Способ управления подъемным краном - RU2574047C2
Код документа: RU2574047C2
Чертежи





















Описание
Область техники
Настоящее изобретение относится к подъемным кранам, в частности, к использованию результатов измерения угла отклонения троса для управления подъемным краном.
Уровень техники
Подъемные краны представляют собой устройства, предназначенные для переноса грузов, как на открытом воздухе, так и в закрытых помещениях. На производственных предприятиях подъемный кран, как правило, представляет собой мостовой кран, установленный с возможностью движения вдоль рельсов посредством моста, движущегося в направлении указанных рельсов, причем на указанных рельсах установлена одна или несколько тележек, перемещающихся вдоль моста в направлении, по существу перпендикулярном направлению рельсов. При этом указанные тележки оснащены одним или несколькими тросами или соответствующими подъемными средствами, например, ремнями и цепями. В идеале каждый трос расположен вертикально или почти вертикально так, что груз находится непосредственно под тележкой. На практике же бывает, что тросы отклоняются от вертикали, в результате чего возникает необходимость в определении фактического угла отклонения троса, то есть, в определении того, насколько трос отклонился от вертикали.
Из уровня техники известно несколько способов определения угла отклонения груза. Как правило, в таких способах угол отклонения измеряют в направлении вверх, то есть, от подъемного элемента, например, крюка в направлении тележки. В частности, в публикации JP 9-156878 раскрыто техническое решение, согласно которому на тросовую подвеску крана рядом с крюком или другим подъемным средством устанавливают волоконно-оптический гироскоп для измерения угла отклонения подвешенного груза. В публикации DE 10008235 раскрыто техническое решение, согласно которому для измерения угла отклонения груза используют акселерометры, установленные на крюк, при этом выходной сигнал акселерометра умножают на величину поправки, соответствующую обратной величине земного ускорения. В техническом решении, известном из публикации DE 4238795, крюк может быть оснащен группой из трех акселерометров, или гироскопом или инклинометром при условии, что гироскопы и инклинометры имеют соответствующую точность для определения угла отклонения. В статье «Управление контейнерными кранами с защитой от раскачивания: инклинометр, устройство наблюдения и обратная связь по состоянию» («Anti-Sway Control of Container Cranes: Inclinometer, Observer and State Feedback)), Yong-Seok Kim, Keum Shik Hong, Seung-Ki Sul, International Journal of Control, Automation and Systems, vol.2, no.4, pp.435-449, December) предложено вместо системы технического зрения использовать для определения угла раскачивания инклинометр, закрепленный на головном блоке крана. Недостаток соединения датчика, расположенного на крюке, с контроллером, предусмотренным на кране, заключается в том, что требуется либо длинная проводка, которая легко запутывается, либо беспроводной передатчик в указанном датчике и соответствующий приемник в указанном контроллере, при этом проблематичной также является подача питания на датчик. Другой недостаток состоит в том, что датчик, расположенный рядом с крюком, довольно чувствителен к внешним ударам, например, случайному столкновению с грузом, которое может произойти во время крепления груза к крюку.
В документе WO 2009/138329 раскрыто техническое решение, которое позволяет устранить вышеуказанные недостатки, поскольку измерение выполняют в направлении вниз. В данном случае, в процессе перемещения груза, посредством группы акселерометров, расположенных на тросе в той его части, которая является неподвижной, или в месте жесткой заделки троса, вычисляют величину смещения захватного элемента груза относительно соответствующей оси (x, y, z) прямоугольной системы координат на основании угла отклонения троса и положения крюка относительно оси Ζ. Смещение крюка подъемного механизма по трем осям прямоугольной системы координат раскрыто в документе WO 2009/138329, причем подобное смещение является существенным отличительным признаком описанного в данном документе способа. Проблема технического решения, известного из документа WO 2009/138329, заключается в том, что оно не учитывает тот факт, что в случае, когда угол отклонения троса измеряют рядом с местом жесткой заделки троса, ускорение или торможение крана приводит к появлению ошибки в измеренном угле отклонения троса.
Раскрытие изобретения
Таким образом, задача настоящего изобретения состоит в том, чтобы предложить способ и устройство для осуществления указанного способа, обеспечивающие усовершенствованное техническое решение. Указанная задача настоящего изобретения решена посредством подъемного крана, способа, комплекта и компьютерного программного продукта, которые характеризуются признаками, изложенными в независимых пунктах формулы изобретения. Предпочтительные варианты осуществления настоящего изобретения раскрыты в зависимых пунктах формулы.
В основе настоящего изобретения лежит измерение угла отклонения троса посредством датчика угла наклона, расположенного на тележке или рядом с тележкой, корректировка полученной таким образом информации обратной связи по углу отклонения троса путем компенсации ошибки, вызванной изменением скорости, и выдача управляющей информации, например, инструкций по перемещению крана, путем использования указанной скорректированной информации обратной связи по углу отклонения троса.
Преимущество, обеспечиваемое указанной компенсацией, заключается в том, что удается исправить ошибку, вызванную, например, ускорением, что позволяет исключить вероятность получения ошибочной информации по углу, и, соответственно, ошибочной управляющей информации. Другими словами, скорректированная информация обратной связи по углу отклонения троса обеспечивает получение информации о действительном угле отклонения троса в реальном времени с достаточной точностью, даже при изменении скорости крана. Таким образом, управление краном всегда основано на корректной информации, поступающей в реальном времени.
Краткое описание чертежей
Далее варианты осуществления настоящего изобретения будут описаны более подробно со ссылками на прилагаемые чертежи, на которых изображено следующее.
На фиг. 1А, 1В, 1С упрощенно показана система крана согласно различным вариантам осуществления настоящего изобретения.
На фиг. 1D показан пример исполнения поворотного стержня.
На фиг. 2А, 2В, 2С, 2D и 2Е представлены структурные схемы, иллюстрирующие различные варианты осуществления настоящего изобретения.
На фиг. 3 проиллюстрировано, как изменения скорости крана влияют на точность измерения угла.
На фиг. 4 и 5 представлены блок-схемы, иллюстрирующие различные варианты осуществления предлагаемого способа управления.
На фиг. 6, 7 и 8 представлены структурные схемы, иллюстрирующие модифицированные варианты осуществления предлагаемого способа управления с фиг. 5.
На фиг. 9, 10, 11, 12, 13 и 14 показаны блок-схемы, иллюстрирующие различные варианты осуществления предлагаемого способа управления.
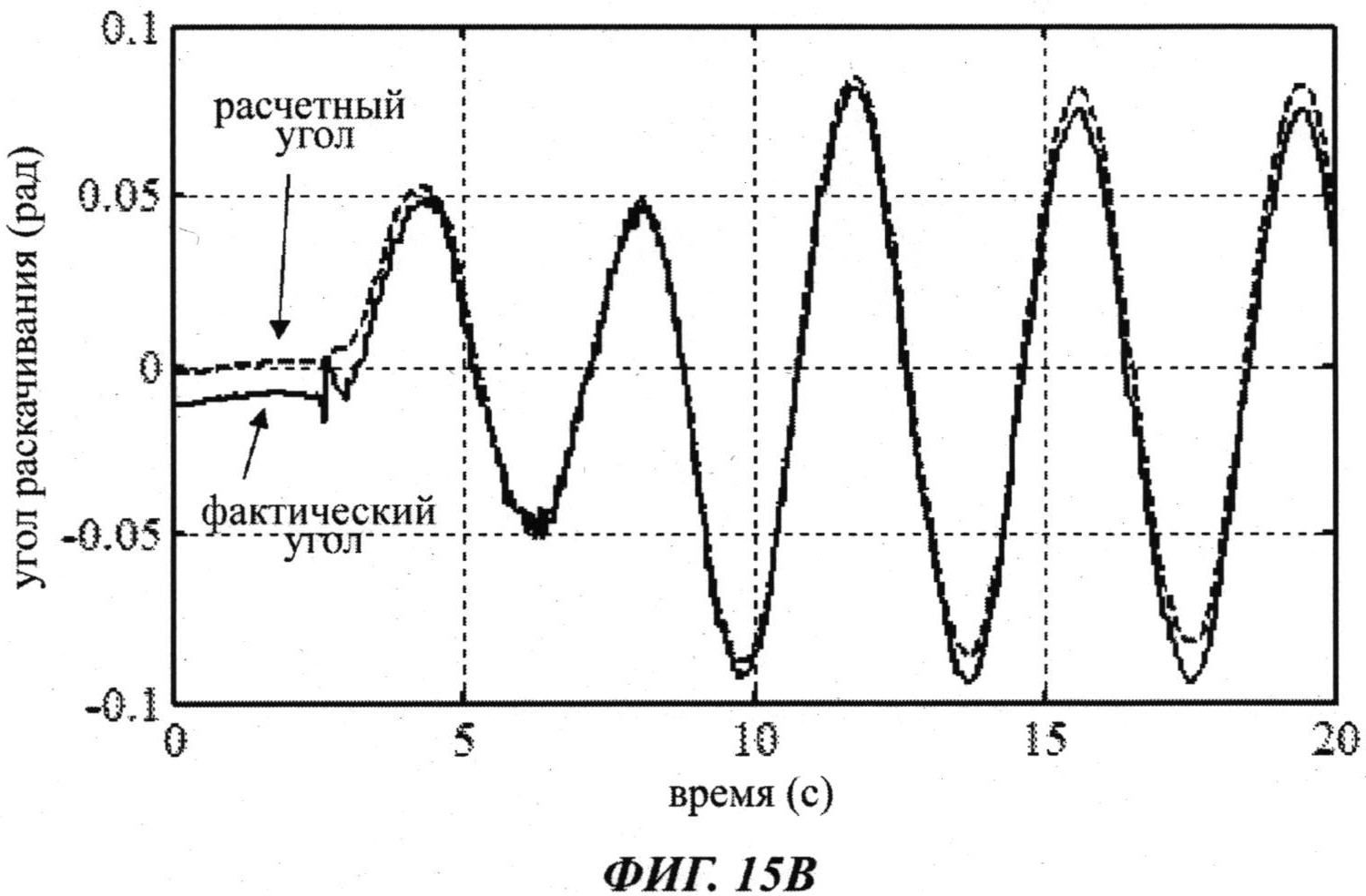
На фиг. 15А и 15В проиллюстрированы экспериментальные результаты, а на фиг. 15С проиллюстрирован результат моделирования.
На фиг. 16 проиллюстрирован еще один вариант осуществления предлагаемого способа управления.
На фиг. 17А и 17В показано устройство для вычисления длины троса.
Осуществление изобретения
Описанные ниже варианты осуществления настоящего изобретения являются примерами. Несмотря на то, что в нескольких местах описание содержит понятие «любой», «один» или «некоторый» вариант (или варианты) осуществления, это необязательно означает, что каждое такое понятие относится к одному и тому же варианту (или вариантам), или что рассматриваемый признак применим только к одному варианту осуществления настоящего изобретения. Отдельные признаки разных вариантов осуществления настоящего изобретения могут также быть скомбинированы для получения других вариантов осуществления настоящего изобретения.
Настоящее изобретение применимо к любому крану или системе крана, в которой для подъема груза использован трос или тросы или соответствующие средства, при этом трос установлен на подвижном устройстве, выполненном с возможностью движения по меньшей мере вдоль одной оси. В приведенном ниже описании рассмотрены различные варианты осуществления настоящего изобретения, в которых в качестве примера использован мостовой подъемный кран, однако, такие варианты осуществления не ограничены указанным типом крана. К другим примерам относятся стандартные краны и краны большой грузоподъемности, например, козловые краны, башенные краны, краны с поворотной стрелой, контейнерные краны-перегружатели, краны буровых платформ, краны с несколькими подъемными механизмами (краны, в которых предусмотрена тележка с несколькими крюками и/или краны с более чем одной тележкой), и прочее.
На фиг. 1А, 1В и 1С упрощенно показан пример электрического мостового крана, при этом изображены только некоторые элементы и функциональные узлы крана. Соединения, изображенные на фиг. 1А, 1В и 1С, являются логическими соединениями, при этом реальные физические соединения могут быть различными. Специалисту в данной области техники должно быть очевидным, что кран также содержит другие элементы и функциональные узлы. Однако, они не имеют отношения к настоящему изобретению, поэтому нет необходимости в их подробном рассмотрении. В частности, дополнительно к известным из уровня техники средствам предлагаемый кран также содержит средства для реализации функции управления, описанной применительно к одному из вариантов осуществления настоящего изобретения. Кроме того, кран может содержать отдельные средства для каждой отдельной функции, или же средства могут быть выполнены с возможностью выполнения одной или нескольких функций, и даже с возможностью комбинирования функций различных вариантов осуществления настоящего изобретения. Другими словами, кран выполнен с возможностью реализации одной или нескольких функций управления, которые будут рассмотрены ниже применительно к одному из вариантов осуществления настоящего изобретения, при этом он может быть выполнен с возможностью реализации функций из других вариантов осуществления настоящего изобретения.
Согласно фиг. 1А и 1В, кран 100 содержит тележку 120, установленную с возможностью движения вдоль моста 130. Как показано на фиг. 1А, тележка 120 содержит контроллер 101 и вычислитель 102, причем контроллер 101 предназначен для управления движением тележки 120 и движением моста вдоль рельсов (на фиг. 1 не показаны), а вычислитель предназначен для обработки информации обратной связи по углу отклонения троса и для передачи результата обработки в контроллер 101. Следует понимать, что вычислитель 102 можно также использовать для других целей, при этом вычислитель 102 может принимать входные сигналы от контроллера 101. В примере, изображенном на фиг. 1В, контроллер и вычислитель объединены в одно устройство 103. Следует понимать, что может быть предусмотрен отдельный контроллер и/или отдельный вычислитель для тележки и для моста, причем контроллер и вычислитель могут быть объединены в одно устройство, при этом контроллер и/или вычислитель могут быть расположены в любом другом месте, например, в шкафу электрооборудования на мосту, при этом отдельный контроллер тележки может быть расположен на мосту, и наоборот. Функции вычислителя и контроллера будут подробно рассмотрены ниже.
Подъемный трос 140 закреплен на тележке в точке крепления троса. Подъемный трос может представлять собой любое средство, именуемое в стандартах «грузоподъемным средством», обеспечивающим возможность поднятия грузов. В качестве примеров такого средства можно привести проволочный трос, ленту, цепь, канат, плоский ремень, имеющий параллельные стальные проволоки, связанные или скрепленные резиновой матрицей, и прочее. Используемый в описании термин «трос» охватывает все грузоподъемные средства. Трос 140 на своем свободном конце имеет крюк 141 или соответствующее захватное средство, обеспечивающее возможность переноса груза 142. На фиг. 1А крюк показан в виде черной точки 141, при этом груз отсутствует. На фиг. 1В также изображен груз 142.
Кран также содержит датчик 150 угла наклона, в примере, приведенном на фиг. 1А, установленный непосредственно в месте крепления троса, причем указанное место крепления троса представляет собой точку, в которой к концу троса приложено давление, создаваемое одним или несколькими клиновыми анкерами, и которая автоматически располагается по линии наклона троса. Следует понимать, что датчик угла наклона может быть установлен в любой точке, которая при изменении угла отклонения торса, наклоняется соответствующим образом. В других примерах указанный датчик может быть установлен непосредственно на тросе, как показано на фиг. 1В, предпочтительно на конце троса, закрепленном на тележке, рядом с местом крепления троса или на крепежном элементе троса, например, на опоре тросового барабана, или рядом с концом троса в точке, которая не намотана на барабан, или же, если трос не является неподвижным, то есть, имеет возможность сматываться у своего крепежного конца - на конструкции типа втулки, окружающей трос, при этом указанная конструкция типа втулки повторяет движение троса относительно направления движения тележки и/или моста и прикреплена к неподвижной части, например тележке или мосту крана. Использование конструкции типа втулки обеспечивает преимущество, заключающееся в том, что при принятии решения о том, где разместить датчик угла наклона, не нужно принимать во внимание движение самого троса, поскольку конструкция типа втулки и датчик угла наклона сохраняют свои положения, в то время как трос, проходя через втулку, наматывается на барабан или сматывается с барабана. Датчик 150 угла наклона измеряет угол θ (то есть в рассматриваемом примере - угол отклонения троса от вертикали) и посылает информацию обратной связи по углу отклонения троса в вычислитель 102 для обработки. Как можно видеть, информацию обратной связи по углу отклонения троса получают путем измерения в направлении крюка.
Система, изображенная на фиг. 1С, отличается от системы, представленной на фиг. 1А и 1В, тем, что помимо датчика 150 угла наклона, троса 140, крюка 141, барабана 104, тележки 120, установленной с возможностью движения вдоль моста, контроллера и вычислителя (изображенных на фиг. 1С в виде единого устройства 103) кран 100 также содержит датчик 160 искажения угла, установленный на одной стороне тележки для измерения с тележки величины искажения угла. Датчик 160 искажения угла измеряет ошибку, вызванную изменением скорости (при разгоне/торможении) тележки и/или моста и влияющую на результат измерения угла, когда в качестве датчиков угла наклона используют акселерометры и инклинометры. Датчик 160 искажения предпочтительно аналогичен датчику 150 угла наклона, то есть представляет собой акселерометр или инклинометр. Хотя здесь и далее предполагается, что датчик 160 искажения угла установлен на тележке, следует понимать, что датчик 160 искажения угла может быть также установлен и на мосту.
В зависимости от варианта осуществления настоящего изобретения и/или цели, с которой используют результаты измерения угла, датчик угла наклона выполнен с возможностью выдачи информации по углу θ отклонения троса относительно только направления движения тележки, относительно только направления движения моста, или относительно направлений движения и тележки, и моста.
Следует понимать, что угол, показанный на фиг. 1А, изображен упрощенно и что фактический измеренный угол может зависеть от запасовки троса и/или косвенно от высоты, на которой расположен крюк. Таким образом, информация по углу θ отклонения троса указывает на то, насколько угол отклонения троса отличается от угла, при котором груз находится непосредственно под тележкой и/или мостом. В дальнейшем указанный угол обозначен как «искомый угол». Груз расположен непосредственно под тележкой и/или мостом, когда центр тяжести груза находится непосредственно под точкой приложения подъемной силы крана. Точка приложения подъемной силы зависит, например, от запасовки троса, причем обычно указанная точка не является фиксированной. Точкой приложения подъемной силы может быть середина тележки и/или моста, но, как известно специалистам в данной области техники, это может быть и какая-то иная точка. В варианте осуществления изобретения, согласно которому для подъема груза используют две или несколько тележек, как показано на фиг. 8, груз считается расположенным непосредственно под тележкой, когда угол отклонения троса равен искомому углу в направлении движения тележки.
