначения. Кроме того, примерный способ включает в себя, в ответ на текущую или прогнозную глубину воды на участках дороги текущего маршрута, превышающую первое пороговое значение, определение альтернативного маршрута в пункт назначения.
В дополнительном аспекте назначают уровни риска участкам дороги на и вокруг текущего маршрута в пункт назначения на основании дорожного просвета транспортного средства и текущей и прогнозной глубины воды участков дороги на и вокруг текущего маршрута в пункт назначения.
В другом дополнительном аспекте определение альтернативного маршрута в пункт назначения заключается в том, что: сравнивают уровни риска участков дороги на и вокруг текущего маршрута в пункт назначения; и выбирают альтернативный маршрут, чтобы содержал участки дороги с более низкими совместными уровнями риска.
В еще одном дополнительном аспекте корректируют уровни риска на основании метеорологических данных, принятых с метеостанции, расположенной рядом с одним из участков дороги.
В еще одном дополнительном аспекте корректируют уровни риска на основании метеорологических данных, принятых с метеорологического беспилотного летательного аппарата, измеряющего глубину воды одного из участков дороги.
В еще одном дополнительном аспекте определяют текущую и прогнозную глубину воды для участков дороги на и вокруг текущего маршрута в пункт назначения на основании метеорологических данных и ретроспективных данных подтопления, принятых с внешнего сервера.
В еще одном дополнительном аспекте метеорологические данные включают в себя текущие и ожидаемые дождевые осадки, а ретроспективные данные подтопления включают в себя предыдущие измерения глубины воды для участков дороги, связанных с текущими и предыдущими дождевыми осадками.
В еще одном дополнительном аспекте ретроспективные данные подтопления включают в себя ретроспективные местоположения транспортных средств, покинутых вследствие подтопления.
Примерное транспортное средство включает в себя память и процессор. Память хранит команды для планирования и отслеживания маршрута движения транспортного средства с выявлением глубины воды. Примерный процессор выполняет команды, чтобы побуждать транспортное средство определять текущую или прогнозную глубину воды для участков дороги на или около текущего маршрута в пункт назначения. Кроме того, команды побуждают транспортное средство, в ответ на текущую или прогнозную глубину воды на участках дороги текущего маршрута, превышающую первое пороговое значение, определять альтернативный маршрут в пункт назначения.
В дополнительном аспекте команды побуждают транспортное средство назначать уровни риска участкам дороги на и около текущего маршрута в пункт назначения на основании дорожного просвета транспортного средства и текущей и прогнозной глубины воды участков дороги на и около текущего маршрута в пункт назначения.
В другом дополнительном аспекте для определения альтернативного маршрута в пункт назначения команды побуждают транспортное средство: сравнивать уровни риска участков дороги на и около текущего маршрута в пункт назначения; и выбирать альтернативный маршрут, включающий в себя сегменты дороги с более низкими уровнями риска.
В еще одном дополнительном аспекте команды побуждают транспортное средство корректировать уровни риска на основании метеорологических данных, принятых с метеостанции, расположенной рядом с одним из участков дороги.
В еще одном дополнительном аспекте команды побуждают транспортное средство корректировать уровни риска на основании метеоданных, принятых с метеорологического беспилотного летательного аппарата, измеряющего глубину воды одного из участков дороги.
В еще одном дополнительном аспекте команды побуждают транспортное средство определять текущую и прогнозную глубину воды для участков дороги на и около текущего маршрута в пункт назначения на основании метеорологических данных и ретроспективных данных подтопления, принятых с внешнего сервера.
В еще одном дополнительном аспекте метеорологические данные включают в себя текущие и ожидаемые дождевые осадки, а ретроспективные данные подтопления включают в себя предыдущие измерения глубины воды для участков дороги, связанные с текущими и предыдущими дождевыми осадками.
В еще одном дополнительном аспекте ретроспективные данные подтопления включают в себя ретроспективные местоположения транспортных средств, покинутых вследствие подтопления.
Материальный машинно-читаемый запоминающий носитель содержит команды, которые, когда исполняются, побуждают транспортное средство определять текущую или прогнозную глубину воды для участков дороги на или около текущего маршрута в пункт назначения. Команды также побуждают транспортное средство, в ответ на текущую или прогнозную глубину воды на участках дороги текущего маршрута, превышающую первое пороговое значение, определять альтернативный маршрут в пункт назначения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ради лучшего понимания изобретения, может быть сделана ссылка на варианты осуществления, показанные на нижеследующих чертежах. Компоненты на чертежах не обязательно находятся в масштабе, и связанные элементы могут быть опущены или, в некоторых случаях, могли быть преувеличены пропорции, с тем чтобы подчеркнуть и ясно проиллюстрировать обладающие новизной признаки, описанные в материалах настоящей заявки. В дополнение, компоненты системы могут быть скомпонованы по-разному, как известно в данной области техники. Кроме того, на чертежах, одинаковые номера ссылок обозначают соответствующие части на всем протяжении нескольких видов.
Фиг. 1 иллюстрирует транспортное средство, функционирующее в соответствии с доктринами данного изобретения.
Фиг. 2 изображает примерную карту с показателями риска по глубине воды.
Фиг. 3 - структурная схема электронных компонентов транспортного средства по фиг. 1.
Фиг. 4 - блок-схема последовательности операций способа для планирования и отслеживания маршрута движения транспортного средства с выявлением глубины воды, который может быть реализован электронными компонентами по фиг. 3.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Несмотря на то, что изобретение может быть воплощено в различных формах, на чертежах показаны и будут описаны в дальнейшем некоторые примерные и неограничивающие варианты осуществления с пониманием, что настоящее раскрытие должно считаться иллюстративным примером изобретения и не подразумевается, что должно ограничивать изобретение проиллюстрированными конкретными вариантами осуществления.
