Способ определения местоположения подвижных объектов и устройство для его реализации - RU2098764C1
Код документа: RU2098764C1
Чертежи

Описание
Изобретение относится к приборостроению и может быть использовано в приборах для определения координат подвижных объектов, включая человека, а также легких летательных аппаратов, катеров, яхт.
Известен способ определения месторождения, описанный в Заявке на выдачу Европейского патента N 0226653, кл. G 01 C 17/38, 20.12.85 г. "Способ автоматической калибровки и определения курсового угла с помощью трехосного магнитометра, неподвижно закрепленного в самолете".
Известный способ определения месторождения заключается в следующем:
1) используют точные значения опорных направлений и географических координат (долгота, широта) в
нескольких
контрольных точках, в которых преобладает однородное, свободное от аномалий, магнитное поле Земли (МПЗ), величина и наклонение вектора напряженности которого точно известны;
2)
проводят
калибровочный испытательный полет, который покрывает все необходимые для калибровки области курсового угла, крена и тангажа и определяет в контрольных точках отклонение измеренных значений
проекций
магнитного поля от опорных составляющих, в решающем блоке рассчитывают коэффициенты коррекции магнитного поля;
3) в каждом рабочем цикле измеряют значения проекций магнитного поля,
проводят
коррекцию и с учетом углов крена и тангажа определяют значения горизонтальных проекций магнитного поля, по которым определяют магнитный азимут направления движения и затем с учетом скорости
самолета,
определяют координаты самолета.
Известный способ отличается сложностью, кроме того, процесс калибровки, например, для наземных подвижных объектов практически не может быть осуществлен.
Наиболее близким по технической сущности к предлагаемому способу является способ, описанный в патенте США N 4539760, кл. G 01 C 17/38, 10.09.1985г. "Электронный компас навигационной системы для транспортных средств, содержащий три датчика магнитного поля, датчики наклона и устройство памяти".
Известный способ определения месторождения транспортных
средств с помощью трех датчиков магнитного поля, датчиков наклона и датчика скорости заключается в следующем:
1) в калибровочном цикле осуществляют движение транспортного средства (объекта)
по заданной траектории с заданными углами крена и тангажа, проводят измерение проекций суммарного вектора напряженности МПЗ и магнитного поля транспортного средства на оси приборной системы координат
тремя датчиками магнитного поля в девяти точках, разнесенных по трехмерной поверхности эллипсоидного магнитного годографа и достаточных для его полного определения;
2) по измеренным
значениям
определяют девять коэффициентов путем решения системы девяти линейных уравнений;
3) на основе полученных коэффициентах определяют путем решения систем линейных и кубического
уравнений
коэффициенты коррекции магнитного поля - координаты центра эллипсоида, девяти значений конусов направления осей эллипсоида и три коэффициента масштабирования осей эллипсоида;
4) в
каждом
рабочем цикле проводят измерения проекций суммарного вектора напряженности МПЗ и магнитного поля транспортного средства на оси приборной системы координат;
5) проводят компенсацию
магнитного
поля транспортного средства путем сдвига центра эллипсоида магнитного годографа, поворота, масштабирования и обратного поворота осей эллипсоида;
6) проводят определение
горизонтальных
проекций МПЗ путем преобразования приборной системы координат в горизонтальную, при этом используют значения измеренных углов тангажа и крена;
7) по значениям горизонтальных
проекций МПЗ
определяют азимутальный угол направления движения, по которому с учетом скорости перемещения определяют координаты транспортного средства.
Для реализации известного способа используют устройство, описанное в патенте США N 4539760. Устройство содержит три ортогонально расположенных датчика магнитного поля, датчики наклона, датчик скорости, блок расчета коэффициентов коррекции, блок расчета горизонтальных проекций магнитного поля, блок коррекции магнитного поля, навигационный блок и блок управления, выход датчика скорости соединен с входом навигационного блока, выходы которого соединены с первым входами блока управления, первые выходы которого соединены с первыми входами навигационного блока, группа выходов блока коэффициентов коррекции соединена с группой входов блока коррекции магнитного поля.