Далее будут рассмотрены различные варианты осуществления настоящего изобретения, в которых в качестве датчика угла наклона использован инклинометр. Преимущество такого признака заключается в том, что установку инклинометра на закрепленном конце троса можно осуществить без особых затруднений в кранах различных типов, причем сам инклинометр отличается надежностью и низкой стоимостью. Кроме того, инклинометр не чувствителен к воздействию окружающей среды и к изменениям окружающей среды. К примеру, камера чувствительна к изменениям окружающей среды, таким как дождь, снег, влажность, туман, условия освещения и прочее. Кроме того, использование инклинометра, обладающего способностью различать два направления (моста и тележки), обеспечивает преимущество, заключающееся в том, что информацию получают посредством одного единственного датчика, причем отпадает необходимость использовать отдельный датчик для каждого направления. Однако, следует понимать, что для определения угла могут быть использованы и другие датчики, такие как акселерометры и/или гироскопы.
Кроме того, датчик угла наклона может быть выполнен в виде шарнирно-соединенного стержня (поворотного стержня) 151, пример которого представлен на фиг. 1D. Обойма 59 шарнира 51, которая делит стержень на две части, установлена на тележке и прикреплена к тросу 140 посредством направляющих 56. Пара направляющих 56 обеспечивает эффект конструкции типа втулки, окружающей трос 140. Преимущество такой компоновки состоит в том, что трос 140 проходит сквозь указанную конструкцию типа втулки, причем указанная конструкция может быть установлена под тросовым барабаном. Шарнир предпочтительно имеет шарообразную форму, так что имеет подвижность в направлениях x и y. Стержень 151 направлен вниз и установлен таким образом, что его верхний конец 53 опирается, например, на датчики силы. Датчики 57, 58 силы обнаруживают движение верхнего конца 53, в частности острия 54 на указанном верхнем конце, по осям x и y, тем самым, обеспечивая средства для определения угла отклонения троса. Следует понимать, что вместо датчиков силы или дополнительно к датчикам силы могут быть использованы датчики других типов, обнаруживающие движение верхнего конца стержня. Примером такого датчика является датчик перемещения. Другим примером такого датчика является электрооптический датчик, содержащий электрическое/оптическое устройство, например, лазер, на острие 54. В указанном устройстве световой луч направлен вверх на поверхность, подвергающуюся сканированию для считывания x- и y-координат, причем на основе указанных координат вычисляют угол отклонения троса. Поверхность, подвергающаяся сканированию, может представлять собой, например, плоскость или полусферу. Указанное устройство предпочтительно закрыто кожухом, защищающим устройство от пыли и других источников света. Кожух сам по себе может обеспечивать поверхность, подвергаемую сканированию, например, наверху измерительного устройства. Точка, в которой расположен шарнир 51, делит стержень на верхний конец 53 и нижний конец 55, тем самым, создавая механический коэффициент усиления. Механический коэффициент усиления можно выбирать, задавая точку расположения шарнира 51 относительно длин верхнего конца 53 и нижнего конца 55. Другими словами, обнаружение направления движения стержня можно усилить путем расположения точки шарнира/поворота несколько ниже по стержню. Положение указанной точки можно выбирать произвольно, при этом фактическая величина «несколько ниже» зависит от типа датчиков перемещения. Если длина стержня составляет приблизительно 300-500 мм, то указанная точка может быть расположена, например, так что1/4 длины находится выше указанной точки, а остальные3/4 - ниже указанной точки. Следует понимать, что длина верхнего конца 53 может быть равна нулю, то есть вся длина стержня 151 может быть равна длине нижнего конца 55 плюс диаметр шарнира.
В приведенных примерах предполагается, что вычислитель и/или контроллер выполняют функцию управления краном либо сами по себе, либо посредством одного или нескольких дополнительных устройств, описанных в одном из примеров. Кран может содержать различные интерфейсные устройства, такие как дисплеи, приемники и передатчики. Каждое из таких устройств может представлять собой отдельное устройство или может быть встроено в другое устройство, или же устройства могут быть объединены друг с другом.
Вычислитель и/или контроллер, или соответствующее устройство/схема/блок/система могут быть реализованы различными способами. Например, вычислитель и/или контроллер могут быть реализованы аппаратными средствами (одно или несколько устройств/схем/блоков), программно-аппаратными средствами (одно или несколько устройств/схем/блоков), и программными средствами (один или несколько модулей), или же путем сочетания указанных средств. Что касается программно-аппаратных и программных средств, то реализация возможна посредством блоков/модулей (например, процедур, функций и прочее), которые выполняют функции, рассмотренные в настоящем описании.
Вычислитель и/или контроллер могут быть выполнены в виде компьютера или процессора, например, как однокристальный компьютер, или как компьютер на чипсете, или микроконтроллер, содержащий по меньшей мере накопитель для обеспечения области хранения информации, используемой в арифметических операциях, и процессор для выполнения арифметических операций, или как программируемый логический контроллер, или частотный преобразователь. Вычислитель и/или контроллер могут содержать один или несколько процессоров, специализированных интегральных микросхем (ASIC), цифровых сигнальных процессоров (DSP), устройств цифровой обработки сигнала (DSPD), программируемых логических устройств (PLD), программируемых пользователем вентильных матриц (FPGA) и/или других аппаратных компонентов, которые были запрограммированы для выполнения одной или нескольких функций одного или нескольких вариантов осуществления настоящего изобретения. В любом варианте осуществления настоящего изобретения предусмотрена компьютерная программа, реализованная в считываемой клиентом среде распространения/хранения информации, или блоке (или блоках) памяти или в изделии (или изделиях) производства, содержащем программные инструкции, исполняемые одним или несколькими микропроцессорами/компьютерами, причем указанные инструкции при загрузке в устройство (аппарат), образуют вычислитель и/или контроллер. Программы, также называемые программным продуктом и включающие в себя системные программы, программные фрагменты, образующие «библиотеки программ», апплеты и макросы, могут храниться в любой среде, причем их можно загружать в устройство. Среда хранения данных или блок памяти могут быть реализованы внутри микроконтроллера/процессора/компьютера или за пределами процессора/компьютера, причем в этом случае среда хранения данных или блок памяти может быть связан с микроконтроллером/процессором/компьютером по каналу обмена данными с применением средств, известных в данной области техники.
Указанный накопитель может быть энергозависимым и/или энергонезависимым, например, типа EEPROM, ROM, PROM, RAM, DRAM, SRAM, флэш-памяти, программируемой логики, полевых транзисторов с двойным плавающим затвором и прочее. Как правило, указанный накопитель хранит информацию, данные, или иное, о чем будет сказано ниже. Кроме того, указанный накопитель может хранить компьютерный программный код, например, программные приложения (для блока редактирования или блока распечатки данных), или операционные системы, информацию, данные, текстовое наполнение и прочее для выполнения процессором операций, связанных с работой узловой точки доступа и/или пользовательского оборудования в соответствии с различными вариантами осуществления настоящего изобретения. Указанный накопитель может представлять собой, например, оперативную память, жесткий диск, другую неизменяемую память для хранения информации, или запоминающее устройство, или комбинацию перечисленных устройств. Кроме того, указанный накопитель или его часть может представлять собой съемный накопитель, соединенный с возможностью съема с узловой точкой доступа и/или пользовательским оборудованием.
Один из вариантов осуществления настоящего изобретения предусматривает наличие комплекта, который является сменным, то есть комплект, дополнительно к устройствам и оборудованию, устанавливаемому на кране при его изготовлении, может представлять собой ремонтный комплект. Ремонтный комплект может быть установлен, например, во время технического обслуживания или работ по реконструкции крана для его усовершенствования так, чтобы обеспечить наличие у крана развитых логических функций, улучшающих характеристики крана. Простой крана, вызванный работами по модернизации, незначителен, особенно, если модернизацию выполняют во время технического обслуживания. Указанный комплект содержит датчик угла наклона, предназначенный для установки в надлежащем месте на кране, причем указанное место обеспечивает возможность выполнения измерения угла отклонения троса в направлении вниз, о чем говорилось ранее. Кроме того, указанный комплект содержит вычислитель и контроллер, например, в виде предварительно запрограммированного частотного преобразователя, входное интерфейсное устройство для приема результатов измерения угла от датчика угла наклона, и выходное интерфейсное устройство для передачи инструкций, то есть управляющей информации на кран, в частности, на механизм крана. В рамках настоящего изобретения термин «механизм крана» охватывает любой блок/модуль/узел, на который передается управляющая информация для управления краном. К примерам таких блоков/модулей/узлов относится система управления движением, электродвигатель, система привода, например, сочетание электродвигателя, редуктора и барабана, а также частотный преобразователь, получающий управляющую информацию по шине или через цифровой интерфейс ввода/вывода, или же через аналоговый интерфейс ввода/вывода. Комплект может быть изготовлен по техническим условиям заказчика в соответствии с типом крана и/или предполагаемыми условиями эксплуатации (температура, влажность, работа в помещении, работа на открытом воздухе) и/или нормами/стандартами той страны, где должен быть расположен кран, или уже расположен, если кран подлежит модернизации. Когда комплект используют для модернизации крана, типы коннекторов могут быть оптимизированы и/или сам комплект может быть выполнен по стандарту «подключай и работай», что позволяет сократить время простоя.
Функции вычислителя и контроллера будут подробно рассмотрены ниже на примере управляющего модуля, содержащего интегрированный вычислитель и контроллер. Следует понимать, что управляющий модуль может также принимать и другие входные сигналы, помимо тех, которые будут описаны ниже, в зависимости от задачи управления и требований. Однако, такие другие входные сигналы не имеют отношения к раскрываемым вариантам осуществления изобретения, и поэтому подробно описаны не будут.
На фиг. 2А, 2В, 2С, 2D и 2Е показаны структурные схемы аппаратов/схем/устройств согласно различным вариантам осуществления настоящего изобретения, причем проиллюстрированы разные варианты соединения элементов схемы. Как можно видеть, в каждой из схем предусмотрен замкнутый контур, созданный средствами обратной связи. Контур обратной связи всегда содержит информацию обратной связи по углу отклонения троса, а в некоторых вариантах осуществления настоящего изобретения - информацию обратной связи по скорости или соответствующую информацию. Таким образом, может быть реализован недорогой, простой в установке и надежный контур обратной связи.
Кроме того, следует понимать, что могут быть предусмотрены отдельные управляющие модули для моста и для тележки, особенно в вариантах, в которых сигнал угла принимают отдельно для моста и для тележки.
В проиллюстрированных примерах предполагается, что кран содержит инклинометр, обеспечивающий информацию обратной связи по углу в форме сигнала угла, управляющий модуль, выдающий управляющую информацию, и механизм крана. В данном случае, термин «механизм крана» охватывает, дополнительно к традиционным механическим узлам, таким как электродвигатель и тормоз, также и другие узлы, такие как привод от электродвигателя, необходимые для перемещения тележки и/или моста в соответствии с управляющей информацией.
На фиг. 2А представлена структурная схема, иллюстрирующая модель примера управляющего модуля.
Указанная модель иллюстрирует пример, в котором система управления краном непосредственно использует полученную путем измерения и скорректированную информацию по углу отклонения троса. В приведенном примере система управления краном содержит контроллер наклона, выполненный с возможностью определения того, является ли измеренный угол отклонения троса равным искомому углу, и возможностью выдачи соответствующих управляющих инструкций, причем управляющие инструкции в данном примере не содержат инструкций по перемещению, созданных управляющим блоком. Следует понимать, что соответствующая схема может быть также использована и для других целей.
Согласно фиг. 2А, управляющий модуль 203-а через интерфейс (на фиг. 2А не показан) принимает от инклинометра сигнал измеренного угла θ отклонения троса и подает его на вход фильтра 21 нижних частот. Фильтр 21 нижних частот подавляет высокочастотный шум сигнала измеренного угла отклонения троса и выдает отфильтрованный сигнал θфнч. Для компенсации ошибки, вызванной ускорением крана и появляющейся в сигнале измеренного угла отклонения троса, отфильтрованный сигнал θфнч подают на вход устройства компенсации ускорения, которое содержит усилитель 29 и вычитающее устройство 28, что на фиг. 2А окружено пунктирной линией. Вычитающее устройство 28 вычитает из указанного отфильтрованного сигнала результат умножения коэффициента «с» усиления компенсации на ускорение «а» тележки или моста, выполняемого в усилителе 29.
Значение параметра ускорения «а» может быть получено любыми подходящими средствами, например, непосредственно от дополнительного датчика ускорения, или путем определения значения «а» из предыдущей управляющей информации, или может быть определено на основании ранее выданных инструкций по скорости, или же может быть получено в виде выходного сигнала дифференциатора, вычисляющего производную по времени от измеренной скорости. Коэффициент «с» усиления компенсации определяют экспериментально, что будет рассмотрено ниже со ссылкой на фиг. 3. Полученное таким образом скорректированное значение угла θкор подают затем на вход контроллера 26а наклона. Контроллер 26а наклона соединен с пользовательским интерфейсом 34 для обеспечения пользовательского интерфейса посредством обработанного отфильтрованного сигнала Т′, и, например, предупреждения оператора и/или выдачи оператору управляющих инструкций. Соединение между пользовательским интерфейсом и контроллером наклона может быть проводным или беспроводным.
Следует понимать, что контроллер наклона может также принимать в качестве входных данных информацию о других результатах измерения в зависимости от применения варианта осуществления настоящего изобретения.
На фиг. 2В представлена структурная схема, иллюстрирующая модель другого примера управляющего модуля 203-b. Данная модель содержит устройство компенсации ускорения, в котором использованы вышеописанные принципы. Однако, рассматриваемая модель отличается от модели с фиг. 2А тем, что она обрабатывает информацию обратной связи по углу отклонения троса для выдачи информации, необходимой для инструкций по перемещению крана.
Согласно фиг. 2В, управляющий модуль 203-b через интерфейс (на фиг. 2В не показан) принимает от инклинометра сигнал θ измеренного угла отклонения троса и подает его на вход фильтра 21 нижних частот. Фильтр 21 нижних частот подавляет высокочастотный шум сигнала измеренного угла отклонения троса и выдает отфильтрованный сигнал θфнч. Отфильтрованный сигнал затем подают на вход устройства компенсации ускорения, которое содержит усилитель 29 и вычитающее устройство 28. В приведенном примере скорость крана используют для получения значения «а» ускорения посредством дифференциатора 30. Полученное таким образом скорректированное значение угла θкор подают затем на вход блока 22 имитации зоны нечувствительности с тем, чтобы модифицировать сигнал и избежать неожиданных движений, вызванных низкочастотным шумом и ошибкой смещения, которая все же может присутствовать в потоке обратной связи по углу. Блок 22 имитации зоны нечувствительности выдает модифицированный сигнал θмод угла, который затем умножают в усилителе 23 на коэффициент «b», чтобы получить сигнал первой контрольной скорости vкон1 для крана. Величина усиления «b» зависит от типа рассматриваемого крана, причем указанную величину предпочтительно задают так, чтобы тележка и/или мост достигали соответствующей скорости. В зависимости от установочных параметров переключателя 24, на вход ограничителя 25 скорости крана в качестве сигнала контрольной скорости vкон подают либо сигнал первой контрольной скорости vкон1, основанный на информации обратной связи по углу, либо сигнал нормальной контрольной скорости vкон0. В приведенном примере переключатель 24 установлен в положение для подачи на вход ограничителя скорости сигнала первой контрольной скорости. Сигнал нормальной контрольной скорости Vкон0 формируют посредством команды от оператора и принимают через интерфейс (на фиг. 2В не показан) от устройства управления оператора, такого как джойстик, устройство с кнопками управления, устройство радиоуправления, подвесной пульт управления или сенсорный экран. Ограничитель 25 скорости затем передает сигнал ограниченной скорости vогр в контроллер 26-b движения, который далее выдает сигнал Τ инструкции по перемещению крана, например, крутящий момент, для механизма 27 крана, который показан штриховыми линиями.
