Запорная система для дверей транспортного средства - RU2673935C2
Код документа: RU2673935C2
Чертежи


Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к защелкам для дверей автомобильных транспортных средств, более конкретно, к электромеханической запорной системе и контроллеру, который освобождает защелку только при наличии заранее заданных рабочих условий/параметров.
Уровень техники
Из уровня техники известны защелки с электрическим приводом (электрозащелки), разработанные для дверей автомобильных транспортных средств. Известные электромеханические защелки могут быть отперты путем приведения в действие электрического переключателя. Задействование этого переключателя приводит к тому, что электрический мотор сдвигает собачку с помощью в освобожденное/отпертое положение, которое позволяет лапке защелки переместиться и отцепиться от ограничителя, чтобы можно было открыть дверь транспортного средства. Электрозащелки могут иметь механический аварийный или резервный рычаг высвобождения, который может быть задействован вручную изнутри транспортного средства, чтобы отпереть электромеханическую защелку в случае ее отказа при потере питания или при возникновении других неисправностей.
Раскрытие изобретения
В одном аспекте настоящего изобретения предложена запорная система для дверей транспортного средства. Запорная система включает в себя электромеханическую защелку с приводным устройством, выполненным с возможностью высвобождать защелку. Чтобы пользователь мог отпереть защелку, внутри салона предусмотрено устройство приема команды на отпирание, такое как отпирающий переключатель, которое может быть задействовано пользователем.
Система может включать в себя контроллер, функционально соединенный с электромеханической защелкой. Контроллер может быть выполнен (т.е. запрограммирован) таким образом, чтобы не отпирать электромеханическую защелку, если скорость транспортного средства превышает заранее заданное значение, пока внутреннее отпирающее устройство не будет задействовано по крайней мере два раза в течение заранее заданного периода времени.
В дополнение к отпирающему переключателю запорная система может включать в себя устройство приема команды на разблокировку, такое как переключатель разблокировки, установленное на внутренней стороне двери транспортного средства, которое может быть задействовано пользователем для подачи запроса на разблокировку. Контроллер может обмениваться данными как с внутренним отпирающим переключателем, так и с переключателем разблокировки. Контроллер может быть выполнен с возможностью инициировать отпирание электромеханической защелки, когда в течение заранее заданного периода времени получено в общей сложности по крайней мере три отдельных команды от внутреннего отпирающего устройства и/или устройства разблокировки, в любом сочетании. По крайней мере три отдельных команды выбраны из группы, включающей в себя запрос отпирания и запрос разблокировки.
Система может включать в себя блок управления, выполненный с возможностью обнаруживать столкновение и раскрывать подушки безопасности и/или другие средств пассивной защиты пассажиров. Контроллер может быть выполнен с возможностью обмениваться данными с блоком управления посредством только одной выбранной сети цифровой передачи данных и одного или нескольких электрических проводников, проходящих между контроллером и блоком управления. Контроллер выполнен с возможностью функционировать в первом режиме, в котором для высвобождения электромеханической защелки может быть достаточным однократное задействование внутреннего отпирающего устройства, и во втором режиме, в котором для высвобождения электромеханической защелки контроллеру требуется, чтобы внутреннее отпирающее устройство было задействовано по крайней мере дважды в течение заранее заданного интервала времени. Контроллер выполнен с возможностью применять второй режим, если прервано или потеряно соединение с блоком управления.
Контроллер может быть выполнен с возможностью обмена данными с блоком управления посредством сети цифровой передачи данных и одного или нескольких электрических проводников, проходящих между контроллером и блоком управления. Контроллер может быть выполнен с возможностью функционировать в первом режиме, в котором для высвобождения электромеханической защелки может быть достаточным однократное задействование внутреннего отпирающего устройства, и во втором режиме, в котором для высвобождения электромеханической защелки контроллеру требуется, чтобы внутреннее отпирающее устройство было задействовано по крайней мере дважды в течение заранее заданного интервала времени. Контроллер применяет первый режим, если он может обмениваться данными с блоком управления с помощью сети передачи данных и/или электрических проводников. Контроллер применяет второй режим, если с помощью сети передачи данных или электрических проводников нет возможности должным образом установить соединение с блоком управления в соответствии с заранее заданными критериями.
Электромеханическая защелка может быть соединена с главным источником питания транспортного средства, а также может иметь резервный источник питания, способный подавать достаточную электрическую мощность для задействования приводного устройства, если подача электроэнергии от основного источника питания транспортного средства прервана. Контроллер может быть функционально соединен с приводным устройством. Контроллер выполнен с возможностью функционировать в первом и втором режимах. В первом режиме однократного задействования внутреннего отпирающего устройства достаточно, чтобы высвободить защелку. Во втором режиме для отпирания электромеханической защелки контроллеру требуется, чтобы внутреннее отпирающее устройство было задействовано по крайней мере дважды в течение заранее заданного интервала времени. Контроллер выполнен с возможностью применять второй режим, если подача электроэнергии от основного источника питания транспортного средства прервана.