Во время периода дождей, значительные количества воды могут накапливаться на дроге вследствие подтопления или плохого водоотвода. Как правило, водители должны избегать подтопленных проезжих частей дороги. Вода в шесть дюймов глубиной может вызывать повреждение у транспортного средства, и транспортные средства могут быть унесены в воде, которая имеет двенадцать дюймов в глубину. Однако, в некоторых случаях, водителю нужно, если имеет возможность, преодолеть подтопленную проезжую часть дороги. Однако, во время вождения, трудно оценить глубину накопившейся воды, главным образом потому, что вода скрывает глубину на дороге. Дополнительно, трудно узнавать состояние возможных альтернативных маршрутов. Как раскрыто ниже, определитель глубины воды принимает навигационные данные, метеорологические данные и/или ретроспективные данные подтопления, и т. д., для определения текущей и/или будущей глубины воды на проезжей части дороги. Определитель глубины воды отображает карту водителю, показывая подтопленные зоны и подсвечивая те, которые известно, что должны быть опасны для транспортного средства. В некоторых примерах, определитель глубины воды выдает один или более альтернативных маршрутов в пункт назначения транспортного средства. В некоторых примерах, определитель глубины воды управляет гидравликой и жесткостью амортизаторов, чтобы оставаться как можно выше от земли при проезде по подтопленным проезжим частям дороги.
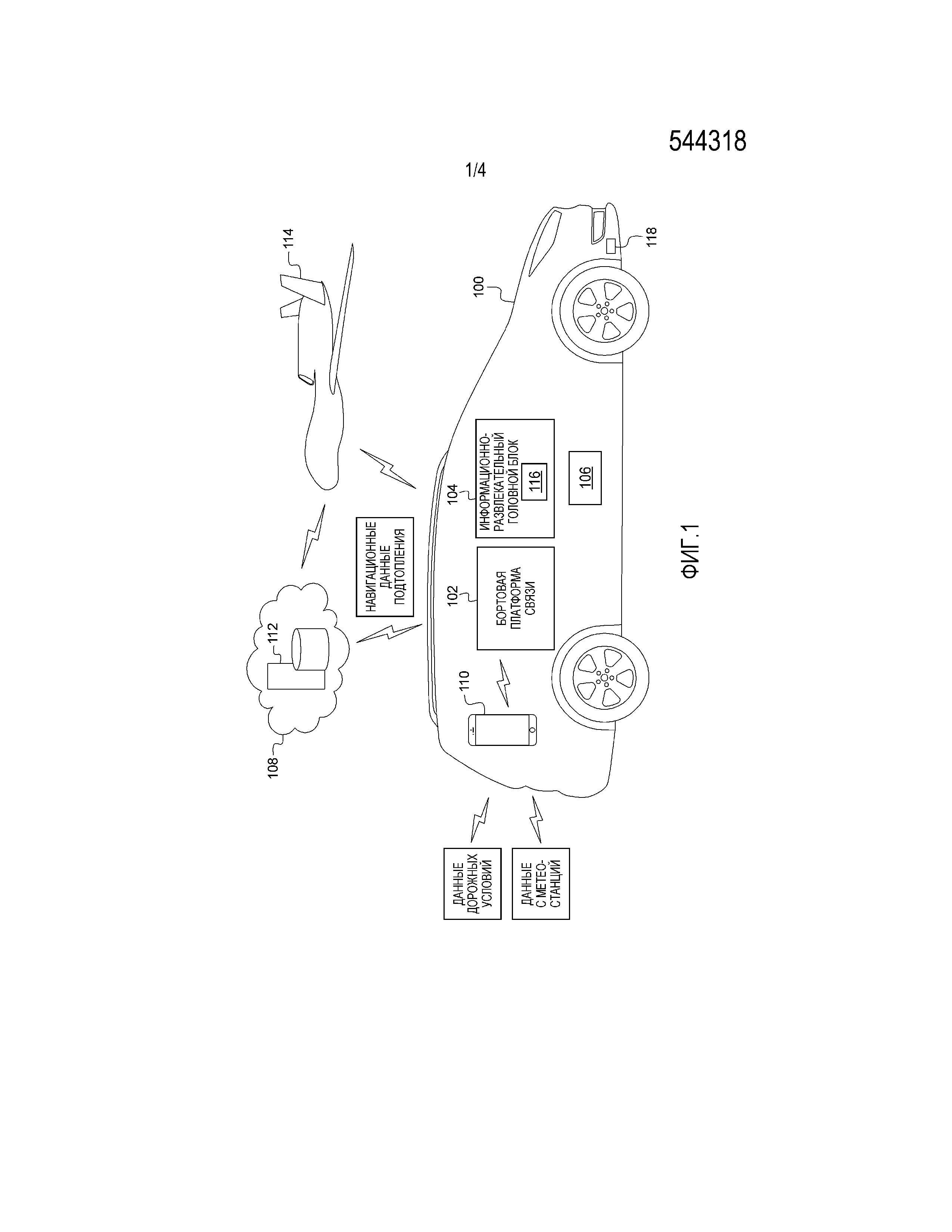
Фиг. 1 иллюстрирует транспортное средство 100, функционирующее в соответствии с доктринами данного изобретения. Транспортное средство 100 может быть обычным транспортным средством с бензиновым силовым приводом, транспортным средством с гибридным приводом, транспортным средством с электрическим приводом, транспортным средством на топливных элементах и/или любым другим реализующим подвижность типом транспортного средства. Транспортное средство 100 включает в себя части, связанные с подвижностью, такие как силовая передача с двигателем, трансмиссия, подвеска, ведущий вал и/или колеса, и т. д. Транспортное средство 100 может быть неавтономным, полуавтономным (например, с некоторыми типовыми двигательными функциями, управляемыми транспортным средством 100) или автономным (например, двигательные функции управляются транспортным средством 100 без непосредственного водительского ввода). В проиллюстрированном примере, транспортное средство 100 включает в себя бортовую платформу 102 связи, информационно-развлекательный головной блок 104 и определитель 106 глубины воды.