Устройство также содержит первый, второй, третий, четвертый и пятый аналого-цифровой преобразователи и переключатель, блок расчета коэффициентов коррекции выполнен в виде блока расчета коэффициентов коррекции эллипсоида магнитного годографа и содержит последовательно включенные запоминающее устройство калибровочных значений, процессор расчета постоянных эллипсоида, процессор расчета смещения центра эллипсоида, процессор расчета поворота осей эллипсоида и процессор расчета коэффициентов масштабирования, входы запоминающего устройства калибровочных значений являются входами блока расчета коэффициентов коррекции, вторые выходы процессора расчета смещения центра эллипсоида и процессора расчета поворота осей эллипсоида, а также выходы процессора расчета коэффициентов масштабирования являются, соответственно, первыми, вторыми и третьими выходами блока коэффициентов коррекции, блок магнитного поля выполнен в виде коррекции проекций суммарного вектора напряженности МПЗ и магнитного поля транспортного средства и содержит последовательно включенные устройство трансляции, блок поворота осей эллипсоида, блок масштабирования и блок обратного поворота осей эллипсоида, входы устройства трансляции являются входами блока коррекции магнитного поля, вторые входы устройства трансляции, блока поворота осей эллипсоида, блока масштабирования и блока обратного поворота осей эллипсоида являются, соответственно, вторыми, третьими, четвертыми и пятыми входами блока коррекции магнитного поля, выходы блока обратного поворота осей эллипсоида являются выходами блока коррекции магнитного поля, датчики наклона выполнены в виде датчиков тангажа и крена транспортного средства, блок расчета горизонтальных проекций магнитного поля выполнен в виде блока расчета горизонтальных проекций вектора напряженности МПЗ, выходы датчиков магнитного поля через первый, второй и третий аналого-цифровой преобразователь подключены к входам переключателя, первые выходы которого соединены с входами блока расчета коэффициентов коррекции, а вторые выходы соединены с первыми входами блока коррекции магнитного поля, выходы которого соединены с первыми входами блока расчета горизонтальных проекций магнитного поля, выходы которого соединены со вторыми входами навигационного блока, выходы датчиков наклона через четвертый и пятый аналого-цифровой преобразователь подключены к вторым входам блока расчета горизонтальных проекций магнитного поля, первые и третьи выходы блока расчета коэффициентов коррекции соединены, соответственно, со вторыми и четвертыми входами блока коррекции магнитного поля, а вторые выходы соединены с третьими и пятыми входами, выход блока управления соединен со входом переключателя.
Известный способ и устройство предназначены для использования в первую очередь на летательных аппаратах самолетах и вертолетах, эксплуатационный режим которых характеризуется значительными углами крена и тангажа. В этих случаях для определения точного значения магнитного азимута направления движения необходимо знать параметры трехмерного магнитного годографа, определяемого МПЗ и магнитным полем объекта. Если магнитное поле, детектируемое тремя ортогональными магнитометрами, изобразить в трехмерной координатной системе, то поверхностный магнитный годограф может быть получен для всех направлений движения и наклонов объекта. В идеальном случае эта поверхность будет сферической, но в результате паразитных магнитных полей, создаваемых подвижным объектом, идеальная форма нарушается и принимает вид эллипсоида. Паразитное магнитное поле включает постоянное магнитное поле и индуцированное магнитное поле объекта и, используя значения коэффициентов, полученных в период калибровочного цикла, можно осуществить компенсацию постоянного и индуцированного магнитных полей и получить точное значение направления движения объекта.
Известный способ определения местоположения подвижных объектов и устройство для его реализации отличаются большой сложностью. Реализация указанного способа требует больших аппаратных затрат, высокого быстродействия вычислительных узлов, большого энергопотребления.
Использование известного способа и устройства для наземных подвижных объектов ограничивается также следующими причинами.
Движение наземного транспортного средства характеризуется наличием в широком диапазоне вибраций и колебаний, которые фиксируются датчиками прибора и вносят ошибки в измерения. Для наземных объектов при использовании известного способа представляется весьма сложным процесс проведения калибровки, в котором необходимо осуществлять движение по определенной траектории с заданными углами крена и тангажа. Еще более сложной задачей является использование известного способа и устройства для человека, передвигающегося пешим порядком. При ходьбе человека возникают ускорения и угловые колебания его корпуса в трех плоскостях с периодом двойного шага. В этих случаях измеряемые мгновенные значения направления движения не совпадают с траекторией движения, что снижает точность измерения и практически исключает использование известного способа и устройства. Все это ограничивает область их применения.
