Оценка уклона дороги - RU2587745C2
Код документа: RU2587745C2
Чертежи



Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу оценки уклона α дороги согласно преамбуле п.1 формулы изобретения, компьютерной программе для реализации способа согласно преамбуле п.23 формулы изобретения и к системе для оценки уклона α дороги согласно преамбуле п.26 формулы изобретения.
Уровень техники
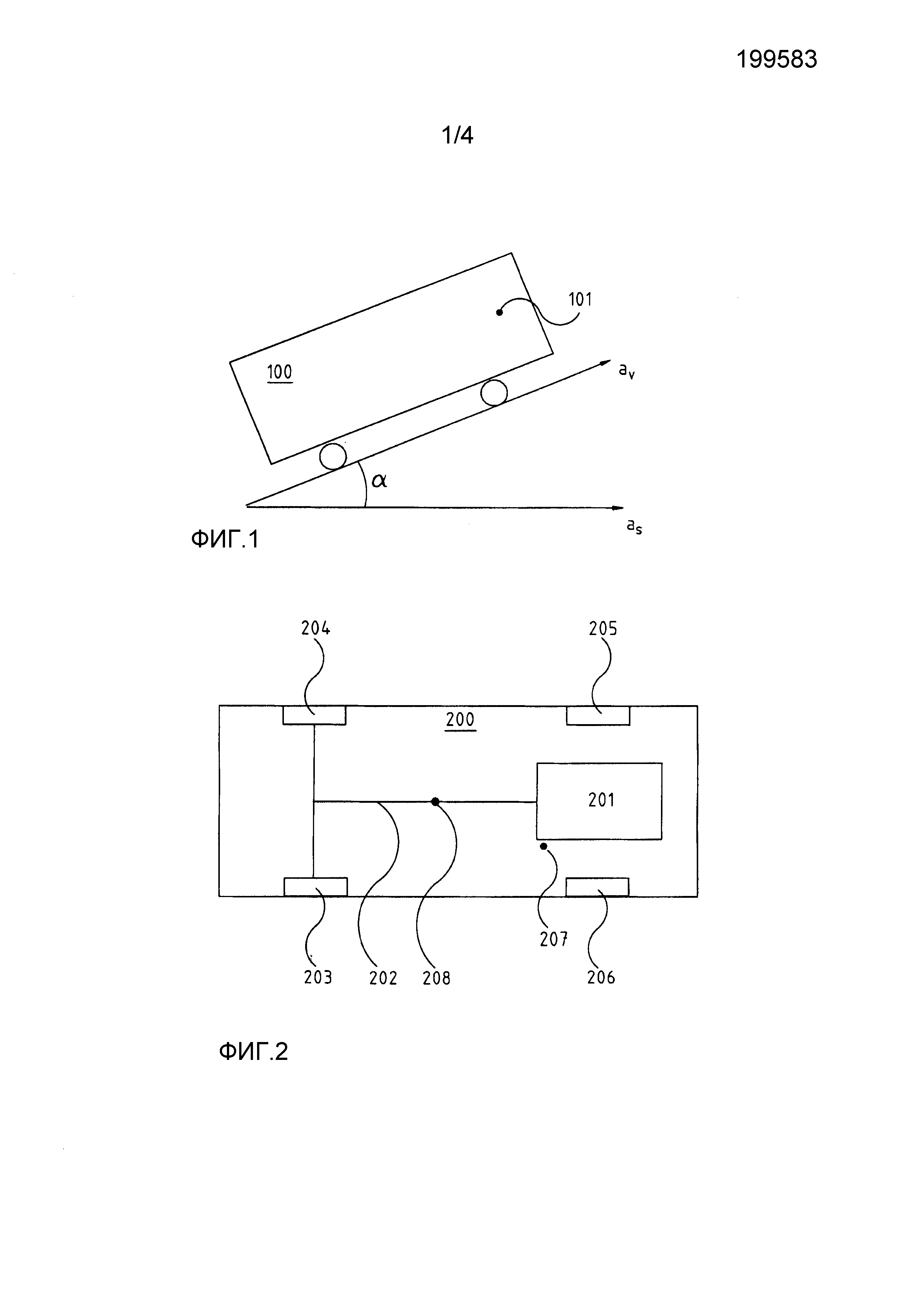
Дороги, например, национальные шоссе и автомагистрали, проходят по ландшафту с определенной топографией, что может давать в результате различный уклон α на каждом участке дороги. Иметь возможность вычислять этот уклон α и тем самым иметь доступ к соответствующему значению для него важно в различных прикладных задачах в автотранспортном средстве. Примером такой прикладной задачи является автоматический выбор передачи, т.е. применение в автоматически управляемой ручной коробке передач, где важно иметь возможность определять текущее сопротивление движению, и, следовательно, знать какую передачу выбирать в данный момент времени. Другим примером прикладной задачи является круиз-контроль, который принимает уклон α дороги во внимание при определении того, какой крутящий момент затребовать от двигателя транспортного средства. Уклон α дороги также может быть использован, например, в тормозных системах и других системах помощи водителю. Оценка уклона α дороги в настоящее время часто основана на акселерометре, который измеряет ускорение в направлении движения транспортного средства. Это иллюстрировано схематично на фиг.1, на которой автотранспортное средство 100 движется по участку дороги, который имеет уклон α. Транспортное средство имеет ускорение av, и акселерометр 101 в транспортном средстве измеряет ускорение as, которое является ускорением в горизонтальном направлении. Акселерометр измеряет и, таким образом, формирует сигнал, соответствующий

при этом g является ускорением вследствие гравитации.
Этот сигнал может затем быть использован для определения уклона α дороги. При небольших значениях α, sin(α) может быть аппроксимирован к α, что означает, что уклон α дороги может быть определен как

Ускорение av транспортного средства, таким образом, здесь вычитается из значения as, измеренного посредством акселерометра, для того, чтобы оставлять только гравитационный компонент измеренного ускорения.