Бортовая платформа 102 связи включает в себя проводной или беспроводный сетевые интерфейсы, чтобы давать возможность связи с внешними сетями 108. Бортовая платформа 102 связи также включает в себя аппаратные средства (например, процессоры, память, хранилище, антенну, и т. д.) и программное обеспечение для управления проводными и беспроводными сетевыми интерфейсами. В проиллюстрированном примере, бортовая платформа 102 связи включает в себя один или более контроллеров связи для основанных на других стандартах сетей (например, глобальной системы мобильной связи (GSM), универсальной системы мобильной связи, (UMTS), долгосрочного развития (LTE), множественного доступа с кодовым разделением каналов (CDMA), WiMAX (IEEE 802.16m); связи через поле в ближней зоне (NFC); локальной беспроводной сети (в том числе, IEEE 802.11 a/b/g/n/ac или других) и Wireless Gigabit (IEEE 802.11ad), и т. д.). В некоторых примерах, бортовая платформа 102 связи включает в себя проводной или беспроводный интерфейс (например, вспомогательный порт, порт универсальной последовательной шины (USB), узел беспроводной связи Bluetooth®, и т. д.), чтобы с возможностью обмена информацией связываться с мобильным устройством (например, смартфоном, интеллектуальными часами, планшетом, и т. д.). В некоторых примерах, бортовая платформа 102 связи включает в себя приемник глобальной системы определения местоположения (GPS), который выдает координаты транспортного средства 100.
Дополнительно или в качестве альтернативы, в некоторых примерах, бортовая платформа 102 связи включает в себя контроллер специализированной связи ближнего действия (DSRC) для поддержания связи с другими находящимися поблизости транспортными средствами и/или узлами беспроводной связи, установленными на инфраструктуре (такой как метеостанции, светофоры, мосты, здания, и т. д.). DSRC является реализацией связи между транспортными средствами (V2V) и между транспортным средством и инфраструктурой (V2I). Может использоваться любая другая реализация. Дополнительная информация о сети DSRC и о том, как сеть может поддерживать связь с аппаратными средствами и программным обеспечением транспортного средства, доступна в отчете по Спецификации системных требований (SyRS) от июня 2011 года центрального аппарата Министерства транспорта США (доступном на http://www.its.dot.gov/meetings/pdf/CoreSystem_SE_SyRS_RevA%20(2011-06-13).pdf), который таким образом включен в состав посредством ссылки во всей своей полноте наряду со всеми документами, упомянутыми на страницах с 11 по 14 отчета SyRS. В некоторых примерах, транспортное средство 100 может поддерживать связь с внешней сетью 108 через контроллер DSRC. В некоторых примерах, транспортное средство принимает, через контроллер DSRC, текущие данные дорожных условий (например, данные накопления воды в реальном времени, и т. д.) из узлов инфраструктуры, с других транспортных средств и/или метеостанций. Дополнительно, в некоторых примерах, бортовая платформа 102 связи включает в себя вспомогательный порт для проводного соединения и/или модуль беспроводной связи ближнего действия для беспроводного присоединения к мобильному устройству 110 (например, смартфону, интеллектуальным часам, планшету, и т. д.). Модуль беспроводной связи ближнего действия включает в себя аппаратные средства и зашитые программы для установления соединения с мобильным устройством 110. В некоторых примерах, модуль беспроводной связи ближнего действия реализует протоколы Bluetooth и/или Bluetooth с низким потреблением энергии (BLE). Протоколы Bluetooth и BLE изложены в томе 6 Спецификации Bluetooth версии 4.0 (и последующих редакциях), поддерживаемой Специальной группой по интересам Bluetooth. В некоторых примерах, бортовая платформа 102 связи присоединяется к внешней сети 108 через мобильное устройство 110. В таких примерах, транспортное средство 100 может поддерживать связь с внешней сетью 108 через присоединенное мобильное устройство.
Внешняя сеть(и) 108 может быть сетью общего пользования, такой как сеть Интернет; частной сетью, такой как интранет (локальная сеть, использующая технологии Интернет); или их комбинацией, и может использовать многообразие сетевых протоколов, имеющихся в распоряжении в настоящее время или разработанных позже, в том числе, но не в качестве ограничения, основанные на TCP/IP сетевые протоколы. Транспортное средство 100 поддерживает связь с одним или более серверов 112. Серверы 112 поддерживаются любыми пригодными хозяйствующими субъектами с заинтересованностью в погоде и/или навигации, такими как правительственная организация (например, Национальная метеорологическая служба, Национальное управление по проблемам океана и атмосферы, и т. д.), коммерческий поставщик услуг по прогнозу погоды (например, AccuWeather®, Weather Underground®, и т. д.) и/или картографическая служба (например, Google® Maps, Apple® Maps, Waze®, и т. д.), и т. д. В некоторых примерах, транспортное средство 100 осуществляет доступ к данным с серверов 112 через интерфейсы прикладного программирования (API), предусмотренные управляющим субъектом. Серверы 112 выдают данные погоды и движения транспорта. Например, серверы 112 могут предоставлять (a) реальные метеорологические данные (например, текущие дождевые осадки, прогнозные дождевые осадки, ожидаемая скорость накопления, и т. д.), (b) ретроспективные данные подтопления (например, обычно подтапливаемые зоны, ретроспективные местоположения покинутых транспортных средств, ретроспективное накопление воды), (c) навигационные данные (например, данные участка дороги для области вокруг транспортного средства 100) и/или (d) данные с метеорологического беспилотного летательного аппарата (например, данные накопления воды в реальном времени, данные выявления опасности, и т. д.), и т. д. В некоторых примерах, данные, принятые с серверов 112, ограничены данными в пределах географической области вокруг местоположения транспортного средства 100 (например, предоставленными через API). В качестве используемого в материалах настоящей заявки, участок дороги является непрерывным отрезком дороги, который имеет общие характеристики (например, конфигурацию полос движения, ограничение скорости, возвышение, уклон, изгиб, и т. д.). Например, участок дороги может представлять собой часть дороги между двумя перекрестками.