Задача, на решение которой направлено изобретение, заключается в расширении области функционального применения предлагаемого способа и устройства за счет обеспечения возможности их использования на наземных подвижных объектах, включая человека, а также на легких летательных аппаратах, катерах, яхтах.
Технический результат, который может быть получен при осуществлении предлагаемого способа, заключается в повышении точности измерения направления движения и координат подвижных объектов, включая человека, передвигающегося пешим порядком, и упрощении порядка выполнения и условий осуществления способа.
Технический результат, который может быть получен при осуществлении предлагаемого устройства, заключается в повышении точности измерения направления движения и координат подвижных объектов, включая человека, передвигающегося пешим порядком, в снижении аппаратных затрат на реализацию устройства и требований к устройству по быстродействию и энергопотреблению.
Для решения
поставленной задачи предлагается способ, который
заключается в следующем:
1) в калибровочном цикле осуществляется разворот подвижного объекта на угол не менее 360o и определяют
значения горизонтальных проекций суммарного вектора
напряженности МПЗ и магнитного поля объекта в четырех точках горизонтального эллипса магнитного годографа;
2) по контрольным значениям
горизонтальных проекций определяют пять коэффициентов
коррекции горизонтального эллипса магнитного годографа - смещение центра эллипса, угол доворота осей, малую и большую полуоси эллипса;
3) в каждом рабочем цикле измеряют усредненные за время
0,1.2,0 с значения проекций суммарного вектора напряженности МПЗ и магнитного поля объекта и ускорения силы тяжести на оси приборной системы
координат;
4) по измеренным значениям проекций
определяют значения горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта на оси горизонтальной системы
координат объекта;
5) проводят коррекцию значений
горизонтальных проекций с помощью коэффициентов, полученных в калибровочном цикле, путем смещения центра эллипса магнитного годографа,
доворота осей эллипса и сжатия его осей;
6) по
скорректированным значениям проекций и пройденному пути определяют приращения прямоугольных координат;
7) с учетом координат исходной
точки определяют координаты подвижного объекта;
8) определяют магнитный азимут направления движения.
Решение задачи достигается также тем, что в устройство для определения местоположения подвижных объектов, содержащее датчики магнитного поля, датчики вертикали, датчик перемещения, блок расчета горизонтальных проекций магнитного поля, блок расчета коэффициентов коррекции, блок коррекции магнитного поля, навигационный блок и блок управления, при этом выход датчика перемещения соединен с входом навигационного блока, выходы которого соединены с первыми входами блока управления, первые выходы которого соединены с первыми входами навигационного блока, выходы блока расчета коэффициентов коррекции соединены с первыми входами блока коррекции магнитного поля, согласно изобретению введен блок преобразования и усреднения, выходы датчиков магнитного поля соединены с первыми входами блока преобразователя и усреднения, выходы датчиков вертикали соединены со вторыми входами блока преобразователя и усреднения, выходы которого соединены со входами блока расчета горизонтальных проекций магнитного поля, первые выходы которого соединены с первыми входами блока расчета коэффициентов коррекции, а вторые выходы соединены со вторыми входами блока коррекции магнитного поля, выходы которого соединены со вторыми входами навигационного блока, вторые, третьи и четвертые выходы блока управления соединены, соответственно, с третьими, четвертыми входами блока преобразования и усреднения и вторыми входами блока расчета коэффициентов коррекции, датчики вертикали выполнены в виде датчиков линейного ускорения, блок расчета горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта, блок расчета коэффициентов коррекции выполнен в виде блока расчета коэффициентов коррекции горизонтального эллипса магнитного годографа, а блок коррекции магнитного поля выполнен в виде блока коррекции горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта.
Введение в известный способ операции определения усредненных за время 0,1.2,0 с значений проекций суммарного вектора напряженности МПЗ и магнитного поля объекта на оси приборной системы координат, а также операции измерения и определения усредненных значений проекций ускорения силы тяжести обеспечивает повышение точности измерения направления движения и координат подвижных объектов, включая человека.
