Датчик с подвижным чувствительным элементом, работающим в смешанном вибрирующем и маятниковом режиме, и способы управления таким датчиком - RU2632264C1
Код документа: RU2632264C1
Чертежи
Описание
Настоящее изобретение относится к датчику, используемому для обнаружения ускорения, давления или, в целом, любой физической величины, изменение которой может привести к перемещению подвижного тела относительно корпуса. В частности, изобретение находит свое применение для инерциального датчика ускорения и, в частности, для датчика микроэлектромеханической системы (MEMS).
Датчик ускорения с вибрирующим резонатором обычно содержит сейсмическое тело (или чувствительную массу), соединенное с опорой через вибрирующий элемент, как правило, в виде стержня, расположенного вдоль чувствительной оси датчика. Датчик содержит преобразователи для сообщения стержню колебаний на резонансной частоте стержня и для обнаружения изменений частоты колебаний стержня. Под действием ускорения, сообщаемого опоре, сейсмическое тело действует на стержень осевой силой сжатия или растяжения: в результате происходит изменение жесткости стержня и, следовательно, изменение его резонансной частоты.
Таким образом, измерение ускорения определяют на основании слабого изменения собственной частоты стержня, что приводит к относительно большой погрешности измерения. Действительно, под действием ускорения на резонатор действует сила, которая изменяет его резонансную частоту: результирующая деформация является относительно слабой и уподобляется паразитным деформациям, порождаемым изменениями температуры или ослаблением напряжений в соединениях.
Для устранения этой погрешности и других нежелательных эффектов общего порядка (нелинейность, температурная чувствительность...) измерения производят дифференциально, заменив единственный стержень двумя стержнями в виде камертона, подвергающимися воздействию напряжений с противоположными знаками со стороны либо сейсмического тела, общего для обоих стержней, либо двух сейсмических тел, каждое из которых связано с одним из стержней.
Для ограничения этой погрешности измерения было предложено также применять электростатическую жесткость параллельно с механической жесткостью таким образом, чтобы под действием ускорения сейсмическое тело изменяло электростатическую жесткость.
В датчике, выполненном по этому принципу, электростатическую жесткость получают при помощи гребеночных электродов, связанных с каждым из вибрирующих стержней камертона таким образом, чтобы под действием ускорения чувствительное тело изменяло рабочий зазор между гребеночными электродами и, следовательно, электростатическую жесткость, создаваемую указанными электродами. Изменение жесткости приводит к изменению частоты колебаний стержней. Стержни имеют разные частоты колебаний, и разность между двумя частотами и есть измерение ускорения.
При этом увеличение амплитуды изменений обеспечивает уменьшение погрешности измерения.
Настоящее изобретение призвано предложить средство, позволяющее улучшить характеристики датчиков.
Для этого в соответствии с изобретением предложен датчик, содержащий: корпус; первое тело, связанное с корпусом с возможностью перемещения вдоль чувствительной оси при помощи первых средств подвески, образующих плоскость подвески; два резонатора, которые расположены симметрично относительно первого тела вдоль чувствительной оси и каждый из которых содержит пару вторых тел, каждое из которых связано с корпусом при помощи вторых средств подвески с возможностью перемещения вдоль оси вибрации, по существу перпендикулярной к чувствительной оси, и друг с другом при помощи третьих средств подвески; преобразователи, связанные с блоком управления для обнаружения положения первого тела относительно корпуса, сообщения колебаний вторым телам вдоль оси вибрации и обнаружения частоты колебаний вторых тел; и средства поверхностной электростатической связи, связывающие каждое второе тело с первым телом таким образом, чтобы перемещение первого тела относительно корпуса вдоль чувствительной оси приводило к усилению электростатической связи для одной из пар вторых тел и к ослаблению электростатической связи для другой из пар вторых тел.