Эта процедура для определения уклона α дороги работает хорошо на дорогах, где уклон α и изгиб являются незначительными. На, по существу, горизонтальных и прямых дорогах, например, автомагистралях, она формирует относительно хорошую оценку уклона α, но далека от оптимальной на дорогах и участках дорог, которые не являются, по существу, горизонтальными и прямыми.
Когда транспортное средство движется по дороге, которая имеет не только незначительные уклоны α и повороты, по такой как второстепенная дорога и некоторые национальные шоссе, акселерометр будет не только измерять ускорение, что важно для определения уклона α, а будет также измерять другие ускорения, которые присутствуют вследствие, среди прочего, изгиба дороги. Эти другие ускорения, которые, таким образом, также будут включены в сигнал as, сформированный акселерометром 101, будут в этом случае неблагоприятно влиять на достоверность оценки уклона α дороги.
Краткое описание изобретения
Целью настоящего изобретения является предоставление эффективного и надежного способа оценки уклона α дороги. Эта цель достигается посредством вышеупомянутого способа оценки уклона α дороги согласно характеризующей части п.1 формулы изобретения. Она также достигается посредством вышеупомянутой компьютерной программы согласно характеризующей части п.23 формулы. Она также достигается посредством вышеупомянутой системы оценки уклона α дороги согласно характеризующей части п.26 формулы изобретения.
Настоящее изобретение идентифицирует различные динамические процессы, которые воздействуют на транспортное средство, и их потенциал для корректной оценки уклона α дороги. Изобретение использует сочетание различных датчиков, чтобы совместно взвешивать различные способы для определения уклона α, которые подразумевают использование акселерометра или уравнения сил. На основе обнаружения возникновения динамических процессов изобретение регулирует это сочетание датчиков таким образом, что используются соответствующие преимущества способа с акселерометром и способа с уравнением сил, в то же время избегая их соответствующих недостатков.
Если, например, обнаруживается динамический процесс, сочетание датчиков регулируется так, что их чувствительность и входные сигналы оптимизируются для конкретного обнаруженного процесса. В оценке уклона α дороги, когда такие динамические процессы являются текущими, регулировка сочетания датчиков, которая может быть выполнена посредством фильтра Калмана, делает возможным пренебрежение компонентами ускорения, которые присутствуют вследствие динамического процесса, а не в следствие фактического уклона α. Это означает, что эффективная и достоверная оценка уклона α дороги всегда достижима с помощью изобретения.
