Способы и устройства для оповещения об аварии беспилотного летательного аппарата - RU2723236C1
Код документа: RU2723236C1
Чертежи
Описание
Область техники, к которой относится изобретение
Раскрытая здесь технология, в целом, относится к области беспилотных летательных аппаратов и, в частности, к способам оповещения об аварии беспилотного летательного аппарата, к беспилотному летательному аппарату, сетевому узлу, беспилотному летательному аппарату, сетевому объекту, компьютерным программам и компьютерным программным продуктам.
Уровень техники
Беспилотные летательные аппараты (unmanned aerial vehicle, UAV), часто называемые дронами, получают все большее распространение и используются для различных целей. Дроны могут использоваться, например, для аэросъемки, профессиональной аэросъемки, коммерческого кинопроизводства и кинопроизводства игровых фильмов, сбора новостей для журналистики, наблюдения полицейскими службами, операций поиска и спасения, научных исследований, лечения болезней, транспортирования грузов и т. д. Небольшие беспилотные воздушные системы быстро завоевывают большой рынок, содержащий услуги и применения.
С ростом количества используемых беспилотных летательных аппаратов также увеличивается риск несчастных случаев. В дронах могут, например, возникать неисправности и они могут затем создавать угрозу для людей при падении на землю с высокой скоростью.
Раскрытие сущностм изобретения
Задача представленной концепции состоит в решении упомянутой выше проблемы. Конкретная задача заключается в обеспечении эффективного способа предупреждения людей об авариях дронов. Эта и другие задачи решаются способами, устройствами, компьютерными программами и компьютерными программными продуктами, соответствующими приложенным независимым пунктам формулы изобретения, и вариантами осуществления, соответствующими зависимым пунктам формулы изобретения.
Задаче соответствует подход, применяемый способом, выполняемым сетевым узлом для оповещения об аварии беспилотного летательного аппарата. Способ содержит этапы, на которых принимают собщение об аварии от беспилотного летательного аппарата, получают расчетную точку крушения беспилотного летательного аппарата и на основе полученной расчетной точки крушения посылают предупреждающие сигналы устройствам связи, расположенным в определенной зоне.
Способ содержит эффективный путь предупреждения людей об авариях дронов и неминуемых крушениях дронов. Поскольку большая часть населения снабжена, например, смартфонами, то таким способом может быть оповещено много людей.
Задаче соответствует подход, применяемый компьютерной программой для сетевого узла. Компьютерная программа содержит управляющую компьютерную программу, которая, когда работает на схеме процессора сетевого узла, заставляет сетевой узел выполнять упомянутый выше способ.
Задача, соответствующая подходу, решается компьютерным программным продуктом, содержащим компьютерную программу, упомянутую выше, и считываемым компьютером средством, на котором хранится компьютерная программа.
Задача, соответствующая подходу, решается сетевым узлом для оповещения об аварии беспилотного летательного аппарата. Сетевой узел выполнен с возможностью приема сообщения об аварии от беспилотного летательного аппарата, получения расчетной точки крушения беспилотного летательного аппарата и посылки, основыаясь на полученной расчетной точке крушения, предупреждающих сигналов устройствам связи, расположенным внутри определенной зоны.
Задача, соответствующая подходу, решается способом, выполняемым беспилотным летательным аппаратом для оповещения об аварии. Способ содержит идентификацию неисправности беспилотного летательного аппарата и передачу сетевому узлу сообщения об аварии.
Задача, соответствующая подходу, решается компьютерной программой для беспилотного летательного аппарата. Компьютерная программа содержит управляющую компьютерную программу, которая, когда работает на схеме процессора беспилотного летательного аппарата, заставляет беспилотный летательный аппарат выполнять описанный выше способ.
Задача, соответствующая подходу, решается компьютерным программным продуктом, содержащим компьютерную программу, описанную выше, и считываемым компьютером средством, на котором записана компьютерная программа.
Задача, соответствующая подходу, решается беспилотным летательным аппаратом для оповещения об аварии. Беспилотный летательный аппарат выполнен с возможностью идентификации неисправности беспилотного летательного аппарата и передачи сетевому узлу сообщения об аварии.
Задача, соответствующая подходу, решается способом, выполняемым сетевым устройством для оповещения об аварии беспилотного летательного аппарата. Способ содержит этапы, на которых принимают сообщение об аварии от беспилотного летательного аппарата посредством сетевого узла системы беспроводной связи, вычисляют, основываясь на сообщении об аварии, расчетную точку крушения беспилотного летательного аппарата и предоставляют посредством сетевого узла системы беспроводной связи предупреждающие сигналы устройствам связи, располагающимся в определенной области.
Задача, соответствующая подходу, решается компьютерной программой для сетевого объекта, причем компьютерная программа содержит управляющую компьютерную программу, которая, когда работает на схеме процессора сетевого объекта, заставляет сетевой объект выполнять упомянутый выше способ.
Задача, соответствующая подходу, решается компьютерным программным продуктом, содержащим компьютерную программу, упомянутую выше, и считываемое компьютером средство, на котором хранится компьютерная программа.
Задача, соответствующая подходу, решается сетевым объектом для оповещения об аварии беспилотного летательного аппарата. Сетевой объект выполнен с возможностью приема сообщения об аварии от беспилотного летательного аппарата посредством сетевого узла системы беспроводной связи, вычисления, основываясь на сообщении об аварии, расчетной точки крушения беспилотного летательного аппарата и подачи посредством сетевого узла системы беспроводной связи предупреждающих сигналов устройствам связи, расположенным внутри определенной зоны.
Дополнительные признаки и преимущества вариантов осуществления представленной концепции станут понятны после прочтения нижеследующего описания с использованием сопроводительных чертежей.
Краткое описание чертежей
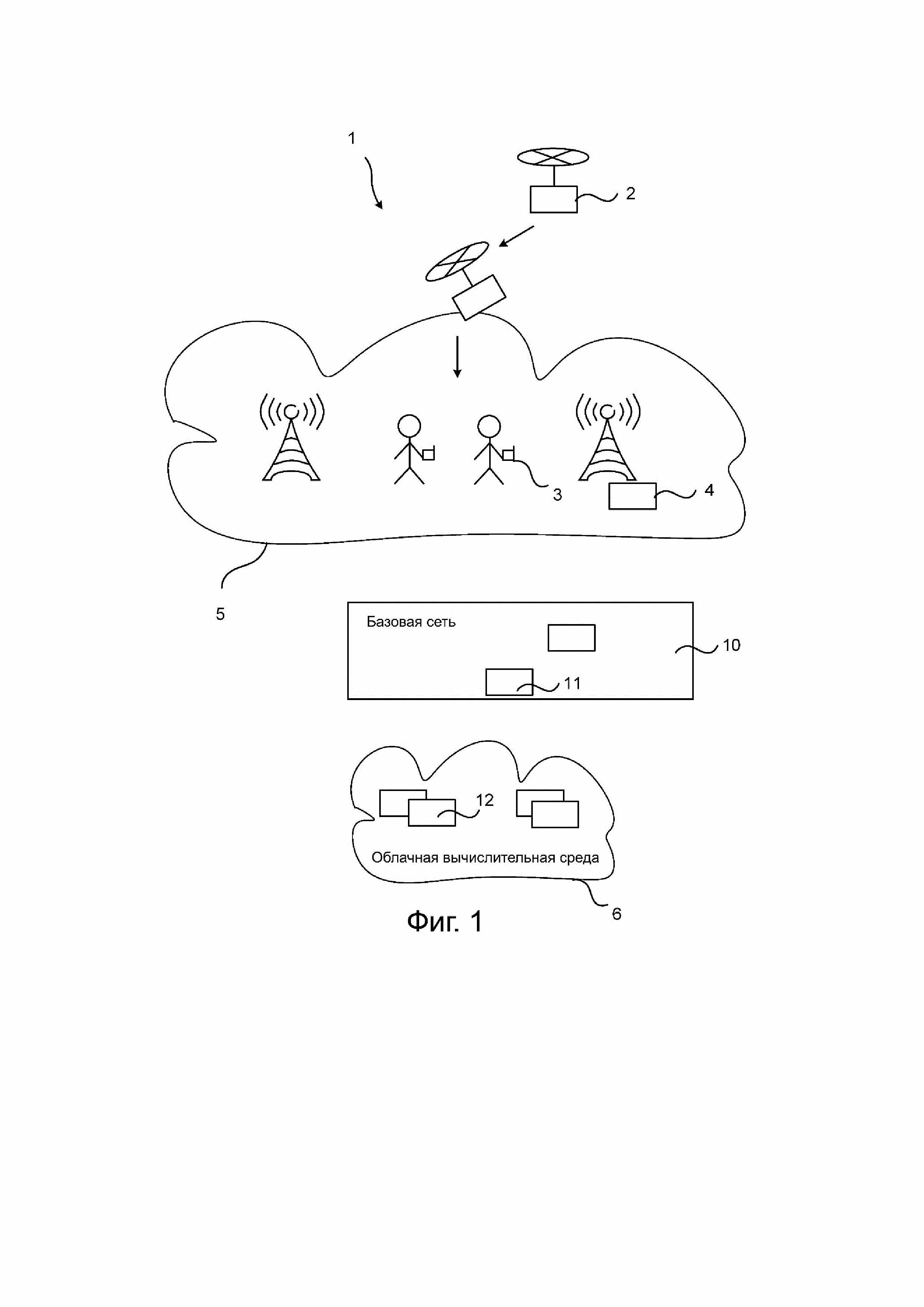
Фиг. 1 – среда, в которой могут быть реализованы варианты осуществления, соответствующие представленной концепции.
