Устройство для объемного стереоскопического 3d-мониторинга монокулярными оптико-электронными приборами с дистанционно-пилотируемых летательных аппаратов - RU179137U1
Код документа: RU179137U1
Чертежи

Описание
Полезная модель относится к оптико-электронным приборам (ОЭП), а конкретно - к ОЭП дистанционно-пилотируемым летательным аппаратам (ДПЛА).
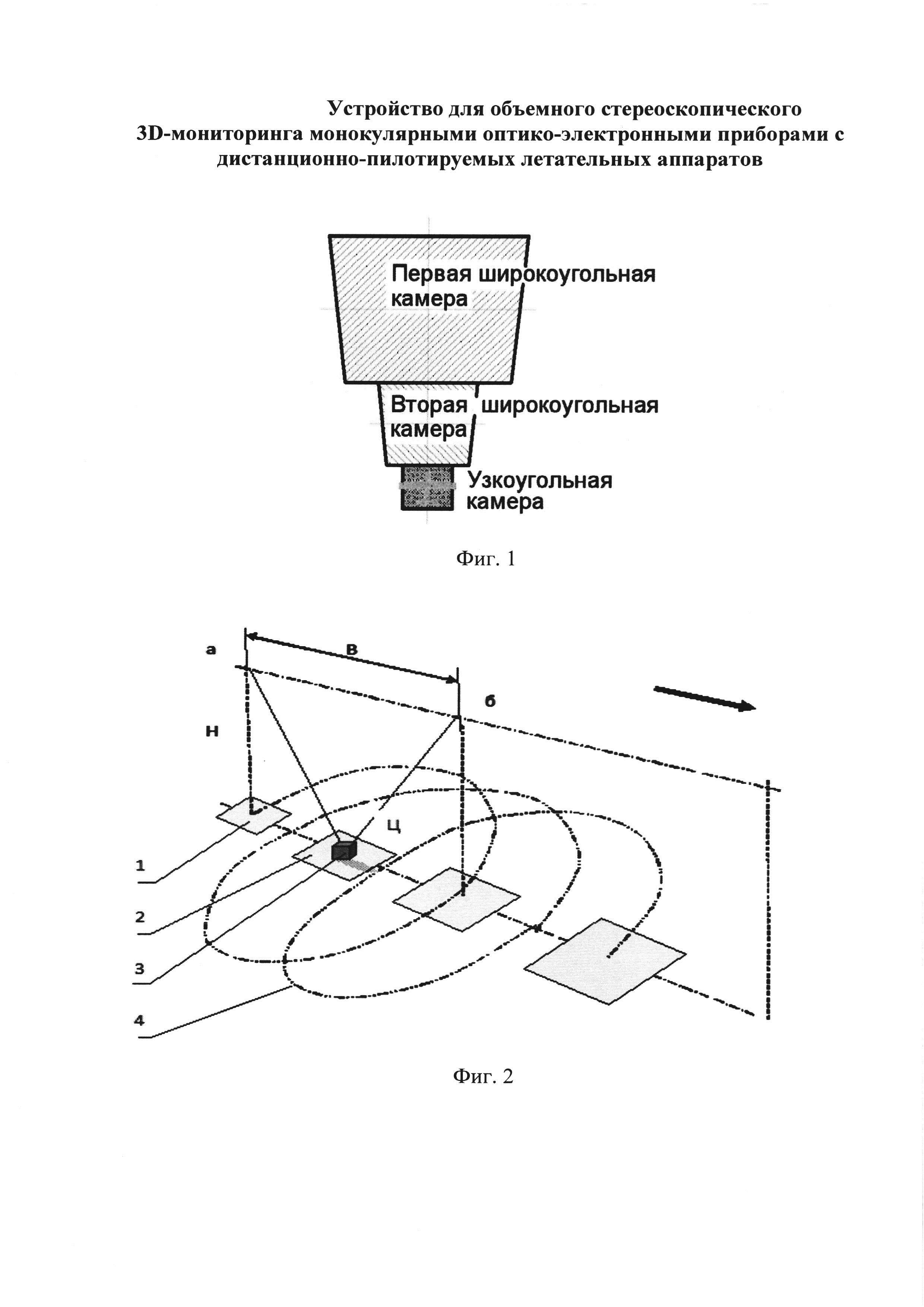
В настоящее время применение ДПЛА позволяет выполнять поиск и обнаружения цели, корректировку огня по ней и контроль результатов поражения цели в едином технологическом цикле. В зависимости от решаемых боевых задач ДПЛА в процессе поиска и сопровождения цели ДПЛА совершает полет в соответствии с одним из методов поиска цели приведенных в статье [1]. Широкий диапазон задач разведки требует применения широкого диапазона методов и, реализующих их, различных типов оптико-электронных (визуальных) приборов (ОЭП). Например, панкратический метод на основе трала Чистякова, реализуемый тремя телевизионными камерами с различными полями зрения и увеличения схема которого представлена на фиг. 1 [2]. Основная идея метода "Трала Чистякова" - использование движения ДПЛА как по курсу, так и по траектории для более подробного рассмотрения цели.