Информационно-развлекательный головной блок 104 предусматривает интерфейс между транспортным средством 100 и пользователем. Информационно-развлекательный головной блок 104 включает в себя цифровые и/или аналоговые интерфейсы (например, устройства ввода и устройства вывода) для приема ввода от пользователя(ей) и отображения информации. Устройства ввода, например, могут включать в себя ручку управления, приборную панель, цифровую камеру для захвата изображений и/или визуального распознавания команд, сенсорный экран, устройство звукового ввода (например, микрофон в кабине), кнопки или сенсорную площадку. Устройства вывода могут включать в себя средства вывода комбинации приборов (например, круговые шкалы, осветительные устройства), исполнительные механизмы, проекционный дисплей на ветровом стекле, устройство отображения центральной консоли (например, жидкокристаллический дисплей («LCD»), дисплей на органических светоизлучающих диодах («OLED»), плоскопанельный дисплей, твердотельный дисплей, и т. д.) и/или громкоговорители. В проиллюстрированном примере, информационно-развлекательный головной блок 104 включает в себя аппаратные средства (например, процессор или контроллер, память, запоминающее устройство, и т. д.) и программное обеспечение (например, операционную систему, и т. д.) для информационно-развлекательной системы 116 (такой как SYNC® и MyFord Touch® от Ford®, Entune® от Toyota®, IntelliLink® от GMC®, и т. д.). Дополнительно, информационно-развлекательный головной блок 104, например, отображает информационно-развлекательную систему 116 на устройстве отображения центральной консоли. Информационно-развлекательная система 116 включает в себя навигационное приложение, которое отображает карту (например, карту 200 по фиг. 2, приведенной ниже) и выдает навигационные указания.
Определитель 106 глубины воды оценивает текущую глубину воды под транспортным средством 100, глубину воды на текущем маршруте и окружающих маршрутах, достигла ли текущая глубина воды порогового значения предупреждения, и превышает ли глубина воды или ожидается, что превысит предельное значение глубины транспортного средства 100 на маршруте ко времени, когда транспортное средство прибывает туда. Как показано ниже на фиг. 2, определитель 106 глубины воды обновляет карту 200, чтобы предупреждать водителя о текущем уровне воды или ожидаемых уровнях воды на маршруте. В некоторых примерах, определитель 106 глубины воды анализирует участки дороги между текущим местоположением транспортного средства 100 и пунктом назначения, чтобы определять, есть ли маршрут, который включает в себя участки дороги с меньшим показателем риска. В таких примерах, если такой маршрут есть, определитель 106 глубины воды представляет альтернативный маршрут водителю.
Примерный определитель 106 глубины воды по фиг. 1 классифицирует участки дороги по категориям на основании (a) риска воды на проезжей части дороги и/или (b) прогнозной глубины воды на проезжей части дороги. В некоторых примерах, определитель 106 глубины воды классифицирует отрезки дороги минимальным показателем риска, низким показателем риск, средним показателем риска и высоким показателем риска. Минимальный показатель риска, например, устанавливает, что участок дороги не имеет предыстории стоячей воды. Низкий показатель риска, например, устанавливает, что (a) участок дороги имеет предысторию достаточного водоотвода при условии текущего количества дождевых осадков, и/или (b) количество стоячей воды, о котором было сообщено (например, другими транспортными средствами, метеостанциями, метеорологическим беспилотным летательным аппаратом 114, и т. д.), на участке дороги является меньшим, чем первое пороговое количество накопленной воды (например, шесть дюймов). Средний показатель риска, например, устанавливает, что (a) участок дороги имеет предысторию накопления воды при данном количестве дождевых осадков (например, скорость накопления воды является большей, чем скорость, с которой система водоотвода способна удалять воду), и/или (b) количество стоячей воды, о котором было сообщено, на участке дороги находится между первым пороговым количеством накопленной воды и вторым пороговым количеством накопленной воды (например, двенадцатью дюймами). Высокий показатель риска, например, устанавливает, что (a) участок дороги имеет предысторию подтопления при условии текущего количества дождевых осадков, и/или (b) количество стоячей воды, о котором было сообщено на участке дороги, является большим, чем второе пороговое количество накопленной воды. В некоторых примерах, первое и второе пороговые количества накопленной воды корректируются на основании дорожного просвета и/или разрешенного уровня воды транспортного средства 100. Например, если уровень дорожного просвета транспортного средства имеет значение 8,7 дюймов, первым пороговым значением являются 8,7, а вторым пороговым значением могут быть 14,7 дюймов. Некоторые транспортные средства 100 имеют разрешенные уровни воды, когда планируется, что они должны преодолевать вброд зоны с водой. Например, транспортное средство может иметь разрешенный уровень воды в 27 дюймов.
Для оценки (i) текущей глубины воды под транспортным средством 100, (ii) глубины на текущем маршруте и окружающих маршрутах, (iii) достигла ли текущая глубина воды порогового значения предупреждения (например, второго порогового количества накопленной воды), и (iv) превышает ли глубина воды или ожидается, что превысит предельное значение глубины транспортного средства 100 на маршруте ко времени, когда транспортное средство прибывает туда, определитель 106 глубины воды анализирует данные, принятые с серверов 112, данные, принятые с других транспортных средств (например, через связь между транспортными средствами), данные, принятые с метеорологического беспилотного летательного аппарата, и/или данные, принятые с метеостанций (например, через связь между транспортным средством и инфраструктурой), и т. д. В некоторых примерах, принятые данные включают в себя (a) текущую интенсивность дождевых осадков, (b) прогнозные интенсивности дождевых осадков (например, в пределах пяти минут, в пределах десяти минут, и т. д.), (c) возвышение транспортного средства 100, (d) ретроспективные данные подтопления, (e) ретроспективные данные оставления транспортных средств, (f) данные интенсивности отвода ливневых вод, (g) данные с датчиков из других транспортных средств и/или (h) информацию о текущем маршруте (например, участках дороги, используемых маршрутом), и т. д. Дополнительно, в некоторых примерах, определитель 106 глубины воды анализирует данные с датчиков 118 (например, датчиков присутствия или близости, камер, инфракрасных датчиков, и т. д.) транспортного средства и дорожный просвет и/или разрешенный уровень воды транспортного средства 100. В некоторых примерах, когда определитель 106 глубины воды выявляет глубину воды (например, с помощью датчиков 118 транспортного средства), определитель 106 глубины воды передает глубины воды на другие транспортные средства через бортовую платформу 102 связи.
Определитель 106 глубины воды выдает звуковое, визуальное и/или тактильное предупреждение (например, через информационно-развлекательный головной блок 104), когда транспортное средство 100 попадает на участок дороги с низким, средним или высоким показателем риска. Настойчивость предупреждения основана на уровне показателя риска. Например, высота тона, громкость и/или частота звукового предупреждения могут возрастать по мере того, как возрастает показатель риска.