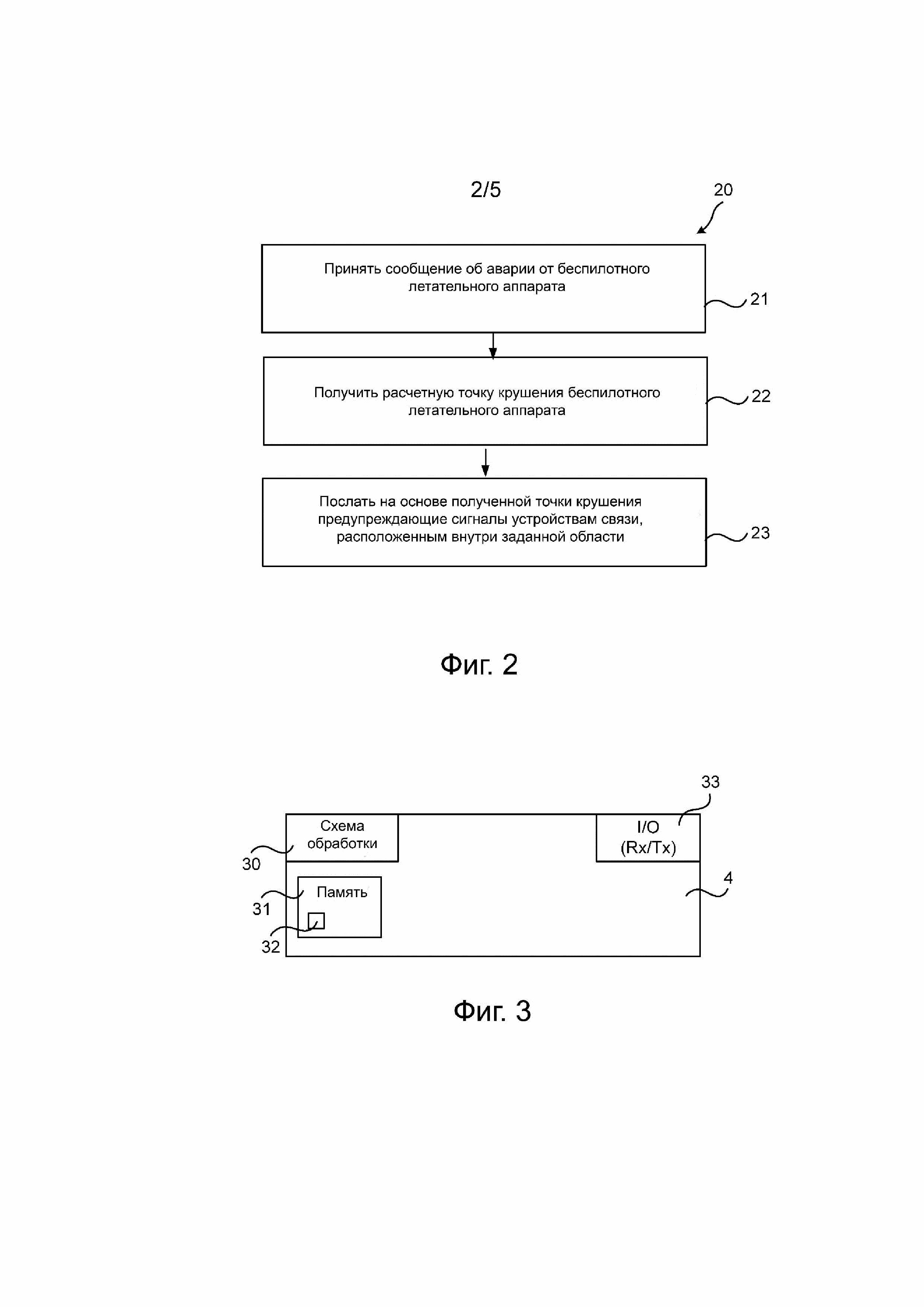
Фиг. 2 – блок-схема последовательности выполнения операций этапов варианта осуществления способа в сетевом узле в соответствии с представленной концепцией.
Фиг. 3 – сетевой узел и средство реализации вариантов осуществления способа в соответствии с представленной концепцией.
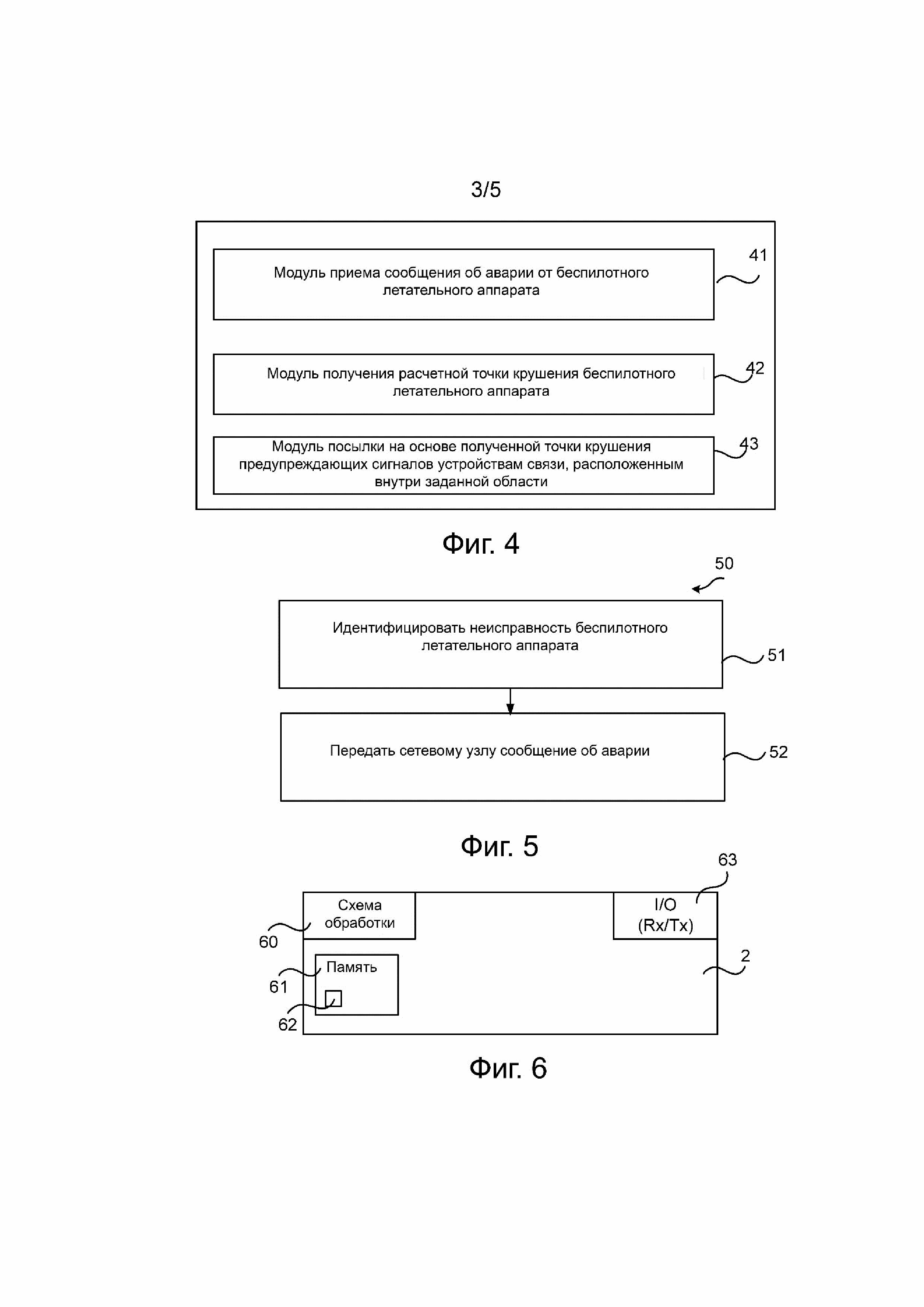
Фиг. 4 – сетевой узел, содержащий функциональные модули/программные модули для реализации вариантов осуществления в соответствии с представленной концепцией.