Основными недостатками системы мониторинга с ДПЛА являются:
- использование значительного количества разнотипных ОЭП, что увеличивает суммарную массу полезной нагрузки и суммарную стоимость ДПЛА;
- получение плоского изображения объекта при использовании для ведения разведки малогабаритных ДПЛА т.к. реализацию стереоскопического (объемного) метода наблюдения ограничивают размеры стереоскопической базы наблюдения (приборного отсека МДПЛА) [3].
Известны устройства разведки объектов методом комбинированного стереоэффекта [4, 5, 6, 7, 8]. Но рассматриваемые в данных работах устройства не могут быть установлены на ДПЛА.
С целью снижения количества разнотипных ОЭП в системе мониторинга объектов с ДПЛА используемых для создания стереоскопического изображения предлагается устройство для объемного стереоскопического 3D-мониторинга монокулярными ОЭП с ДПЛА.
Поиск объектов монокулярным ОЭП с ДПЛА осуществляется линейно по траектории полета или путем изменения углов наклона линии визирования. При движении ДПЛА по траектории полета линия визирования имеет вид, приведенный на фиг. 2. На фиг. 2 обозначено: 1 - плановый снимок; 2 - перспективный снимок; 3 - объект наблюдения; 4 - траектория сканирования поля зрения прибора. Для создания стереоизображения объекта необходимо перспективное изображение объекта С, зафиксированное монокулярным ОЭП при движении ДПЛА по траектории с точки А, сохранить в памяти ЭВМ с определенной задержкой и подавать его для одновременного наблюдения с изображением объекта С, зафиксированного с точки В.
Устройство для объемного стереоскопического 3D-мониторинга монокулярными ОЭП с ДПЛА производит регистрацию изображений объекта в перспективной проекции с разных точек траектории полета ДПЛА и их последующего одновременного наблюдения для создания прямого (ортоскопического), обратного (псевдоскопического) или комбинированного стереоскопического наблюдения. Функциональная схема устройства приведена на фиг. 3. Устройство для объемного стереоскопического 3D-мониторинга монокулярными ОЭП с ДПЛА состоит из монокулярного ОЭП 1, матрицы приборов с зарядовой связью (ПЗС) 2, электронного блока предварительной обработки изображений 3, процессора анализа и обработки изображений 4, канала вывода информации на устройство обработки и представления информации 5.
Устройство функционирует следующим образом. Изображения объекта С зафиксированное монокулярным ОЭП 1 на разных точках полета ДПЛА (фиг. 2 точки А и В - представляющих стереоскопическую базу наблюдения) подаются на матрицу ПЗС 2, в которой изображения преобразуются в цифровой вид и поступают в электронный блок предварительной обработки изображений 3, проводится анализ цифрового вида каждого изображения и наложение цифрового изображения объекта на предыдущее с временной задержкой, определяемой величиной стереоскопической базы по известной скорости ДПЛА, при этом дальнейшее определение характеристик объекта выполняется с помощью процессора анализа и обработки изображений 4 осуществляющего передачу данных об объекте по каналу передачи данных на устройство обработки и представления информации 5 (компьютер и т.д.).
Расстояние между точками визирования определяет величину базы стереоскопического наблюдения, которое значительно больше размеров приборной камеры МДПЛА. При смене зафиксированных изображений объекта с разных точек на противоположное может быть достигнут обратный (псевдоскопический) стереоэффект.
Предлагаемое устройство может быть реализовано на серийно выпускаемых оптических деталях и радиокомпонентах [9, 10, 11].
Таким образом, устройство для объемного стереоскопического 3D-мониторинга монокулярными ОЭП с ДПЛА позволяет снизить количество разнотипных ОЭП и использовать при мониторинге объектов ОЭП с МДПЛА, кроме штатных режимов наблюдения (прямого монокулярного - планового или перспективного) использовать и стереоскопическое наблюдение.
