Сканирующий лазерный волнограф с регистрацией "мгновенной" формы поверхности - RU2749727C1
Код документа: RU2749727C1
Чертежи
Описание
Изобретение относится к области гидрометрии и океанографии, методам измерения высоты границы раздела между жидкостью и воздухом, методам измерения уклонов поверхности раздела, например, измерению высоты волнения, спектра волнения, спектра уклонов.
Известен способ определения высоты границы раздела воздух-жидкость и уклонов поверхности с помощью струнного волнографа [1]. В нем измеряют электрическое сопротивление вертикально расположенных струн, частично погруженных в жидкость. При изменении уровня жидкости сопротивление погруженной части струны уменьшается, и по общему сопротивлению каждой струны определяют высоту границы раздела. Недостатком метода является невысокая точность измерений из-за изменения сопротивления струны при ее смачивании, за счет осаждения солей и водорослей на струне и электроде, за счет флуктуаций сопротивления жидкости, из-за емкостных свойств электрической цепи. Другим способом является измерение углового положения бликов солнца, отраженных от поверхности с высоты самолета [2]. Но этот метод не является всепогодным, и сложен в реализации. Возможны измерения уклонов по отраженному лазерному излучению [3]. Недостатком этого способа является уход блика из апертуры приемной системы при даже небольших уклонах, что не позволяет измерять уклоны уже при умеренном волнении. В способе, описанном в [4] проводятся измерения высоты волнения водной поверхности относительно ее равновесного состояния и измерение уклонов поверхности. В методе три лазерных луча направляют вертикально вдоль оси Z, рассеянное излучение регистрируют с помощью цифровой видеокамеры, границы засветки лазерных лучей на цифровой матрице с учетом пространственной калибровки переводят в аппликаты волнения. При этом одновременное измерение аппликат в трех точках обеспечивает возможность регистрации уклонов в двух направлениях и получения двумерного распределения уклонов. Недостатком является фиксированный масштаб положения координат трех точек, а также суммирование изображения за время экспозиции одного кадра, что приводит к размытию границы засветки и ухудшению точности измерений.
Наиболее близким аналогом, (прототипом) является измерение аппликат волновой поверхности с помощью лазерного луча или лазерного ножа или двух ортогональных лазерных ножей, направляемых вдоль вертикальной оси, и регистрации одиночной или протяженной метки на поверхности с помощью цифровой видеокамеры [5]. При этом на основе пространственной калибровки матрицы видеокамеры проводится пересчет положения меток на видеокадре в пространственные координаты с дальнейшим вычислением аппликат и уклонов поверхности. Недостатком метода является суммирование изображения метки за время выдержки кадра, что приводит к размыванию точек по высоте. При скоростях вертикального перемещения волны 0.6 м/с (что происходит уже при ветре 10 м/с) и длительности выдержки 1/40 с размывание составит 15 мм, что приводит к низкой точности измерений как аппликат в отдельных точках поверхности, так и уклонов.
Технический результат предложенного способа заключается в многократном повышении точности и надежности измерений высот (аппликат) волновой поверхности вдоль линий сканирования, уклонов в каждой точке в выбранных направлениях и двумерных уклонов, усредненных на различных пространственных масштабах (от единиц миллиметра до метров). При этом повышается пространственное разрешение и удается регистрировать не только гравитационно-капиллярные, но и капиллярные волны.
Для достижения технического результата в предложенном способе лазерный луч направляют по вертикали вниз, рассеянное излучение регистрируют с помощью цифровой видеокамеры, верхнюю границу засветки лазерным лучом на видеокадрах с учетом калибровки переводят в аппликаты волнения.
