Устройство нивелирования геодезического сканера - RU206087U1
Код документа: RU206087U1
Чертежи

Описание
Настоящая полезная модель относится к устройствам для крепления и выравнивания положения (нивелирования, горизонтирования) геодезических приборов, которые могут найти применение в металлургии, нефтехимической и других отраслях промышленности, где требуется проводить измерения размеров в труднодоступных местах, в частности определять состояние внутренних поверхностей аппаратуры и их отклонений от проектной геометрической формы.
В настоящее время для контроля состояния геометрии различного оборудования (плавильные или коксовые печи, производственные емкости, резервуары для хранения продуктов) используются трехмерные лазерные сканеры. 3D-сканеры используются для определения геометрии как внешних, так и внутренних стенок оборудования (например, патент RU 2694762 С1, опубликовано 16.07.2019г., патент RU 2590342 С1, опубликовано 10.07.2016г., патент RU 2581722 С1, опубликовано 20.04.2016г.).
Для получения точных данных о конфигурации внутренних поверхностей сканирование необходимо проводить под углами к поверхности, близкими к нормальным, для чего 3D-сканер требуется перемещать внутри аппаратов. Сооружение лесов и ручное перемещение 3D-сканера внутри оборудования является трудоемким и небезопасным мероприятием. Для установки и перемещения 3D-сканера возможно использовать устройства, опускаемые сверху через люк аппарата. В этом случае во избежание затенения сканирующего луча опорой (штангой) или подвесом, 3D-сканер целесообразно устанавливать в нестандартном – перевернутом положении. Технической проблемой использования сканера в перевернутом положении является необходимость его предварительного ориентирования – установки в горизонтальное исходное положение (горизонтирование, нивелирование). Эту операцию необходимо проводить после каждого перемещения с помощью внешних устройств, поскольку автоматическая ориентация сканера в нестандартном положении нарушается из-за отключения собственного горизонтирования.
Известно юстировочное устройство, содержащее неподвижное основание, соединенное пружиной с подвижным основанием, в котором закреплены три регулируемых по длине фиксаторных стержня, выполненные в виде винтов с гайками, незакрепленные концы которых контактируют с противоположным основанием, а в неподвижном основании выполнены пазы; подвижное основание снабжено цилиндрическим элементом для крепления юстируемого объекта, а неподвижное основание выполнено с отверстием, в котором размещен этот цилиндрический элемент; устройство снабжено механизмом поворота подвижного основания вокруг оси, перпендикулярной неподвижному основанию, содержащим четвертый, регулируемый по длине фиксаторный стержень, установленный с возможностью изменения расстояния от фиксаторного стержня, закрепленного в подвижном основании до упора, закрепленного в неподвижном основании (патент RU 2729953 С1, опубликовано 13.08.2020г.).
Недостатком известного юстировочного устройства является неудовлетворительная точность юстировки, вызванная большой погрешностью ручной настройки винтов и гаек, а также невозможностью юстирования и, соответственно, проведения измерений во внутренних труднодоступных местах оборудования.
Известно устройство автоматического нивелирования оборудования, которое содержит рабочий стол с четырьмя регулируемыми по высоте опорами с датчиками давления, программируемый логический контроллер и два двухосевых датчика наклона. Устройство позволяет в автоматическом режиме выравнивать поверхность рабочего стола в горизонтальной плоскости (заявка CN109000127 А, опубликовано 14.12.2018г.).
Недостатком известного устройства нивелирования является его сложность, поскольку требуется использовать два двухосевых датчика наклона и четыре датчика давления в приводах опор для выравнивания усилий на опорах и устранения возможной неоднозначности положения рабочего стола при использовании четырехточечной опорной схемы. Кроме того, в устройстве отсутствует встроенная опорная поверхность, относительно которой может перемещаться рабочий стол, что требует для работы устройства предварительной его установки в положение, близкое к горизонтальному, поскольку рабочий стол опирается на базовую (опорную) поверхность опорами без какого-либо крепления и удерживается на опорной поверхности только силой тяжести, что также делает невозможным его работу в перевернутом положении.
Известен также трегер с двойной горизонтальной юстировкой, содержащий нижнюю пластину для проверки состояния равновесия геодезического инструмента, расположенного на верхней стороне; нижние опорные ножки, расположенные под нижней пластиной и поддерживающие геодезический инструмент; верхние опорные ножки, расположенные поверх нижней пластины и имеющих соответствующие регулировочные винты для поддержания горизонтальности геодезического инструмента; верхнюю пластину, расположенную на верхних концах верхних опорных ножек; и приспособление для установки геодезического инструмента в центральной части вогнутой формы, расположенной сверху верхней пластины (патент KR101934414 В1, опубликовано 03.01.2019г.).