Таким образом, эти резонаторы имеют относительно большие модальную массу и добротность и относительно низкую резонансную частоту. Когда первое тело перемещается в результате внешнего воздействия, оно приводит к усилению электростатической жесткости одного из резонаторов и к ослаблению электростатической жесткости другого из резонаторов и, тем самым, к повышению резонансной частоты одного из резонаторов и к понижению резонансной частоты другого из резонаторов. Кроме того, возможность изменения электростатической жесткости за счет перемещения делает датчик менее чувствительным к температуре или к ослаблению напряжений соединения, чем если бы это изменение было связано с приложением силы. Выполнение датчика с единственным первым телом, перемещение которого приводит к изменению частоты колебаний резонаторов, позволяет иметь единственный вход и одновременно относительно большую чувствительную массу для каждого из двух резонаторов при таком же габарите. Это выполнение позволяет также получить средства поверхностной электростатической связи, то есть перемещение первого тела будет приводить к изменению поверхности, порождающему изменение электростатической связи, причем это изменение является более линейным для первого порядка, чем изменение рабочего зазора, и, следовательно, его легче использовать. Измерение перемещения первого тела отображает также внешнее воздействие. Заявленный датчик имеет таким образом маятниковый режим работы и вибрирующий режим работы, что обеспечивает, в частности, избыточность измерения. Заявленный датчик обладает таким образом дополнительной функциональностью, обеспечиваемой первым телом в комбинации с преобразователями, которые обеспечивают маятниковый режим работы в открытом контуре, позволяющий получать измерения и улучшить характеристики датчика.
Объектом изобретения является также первый способ управления таким датчиком. Этот способ содержит этап обнаружения перемещения первого тела для определения первого значения измерения и этап обнаружения изменения частоты резонаторов для определения второго значения измерения.
Таким образом, получают два значения при помощи маятникового режима работы для первого и вибрирующего режима работы для второго. Однако эти два режима работы не являются чувствительными к одним и тем же помехам, поэтому приоритет можно отдавать одному или другому режиму работы в зависимости от внешних условий.
Согласно базовому варианту использования этих измеряемых значений,способ содержит этап, на котором в качестве конечного значения измерения берут среднее из первого значения измерения и второго значения измерения.