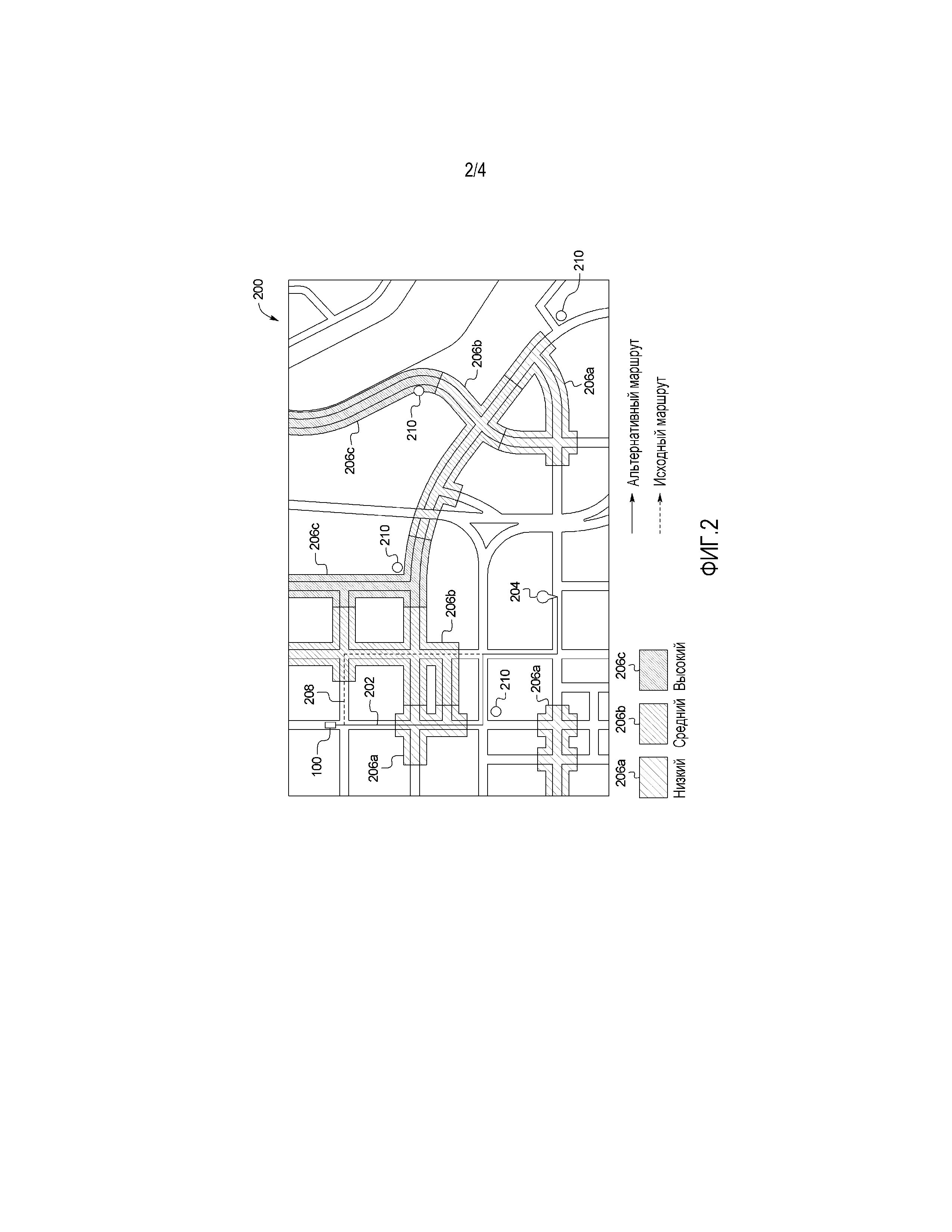
Фиг. 2 изображает примерную карту 200 с показателями риска по глубине воды. Примерная карта 200 может отображаться на устройстве отображения центральной консоли информационно-развлекательного головного блока 104. В проиллюстрированном примере, карта 200 изображает проезжие части дороги в зоне вокруг транспортного средства 100. Дополнительно, карта 200 включает в себя альтернативный маршрут 202. Альтернативный маршрут 202 является маршрутом, выбранным определителем 106 глубины воды, после анализа участков дороги между транспортным средством 100 и пунктом 204 назначения, который минимизирует показатели риска по зонам 206a-206c показателя риска, которые должны проезжаться транспортным средством 100. В некоторых примерах, карта 200 также отображает исходный маршрут 208 (например, маршрут транспортного средства 100 до того, как был выбран альтернативный маршрут 202). В проиллюстрированном примере, карта 200 также отображает местоположения метеостанций 210. Метеостанции 210 включают в себя инфраструктурные узлы, которые широковещательно передают измерения с измерителей глубины воды и/или измерителей дождевых осадков.
Карта 200 включает в себя зоны 206a-206c показателя риска. Зоны 206a-206c показателя риска отражают показатель риска соответствующих участков дороги. В проиллюстрированном примере, зоны 206a-206c показателя риска включают в себя зоны 206a с низким показателем риска, зоны 206b со средним показателем риска и зоны 206c с высоким показателем риска. Зоны 206a-206c показателя риска закодированы цветом и/или снабжены орнаментом для обеспечения визуального индикатора риска. В некоторых примерах, зоны 206a с низким показателем риска окрашены желтым цветом. зоны 206b со средним показателем риска окрашены оранжевым цветом, а зоны 206c с высоким показателем риска окрашены красным цветом. Зоны 206a-206c показателя риска могут быть кодированы цветом и/или снабжены орнаментом любым пригодным образом. Например, карта 200 может включать в себя режимы для содействия не различающим цвета занимающим места людям транспортного средства 100.