Согласно варианту осуществления настоящего изобретения, взвешивание, по меньшей мере, двух входных сигналов выполняется посредством умножения, по меньшей мере, одного из них на значение для измеренного шума, относящегося к конкретному сигналу. Если, по меньшей мере, два входных сигнала используются в сочетании датчиков в данный момент времени, например, во время выборки, это может рассматриваться как совместное взвешивание входных сигналов в это время. Например, совместное взвешивание входных сигналов может тогда иметь место непрерывно при каждом вычислении, например, в каждый момент выборки.
Согласно другому варианту осуществления настоящего изобретения взвешивание, по меньшей мере, двух входных сигналов может быть выполнено таким образом, что только один из них принимается во внимание в данный момент времени. Различные отдельные входные сигналы будут, таким образом, приниматься во внимание в различные моменты времени, поскольку выбор входного сигнала будет зависеть от ситуации движения. При каждом отдельном вычислении, которое может принимать форму моментов времени выборки, используется только один входной сигнал, но со временем различные входные сигналы будут взвешиваться совместно посредством сочетания датчиков, поскольку различные входные сигналы выбираются в различные моменты времени. Совместное взвешивание во временном пространстве будет, таким образом, выполнено согласно варианту осуществления.
За счет регулировки по ситуации сочетания датчиков, можно увеличивать чувствительность сочетания датчиков в обычном случае, т.е., когда не протекают динамические процессы, тогда как его чувствительность может быть снижена, когда протекает динамический процесс. Результатом является более быстрая оценка уклона α и изменения изгиба дороги, что очень полезно, например, при вождении по пересеченной местности.
Аспект настоящего изобретения использует оценку уклона α дороги в выборе передачи в системе автоматического выбора передачи. Критичным для системы автоматического выбора передачи является доступ к текущему значению уклона α дороги, чтобы предоставлять ей возможность выбирать правильную передачу в конкретный момент времени. Быстрая оценка уклона α дороги, достигнутая настоящим изобретением, означает, что может быть выполнена более быстрая оценка сопротивления движению, что очень важно в оптимальном выборе передач.
Настоящее изобретение может, таким образом, управлять динамическими процессами, регулируя сочетание датчиков на их основе, так что уклон α дороги может также быть оценен на их основе. Это предоставляет существенные преимущества по сравнению с пренебрежением динамическими процессами, что повлекло бы за собой их фильтрование, приводя к более медленному обновлению или, возможно, приостановлению оценки. Само это привело бы к задержанной оценке уклона α и изменений в изгибе дороги, а также к некорректным передачам, выбранным посредством системы автоматического выбора передачи.
Краткий список чертежей
Изобретение объясняется более подробно ниже со ссылкой на присоединенные чертежи, на которых одинаковые обозначения ссылок используются для аналогичных элементов, и на которых
Фиг.1 изображает схематично транспортное средство в отношении уклона α дороги,
Фиг.2 изображает схематично транспортное средство, в виде сверху,
Фиг.3 - это блок-схема последовательности операций способа согласно изобретению,
Фиг.4 - это блок-схема последовательности операций для вариантов осуществления согласно изобретению, и
Фиг.5 изображает блок управления.
Описание предпочтительных вариантов осуществления
Как упомянуто выше, акселерометр может быть использован, чтобы формировать сигнал, который может быть использован в оценке уклона α дороги. Оценка уклона α на основе показаний, предоставленных акселерометром, может быть выполнена относительно быстро. Оценка на основе акселерометра также предоставляет достоверные значения для дорог, где уклон α и изгибы являются незначительными.
Однако, местоположение акселерометра в транспортном средстве является проблемой в том, что оно обычно не находится в центре поворота транспортного средства. Это иллюстрировано схематично на фиг.2, которая изображает транспортное средство 200 с двигателем 201, трансмиссией 202 и колесами 203, 204, 205, 206. Транспортное средство имеет центр 208 поворота, вокруг которого оно движется, когда оно поворачивает, местоположение которого зависит, среди прочего, от длины транспортного средства и местоположения и интервала между колесами 203, 204, 205, 206. Однако, акселерометр 207 обычно находится близко к или в окрестностях двигателя 201, в местоположении, которое обычно не совпадает с центром 208 поворота транспортного средства. Это означает, что ускорения, возникающие от поворота, также будут включены в сигнал as, сформированный акселерометром 207, если дорога изменяет направление относительно круто.