Объектом изобретения является также второй способ управления датчиком. Этот способ содержит этап, на котором первому телу сообщают заранее определенное движение, и этап, на которомм производят обработку сигнала, поступающего от преобразователей резонаторов, для определения значения измерения.
Таким образом, можно осуществлять калибровку и/или тестирование датчика.
Другие признаки и преимущества изобретения будут более очевидны из нижеследующего описания неограничительных конкретных вариантов выполнения изобретения.
Это описание представлено со ссылками на прилагаемые чертежи, на которых:
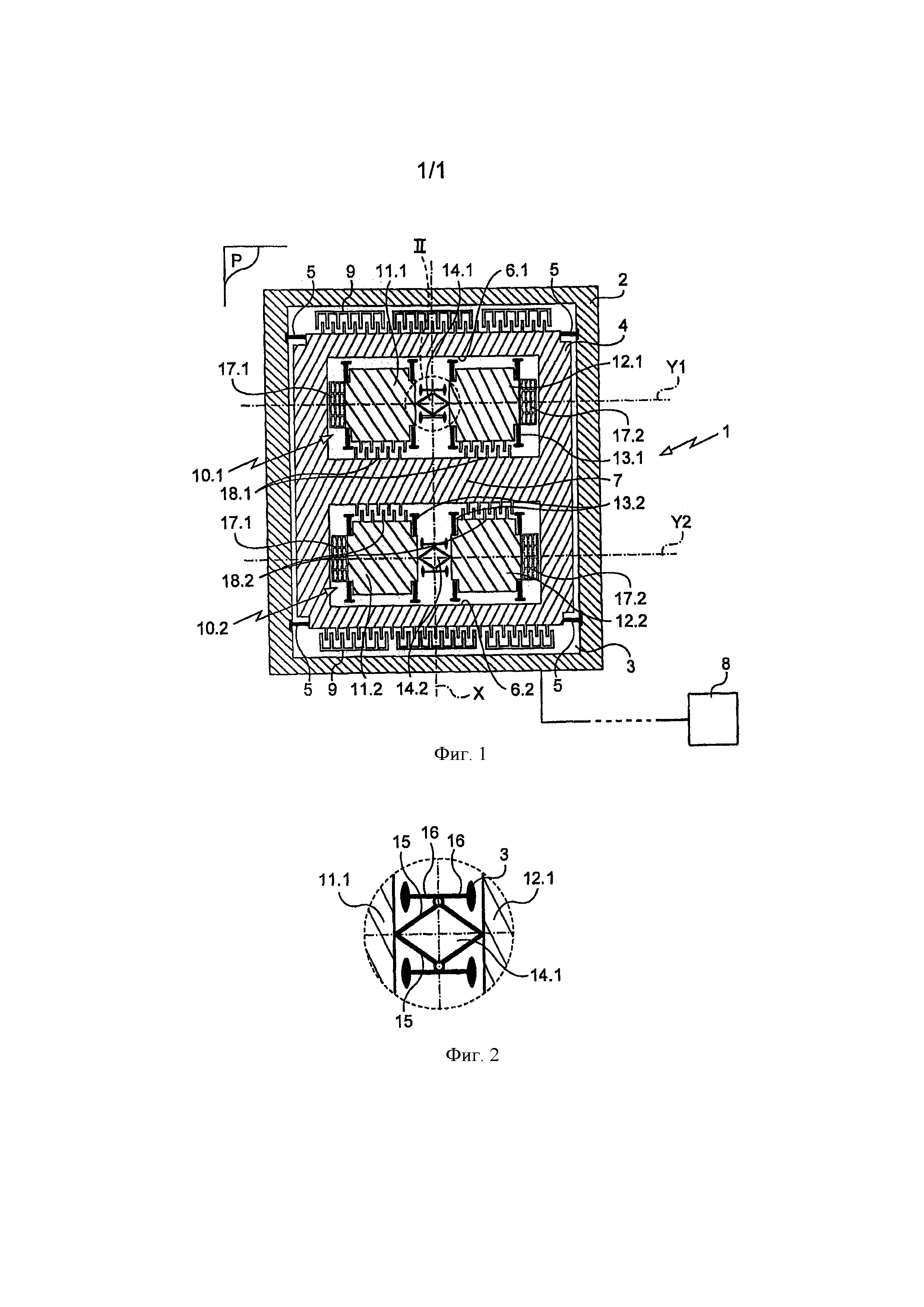
фиг. 1 - схематичный вид сверху датчика в соответствии с изобретением;
фиг. 2 - увеличенный детальный вид зоны II, показанной на фиг. 1.
Изобретение описано в связи с измерением ускорения. Разумеется, изобретение не ограничивается этим применением.
В данном случае заявленный датчик является датчиком типа MEMS и изготовлен посредством травления пластин ("wafers"), содержащих полупроводниковый слой и электропроводящий слой, разделенных электроизоляционным слоем (пластины называются КНД (кремний на диэлектрике). Этот вариант выполнения сам по себе известен.
Заявленный датчик содержит корпус под общим обозначением 1. Корпус 1 содержит боковую стенку 2 в виде прямоугольной рамки, расположенной над дном 3.
Первое тело 4, которое в данном случае является так называемым сейсмическим телом, установлено на корпусе при помощи первых средств 5 подвески, связывающих тело 4 с боковой стенкой 2 корпуса 1. Средства 5 подвески образуют плоскость P подвески и выполнены таким образом, чтобы тело 4 было подвижным вдоль чувствительной оси X, находящейся в плоскости P подвески.
Тело 4 имеет вид прямоугольной пластины, в которой выполнены две полости 6.1, 6.2 прямоугольной формы, выровненные относительно друг друга вдоль чувствительной оси X и разделенные участком 7.
Два резонатора, обозначенные общими позициями 10.1, 10.2, расположены, каждый, в одной из полостей 6.1, 6.2 и, следовательно, симметрично относительно сейсмического тела 4 вдоль чувствительной оси X.
Каждый резонатор 10.1, 10.2 содержит пару вторых тел 11.1, 12.1, 11.2, 12.2, каждое из которых связано с дном 3 корпуса 1 при помощи вторых средств 13.1, 13.2 подвески. Вторые средства 13.1, 13.2 подвески выполнены таким образом, чтобы каждое из тел 11.1, 12.1, 11.2, 12.2 могло вибрировать вдоль оси Y.1, Y.2 вибрации, по существу перпендикулярной к чувствительной оси X. Тела 11.1, 12.1 связаны между собой при помощи третьих средств 14.1 подвески. Тела 11.2, 12.2 связаны между собой при помощи третьих средств 14.2 подвески. Тела и средства подвески выполнены таким образом, что тело 4 и средства 5 подвески имеют собственную частоту порядка от 1 кГц до 3 кГц, и резонаторы 10.1 и 10.2 имеют более высокую собственную частоту, в данном случае составляющую примерно от 10 кГц до 20 кГц.