Контроллер может быть выполнен с возможностью обмена данными с блоком управления посредством сети цифровой передачи данных и одного или нескольких электрических проводников, проходящих между контроллером и блоком управления. Контроллер может быть выполнен с возможностью функционировать в первом и втором режимах. В первом режиме для высвобождения электромеханической защелки может быть достаточно однократного задействования внутреннего отпирающего устройства. Во втором режиме для высвобождения электромеханической защелки контроллер может требовать, чтобы внутреннее отпирающее устройство было задействовано по крайней мере два раза в течение заранее заданного интервала времени. Контроллер может быть выполнен с возможностью функционировать во втором режиме, если обмен данными с блоком управления по сети цифровой передачи данных был прерван, даже если контроллер поддерживает связь с блоком управления с помощью одного или нескольких электрических проводников.
Эти и другие аспекты, цели и отличительные особенности настоящего изобретения станут понятны специалистам в данной области техники после ознакомления со следующим описанием, формулой изобретения и сопроводительными чертежами.
Краткое описание чертежей
На данных чертежах представлено следующее.
На Фиг. 1 представлено частичное схематическое изображение внутренней стороны двери транспортного средства, имеющей электромеханическую защелку в соответствии с одним аспектом настоящего изобретения.
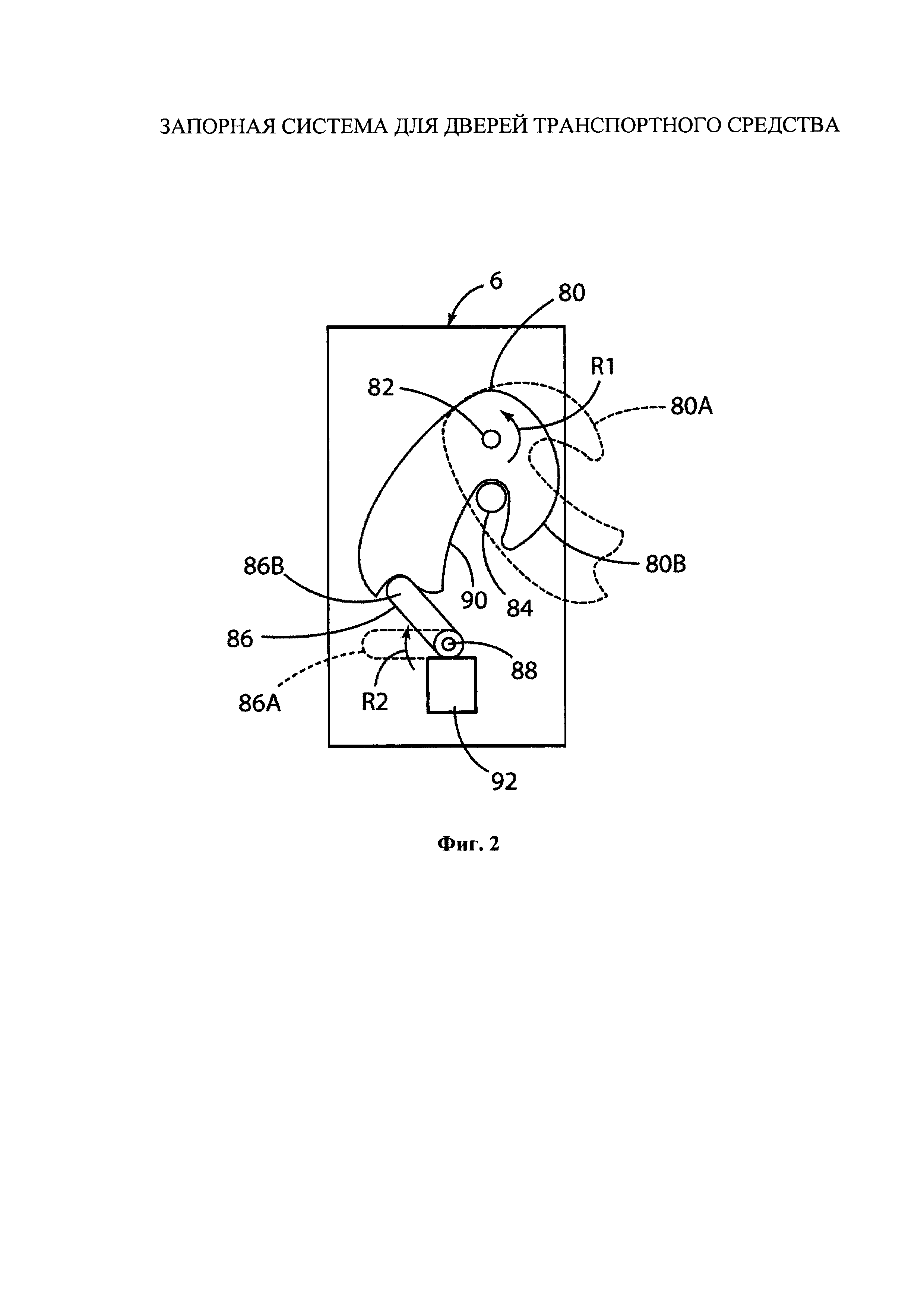
На Фиг. 2 представлено схематическое изображение электромеханической защелки.