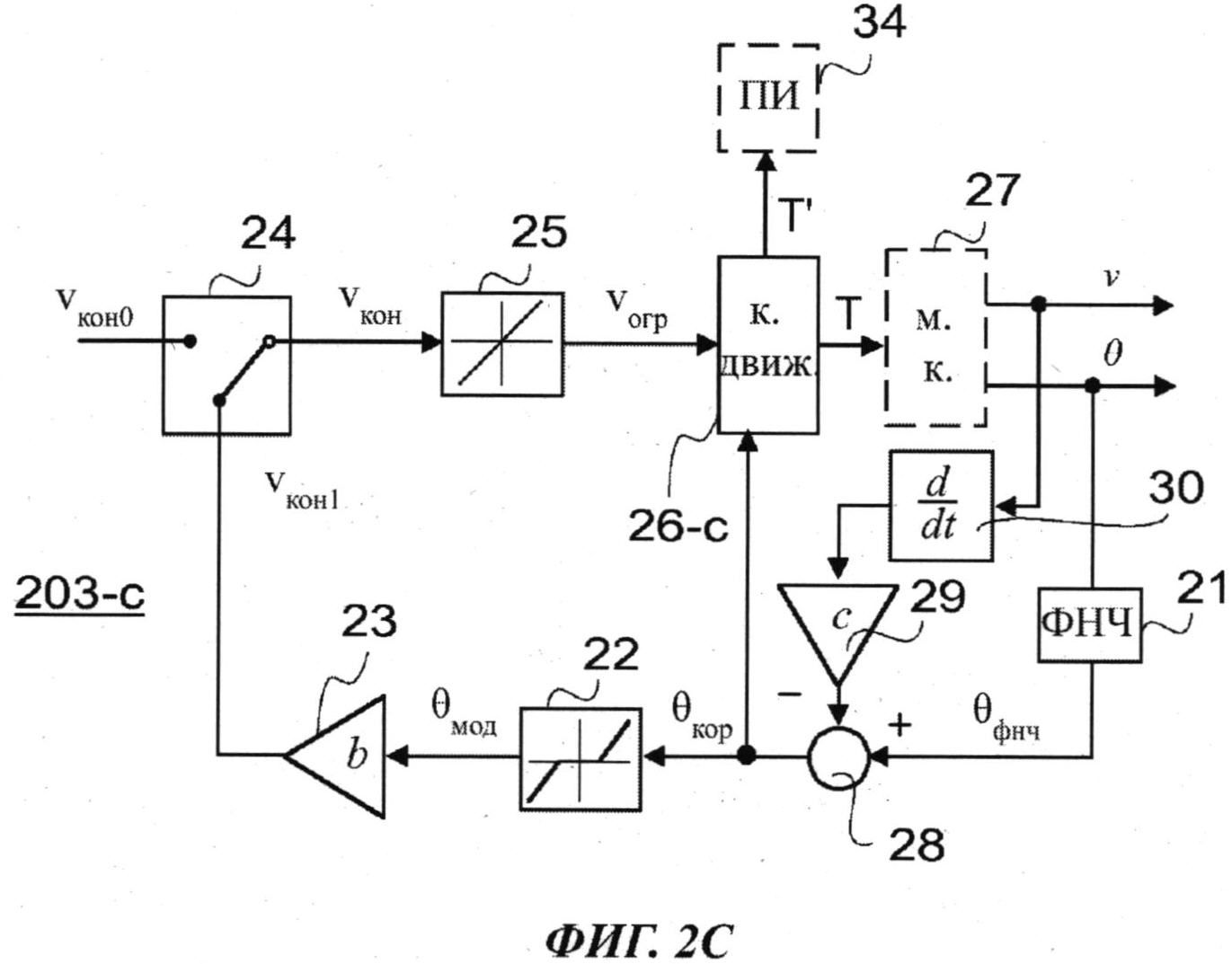
На фиг. 2С представлена структурная схема, иллюстрирующая модель еще одного примера управляющего модуля 203-с. Указанная модель представляет собой комбинацию управляющего модуля с фиг. 2А и управляющего модуля с фиг. 2В, поэтому подробно рассматриваться не будет. При этом указанная модель отличается от модели с фиг. 2В тем, что контроллер 26-с движения в качестве входных сигналов принимает сигнал ограниченной скорости vогр и скорректированную информацию по измеренному углу θкор отклонения троса. Контроллер 26-с выполнен с возможностью исполнения одной или нескольких функций управления, которые будут описаны ниже. Другими словами, контроллер 26-с содержит контроллер движения и/или контроллер наклона. Кроме того, контроллер 26-с связан с одним или несколькими пользовательскими интерфейсами 34 посредством соответствующих проводных или беспроводных соединений. В данном случае контроллер 26-с выдает сигнал Τ инструкции по перемещению крана, например, крутящий момент, для механизма 27 крана.
Хотя в примерах, приведенных на фиг. 2В и 2С, скорректированный сигнал θкор угла обрабатывают посредством блока имитации зоны нечувствительности, вместо указанного блока возможно использование других способов и функций модификации сигнала. Один из возможных вариантов предусматривает использование ступенчатой функции. Ступенчатая функция особенно подходит для мостов и тележек, для которых отсутствует плавное изменение скорости.
На фиг. 2D представлена структурная схема, иллюстрирующая модель еще одного примера управляющего модуля. Управляющий модуль представляет собой модуль с замкнутым контуром регулирования, который образован витком прямой связи и витком обратной связи, то есть обратная связь по полученной информации по углу отклонения троса учитывает и другие переменные, такие как сигнал контрольной скорости, заданной оператором, а также другую информацию, не показанную в данном примере, например, измеренную скорость крана. Представленный пример можно также использовать в разомкнутой системе управляющего модуля, управляемого напряжением или частотой, например, привода электродвигателя.
Согласно фиг. 2D, управляющий модуль 203-d через интерфейс (на фиг. 2D не показан) принимает от инклинометра сигнал θ измеренного угла отклонения троса и подает его на вход фильтра 21 нижних частот. Фильтр 21 нижних частот подавляет высокочастотный шум сигнала измеренного угла отклонения троса и выдает отфильтрованный сигнал θфнч. Для компенсации ошибки, вызванной ускорением крана и появляющейся в сигнале измеренного угла отклонения троса, отфильтрованный сигнал θфнч подают на вход устройства компенсации ускорения, которое в данном примере содержит усилитель 29 и вычитающее устройство 28, которое вычитает из отфильтрованного сигнала результат умножения коэффициента «с» усиления компенсации на ускорение «а» тележки или моста, выполненного в усилителе 29. В данном примере, ускорение «а» представляет собой величину на выходе дифференциатора 30, который в качестве входного сигнала принимает сигнал контрольной скорости. Полученную таким образом скорректированную информацию по углу θкор подают затем на вход устройства 31 наблюдения за раскачиванием. Устройство наблюдения за раскачиванием в качестве еще одного входного сигнала принимает сигнал ускорения «а», а на выходе выдает сигнал расчетного угла θрас раскачивания. Сигнал расчетного угла раскачивания является входным сигналом для пропорционального регулятора 32 с коэффициентом «b» усиления. Коэффициент «b» усиления был рассмотрен выше со ссылкой на фиг. 2В. Выходной сигнал vкон.кор пропорционального регулятора (корректора контрольной скорости) ограничивают посредством ограничителя 33 скорости, а затем в вычитающем устройстве 28′ вычитают из ограниченного (ограничителем 33′ скорости) сигнала исходной контрольной скорости vкон0. Полученный таким образом сигнал контрольной скорости vкон подают на устройство 26-d управления скоростью, которое выдает сигнал Τ инструкции по перемещению крана, например, крутящий момент, для механизма 27 крана.
В примере, представленном на фиг. 2D, устройство 26-d управления скоростью способно выдавать выходной сигнал непосредственно, на основе сигнала контрольной скорости vкон, причем указанный сигнал контрольной скорости vкон является аналоговым сигналом, подаваемым в аналоговый входной интерфейс устройства управления скоростью (например, в частотный преобразователь), или же указанный сигнал контрольной скорости vкон передают через промышленную шину данных из вычислителя (например, программируемого логического контроллера) на вход интерфейса шины устройства управления скоростью. В качестве альтернативного варианта, управляющий модуль может быть расположен в частотно-управляемом приводе. В этом случае, показания датчика передают в привод через аналоговый и/или цифровой интерфейс привода.
Устройство 31 наблюдения за раскачиванием устраняет смещение из сигнала измеренного угла раскачивания и действует согласно следующим формулам (1) и (2):


где
ωрас - расчетная угловая скорость раскачивания;
Нрас - расчетная длина троса;
а - значение ускорения;
g - ускорение свободного падения;
k1 и k2 - коэффициенты усиления устройства наблюдения за раскачиванием;
θрас - расчетный угол раскачивания;
θкор - скорректированный угол отклонения троса.
Величина Нрас может быть любой приемлемой величиной в диапазоне от минимальной до максимальной высоты подъема, включая постоянную величину, даже когда фактическая длина троса изменяется. Длина троса может быть задана, как параметр системы. Приемлемой величиной для параметра Нрас является, например, длина троса, которую обычно используют при перемещении грузов рассматриваемым краном. Вместо постоянной величины, в качестве Нрас может быть использована измеренная или расчетная длина троса. Длина троса может быть измерена любым способом и несколькими средствами. Согласно одному из вариантов осуществления настоящего изобретения, на подъемном электродвигателе могут быть установлены один или несколько кодовых датчиков положения. Согласно другому варианту осуществления настоящего изобретения, на барабане, на оси вращения или на шкиве может быть установлен акселерометр. Согласно еще одному варианту осуществления настоящего изобретения, длина троса может быть рассчитана на основе измерения вертикального положения крюка относительно крана, к примеру, ультразвуковыми датчиками (излучатель - на крюке, а приемник - на тележке), лазерами (расстояние между тележкой и крюком), путем измерения расстояния с использованием радиочастот (по сверхширокополосной технологии, с передатчиком - на крюке, а приемником - на тележке), или же посредством обычных или стерео- или время-пролетных камер, закрепленных на тележке и обращенных вниз в сторону крюка. Еще один вариант осуществления настоящего изобретения заключается в определении точки отделения троса/точки подачи троса на канавке верхнего барабана посредством пары индуктивных датчиков или одной камеры. Еще одна возможность заключается в определении высоты на основе импульсов управления приводом с точкой калибровки на заданной высоте подъема. Высоту также можно рассчитать путем интегрирования скорости подъема. На фиг. 17А и 17В показана простая система, обеспечивающая сравнительно точную оценку высоты посредством датчика с вытягиваемым тросиком, который измеряет положение укладки троса на барабан.
Формулу (1), если ее проинтегрировать, используют для определения расчетной угловой скорости ωрас раскачивания. Формулу (2), если ее проинтегрировать, используют для определения расчетного угла θрас раскачивания.
Следует понимать, что хотя устройство наблюдения за раскачиванием описано, как непрерывное устройство, при фактической реализации указанное устройство может действовать дискретно. Может быть использован любой подходящий метод дискретизации.
К примеру, в системе, изображенной на фиг. 2D, могут быть использованы следующие значения: если нижняя часть моста крана отстоит от земли на 12 м, а крюк при перемещении грузов обычно находится на высоте 2 м от земли, то приемлемое значение расчетной длины троса может составлять 10 м, при этом коэффициент усиления «b» контроля раскачивания может составлять 8 м/с, а коэффициент усиления устройства наблюдения за раскачиванием может быть равен 0, а k2 может быть равен 2 с-1.
На фиг. 2Е представлена структурная схема, иллюстрирующая модель еще одного примера управляющего модуля. Управляющий модуль представляет собой модуль с замкнутым контуром регулирования, который образован витком прямой связи и витком обратной связи, то есть обратная связь по полученной информации по углу отклонения троса учитывает и другие переменные, такие как сигнал контрольной скорости, заданной оператором, а также информацию, получаемую от датчика искажения угла, который измеряет влияние изменений скорости тележки и/или моста на сигнал датчика угла наклона. Учитываться может также и другая информация, которая не проиллюстрирована в данном примере. Представленный пример может также быть использован в разомкнутой системе управляющего модуля, управляемого напряжением или частотой, например, привода электродвигателя.
Согласно фиг. 2Е, управляющий модуль 203-е через интерфейс (на фиг. 2Е не показан) принимает от датчика угла наклона сигнал θ измеренного угла отклонения троса и подает его на вход фильтра 21 нижних частот, который предпочтительно является фильтром нижних частот второго порядка. Фильтр 21 нижних частот подавляет высокочастотный шум сигнала измеренного угла отклонения троса и выдает отфильтрованный сигнал θфнч. Для компенсации ошибки, вызванной ускорением крана и появляющейся в сигнале измеренного угла отклонения троса, отфильтрованный сигнал θфнч подают на вход устройства компенсации ускорения, которое в данном примере содержит вычитающее устройство 28, которое вычитает из отфильтрованного сигнала величину θа искажения угла от датчика искажения угла, установленного на тележке (указанный датчик не измеряет угол отклонения троса). Полученный таким образом скорректированный сигнал угла θкор затем подают на вход устройства 31 наблюдения за раскачиванием. Устройство наблюдения за раскачиванием в качестве еще одного входного сигнала принимает ускорение «а», причем в данной схеме сигнал ускорения «а» получают в результате перемножения в усилителе 29′ коэффициента с-1 компенсации и сигнала θа искажения угла с тележки. Как говорилось выше, устройство наблюдения за раскачиванием выдает сигнал расчетного угла θрас раскачивания, рассчитанного с использованием формул (1) и (2). Сигнал расчетного угла раскачивания подают на вход устройства 35 обработки команд. В данном случае, другими входными сигналами устройства 35 обработки команд являются команды vкон0 управления от оператора и скорректированный сигнал угла θкор. Устройство 35 обработки команд использует команды управления от оператора и либо сигнал расчетного угла θрас раскачивания, либо скорректированный сигнал угла θкор, что будет рассмотрено ниже со ссылкой на фиг. 4, 5 и 14. Модифицированные команды управления «м-ку», выданные устройством обработки команд, подают на вход устройства 26-е управления скоростью, обеспечивающего на выходе сигнал Τ инструкции по перемещению крана, например, крутящего момента, для механизма 27 крана.
В примере на фиг. 2Е управляющий интерфейс устройства 26-е управления скоростью является цифровым, причем указанное устройство получает модифицированные команды управления «м-ку» в особом цифровом формате.
Преимущество такого подхода состоит в том, что в большинстве существующих кранов команды управления от оператора (от подвесного пульта, радиоуправления или джойстика) подают в частотные приводы через такой цифровой интерфейс. Модернизация крана и его оснащение управляющим модулем, изображенным на фиг. 2Е, для обеспечения в существующем кране новых функций управления, оказывается эффективной по затратам, поскольку нет необходимости в замене органов управления скоростью (частотных преобразователей), так как новое устройство обработки команд способно обмениваться данными с существующими приводами через цифровой интерфейс. Более того, нет необходимости в замене существующей проводки между устройством, принимающим команды оператора, и частотными приводами, при этом между указанными устройствами просто устанавливают устройство обработки команд для добавления в систему развитых логических функций.
Одним из широко используемых способов цифрового управления является способ управления посредством электронного потенциометра. При управлении посредством электронного потенциометра, каждым направлением движения крана управляют по трем цифровым линиям, каждая из которых имеет три состояния. Указанные состояния также соответствуют нажимным кнопкам двухступенчатого управления в контроллере оператора. Первое состояние является состояние «стоп» (кнопка отпущена). Данное состояние активирует замедление движения до его полной остановки. Состояние «разгон» (кнопка полностью нажата) активирует ускоренное движение, пока не будет достигнута максимальная скорость. В состоянии «медленно» (кнопка нажата наполовину) движение либо ускоряется, либо замедляется, пока не будет достигнута заданная низкая скорость. Три линии, используемые для цифрового управления, представляют собой линию S1 (направление 1), линию S2 (направление 2) и линию АС (разгон). Направления 1 и 2 являются противоположными, так, например, тележка может двигаться либо в направлении 1, либо в направлении 2 (вдоль моста вперед или назад). Ниже при описании некоторых функций будет использоваться следующая система записи:
S1=1: выбрано направление 1
S1=0: отменено направление 1
S1=s1: сохранено выбранное направление 1 предыдущего режима
S2=1: выбрано направление 2
S2=0: отменено направление 2
S2=s2: сохранено выбранное направление 2 предыдущего режима
АС=1: активировано состояние разгона
АС=0: активировано состояние остановки
АС=ас: активировано состояние медленного движения
Например, управляющий сигнал (S1=1, S2=0, АС=1) означает, что движение в направлении 1 будет ускорено. Другой управляющий сигнал (S1=s1, S2=s2, АС=ас) означает, что направление движения меняться не будет, и что в текущем направлении задано состояние «медленно» (с уменьшением скорости).
Согласно другому варианту осуществления настоящего изобретения, основанному на фиг. 2Е, скорректированную информацию по углу не подают на вход устройства 35 обработки команд. Согласно еще одному варианту осуществления настоящего изобретения, основанному на фиг. 2Е, устройство 31 наблюдения за раскачиванием и усилитель 29′ не включены, при этом указанный рассчитанный угол θрас раскачивания не вычисляют и не подают на вход устройства 35 обработки команд.
Следует понимать, что вместо приема информации об искажении угла, величину ускорения можно получить в соответствии с любым из способов, описанных со ссылкой на фиг. 2А-2D.
На фиг. 3 представлены результаты, полученные посредством экспериментальной установки, а также проиллюстрировано, как изменение скорости крана влияет на правильность результатов измерения угла. В экспериментальной установке инклинометр жестко закреплен на тележке, так что исключена возможность изменения фактического угла. Тележку разгоняют вперед с ускорением 0,4 м/с2, далее перемещают вперед с постоянной скоростью, затем меняют направление движения, перемещают назад с постоянной скоростью и, наконец, замедляют до полной остановки. Хотя фактический угол остается одним и тем же, измеренная величина угла меняется. Кривая на фиг. 3 показывает ошибку угла, то есть искажение угла. Как можно видеть, абсолютная величина ошибки угла составляет приблизительно 0,04 рад при ускорении, изменении направления движения и замедлении. Таким образом, устройство компенсации ускорения может быть использовано для коррекции ошибок угла, вызванных изменением скорости. Ошибка угла, полученная посредством экспериментальной установки, может быть использована для определения коэффициента «с» усиления компенсации для датчиков, используемых соответствующим образом. В приведенном примере, коэффициент «с» усиления компенсации ускорения выбран равным 0,1 с2/м ((0,04 рад) / (0,4 м/с2)=0,1 с2/м).