Фиг. 5 – блок-схема последовательности выполнения операций варианта осуществления способа на беспилотном летательном аппарате в соответствии с представленной концепцией.
Фиг. 6 – беспилотный летательный аппарат и средство реализации вариантов осуществления в соответствии с представленной концепцией.
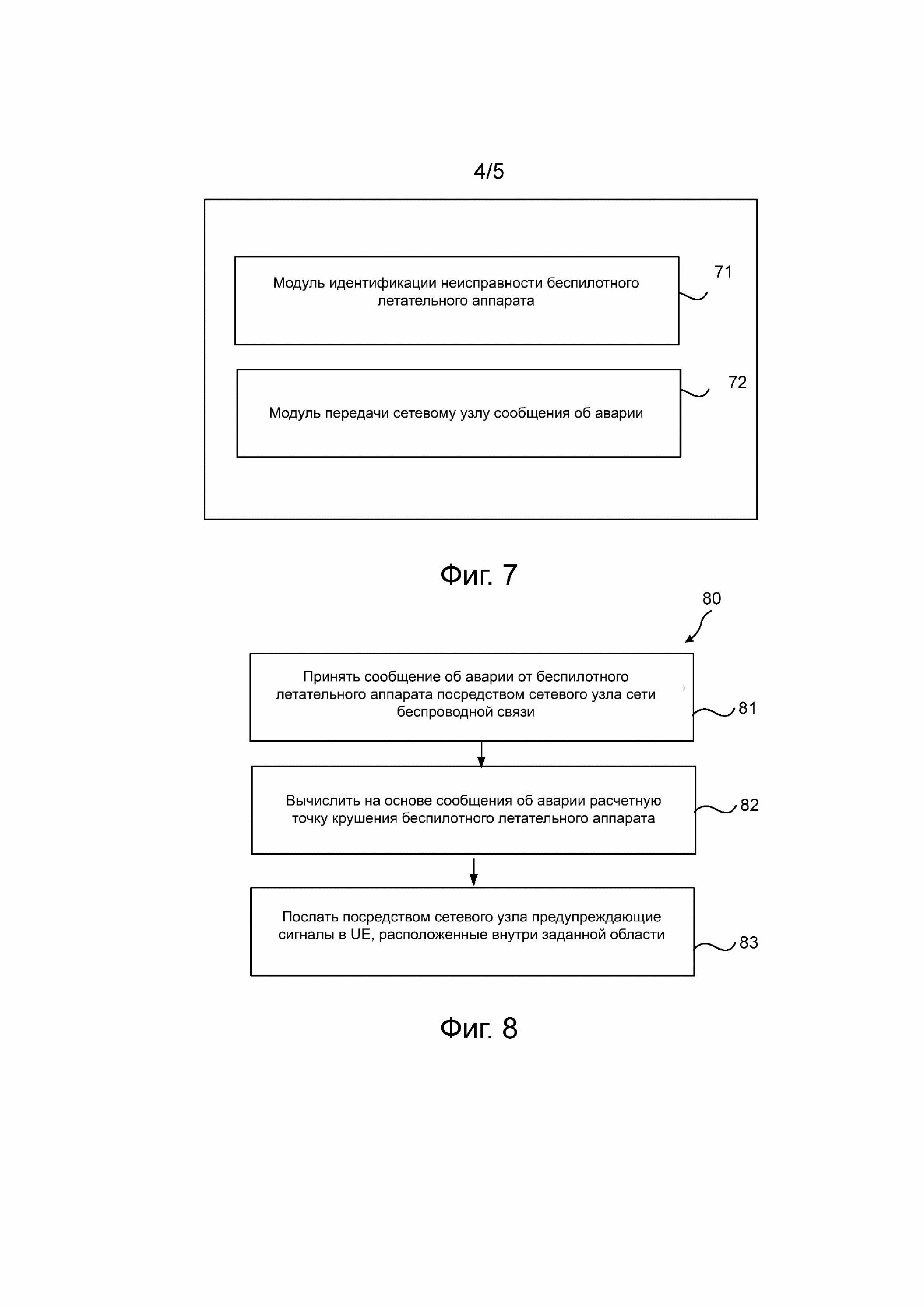
Фиг. 7 – беспилотный летательный аппарат, содержащий функциональные модули/программные модули для реализации вариантов осуществления представленной концепции.
Фиг. 8 – блок-схема последовательности выполнения операций варианта осуществления способа на сетевом объекте в соответствии с представленной концепцией.