Средства подвески образованы пластинками, упругодеформирующимися параллельно плоскости P подвески, но имеющими повышенную жесткость вдоль оси, нормальной к плоскости P подвески, чтобы исключить степени свободы тел за пределами плоскости P подвески. Третьи средства 14.1, 14.2 подвески содержат упругодеформирующиеся пластинки 15, расположенные в виде ромба, первая диагональ которого параллельна оси Y вибрации и проходит между первыми вершинами, связанными с телами 11.1, 12.1, и вторая диагональ которого параллельна чувствительной оси X и проходит между вторыми вершинами, связанными с дном 3 корпуса 1 через пластинки 16, образующие тяги, таким образом, чтобы вторые вершины были подвижными только вдоль чувствительной оси X.
Датчик содержит преобразователи, связанные с блоком 8 управления.
Первые преобразователи 9 установлены между боковой стенкой 2 корпуса 1 и первым телом 4 и выполнены, как известно, с возможностью обнаружения положения первого тела 4 относительно корпуса 1 и с возможностью перемещения первого тела 4 относительно корпуса 1. Этими преобразователями можно управлять таким образом, чтобы они поочередно выполняли эти две функции, или можно предусмотреть один преобразователь для функции перемещения и один преобразователь для функции обнаружения.
Вторые преобразователи 17.1, 17.2 установлены между каждым из вторых тел 11.1, 12.1, 11.2, 12.2 и дном 3 корпуса 1 и выполнены, как известно, с возможностью сообщения вибрации вторым телам 11.1, 12.1, 11.2, 12.2 вдоль оси Y.1, Y.2 вибрации и обнаружения частоты колебаний вторых тел 11.1, 12.1, 11.2, 12.2. Этими преобразователями можно управлять таким образом, чтобы они поочередно выполняли эти две функции, или можно предусмотреть один преобразователь для функции сообщения колебаний и один преобразователь для функции обнаружения.
Преобразователи выполнены в виде гребенчатых электродов.
Кроме того, датчик содержит средства поверхностной электростатической связи, связывающие каждое второе тело 11.1, 12.1, 11.2, 12.2 с первым телом 4 таким образом, чтобы перемещение первого тела 4 относительно корпуса 1 вдоль чувствительной оси X приводило к усилению электростатической связи для одной из пар вторых тел 11.1, 12.1, 11.2, 12.2 и к ослаблению электростатической связи для другой из пар вторых тел 11.1, 12.1, 11.2, 12.2.
Средства 18.1, 18.2 поверхностной электростатической связи установлены между указанным участком 7 и вторыми телами 11.1, 12.1, 11.2, 12.2 и имеют вид гребенчатых электродов, зубья которых расположены параллельно чувствительной оси X. Таким образом, каждое из вторых тел 11.1, 12.1, 11.2, 12.2 оснащено одним из гребенчатых электродов, и участок 7 тоже имеет гребенчатый электрод напротив каждого гребенчатого электрода вторых тел 11.1, 12.1, 11.2, 12.2 таким образом, что находящиеся друг против друга зубья гребенчатых электродов заходят один в другой. Находящиеся друг против друга зубья гребенчатых электродов имеют таким образом расположенные друг против друга поверхности, параллельные чувствительной оси X и определяющие значение электростатической связи, обеспечиваемой указанными электродами, когда на них подают электрическое напряжение. В случае перемещения участка 7 относительно корпуса 1 поверхность зубьев, находящихся друг против друга, увеличивается или уменьшается в зависимости от рассматриваемого резонатора, что приводит к усилению или к ослаблению электростатической связи и, следовательно, жесткости рассматриваемого резонатора.
Электроды преобразователей и электроды средств электростатической связи подключены по меньшей мере к одному источнику электрического напряжения при помощи средств соединения, которыми управляет блок 8 управления для выборочной подачи напряжения на указанные электроды. Эти средства соединения и источник напряжения сами по себе известны и их подробное описание опускается.
Понятно, что под действием ускорения, сообщаемого корпусу 1, первое тело 4 будет перемещаться, что приведет к изменению электростатической связи (и, следовательно, к изменению электростатической жесткости резонаторов 10.1, 10.2), что приводит к изменению резонансной частоты резонаторов 10.1, 10.2.
Как известно, блок 8 управления содержит запоминающее устройство, содержащее компьютерную программу, и процессор, выполненный с возможностью исполнения указанной программы. Эта программа позволяет осуществлять способы управления датчиком.
Таким образом, изобретение относится также к способам управления этим датчиком, установленным, например, в транспортном средстве вместе с другими датчиками для передачи измерений в центральный навигационный пост или в центральный пост управления транспортным средством.