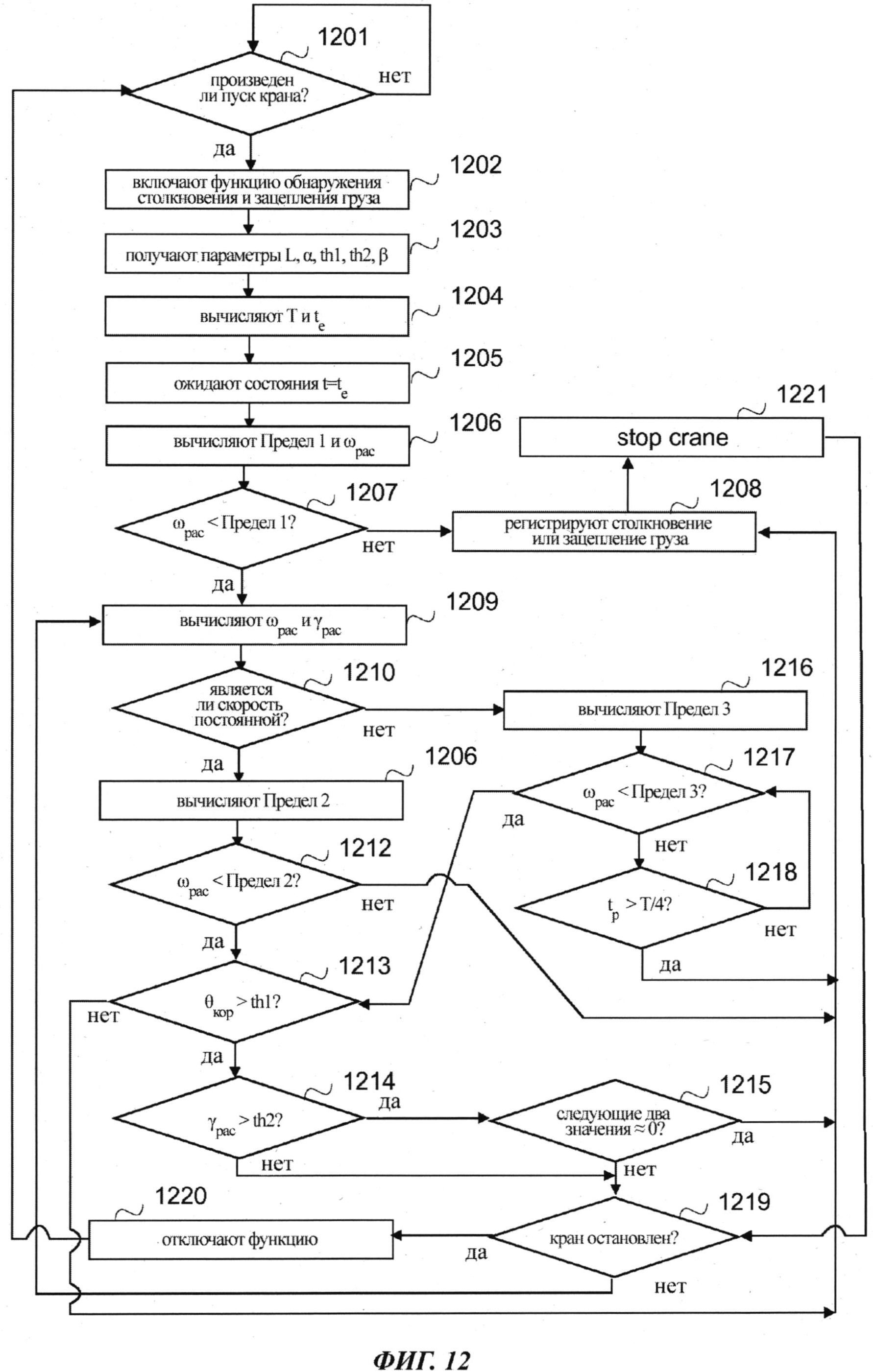
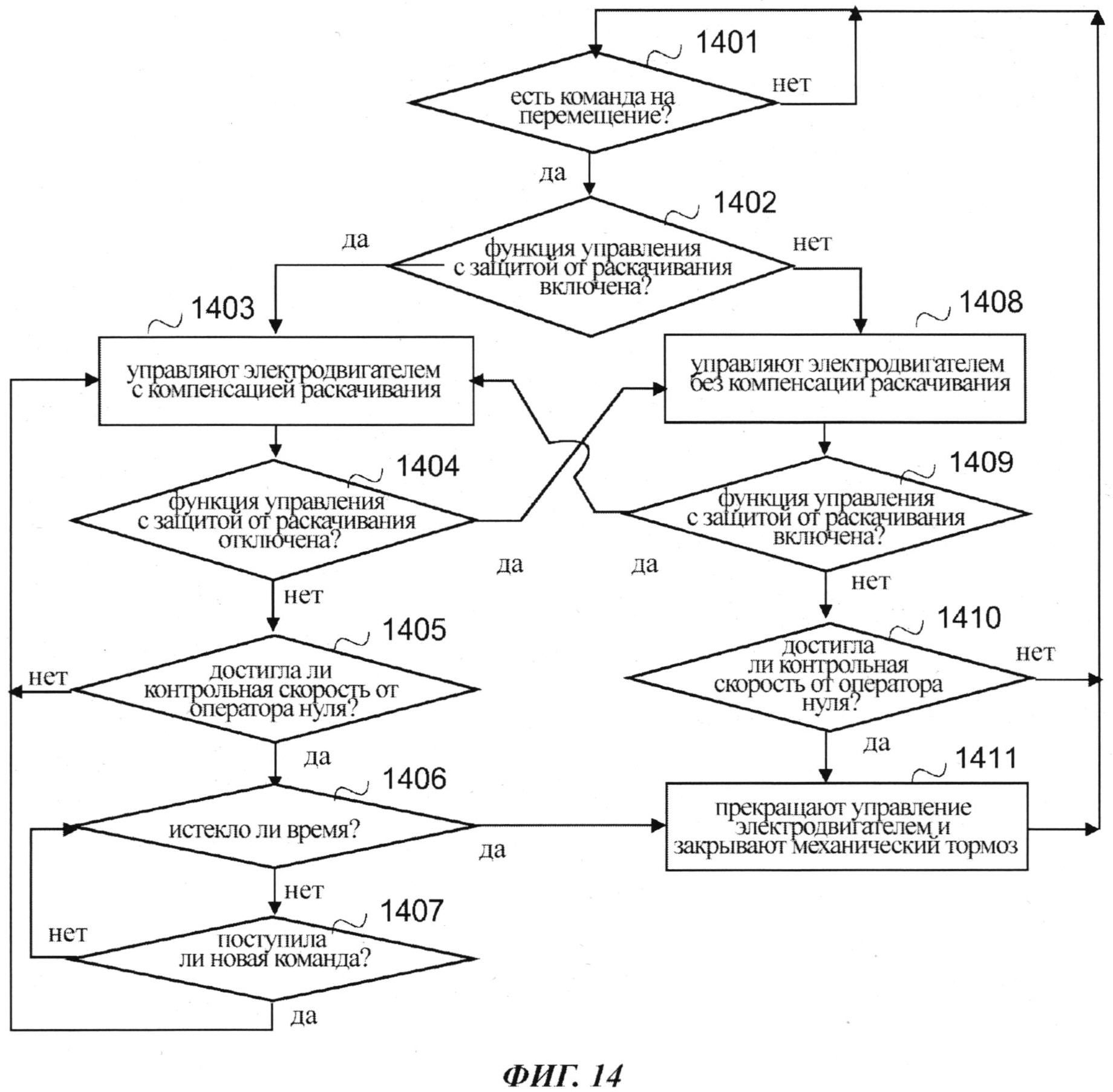
Далее будут описаны функциональные возможности различных видов управляющих модулей, в частности различные виды функций управления, в которых используются информация обратной связи, полученная раскрытыми выше способами. Функции управления, использующие управляющий модуль, раскрытый на фиг. 2В и 2С, будут описаны со ссылкой на фиг. 4, 5 и 8. Функции управления, использующие управляющий модуль, раскрытый на фиг. 2А, будут описаны со ссылкой на фиг. 9 и 11. Функции управления, использующие управляющий модуль, раскрытый на фиг. 2С, будут описаны со ссылкой на фиг. 9-11. А функции управления, использующие управляющий модуль, раскрытый на фиг. 2D и 2Е, будут описаны со ссылкой на фиг. 12-14. Однако, следует понимать, что каждая функция может использовать структуру, раскрытую на фиг. 2D и 2Е. На фиг. 16 показана блок схема, основанная на одном или более управляющих модулях, описанных со ссылкой на фиг. 2А-2Е.
Некоторые функции, которые будут описаны ниже, могут потребовать наличия информации о длине троса. Однако, как говорилось выше, достаточно использовать оценку, даже приблизительную оценку длины троса.
Ручное сопровождение груза
Сопровождать груз вручную означает «перемещать кран вместе с крюком» или «идти вместе с краном». Данная функция позволяет перемещать кран, буксируя крюк и, соответственно, кран вручную. Например, когда крюк свободен от груза, его установка рукой будет быстрее и точнее по сравнению с его позиционированием посредством устройства управления оператора, такого как джойстик или пульт с кнопками. Кроме того, когда на крюке подвешен груз, возможно возникновение ситуаций, когда позиционировать груз рукой более удобно, чем устанавливать его посредством устройства управления оператора, причем подобное позиционирование снижает вероятность несчастных случаев при работе с краном, особенно в таких ситуациях, когда оператор держит груз одной рукой, а другой рукой работает с устройством управления. Оператор часто находится рядом с крюком и может манипулировать мостом и/или тележкой - просто тянуть или толкать крюк или груз, таким образом, полностью сосредоточившись на грузе и не подглядывая в дисплей, показывающий координаты на пульте управления. В частности, если дисплей расположен на мосту, оператор должен смотреть либо на груз, либо на дисплей, что увеличивает риск несчастного случая.
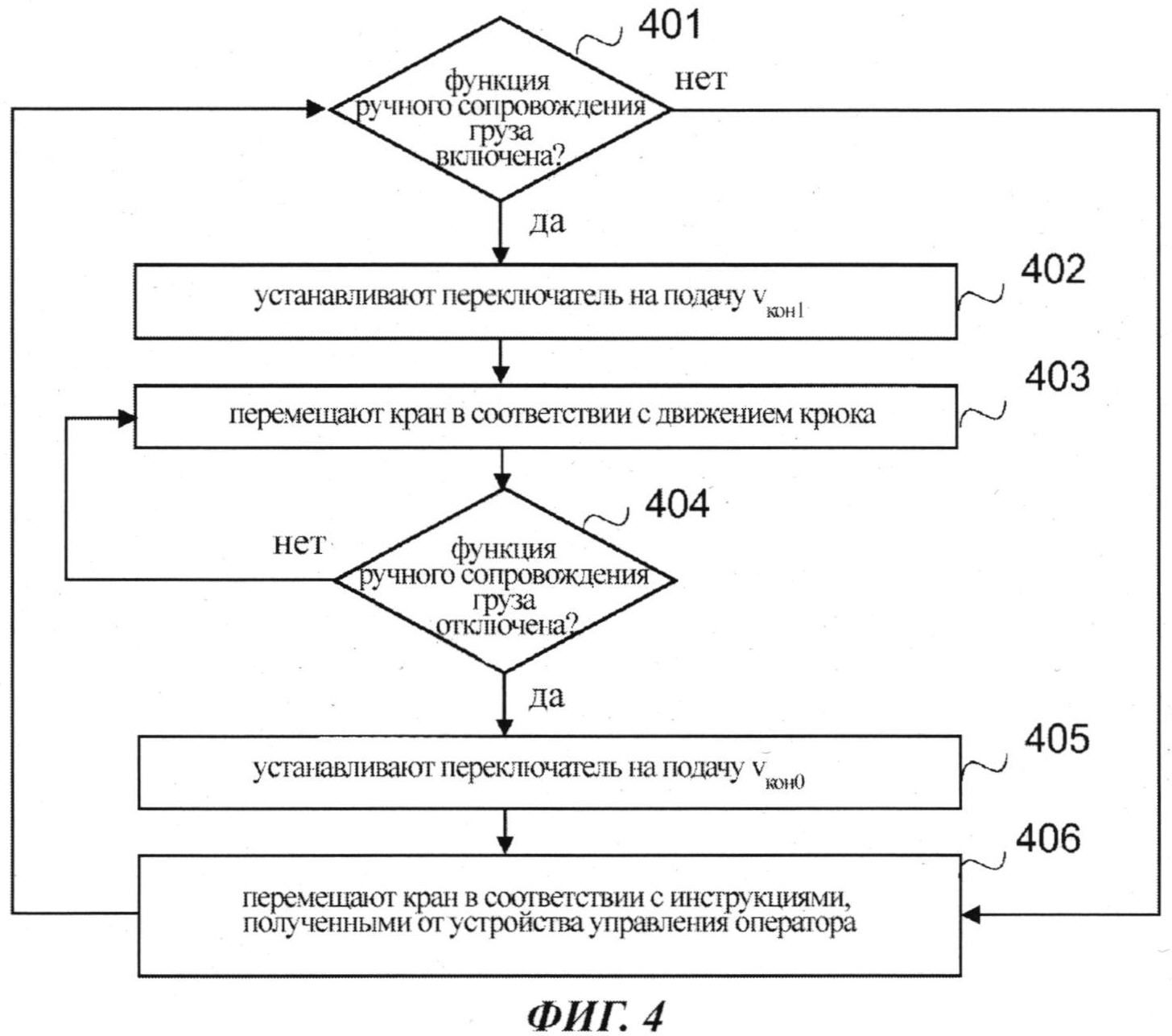
На фиг. 4 проиллюстрирован пример работы управляющего модуля крана при ручном сопровождении груза. По существу, когда оператор нажимает кнопку или задает джойстику команду «ручного сопровождения груза», переключатель 24, показанный на фиг. 2В и 2С, переходит в положение, при котором первую контрольную скорость используют в качестве контрольной скорости, при этом кран перемещается, если только нажата кнопка, или в другом варианте осуществления настоящего изобретения - при условии, что кнопку нажмут снова, или если будет задана соответствующая команда на «запрет ручного сопровождения груза» посредством кнопки или джойстика, после чего переключатель переходит в положение, при котором используют нормальную контрольную скорость. Кроме того, в одном из вариантов осуществления настоящего изобретения, функция «ручного сопровождения груза» может быть активной в течение предварительно заданного промежутка времени, например, 5 с, после чего кнопку отпускают/нажимают снова или дают команду на «запрет ручного сопровождения груза». Кроме того, предусмотрена возможность, чтобы функция «ручного сопровождения груза» автоматически отключалась сама по прошествии предварительно заданного промежутка времени с момента ее включения, если данная функция не была отключена ранее.
Согласно фиг. 4 управляющий модуль на этапе 401 проверяет, включил ли оператор функцию «ручного сопровождения груза». Если включение функции обнаружено, то на этапе 402 упомянутый переключатель устанавливают так, что на устройство управления поступает значение первой контрольной скорости vкон1 или скорости, полученной на ее основе, при этом на этапе 403 кран перемещают в соответствии с движением крюка. Другими словами, оператор может тянуть или толкать крюк или груз на крюке, а кран будет двигаться соответственно, благодаря тому, что инклинометр выдает сигнал обратной связи по углу. Если оператор не будет перемещать крюк (или груз), то кран также не будет двигаться. Кроме того, на этапе 404 проверяют, отключил ли оператор функцию «ручного сопровождения груза». Если нет, то процесс переходит на этап 403, на котором кран перемещают в соответствии с движением крюка.
Если на этапе 404 обнаружено отключение функции «ручного сопровождения груза», то на этапе 405 переключатель устанавливают таким образом, что на вход устройства управления поступает значение нормальной контрольной скорости vкон0 или скорости, полученной на ее основе, а на этапе 406 кран перемещают в соответствии с инструкциями, полученными от устройства управления оператора.
Если на этапе 401 оператор не включает функцию «ручного сопровождения груза», то процесс переходит на этап 406, на котором кран перемещают в соответствии с инструкциями, полученными от устройства управления оператора (поскольку на устройство управления поступает значение нормальной контрольной скорости или скорости, полученной на ее основе).
Следует понимать, что в зависимости от варианта осуществления настоящего изобретения, можно блокировать движение в направлении перемещения тележки или в направлении перемещения моста или же можно допустить движение в обоих направлениях.
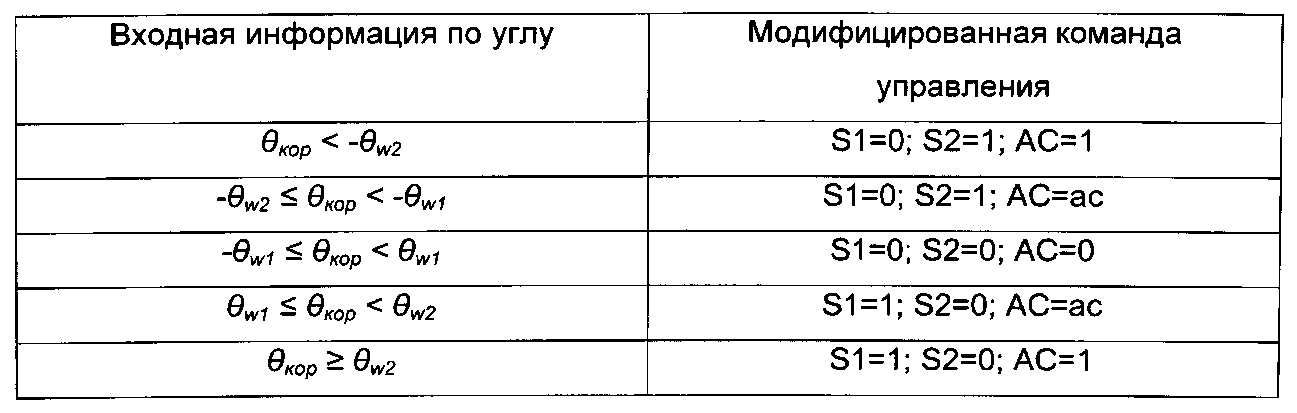
Согласно другому варианту осуществления настоящего изобретения, при ручном сопровождении груза используют управляющий модуль, изображенный на фиг. 2Е. Основное отличие от вышеописанного варианта заключается в том, что устройство обработки команд вместо контрольной скорости вычисляет модифицированные команды управления. В результате, вместо установки переключателя на этапе 402, блок обработки команд для формирования модифицированных команд начинает использовать скорректированную информацию по углу. Приведенная ниже таблица показывает, как формируются значения S1, S2 и АС, которые содержит модифицированная команда управления. Предельные значения θw1 и θw2 определены экспериментально. Когда S1=0 и S2=0, кран останавливается.
Если функция «ручного сопровождения груза» выключена, то вместо установки переключателя на этапе 405 устройство обработки команд для формирования модифицированных команд управления начинает использовать информацию по расчетному углу раскачивания, например, способом, который будет рассмотрен ниже со ссылкой на фиг. 14, или просто передает значение контрольной скорости vкон0, полученное от устройства управления оператора, в устройство 26-е управления скоростью, в зависимости от установочных параметров оператора.
Как видно из вышесказанного, функция «ручного сопровождения груза» обеспечивает простой и удобный способ управления краном, при котором кран следует за оператором, независимо от направления, в котором идет оператор, повторяя при этом криволинейную траекторию движения оператора. Этого достигают за счет нажатия одной кнопки, которая включает данную функцию. Кроме того, данная функция обеспечивает точное, быстрое и простое конечное позиционирование груза, повышая эффективность процесса по сравнению с традиционным способом управления, который позволяет управлять движением только посредством устройства управления оператора. Дополнительное преимущество состоит в том, что исключается вероятность получения ошибочной управляющей информации, когда оператор путает направления или случайно нажимает не на ту кнопку.