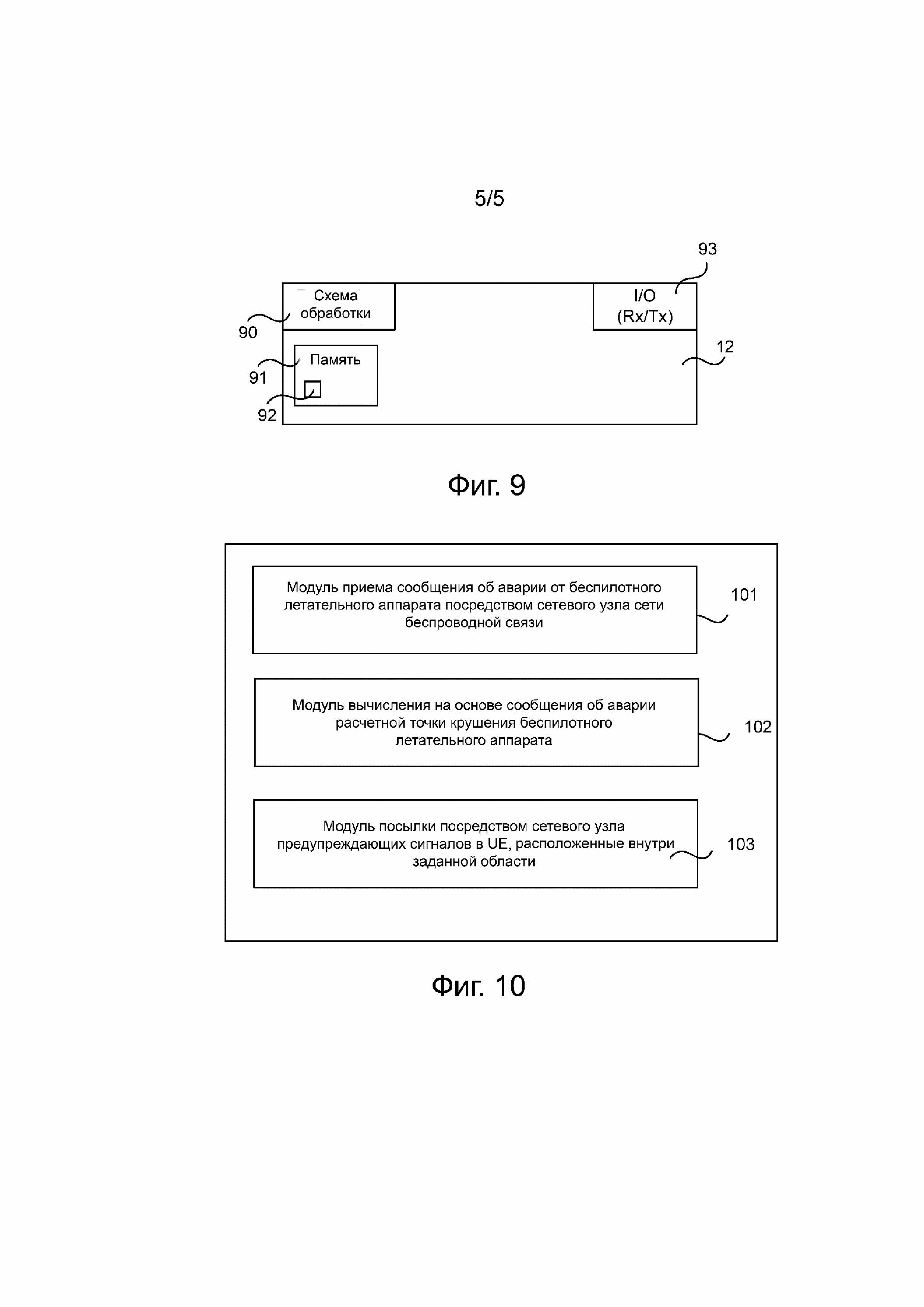
Фиг. 9 – сетевой объект и средство реализации вариантов осуществления в соответствии с представленной концепцией.
Фиг. 10 – сетевой объект, содержащий функциональные модули/программные модули для реализации вариантов осуществления представленной концепции.
Осуществление изобретения
В последующем описании с целью объяснений, но не для создания ограничений, излагаются такие конкретные подробности, как конкретные архитектуры, интерфейсы, технологии и т.д., чтобы обеспечить всестороннее понимание. В других случаях, подробные описания известных устройств, схем и способов не приводятся, чтобы не усложнять описание излишними подробностями. По всему описанию одни и те же ссылочные позиции относятся к одним и тем же или подобным элементам.
Короче говоря, представляются способы и устройства для оповещения людей, находящихся вблизи беспилотного летательного аппарата, испытывающему некий тип неисправности. На сегодня, операторы сети беспроводной связи имеют большое количество пользователей, причем каждый пользователь имеет одно или более устройств, таких как, например, устройства связи (в дальнейшем представляемые в качестве примера как оборудование пользователя (user equipment, UE)). В соответствии с представленной концепцией, предпочтительно обеспечить эффективный механизм предупреждения для быстрого предупреждения большого количества людей.
На фиг. 1 представлена система 1, в которой могут быть реализованы варианты осуществления, соответствующие представленной концепции. В частности, это пример беспилотного летательного аппарата 2, здесь далее также называемого дрон 2, который испытывает аварию и рушится в направлении находящихся внизу людей. Такая авария дрона может нанести травмы находящимся на земле людям.
Дрон 2 может быть снабжен блоком связи, таким, который способен осуществлять связь в системе связи, например, через сотовую сеть радиодоступа, такую как сеть по стандарту долгосрочной эволюции Long Term Evolution (LTE) или 5G. Система 1 связи показана содержащей множество сетевых узлов. Система 1 связи может, например, содержать сеть 2G, 3G, 4G или 5G. Система 1 связи содержит сеть 5 беспроводного доступа, в свою очередь, содержащую множество сетевых узлов 4 (например, узлов радиодоступа). Сеть 1 связи может также содержать базовую сеть, содержащую сетевые узлы 11 (также называемые узлами базовой сети). Система 1 связи может содержать, иметь доступ или взаимно соединяться с другими сетевыми элементами, например, с сетевыми узлами 12 облачной вычислительной среды 6, содержащей множество облачных вычислительных узлов, или с другими сетями пакетной передачи данных, такими как Интернет.
Сетевой узел 4 может обеспечивать и управлять одной или более соответствующими областями покрытия, часто называемыми ячейками C1, C2 и т. п. Дополнительно, сетевой узел 4 может иметь беспроводную связь с дронами 2, имеющими блок связи для приема такой сигнализации и передачи сигнализации в соответствии с существующей технологией доступа. Сетевой узел 4 может реализовывать различные технологии беспроводного доступа, такие как 3G, 4G, LTE или 5G, если упомянуть несколько примеров. Дополнительно, сетевой узел 4 может обозначаться различными способами, в зависимости от стандартов, реализуемых в системе 1 связи. Например, хотя узел доступа, работающий в системе беспроводной связи с устройствами, известен как базовая приемопередающая станция (base transceiver station, BTS) в глобальной системе связи с мобильными объектами (Global System for Mobile Communications, GSM), он также известен как развернутый узел В (evolved Node B или eNB) в системах долговременной эволюции (Long Term Evolution, LTE). Эти сетевые узлы 4 осуществляют связь беспроводным способом с устройствами 3 связи, например, с оборудованием 3 пользователя (user equipment, UE). Сетевой узел 4 может также, в соответствии с вариантами осуществления представленной концепции, осуществлять связь беспроводным способом с дронами 2, оборудованными модулями связи, приспособленными к стандарту беспроводной связи, используемому в системе 1 связи. Связь с дронами может основываться, например, на стандарте LTE (или 5G), на стандарте связи транспортного средства с чем-либо (on Vehicle-to-everything, V2X) или на аналогичном стандарте для связи как с помощью сети, так и напрямую между устройствами (Device-to-Device, (D2D).
Дрон 2, испытывающий какие-либо неисправности (например, в котором было идентифицировано устройство, не выполняющее или действующее не так, как ожидалось, или было идентифицировано низкое напряжение аккумулятора/утечка топлива) может послать сообщение об аварии сетевому узлу 4, например, точке доступа для беспроводной связи, такой как базовая станция, eNB или eNodeB. Дрон 2 может послать сообщение об аварии, чтобы закончить работу с сетевыми узлами 4, которые, в свою очередь, могут послать предупреждающие сигналы на UE 3, расположенные в непосредственной близости от расчетного положения, в котором, как ожидается, дрон 2 должен столкнуться с землей.
Сигнал аварии, переданный от дрона 2 сетевым узлам 4, может содержать различную информацию. Например, аварийное сообщение может содержать такую информацию, как положение дрона, высота над уровнем земли, скорость, ускорение, масса дрона, возможность полета или состояние (например, “свободное падение” или полууправляемое приземление из-за отказа каких-либо двигателей, возможно, компилированное как остающаяся подъемная сила), а также ветровые и погодные условия и т. д. Основываясь на этой информации, сетевые узлы 4 могут рассчитать, когда и где дрон 2 упадет. Предупреждающее сообщение, содержащее все или некоторую часть этой информации, может затем посылаться автоматически всем UE, находящимся вблизи расчетного места крушения. В случае UE 3, ситуация может быть представлена различными способами. Предупреждающее сообщение может, например, появиться как текстовое оповещение, сопровождаемое предупреждающим звуковым сигналом и какой-либо отчетливой индикацией, например, текстом и/или индикацией на карте, когда и где, по расчетам, рухнет дрон.