На Фиг. 3 представлена блок-схема, изображающая запорную систему в соответствии с одним аспектом настоящего изобретения.
Осуществление изобретения
В данном тексте термины «верхний», «нижний», «правый», «левый», «задний», «передний», «вертикальный», «горизонтальный» и их производные относятся к ориентации изобретения, представленной на Фиг. 1. Однако следует понимать, что изобретение может предполагать альтернативные варианты ориентации, если не указано иное. Также следует понимать, что конкретные устройства и процессы, изображенные на сопроводительных чертежах и изложенные в следующем описании, являются иллюстративными вариантами осуществления изобретения, описанного в формуле изобретения. Таким образом, конкретные размеры и другие физические характеристики, указанные в вариантах осуществления настоящего изобретения, не должны рассматриваться как ограничения, если не указано иное.
Со ссылкой на Фиг. 1, дверь 1 имеет каркас 2, который может быть подвижно соединен с каркасом 3 транспортного средства известным способом с помощью петель 4А и 4В. Дверь 1 также может иметь защелку с электроприводом, выполненную с возможностью избирательно удерживать дверь 1 в закрытом положении. Электромеханическая защелка 6 функционально соединена с контроллером 8. Как более подробно описано ниже, контроллер 8 может представлять собой независимый блок управления, являющийся частью электромеханической защелки 6, причем транспортное средство может иметь электромеханическую защелку 6 на каждой из дверей транспортного средства. Дверь 1 также может иметь внутреннее отпирающее устройство (принимающее команды от пользователя), такое как отпирающий переключатель 12, функционально соединенное с контроллером 8. На практике пользователь использует внутреннее отпирающее устройство 12 для создания запроса отпирания для контроллера 8. Как также более подробно описано далее, если защелка 6 отперта и/или присутствуют определенные заранее заданные рабочие параметры или условия, контроллер 8 генерирует сигнал, приводящий к отпиранию электромеханической защелки 6 внутренним отпирающим устройством 12. Дверь 1 также может содержать устройство разблокировки, например, разблокирующий переключатель 14, прикрепленный к двери 1. Разблокирующий переключатель 14 функционально соединен с контроллером 8. Контроллер 8 может быть выполнен с возможностью сохранения заблокированного или разблокированного состояния двери или защелки, которое может быть изменено с помощью разблокирующего переключателя 14. Контроллер 8 может быть выполнен (т.е. запрограммирован) с возможностью отклонять запрос отпирания, поданный с помощью внутреннего отпирающего устройства 12, если контроллер 8 определит, что электромеханическая защелка 6 находится в заблокированном состоянии. Контроллер 8 предпочтительно представляет собой программируемый контроллер, который может быть выполнен с возможностью высвобождения электромеханической защелки 6 в соответствии с рабочей логикой, заранее заданной при программировании контроллера 8. Однако контроллер 8 может содержать электрические цепи и компоненты, которые выполнены с возможностью обеспечения необходимой рабочей логики.