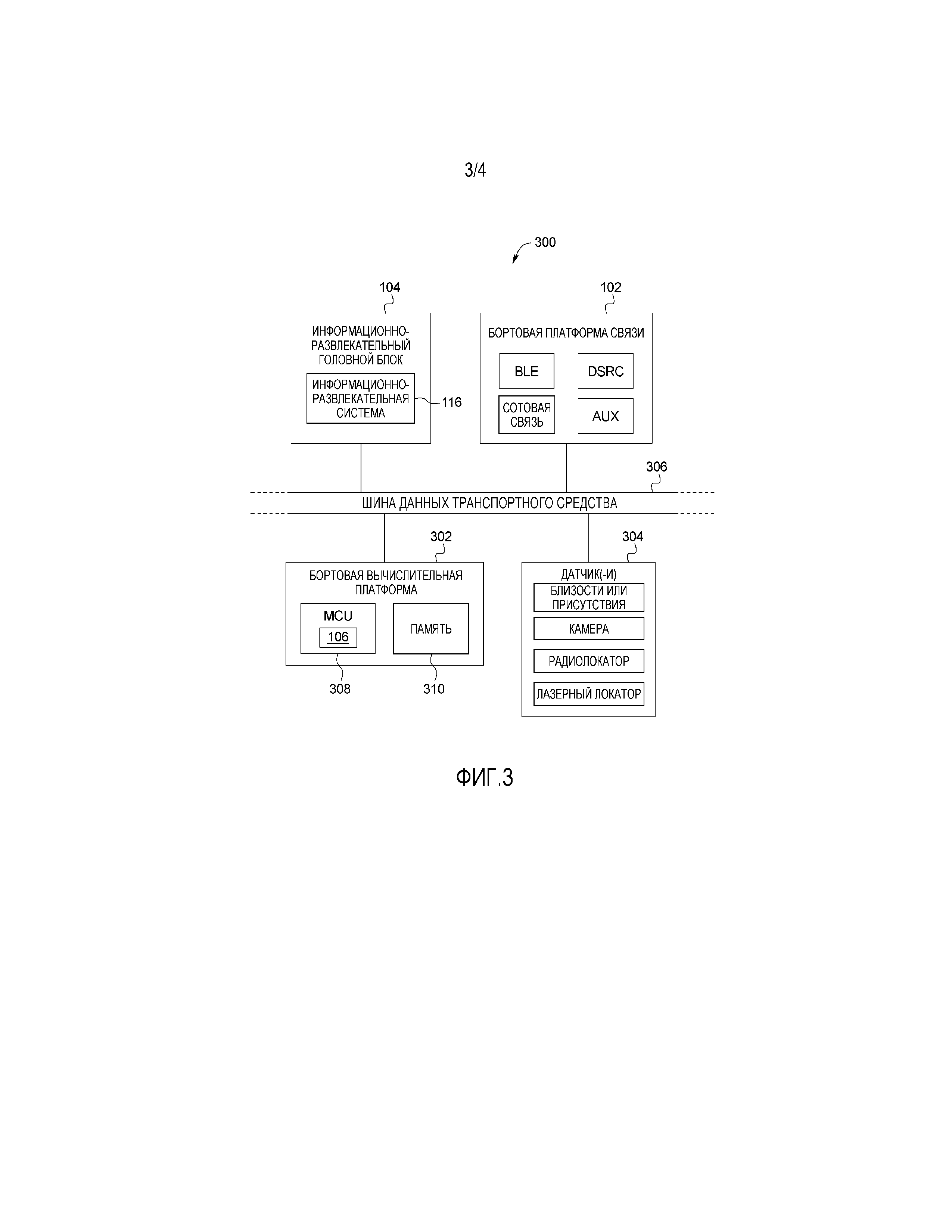
Фиг. 3 - структурная схема электронных компонентов 300 транспортного средства 100 по фиг. 1. В проиллюстрированном примере, электронные компоненты 300 включают в себя бортовую платформу 102 связи, информационно-развлекательный головной блок 104, бортовую вычислительную платформу 302, датчики 304 и шину 306 данных транспортного средства.
Бортовая вычислительная платформа 302 включает в себя процессор или контроллер 308 и память 310. В некоторых примерах, бортовая вычислительная платформа 302 сконструирована, чтобы включать в себя определитель 106 глубины воды. В качестве альтернативы, в некоторых примерах, определитель 106 глубины воды может быть включен в другой электронный блок управления (ECU) со своим собственным процессором 308 и памятью 310. Процессор или контроллер 308 может быть любым пригодным устройством обработки или набором устройств обработки, таких как, но не в качестве ограничения: микропроцессор, основанная на микроконтроллерах платформа, пригодная интегральная схема, одна или более программируемых пользователем вентильных матриц (FPGA) и/или одна или более специализированных интегральных схем (ASIC). Памятью 310 может быть энергозависимая память (например, ОЗУ (оперативное запоминающее устройство, RAM), которое может включать в себя энергонезависимое ОЗУ, магнитное ОЗУ, ферроэлектрическое ОЗУ и любые другие пригодные формы); энергонезависимая память (например, дисковая память, флэш-память (FLASH), СППЗУ (стираемые программируемые постоянные запоминающие устройства, EPROM) ЭСППЗУ (электрически стираемые программируемые постоянные запоминающие устройства, EEPROM), основанная на мемристорах энергонезависимая твердотельная память, и т. д.); немодифицируемая память (например, СППЗУ), постоянное запоминающее устройство, и/или запоминающие устройства большой емкости (например, накопители на жестком диске, твердотельные накопители, и т. д.) В некоторых примерах, память 310 включает в себя многочисленные разновидности памяти, в частности, энергозависимую память и энергонезависимую память.
Память 310 является машинно-читаемыми носителями, на которых могут быть воплощены один или более наборов команд, таких как программное обеспечение для приведения в действие способов по настоящему изобретению. Команды 926 могут воплощать один или более способов или логику, как описанные в материалах настоящей заявки. В конкретном варианте осуществления, команды могут находиться полностью или по меньшей мере частично в пределах любых одной или более из памяти 310, машинно-читаемого носителя и/или в пределах процессора 308 во время выполнения команд.
Термины «постоянный машинно-читаемый носитель» и «машинно-читаемый носитель» включают в себя одиночный носитель или множественные носители, такие как централизованная или распределенная база данных и/или связанные устройства кэш-памяти и серверы, которые хранят один или более наборов команд. Термины «постоянный машинно-читаемый носитель» и «машинно-читаемый носитель» также включают в себя любой материальный носитель, который способен хранить, кодировать или переносить набор команд для выполнения процессором, или который побуждает систему выполнять любой один или более из способов или операций, раскрытых в материалах настоящей заявки. В качестве используемого в материалах настоящей заявки, термин «машинно-читаемый носитель» ясно определен включающим в себя любой тип машинно-читаемого запоминающего устройства и/или запоминающего диска для исключения распространяющихся сигналов.