В зависимости от текущей высоты и состояния дрона 2, когда возникает авария, будет иметься разное время до момента, когда дрон 2 упадет на землю. Это предполагает, что у людей будет больше или меньше времени, чтобы укрыться в безопасном месте до того, как дрон рухнет. Если авария дрона происходит на относительно малой высоте, у пользователей может быть слишком мало времени, чтобы сначала принять предупреждающий сигнал, затем достать свои UE 3 из кармана и отреагировать на предупреждающий сигнал. В некоторых вариантах осуществления, в качестве способа смягчения этой проблемы, используется, например, стандартизация предупреждающего сигнала об авариях дронов, так чтобы немедленно после того, как услышан предупреждающий сигнал от UE 3 (находящегося, например, в сумке или в кармане), пользователь знал, что вблизи находится летящий объект, готовый упасть. В некоторых вариантах осуществления, чтобы оповестить пользователей более эффективно, объекты, находящиеся вблизи, которые также связаны с сетью 1, могут быть выполнены с возможностью издавания звуков и мигания огней. Примерами таких объектов являются столбы освещения, транспортные средства, машины и т. д.
В описании упоминаются только беспилотные летательные аппараты, однако, следует заметить, что представленная концепция может также применяться для пилотируемых летательных аппаратов.
В одном из вариантов осуществления система 1 связи передает пользователям предупреждающие сигналы, когда дрон 2 неожиданно теряет соединение с сетью. Это может случиться, например, если аккумулятор на дроне разрядился.
В одном из вариантов осуществления цветная (например, красная) лампочка на дроне 2 начинает мигать, когда он неисправен и падает. Это особенно полезно в случае, когда снаружи темно и, если такой лампочки нет, будет трудно определить местоположение дрона 2.
В случае системы LTE и если дроном является летящий eNodeB, то тогда eNodeB может использовать блоки системной информации (System-Information Block, SIB), чтобы послать предупреждение соответствующим UE. Если дрон не является eNodeB, то предупреждение должно передаваться через eNodeB к базовой сети, когда принимается решение послать предупреждающий сигнал, используя SIB.
Чтобы предупредить пользователей и других лиц, находящихся поблизости от возможного места, вероятно, неминуемой аварии дрона, дополнительно может быть послан предупреждающий звуковой сигнал непосредственно от падающего дрона 2. То есть, дрон может дополнительно сам посылать предупреждающие сигналы для предупреждения людей.
На фиг. 2 представлена блок-схема последовательности выполнения этапов варианта осуществления способа в сетевом узле в соответствии с представленной концепцией. Способ 20 может выполняться сетевым узлом 4 для оповещения об аварии беспилотного летательного аппарата 2. Сетевой узел 4 может, например, быть узлом радиодоступа (например, eNB).
Способ 20 содержит этап 21, на котором от беспилотного летательного аппарата 2 принимают сообщение об аварии.
Способ 20 содержит этап 22, на котором получают расчетную точку крушения беспилотного летательного аппарата 2. Сетевой узел 4 может получить расчетную точку крушения различными способами; он может, например, вычислить расчетную точку крушения, основываясь на данных, содержащихся в сообшении об аварии. В других вариантах осуществления сетевой узел может получить расчетную точку крушения, посылая сообщение об аварии, например, облачному вычислительному узлу, и получить в ответ расчетную точку крушения.
Способ содержит этап 23, на котором, основываясь на полученной расчетной точке крушения, посылают предупреждающие сигналы устройствам 3 связи, расположенным в определенной зоне. Сетевой узел может посылать предупреждающие сигналы немедленно, если расчетная точка крушения находится вне области(-ей) покрытия, или может запрашивать у одного или более соседних узлов радиодоступа посылку предупреждающих сигналов, если расчетная точка крушения находится в области, охваченной соседним узлом радиодоступа.
Способ 20 обеспечивает эффективный путь предупреждения людей об авариях дронов и неминуемых крушениях дронов. Поскольку большая часть людей носят с собой, например, смартфоны, таким способом может быть оповещено множество людей.
Способ 20 может быть реализован в узле радиодоступа, и в этом случае узел радиодоступа может выполнять все этапы: прием сообщения об аварии, расчет точки крушения и посылка предупреждающих сигналов.
Способ 20 может быть реализован в облачном вычислительном узле (также описанном позже), и в этом случае этот узел принимает сообщение об аварии через узел радиодоступа, который принимает сообщение об аварии от дрона, вычисляет расчетную точку крушения и посылает предупреждающие сигналы через выбранный узел радиодоступа, в частности, узлу радиодоступа, обслуживающему устройства связи, расположенные в области, содержащей расчетную точку крушения. В таких вариантах осуществления узел радиодоступа просто направляет сообщение об аварии облачному вычислительному узлу и узел радиодоступа (который может, но не обязательно, быть тем же самым узлом, который направил сообщение об аварии) принимает команды послать предупреждающие сигналы.
Способ 20 может также быть реализован распределенным способом, в котором участвуют разные узлы. Например, когда способ реализуется в узле радиодоступа, он может получать расчетную точку крушения, посылая сообщение об аварии облачной вычислительной сети, которая вычисляет расчетную точку крушения, и посылает ее на узел радиодоступа. То есть, узел радиодоступа получает расчетную точку крушения, принимая ее от облачного вычислительного узла.
Способ 20 может также содержать этап, на котором определяют, в какую область(-и) должны быть посланы предупреждающие сигналы. Сетевой узел 4 может, основываясь на определенной области(-ях), в свою очередь, определить, какой сетевой узел(-ы) беспроводных систем связи должен посылать предупреждающие сигналы. То есть, нет необходимости сетевому узлу 4, который принял сообщение об аварии, быть сетевым узлом 4, который должен посылать предупреждающие сигналы для предупреждения пользователей, расположенных внутри определенной области. В некоторых вариантах осуществления предупреждающие сигналы посылаются во множестве областей, например, когда существует высокая степень неопределенности точки крушения, например, из-за погодных условий.
В варианте осуществления этап 23 посылки содержит посылку предупреждающих сигналов устройствам 3 связи, расположенным внутри определенной области, окружающей расчетную точку крушения беспилотного летательного аппарата 2. Определенная область может быть областью покрытия (одна или более ячеек), обеспечиваемой сетевым узлом 4 (когда сетевой узел 4 является узлом радиодоступа). В других случаях определенная область может быть областью покрытия (одна или более ячеек), обеспечиваемой сетевым узлом (в частности, узлом радиодоступа), обслуживающим устройства 3 связи, расположенные внутри области, в которой, как ожидают, должно произойти крушение дрона. То есть, первый узел радиодоступа может принять сообщение об аварии дрона, но расчетная точка крушения может находиться в области покрытия, обеспечиваемой вторым узлом радиодоступа. Первый сетевой узел может затем послать предупреждающие сигналы через второй сетевой узел, например, передавая сообщение второму сетевому узлу, запрашивающему у него посылку предупреждающих сигналов.
В некоторых вариантах осуществления способ 20 содержит этап, на котором устанавливают, что соединение с беспилотным летательным аппаратом 2 было потеряно, и в ответ на это посылают предупреждающие сигналы. Дрон 2 может быть выполнен с возможностью регулярной посылки сообщений сетевому узлу 4 и, если одно или более таких сообщений не может быть получено, сетевой узел 4 может предположить, что дрон может терпеть аварию, и послать предупреждающие сигналы.
В различных вариантах осуществления предупреждающие сигналы содержат одно или оба из следующего: звуковые сигналы и текстовое сообщение, информирующие об аварии беспилотного летательного аппарата 2.
В различных вариантах осуществления способ 20 содержит этап, на котором получают информацию о расчетной точке во времени и/или о времени, остающемся до расчетного крушения, и предоставляют информацию устройствам 3 связи, расположенным внутри определенной области.
В различных вариантах осуществления этап 22 получения содержит вычисление сетевым узлом 4 расчетной точки крушения, основываясь на сообщении об аварии.
В различных вариантах осуществления этап 22 получения содержит направление сообщения об аварии сетевому объекту 10, 12 и прием в ответ от сетевого объекта 12 расчетной точки крушения.
В различных вариантах осуществления этап 22 получения содержит прием от беспилотного летательного аппарата 2 расчетной точки крушения. Дрон 2 может сам вычислить расчетную точку крушения и послать ее в сообщении об аварии.