Определение в предлагаемом способе в калибровочном цикле значений горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта в точках горизонтального эллипса магнитного годографа и определение по контрольным значениям коэффициентов коррекции горизонтального эллипса магнитного годографа позволяют упростить условия проведения калибровки по сравнению с известным способом, в котором в калибровочном цикле осуществляют движение объекта по заданной траектории с заданными углами крена и тангажа, проводят измерение контрольных значений проекций суммарного вектора напряженности МПЗ и магнитного поля объекта в точках, разнесенных по трехмерной поверхности эллипсоидного магнитного годографа, и определяют по контрольным значениям девять постоянных коэффициентов и пятнадцать коэффициентов коррекции трехмерного эллипсоида магнитного годографа.
Определение в предлагаемом способе в каждом рабочем цикле по измеренным усредненным значениям проекций суммарного вектора магнитного поля и вектора ускорения силы тяжести значений горизонтальных проекций суммарного вектора магнитного поля, проведение коррекции горизонтальных проекций и определение с учетом пройденного пути координат объекта позволяет упростить способ по сравнению с известным, в котором в каждом рабочем цикле по измеренным значениям проекций суммарного вектора магнитного поля с учетом коэффициентов коррекции проводят коррекцию трехмерного эллипсоида магнитного годографа, с учетом измеренных углов крена и тангажа определяют горизонтальные проекции вектора МПЗ, определяют азимут направления движения и с учетом скорости перемещения определяют координаты объекта.
Введение в известное устройство блока преобразования и усреднения, выполнение датчиков вертикали в виде датчиков линейного ускорения позволяет повысить точность измерения направления движения и координат подвижных объектов, включая человека.
Введение в предлагаемое устройство по сравнению с известным вместо блока расчета горизонтальных проекций МПЗ блока расчета горизонтальных проекций суммарного вектора магнитного поля, вместо блока расчета коэффициентов коррекции трехмерного эллипсоида магнитного годографа блока расчета коэффициентов коррекции горизонтального эллипса магнитного годографа, вместо блока коррекции проекций суммарного вектора магнитного поля блока коррекции горизонтальных проекций суммарного вектора магнитного поля, а также выполнение датчиков в виде датчиков линейного ускорения позволяет на порядок снизить аппаратные затраты на реализацию устройства.
Кроме этого, введение в известное устройство блока преобразования и усреднения, а также перечисленного выше иного выполнения блоков позволяет снизить требования к устройству по быстродействию и энергопотреблению.
Все это обеспечивает решение задачи, на которое направлено заявляемое изобретение.
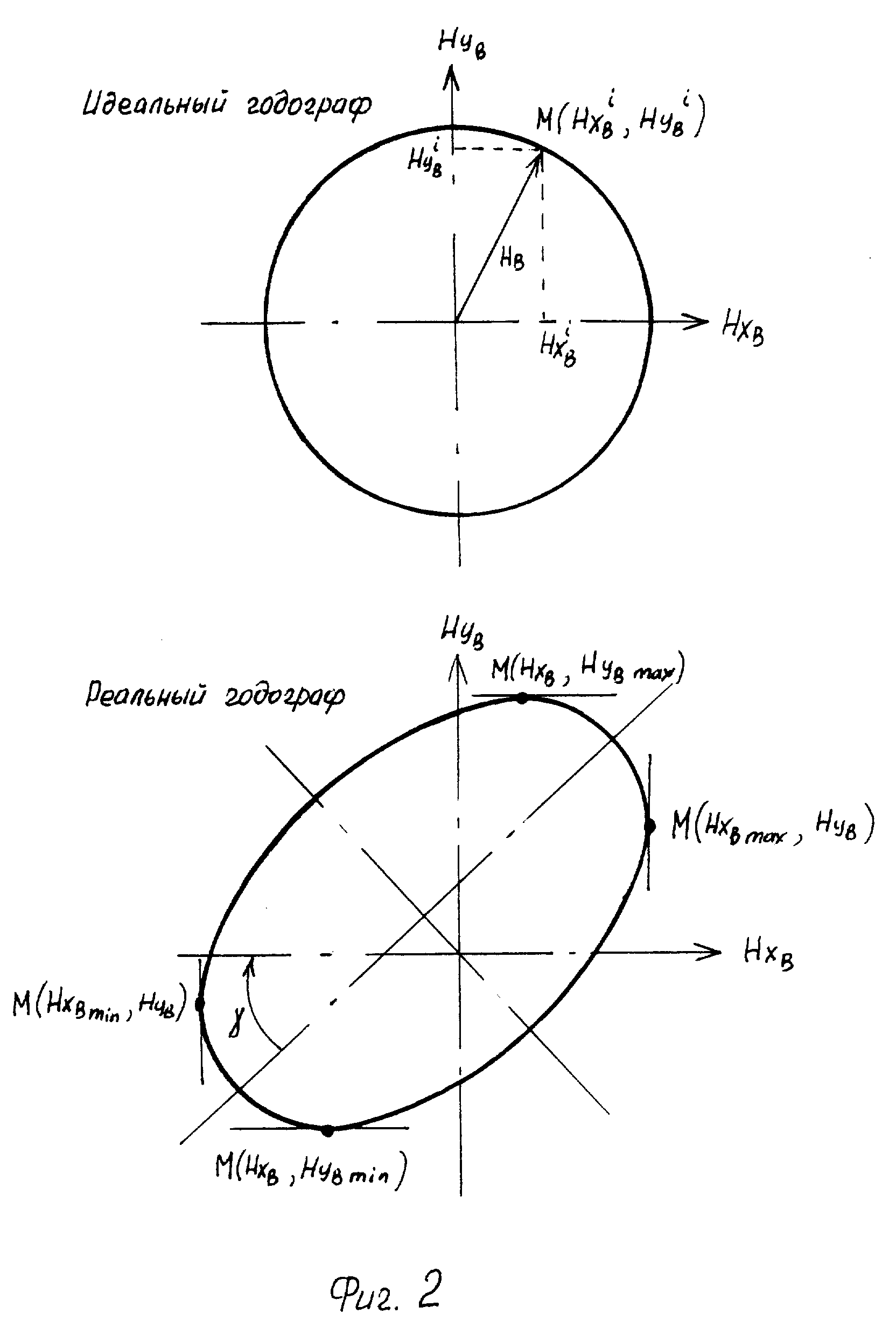
На фиг. 1 представлена система координат подвижного объекта; на фиг. 2 - идеальный и реальный горизонтальные годографы магнитного поля; на фиг. 3 - структурная схема устройства для определения местоположения подвижных объектов.
Предлагаемый способ заключается в следующем.
С помощью трех датчиков магнитного поля проводится измерение значений проекций Hx, Hy, Hz суммарного вектора напряженности МПЗ и паразитного магнитного поля подвижного объекта по трем взаимно ортогональным направлениям на оси приборной системы координат Oxyx, которая представлена на фиг. 1. Определим приборную систему координат Oxyz (фиг. 1) следующим образом: ось Y направим вдоль продольной оси подвижного объекта в направлении движения, ось Z вдоль вертикальной оси объекта, а ось X вдоль поперечной оси объекта. Введем горизонтальную систему координат OxBYВZВ следующим образом: ось Zb направим вертикально вверх, ось Yb в направлении движения в горизонтальной плоскости, ось Xb перпендикулярно направлению движения.
Для определения горизонтальных проекций магнитного поля необходимо знать направление вертикали по отношению к осям объекта. В этом случае целесообразно использовать три линейных акселерометра с осями чувствительности, направленными вдоль осей приборной системы координат Oxyz.
Акселерометры измеряют проекции кажущегося ускорения A объекта на оси приборной системы координат Oxyz. Пусть g ускорение силы тяжести. Тогда при равномерном прямолинейном движении объекта A g, т.е. вектор кажущегося ускорения направлен вертикально вверх.
Для расчета горизонтальных проекций HxB,HyB магнитного поля необходимо определить матрицу [Cb] перехода от приборной системы координат Oxyz к горизонтальной OxByBzB Зададим элементы этой матрицы компонентами ортов ib, jb, kb в приборной системе координат.
Для нахождения
матрицы [Cb] будем считать, что оси чувствительности
датчиков совпадают с осями приборной системы координат Oxyz, а ось Y лежит в вертикальной плоскости, проходящей через
направление движения. При постоянной скорости вектор кажущегося
ускорения A направлен вертикально вверх. Следовательно,