Обращаясь теперь к Фиг. 2, электромеханическая защелка 6 может включать в себя лапку 80, которая шарнирно поворачивается вокруг стержня 82, и собачку 86, которая установлена с возможностью поворота вокруг стержня 88. Собачка 86 может перемещаться между расцепленным или отпертым положением 86А и запертой или зацепленной конфигурацией или положением 86В. Лапка 80 смещается пружиной в сторону выдвинутого положения 80A. На практике, когда дверь 1 открыта, лапка 80 обычно находится в выдвинутом положении 80А. Когда дверь 1 закрыта, поверхность 90 лапки 80 приходит в контакт с ограничителем 84, установленным на транспортном средстве. Контакт между ограничителем 84 и поверхностью 90 лапки 80 приводит к повороту лапки 80 вокруг стержня 82 в направлении стрелки R1, пока лапка 80 не достигнет закрытого положения 80В. Когда лапка 80 находится в закрытом положении 80В, а собачка 86 - в зацепленном положении 86В, собачка 86 не дает лапке 80 повернуться в открытое положение 80А, тем самым предотвращая открывание двери 1. Под действием пружины или аналогичного механизма лапка 80 может быть смещена и повернута в направлении, противоположном направлению стрелки R1, таким образом, если собачка 86 не находится в зацепленном положении 86В, то лапка 80 поворачивается в открытое положение 80А. Собачка 86 может быть смещена пружиной или аналогичным механизмом в направлении стрелки R2 таким образом, чтобы собачка 86 поворачивалась в зацепленное положение 86В при повороте лапки 80 в закрытое положение 80В, когда ограничитель 84 зацепляется с лапкой 80 после закрывания двери 1. Защелка 6 может быть отперта путем поворота собачки 86 в направлении, противоположном стрелке R2, чтобы разрешить поворот лапки 80 из закрытого положения 80В в открытое положение 80А. С собачкой 86 может быть функционально соединено приводное устройство, например, электрический мотор 92, который поворачивает собачку 86 в расцепленное или отпертое положение 86А. Контроллер 30 может отпирать защелку 6 в отпертую конфигурацию или состояние, инициируя поворот собачки 86 приводом 92 из запертого или зацепленного положения 86В в отпертую конфигурацию или положение 86А. Однако следует понимать, что в соответствии с настоящим изобретением могут быть использованы различные типы электромеханических защелок, а электромеханическая защелка 6 не обязательно должна содержать лапку 80 и собачку 86, изображенные на Фиг. 2. Например, привод 92 может быть функционально взаимно соединен с лапкой 80, используя механическое устройство, отличное от собачки 86, для передвигания электромеханической защелки 6 между запертым и открытым состояниями. В общем случае дверь 1 может быть открыта, если электромеханическая защелка 6 находится в отпертом состоянии, а если защелка 6 находится в запертом состоянии или конфигурации, она будет удерживать дверь 1 транспортного средства в закрытом состоянии или конфигурации.
Со ссылкой теперь на Фиг. 3, электромеханическая запорная система 25 включает в себя переднюю электромеханическую защелку 6А со стороны водителя, переднюю электромеханическую защелку 6В со стороны пассажира, заднюю электромеханическую защелку 6С со стороны пассажира и заднюю электромеханическую защелку 6D со стороны пассажира. Электромеханические защелки 6A - 6D избирательно фиксируют в закрытом положении передние и задние двери со стороны водителя и пассажира, соответственно. Каждая электромеханическая защелка 6A - 6D может включать в себя контроллер 16A - 16D, соответственно, который соединен со среднескоростной сетью передачи данных 18, включая сетевые линии 18А 18D. Контроллеры 16A - 16D предпочтительно являются программируемыми контроллерами, но также могут включать в себя электрические цепи, которые обеспечивают необходимую рабочую логику. Сеть передачи данных 18 может включать в себя среднескоростную локальную сеть контроллеров (MS-CAN), работающую в соответствии с известными промышленными стандартами. Сеть передачи данных 18 обеспечивает обмен данными между контроллерами 16A - 16D и шлюзом 20 цифрового логического контроллера. Шлюз 20 цифрового логического контроллера функционально соединен с первой сетью 22 передачи данных и второй сетью 24 передачи данных. Первая сеть 22 может являться первой высокоскоростной локальной сетью контроллеров (HS1-CAN), а вторая сеть 24 может являться второй высокоскоростной локальной сетью контроллеров (HS2-CAN). Сети 22 и 24 могут работать в соответствии с известными промышленными стандартами. Первая сеть 22 соединена с кластером 26 приборной панели (IPC), модулем 28 управления системой пассивной безопасности (RCM) и модулем 30 управления питанием (РСМ). Модуль RCM 28 с помощью данных от датчиков ускорения определяет, что произошло столкновение. Модуль RCM 28 может быть выполнен с возможностью активации средств пассивной безопасности пассажиров и/или отключения подачи топлива в транспортном средстве при обнаружении столкновения. Первая высокоскоростная сеть 22 также может быть соединена с дисплейным экраном 32, который может быть расположен в салоне транспортного средства для предоставления визуальной информации пассажирам и водителю транспортного средства. Вторая высокоскоростная сеть 24 функционально соединена с устройством 34 антиблокировочной тормозной системы, которое включает в себя датчики для измерения скорости движения транспортного средства.