Существуют различные пути, которыми сетевой узел 4 может узнать о расчетной точке крушения беспилотного летательного аппарата 2.
Сетевой узел 4 может быть сетевым узлом, таким как базовая станция, и может быть выполнен с возможностью посылки предупреждающих сигналов устройствам 3 связи, расположенным в его области покрытия или расположенным внутри области покрытия соседних сетевых узлов. В последнем случае, сетевой узел 4 может посылать предупреждающие сигналы через соседние сетевые узлы.
На фиг. 3 схематично показаны сетевой узел и средство для реализации вариантов осуществления способа в соответствии с представленной концепцией. Сетевой узел 4 содержит схему 30 процессора, которая может быть любым сочетанием одного или более из следующих подходящих компонент: центральный процессор (central processing unit, CPU), мультипроцессор, микроконтроллер, цифровой сигнальный процессор (digital signal processor, DSP) и т. п., способных исполнять команды программного обеспечения, хранящиеся в компьютерном программном продукте 31, например, в форме носителя 31 запоминающего устройства. Схема 30 процессора может дополнительно быть представлена как по меньшей мере одна специализированная прикладная интегральная схема (application specific integrated circuit, ASIC) или программируемая логическая интегральная схема (field programmable gate array, FPGA).
Схема 30 процессора выполнена с возможностью принуждения сетевого узла 4 выполнять набор операций или этапов, например, как описано со ссылкой на фиг. 2. Например, носитель 31 запоминающего устройства может хранить набор операций и схема 30 процессора может быть выполнена с возможностью выборки набора операций с носителя 31 запоминающего устройства, чтобы заставить сетевой узел 4 выполнять набор операций. Набор операций может быть представлен как набор исполняемых команд. Схема 30 процессора, таким образом, выполнена с возможностью исполнения раскрытых здесь способов.
Носитель 31 запоминающего устройства может также содержать постоянное запоминающее устройство, которое может быть, например, единым запоминающим устройством или сочетанием магнитной памяти, оптической памяти, твердотельной памяти или даже удаленно расположенной памяти.
Сетевой узел 4 может также содержать устройство 33 ввода/вывода для связи с другими объектами и устройствами. Устройство 33 ввода/вывода может быть интерфейсом и может, например, содержать стек протоколов для связи с другими устройствами или объектами. Устройство 33 ввода/вывода может использоваться для ввода принимаемых данных и для вывода данных и/или приема/передачи беспроводной сигнализации.
Представляется сетевой узел 4 для оповещения об аварии беспилотного летательного аппарата. Сетевой узел 4 выполнен с возможностью:
- приема сообщения об аварии от беспилотного летательного аппарата 2,
- получения расчетной точки крушения беспилотного летательного аппарата 2, и
- посылки, основываясь на полученной расчетной точке крушения, предупреждающих сигналов устройствам 3 связи, расположенным внутри определенной области.
Сетевой узел 4 может быть выполнен с возможностью осуществления перечисленных выше этапов, например, за счет того, что содержит схему 30 процессора и память 31, причем память 31 содержит команды, исполняемые схемой 30 процессора, в результате чего сетевой узел 4 действует с возможностью выполнения этапов. То есть, в варианте осуществления обеспечивается сетевой узел 4. Сетевой узел 4 содержит схему 30 процессора и память 31, причем память содержит команды, исполняемые схемой 30 процессора, в результате чего сетевой узел 4 действует с возможностью: приема сообщения об аварии от беспилотного летательного аппарата, получения расчетной точки крушения беспилотного летательного аппарата и посылки, основываясь на полученной точке крушения, предупреждающих сигналов устройствам связи, расположенным внутри определенной области.
В варианте осуществления сетевой узел 4 выполнен с возможностью посылки предупреждающих сигналов устройствам 3 связи, расположенным внутри определенной области, окружающей расчетную точку крушения беспилотного летательного аппарата 2.
В варианте осуществления сетевой узел 4 выполнен с возможностью установления, что соединение с беспилотным летательным аппаратом 2 потеряно, и посылки в ответ предупреждающих сигналов.
В различных вариантах осуществления предупреждающие сигналы содержат одно или оба из следующего: звуковые сигналы и текстовые сообщения, информарующие об аварии беспилотного летательного аппарата.
В варианте осуществления сетевой узел 4 выполнен с возможностью получения информации о расчетной точки во времени и/или о времени, остающемся до расчетного крушения, и предоставления информации устройствам 3 связи, расположенным в определенной области.
В варианте осуществления сетевой узел 4 выполнен с возможностью получения расчетной точки крушения посредством вычисления в сетевом узле 4, основываясь на сообщении об аварии.
В варианте осуществления сетевой узел 4 выполнен с возможностью получения расчетной точки крушения посредством направления сообщения об аварии сетевому объекту 10, 12 и ее приема в ответ от сетевого объекта 12.
В варианте осуществления сетевой узел 4 выполнен с возможностью получения расчетной точки крушения посредством ее приема от беспилотного летательного аппарата 2.
Представленная концепция также охватывает компьютерную программу 32 для сетевого узла 4 для оповещения об аварии беспилотного летательного аппарата 2. Компьютерная программа 32 содержит управляющую программу, которая, когда выполняется по меньшей мере на одном процессоре сетевого узла 4, заставляет сетевой узел 4 выполнять способ, соответствующий любому из описанных вариантов осуществления.
Представленная концепция также охватывает компьютерные программные продукты 31 для сетевого узла 4 для оповещения об аварии беспилотного летательного аппарата. Компьютерный программный продукт 31 содержит компьютерную программу 32 для реализации вариантов осуществления описанных способов и считываемое компьютером средство, на котором хранится компьютерная программа 32. Компьютерный программный продукт или память, таким образом, содержит команды, исполняемые процессором 30. Такие команды могут содержаться в компьютерной программе или в одном или более программных модулях или функциональных модулях. Компьютерный программный продукт может быть любым сочетанием оперативной памяти (random access memory, RAM) или постоянной памяти (read only memory, ROM), флэш-памяти, памяти на магнитной ленте, компакт-диска (CD)-ROM, цифрового универсального диска (digital versatile disc, DVD), диска Blu-ray и т. д.
На фиг. 4 показан сетевой узел, содержащий функциональные модули/программные модули для реализации вариантов осуществления в соответствии с представленной концепцией. Функциональные модули могут быть реализованы, используя программные команды, такие как компьютерная программа, выполняемая процессором, и/или используя аппаратные средства, такие как специализированные прикладные интегральные схемы (application specific integrated circuit, ASIC), программируемые логические интегральные схемы, дискретные логические компоненты и т. д. и любые их сочетания. Может обеспечиваться схема процессора, которая может быть адаптируемой и, в частности, адаптироваться для выполнения любых этапов способа 20, описанного в различных вариантах осуществления.
Сетевой узел 4 обеспечивается для оповещения об аварии беспилотного летательного аппарата. Сетевой узел 4 содержит первый модуль 41 для приема сообщения об аварии от беспилотного летательного аппарата. Такой первый модуль 41 может, например, содержать приемную схему или устройство ввода.
Сетевой узел 4 содержит второй модуль 42 для получения расчетной точки крушения беспилотного летательного аппарата. Такой второй модуль 42 может, например, содержать схему процессора, приспособленную для вычисления точки крушения.
Сетевой узел 4 содержит третий модуль 43 для посылки, основываясь на полученной расчетной точке крушения, предупреждающих сигналов устройствам 3 связи, расположенным внутри определенной области. Такой третий модуль 43 может, например, содержать схему передачи или устройство вывода.
Заметим, что один или более модулей 41, 42, 43 могут быть заменены блоками.
На фиг. 5 показана блок-схема последовательности выполнения этапов варианта осуществления способа, используемого в беспилотном летательном аппарате в соответствии с представленной концепцией.
Способ 50 выполняется беспилотным летательным аппаратом 2 для оповещения об аварии. Способ содержит этап 51, на котором идентифицируют неисправность в беспилотном летательном аппарате 2. Установление неисправности может содержать, например, обнаружение, что какая-то функция работает не так, как ожидается, или что некоторые измеренные значения отклоняются от справочных значений больше допустимого.