Уклон α дороги может также быть определен на основе уравнения сил, такого как

в котором f является силой, m - весом транспортного средства, и a - ускорением.
Левая часть уравнения сил может также быть выражена как

в котором fd является движущей силой, fr - силой качения вследствие сопротивления качению, и fa - силой воздуха вследствие сопротивления воздуха.
Уклон α дороги может быть определен на основе уравнений 3 и 4 сил. Определение уклона α дороги на основе этих уравнений дает в результате достоверные оценки для него, по существу, на всех типах дорог, не только, по существу, на горизонтальных и прямых дорогах, но также на дорогах с более значительными уклонами и изгибами. Модели для этих уравнений, из которых уклон α может быть получен, часто используются, когда эти уравнения сил используются для его определения, но эти модели дают в результате некую неопределенность относительно оцененного значения уклона α, что является недостатком его оценки на основе уравнений сил.
Таким образом, существуют, по меньшей мере, два способа для определения уклона α дороги, один из них основан на измерениях ускорения посредством акселерометра 207, другой, по меньшей мере, на одном уравнении сил. Оценка с помощью акселерометра является быстрой и достоверной на относительно прямых дорогах. Оценка с помощью уравнения сил является более медленной, чем оценка с помощью акселерометра, и непригодной, когда силовая передача прервана, т.е., когда крутящий момент двигателя не передается колесам 203, 204, 205, 206, например, когда активирована функция сцепления или применен один или более тормозов, но она достоверна на всех типах дорог.
Изобретатели настоящего изобретения идентифицировали эти преимущества и недостатки соответствующих способов оценки и предложили объединить эти способы, так что каждый используется до некоторой степени оптимальным образом. Настоящее изобретение, таким образом, объединяет преимущества оценки с помощью акселерометра с преимуществами оценки с помощью уравнения сил, в то же время избегая недостатков обоих.
Для этого, настоящее изобретение использует сочетание датчиков, которые могут совместно взвешивать, по меньшей мере, два значения/входных сигналов датчиков, сформированных одним или более датчиками/способами. Сочетание датчиков имеет здесь, по меньшей мере, два входных сигнала и, по меньшей мере, один весовой коэффициент. Если, по меньшей мере, один из этих, по меньшей мере, двух входных сигналов и/или, по меньшей мере, один весовой коэффициент определен или выбран согласно изобретению, как описано более подробно ниже, сочетание датчиков может быть использовано, чтобы объединять преимущества оценки с помощью акселерометра и оценки с помощью уравнения сил.
Настоящее изобретение подразумевает обнаружение того, протекает ли в настоящий момент, по меньшей мере, один динамический процесс. Динамический процесс может здесь содержать, например, по меньшей мере, один крутой поворот, одно существенное изменение в ускорении или одно существенное изменение в замедлении и может, например, быть обнаружено на основе торможения, скорости транспортного средства, радиуса изгиба или выбранной передачи, как описано более подробно ниже. В зависимости от результата обнаружения сочетание датчиков затем управляется посредством, по меньшей мере, одного, по меньшей мере, из двух входных сигналов для сочетания датчиков и/или, по меньшей мере, одного весового коэффициента сочетания датчиков, определяемого на основе того, воздействует или нет в настоящее время на транспортное средство динамический процесс.
По меньшей мере, два входных сигнала могут здесь быть взвешены в совместном взвешивании таким образом, например, что акселерометру дается большее влияние, если некоторый или первый динамический процесс является текущим или нет, или они могут быть взвешены таким образом, что уравнение сил имеет большее влияние, если некоторый второй динамический процесс является текущим. Взвешивание может проводиться посредством одного или более, по меньшей мере, из двух входных сигналов, взвешиваемых, чтобы изменять взаимное влияние входных сигналов на сочетание датчиков. Аналогично, одному или более другим весовым коэффициентам в сочетании датчиков могут быть даны различные значения в зависимости от того, является или нет некоторый динамический процесс текущим. Результатом является то, что совместное взвешивание входных сигналов имеет место при конкретном вычислении, которое может быть во время выборки. Взвешивание, по меньшей мере, двух входных сигналов сопровождается умножением, по меньшей мере, одного из них на значение, основанное на величине шума измерения, относящегося к этому, по меньшей мере, одному входному сигналу, как описано более подробно ниже.