Система 25 также включает в себя блок 40 управления кузовными электронными системами, который соединен с первой высокоскоростной сетью 22 передачи данных. Блок 40 также функционально соединен с электромеханическими защелками 6A - 6D при помощи линий 36A - 36D передачи данных. Контроллеры 16A - 16D могут быть также непосредственно соединены (иметь кабельное соединение) с блоком 40 с помощью электрических проводников, например, проводов 56A - 56D соответственно. Провода 56A - 56D могут обеспечивать резервное соединение для передачи данных между контроллерами 16A - 16D и контроллером 40, или же провода 56A - 56D могут обеспечивать только соединение для передачи данных между контроллерами 16A - 16D и контроллером 40. Блок 40 также может быть функционально взаимно соединен с датчиками (не показаны), которые отправляют в блок 40 управления сигнал в случае, если двери транспортного средства неплотно закрыты. Блок 40 управления также соединен с основным источником питания транспортного средства, например, с аккумулятором 48. Каждая электромеханическая защелка 6A - 6D может быть соединена с основным источником питания 48 транспортного средства с помощью коннекторов 50A - 50D. Электромеханические защелки 6A - 6D также могут иметь резервные источники питания 52, которые могут быть применены для задействования приводного устройства 92 в случае прерывания или потери подачи питания от основного источника питания 48 транспортного средства. Резервные источники питания 52 могут содержать конденсаторы, аккумуляторы или другие устройства аккумулирования электрической энергии. В целом, резервные источники питания 52 аккумулируют достаточно электрической энергии, чтобы обеспечить временную работу контроллеров 16A - 16D и привести в действие приводные устройства 92 несколько раз для того, чтобы позволить отпереть двери транспортного средства в случае неисправности или отключения основного источника питания/аккумулятора 48.
Каждая электромеханическая защелка 6A - 6D также функционально соединена с внутренним отпирающим переключателем 12A - 12D, соответственно, который передает входные сигналы от пользователя (запросы отпирания). Электромеханические защелки 6A - 6D также функционально соединены с внешними отпирающими переключателями 54A - 54D, соответственно. Контроллеры 16A - 16D также функционально соединены с разблокирующими переключателями 14 (Фиг. 1). Контроллеры 16A - 16D могут быть выполнены с возможностью сохранять статус блокировки («Заблокировано» или «Разблокировано») и использовать статус блокировки для управления электромеханическими защелками 6A - 6D, как показано далее в таблицах 1 и 2.
Контроллер 40 и индивидуальные контроллеры 16A - 16D могут быть выполнены с возможностью открывать электромеханические защелки на основании различных входных сигналов от пользователя и рабочих параметров транспортного средства, как показано в таблице 1:
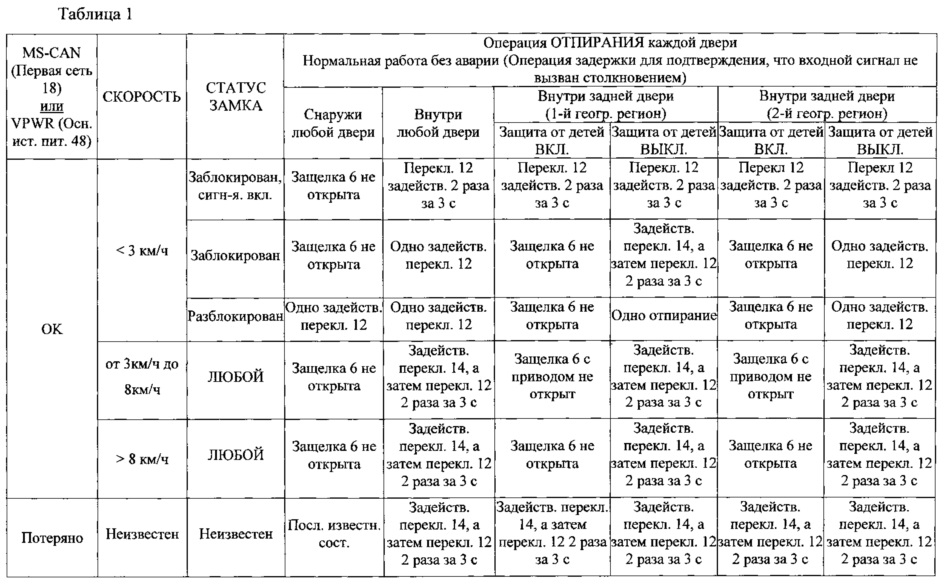

Как показано в таблицах 1 и 2, контроллеры 16А - 16С и/или блок управления 40 могут быть выполнены с возможностью (например, запрограммированы) управления отпиранием электромеханических защелок 6A - 6D в соответствии с различными критериями в зависимости от различных географических зон. Кроме того, блок управления может быть выполнен с возможностью управлять характеристиками отпирания различным образом, когда имеет место столкновение и в нормальных (безаварийных) условиях. В таблице 1 представлен пример характеристик отпирания в нормальных (безаварийных) условиях, а в таблице 2 представлен пример поведения в ситуации столкновения. Контроллеры 16А - 16С и/или блок управления 40 могут быть выполнены с возможностью определять ситуацию столкновения путем отслеживания сети передачи данных на наличие сигнала о столкновении от модуля RCM 28 и/или отслеживания различных других прямых входных сигналов от модуля RCM 28. Как описано далее, модуль RCM 28 может быть выполнен с возможностью обнаруживать, что произошло столкновение, и генерировать один или несколько сигналов о столкновении, которые могут быть переданы в контроллеры 16А - 16С защелок и/или блок управления 40. Если наличие столкновение было распознано, контроллер 16А - 16С и/или блок управления 40 также может запускать таймер и запрещать любое отпирание в течение заранее заданного интервала времени (например, 3 секунд) до возобновления работы в аварийном режиме (логика управления или рабочий режим), описанном в таблице 2.