где
Компоненты вектора ib приборной системы координат находим из условия перпендикулярности к вертикальной плоскости, проходящей через приборную ось Y.

Наконец, для вектора jb получаем:

Отсюда можно определить матрицу [Cb] следующим образом:

где
С помощью этой матрицы определим горизонтальные проекции вектора магнитного поля в системе координат OxByBzB

В идеальном случае при отсутствии паразитных магнитных полей значения HxB, HyB определенные в соответствии с (5), могут быть использованы для определения азимутального направления движения. На практике идеальный магнитный годограф горизонтальной составляющей магнитного поля, имеющий форму окружности, смещен относительно начала координат из-за постоянного магнитного поля, создаваемого подвижным объектом, и затем принимает форму эллипса из-за индуцированного магнитного поля, формируемого подвижным объектом (фиг. 2). Таким образом, в реальной ситуации множество значений Hx, Hy принимают форму эллипса, оси которого в общем случае не параллельны осям чувствительности датчиков и, следовательно, необходимо провести преобразования координат, которые переводили бы эллипс в окружность. Для осуществления указанного преобразования необходимо знать пять параметров: δx, δy смещение центра эллипса, a и b полуоси эллипса, γ угол поворота осей эллипса. Для этого в калибровочном цикле предварительно определяют значениям магнитного поля в четырех точках эллипса годографа горизонтальной составляющей магнитного поля, соответствующий:
M(HxB,HyBmax) M(x1,y1);
M(HxBmax,HyB ) M(x2,y2);
M(HxB,HyBmin) M(x3,y3);
M(HxBmin,HyB) M(x4,y4);
где HxB,HyB определяются в соответствии с (5).
По этим значениям определяют корректирующие коэффициенты dxδy, γ a, b из выражений:

где


где:

Определенные в калибровочном цикле корректирующие коэффициенты δx, δ y, a, b, γ (sinγ, cosγ ) хранятся в запоминающем устройстве и используются в каждом цикле для коррекции (учета) паразитного магнитного поля, создаваемого подвижным объектом.
Горизонтальные проекции магнитного поля, как показано, могут быть определены из выражений (5). При этом учитывалось, что в состоянии покоя или при равномерном прямолинейном движении объекта вектор кажущегося ускорения направлен вертикально вверх, т.е. A g. Движение транспортного средства характеризуется наличием вибраций в широком диапазоне и колебаниями, вызываемыми неровностями дорог. Еще более сложный характер имеет движение человека. При ходьбе человека возникают квазипериодические ускорения и колебания туловища в трех плоскостях, которые воспринимаются датчиками магнитного поля и ускорения. При этом за период двойного шага человека для среднего темпа движения амплитудное значение ускорения туловища человека в вертикальной плоскости может изменяться от 0,8g до минус 0,5g, в продольной и поперечной плоскостях от 0,5g до минус 0,5g. В этой связи мгновенные значения измеренных проекций Hx, Hy, Hz магнитного поля и ускорения Ax, Ay, Az не могут быть использованы в выражении (5) для определения горизонтальных проекций магнитного поля, т.к. ошибки могут достигать недоступной величины. Необходимо определить период усреднения в первую очередь значений Ax, Ay, Az, среднее значение которых за этот период должны представлять собой проекции вектора g. Экспериментально установлено, что для наземных транспортных средств в зависимости от их типа такое усреднение должно проводиться не менее 0,1.0,5 с, для человека 0,5.2,0 с (0,5 период одного шага, 2,0 с удвоенный период двойного шага). Период усреднения значений Hx, Hy, Hz следует выбирать равным периоду усреднения проекций ускорения. Проведение усреднения менее 0,1 с для транспортного средства и менее 0,5 с для человека снижает точность определения отклонения объекта от вертикали и, тем самым, точность определения направления движения. Проведение усреднения более указанных значений приводит к ошибкам определения координат при поворотах объекта в процессе движения, в первую очередь, когда на маршруте движения повороты совершаются в основном в одну сторону.
Таким образом, в
каждом цикле измерения в течение 0,1.2,0 с проводится усреднение измеряемых значений магнитного поля и ускорения и затем в соответствии с выражениями (5) определяют
значения горизонтальных проекций
HxB, HyB магнитного поля и после этого проводят их коррекцию с учетом коэффициентов, определенных в калибровочном цикле. При этом учитывают
смещение δx, δy центра
эллипса магнитного годографа:
Определяют проекции


По скорректированным значениям горизонтальных проекций определяют приращения прямоугольных координат:

где
ΔX, ΔY приращения прямоугольных координат;
Δs приращение пройденного пути за цикл измерения;


δ угол между магнитным меридианом и вертикальной линией сетки прямоугольных координат.
Значения прямоугольных координат подвижного объекта определяют из выражений:

где
X, Y прямоугольные координаты подвижного объекта;
X0, Y0 прямоугольные координаты начальной точки;
ΔXi, ΔYi приращения координат за цикл измерения.
Магнитный азимут Am направления движения может быть определен по значениям горизонтальных проекций

Для практических целей удобнее определять азимут через тангенс половинного угла:

Отсюда получается формула, по которой можно вычислить Am во всем интервале его изменения:

Магнитный азимут направления движения может определяться в каждом рабочем цикле либо по мере необходимости, т.к. его значение непосредственно не используется в уравнениях (13), (14) для определения прямоугольных координат.
Ведение в известный способ операции определения усредненных за период измерения значений проекций ускорения силы тяжести и вектора напряженности магнитного поля, иной последовательности выполнения операций и порядка выполнения каждой операции обеспечивает повышенную точность определения направления движения и координат наземных транспортных средств в условиях воздействия вибраций и колебаний объекта, а также возможность определения координат человека, перемещение которого характеризуется тем, что мгновенные значения направления движения не совпадает с траекторией его движения. Возможность использования предлагаемого способа на наземных подвижных объектах заключается в его существенном упрощении, при этом общий объем вычислений на порядок меньше, чем у известного способа.
Устройство для определения месторождения подвижных объектов представлено на фиг. 3 и содержит три ортогонально расположенных датчика магнитного поля 1, датчики вертикали 2, датчик перемещения 3, блок расчета горизонтальных проекций магнитного поля 4, блок расчета коэффициентов коррекции 5, блок коррекции магнитного поля 6, навигационный блок 7 и блок управления 8.
Устройство содержит также блок преобразования и усреднения 9, который включает в себя первый и второй фильтры низких частот 10, 11, коммутатор 12, аналого-цифровой преобразователь 13 и блок суммирования 14, датчики вертикали 2 выполнены в виде датчиков линейного ускорения, блок 4 выполнен в виде блока расчета горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта, блок 5 выполнен в виде блока расчета коэффициентов коррекции горизонтального эллипса магнитного годографа, блок 6 выполнен в виде блока коррекции суммарного вектора напряженности МПЗ и магнитного поля объекта. На фиг. 3 показаны кроме этого блок индикации 15 и пульт управления 16.
Работа устройства основана на измерении в каждом рабочем цикле усредненных значений проекций вектора магнитного поля и ускорения силы тяжести на оси приборной системы координат, определении горизонтальных проекций вектора магнитного поля, коррекции горизонтальных проекций вектора магнитного поля, коррекции горизонтальных проекций с учетом коэффициентов коррекции, полученных в калибровочном цикле, определении приращений прямоугольных координат объекта по значениям горизонтальных проекций вектора МПЗ и измеренному значению приращения пройденного пути с последующим определением координат месторождения объекта и направления движения.
В исходной точке маршрута с пульта управления 16 через блок управления 8 вводят в навигационный блок 7 исходные данные координаты начальной точки, значение магнитного склонения (поправки направления) для данной местности и др. Контролируя вводимые значения с помощью блока индикации 15. В навигационном режиме измерения три ортогонально расположенных датчика магнитного поля и три датчика линейного ускорения непрерывно формируют на своих выходах аналоговые сигналы, пропорциональные значениям проекций Hx, Hy, Hz магнитного поля и проекций Ax, Ay, Az, ускорения силы тяжести на оси приборной системы координат Oxyz (фиг.1). Аналоговые сигналы датчиков через первый и второй блоки фильтров низкой частоты 10, 11 поступают на входы коммутатора 12. Постоянная времени блоков 10, 11 выбирается в диапазоне ≈0,05.0,1 с, что позволяет свести к минимуму влияние помех, связанных с вибрациями подвижного объекта.
В каждом цикле измерения коммутатор 12 обеспечивает последовательную подачу аналоговых сигналов датчиков на аналого-цифровой преобразователь 13. После преобразования в цифровой код они поступают на блок суммирования 14, обеспечивающий фактически определение из среднего значения за выбранный период усреднения. При использовании навигационной системы на транспортном средстве период усреднения выбирают в диапазоне 0,1.0,5 с, для человека 0,5.2,0 с. Частота опроса выходных сигналов датчиков магнитного поля и линейного ускорения устанавливаются равной 5.10 Гц. Длительность периода усреднения, частота опроса сигналов датчиков и порядок опроса определяются сигналами блока управления 8, поступающими с его вторых и третьих выходов, соответственно, на третьи входы коммутатора 12 и вторые входы блока суммирования 14. Все указанные параметры могут быть заданы с пульта управления 16 либо жестко установлены в блоке 8 при изготовлении.
Усредненные значения Hx, Hy, Hz, Ax, Ay, Az, поступают в блок 4 который проводит расчет значений горизонтальных проекций HxB,HyB вектора магнитного поля в соответствии с выражениями (5).
Рассчитанные значения HxB,HyB поступают в блок коррекции магнитного поля 6, который обеспечивает учет влияния паразитного магнитного поля подвижного объекта путем смещения центра эллипса магнитного годографа, доворота и сжатия осей эллипса в соответствии с выражениями (11), (12). В расчетах используются коэффициенты коррекции, которые определяются в калибровочном цикле и хранятся в блоке 5. Таким образом, выходной информацией блока коррекции магнитного поля 6 являются значения горизонтальных проекций