Уменьшение бокового перекоса троса
Функция уменьшения бокового перекоса троса представляет собой функцию управления, которая обеспечивает выравнивание тележки и/или моста по существу над грузом до момента поднятия груза, то есть тележку и/или мост перемещают таким образом, что крюк будет находиться над центром тяжести груза. В данной функции управления использован тот факт, что, когда информация об угле θ отклонения троса указывает на то, что разность между фактическим углом троса и искомым углом отличается от нуля, управляющий модуль, подобный модулю с фиг. 2В или фиг. 2Е, будет осуществлять движение в направлении, при котором разность между фактическим углом троса и искомым углом троса будет уменьшаться до тех пор, пока фактический угол троса не станет равным искомому углу. Как говорилось выше, искомый угол представляет собой это угол, при котором груз расположен по существу под тележкой и/или мостом.
В последующем описании выражение «трос расположен достаточно вертикально» означает, что угол отклонения троса не отличается от искомого угла более, чем на малую величину, например, более, чем на 0,05°. Указанная величина на практике зависит от разрешающей способности датчика угла наклона и точности, а также характеристик, которые требуются от рассматриваемой функции.
В некоторых случаях, в зависимости от конкретного места установки датчика, запасовки троса и максимальной высоты подъема, на искомый угол может также влиять длина троса. В этом случае, искомый угол может быть измерен при вводе крана в эксплуатацию или модернизации крана, например, путем подъема крюка в вертикальном направлении, без какого-либо раскачивания, от максимальной длины троса до минимальной длины троса, при этом результаты измерений угла и длины троса или расчетные величины могут быть сохранены. Такое измерение обеспечивает корректное значение заданного угла для длин троса, используемых при выполнении любой из описанных функций.
На фиг. 5 проиллюстрирован пример функции, основанной на использовании управляющего модуля, изображенного на фиг. 2В, в соответствии с вариантом осуществления настоящего изобретения, обеспечивающим три различные функции уменьшения бокового перекоса троса, в частности: базовое уменьшение бокового перекоса троса (пример показан на фиг. 6), комбинацию автоматического ориентирования крана и уменьшения бокового перекоса троса (пример показан на фиг. 7) и тандемное уменьшение бокового перекоса троса для тележки (пример для двух тележек представлен на фиг. 8). Следует понимать, что в других вариантах осуществления настоящего изобретения может быть реализована только одна или две из указанных трех различных функций уменьшения бокового перекоса троса, при этом этапы процесса, относящиеся только к нереализуемой функции, из алгоритма исключаются. Выравнивание крана точно над грузом вручную оператором занимает много времени и иногда, когда оператор сидит в кабине крана, даже невозможно видеть, находится ли груз точно под краном, особенно при использовании двух тележек. Функция уменьшения бокового перекоса троса выполняет указанное выравнивание автоматически.
Согласно фиг. 5, управляющий модуль на этапе 500 проверяет, включена ли функция уменьшения бокового перекоса троса. В зависимости от варианта осуществления настоящего изобретения, указанная функция может быть включена оператором, предпочтительно непосредственно перед подъемом груза, и/или она может быть включена управляющим модулем без команды оператора. Управляющий модуль выполнен с возможностью включения данной функции без команды оператора в ответ на обнаружение того, что натяжение троса или тросов превышает заданный пороговый уровень. Натяжение тросов может быть измерено посредством одного или нескольких датчиков силы, динамометрических преобразователей или тензометрических датчиков, или же путем контроля тока подъемного электродвигателя и обнаружения резкого увеличения тока подъемного электродвигателя, что хорошо известно специалистам в данной области. Натяжение тросов можно также обнаружить путем приема результатов измерения веса груза через интерфейс. Если информация о весе груза недоступна для получения от крана через интерфейс, то вышеупомянутые датчики, в частности динамометрические преобразователи, можно легко установить на имеющийся кран для определения натяжения тросов. Преимущество автоматического включения такого типа заключается в том, что оно предотвращает ненадлежащее использование крана, например, использование мостового или козлового крана для буксировки предметов, например, испорченного вилочного подъемника, что может вызвать напряжения, превышающие прочность крановых конструкций. Другое преимущество состоит в том, что если нагрузка не обнаружена, то не происходит противодействие подъему, что обеспечивает высокие потребительские свойства крана при всех обстоятельствах, даже если тросы смещены из-за того, что, например, крюк перед подъемом лежит на столе.
Если на этапе 500 обнаружено, что функция уменьшения бокового перекоса троса включена, то на этапе 501 указанный переключатель устанавливают так, что на устройство управления подают значение первой контрольной скорости vкон1 или значение, полученное на основе указанной скорости. Затем, на этапе 502 проверяют, выбрано ли автоматическое ориентирование крана. К примеру, оператор мог нажать кнопку для автоматического ориентирования крана.
Если на этапе 502 установлено, что автоматическое ориентирование крана выбрано, то на этапе 503 проверяют, равен ли фактический угол троса или почти равен искомому углу (см. ниже). Если тележка и мост уже находятся непосредственно над грузом, то может быть осуществлен безопасный подъем груза. Соответственно, отключают функцию уменьшения бокового перекоса троса, а на этапе 510 переключатель устанавливают в положение, при котором на устройство управления подают значение нормальной контрольной скорости vкон0, или значение, полученное на основе указанной скорости. При этом на этапе 511 кран перемещают в соответствии с инструкциями, полученными от устройства управления оператора (поскольку на управляющий модуль поступает сигнал нормальной контрольной скорости).
Если на этапе 503 обнаружено, что фактический угол троса не равен искомому углу и не близок к нему, то на этапе 504 подъем груза прекращают. Затем на этапе 505 проверяют, включена ли функция уменьшения бокового перекоса троса для работы в тандемном режиме. Если функция включена для работы в тандемном режиме, то в рассматриваемом примере функцию уменьшения бокового перекоса троса для направления, в котором движется мост, на этапе 506 выключают. Это позволяет учесть тот факт, что груз может иметь такелажные точки, которые по-разному выровнены в направлении движения моста, в результате чего может оказаться невозможным правильно выровнять мост. Следует понимать, что по-прежнему возможно обнаружение бокового перекоса троса в направлении движения моста и что для оператора может быть предусмотрена аварийная сигнализация (например, световая или звуковая) и/или, если будет установлено, что боковой перекос троса в направлении движения моста превышает предел безопасности для указанного направления, то подъем может быть прекращен. Однако, на фиг. 5 это не показано. Если функция уменьшения бокового перекоса троса включена не для работы в тандемном режиме, то этап 506 пропускают. Тогда в обоих случаях, без участия оператора, на этапе 507 кран перемещают в том направлении, при котором произойдет уменьшение разности между фактическим углом троса и искомым углом. Между тем, на этапе 508 контролируют, является ли фактический угол троса равным искомому углу. Движение крана останавливают, когда разность углов станет равной нулю или будет близка к нулю. Если на этапе 508 обнаружено, что фактический угол троса отличается от искомого угла, то процесс переходит на этап 507, а кран продолжает двигаться. Если на этапе 508 кран остановился или останавливается, значит, тележка расположена непосредственно над грузом (а в случае, если не используют тандемный режим, то и мост расположен над грузом), и груз можно безопасно поднимать. Соответственно, на этапе 509 осуществляют подъем груза, при этом на этапе 510 переключатель устанавливают так, что на устройство управления поступает значение нормальной контрольной скорости vкон0 или значение, полученное на ее основе. Таким образом, на этапе 511 кран перемещают в соответствии с инструкциями, полученными от устройства управления оператора (поскольку на устройство управления подают сигнал нормальной контрольной скорости или скорости, полученной на ее основе). Установка переключателя на этапе 510 отключает функцию уменьшения бокового перекоса троса. Если направление движения моста на этапе 506 было отменено, то на этапе 509 оно будет снова задействовано.
Если автоматическое ориентирование крана не выбрано (проверка на этапе 502), то процесс переходит на этап 510 для подачи на устройство управления сигнала нормальной контрольной скорости vкон0 или скорости, полученной на ее основе. Следует понимать, что в ином варианте осуществления настоящего изобретения оператор может отключать автоматическое ориентирование крана на любом этапе процесса. Согласно еще одному варианту осуществления настоящего изобретения, отключение автоматического ориентирования крана выполняют в ответ на обнаружение того, что груз находится в воздухе.
Если на этапе 500 обнаружено, что функция уменьшения бокового перекоса троса не включена, то на этапе 511 кран перемещают в соответствии с инструкциями, полученными от устройства управления оператора (поскольку на устройство управления подают сигнал нормальной контрольной скорости, или скорости, полученной на ее основе), пока не будет включена функция уменьшения бокового перекоса троса.
Если применяют управляющий модуль, показанный на фиг. 2Е, то на этапе 501 устройство обработки команд для формирования модифицированных команд управления начинает использовать скорректированную информацию по углу, как было описано выше со ссылкой на фиг. 4. На этапе 507 кран перемещают в соответствии с модифицированными командами управления, описанными выше со ссылкой на фиг. 4. Далее, на этапе 510 устройство обработки команд для формирования модифицированных команд управления начинает использовать информацию по расчетному углу раскачивания, например, так, как будет рассмотрено ниже со ссылкой на фиг. 14, причем на этапе 511 кран перемещают в соответствии с указанными модифицированными командами.
Согласно другому варианту осуществления настоящего изобретения, в тандемном режиме направление движения моста не отменяется, однако мост перемещают так, чтобы минимизировать угол отклонения троса в направлении движения моста.
Следует понимать, что автоматическое ориентирование крана можно запускать и другими способами, например, в ответ на обнаружение управляющим модулем того, что подъем груза происходит так, что часть груза все еще опирается на землю.
На фиг. 6 проиллюстрировано базовое уменьшение бокового перекоса троса, когда искомый угол соответствует вертикали. Согласно фиг. 6, в фазе а) обнаруживают перекос и включают функцию, так что в фазе b) тележка и мост автоматически перемещаются в направлении уменьшения угла отклонения троса. В результате, происходит коррекцию углов в направлении движения тележки и моста так, что они соответствуют вертикали, как показано в фазе с), где груз готов к подъему. В фазе d) осуществляют подъем груза.
На фиг. 7 проиллюстрировано сочетание автоматического ориентирования крана и уменьшения бокового перекоса троса. Данный режим обеспечен благодаря функции уменьшения бокового перекоса троса и тому факту, что груз, поднятый с одного конца, при подъеме вызывает отклонение троса от вертикали (вынужденный перекос). Такой режим позволяет оператору поднимать грузы неудобной формы, например, большие стальные плиты. Как видно из фиг. 7, перекос, вызванный изменением ориентации груза, компенсируется в фазах а), b) и с) за счет автоматического перемещения тележки и моста в направлении, при котором происходит уменьшение угла отклонения троса, и за счет одновременного подъема одного конца груза. В результате, происходит коррекция угла отклонения троса в направлении движения тележки и моста так, что он становится равным искомому углу. Когда искомый угол достигнут, а подъем груза завершен, груз в фазе d) окажется непосредственно под тележкой и будет готов к перемещению.
На фиг. 8 проиллюстрировано тандемное уменьшение бокового перекоса троса, когда одновременно перемещают две или несколько тележек, расположенных на одном и том же мосту. К другим примерам тандемного использования относятся: совместное перемещение двух или нескольких кранов, совместное перемещение двух или нескольких кранов, когда по меньшей мере один из кранов содержит две или несколько тележек, расположенных на одном и том же мосту, при этом указанные тележки способны двигаться совместно и вместе с тележками другого крана. Например, может быть предусмотрена крановая система, состоящая из двух кранов, каждый из которых имеет по две тележки, причем каждая тележка содержит по меньшей мере один датчик угла наклона. В каждой тележке или в каждом кране может быть предусмотрен управляющий модуль, или же система может содержать общий управляющий модуль, принимающий информацию обратной связи по углам от датчиков угла наклона.
При тандемном уменьшении бокового перекоса базовое уменьшение перекоса осуществляют в направлении движения тележки, для каждой тележки отдельно, как показано в фазе а). Когда обе тележки скорректируют угол отклонения троса в направлении своего движения, а углы станут соответствовать вертикали, то в фазе b) груз будет готов к подъему, а в фазе с) груз будет поднят в соответствии с инструкциями оператора.
Хотя на фиг. 6 и 8 показано только движение тележек, следует понимать, что возможно перемещение и тележки, и моста.
Как видно из вышеприведенных примеров, к преимуществам, обеспечиваемым функцией уменьшения бокового перекоса троса, относится простое позиционирование крана, поскольку кран автоматически позиционируется непосредственно над грузом, подлежащим подъему, а также предотвращение несчастных случаев по вине оператора, вызванных опасным перекосом троса. Подъем груза из положения с перекосом троса приводит к появлению напряжений в кране и инициирует раскачивание груза, что, в свою очередь, представляет опасность для груза, для людей и для других механизмов и предметов вблизи места подъема. Все это исключается благодаря функции уменьшения бокового перекоса троса.
Сигнализация бокового перекоса
Сигнализация бокового перекоса представляет собой функцию, оповещающая оператора крана о том, что тросы перекошены, то есть груз не находится непосредственно под тележкой. Хотя конструкция кранов допускает заданную величину перекоса, тем не менее, при подъеме груз следует довольно точно выровнять под тележкой, чтобы избежать ненужных напряжений в кране, которые в наихудшем случае могут привести к поломке крана. Например, направляющая троса или сам трос могут сломаться из-за напряжений, вызванных повторяющимися перекосами, или же трос может выскочить из канавки барабана и оказаться перерезанным. Боковой перекос также представляет угрозу безопасности, поскольку после подъема груз может начать раскачиваться, если перед подъемом он не был надлежащим образом выровнен под краном. Точное выравнивание крана над грузом требует времени, причем иногда, когда оператор сидит в кабине крана, невозможно увидеть, точно ли расположен груз под краном. Сигнализация перекоса облегчает определение того, находится ли груз под краном, и достаточно ли вертикально он расположен.
На фиг. 9 проиллюстрирован пример работы управляющего модуля, когда функция сигнализации перекоса, то есть функция оповещения, включена. Сигнализация перекоса может быть включена оператором посредством устройства управления оператора всякий раз, когда оператор хочет знать, надлежащим ли образом выровнены груз и тележка. Обычно это случается после присоединения груза к крюку (или к другим средствам захвата, используемым для крепления груза к крану), когда оператор уже натянул тросы перед подъемом груза. Когда тросы натянуты, инклинометр выдает надежную информацию о выравнивании груза относительно моста и тележки крана. Управляющий модуль может включить сигнализацию перекоса без команды от оператора в ответ на обнаружение того, что натяжение троса или тросов превосходит заданный пороговый уровень. Преимущество автоматического включения состоит в том, что сигнализация облегчает обнаружение риска подъема груза при боковом перекосе тросов.
Согласно фиг. 9, управляющий модуль проверяет, включена ли функция сигнализации бокового перекоса. Если на этапе 901 обнаружено, что функция сигнализации перекоса включена, то на этапе 902 сравнивают углы θфнч троса (изначально полученные от инклинометра), обработанные в фильтре нижних частот и измеренные в направлениях движения тележки и моста, с предельными значениями. Примеры предельных значений будут приведены ниже при описании фиг. 11. Предельные значения предпочтительно предварительно сохраняют в память управляющего модуля, причем указанные значения можно изменять. Предельные значения предпочтительно учитывают тип крана и его характеристики, которые обычно допускают заданный угол перекоса при подъеме груза. Если на этапе 903 обнаружено, что полученные значения углов находятся в установленных пределах, то на этапе 904 функцию сигнализации отключают. Затем на этапе 901 снова проверяют, включена ли функция сигнализации. В зависимости от варианта осуществления настоящего изобретения, если принимаемые значения углов находятся в установленных пределах, то на устройство управления оператора после выполнения этапа 903 может быть передана информация о том, что все в порядке.
Если на этапе 903 обнаружено, что принятое значение угла находится вне установленных пределов, то на этапе 905 может быть включено оповещение. В зависимости от варианта осуществления и параметров системы, сформированное оповещение может быть передано на устройство управления оператора (то есть на пользовательский интерфейс 34 на фиг. 2А или 2С), или контроллер сам может служить интерфейсом оповещения оператора. Интерфейс оповещения оператора может воспроизвести звук, включить световой индикатор или индикаторы в соответствующих местах или точках пользовательского интерфейса, включить вибрацию, вывести на дисплей предупреждающее сообщение или изображение, и прочее, или же обеспечить комбинацию перечисленных средств. Другими словами, могут быть использованы любые средства оповещения. После этого, на этапе 906 проверяют, поднят ли груз в воздух. Если груз уже поднят, то процесс переходит на этап 904 для выключения функции сигнализации перекоса, поскольку после того, как груз был поднят в воздух, отпадает необходимость в подаче сигнала «пожалуйста, откорректируйте положение груза перед его подъемом». Если на этапе 906 обнаружено, что груз еще не был поднят, то процесс переходит на этап 902 для сравнения углов. Таким образом, функция сигнализации обеспечивает оповещение все время, пока груз не будет расположен достаточно вертикально под тележкой или пока не произойдет подъем груза.
Предотвращение бокового перекоса
Функция предотвращения бокового перекоса не позволяет подъемному механизму или крану перемещаться в направлениях, в которых боковой перекос, если таковой имеет место, увеличивается. Тем самым, данная функция также позволяет легко преодолеть проблемы, вызванные боковым перекосом, которые обсуждались выше в связи с функцией сигнализации бокового перекоса.
На фиг. 10 проиллюстрирован пример работы управляющего модуля, если на этапе 1001 обнаружено, что включена функция предотвращения бокового перекоса. Данная функция может быть включена так же, как и функция сигнализации бокового перекоса, то есть оператором и автоматически или только оператором или только автоматически, как было рассмотрено выше со ссылкой на фиг. 9.
Если на этапе 1001 обнаружено, что функция предотвращения перекоса включена, то на этапе 1002 сравнивают угол θфнч отклонения троса (изначально полученный от инклинометра), обработанный в фильтре нижних частот и измеренный для направлений движения тележки и/или моста, с предельными значениями. Примеры предельных значений будут приведены ниже при описании фиг. 11. Так же, как и для функции сигнализации перекоса, в предпочтительном случае, предельные значения предварительно сохраняют в память управляющего модуля, причем указанные значения можно изменять. Предельные значения для функции сигнализации перекоса могут отличаться от предельных значений для функции предотвращения перекоса, или же для обеих функций могут быть использованы одни и те же предельные значения.