Первый из этих способов содержит следующие этапы:
- при помощи первых преобразователей 9 обнаруживают перемещение первого тела 4 для определения первого значения ускорения,
- при помощи вторых преобразователей 17.1, 17.2 обнаруживают изменение частоты резонаторов 10.1, 10.2 для определения второго значения ускорения.
Таким образом, первое значение получают, используя датчик в качестве маятникового акселерометра, а второе значение получают, используя датчик в качестве вибрирующего акселерометра.
В простой версии способ содержит этап, на котором в качестве значения ускорения берут среднее из первого значения ускорения и второго значения ускорения. Следует отметить, что это среднее можно вычислить посредством предварительной установки весовых коэффициентов для первого и второго значений ускорения. Весовые коэффициенты можно зафиксировать раз и навсегда, например, во время этапа калибровки на заводе, чтобы учитывать характеристики, связанные с датчиком в маятниковом режиме и с датчиком в вибрирующем режиме, или их можно изменять в зависимости от параметров окружающей среды, таких как температура. В этом случае рядом с датчиком расположен температурный датчик, связанный с блоком 8 управления, и блок 8 управления содержит запоминающее устройство, содержащее значения коэффициентов в зависимости от температуры.
Изобретение относится также к второму способу управления этим датчиком, который позволяет производить тестирование или калибровку датчика.
Этот способ содержит следующие этапы:
- первому телу 4 сообщают заранее определенное движение при помощи первых преобразователей 9, которое аналогично движению, возникающему при ускорении,
- обрабатывают сигнал, поступающий от вторых преобразователей 17.1, 17.2, для определения значения ускорения.
Зная характеристики заранее определенного движения (следует отметить, что первые преобразователи 9 можно использовать для определения реальных характеристик этого движения), можно определить теоретический сигнал, который должны были бы выдавать вторые преобразователи 17.1, 17.2, и, следовательно, теоретическое значение ускорения. Блок 8 управления запрограммирован таким образом, чтобы вычислять это теоретическое значение ускорения и сравнивать его со значением ускорения, определенным на основании сигнала, реально поступающего от вторых преобразователей 17.1, 17.2. Это позволяет проверять целостность датчика и, в частности, эффективность преобразователей и подвижность тела 4.
Предпочтительно блок 8 управления выполнен таким образом, чтобы в зависимости от разности между двумя значениями определять поправку для применения к значению ускорения, определенному на основании сигналов, выдаваемых вторыми преобразователями 17.1, 17.2. Блок 8 управления выполнен также с возможностью использования результата сравнения для обновления модели погрешности датчика. В варианте результат сравнения используют для осуществления регулировки напряжений, подаваемых на различные электроды датчика, с целью минимизации отмечаемой погрешности.
Предпочтительно блок 8 управления запрограммирован таким образом, чтобы периодически осуществлять этот способ калибровки или тестирования.
Блок 8 управления выполнен также с возможностью управления первыми преобразователями 9 с целью фильтрации помех (таких как вибрации, порождаемые носителем датчика) и реализации, например, активной подвески, осуществляющей управляемое демпфирование первой собственной моды первого тела 4.
Разумеется, изобретение не ограничено описанными вариантами выполнения и охватывает любую версию, не выходящую за рамки объема изобретения, определенные формулой изобретения.
В частности, первое тело может иметь форму, отличную от описанной, например форму пластины, в которой выполнена только одна полость для размещения обоих резонаторов.
Заявленный датчик можно применять для обнаружения любой величины, которая может выражаться в перемещении первого тела относительно корпуса, например ускорения, давления или другой величины.
Реферат
Группа изобретений относится к датчику, используемому для обнаружения ускорения, давления или, в целом, любой физической величины, изменение которой может привести к перемещению подвижного тела относительно корпуса. Датчик для измерения давления или ускорения содержит корпус; первое тело, подвижное вдоль чувствительной оси, две пары вторых тел, расположенные симметрично относительно первого тела вдоль чувствительной оси; преобразователи для обнаружения положения первого тела относительно корпуса, сообщения колебаний вторым телам вдоль оси вибрации и обнаружения частоты колебаний вторых тел; и средства поверхностной электростатической связи, связывающие каждое второе тело с первым телом таким образом, чтобы перемещение первого тела относительно корпуса вдоль чувствительной оси приводило соответственно к усилению или к ослаблению электростатической связи для одной и другой из пар вторых тел. Технический результат – повышение точности измерения. 2 н. и 6 з.п. ф-лы, 2 ил.
Комментарии