Новым в способе является то, что лазерный луч сканирует по поверхности по известному пространственно временному закону с частотой видеосъемки, а мгновенный профиль поверхности вдоль траектории сканирования рассчитывают с учетом пространственно временного закона сканирования и скорости изменения высоты поверхности в каждой точке траекторий. Пространственная точность измерений повышается за счет того, что при сканировании время освещения каждой точки поверхности и размытие изображения за счет ее движения уменьшается в десятки раз. Надежность измерений повышается за счет повышения отношения сигнал/шум, поскольку луч не растягивается по поверхности, а фокусируется в одной точке траектории сканирования. Учет скорости сканирования лучей и скорости вертикального перемещения высоты поверхности в каждой точке траекторий позволяет привести профиль поверхности к единому моменту времени, например, равному моменту начала сканирования, т.е. получить мгновенный профиль поверхности. Анализ серии видеокадров позволяет получить временную зависимость высот и уклонов, что позволяет рассчитать пространственные и временные характеристики волнения. При этом на каждом видеокадре можно найти множество треугольников различного масштаба (от нескольких мм до максимального расстояния между точками лучей), что позволяет получать спектры уклонов различных масштабов. Использование интерференционных светофильтров и поляризаторов при регистрации лазерного излучения на камеры обеспечит селекцию только полезного излучения лазеров и снизит фоновое излучение. Это позволит проводить измерения в любое время суток.
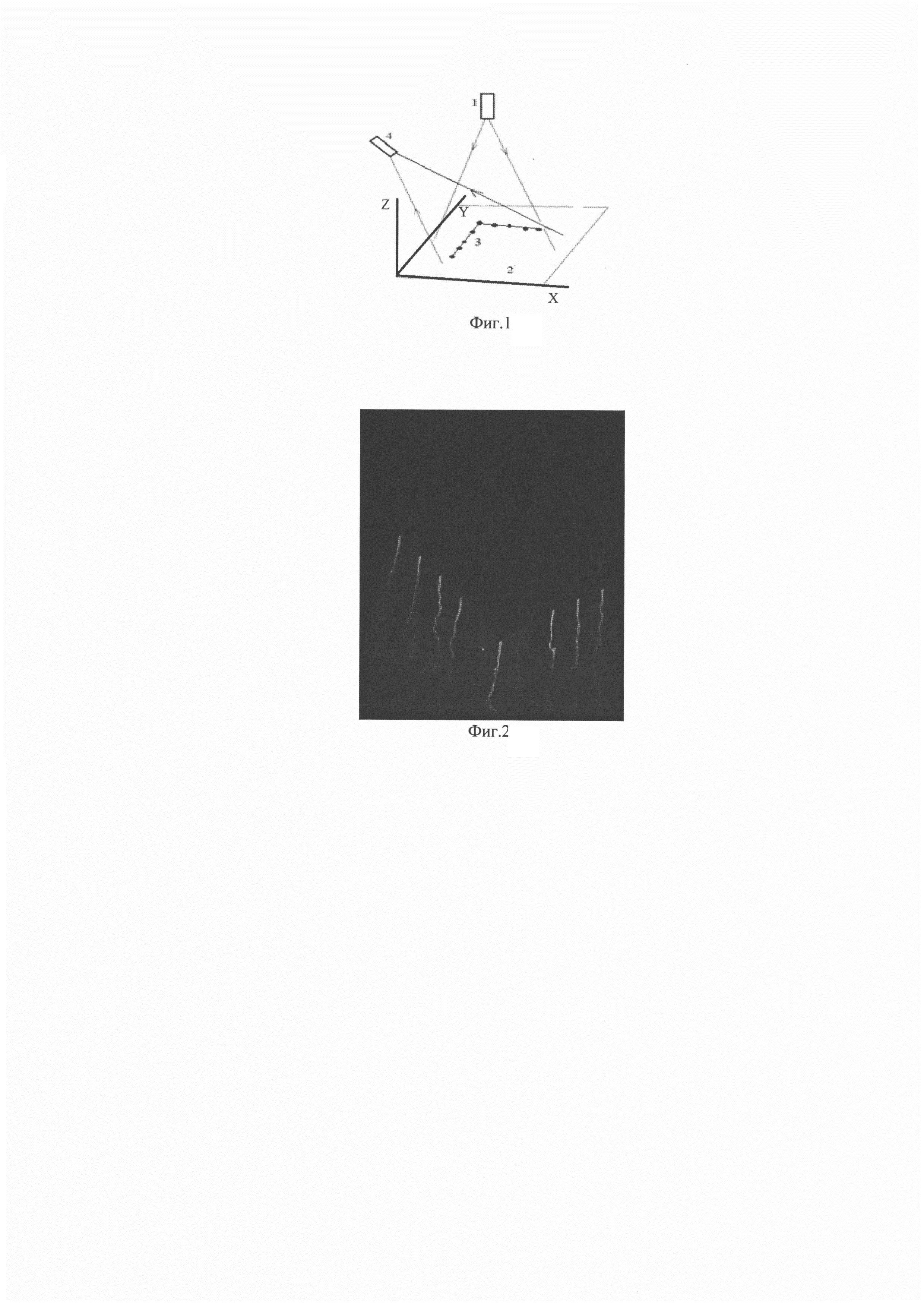
На фиг. 1 показана схема оптических измерений. Лазерная система 1 производит сканирование водной поверхности 2 по заданному пространственно временному закону по траектории 3. Видеокамера 4 регистрирует изображение верхней границы засветки с частотой видеосъемки.
