Датчик угловой скорости на базе динамически настраиваемого гироскопа - RU2709028C1
Код документа: RU2709028C1
Чертежи

Описание
Изобретение относится к области измерительной техники, а именно к гироскопическим преобразователям угловой скорости на базе динамически настраиваемого гироскопа.
Известен датчик угловой скорости [1] содержащий корпус, динамически настроенный ротор и два канала измерения, каждый из которых содержит преобразователь угла, усилитель и преобразователь момента с измерителем тока.
Преобразователь угла и момента выполняют функции датчиков угла и момента гироскопа соответственно.
Наиболее близким по технической решению является датчик угловой скорости [2] содержащий корпус, ротор в двухосном динамически настроенном подвесе и два канала измерения каждый, из которых содержит датчик угла ДУ, усилитель, датчик момента ДМ с обмоткой управления и измеритель тока датчика момента, причем датчик угла и датчик момента расположены на осях чувствительности гироскопа перпендикулярных друг другу, выход усилителя подключен ко входу датчика момента, а измеритель тока датчика момента включен последовательно в цепь его обмотки управления.
Недостатком такого датчика угловой скорости является погрешность измерения знакопеременной угловой скорости, обусловленная наличием перекрестной связи между измерительными каналами гироскопа из-за конечной величины квазиупругой жесткости подвеса ротора гироскопа, то есть при действии угловой скорости, изменяющейся по синусоидальному закону, по одному измерительному каналу на выходе перекрестного измерительного канала появляется паразитный сигнал с той же частотой, хотя угловая по данному измерительному каналу не действует, при этом величина паразитного сигнала помехи возрастает с ростом частоты действующей угловой скорости.
При измерении постоянных угловых скоростей данная погрешность отсутствует.
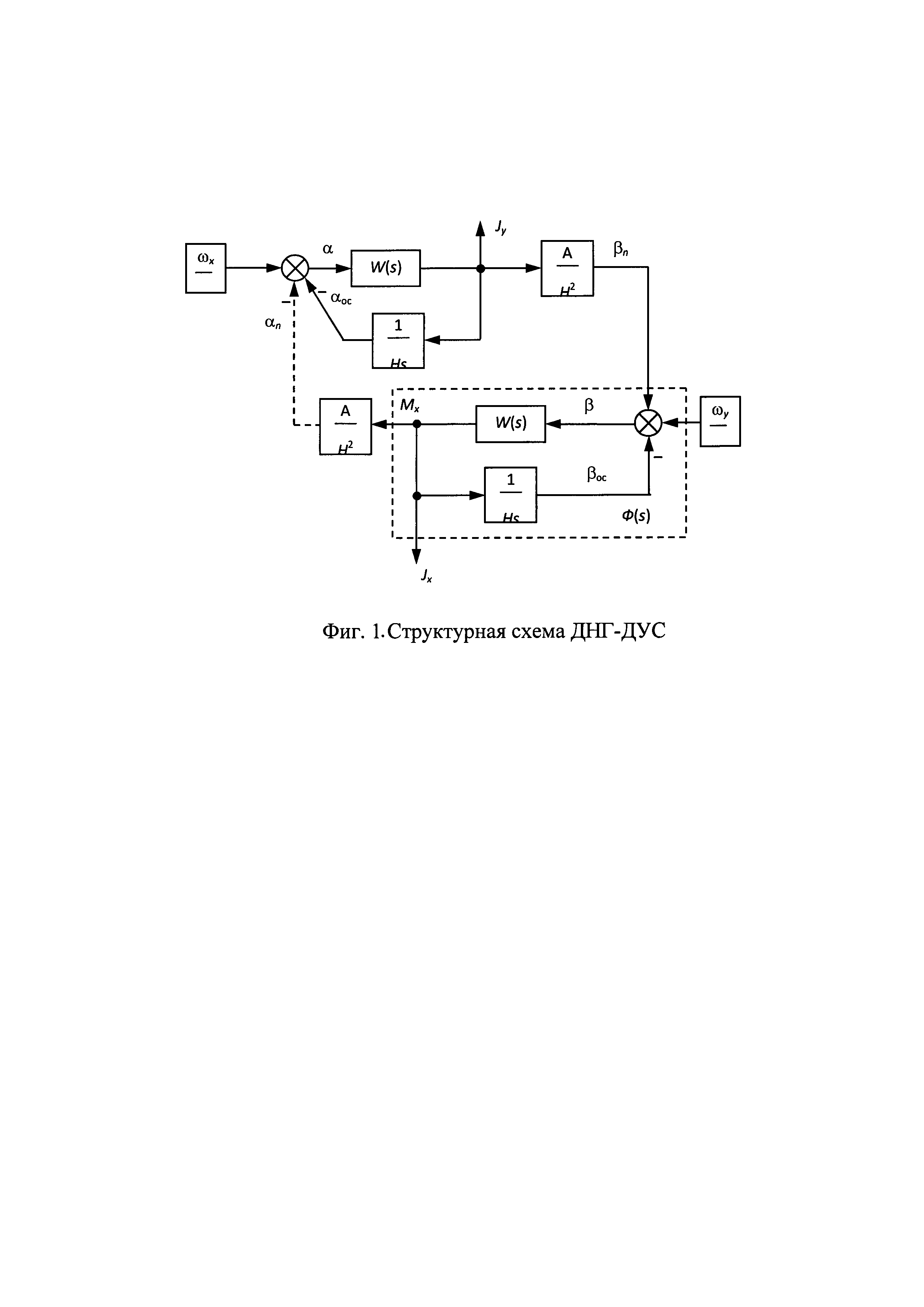
Для пояснения механизма возникновения данной погрешности представим структурную схему датчика углов My скорости в следующем виде.
На Фиг. 1 обозначено:
W(s) - передаточная функция усилителя каждого канала,
Kду - крутизна датчика угла,
ωx и ωy - угловые скорости корпуса вокруг осей x и y,