Согласно изобретению сочетание датчиков, таким образом, регулируется на основе того, протекает или не протекает в настоящий момент динамический процесс, так что лучший способ в это время, или лучшая комбинация способов в это время, используется в оценке уклона α дороги. Это означает, что всегда может получаться достоверное значение для уклона α. Более того, это достоверное значение всегда получается с наименьшей возможной задержкой, что важно в различных прикладных задачах, например, когда выбор передачи основан на уклоне α дороги. Согласно варианту осуществления изобретения сочетание датчиков управляется посредством фильтра Калмана, для которого оценка уклона α дороги является единственным состоянием. В этом случае вышеупомянутый, по меньшей мере, один из двух входных сигналов, который определен на основе того, протекает или нет в настоящий момент динамический процесс, служит в качестве, по меньшей мере, одного входного сигнала для фильтра Калмана. Вышеупомянутый, по меньшей мере, один весовой коэффициент здесь принимает форму, по меньшей мере, одной ковариационной матрицы для шума модели этого фильтра Калмана.
Фильтр Калмана может быть описан математически как

в котором
- x представляет вектор состояния, который в этом случае является уклоном α дороги,
- y представляет входной сигнал для фильтра,
- A представляет модель системы, которая в этом случае определена как A=1 (описано более подробно ниже),
- L представляет усиление для фильтра,
- C представляет входную модель для фильтра,
- Q представляет ковариационную матрицу для шума модели,
- P представляет ковариационную матрицу для погрешности оценки, и
- R представляет ковариационную матрицу для шума измерения.
Согласно варианту осуществления настоящего изобретения фильтр Калмана использует прогноз, что уклон α дороги в следующем состоянии будет равен уклону в текущем состоянии, т.е. A=1.
Как может быть видно в уравнении 5, усиление L для фильтра зависит от P, C и R, а P сам зависит от ковариационной матрицы для шума Q модели. Как упомянуто выше, согласно варианту осуществления, ковариационная матрица для шума Q модели служит в качестве весового коэффициента для сочетания датчиков. Таким образом, это ковариационная матрица для шума Q модели, которая регулируется в фильтре Калмана в зависимости от того, протекает или нет динамический процесс.
Ковариационная матрица для шума Q модели использует входной сигнал, чтобы взвешивать значение, спрогнозированное посредством фильтра для следующего состояния, которое прогнозируется быть таким же, что и настоящее состояние, так что больше или меньше вес/влияние входного сигнала зависит от значения ковариационной матрицы для шума Q модели. Небольшое значение ковариационной матрицы для шума Q модели означает, что только небольшое изменение принимается фильтром, таким образом, фильтр может быть сделан более медленным, когда необходимо.
Модель C входного сигнала, выбранная для фильтра, основана преимущественно на акселерометре или преимущественно на уравнении сил, в зависимости от того, протекает или нет в настоящее время динамический процесс.
Когда согласно примеру настоящего изобретения фильтр Калмана имеет два входных сигнала, один из них на основе акселерометра, другой на основе уравнения сил, входная модель C становится вектором 2×1, содержащим эти два входных сигнала в качестве элементов в векторе, т.е., C=[1 g]. Если, в связи с этим, вектор модели C входного сигнала имеет, например, два элемента со значениями, отличными от нуля, сочетание датчиков будет проводить совместное взвешивание двух входных сигналов, которые соответствуют этим ненулевым элементам.
Ковариационная матрица R для шума измерения является тогда диагональной матрицей с ковариантностью для шума измерения в элементах диагонали. Если, например, ковариационная матрица R для шума измерения имеет два элемента со значениями, отличными от нуля, и вектор для входной модели C имеет два ненулевых элемента (как указано выше), два элемента в ковариационной матрице R для шума измерения дадут в результате взвешивание между двумя входными сигналами, которые соответствуют элементам модели C входного сигнала, когда эти два входных сигнала должны быть совместно взвешены в сочетании датчиков.