Контроллеры 16A - 16D и/или блок управления 40 могут быть выполнены с возможностью перехода в первый рабочий режим, в котором электромеханические защелки 6A - 6D отпираются, если однократно задействовать внутренний отпирающий переключатель 12. Система также может иметь второй рабочий режим. Если система находится во втором рабочем режиме, то внутренний отпирающий переключатель 12 должен быть использован по крайней мере дважды в течение заранее заданного периода времени (например, 3 секунд). Например, этот рабочий режим может быть применен, если транспортное средство заперто и активирована система безопасности транспортного средства.
Как было сказано выше, блок управления 40 может быть функционально соединен с контроллерами 16A - 16D с помощью сети 18 передачи данных и/или линий 36A - 36D передачи данных. Блок управления 40 также может быть функционально соединен с контроллерами 16A - 16D с помощью проводных линий 56A - 56D. Система 25 также может быть сконфигурирована таким образом, что блок управления 40 соединен с контроллерами 16A - 16D только с помощью сети 18, только с помощью линий 36A - 36D или только с помощью проводов 38A - 38D.
Во время нормальной работы или при наличии различных неисправностей в работе транспортного средства система 25 также может управлять электромеханическими защелками 6A - 6D на основании различных рабочих параметров и/или неисправностей в электрической системе транспортного средства, сети передачи данных, кабельных линиях и других подобных параметров или событий.
Например, во время нормальной работы система 25 может быть отпирать электромеханические защелки 6A - 6D, если внутренний отпирающий переключатель 12 задействован по крайней мере один раз при движении транспортного средства со скоростью менее 3 км/ч или другой заранее заданной скоростью. Скорость может быть определена с помощью соответствующих датчиков (например, датчиков модуля ABS 34). Если транспортное средство движется со скоростью 3 км/ч или медленнее, то электромеханические защелки 6A - 6D могут быть также отперты, если внешний отпирающий переключатель 54, будучи в разблокированном состоянии, использован один или несколько раз. Однако контроллеры 16А - 16D могут быть выполнены таким образом, что при скорости движения транспортного средства выше 3 км/ч защелки 6A - 6D не могут быть отперты при использовании внешних отпирающих переключателей 54A - 54D. Аналогичным образом при скорости движения транспортного средства менее 3 км/ч и в заблокированном состоянии система 25 может отпирать электромеханические защелки 6A - 6D, если внутренние отпирающие переключатели 12A - 12D использованы по крайней мере два раза в течение заранее заданного интервала времени (например, 3 секунд).
Система 25 может иметь функцию подавления дребезга контактов внутренних отпирающих переключателей 12A - 12D (ложного срабатывания) и/или внешних отпирающих переключателей 54A - 54D в течение первого интервала времени (например, 35 мс) в условиях нормальной работы транспортного средства. Однако функция подавления дребезга может выполняться и в течение более длительных временных промежутков (100-150 мс), если транспортное средство имеет включенную передачу (например, блок 30 управления питанием генерирует сигнал о том, что рычаг переключения передач транспортного средства находится в каком-либо другом положении, кроме положений «парковка» или «нейтраль»).