αn, βn - углы нутационных бросков ротора вокруг осей x и y,
αос, βос - углы прецессионного движения ротора вокруг осей x и y,
α, β - углы отклонений ротора относительно корпуса вокруг осей x и y,
Mx и My - моменты, развиваемые датчиками моментов вокруг осей x и y, и вызываемые соответственно токами Jx и Jy.
Для анализа возможности компенсации перекрестной погрешности гироскопа в режиме датчика угловой скорости полагаем, что корпус гироскопа вращается лишь вокруг оси x, т.е. ωx≠0, а ωy≠0. Также полагаем, что при этом величина перекрестной чувствительности достаточно мала в сравнении с основным сигналом, т.е. Jx<
Прямой канал обеспечивает измерение угловой скорости корпуса ωx вокруг оси x. Величина выходного сигнала Jy, в соответствии с Фиг. 1., определяется выражением

Для исключения угла поворота ротора относительно корпуса α при измерении постоянной угловой скорости в W(s) вводится изодром, т.е.

Тогда


При этом будет иметь место сигнал в перекрестном канале, равный

и относительная величина перекрестной погрешности равна

На практике обычно T1>T, поэтому относительную погрешность можно приближенно представить в виде

Отсюда следует, что в установившемся режиме при постоянной скорости ωx относительная перекрестная погрешность δJ отсутствует, а при гармонически изменяющейся входной скорости на частотах
Таким образом максимальное значение относительной погрешности имеет место на частотах входной скорости

Углы поворота ротора гироскопа относительно корпуса равны

где
Причиной возникновения сигнала в перекрестном канале является нутационный бросок ротора гироскопа по перекрестной оси, возникающий при входной угловой скорости ωx из-за конечной величины квазиупрутой жесткости подвеса ротора гироскопа.
С целью уменьшения ошибки от перекрестной угловой скорости, в контур обратной связи ДУСа по каждому каналу измерения введены сумматор и дополнительный усилитель с коэффициентом усиления, прямо пропорциональным произведению коэффициентов передачи датчика угла и датчика момента по току и обратно пропорциональным квазиупругой жесткости гироскопа, причем выход датчика угла подключен к первому входу сумматора этого канала, измеритель тока датчика момента перекрестного канала измерения подключен через дополнительный усилитель ко второму входу сумматора, а выход сумматора подключен к входу усилителя того же канала измерения.
Компенсация погрешности от перекрестной связи (для одного измерительного канала) производится в соответствии со структурной схемой, представленной на Фиг. 2.
Здесь пунктиром отображена цепь компенсации перекрестной ошибки с передаточной функцией

Из структурной схемы на Фиг. 2 видно, что передаточная функция, определяющая связь между прямым и перекрестным каналами, Фс=0, откуда следует, что выходной сигнал по перекрестной оси
Jx~Mx=My⋅Фс(s)⋅Ф(s)=0,
т.е. перекрестная связь между каналами отсутствует.
Таким образом, для компенсации перекрестной ошибки по этому способу, необходимо выходной сигнал Jy~My по прямой цепи умножить на крутизну датчика угла Kду, разделить на квазиупругую жесткость гироскопа