В целом, можно сказать, что взвешивание входных сигналов посредством ковариационной матрицы R для шума измерения зависит от величины фактического шума измерения для каждого входного сигнала. Если, например, входной сигнал акселерометра имеет значительный шум измерения, элемент в ковариационной матрице R для шума измерения, который соответствует элементу входного сигнала акселерометра в модели C входного сигнала, будет предполагать существенное значение, заставляя входные сигналы взвешиваться далеко от входного сигнала акселерометра по направлению к входному сигналу уравнения сил. Другими словами, два входных сигнала здесь взвешиваются так, что входному сигналу уравнения сил задается большее влияние над сочетанием датчиков, чем влияние входного сигнала акселерометра. Значения элементов ковариационной матрицы R для шума измерения могут изменяться в диапазоне 0,0001-150 и определять соответственно вес входных сигналов для сочетания датчиков.
Согласно варианту осуществления настоящего изобретения сочетание датчиков подразумевает совместное взвешивание используемой модели и сигналов измерения. Здесь модель оценивается относительно измеренных значений посредством сравнения спрогнозированных значений


Важная часть настоящего изобретения состоит в идентификации различных динамических процессов, для которых сочетание датчиков должно быть отрегулировано для того, чтобы иметь возможность быстро формировать достоверное значение для уклона α дороги.
Согласно варианту осуществления настоящего изобретения один или более крутых поворотов, выполненных транспортным средством, составляет такой динамический процесс. По меньшей мере, один поворот считается крутым, если он имеет радиус менее предварительно определенного значения. Такой поворот может, например, иметь радиус менее 25 метров. Поворот может также быть определен как крутой, если его прохождение занимает больше предварительно определенного времени и имеет предварительно определенный радиус. Поворот может, например, быть обнаружен как крутой, если его прохождение занимает больше двух секунд и имеет такой предварительно определенный радиус.
Согласно варианту осуществления настоящего изобретения, по меньшей мере, один из двух входных сигналов сочетания датчика, который может, как указано выше, быть вектором y входного сигнала в фильтре Калмана, взвешивается, так что входному сигналу, который основан на уравнении сил (уравнения 3 и 4), дается большое влияние в сочетании датчиков, если обнаружен, по меньшей мере, один крутой поворот. Тот факт, что входному сигналу на основе уравнения сил дается большое влияние посредством взвешивания, означает здесь, что сигнал уравнения сил после взвешивания имеет большее влияние, чем сигнал акселерометра. Таким образом, способ согласно этому варианту осуществления выбирает базирование оценки уклона α дороги больше на уравнении сил и меньше на акселерометре, когда происходит крутой поворот. Это означает, что избегаются проблемы, связанные с акселерометром, расположенным не в центре поворота транспортного средства. Таким образом, нерелевантные ускорения, измеренные акселерометром, когда оценивается уклон α дороги, игнорируются, давая в результате более точную оценку. Согласно варианту осуществления входной сигнал на основе уравнения сил здесь выбирается как единственный входной сигнал, например, посредством взвешивания входного сигнала на основе акселерометра таким образом, чтобы он был проигнорирован в сочетании датчиков, как описано ниже в отношении фиг.4.
Согласно варианту осуществления настоящего изобретения существенное изменение в ускорении составляет динамический процесс, для которого сочетание датчиков должно быть отрегулировано. Такое существенное изменение может, например, происходить при ускорении из неподвижного состояния или при ускорении во время изменения передачи. Такое существенное изменение в ускорении может влиять на взаимное соотношение между шасси транспортного средства и горизонтальной плоскостью. Оно может также влиять на взаимное соотношение между подвеской, например, подвеской колеса, транспортного средства и горизонтальной плоскостью. Другими словами, существенное изменение ускорения может заставлять шасси и/или подвеску подниматься относительно горизонтальной плоскости. Согласно варианту осуществления, изменение ускорения считается существенным, если оно составляет, по меньшей мере, порядка 1 м/с3.