Датчики 304 могут быть скомпонованы в и вокруг транспортного средства 100 любым пригодным образом. Датчики 304 могут измерять свойства вокруг наружной стороны транспортного средства 100. Дополнительно, некоторые датчики 304 могут быть установлены внутри кабины транспортного средства 100 или в кузове транспортного средства 100 (к примеру, моторном отсеке, нишах для колес, и т. д.) для измерения свойств во внутренней области транспортного средства 100. Например, такие датчики 304 могут включать в себя измерители ускорения, одометры, тахометры, датчики угла продольного наклона и угла рыскания, датчики скорости вращения колес, микрофоны, датчики давления в шинах и биометрические датчики, и т. д. В проиллюстрированном примере, датчики 304 включают в себя датчики близости или присутствия, камеры, радиолокатор и лазерный локатор. Определитель 106 глубины воды использует датчики 304 для выявления воды на проезжей части дороги и/или выявления глубин воды на проезжей части дороги.
Шина 306 данных транспортного средства с возможностью обмена информацией соединяет бортовую платформу 102 связи, информационно-развлекательный головной блок 104, бортовую вычислительную платформу 302 и датчики 304. В некоторых примерах, шина 306 данных транспортного средства включает в себя одну или более шин данных. Шина 306 данных транспортного средства может быть реализована в соответствии с протоколом шины локальной сети контроллеров (CAN), как определено стандартом 11898-1 Международной организации по стандартизации (ISO), протоколом шины транспортировки данных мультимедийных систем (MOST), протоколом шины многофункциональных данных CAN (CAN-FD) (ISO 11898-7) и протоколом шины К-line (ISO 9141 и ISO 14230-1), и/или протоколом шины Ethernet™ IEEE 802.3 (начиная с 2002 года), и т. д.
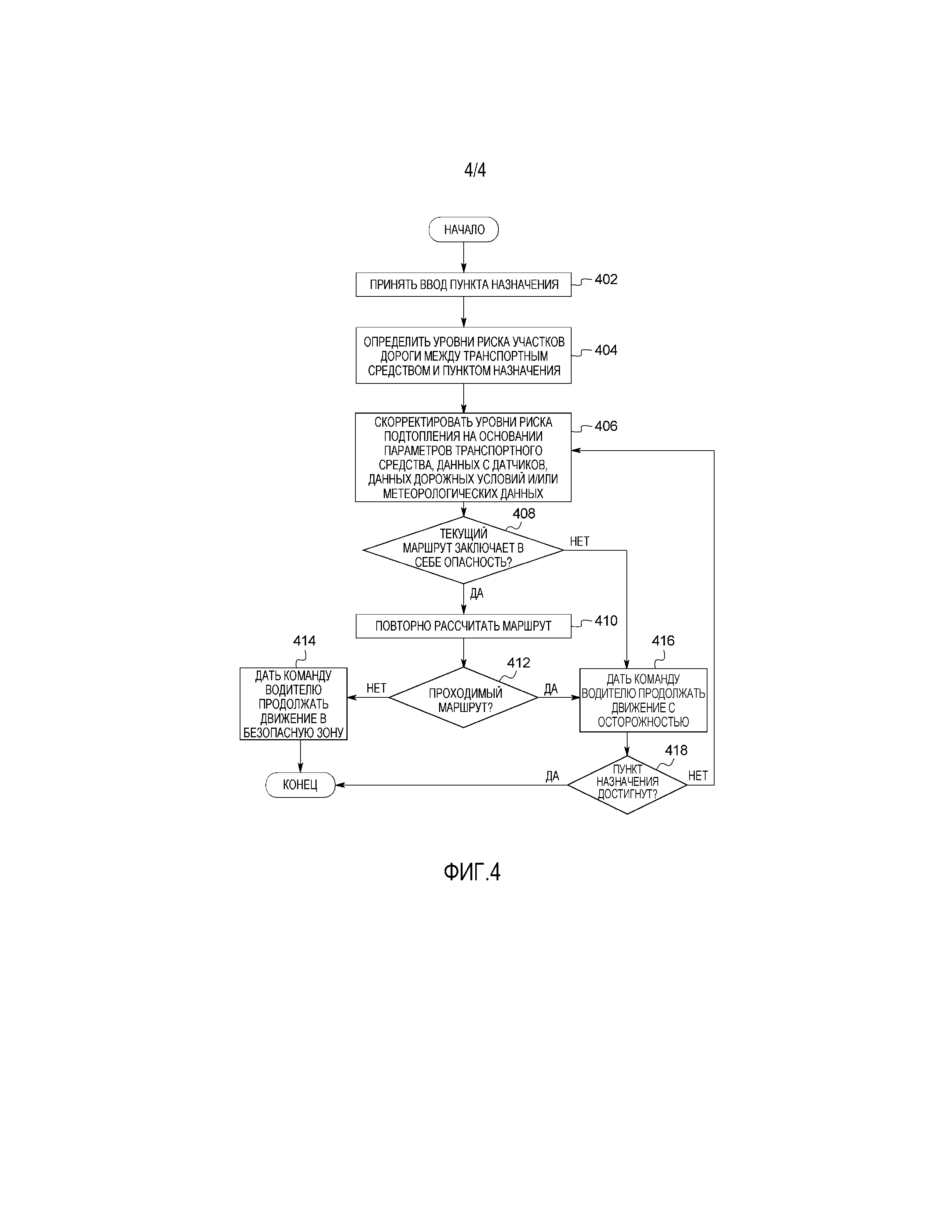
Фиг. 4 - блок-схема последовательности операций способа для планирования и отслеживания маршрута движения транспортного средства с выявлением глубины воды, который может быть реализован электронными компонентами 300 по фиг. 3. В начале, на вершине 402 блок-схемы, определитель 106 глубины воды принимает ввод пункта назначения через информационно-развлекательную систему 116. На вершине 404 блок-схемы, определитель 106 глубины воды определяет местоположения и уровни риска по зонам 206a-206c показателя риска для зоны между текущим местоположением и пунктом назначения, принятым на вершине 402 блок-схемы. В некоторых примерах, определитель 106 глубины воды основывает определение на (a) реальных метеорологических данных (например, текущих дождевых осадках, прогнозных дождевых осадках, ожидаемой скорости накопления, и т. д.), (b) ретроспективных данных подтопления (например, обычно подтапливаемых зон, где как правило покидаются автомобили, ретроспективном накоплении воды), (c) навигационных данных (например, данных участка дороги для области вокруг транспортного средства 100) и/или (d) данных с метеорологического беспилотного летательного аппарата (например, данных накопления воды в реальном времени, данных выявления опасности, и т. д.), и т. д.