Если на этапе 1003 обнаружено, что полученное значение угла находится вне установленных пределов, то на этапе 1004 определяют направления, в которых можно перемещать кран, при этом на этапе 1005 одно или несколько направлений, в которых кран перемещать нельзя, отменяют для подъема, а также для движения тележки и/или моста, а остальные одно или несколько направлений, в которых кран перемещать можно, задействуют (или оставляют задействованными, если они не были отменены ранее). Таким образом, на этапе 1005 используют результат вычисления, выполненного на этапе 1004. При этом вычисляют направления, в которых угол троса уменьшается, а не увеличивается относительно искомого угла. Кран может двигаться в направлениях, которые не отменены, что позволяет уменьшить угол отклонения троса. Отмененные направления представляют собой направления, в которых боковой перекос увеличивается. Например, в ситуации, показанной на фиг. 6 в фазе а) отмененными направлениями были бы: для крана - направление влево, а для груза - направление подъема. В рассматриваемом примере информацию об отмененных и задействованных направлениях, то есть разрешенных и исключенных направлениях, на этапе 1006 передают далее, на устройство управления оператора (то есть на пользовательский интерфейс 34 на фиг. 2А и 2С). Затем, на этапе 1007 проверяют, включена ли функция предотвращения перекоса. Функция предотвращения перекоса может быть выключена по тем же причинам, что и функция сигнализации перекоса. Если функция включена, то процесс переходит на этап 1002 для сравнения значений углов с предельными значениями. Если функция предотвращения перекоса выключена, то на этапе 1010 проверяют, имеются ли отмененные направления. Если отмененные направления имеются, то на этапе 1011 указанные направления задействуют, тем самым, обеспечивая подъем груза и движение тележки и/или моста в любых направлениях. После этого, или если на этапе 1010 отмененные направления не обнаружены, процесс переходит на этап 1001 для проверки того, включена ли функция предотвращения перекоса.
Если на этапе 1003 обнаружено, что полученные значения углов находятся в установленных пределах, то на этапе 1008 проверяют, имеются ли отмененные направления. Если отмененные направления имеются, то на этапе 1009 указанные направления задействуют, тем самым, обеспечивая подъем груза и движение тележки и/или моста в любых направлениях. Затем процесс переходит на этап 1006 для передачи информации о направлениях. Следует понимать, что, если на пользовательском интерфейсе не отображается никакой информации, это может означать, что нет отмененных направлений и что разрешено свободное перемещение.
Чтобы отменить и разрешить работу крана в одном или нескольких направлениях, управляющий модуль (или функция предотвращения перекоса) может быть соединен последовательно с различными концевыми переключателями. Другими словами, управление конкретным направлением связано с концевым переключателем (включено граничное положение), при этом кран не способен двигаться в конкретном направлении.
Согласно одному из вариантов осуществления настоящего изобретения, функция предотвращения перекоса включена все время, при этом этапы 1001 и 1008-1011 не выполняют, а процесс переходит от этапа 1006 на этап 1002.
В другом варианте осуществления настоящего изобретения этапы 1008 и 1010 исключают, при этом задействуют все направления независимо от того, были ли они отменены, когда функция предотвращения перекоса была отключена.
Помощник коррекции бокового перекоса троса
Функция помощника коррекции бокового перекоса троса представляет собой реализацию пользовательского интерфейса, которая помогает оператору перемещать кран в надлежащих направлениях. Указанная функция особенно полезна при работе с функцией сигнализации бокового перекоса троса и/или функцией предотвращения бокового перекоса троса. В принципе, управляющий модуль определяет, что необходимо отображать на интерфейсе сигнализирующего устройства, такого как устройство управления оператора (то есть на пользовательском интерфейсе 34 на фиг. 2А и 2С), а затем передает соответствующие сигналы на сигнализирующее устройство, или, если используются несколько сигнализирующих устройств для одного крана (или для одной тележки), то на сигнализирующие устройства, отображающие ту же самую информацию.
Сигнализирующее устройство может быть соединено с управляющим модулем посредством фиксированного или беспроводного соединения, при этом не существует никаких ограничений для расположения сигнализирующего устройства. Например, сигнализирующее устройство может быть установлено или встроено в тележку и/или крюк, и/или устройство управления оператора, и/или кабину крана. Преимущество расположения сигнализирующего устройства на крюке заключается в том, что оператору не нужно отводить взгляд от крюка и/или груза при его подъеме, что снижает риск столкновения и/или риск несчастного случая. Кроме того, если сигнализирующее устройство встроено в крюк, то оно может работать в качестве генератора электрической энергии и, тем самым, получать необходимую для своей работы энергию целиком за счет вращения шкивов троса. Один из примеров такого генератора раскрыт в документе DE 102009036480, содержание которого включено в настоящее описание посредством ссылки.
На фиг. 11 проиллюстрирована работа сигнализирующего устройства в одном из вариантов осуществления настоящего изобретения, в котором сигнализирующее устройство содержит пять световых индикаторов, например, пять светодиодов, которые можно зажигать в зависимости от измеренной и отфильтрованной информации по углу и предельных значений, приведенных в следующей таблице. Следует понимать, что предельные значения приведены только для примера и что могут быть использованы любые другие подходящие значения.

Границы, приведенные в таблице, могут быть использованы для функции сигнализации бокового перекоса троса (границы для сигнализации перекоса) и/или для функции предотвращения бокового перекоса троса (границы для предотвращения перекоса) в вышеприведенных примерах. Следует понимать, что указанные предельные значения могут быть заданы предварительно, при этом предпочтительно, чтобы их можно было менять.
Пример работы функции помощника коррекции бокового перекоса троса будет описан подробно со ссылкой на фиг. 11. Функция помощника коррекции бокового перекоса троса может быть отдельно включена/отключена, или она может быть автоматически включена/отключена в ответ на включение/отключение функции сигнализации бокового перекоса троса и/или функции предотвращения бокового перекоса троса, и/или в ответ на обнаружение натяжения тросов. Когда происходит включение функции помощника коррекции бокового перекоса троса, предполагается, что тросы натянуты.
Согласно фиг. 11, если на этапе 1101 функция помощника коррекции бокового перекоса троса включена, то на этапе 1102 скорректированную информацию по углу, то есть всякий раз текущее значение угла отклонения троса, сравнивают с предельными значениями, указанными в таблице. Если при проверке на этапе 1103 обнаружено, что текущий угол отклонения троса находится в диапазоне допустимых значений, как для тележки, так и для моста, то на этапе 1104 зажигается зеленый индикатор в центре сигнализирующего устройства. Он указывает, что отсутствует какой-либо недопустимый чрезмерный боковой перекос и что в этом отношении подъем безопасен. Затем процесс переходит на этап 1108 для проверки того, не отключена ли функция помощника коррекции бокового перекоса троса.
Если при проверке на этапе 1103 обнаружено, что текущий угол отклонения троса выходит по меньшей мере за одну границу диапазона допустимых значений, то на этапе 1105 зажигается соответствующий красный индикатор. Далее, на этапе 1106 для каждого угла, который не попал в диапазон допустимых значений, проверяют, находится ли текущий угол отклонения троса в границах для функции сигнализации бокового перекоса троса. Если угол находится в указанных границах, то процесс переходит на этап 1108 для проверки того, не отключена ли функция помощника коррекции перекоса. Горящий красный индикатор указывает оператору, что имеется боковой перекос и что кран не следует перемещать в направлении, которое указывает горящий красный индикатор. Следует понимать, что в другом варианте осуществления настоящего изобретения все остальные индикаторы могут светиться зеленым цветом, указывая рекомендуемые направления перемещения.
Если на этапе 1106 обнаружено, что по меньшей мере одно из текущих значений угла отклонения троса выходит за границы для функции сигнализации бокового перекоса троса, но при этом текущий угол отклонения троса находится в границах для функции предотвращения бокового перекоса троса, то на этапе 1107 красным цветом зажигается центральный индикатор (в зависимости от варианта осуществления настоящего изобретения, один или несколько концевых переключателей могут быть задействованы для запрета движения в направлении, в котором увеличивается боковой перекос). Затем процесс переходит на этап 1108 для проверки того, не отключена ли функция помощника коррекции бокового перекоса троса. Горящий красным цветом центральный индикатор указывает оператору, что имеется недопустимый, чрезмерный боковой перекос, вследствие чего подъем груза невозможен и не должен производиться, и что кран следует перемещать в направлении, которое указывает горящий красным цветом боковой индикатор.
Таким образом, если перекоса троса нет, то центральный индикатор горит зеленым цветом и указывает на то, что можно безопасно поднимать груз без недопустимого, излишнего перекоса. В любом ином случае, используют другие четыре индикатора, которые позволяют оператору обнаружить присутствие перекоса в одном или нескольких направлениях и обеспечивают оператору инструкции для управления краном по направлениям. Если центральный индикатор светится красным цветом, это указывает оператору на то, что подъем груза невозможен, функция подъема отменена управляющим модулем и оператор может только перемещать кран в направлениях, которые обеспечат выравнивание тросов (в направлениях, которые указывают четыре индикатора).
В вышеприведенном примере, перекос в направлении движения моста обозначен в таблице символами, которые отмечены буквами L1 и L2, а перекос в направлении движения тележки обозначен в таблице символами, которые отмечены буквами L3 и L4. Следует понимать, что могут быть использованы другие способы представления информации о перекосе. Например, перекос троса в направлениях тележки и моста может быть показан на дисплее посредством кружка (текущий угол) и креста (искомый угол). Если кружок и крест перекрывают друг от друга, то перекос троса находится в диапазоне допустимых значений.
Следует понимать, что могут быть использованы и другие цвета, кроме красного и зеленого, и/или вместо различных цветов можно использовать различные символы, или различные звуки и вибрации, или для тех же целей может быть использована комбинация перечисленных сигналов.
Преимущество, обеспечиваемое указанной функцией помощника коррекции бокового перекоса троса, состоит в том, что она облегчает работу оператора и помогает избежать опасных ситуаций. Кроме того, оператор, зная надлежащее направление для выравнивания троса, экономит время, и может работать более эффективно, причем оператору легче управлять краном дистанционно, даже, например, без системы наблюдения на основе видеокамер.
Обнаружение столкновения и зацепления груза
Функция обнаружения столкновения и зацепления груза представляет собой функцию, которая минимизирует риск повреждений, вызванных нежелательными инцидентами, такими как столкновения или зацепления крюка, устройства захвата или груза.
В примере, представленном на фиг. 12, предполагается, что перемещение груза начинают с натяжения тросов и далее перемещения моста и/или тележки, при этом одно состояние контролируют во время фазы пуска, а четыре состояния - после завершения фазы пуска. Согласно другим вариантам осуществления настоящего изобретения можно использовать только одно, два, три или четыре из контролируемых состояний. Следует понимать, что приведенные ниже расчеты и сравнения выполнены отдельно для направления движения тележки и направления движения моста, при этом расчет значений переменных и контроль осуществляют все время в фоновом режиме.
Согласно фиг. 12, когда на этапе 1201 обнаружено, что кран начинает двигаться, на этапе 1202 включают функцию (с-и-з) обнаружения столкновения и зацепления груза. Затем, на этапе 1203 получают следующие параметры: длину L троса, коэффициент α, два пороговых уровня (th1 и th2) и постоянную β. Длину троса можно измерить или получить из запоминающего устройства, в котором хранится информация о длине троса. Вместо длины троса может быть использовано значение длины, соответствующее ситуации, при которой груз все время находился бы на уровне пола. Кроме того, используемое значение длины может представлять собой типичную длину троса во время перемещения крана. Коэффициент α, пороговые уровни и постоянную β получают из запоминающего устройства, в которое значения указанных параметров вводят заранее. Коэффициент α может быть в диапазоне от 0 до 1 включительно (то есть 0<α≤1). Значение коэффициента α определяют экспериментально, причем оно зависит от времени разгона крана и периода колебаний. Если разгон от нулевой скорости до постоянной скорости v (то есть скорости, используемой для приведения в движение крана/тележки/моста) длится более чем четверть периода колебаний, то значение коэффициента, не превышающее единицу, позволяет быстрее обнаруживать столкновение. Пороговый уровень th1 представляет собой максимально допустимое значение скорректированного угла при любых обстоятельствах, причем указанный пороговый уровень также определяют экспериментально. Пороговый уровень th1 может равняться, к примеру, 5°. Пороговый уровень th2 служит для обнаружения пиков (внезапных высоких значений, изменений импульсного типа) углового ускорения. Постоянная β может быть определена экспериментально, причем указанная постоянная предпочтительно находится в диапазоне от 0 до 1 включительно (то есть 0<β≤1).
Далее, на этапе 1204 вычисляют период Τ колебаний и время te окончания фазы пуска по формуле (3) для периода колебаний и по формуле (4) для времени te окончания:


где
Τ - период колебаний,
te - время окончания фазы пуска,
β - постоянная, значение которой получают на этапе 1203,
L - используемая длина троса, и
g - ускорение свободного падения.
Затем, на этапе 1205 ожидают пока время, прошедшее после того, как кран начал двигаться, не станет равным времени окончания фазы пуска. В это время, на этапе 1206 вычисляют предельное значение Предел 1 и абсолютное значение расчетной угловой скорости u)paC(k) раскачивания. Значение Предел1 может быть рассчитано по формуле (5):
Предел

где
t - время, прошедшее с момента начала движения крана,
v - скорость тележки или моста, полученная от датчика, контролирующего скорость, например, от частотного преобразователя крана, и
L - используемая длина троса.
Абсолютное значение расчетной угловой скорости ωpac(k) раскачивания можно вычислить посредством устройства наблюдения за раскачиванием с фиг. 2В и 2Е или по следующей формуле (6):

где
ωрас - абсолютное значение расчетной угловой скорости раскачивания для замера номер k,
k - номер замера (идентификатор замера) в момент времени t,
θpac(k) - значение расчетного угла для замера номер k, основанное на скорректированной информации по углу, как это было описано выше, например, со ссылкой на фиг. 2D,
h - интервал времени между замерами k-1 и k.
Затем, на этапе 1207 проверяют, меньше ли абсолютное значение расчетной угловой скорости раскачивания значения Предел1. Если нет, то на этапе 1208 регистрируют зацепление груза или столкновение, при этом в проиллюстрированном примере на этапе 1221 кран останавливают, причем после остановки крана (проверка остановки на этапе 1219), на этапе 1220 отключают функцию обнаружения столкновения и зацепления груза. Однако, в зависимости от варианта осуществления настоящего изобретения, факт обнаружения столкновения или зацепления может запускать аварийное предупреждение и/или вызывать автоматическую остановку крана, чтобы предотвратить дальнейшие повреждения. Когда кран останавливается, функция обнаружения столкновения и зацепления отключается, однако, если включено аварийное предупреждение, функция обнаружения столкновения и зацепления может оставаться активной.
Если абсолютное значение расчетной угловой скорости раскачивания меньше значения Предел 1, то процесс переходит на этап 1209 для вычисления абсолютного значения расчетной угловой скорости ωрас(k) раскачивания по формуле (6) и абсолютного значения углового ускорения γрас по формуле (7):

где
γpac - абсолютное значение расчетного углового ускорения для замера номер k,
k - номер замера (идентификатор замера),
ωpac(k) - расчетная угловая скорость раскачивания для замера номер k, рассчитанная по формуле (6), а
h - интервал времени между замерами k-1 и k.
Затем, на этапе 1210 проверяют, движется ли кран с постоянной скоростью. Если скорость постоянная, то на этапе 1211 вычисляют значение Предел 2 по формуле (8):
Предел

где
α - коэффициент, значение которого получают на этапе 1203,
v - скорость крана (то есть скорость тележки или моста), полученная от датчика, контролирующего скорость, например, от частотного преобразователя крана, а
L - используемая длина троса.
Затем, на этапе 1212 сравнивают абсолютное значение расчетной угловой скорости раскачивания со значением Предел 2. Если расчетная угловая скорость раскачивания не превышает значение Предел 2, то на этапе 1208 регистрируют зацепление груза или столкновение.
Если расчетная угловая скорость раскачивания меньше значения Предел 2, то на этапе 1213 сравнивают скорректированную информацию по углу θкор отклонения троса с пороговым уровнем th1. Если пороговый уровень th1 превышен, то на этапе 1208 регистрируют зацепление груза или столкновение, при этом в рассматриваемом примере процесс переходит на этап 1221 для остановки крана.
В ином случае процесс переходит на этап 1214 для проверки того, не превышает ли абсолютное значение расчетного углового ускорения пороговый уровень th2. Если пороговый уровень th2 превышен, то на этапе 1215 проверяют, близки ли два следующих абсолютных значения расчетного углового ускорения к нулю. Если они близки к нулю, то на этапе 1208 регистрируют зацепление груза или столкновение. Таким образом, в данном примере, посредством этапов 1214 и 1215 устанавливают предварительно заданное правило для расчетного углового ускорения.
Если на этапе 1210 обнаружено, что кран не движется с постоянной скоростью, то на этапе 1216 вычисляют значение Предел 3 по формуле (9):
Предел

где
α - коэффициент, значение которого получают на этапе 1203,
v(t) - скорость крана (то есть скорость тележки или моста) в момент t, полученная от датчика, контролирующего скорость, например, от частотного преобразователя крана, а
L - используемая длина троса.
Затем, на этапе 1217 сравнивают абсолютное значение расчетной угловой скорости раскачивания со значением Предел 3. Если расчетная угловая скорость не меньше значения Предел 3, то на этапе 1218 проверяют, остается ли расчетная угловая скорость раскачивания большей или равной значению Предел 3 в течение периода tp времени, превышающего четверть периода Τ колебаний. Если скорость остается большей значения Предел 3 в течение указанного периода времени, то на этапе 1208 регистрируют зацепление груза или столкновение. В ином случае процесс переходит на этап 1213 для сравнения скорректированной информации по углу θкор отклонения троса с пороговым уровнем th1.
Если на этапе 1217 обнаружено, что расчетная угловая скорость раскачивания меньше значения Предел 3, то процесс переходит на этап 1213 для сравнения скорректированной информации по углу θкор отклонения троса с пороговым уровнем th1.
Этапы 1209-1218 повторяют до тех пор, пока на этапе 1219 кран не остановится, а функция обнаружения столкновения и зацепления не будет отключена на этапе 1220, при этом процесс перейдет на этап 1201 для проверки, произведен ли снова пуск крана.
В другом варианте осуществления настоящего изобретения, с соответствующим пороговым уровнем на этапе 1213 вместо скорректированной информации по углу θкор отклонения троса используют расчетный угол θрас раскачивания.