На фиг. 2 представлен один видеокадр при натурных измерениях. Сканирующий луч кратковременно останавливался в отдельных точках и непрерывно перемещался на участке вблизи угла траектории по известному пространственно временному закону. При сканировании с частотой кадров верхняя кромка засветки соответствует точным координатам водной поверхности без размывания за время выдержки видеокадра.
В способе-прототипе происходит непрерывное освещение поверхности ножевым лучом. Учитывая, что скорость вертикального перемещения точек поверхности по оси Z может достигать 0.5-2 м/с, получается, что за время выдержки, например 0.02 с, освещенная лазерным ножом поверхность сместится по вертикали на 10-40 мм, а точность регистрации высоты в каждой точке будет иметь примерно такой же масштаб. Это не позволит получить уклоны на малых расстояниях порядка 2-20 мм. Следовательно, способ-прототип будет испытывать затруднения даже при регистрации гравитационно капиллярных волн. В отличие от прототипа в предложенном способе размывание границы поверхности на видеокадрах не происходит, поскольку время освещения каждой точки поверхности (пиксела матрицы) более чем в 100 раз меньше, чем длительность выдержки. Например, при протяженности равномерной развертки 400 мм, разрешении камеры 1 мм и диаметре луча 2 мм длительность освещения одного пиксела составит 1/200 от длительности выдержки. При частоте съемки 25 кадров в секунду и выдержке 1/40 с, время освещения пиксела составит 1/8000 с. При этом смещение поверхности раздела даже при вертикальной скорости поверхности 2 м/с не превысит 0,25 мм, а разрешение по горизонтальным координатам будет близко к размеру пиксела, т.е. 1 мм. Это позволит регистрировать не только гравитационно капиллярные волны, но и чисто капиллярные составляющие волнения.
В предложенном способе происходит выигрыш не только в пространственном разрешении, но в отношении сигнал/шум. Действительно, в прототипе лазерный луч ножевой, поэтому освещенность информационных пикселов на границе раздела пропорциональна энергии лазера, излученной за время выдержки Wиздподеленной на число освещаемых пикселов на границе раздела. При длительности выдержки равной 1/40 с и типичной скорости вертикального движения волны 0.6 м/с размытие границы составит 15 мм. Если длина ножевого луча составит 400 мм, а размер одного пиксела 1 мм2, то световая энергия, приходящаяся на пиксел на границе раздела составит Wизл/(400*15). В предложенном решении при сканировании поверхности лучом той же горизонтальной протяженности в направлении вертикали будет освещаться только один пиксел на границе раздела (смещение границы составит 0.1 мм) и световая энергия, приходящаяся на информационный пиксел на границе поверхности составит Wизл/(400*1), т.е. возрастет в 15 раз. Это повышает отношение сигнал/шум на информационных пикселах граница раздела и повышает надежность измерений, позволяет автоматизировать процесс обработки и проводить онлайн измерения параметров волнения.
При падении лазерного луча на поверхность четко визуализируются верхние точки на границе раздела, ниже которой происходит засветка за счет рассеяния луча, проникшего в воду, как на видеокадре фиг. 2, полученном в натурных условиях. При сканировании лазерным лучом вдоль некоторой траектории освещается четкая верхняя граница поверхности с размытием, не превышающим доли миллиметра. Использования интерференционных светофильтров существенно уменьшит фоновое излучение и позволит проводить измерения в любое время суток. Дополнительное использование поляризатора с вертикально направленной осью при углах падения близких к углу Брюстера, позволит убрать отраженное излучение неба и дополнительно повысить отношение сигнал шум в дневное время.