На вершине 406 блок-схемы, определитель 106 глубины воды корректирует определения, выполненные на вершине 404 блок-схемы, на основании (a) дорожного просвета и/или разрешенного уровня воды транспортного средства 100 и/или (b) данных дорожных условий, принятых с метеостанции(й) 210. На вершине 408 блок-схемы, определитель 106 глубины воды анализирует зоны 206a-206c показателя риска, связанные с участками дороги текущего маршрута (например, маршрута 208 по фиг. 2). Если участки дороги текущего маршрута заключают в себе опасность, способ продолжается на вершине 410 блок-схемы. Иначе, если участки дороги текущего маршрута не включают в себя опасность, способ продолжается на вершине 416 блок-схемы. В некоторых примерах, определитель 106 глубины воды определяет, что опасность есть, если какие-нибудь участки дороги связаны с зонами 206a с низким показателем риска, зонами 206b со средним показателем риска или зонами 206c с высоким показателем риска. В качестве альтернативы, в некоторых примерах, опасность есть, если какие-нибудь участки дороги связаны с зонами 206b со средним показателем риска или зонами 206c с высоким показателем риска, а не с зонами 206a с низким показателем риска.
На вершине 410 блок-схемы, определитель 106 глубины воды повторно рассчитывает маршрут (например, чтобы становился альтернативным маршрутом 202 по фиг. 2), анализируя участки дороги между текущим местоположением транспортного средства 100 и пунктом назначения. На вершине 412 блок-схемы, определитель 106 глубины воды определяет, есть ли проходимый альтернативный маршрут в пункт назначения. В качестве используемого в материалах настоящей заявки, проходимый маршрут является маршрутом, где нет опасностей. Если проходимого маршрута нет, способ продолжается на вершине 414 блок-схемы. Иначе, если проходимый маршрут есть, способ продолжается на вершине 416 блок-схемы. На вершине 414 блок-схемы, определитель 106 глубины воды дает водителю команду, через информационно-развлекательную систему 116, продолжить движение в безопасную зону или выбрать новый пункт назначения. В некоторых примерах, безопасные зоны обозначены в качестве зон (например, аварийные службы, и т. д.), которые вероятно не будут испытывать подтопление. На вершине 416 блок-схемы, определитель 106 глубины воды дает команду водителю, через информационно-развлекательную систему 116, продолжать движение в пункт назначения с осторожностью. На вершине 418 блок-схемы, определитель 106 глубины воды определяет, находится ли транспортное средство 100 в пункте назначения, принятом на вершине 402 блок-схемы. Если транспортное средство 100 находится в пункте назначения, способ заканчивается. Иначе, если транспортное средство 100 не находится в пункте назначения, способ возвращается на вершину 406 блок-схемы.
Блок-схема последовательности операций способа по фиг. 4 является представляющей машинно-читаемые команды, хранимые в памяти (такой как память 310 по фиг. 3), которые содержат одну или более программ, которые, когда приводятся в исполнение процессором (таким как процессор 308 по фиг. 3), побуждают транспортное средство 100 реализовывать примерный определитель 106 глубины воды по фиг. 1 и 3. Кроме того, хотя примерная программа(ы) описана со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 4, многие другие способы реализации примерного определителя 106 глубины воды могут использоваться в качестве альтернативы. Например, порядок приведения в исполнение вершин блок-схемы может быть изменен, и/или некоторые из описанных вершин блок-схемы могут быть изменены, исключены или объединены.
В этой заявке подразумевается, что использование дизъюнктивных суждений должно включать в себя конъюнктивное суждение. Использование формы единственного числа не подразумевает указание количества объектов во множестве объектов. В частности, подразумевается, что ссылка на объект в единственном числе также должна обозначать один из возможного множества таких объектов. Кроме того, союз «или» может использоваться для выражения признаков, которые присутствуют одновременно, вместо взаимоисключающих альтернатив. Другими словами, союз «или» следует понимать включающим в себя «и/или». Термины «включает в себя», «включающий в себя» и «включают в себя» являются инклюзивными и имеют тот же самый объем, что и «содержит», «содержащий» и «содержат», соответственно.
Описанные выше варианты осуществления и, в частности, любые «предпочтительные» варианты осуществления, являются возможными примерами реализаций и изложены всего лишь для ясного понимания принципов изобретения. Многие варианты и модификации могут быть произведены в отношении описанных выше вариантов(а) осуществления, по существу не отходя от сущности и принципов технологий, описанных в материалах настоящей заявки. Все модификации подразумеваются включенными в материалы настоящей заявки в объеме данного изобретения и защищенными нижеследующей формулой изобретения.
Реферат
Изобретение относится к системам навигации транспортного средства. Транспортное средство содержит память, хранящую команды, и процессор для выполнения команд. Процессор побуждает транспортное средство определять текущую и прогнозную глубину воды для участков дороги на и около текущего маршрута в пункт назначения на основании метеорологических данных и ретроспективных данных подтопления, принятых с внешнего сервера, причем метеорологические данные включают в себя текущие и ожидаемые дождевые осадки, а ретроспективные данные подтопления включают в себя предыдущие измерения глубины воды для участков дороги, связанные с текущими и ожидаемыми дождевыми осадками, и ретроспективные местоположения транспортных средств, покинутых вследствие подтопления, и в ответ на текущую или прогнозную глубину воды на участках дороги текущего маршрута, превышающую первое пороговое значение, определять альтернативный маршрут в пункт назначения. Достигается повышение безопасности транспортного средства. 3 н. и 8 з.п. ф-лы, 4 ил.
Формула
Документы, цитированные в отчёте о поиске
Гибридное транспортное средство, способ управления гибридным транспортным средством и устройство выдачи мощности
Комментарии