Последующее применение современных 3D-технологий к обработке информации позволяет повысить эффективность разведки (обнаружения, распознавания и дальнометрирования объектов) ОЭП при пассивном (скрытном) наблюдении с использованием методов стереонаблюдения с ДПЛА [12].
Источники информации
1. Ростопчин В.В. Элементарные основы оценки эффективности применения беспилотных авиационных систем для воздушной разведки. http://dpla.ru/otklikrostopchin.htm.
2. Чистяков Н.В. Трал Чистякова - телевизионная разведывательная аппаратура легкая (ТРАЛ). http://novik-xxi.narod.ru/maks/TralCh.htm.
3. Пархоменко, А.В. и др. Построение и расчет перспективных оптико-электронных приборов [Текст]: /. Учебное пособие. / А.В. Пархоменко, А.Г. Дмитриенко, А.В., Блинов, В.П. Фандеев, Р.А. Тюков. / под общ. ред. А.В. Пархоменко. - Пенза: ВУНЦ СВ «ОВА ВС РФ» (фил.), 2012. - 358 с.
4. Пархоменко А.В. и др. Устройство разведки объектов методом комбинированного стереоэффекта. - ФИПС. Патент на полезную модель №84539 по заявке на изобретение №2008152592 от 29.12.2008. Опубл. 10.07.2009. Бюл. №19.
5. Пархоменко А.В., и др. Устройство разведки объектов методом анаглифов. - ФИПС. Патент на полезную модель №86295 от 27.9.09 по заявке №№2008152594 от 29.12. 2008. Опубл. 27.9.09. Бюл. №24
6. Пархоменко А.В., Шишков С.В. и др. Нашлемная разведывательная система пассивного дальнометрирования объектов. - ФИПС. Решение о выдаче патента на изобретение от 7.07.08 г. по заявке №2007103759/02 (004047) от 31.01.07.
7. Пархоменко А.В. и др. Насадка к оптико-электронным приборам для визирования объектов при больших углах места. - ФИПС. Патент на полезную модель №83603 по заявке на изобретение №2008152593/22 от 29.12.2008. Опубл. 10.06.2009. Бюл. №16.
8. Пархоменко А.В. и др. Система пассивного дальнометрирования объектов в управляемых боеприпасах. - ФИПС. Патент на изобретение №2295103 от 10.03.07 по заявке №2004311117 от 25.10.2004. Опубл. 10.03.2007. Бюл. №7.
9. Каталог. Датчики, преобразователи и системы. - Пенза.: ФГУП «НИИ физических измерений».2007. - 191 с.
10. Профессиональная оптика для видеонаблюдения и технического зрения. Оптические трансфокаторы и варифокальные объективы КОВА. Каталог. Компания «Kowa-Europe GmbH». - СПб. Бик-информ. 2010. - 12 с.
11. Объективы для технического зрения. Каталог. Компания «Kowa-Europe GmbH». - СПб. Бик-информ. 2010. - 23 с. http://www.kowa-usa.com.
12. Пат. на полезную модель №162916, Российская Федерация, F16G 1/00. Устройство распознавания пространственного положения объекта и определения установок стрельбы по «уязвимым местам» / Епифанов А.И., Пархоменко А.В.; заявл. 02.06.15; опубл. 27.06.16 г. Бюл. №18.
Реферат
Полезная модель относится к оптико-электронным приборам (ОЭП) дистанционно-пилотируемых летательных аппаратов (ДПЛА). Устройство для объемного стереоскопического 3D-мониторинга монокулярными ОЭП с ДПЛА, состоит из монокулярного ОЭП, матрицы ПЗС, электронного блока предварительной обработки изображений, процессора анализа и обработки изображений, канала вывода информации на устройство обработки и представления информации. Для создания объемного стереоскопического 3D-изображения объекта используется фиксация изображения объекта с различных точек траектории ДПЛА, представляющей стереоскопическую базу наблюдения, при этом изображения объекта, зафиксированные монокулярным ОЭП на разных точках траектории движении ДПЛА, подаются на матрицу ПЗС, в которой изображения преобразуются в цифровой вид и поступают в электронный блок предварительной обработки изображений, где проводится анализ цифрового вида каждого изображения и наложение цифрового изображения объекта на предыдущее с временной задержкой, определяемой величиной стереоскопической базы по известной скорости ДПЛА. Дальнейшее определение характеристик объекта выполняется с помощью процессора анализа и обработки изображений, осуществляющего передачу данных об объекте по каналу передачи данных на устройство обработки и представления информации. Технический результат заключается в обеспечении возможности установки устройства разведки методом комбинированного стереоэффекта на ДПЛА. 3 ил.
Комментарии