Навигационный блок 7 проводит расчет прямоугольных координат объекта в соответствии с (13) и (14). При этом используется информация с датчика перемещения 3 о приращении пути за период измерения. Расчет магнитного азимута направления движения проводится в соответствии с (17) в каждом цикле измерения либо по требованию оператора. С учетом значений магнитного склонения и сближения меридианов могут быть определены истинный азимут направления движения или дирекционный угол.
Предварительно до начала режима навигационных измерений проводят калибровочный цикл, в котором подвижной объект совершает разворот на угол не менее 360o. Блок расчета горизонтальных проекций магнитного поля 4 определяет циклически, как описано выше, значения Hx, Hy которые по сигналам блока управления поступают и накапливают в блоке расчета коэффициентов коррекции 5. После завершения разворота блок 5 из полученного множества значений Hx, Hy определяет четыре точки эллипса годографа горизонтальной составляющей магнитного поля, соответствующие (6), и по измеренным в этих точках значениям магнитного поля проводят расчет в соответствии с (7), (8), (9), (10) коэффициентов коррекции магнитного поля смещения центра эллипса магнитного годографа δx, δy угла поворота осей γ (sinγ, cosγ) полуоси эллипса b, a.
Команда на проведение калибровочного цикла поступает с четвертых выходов блока управления 8 на вторые входы блока расчета коэффициентов коррекции 5. Калибровочный цикл проводится, как правило, после первого включения устройства и затем в течение длительного периода рассчитанные коэффициенты используются в измерениях.
В предлагаемом устройстве могут быть использованы вычислительные средства с относительно низким быстродействием и энергопотреблением. Так, блок расчета горизонтальных проекций магнитного поля 4, блок расчета коэффициентов коррекции 5, блок коррекции магнитного поля 6, навигационный блок 7, блок управления 8 и блок суммирования 14 можно выполнить на однокристальной 8-ми разрядной ОЭВМ типа 1821BM85. Это связано с одной стороны с относительно небольшим объемом вычислений, с другой стороны с введением операции усреднения выходных сигналов датчиков магнитного поля 1 и датчиков линейного ускорения 2 и предлагаемой технической реализацией блока преобразования и усреднения. Введенные в блок 9 блоки фильтров низкой частоты 10, 11 кроме подавления высокочастотных помех фактически обеспечивают предварительное усреднение сигналов за время 0,1. 0,2 с. Это позволяет снизить требования к быстродействию аналого-цифрового преобразователя 13 и проводить последовательное преобразование выходных сигналов датчиков с помощью коммутатора 12, что уменьшает аппаратные затраты. Окончательное усреднение за выбранный период проводится блоком суммирования 14.
Датчики магнитного поля 1 могут быть выполнены на основе феррозондов, в качестве датчиков линейного ускорения могут быть использованы миниатюрные акселерометры типа АТ с емкостным преобразователем. В качестве датчика перемещения на наземном транспортном средстве могут быть использованы известные типы электромеханических датчиков, обеспечивающих учет оборотов колеса, для человека датчик шага.
Технический эффект от использования предлагаемого способа и устройства заключается в повышении точности измерения направления движения и координат наземных транспортных средств, а также в возможности определения координат человека в условиях воздействия ускорений и угловых колебаний в трех плоскостях, связанных с ходьбой человека. Кроме того, способ отличается простотой, что с учетом предложенного технического решения устройства позволяет на порядок сократить аппаратные затраты на его реализацию и снизить требования к устройству по быстродействию. Все это позволяет расширить область применения способа и устройства путем обеспечения возможности их широкого использования на наземных подвижных объектах, включая человека, а также на легких летательных аппаратах, катерах, яхтах. Способ и устройство могут быть использованы для определения ориентации в пространстве (относительно магнитного меридиана и вертикали) различных объектов, например антенн.
Наиболее успешно заявленный способ и устройство могут быть использованы при определении координат различных подвижных объектов, преимущественно малоподвижных или перемещающихся с относительно невысокой скоростью, таких как, легкий летательный аппарат (дирижабль, дельтоплан, аэроплан), легкое плавстредство (лодка, яхта, катер).
Реферат
Изобретение относится к приборостроению и может быть использовано в приборах для определения координат подвижных объектов, включая человека. Сущность изобретения: для определения местоположения подвижных объектов в калибровочном цикле осуществляют разворот объекта на угол не менее 360o и определяют значения горизонтальных проекций суммарного вектора напряженности магнитного поля Земли /МПЗ/ и магнитного поля объекта в четырех точках эллипса магнитного годографа, по измеренным значениям определяют пять корректирующих коэффициентов магнитного поля, в каждом цикле навигационных измерений определяют усредненные значения проекций вектора магнитного поля и ускорения силы тяжести на оси приборной системы координат, определяют горизонтальные проекции вектора магнитного поля, проводят коррекцию горизонтальных проекций магнитного поля, определяют приращения прямоугольных координат и координаты объекта, определяют магнитный азимут направления движения. Устройство для реализации данного способа содержит три датчика магнитного поля, датчики вертикали, датчик перемещения, блок расчета горизонтальных проекций магнитного поля, блок расчета корректирующих коэффициентов, блок коррекции магнитного поля, навигационный блок преобразования и усреднения. Устройство содержит также блок преобразования и усреднения, который включает в себя первый и второй блоки фильтров низких частот, коммутатор, аналого-цифровой преобразователь, блок суммирования, датчики вертикали выполнены в виде трех датчиков линейного ускорения. 2 с. и 6 з.п. ф-лы, 3 ил.

Формула


по которым определяют коэффициенты коррекции смещение δx, δy центра горизонтального эллипса магнитного годографа, угол доворота γ его осей и полуоси b, a из выражений
где


где

3. Способ по п.1, отличающийся тем, что в каждом рабочем цикле измеряют усредненные значения проекций Ax, Ay, Az ускорения силы тяжести и значения проекций Hx, Hy, Hz суммарного вектора напряженности МПЗ и магнитного поля объекта на оси приборной системы координат Oxyz, где ось y направлена вдоль продольной оси объекта в направлении движения, ось z вдоль вертикальной оси объекта, а ось x вдоль поперечной оси подвижного объекта, по которым определяют горизонтальные проекции




где


4. Способ по п. 1, отличающийся тем, что в каждом рабочем цикле при проведении коррекции горизонтальных проекций



и определяют составляющие



5. Способ по п.1, отличающийся тем, что в каждом рабочем цикле определяют приращения координат из выражений

где ΔX, ΔY - приращения прямоугольных координат, м;
Δs - приращение пройденного пути за рабочий цикл, м;



δ - угол между магнитным меридианом и вертикальной линией сетки прямоугольных координат,
значения прямоугольных координат объекта определяют из выражений
X = Xo+ ΣΔXi;
Y = Yo+ ΣΔYi,
где X, Y прямоугольные координаты объекта, м;
X0, Y0 прямоугольные координаты начальной точки, м;
ΔXi, ΔYi - приращения координат за рабочий цикл, м.

где АМ магнитный азимут.
Комментарии