К недостаткам известного трегера можно отнести также невозможность его работы в перевернутом положении.
В качестве наиболее близкого технического решения выбрано устройство автоматического выравнивания, содержащее опорную плиту, на которую помещается требующий выравнивания геодезический прибор и три опоры с коническими наконечниками, которые опираются на какую-либо базовую поверхность. Две из трех опор посредством винтовой пары с электроприводом имеют возможность менять свою длину и, тем самым, изменять пространственное положение опорной плиты и, соответственно, прибора (патент EP3076126 В1, опубликовано 02.05.2018г.).
Основным недостатком ближайшего аналога является ограничение по первоначальной установке устройства из-за отсутствия в его конструкции второй опорной плиты, что приводит к невозможности установки геодезического прибора в перевернутое положение, поскольку опоры не связаны с базовой поверхностью и опираются на нее только коническими наконечниками.
Технической проблемой, решение которой обеспечивается заявляемой полезной моделью, является создание устройства нивелирования – для выравнивания в горизонтальной плоскости (горизонтирования) лазерного геодезического 3D-сканера (трегера), позволяющее осуществлять трехмерное лазерное сканирование внутренних поверхностей исследуемого оборудования с высокой точностью.
Технический результат, получаемый при использовании заявляемой полезной модели, заключается в возможности работы геодезического лазерного трехмерного сканера в нестандартном перевернутом положении.
Технический результат достигается тем, что устройство выравнивания геодезического лазерного сканера, содержащее первую плиту и соединенные с ней три опоры, одна из которых выполнена неподвижной, а две другие выполнены с возможностью изменения своей длины и содержат винтовые пары с электромеханическими приводами, согласно полезной модели устройство содержит вторую плиту, выполненную с возможностью углового перемещения относительно первой плиты и крепления к своей нижней поверхности геодезического лазерного сканера, шаговые двигатели, аккумулятор и дистанционно управляемый контроллер, при этом выполненная неподвижной опора соединена шарнирно с второй плитой, а две другие опоры соединены шарнирно с обеими плитами.
Техническая проблема была решена разработкой устройства пространственной ориентации в горизонтальной плоскости (горизонтирования) геодезического сканера, которое содержит две плиты, одна из которых является неподвижной, а другая плита предназначена для установки геодезического лазерного сканера в перевернутом положении к своей нижней поверхности и имеет возможность углового перемещения относительной первой неподвижной плиты. Это обеспечивает точную пространственную ориентацию сканера и позволяет проводить измерения геометрии поверхностей внутри промышленного оборудования быстро и с высокой точностью без затенения сканирующего луча элементами подвеса и перемещения.