Кроме того, система 25 может, например, в аварийной ситуации, отпирать электромеханические защелки 6A - 6D на основании нескольких входных сигналов от внутреннего отпирающего переключателя 12 и/или внутреннего разблокирующего переключателя 14. В частности, контроллеры 16A - 16D могут обеспечивать режим трех входных сигналов и отпирать электромеханические защелки 6A - 6D, если в течение заранее заданного периода времени (например, 3 секунд или 5 секунд) от внутренних отпирающих переключателей 12A - 12D и внутренних разблокирующих переключателей 14A - 14D получены три отдельных входных сигнала в любой последовательности. Например, контроллеры 16A - 16D могут быть выполнены таким образом, что трехкратное задействование внутреннего отпирающего переключателя 12 или трехкратное задействование разблокирующего переключателя 14 в течение заранее заданного периода времени приводит к отпиранию электромеханических защелок 6A - 6D. Кроме того, задействование разблокирующего переключателя 14 с последующим двукратным задействованием отпирающего переключателя 12 в течение заранее заданного периода времени могут быть использованы в качестве сочетания входных сигналов, которое приводит к отпиранию электромеханических защелок 6A - 6D. Аналогичным образом двукратное задействование отпирающего переключателя 12 с последующим однократным задействованием разблокирующего переключателя 14 в течение заранее заданного периода времени могут быть использованы в качестве входного сигнала, который приводит к отпиранию электромеханических защелок 6A - 6D. Кроме того, двукратное задействование разблокирующего переключателя 14 с последующим однократным задействованием внутреннего отпирающего переключателя 12 могут быть использованы в качестве сочетания входных сигналов, которое приводит к отпиранию электромеханических защелок 6A - 6D. Таким образом, три входных сигнала от отпирающего переключателя 12 и/или разблокирующего переключателя 14 в любом сочетании или последовательности в течение заранее заданного периода времени могут быть использованы системой 25 для открывания электромеханических защелок 6A - 6D. Данная схема управления предотвращает нежелательное отпирание электромеханических защелок 6A - 6D, а также дает возможность пользователю, находящемуся под давлением, открыть двери при подаче трех отдельных сигналов в любой последовательности или сочетании. Кроме того, система 25 может быть выполнена таким образом, чтобы режим трех входных сигналов был активным только при наличии определенных условий. Например, система 25 (т.е. контроллеры 16A - 16D) может переходить в режим трех входных сигналов при наличии аварийной ситуации и/или при потере соединения с сетью, как обнаружено контроллерами 16A - 16D.
Если система 25 включает в себя только соединения 36A - 36D сети передачи данных или только кабельные линии 56A - 56D, то контроллеры 16A - 16D могут потребовать многократного задействования внутреннего отпирающего переключателя 12 при потере сетевого соединения или кабельного соединения с модулем RCM 28. Если контроллеры 16A - 16D не могут обмениваться данными с модулем RCM 28, то контроллеры 16A - 16D не «знают» статус модуля RCM 28, т.е. контроллеры 16A - 16D не могут «знать», произошло ли столкновение или отсечка подачи топлива. Следовательно, контроллеры 16A - 16D могут быть запрограммированы так, что по умолчанию требуют многократного задействования внутренних отпирающих переключателей 12A - 12D в случае потери соединения с модулем RCM 28 (или другими компонентами) для предотвращения нежелательного отпирания электромеханических защелок 6A - 6D при столкновении, которое не было обнаружено системой из-за потери соединения с модулем RCM 28. Аналогичным образом при потере сетевого соединения контроллеры 16A - 16D будут не способны «узнать» скорость транспортного средства и могут по умолчанию использовать последнее известное значение скорости транспортного средства. В качестве альтернативы в контроллерах 16A - 16D может быть по умолчанию принято, что при потере сетевого соединения скорость транспортного средства составляет менее 3 км/ч. Это может быть применено при таких режимах отпирания, при которых обрабатывают входные сигналы от внешних отпирающих переключателей 54A - 54D и/или внутренних переключателей. Следует понимать, что контроллеры 16A - 16D могут определять, что сетевое соединение «потеряно» для целей управления работой защелки на основании заранее заданных критериев (например, нестабильное соединение передачи данных), что необязательно соответствует полной потере сетевого соединения.
Аналогичным образом, если система 25 включает в себя сетевое соединение 36A - 36D и кабельные линии 56A - 56D, то контроллеры 16A - 16D могут быть по умолчанию запрограммированы на режим, требующий многократного задействования внутреннего отпирающего переключателя 12 в случае прерывания или потери соединения передачи данных и проводного соединения. Однако если соединение передачи данных и кабельное соединение остаются в исправном состоянии, то контроллеры 16A - 16D могут потребовать только однократного задействования внутреннего отпирающего переключателя 12 при условии, что известно, что скорость и другие рабочие параметры транспортного средства находятся ниже заранее заданных максимально допустимых значений, что в противном случае приведет к требованию о многократном задействовании внутренних отпирающих переключателей 12А - 12D.