Использование сканирующего луча позволяет одновременно, с временной точностью до 1/8000 с получить значения аппликат в точках поверхности, с пространственной точностью до 1 пиксела (1 мм). По этим значением по стандартной методике определяется двумерный мгновенный уклон поверхности, усредненный на треугольнике любого масштаба. Обработка видеоряда из последовательности кадров позволяет получать двумерное распределение уклонов на масштабе выбранного треугольника от единиц миллиметров до метров.
Пример реализации способа поясняется на фиг. 1. Лазер и система развертки 1 устанавливается стационарно на выносной консоли на морской платформе на высоте 4 м над уровнем воды и направляется вниз вдоль оси Z. Частота видеокамер синхронизуется с частотой сканирования лучей. При этом на каждом i-том кадре камеры 4 будут зарегистрированы верхние границы вдоль траектории сканирования поверхности фиг. 2. Матрица видеокамеры калибруется по стандартной методике, описанной, например, в прототипе [5]. В результате для каждого i-того (i=1…N) кадра в каждой точке траектории (X ,Y), будет зарегистрирована координата верхней границы волны Zi(X, Y).
Затем, вычисляется средний уровень поверхности в каждой точке траектории (X, Y) как среднее по большому числу кадров:

1. В каждой точке траектории (X, Y) рассчитывается скорость вертикального смещения волны по формуле:
νi(X, Y)=(X, Y) - (X, Y))/2τповт где τповт - период повторения импульсов
2. По известному пространственно временному закону сканирования определяется время задержки Δtзад(Х, Y) прихода луча в точку (X, Y) по сравнению с началом сканирования.
3. «Мгновенный» профиль высоты поверхности вдоль траектории сканирования, приведенный к началу сканирования i-го кадра вычисляется по формуле
ξмгн(X, Y)=ξi(X, Y) - νi (X, Y)⋅Δtзад(Х, Y)
Имея мгновенный профиль поверхности на каждом кадре, рассчитывают уклоны поверхности между любыми двумя точками траектории сканирования или двумерные уклоны для любых трех точек траектории сканирования, не лежащими на одной прямой. Анализ серии видеокадров позволяет получить временную зависимость высот и уклонов на масштабах от единиц миллиметров до единиц метров, что позволяет рассчитать пространственные, временные и частотные характеристики волнения.
Изобретательский уровень предлагаемого изобретения подтверждается отличительной частью формулы изобретения.
Литература
1. Авторское свидетельство СССР №513250, МКИ G01C 13/00. Волнограф, А.К. Куклин. - Заявлено 23.01.1975. Опубл. 18.05.1976.
2. Сох С., Munk W. Slopes of the sea surface deduced from photographs of sun glitter, J. Optical. Soc. America, 1954, Vol. 44, No. 11, pp. 838-850.
3. Запевалов A.C. Статистические модели морской поверхности в задачах рассеяния акустического и электромагнитного излучения // Дисс.…докт. физ.-мат. наук. Севастополь: Морской гидрофизический институт НАН Украины, 2008. 290 с.
4. А. Александров, Э. Вайндруж, В. Легеза «Светолучевой многоканальных волнограф», стр. 205-209 в сб. «Неконтактные методы измерения океанографических параметров», М.: Гидрометеоиздат, 1983.
5. Караев В.Ю., Мешков Е.М. Способ определения угла наклона и высоты волнения водной поверхности относительно ее равновесного состояния. Патент РФ №2 448 324 G01C 13/00.
Реферат
Изобретение относится к области гидрометрии и океанографии и касается способа измерения высоты волнения и углов наклона водной поверхности относительно ее равновесного состояния. При осуществлении способа направляют лазерный луч по вертикали вниз, верхнюю границу засветки поверхности лазерным лучом регистрируют с помощью цифровой видеокамеры и границу засветки с учетом калибровки переводят в аппликаты волнения. Лазерный луч сканирует по поверхности по известному пространственно-временному закону с частотой видеосъемки, а мгновенный профиль поверхности вдоль траектории сканирования рассчитывают с учетом пространственно-временного закона сканирования и скорости изменения высоты поверхности в каждой точке траектории. Технический результат заключается в повышении точности измерений. 2 з.п. ф-лы, 2 ил.
Комментарии