Способ 50 содержит этап 52, на котором сетевому узлу 4, 10, 12 передают сообщение об аварии. Сообщение об аварии может быть включено в формат сообщения и передается посредством сигнализации в соответствии со стандартами беспроводной связи, реализуемыми в узле 5 радиодоступа.
Если беспилотный летательный аппарат 2 имеет неисправности в некоторой точке, то есть, отказывается работать нормально, он может быстро предпринять действие, чтобы предупредить людей, в частности, людей, находящихся внутри области, в которой, как ожидается, должно произойти крушение.
В варианте осуществления способ 50 содержит одно или оба из следующего:: посылка звуковых сигналов и световых сигналов для оповещения о неисправности.
В некоторых вариантах осуществления способ 50 содержит предоставление в отчете об аварии одного или более из следующего: положение беспилотного летательного аппарата 2, высота беспилотного летательного аппарата 2, скорость беспилотного летательного аппарата 2, масса беспилотного летательного аппарата 2, данные, связанные с беспилотным летательным аппаратом 2, данные, связанные с пространством, окружающим беспилотный летательный аппарат 2, температура.
На фиг. 6 схематично показан беспилотный летательный аппарат и средство для реализации вариантов осуществления в соответствии с представленной концепцией. Беспилотный летательный аппарат 2 содержит схему 60 процессора, которая может быть любым сочетанием одного или более из следующих подходящих компонент: центральный процессор (CPU), мультипроцессор, микроконтроллер, цифровой сигнальный процессор (DSP) и т. п., способных выполнять команды программного обеспечения, хранящиеся в компьютерном программном продукте 61, например, в форме носителя 61 запоминающего устройства. Схема 60 процессора может дополнительно быть представлена как специализированная прикладная интегральная схема (ASIC) или программируемая логическая интегральная схема (FPGA).
Схема 60 процессора выполнена с возможностью принуждения беспилотного летательного аппарата 2 выполнять набор операций или этапов, например, как описано в связи с фиг. 5. Например, носитель 61 запоминающего устройства может хранить набор операций и схема 60 процессора может быть выполнена с возможностью выборки этого набора операций из носителя 61 запоминающего устройства, чтобы заставить беспилотный летательный аппарат 2 выполнять набор операций. Набор операций может быть представлен как набор исполняемых команд. Схема 60 процессора, таким образом, выполнена с возможностью выполнения способов так, как здесь раскрыто.
Носитель 61 запоминающего устройства может также содержать постоянное запоминающее устройство, которое, например, может быть любым единым запоминающим устройством или сочетанием магнитной памяти, оптической памяти, твердотельной памяти иди даже установленной на удалении памяти.
Беспилотный летательный аппарат 2 может также содержать устройство 63 ввода/вывода для связи с другими объектами и устройствами. Устройство 63 ввода-вывода может быть интерфейсом и может, например, содержать стек протоколов для связи с другими устройствами или объектами. Устройство 63 ввода/вывода может использоваться для приема вводимых данных и для вывода данных и/или приема/передачи беспроводной сигнализации.
Беспилотный летательный аппарат 2 предназначается для оповещения об аварии. Беспилотный летательный аппарат 2 выполнен с возможностью:
- идентификации неисправности беспилотного летательного аппарата 2, и
- передачи сетевому узлу 4, 10, 12 сообщения об аварии.
Беспилотный летательный аппарат 2 может быть выполнен с возможностью осуществления описанных выше этапов, например, содержать схему 30 процессора и память, причем память 61 содержит команды, исполняемые схемой 60 процессора, в результате чего беспилотный летательный аппарат 2 действует для выполнения этапов. То есть, в варианте осуществления представляется беспилотный летательный аппарат 2. Беспилотный летательный аппарат 2 содержит схему 60 процессора и память 61, причем память содержит команды, выполняемые схемой 60 процессора, в результате чего беспилотный летательный аппарат действует с возможностью идентификации неисправности беспилотного летательного аппарата и передачи сетевому узлу сообщения об аварии.
В варианте осуществления беспилотный летательный аппарат 2 выполнен с возможностью осуществления одного или обоих из следующего: посылка звуковых сигналов и световых сигналов для оповещения о неисправности.
В различных вариантах осуществления беспилотный летательный аппарат 2 выполнен с возможностью предоставления в сообщении об аварии одного или более из следующего: положение беспилотного летательного аппарата 2, высота беспилотного летательного аппарата 2, скорость беспилотного летательного аппарата 2, масса беспилотного летательного аппарата 2, данные, связанные с беспилотным летательным аппаратом 2, данные, связанные с пространством, окружающим беспилотный летательный аппарат 2, температура.
Представленная концепция также охватывает компьютерную программу 62 для беспилотного летательного аппарата 2, чтобы оповещать об аварии. Компьютерная программа 62 содержит компьютерную управляющую программу, которая, когда исполняется по меньшей мере одним процессором беспилотного летательного аппарата 2, принуждает беспилотный летательный аппарат 2 исполнять способ в соответствии с любым из описанных вариантов осуществления.
Представленная концепция также охватывает компьютерные программные продукты 61 для беспилотного летательного аппарата 2 для оповещения об аварии беспилотного летательного аппарата. Компьютерный программный продукт 61 содержит компьютерную программу 62 для реализации вариантов осуществления описанных способов и считываемое компьютером средство, на котором хранится компьютерная программа 62. Компьютерный программный продукт или память, таким образом, содержит команды, исполняемые процессором 60. Такие команды могут содержаться в компьютерной программе или в одном или более программных модулях или функциональных модулях. Компьютерный программный продукт 61 может быть любым сочетанием оперативной памяти (random access memory, RAM) или постоянной памяти (read only memory, ROM), флэш-памяти, памяти на магнитной ленте, компакт-диска (CD)-ROM, цифрового универсального диска (digital versatile disc, DVD), диска Blu-ray и т. д.
На фиг. 7 показан беспилотный летательный аппарат, содержащий функциональные модули/программные модули для реализации вариантов осуществления в соответствии с представленной концепцией. Функциональные модули могут быть реализованы, используя программные команды, такие как компьютерная программа, выполняемая процессором, и/или используя аппаратные средства, такие как специализированные прикладные интегральные схемы (ASIC), программируемые логические интегральные схемы, дискретные логические компоненты и т. д. и любые их сочетания. Может обеспечиваться схема процессора, которая может быть адаптируемой и, в частности, адаптироваться для выполнения любых этапов способа 50, описанного в различных вариантах осуществления.
Беспилотный летательный аппарат обеспечивается для оповещения об аварии. Беспилотный летательный аппарат содержит первый модуль 71 для идентификации неисправности беспилотного летательного аппарата. Такой первый модуль 71 может, например, содержать схему процессора, адаптированную для идентификации такой неисправности.
Беспилотный летательный аппарат содержит второй модуль 72 для передачи сетевому узлу 4, 10, 12 сообщения об аварии. Такой второй модуль 72 может, например, содержать схему передачи или устройство вывода.
Заметим, что один или оба модуля 71, 72 могут быть заменены блоками.
На фиг. 8 показана блок-схема последовательности поэтапного выполнения операций варианта осуществления способа на сетевом объекте в соответствии с настоящей концепцией.
Способ 80 обеспечивается на сетевом объекте для оповещения об аварии беспилотного летательного аппарата 2. Способ 80 содержит этап 81, на котором от беспилотного летательного аппарата 2 через сетевой узел 4 системы беспроводной связи принимают сообщение об аварии. Сетевой объект 12 может быть, например, облачным вычислительным узлом и принимать сообщение об аварии от узла 4 радиодоступа через узлы 11 базовой сети и другие промежуточные узлы.