Кроме того, контроллеры 16A - 16D могут быть запрограммированы так, что по умолчанию используется режим, требующий многократного задействования внутренних отпирающих переключателей 12A - 12D в случае прерывания подачи питания на защелки 6A - 6D от основного источника питания 48 транспортного средства, даже если сетевое соединение с модулем RCM 28 осталось исправным. Это может быть выполнено для того, чтобы сэкономить резервные источники питания 52A - 52D. В частности, непрерывное отслеживание сети передачи данных контроллерами 16A - 16D приведет к постепенному разряду резервных источников питания 52A - 52D, и, следовательно, контроллеры 16A - 16D могут прекратить отслеживать данные от линий 36A - 36D передачи данных и/или сети 18, в случае потери подачи питания от основного источника питания 48 транспортного средства. Поскольку контроллеры 16A - 16D прекращают отслеживание передачи данных в случае неисправности основного источника питания 48, индивидуальные контроллеры 16A - 16D не могут определить, произошло ли столкновение (т.е. контроллеры 16A - 16D не получают данные от модуля RCM 28), и, следовательно, контроллеры 16A - 16D по умолчанию требуют многократного задействования внутренних отпирающих переключателей 12A - 12D для предотвращения нежелательного отпирания защелок 6A - 6D при столкновении, которое не было обнаружено контроллерами 16A - 16D. Кроме того, в данных случаях контроллеры 16A - 16D будут также не способны определить скорость транспортного средства и могут быть по умолчанию выполнены (запрограммированы) с возможностью использования последнего известного достоверного значения скорости транспортного средства. В качестве альтернативы в контроллерах 16A - 16D может быть по умолчанию принято, что скорость транспортного средства меньше заранее заданного значения (например, 3 км/ч). Данные настройки по умолчанию/допущения могут быть применены в режиме выполнения отпирания, при обработке входных сигналов от внешних отпирающих переключателей 54A - 54D и/или внутренних переключателей 12A - 12D.
Кроме того, система может по умолчанию требовать многократного задействования внутренних отпирающих переключателей 12A - 12D в случае потери соединения в сети передачи данных (сети 18 и/или линиях 36A - 36D передачи данных) между контроллерами 16A - 16D и модулем RCM 28. В частности, даже если кабельные линии 56A - 56D остаются исправными, скорость передачи данных по кабельным линиям 56A - 56D значительно меньше, чем скорость передачи данных по сети 18 и линиям 36A - 36D, и если данные о столкновении могут быть переданы только по кабельным линиям 38A - 38D, контроллеры 16A - 16D могут не получить данные о столкновении от модуля RCM 28 достаточно быстро, чтобы перейти в режим требования многократного задействования внутренних отпирающих переключателей 12A - 12D. Таким образом, переход по умолчанию в режим требования многократного задействования внутренних отпирающих переключателей 12A - 12D в случае проблем при передаче данных (сети 18 и/или линий 36А - 36D), даже если проводные линии связи остаются исправными, предотвращает нежелательное отпирание электромеханических защелок 6А - 6D в случае столкновения, которое обнаружено контроллерами 16A - 16D только после задержки, вызванной более медленной скоростью передачи данных. Аналогичным образом в случаях, когда контроллеры 16A - 16D не осуществляют обмен данными по сети передачи данных, они будут также не способны получить информацию о скорости транспортного средства, и по умолчанию будут использовать последнее известное достоверное значение скорости транспортного средства. В качестве альтернативы в контроллерах 16A - 16D может быть по умолчанию принято, что скорость транспортного средства составляет менее заранее заданного значения (например, 3 км/ч). Такие настройки по умолчанию/допущения могут быть применены в режиме отпирания при обработке входных сигналов от внешних отпирающих переключателей 54A - 54D и/или внутренних переключателей 12A - 12D.
Следует понимать, что в описанную выше конструкцию могут быть внесены различные вариации и модификации без отступления от сущности настоящего изобретения, которая определена следующей формулой изобретения, если явно не указано иное.
Реферат
Группа изобретений относится к вариантам запорной системы для дверей транспортного средства. Запорная система включает в себя электромеханическую защелку с приводным устройством, выполненным с возможностью отпирать защелку. Внутреннее отпирающее устройство, такое как отпирающий переключатель, может быть задействован пользователем для подачи запроса отпирания. Система может включать в себя контроллер, функционально соединенный с приводным устройством защелки. Контроллер выполнен таким образом, чтобы не отпирать защелку, если скорость транспортного средства превышает заранее заданное значение, пока внутреннее устройство разблокировки не будет задействовано по крайней мере два раза в соответствии с заранее заданными критериями. Обеспечивается повышение безопасности. 7 н. и 13 з.п. ф-лы, 3 ил., 2 табл.
Комментарии