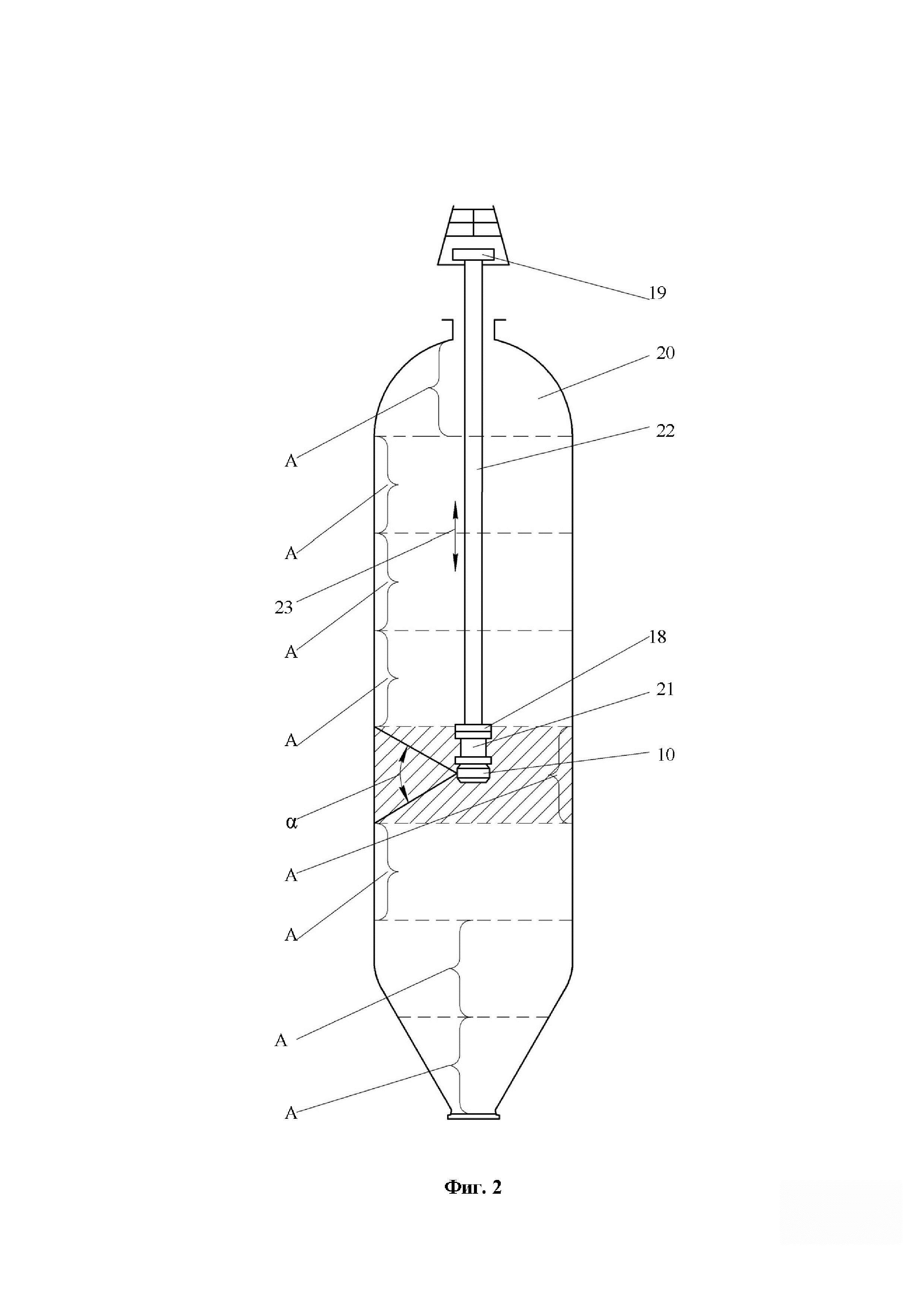
Настоящая полезная модель поясняется изображениями (фиг. 1-2), пример выполнения устройства выравнивания геодезического лазерного сканера на которых, однако, не является единственно возможным, но наглядно демонстрируют возможность достижения заявленного технического результата. При этом приведенные примеры выполнения заявленной полезной модели не ограничивают возможностей ее осуществления и не являются исчерпывающими. На фиг. 1 представлено устройство выравнивания, на фиг. 2 – устройство выравнивания со сканером внутри исследуемого объекта (резервуара).
На фигурах 1 и 2 позиции обозначены следующим образом
1 – первая плита,
2 - неподвижная опора,
3, 4 – подвижные опоры,
5 – переходные муфты,
6 – стягивающие винты,
7 – шкивы приводов,
8 – шаговые двигатели приводов,
9 – вторая плита,
10 – лазерный сканер,
11 – шарнир Гука,
12, 13, 14, 15 – шаровые опоры,
16 - контроллер,
17 - аккумулятор,
18 – крепление механизма перемещения лазерного сканера 10,
19 – механизм перемещения,
20 – исследуемый объект (коксовая камера),
21 – заявляемое устройство выравнивания сканера,
22 – штанга механизма 19 перемещения,
23 - обозначение направлений перемещения механизма 19 перемещения.
Согласно полезной модели устройство выравнивания геодезического сканера содержит первую плиту 1 и соединенные с ней три опоры 2, 3 и 4. Одна опора 2 выполнена неподвижной с постоянной длиной и, а две другие опоры 3 и 4 выполнены с возможностью изменения своей длины. Опоры 3 и 4 выполнены аналогично, и каждая опора содержит винтовую пару, содержащую переходные муфты 5 и стягивающий винт 6. Каждая опора также содержит электромеханический привод, выполненный в виде шкива 7 и шагового двигателя 8 (фиг. 1). Устройство содержит вторую плиту 9, выполненную с возможностью углового перемещения относительно первой плиты 1 и крепления к своей нижней поверхности геодезического лазерного сканера 10 (фиг. 2). Плита 9 предназначена для установки сканера, оснащена для этого постоянными или съемными элементами крепления сканера (условно не показаны) и имеет возможность углового перемещения относительно плиты 1 для точной пространственной ориентации (нивелирования, горизонтирования) сканера. Опора 2 имеет жесткое соединение с одной плитой, в данном случае с плитой 1, а с другой плитой, в данном случае плитой 9 соединена с помощью шарнира, например, шарнира Гука 11 для обеспечения возможности углового перемещения. Опоры 3 и 4 соединены с плитами 1 и 9 с помощью шаровых опор 12, 13, 14 и 15 (фиг. 1).