Способ 80 содержит этап 82, на котором, основываясь на сообщения об аварии вычисляют расчетную точку крушения беспилотного летательного аппарата 2. В зависимости от того, какую информацию содержит сообщение об аварии, точка крушения может быть вычислена различными путями и с разной точностью. Если сообщение об аварии содержит всего несколько данных, например, положение дрона 2 и тип дрона, сетевой объект 12 может получить дополнительную информацию от других сетевых объектов, например, о погодных условиях (ветер и прочее) в полученном месте и, таким образом, улучшить оценку точки крушения по сравнению с вычислением точки крушения, например, просто по положению и типу дрона. Вычисление может также содержать определение, в какую область должны быть посланы предупреждающие сигналы. Сетевой объект 12 может, основываясь на определенной области, в свою очередь, определить, какие сетевые узлы систем беспроводной связи должны посылать предупреждающие сигналы. В других вариантах осуществления предупреждающие сигналы посылаются во многочисленные области, например, когда существует высокая степень неопределенности для точки крушения, например, из-за погодных условий.
Способ 80 содержит этап 83, на котором посредством сетевого узла 4 системы беспроводной связи предоставляют предупреждающие сигналы устройствам 3 связи, расположенным внутри определенной области. Предупреждающие сигналы могут посылаться способом, соответствующим приему сообщения об аварии. То есть, если сетевой объект 12 является облачным вычислительным узлом, он может посылать предупреждающие сигналы узлу 4 радиодоступа или запрашивать передачу предупреждающих сигналов узлу 4 радиодоступа через узлы 11 базовой сети и другие промежуточные узлы.
В различных вариантах осуществления сообщение об аварии содержит одно или более из следующего: положение беспилотного летательного аппарата 2, высота беспилотного летательного аппарата 2, скорость беспилотного летательного аппарата 2, масса беспилотного летательного аппарата 2, данные, связанные с беспилотным летательным аппаратом 2, данные, связанные с пространством, окружающим беспилотный летательный аппарат 2, температура, и вычисление на этапе 82 содержит вычисление расчетной точки крушения, основываясь на одном или более из перечисленного.
На фиг. 9 схематично показан сетевой объект 12 и средство осуществления вариантов осуществления в соответствии с предложенной концепцией. Сетевой объект 12 содержит схему 90 процессора, которая может быть любым сочетанием одного или более из следующих подходящих компонент: центральный процессор (CPU), мультипроцессор, микроконтроллер, цифровой сигнальный процессор (DSP) и т. д., способных выполнять команды программного обеспечения, хранящиеся в компьютерном программном продукте 91, например, в форме носителя 91 запоминающего устройства. Схема 90 процессора может дополнительно предоставляться в качестве по меньшей мере одной прикладной специализированной интегральной схемы (ASIC) или программируемой логической интегральной схемы (FPGA).
Схема 90 процессора выполнена с возможностью принуждения сетевого объекта 12 выполнять набор операций или этапов, например, как описано со ссылкой на фиг. 8. Например, носитель 91 запоминающего устройства может хранить набор операций и схема 90 процессора может быть выполнена с возможностью выборки набора операций с носителя 91 запоминающего устройства, чтобы заставить сетевой объект 12 выполнять набор операций. Набор операций может быть представлен как набор исполняемых команд. Схема 90 процессора, таким образом, выполнена с возможностью исполнения раскрытых здесь способов.
Носитель 91 запоминающего устройства может также содержать постоянное запоминающее устройство, котором может, например, быть любым единым запоминающим устройством или сочетанием магнитной памяти, оптической памяти, твердотельной памяти или даже расположенной на удалении памяти.
Сетевой объект 12 может также содержать устройство 93 ввода/вывода для связи с другими объектами и устройствами. Устройство 93 ввода/вывода может быть интерфейсом и может, например, содержать стек протоколов для связи с устройствами или объектами. Устройство 93 ввода/вывода может использоваться для приема вводимых данных и для вывода данных.
Сетевой объект 12 обеспечивается для оповещения об аварии беспилотного летательного аппарата 2. Сетевой объект 12 выполнен с возможностью:
- приема сообщения об аварии от беспилотного летательного аппарата 2 через сетевой узел 4 системы беспроводной связи,
- вычисления, основываясь на сообщении об аварии, расчетной точки крушения беспилотного летательного аппарата 2, и
- предоставления посредством сетевого узла 4 системы беспроводной связи предупреждающих сигналов устройствам 3 связи, расположенным внутри определенной области.
Сетевой объект 12 может быть выполнен с возможностью осуществления перечисленных выше этапов, например, содержащимися в нем схемой 90 процессора и памятью 91, причем память 91 содержит команды, исполняемые схемой 90 процессора, в результате чего сетевой объект действует с возможностью выполнения этапов. То есть, в варианте осуществления обеспечивается сетевой объект 12. Сетевой объект 12 содержит схему 90 процессора и память 91, причем память 91 содержит команды, исполняемые схемой 90 процессора, в результате чего сетевой объект действует с возможностью: приема сообщения об аварии от беспилотного летательного аппарата 2 посредством сетевого узла 4 системы беспроводной связи; вычисления, основываясь на сообщении об аварии, расчетной точки крушения беспилотного летательного аппарата 2, и предоставление посредством сетевого узла 4 системы беспроводной связи предупреждающих сигналов устройствам 3 связи, расположенным внутри определенной области.
В различных вариантах осуществления сообщение об аварии содержит одно или более из следующего: положение беспилотного летательного аппарата 2, высота беспилотного летательного аппарата 2, скорость беспилотного летательного аппарата 2, масса беспилотного летательного аппарата 2, данные, связанные с беспилотным летательным аппаратом 2, данные, связанные с пространством, окружающим беспилотный летательный аппарат 2, температура, и выполняется, вычисляя расчетную точку крушения, основываясь на одном или более из вышеперечисленного.
На фиг. 10 показан сетевой объект, содержащий функциональные модули/программные модули для реализации вариантов осуществления, соответствующих представленной концепции. Функциональные модули могут быть реализованы, используя команды программного обеспечения, так чтобы компьютерная программа выполнялась процессором и/или используя аппаратное обеспечение, такое как прикладные специализированные интегральные схемы (ASIC), программируемые логические интегральные схемы и т. д. и любое их сочетание. Может быть представлена схема процессора, адаптируемая для выполнения любых этапов способа 50, который был описан в различных вариантах осуществления.
Сетевой объект обеспечивается для оповещения об аварии беспилотного летательного аппарата. Сетевой объект содержит первый модуль 101 для приема сообщения об аварии от беспилотного летательного аппарата 2 посредством сетевого узла 4 системы беспроводной связи. Такой первый модуль может, например, содержать приемную схему или устройство ввода.
Сетевой объект содержит второй модуль 102 для вычисления на основе сообщения об аварии расчетной точки крушения беспилотного летательного аппарата 2. Такой второй модуль 102 может, например, содержать схему процессора, выполненную с возможностью вычисления расчетной точки крушения, основываясь на сообщении об аварии.
Сетевой объект содержит третий модуль 103 для предоставления посредством сетевого узла системы беспроводной связи предупреждающих сигналов сетевым устройствам, расположенным внутри определенной области. Такой третий модуль может, например, содержать приемную схему или устройство ввода.
Заметим, что один или более модулей 101, 102, 103 могут заменяться блоками.
Здесь изобретение было описано, главным образом, со ссылкой на несколько вариантов осуществления. Однако, как должно быть понятно специалистам в данной области техники, варианты осуществления, отличные от раскрытых здесь конкретных вариантов осуществления, также возможны в рамках объема защиты изобретения, которое описывается приложенной формулой изобретения.
Реферат
Предложен способ, выполняемый сетевым узлом, для оповещения об аварии беспилотного летательного аппарата. Способ содержит этап, на котором принимают сообщение об аварии от беспилотного летательного аппарата, этап, на котором получают расчетную точку крушения для беспилотного летательного аппарата, и этап, на котором, на основе полученной расчетной точки крушения, посылают предупреждающие сигналы устройствам связи, расположенным внутри заданной области. Заявленное изоберетение обеспечивает возможность своевременного информирования присутствующих в области крушения людей о возможном крушении беспилотного аппарата. 6 н. и 14 з.п. ф-лы, 10 ил.
Комментарии