Благодаря обнаружению столкновений и зацеплений в максимально возможные сроки вышерассмотренными средствами, удается предотвратить дальнейшие повреждения среды, в которой работает кран, и самого крана. Преимущество обеспечивается даже в том случае, если вместо измеренной длины троса используют фиксированное значение длины троса - время реакции может быть более продолжительным, но кран, в конце концов, остановится в силу выполнения этапа 1208. Функция обнаружения столкновения и зацепления груза также предотвращает или минимизирует повреждения в случае неожиданных перемещений (например, таких, которые вызваны заклиниванием кнопок управления или электрическими отказами). Данная функция особенно полезна в случаях применения полностью автоматического или полуавтоматического крана, поскольку данная функция обеспечивает остановку крана, если груз достаточно точно не следует за движением крана. Без данной функции, в случаях применения автоматического или полуавтоматического крана, кран может продолжать двигаться, или по меньшей мере пытаться продолжать двигаться, даже если происходит столкновение или какое-либо зацепление груза, что увеличивает риск повреждений.
Трехмерное позиционирование крюка
Точное позиционирование крюка относительно тележки и моста возможно благодаря информации по расчетному углу отклонения троса, полученной на основании информации по углу отклонения троса от инклинометра, когда длина троса известна. Однако, вместо известной длины можно использовать расчетную длину троса. Расчетной длиной троса может являться типичная высота, используемая для поднятия грузов, например, средняя высота крюка и груза относительно уровня земли (пола), над которым выполняют подъем груза. Согласно еще одному варианту осуществления настоящего изобретения, расчетной длиной троса может быть длина, которая на один метр меньше высоты тележки. Кроме того, расчетная длина троса может зависеть от габаритов груза, подлежащего подъему. В примере, представленном на фиг. 13, использован тот факт, что расчетная длина троса является достаточно точной величиной для последующих критериев управления краном. Следует понимать, что, если оператор располагает точной информацией о длине троса, то предпочтительно использовать эту информацию вместо расчетной длины троса.
Согласно фиг. 13, если на этапе 1301 обнаружено, что кран начал движение, то на этапе 1302 включают функцию трехмерного позиционирования крюка, при этом на этапе 1303 получают расчетную длину троса и другую относящуюся к процессу информацию. Указанная другая информация зависит от варианта осуществления настоящего изобретения и/или от задачи, для решения которой включают функцию трехмерного позиционирования. К примерам другой, относящейся к процессу информации относится информация о защищенных зонах, о зонах безопасности и характеристики обнаружения раскачивания. Термин «защищенная зона» в данном случае означает зону, в которую крюку и грузу входить запрещено. Зона безопасности определяет область, где крюк находится вблизи защищенной зоны или в защищенной зоне. Защищенные зоны могут быть заданы в виде двухмерных зон, имеющих незаданную высоту, или в виде трехмерных зон, имеющих заданную высоту. Таким образом, двухмерную зону пересекать нельзя, а прохождение через трехмерную зону возможно, если высота груза от земли больше заданной высоты. Например, если предусмотрена горизонтальная балка в виде выступающего элемента, то в трехмерной зоне ничто не может быть перемещено под балкой и на уровне высоты самой балки. В двухмерной зоне ничто не может быть перемещено также и над балкой. Следует понимать, что функция трехмерного позиционирования может быть включена отдельно, например, в ответ на то, что груз или крюк заходит в зону безопасности, заданную для защищенной зоны, или отключена в ответ на то, что груз или крюк покидают зону безопасности, и/или в ответ на конкретную инструкцию, полученную от оператора.
В представленном примере, управляющий модуль, дополнительно к инклинометру, соединен с датчиками и другими средствами, измеряющими положение моста и положение тележки. Таким образом, на этапе 1304 принимают информацию о положении моста и тележки, а также расчетный угол отклонения троса (обработанная информация по углу, принятая от инклинометра), причем на этапе 1305, на основе информации, полученной на этапе 1304, и расчетной длины троса, вычисляют пространственное положение крюка. В рассматриваемом примере положение крюка определяют относительно тележки и моста, поскольку в данном примере зоны безопасности заданы относительно координат тележки и моста, и возможно - относительно расчетной длины троса.
Затем, в проиллюстрированном примере, на этапе 1306 проверяют, находится ли крюк вблизи защищенной зоны/объема. В рассматриваемом примере, вокруг защищенной зоны/объема задана зона безопасности, определяющая «ближнюю область». Если крюк находится в зоне безопасности, то он приближается к защищенной зоне/объему, в результате чего на этапе 1307 вычисляют расстояние от крюка до защищенной зоны и дистанцию торможения (дистанцию замедления), которая требуется крану для остановки. Указанное расстояние и дистанцию торможения можно вычислить с использованием скорости крана (в направлениях движения тележки и моста), параметра замедления, значения расчетного угла троса, расчетной угловой скорости раскачивания, положения крана и характеристик защищенной зоны/объема. Затем, на этапе 1308 сравнивают указанное расстояние с дистанцией торможения. Если указанное расстояние меньше или равно дистанции торможения, то начинают торможение крана, или если торможение уже началось, то его продолжают на этапе 1309. Другим словами, на этапе 1309 кран замедляется.
Затем на этапе 1310 проверяют, остановился ли кран. Если кран остановился, то на этапе 1311 отключают функцию трехмерного позиционирования, а процесс переходит к этапу 1301 для проверки, началось ли движение крана.
Если на этапе 1310 обнаружено, что кран движется, то процесс переходит на этап 1304 для приема текущей информации о положениях и угле.
Если на этапе 1306 обнаружено, что крюк не находится в зоне безопасности, то процесс переходит на этап 1310 для проверки, остановлен ли кран. Кран может быть остановлен, например, в ответ на нажатие оператором кнопки стоп.
В другом варианте осуществления настоящего изобретения применяют функцию обнаружения раскачивания, которая определяет, раскачивается ли крюк. Например, функция обнаружения раскачивания может быть использована в ответ на обнаружение крюка в зоне безопасности (этап 1306) и/или в ответ на обнаружение того, что дистанция торможения меньше расстояния крюка от защищенной зоны (этап 1308). Самый простой способ определения того, раскачивается ли крюк, заключается в определении амплитуды качания по минимальному значению расчетного угла и максимальному значению расчетного угла среди расчетных значений, полученных, например, за последние пять секунд. Если амплитуда качания значительна, то раскачивание может быть принято в расчет при вычислении дистанции торможения, поскольку для остановки качающегося груза может потребоваться больше пространства, чем не качающегося.
Достаточно точное трехмерное позиционирование крюка позволяет внедрить много полезных функций, например вышеописанную функцию обнаружения раскачивания, а также использование защищенных зон без сложной логики управления и измерений. Полученное таким образом пространственное положение обеспечивает дополнительную информацию о внешних силах, влияющих на раскачивание груза, например, силах, вызванных ветром, о раскачивании, вызванном перекосом строп при подъеме и столкновениями. Такое непредвиденное раскачивание не представляет опасности для защищенных зон, поскольку инклинометр ведет наблюдение за качанием. Благодаря такому варианту осуществления настоящего изобретения, использование защищенных зон может обеспечивать еще большую безопасность, поскольку при всех обстоятельствах известно истинное местонахождение крюка. Если по какой-либо причине происходит раскачивание груза, это может быть обнаружено, и кран может быть остановлен достаточно рано, чтобы качающийся крюк не мог зайти в защищенную зону.
Управление с защитой от раскачивания
Функция управления с защитой от раскачивания представляет собой функцию управления, направленную на ослабление раскачивания. Ослабление раскачивания является вопросом безопасности, причем указанная функция обеспечивает более надежное выполнение разгрузочно-погрузочных работ, способствуя быстрому и точному позиционированию груза. Раскачивание груза происходит всегда по причине движения крана и помех, например ветра, вследствие чего возникает необходимость в наличии функции управления с защитой от раскачивания. В отличие от управления с защитой от раскачивания в системе с разомкнутым контуром, управление с защитой от раскачивания в системе с замкнутым контуром, обеспечиваемое схемой, например, проиллюстрированной на фиг. 2D и 2Е, учитывает отклонения угла троса, вызванные воздействием внешних сил, например порыва ветра, а также начальное раскачивание после подъема груза с боковым перекосом троса, и раскачивание после столкновения. Особенно это касается береговых кранов, для которых ветер представляет большую проблему, поскольку площадь боковой поверхности груза весьма велика, а в портах почти всегда дует ветер.
На фиг. 14 представлена блок-схема, иллюстрирующая различие между применением и неприменением функции управления с защитой от раскачивания при управлении электродвигателем и тормозом крана.
Согласно фиг. 14, когда оператор начинает перемещать кран, то есть, когда на этапе 1401 обнаружено, что оператор дает команду на перемещение тележки и/или моста, то на этапе 1402 проверяют, включил ли оператор функцию управления с защитой от раскачивания. Существует несколько способов обнаружить это. Например, если величина усиления в пропорциональном регуляторе (модуль 32 на фиг. 2D) установлена на 0, это означает, что функцию управления с защитой от раскачивания не используют, а если указанная величина установлена на другое значение, то функцию управления с защитой от раскачивания используют. Другой пример состоит в том, что поскольку включение функции управления с защитой от раскачивания выполняет оператор с пульта радиоуправления, то указанный пульт может передавать в управляющий модуль информацию о статусе, при этом указанную информацию обрабатывают посредством устройства обработки команд (модуль 35 на фиг. 2Е). Если на этапе 1402 обнаружено, что функцию управления с защитой от раскачивания используют, то на этапе 1403 управление электродвигателем осуществляют с компенсацией раскачивания. Компенсация раскачивания может быть обеспечена посредством скорректированного сигнала контрольной скорости (vкон,кор на фиг. 2D) с ограничением по скорости, который, помимо коэффициента усиления, зависит от расчетного угла θрас раскачивания, вычисленного устройством наблюдения за раскачиванием по формулам (1) и (2) на основании информации по углу отклонения троса, как это было рассмотрено выше при описании фиг. 2D. Другой способ обеспечения компенсации раскачивания заключается в использовании устройства обработки команд, изображенного на фиг. 2Е, так, чтобы оно использовало сигнал расчетного угла θрас раскачивания в качестве входного сигнала для формирования модифицированных команд управления. Модифицированные команды управления содержат значения для S1, S2 и АС, причем указанные значения приведены в следующей таблице. Предельные значения θW1, θW2 и ωL определяют экспериментально, причем первые два предельных значения предпочтительно, хотя и не обязательно, те же самые, что и значения, которые применяли, когда использовалась скорректированная информация по углу, и о которых шла речь выше при рассмотрении функции ручного сопровождения груза. Кроме того, одно или несколько из предельных значений может представлять собой переменную величину. К примеру, в процессе остановки, то есть, когда S1=0, S2=0, предельные значения θW1, θW2 можно плавно уменьшать в зависимости от времени для минимизирования раскачивания после остановки. Угловая скорость ωрас представляет собой производную по времени от расчетного угла θрас раскачивания. Другими словами, она может быть получена по формуле (2), если задано, что k2 равен 0. Как можно видеть из таблицы, информацию по расчетному углу раскачивания используют в качестве входных сигналов для реализации функции управления с защитой от раскачивания.

Если на этапе 1403 осуществляют управление электродвигателем с компенсацией раскачивания, то на этапе 1404 проверяют, включил ли оператор функцию управления с защитой от раскачивания, а на этапе 1405 проверяют, достигла ли нуля контрольная скорость, поступающая от оператора. Когда используют схему, приведенную на фиг. 2D, контрольная скорость от оператора представляет собой сигнал с выхода ограничителя 33′ скорости указанной схемы, и в описании фиг. 14 используется именно эта контрольная скорость от оператора.
Если на этапе 1405 обнаружено, что контрольная скорость от оператора достигла нуля, то в течение предварительно заданного времени ожидают, пока выполняется проверка того, выдал ли оператор новую контрольную скорость, то есть новую команду управления. Другими словами, на этапе 1406 проверяют, истекло ли указанное предварительно заданное время. Если время не истекло, то на этапе 1407 проверяют, получена ли новая команда управления. Если новая команда управления получена, то процесс переходит на этап 1403 для управления электродвигателем с компенсацией раскачивания. Если на этапе 1407 обнаружено, что новая команда не был получена, то процесс переходит на этап 1406 для проверки того, истекло ли предварительно заданное время. Если на этапе 1406 обнаружено, что предварительно заданное время истекло и не было принято никакой команды управления, то на этапе 1411 управление электродвигателем прекращают и закрывают механический тормоз. Затем осуществляют остановку крана. Вышеуказанное предварительно заданное время можно задавать произвольно. Например, оно может составлять 5 с. Задержка закрывания тормоза, вызванная ожиданием в течение предварительно заданного времени, служит для ослабления раскачивания во время остановки. После того, как кран остановится, раскачивание нельзя будет ослабить, поскольку функция управления с защитой от раскачивания и, соответственно, ослабления раскачивания основана на движении крана. Затем, на этапе 1401 снова проверяют, выдал ли оператор команду на перемещение.
Если на этапе 1402 обнаружено, что функция управления с защитой от раскачивания не включена, или на этапе 1404 обнаружено, что данная функция отключена во время движения крана, то управление двигателем осуществляют без компенсации раскачивания, то есть с использованием сигнала контрольной скорости от оператора без коррекции. В схеме с фиг. 2D устройство наблюдения за раскачиванием отключено путем установки коэффициента усиления пропорционального регулятора на нуль, в результате чего коррекция контрольной скорости будет нулевой.
Если на этапе 1408 осуществляют управление электродвигателем без компенсации раскачивания, то на этапе 1409 проверяют, включил ли оператор функцию управления с защитой от раскачивания, а на этапе 1410 проверяют, достигла ли нуля контрольная скорость, заданная оператором.
Если на этапе 1410 обнаружено, что контрольная скорость от оператора достигла нуля, то на этапе 1411 управление электродвигателем прекращают и закрывают механический тормоз без какой-либо задержки. Затем снова, на этапе 1401 проверят, выдал ли оператор команду на движение.
Если на этапе 1409 обнаружено, что функция управления с защитой от раскачивания включена, то процесс переходит на этап 1403 для осуществления управления электродвигателем с компенсацией раскачивания. Поскольку устройство наблюдения за раскачиванием вычисляет расчетный угол раскачивания и в случае, когда функцию управления с защитой от раскачивания не используют, несмотря на то, что расчетный угол раскачивания игнорируется (поскольку коэффициент усиления в пропорциональном регуляторе в схеме с фиг. 2D равен нулю, а расчетный угол раскачивания не используют для управления в схеме с фиг. 2Е), функция управления с защитой от раскачивания при ее включении незамедлительно получает надлежащие для использования значения в то время, как кран движется. В некоторых вариантах осуществления настоящего изобретения, в которых устройство наблюдения за раскачиванием выполнено с возможностью вычисления угла раскачивания только в случае, когда функцию управления с защитой от раскачивания используют, оператору придется ожидать в течение предварительно заданного времени после включения функции, прежде чем вступит в работу функция управления с защитой от раскачивания. При этом указанное предварительно заданное время необходимо устройству наблюдения за раскачиванием для получения надлежащего расчетного угла раскачивания. Указанное предварительно заданное время может быть выбрано произвольно. К примеру, оно может составлять 0,5 с или 1 с.
Согласно другому варианту осуществления настоящего изобретения, функцию управления с защитой от раскачивания невозможно отключить во время движения крана. В таком варианте этап 1404 пропускают. В еще одном варианте осуществления настоящего изобретения, функцию управления с защитой от раскачивания невозможно включить во время движения крана. В таком варианте пропускают этап 1409. Согласно еще одному варианту осуществления настоящего изобретения, функцию управления с защитой от раскачивания невозможно включить или отключить во время движения крана. В таком варианте пропускают этапы 1404 и 1409. В других вариантах включение/отключение функции управления с защитой от раскачивания также возможно после того, как сигнал управления от оператора достигнет нуля.
На фиг. 15А и 15В представлен еще один пример, иллюстрирующий различие между применением и неприменением функции управления с защитой от раскачивания, реализованной посредством схемы, изображенной на фиг. 2D или 2Е. На фиг. 15А проиллюстрированы экспериментальные результаты измерения угла раскачивания движущейся тележки, когда коэффициент b усиления контура управления с защитой от раскачивания составляет 4 м/с, расчетная длина троса равна 4 м, а фактическая длина троса равна 3,5 м. Номинальная скорость тележки составляет 20 м/мин. Другие параметры устройства наблюдения за раскачиванием составляют k1=0, k2=4 c-1, коэффициент усиления компенсации ускорения с=0,1 c2/м. На фиг. 15В представлен результат для того же самого крана, когда функцию управления с защитой от раскачивания не используют. Как можно видеть, функция управления с защитой от раскачивания позволяет эффективно ослабить раскачивание груза. На обеих фигурах фактический угол раскачивания обозначен непрерывной линией, а расчетный угол раскачивания обозначен пунктирной линией.
При вышеописанном управлении с защитой от раскачивания используют расчетное значение длины троса. На фиг. 15С представлен результат моделирования, где выполнено сравнение фактического угла раскачивания, когда фактическая длина троса составляет 1 м, с соответствующим расчетным углом раскачивания, полученным посредством вычислительного модуля, изображенного на фиг. 2D, при расчетной длине троса 10 м. На фиг. 15С фактический угол раскачивания обозначен непрерывной линией, а расчетный угол раскачивания обозначен пунктирной линией. Хотя имеются некоторые отличия, но они очень малы. Данный факт подтверждает идею, что нет необходимости знать точную длину троса; даже если расчетная длина троса содержит ошибку, раскачивание удается эффективно ослабить. То же самое относится и к вычислительному модулю, изображенному на фиг. 2Е.
Аналогичный способ с аналогичными модулями может быть использован с перемещаемым краном, управляемым напряжением/частотой. Однако, в случае крана, управляемого напряжением/частотой, вместо контрольной скорости используют контрольную частоту.
Пример крана
На фиг. 16 показана блок-схема, иллюстрирующая пример крана, содержащего некоторые из вышеописанных функций.