Стягивающие винты 6 имеют на своих концах правую и левую резьбы, переходные муфты 5 крепятся к плитам 1 и 9 шаровыми опорами 12-15. Вращая стягивающие винты 6 можно изменять их рабочую длину и, соответственно, расстояние между плитами 1 и 9, и, тем самым, угол наклона плиты 9 относительно плиты 1 в двух плоскостях независимо друг от друга. Стягивающие винты 6 вращаются электромеханическими приводами, для увеличения точности перемещения вращение осуществляется шаговыми двигателями 8 через шкивы 7. Управление приводами осуществляется дистанционно посредством встроенного в заявляемое устройство дистанционно управляемого контроллера 16, оснащенного датчиками положения и гироскопом (не показаны). Электропитание контроллера 16 и приводов производится с помощью встроенного в устройство выравнивания аккумулятора 17. Устройство выравнивания может быть оснащено предохранительными устройствами, ограничивающими угловое перемещение плиты 9 (на схеме условно не показаны) и снабжено выносным пультом, позволяющим дистанционно отслеживать и управлять пространственным положением сканера.
Заявляемое устройство нивелирования геодезического лазерного сканера работает следующим образом.
На крепление 18 механизма перемещения 19, например, на крепление 18 гидрорезака системы гидрорезки кокса коксовой камеры 20, устанавливается заявляемое устройство 21 непосредственно или с помощью переходных приспособлений (фиг. 2). На нижнюю поверхность плиты 9 устройства 21 выравнивания в перевернутом положении устанавливается геодезический 3D-сканер 10. С помощью механизма 19 перемещения штанга 22 с установленным на ней устройством 21 выравнивания и сканером 10 перемещается внутри коксовой камеры в первую рабочую точку (направления перемещения обозначены стрелками 23). При перемещениях сканера 10 из-за изменения положения механизма 19, штанги 22 и устройства 21 может происходить нарушение горизонтальности сканера, при этом на пульт управления поступает сигнал, пропорциональный отклонению плиты 9 от горизонта. После чего оператор по показаниям пульта управления производит дистанционное горизонтирование (нивелирование) сканера 10. При стягивании или растяжении стягивающих винтов 6 плита 9 наклоняется на необходимый угол, и при поочередной регулировке винтов 6 в опорах 3 и 4 плита 9 выставляется в горизонтальное положение (фиг.1). После приведения сканера 10 в рабочее положение производится сканирование участка внутренней поверхности (полоса А, ограниченная углом α раскрытия лучей сканера 10), например, коксовой камеры 20, и сканер 10 с помощью механизма 19 перемещения и штанги 22 (фиг.2) перемещается в следующую точку, далее цикл повторяется, причем полосы А сканирования могут располагаться на поверхности аппарата с перекрытием для получения более точных результатов измерения при последующей программной обработке. Таким образом, производится дистанционное сканирование всей внутренней поверхности исследуемого объекта на оптимальных для точности углах сканирования.
Реферат
Полезная модель относится к области устройств для крепления и выравнивания положения (нивелирования, горизонтирования) геодезических приборов. Технический результат заключается в возможности работы геодезического лазерного трехмерного сканера в нестандартном перевернутом положении. Устройство выравнивания геодезического лазерного сканера содержит первую плиту, вторую плиту, выполненную с возможностью углового перемещения относительно первой плиты и крепления к своей нижней поверхности геодезического лазерного сканера, и соединенные с ней три опоры, одна из которых выполнена неподвижной, а две другие выполнены с возможностью изменения своей длины и содержат винтовые пары с электромеханическими приводами, при этом выполненная неподвижной опора соединена шарнирно с второй плитой, а две другие опоры соединены шарнирно с обеими плитами. Устройство также содержит шаговые двигатели, аккумулятор и дистанционно управляемый контроллер. 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Комплекс для определения пространственных координат удаленного объекта, расположенного на местности
Комментарии