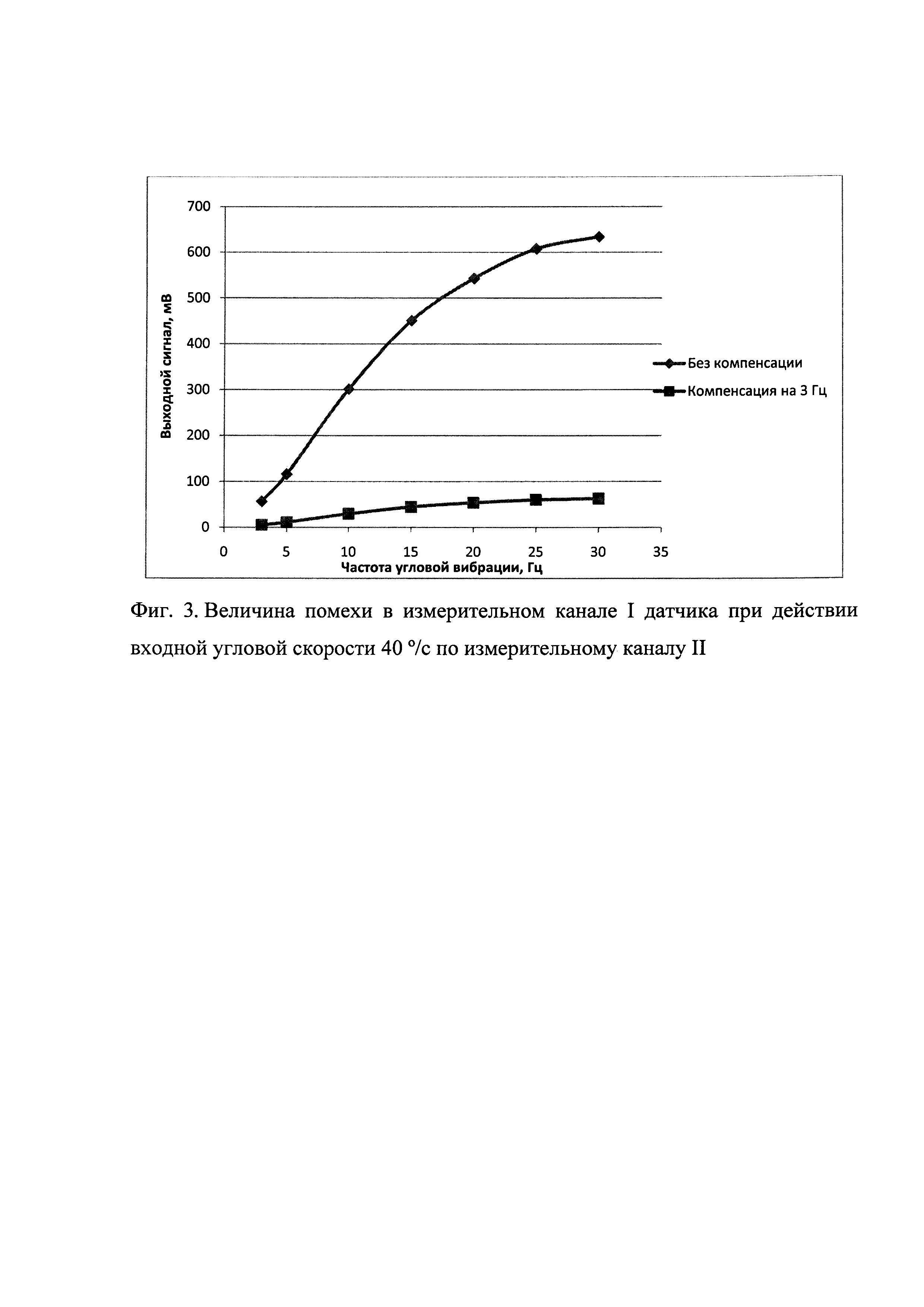
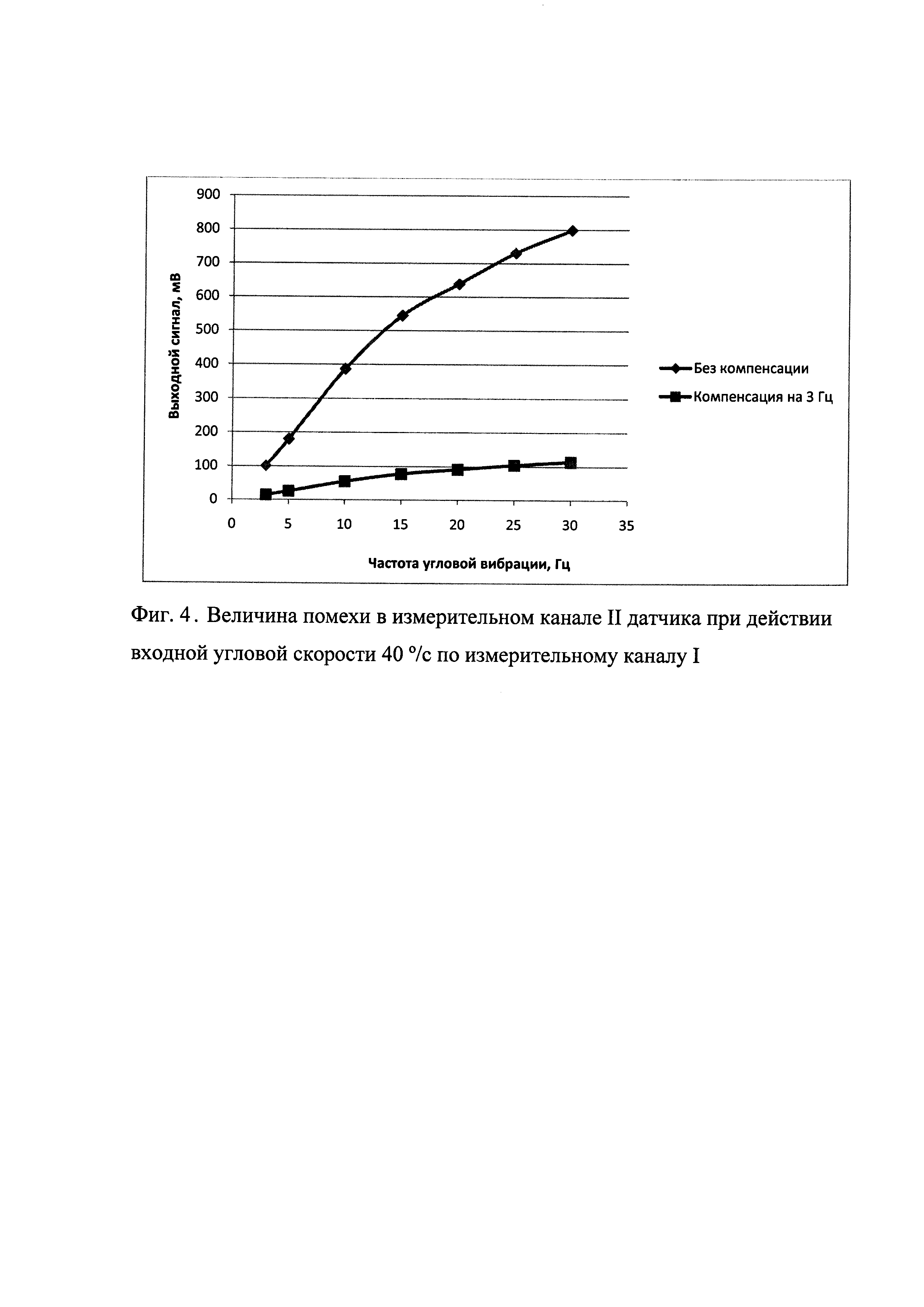
Результаты экспериментальной проверки датчика ДУС РВГ-01 №50 с реализованным алгоритмом компенсации погрешности от перекрестной связи для входной угловой скорости 40°/с в диапазоне частот (3…35) Гц представлены на Фиг. 3, Фиг. 4.
Как видно из Фиг. 3 и Фиг. 4 использование компенсации перекрестных связей в датчике угловой скорости на базе динамически настраиваемого гироскопа обеспечивает снижение погрешности в 10…20 раз.
Источники информации
1. "Динамически настраиваемые гироскопы." Д.С. Пельпор, В.А. Матвеев, В.Д. Арсеньев. "Машиностроение", Москва, 1988 г., стр. 249-252.
2. "Гироскоп - это просто." В.А. Матвеев, МГТУ им. Н.Э. Баумана, Москва, 2012 г., стр. 146-148.
Реферат
Изобретение относится к области измерительной техники, а именно к гироскопическим преобразователям угловой скорости на базе динамически настраиваемого гироскопа. Датчик угловой скорости (ДУС) на базе динамически настраиваемого гироскопа содержит корпус, ротор, в двухосном кардановом подвесе и два канала измерения, каждый из которых содержит датчик угла, усилитель, датчик момента с обмоткой управления и измеритель тока датчика момента, при этом датчик угла и датчик момента расположены на осях чувствительности, перпендикулярных друг другу, а измеритель тока датчика момента включен последовательно в цепь его обмотки управления. В ДУС введен сумматор и дополнительный усилитель с коэффициентом усиления, прямо пропорциональным произведению коэффициентов передачи датчиков угла и датчика момента по току и обратно пропорциональным квазиупругой жесткости гироскопа. Технический результат - повышение точности измерения угловой скорости за счет уменьшения погрешности от перекрестной связи между измерительными каналами ДУСа. 4 ил.
Комментарии