Согласно фиг. 16, на этапе 1600 обнаружено, что на устройстве управления краном нажата кнопка, относящаяся к движению. На этапе 1601 проверяют, связана ли указанная относящаяся к движению кнопка с функцией «ручного сопровождения груза». Если да, то на этапе 1602 проверяют, является ли груз слишком тяжелым. Другими словами, проверяют, будет ли натяжение тросов ниже порогового уровня, как описано выше в примере, раскрытом со ссылкой на фиг. 5. Если на этапе 1602 обнаружено, что груз не является слишком тяжелым, то на этапе 1603 включают функцию ручного сопровождения груза, которая остается активной в течение всего времени, пока проверка на этапе 1604 показывает, что кнопка нажата. Пока кнопка нажата, кран (на этапе 1605) перемещают в соответствии с движением крюка. Когда на этапе 1604 обнаружено, что кнопку отпустили, на этапе 1606 отключают функцию ручного сопровождения груза, а процесс переходит на этап 1600 для проверки того, нажата ли кнопка. Если груз оказывается слишком тяжелым, то в рассматриваемом примере по причинам безопасности на этапе 1616 кнопку, относящуюся к функции ручного сопровождения груза, игнорируют, а процесс переходит на этап 1600 для проверки того, нажата ли кнопка.
Если кнопка, относящаяся к движению, не отвечает за включение функции ручного сопровождения груза, значит, эта кнопка является кнопкой фактического управления движением, а на этапе 1607 проверяют, присоединен ли к крюку достаточно тяжелый груз. Это можно проверить путем определения того, превышает ли натяжение тросов пороговый уровень, как описано выше в примере, раскрытом со ссылкой на фиг. 5. Если груз достаточно тяжелый, то на этапе 1608 включают функцию уменьшения бокового перекоса троса. Функция уменьшения бокового перекоса троса на этапе 1609 обеспечивает установку тележки и моста или, если использован тандемный режим, то по меньшей мере тележки, таким образом, чтобы груз находился по существу под ними, игнорируя команды движения от оператора. Когда груз занимает положение, при котором возможно его поднятие, на этапе 1610 отключают функцию уменьшения бокового перекоса троса, а на этапе 1611 включают функцию управления с защитой от раскачивания, функцию трехмерного позиционирования крюка и функцию обнаружения столкновения и зацепления груза. В рассматриваемом примере для ясности предполагается, что на этапе 1612 груз безопасно перемещают в его новое искомое положение, при этом перемещение контролируют посредством включенных функций. Когда груз оказывается в новом искомом положении, на этапе 1613 его снимают с крюка, при этом натяжение тросов уменьшается. Далее, на этапе 1614 функции управления с защитой от раскачивания, трехмерного позиционирования крюка и обнаружения столкновения и зацепления груза отключают. Затем процесс переходит на этап 1600, для проверки того, нажата ли кнопка.
Если на этапе 1607 обнаружено, что груз отсутствует или что груз достаточно легкий, при этом, к примеру, боковой перекос тросов не вызовет повреждения крана, то на этапе 1615 кран перемещают все время, пока нажата кнопка. Затем процесс переходит на этап 1600 для проверки того, нажата ли кнопка.
Следует понимать, что в некоторых вариантах осуществления настоящего изобретения одна или несколько функций, включаемых на этапе 1611, могут быть активными всегда, когда кран движется.
Хотя на фиг. 16 это и не показано, следует понимать, что предусмотрены также и другие типы кнопок, например, кнопка для звукового сигнала (зуммера). Если такую кнопку нажимают, то совершается соответствующее действие.
Устройство для измерения длины троса
На фиг. 17А и 17В показано устройство, позволяющее довольно просто вычислить длину троса, причем указанную длину троса можно использовать во всех задачах, в которых такая информация необходима, например, в некоторых из вышеприведенных примеров. Устройство можно устанавливать на имеющиеся краны при их модернизации. Одно из преимуществ данного устройства состоит в том, что установка датчика может быть легко и быстро выполнена на имеющихся кранах.
На фиг. 17А изображена блок-схема части тележки. Устройство 1700 рядом с барабаном 104 содержит дополнительную управляющую штангу 1710, поверх которой подъемный трос 140 направленно перемещается посредством направляющего элемента 1730 при наматывании на барабан и сматывании с барабана. Кроме того, в нижней части тележки 120 установлен измерительный элемент 1720, например датчик с вытягивающимся тросиком.
На фиг. 17В представлена структурная схема, иллюстрирующая поперечное сечение В-В устройства 1700. Из фиг. 17В видно, что направляющий элемент 1730 соединен с измерительным элементом 1720 посредством тросика 1740, наподобие рыболовной лески. Конструкция измерительного элемента такова, что он стремится смотать тросик 1740 и измерить длину смотанного или размотанного тросика. Направляющий элемент 1730 установлен с возможностью движения в соответствии с движением подъемного троса 140 во время его намотки на барабан или размотки с барабана. При этом, когда весь подъемный трос, который прилегает к барабану, находится на барабане, направляющий элемент 1730 находится на стороне барабана противоположной той, с которой расположен измерительный элемент 1720, а когда подъемный трос 140 сматывают с барабана 104, направляющий элемент 1730 перемещается в направлении измерительного элемента 1720. Такое перемещение обеспечивает возможность сматывания тросика 1740 внутрь измерительного элемента и разматывания указанного тросика из измерительного элемента.
Поскольку, благодаря направляющему элементу 1730, подъемный трос наматывается на барабан так, что соседние витки троса плотно прилегают друг к другу, измерительный элемент, используя длину смотанной или размотанной части тросика 1740, может вычислять длину размотанной части подъемного троса и, соответственно, ту длину, которая необходима в расчетах. Другими словами, длина смотанного или размотанного участка тросика 1740 задает то место, где находится направляющий элемент 1730, а это, в свою очередь, задает, сколько витков подъемного троса было размотано. Поскольку каждый виток имеет одну и ту же длину, этой информации достаточно для определения длины подъемного троса. Согласно одному из вариантов осуществления настоящего изобретения, устройство 1700 может быть основано на использовании датчика с вытягивающимся тросиком. Другие способы измерения длины также могут быть использованы.
Этапы/пункты и относящиеся к ним функции, описанные выше со ссылкой на фиг. 4, 5, а также фиг. 9-14 и 16, указаны не в абсолютном хронологическом порядке. Некоторые из этапов можно выполнять одновременно или в порядке, отличающемся от предложенного. Некоторые из этапов или части этапов могут также быть исключены или заменены соответствующим этапом или частью этапа. Между этапами и внутри этапов можно также выполнять и другие функции. Например, вместо использования расчетной величины, можно измерять длину троса (то есть высоту).
Хотя в вышеприведенном описании функции рассматривались отдельно, в одном кране могут быть реализованы одна или несколько функций. В этом случае оператор может выбрать конкретную функцию, а управляющий модуль отвечает за ее выбор и функционирует соответствующим образом.
Хотя в вышеприведенном описании предполагается, что угол троса должен быть равен искомому углу, следует понимать, что может быть предусмотрен заданный допуск. Другими словами, если допуск составляет ±0,5°, а искомый угол 3°, то угол отклонения троса в 3,5° следует интерпретировать, как равный искомому углу.
Как видно из вышесказанного, каждый из различных вариантов осуществления настоящего изобретения обеспечивает недорогой, простой и надежный способ, требующий проведения незначительных работ по техническому обслуживанию и ремонту, а также никаких или незначительных изменений конструкции имеющихся тележек. Это позволяет, например, модернизировать кран так, чтобы кран содержал соответствующие функции и обеспечивал соответствующие преимущества. Модернизация может быть выполнена путем установки на кран соответствующего комплекта во время работ по техническому обслуживанию или капитального ремонта, как было описано выше.
Следует понимать, что на фиг. 2А-2Е представлены лишь примеры схем, которые можно использовать с рассмотренными выше функциями. Можно выбрать один или несколько модулей, показанных на фиг. 2А-2Е, и добавить в схему, представленную на другой фигуре, либо в качестве дополнительного модуля, либо в качестве замены одного или нескольких модулей, чтобы реализовать конкретную функцию, например, в зависимости от аппаратных компонентов крана, схемы системы управления и архитектуры. При выборе модулей для конкретного крана следует рассмотреть по меньшей мере следующие вопросы:
1) какой метод измерения является наилучшим для компенсации эффектов изменения скорости тележки и/или моста, чтобы получить скорректированную информацию по углу θкор отклонения троса,
2) какую переменную, θкор или θрас, нужно использовать в качестве информации по углу отклонения троса, то есть, имеется ли необходимость в применении устройства наблюдения за раскачиванием,
3) какой способ управления использовать, то есть можно ли использовать vкон (пропорциональный регулятор) непосредственно через аналоговый интерфейс привода или интерфейс шины привода, или же целесообразно реализовать управление через цифровой интерфейс привода (модифицированные команды управления),
4) поддержка каких функций необходима; например, нужно ли иметь только функцию управления с защитой от раскачивания или управляющий модуль должен также реализовать функцию обнаружения столкновений и зацепления груза.
Исходя из выбора указанных выше параметров, можно получить фактическую реализацию, основанную на многих вышеприведенных примерах.
Для специалистов в данной области должно быть очевидным, что по мере развития технологии, идею изобретения можно будет реализовать различными способами. Изобретение и варианты его осуществления не ограничены приведенными выше примерами и могут быть изменены в границах, которые установлены формулой изобретения.
Реферат
Изобретение относится к подъемным кранам, а именно к использованию результатов измерения угла отклонения троса для управления подъемным краном. В качестве информации обратной связи по углу принимают сигнал угла (θ) отклонения троса. Указанную информацию обратной связи по углу получают путем измерения посредством датчика, расположенного на тележке или рядом с тележкой. Указанную информацию обратной связи по углу корректируют путем компенсации ошибки, вызванной изменением скорости, и обрабатывают для выдачи инструкций по перемещению крана или другой управляющей информации, касающейся крана, на основе скорректированной информации по углу, в масштабе реального времени. Достигается измерение угла отклонения троса с учетом скорректированной информации обратной связи по углу отклонения троса даже при изменении скорости крана. 4 н. и 30 з.п. ф-лы, 27 ил., 3 табл.
Формула
принимают информацию обратной связи по углу отклонения подъемного троса крана, причем указанную информацию обратной связи по углу получают путем измерения с подъемного троса посредством датчика, расположенного на тележке или рядом с тележкой крана,
используя результаты, полученные через контур обратной связи и содержащие по меньшей мере предыдущую информацию обратной связи по углу, полученную путем измерения с подъемного троса посредством указанного датчика, корректируют принятую информацию обратной связи по углу путем компенсации ошибки, вызванной изменением скорости, и
обрабатывают скорректированную информацию обратной связи по углу для выдачи инструкций по перемещению крана или другой управляющей информации, касающейся крана.
используют скорректированную информацию обратной связи по углу для определения того, находится ли подлежащий подъему груз по существу по меньшей мере под тележкой, или для определения того, достаточно ли вертикально расположен трос,
перемещают по меньшей мере тележку на основании скорректированной информации обратной связи по углу в направлении, при котором тележка окажется по существу над грузом, или в направлении, при котором угол отклонения троса достигнет значения искомого угла, при котором трос расположен достаточно вертикально.
используют скорректированную информацию обратной связи по углу для определения того, находится ли подлежащий подъему груз по существу по меньшей мере под мостом, или для определения того, достаточно ли вертикально расположен трос,
перемещают по меньшей мере мост на основании скорректированной информации обратной связи по углу в направлении, при котором мост окажется по существу над грузом, или в направлении, при котором угол отклонения троса достигнет значения искомого угла, при котором трос расположен достаточно вертикально.
контролируют, сохраняется ли абсолютное значение расчетной угловой скорости раскачивания на уровне, превышающем предельное значение, в течение предварительно заданного периода времени, и
регистрируют столкновение или зацепление груза в ответ на то, что абсолютное значение расчетной угловой скорости раскачивания сохраняется на уровне, превышающем предельное значение, в течение предварительно заданного периода времени.
получают информацию о зоне, в которой перемещают кран, и оценивают длину троса,
используют полученную информацию по длине троса и информацию обратной связи по углу для определения расчетного пространственного положения груза или крюка,
сравнивают информацию по положению груза или крюка с информацией по зоне, и останавливают кран в ответ на обнаружение того, что указанное положение находится в защищенной зоне или вблизи защищенной зоны.
датчик угла наклона, предназначенный для установки на тележке или рядом с тележкой крана для измерения обратной связи по углу с подъемного троса, и
управляющий модуль, содержащий интерфейс для приема информации обратной связи по углу от датчика угла наклона, средства для корректировки принятой информации обратной связи по углу путем компенсации ошибки, вызванной изменением скорости, за счет использования результатов, полученных через контур обратной связи и содержащих по меньшей мере предыдущую информацию обратной связи по углу, полученную от указанного датчика угла наклона, средства для обработки скорректированной информации обратной связи по углу для выдачи инструкций по перемещению крана или другой управляющей информации, касающейся крана, и интерфейс для выдачи инструкций по перемещению крана или другой управляющей информации в механизм крана и в интерфейс оператора.
измерительный элемент, предназначенный для установки на тележке,
тросик, соединенный с измерительным элементом и предназначенный для соединения с направляющим элементом, который направляет трос во время его наматывания на барабан, причем указанный тросик выполнен с возможностью сматывания внутрь измерительного элемента и разматывания из измерительного элемента в зависимости от движения направляющего элемента, с которым тросик соединен, причем измерительный элемент выполнен с возможностью определения расстояния от крюка до барабана посредством указанного тросика.
фильтр нижних частот, соединенный с интерфейсом для получения информации обратной связи по углу и приема указанной информации обратной связи по углу в качестве входного сигнала,
усилитель, использующий в качестве входного сигнала информацию по контрольной скорости, скорость крана или величину ускорения крана,
вычитающее устройство, соединенное с фильтром нижних частот и усилителем для приема входных сигналов и выполненное с возможностью вычитания входного сигнала, полученного от усилителя, из сигнала, полученного от фильтра нижних частот, и выдачи скорректированной информации обратной связи по углу.
блок имитации зоны нечувствительности, соединенный с вычитающим устройством для приема входного сигнала от указанного вычитающего устройства,
усилитель, соединенный с указанным блоком имитации зоны нечувствительности для приема от него входного сигнала и для обеспечения первой контрольной скорости,
переключатель для выбора между первой контрольной скоростью и второй контрольной скоростью, причем вторая контрольная скорость представляет собой скорость, заданную оператором,
ограничитель скорости, соединенный с переключателем для получения входного сигнала,
контроллер, соединенный с ограничителем скорости для получения входного сигнала и с интерфейсом для обеспечения соответствующей управляющей информации для крана и для пользовательского интерфейса.
устройство наблюдения за раскачиванием, соединенное с вычитающим устройством для приема входного сигнала от указанного вычитающего устройства и выполненное с возможностью получения величины ускорения в качестве второго входного сигнала,
второй усилитель, соединенный с устройством наблюдения за раскачиванием для получения входного сигнала,
первый ограничитель скорости, соединенный со вторым усилителем для ограничения выходного сигнала второго усилителя,
второй ограничитель скорости для ограничения скорости, заданной оператором,
второе вычитающее устройство, соединенное с первым и вторым ограничителями скорости для вычитания выходного сигнала первого ограничителя скорости из выходного сигнала второго ограничителя скорости, и
контроллер, соединенный со вторым вычитающим устройством для приема первого входного сигнала и с интерфейсом для обеспечения соответствующей управляющей информации для крана и для пользовательского интерфейса.
устройство наблюдения за раскачиванием, соединенное с вычитающим устройством для приема входного сигнала от указанного вычитающего устройства и выполненное с возможностью получения величины ускорения в качестве второго входного сигнала,
устройство обработки команд, соединенное с устройством наблюдения за раскачиванием для приема от указанного устройства наблюдения сигнала расчетного угла раскачивания в качестве первого входного сигнала, с вычитающим устройством для приема от указанного вычитающего устройства скорректированной величины угла в качестве второго входного сигнала, а также с интерфейсом для получения через интерфейс сигнала контрольной скорости, сформированного из команды, заданной оператором, в качестве третьего входного сигнала, причем устройство обработки команд дополнительно соединено с устройством управления скоростью для подачи на указанное устройство управления скоростью управляющей информации в виде модифицированных команд управления.
фильтр нижних частот, соединенный с интерфейсом для приема информации обратной связи по углу в качестве входного сигнала,
вычитающее устройство, соединенное с фильтром нижних частот для приема входного сигнала и выполненное с возможностью вычитания входного сигнала, полученного от датчика искажения угла, из входного сигнала, полученного от фильтра нижних частот, и выдачи скорректированной информации обратной связи по углу,
усилитель, соединенный с интерфейсом для приема в качестве входного сигнала информации по искажению угла,
устройство наблюдения за раскачиванием, соединенное с вычитающим устройством для приема входного сигнала от указанного вычитающего устройства и с усилителем для приема в качестве второго входного сигнала величины ускорения, и
устройство обработки команд, соединенное с устройством наблюдения за раскачиванием для приема от указанного устройства наблюдения сигнала расчетного угла раскачивания в качестве первого входного сигнала, с вычитающим устройством для приема от указанного вычитающего устройства скорректированной величины угла в качестве второго входного сигнала, а также с интерфейсом для получения через интерфейс сигнала контрольной скорости, сформированного из команды, заданной оператором, в качестве третьего входного сигнала, причем устройство обработки команд дополнительно соединено с устройством управления скоростью для подачи на указанное устройство управления скоростью управляющей информации в виде модифицированных команд управления.
механизм крана,
подъемный трос и
комплект, содержащий:
датчик угла наклона, предназначенный для установки на тележке или рядом с тележкой крана и получения информации обратной связи по углу путем измерения с подъемного троса крана, и
управляющий модуль, содержащий интерфейс для приема информации обратной связи по углу от датчика угла наклона, средства для корректировки принятой информации обратной связи по углу путем компенсации ошибки, вызванной изменением скорости, за счет использования результатов, полученных через контур обратной связи и содержащих по меньшей мере предыдущую информацию обратной связи по углу, полученную от указанного датчика угла наклона, средства для обработки скорректированной информации обратной связи по углу для выдачи инструкций по перемещению крана или другой управляющей информации, касающейся крана, и интерфейс для выдачи инструкций по перемещению крана или другой управляющей информации в механизм крана и в интерфейс оператора.
управляющую штангу, поверх которой происходит наматывание троса,
направляющий элемент, обеспечивающий направленное движение троса поверх управляющей штанги,
измерительный элемент, установленный на тележке,
тросик, соединенный с направляющим элементом и измерительным элементом и выполненный с возможностью сматывания внутрь измерительного элемента и разматывания из измерительного элемента,
причем измерительный элемент выполнен с возможностью определения расстояния от крюка до барабана крана.
Комментарии