Сочетание датчиков, таким образом, регулируется таким способом, что, по меньшей мере, один, по меньшей мере, из двух входных сигналов для сочетания датчиков, который может, следовательно, принимать форму вектора y входного сигнала для фильтра Калмана, взвешивается так, что входному сигналу на основе акселерометра 207 дается большое влияние в сочетании датчиков, и что, по меньшей мере, один весовой коэффициент устанавливается в значение, которое дает в результате чувствительность сочетания датчиков, сниженную относительно значения, которое имеет весовой коэффициент, когда динамический процесс не протекает в настоящий момент. Другими словами, значение для весового коэффициента здесь определяется таким образом, что сочетание датчиков становится более медленным, чем если бы не было существенного изменения ускорения. Тот факт, что сигналу акселерометра дается большое влияние, означает здесь, что он имеет большее влияние, чем входной сигнал уравнения сил. В случаях, когда сочетание датчиков принимает форму фильтра Калмана, и весовой коэффициент, поэтому, будет ковариационной матрицей для шума Q модели фильтра, элементы в этой ковариационной матрице для шума Q модели установлены в низкое значение, давая в результате более медленный фильтр с пониженной чувствительностью. Точное значение уклона α дороги, таким образом, получается быстро, поскольку в оценке может быть использован акселерометр. Согласно варианту осуществления входной сигнал на основе акселерометра здесь выбирается в качестве единственного входного сигнала, например, посредством взвешивания входного сигнала на основе уравнения сил таким образом, чтобы он был проигнорированным в сочетании датчиков, как описано ниже в отношении фиг.4.
Согласно другому варианту осуществления настоящего изобретения существенное изменение замедления составляет динамический процесс, для которого сочетание датчиков должно быть отрегулировано. Такое существенное изменение может, например, происходить во время замедления по случаю изменения передачи, во время замедления, которое возникает от частичного торможения, например, в то время как транспортное средство находится в движении, или во время полного торможения до неподвижного состояния. Согласно варианту осуществления, изменение замедления считается существенным, если оно равно, по меньшей мере, порядка 1 м/с3.
Согласно этому варианту осуществления, когда существенное изменение замедления обнаруживается в качестве динамического процесса, сочетание датчиков регулируется, так что, по меньшей мере, один, по меньшей мере, из двух входных сигналов для сочетания датчиков, который может быть представлен вектором y входного сигнала фильтра Калмана, взвешивается, так что входному сигналу на основе акселерометра 207 дается большее влияние в сочетании датчиков. По меньшей мере, один весовой коэффициент, который может принимать форму ковариационной матрицы для модели шума Q фильтра Калмана, также устанавливается в значение, которое дает в результате чувствительность сочетания датчиков, сниженную относительно значения, которое весовой коэффициент имеет, когда динамический процесс не происходит в настоящий момент, так что сочетание датчиков становится более медленным, чем оно было бы, если б не было существенного изменения ускорения/замедления. Тот факт, что сигналу акселерометра здесь дается большое влияние, означает, что он имеет большее влияние, чем сигнал уравнения сил. Таким образом, сочетание датчиков здесь регулируется способом, по существу, аналогичным случаю динамического процесса в форме существенного изменения ускорения. Когда акселерометру может быть дано большое влияние в оценке, точное значение уклона α дороги получается быстро. Согласно варианту осуществления входной сигнал на основе акселерометра здесь выбирается в качестве единственного входного сигнала, например, посредством входного сигнала на основе уравнения сил, взвешиваемого таким образом, чтобы он был проигнорированным в сочетании датчиков, как описано ниже в отношении фиг.4.
Образом, аналогичным существенному изменению ускорения, существенное изменение замедления может также влиять на взаимное соотношение между шасси или подвеской транспортного средства и горизонтальной плоскостью. Существенное изменение замедления может здесь заставлять шасси и/или подвеску опускаться относительно горизонтальной плоскости. Согласно другому варианту осуществления настоящего изобретения торможение во время поворота составляет динамический процесс. Согласно другому варианту осуществления запуск или отключение двигателя также составляют динамический процесс. Когда обнаруживается такое торможение во время поворота или такой запуск или отключение двигателя, сочетание датчиков регулируется так, что, по меньшей мере, один, по меньшей мере, из двух входных сигналов для сочетания датчиков, который может принимать форму вектора y входного сигнала для фильтра Калмана, определяется как соответствующий предыдущей оценке уклона α дороги. Другими словами, фильтр Калмана является здесь фиксированным, что может также считаться необновляемым фильтром. В уравнении 5, которое описывает фильтр Калмана, элементы в матрице для модели C входного сигнала, поэтому, установлены в значение 0 (ноль), т.е. C=[0 0]. Входной сигнал, таким образом, определяется здесь посредством элементов матрицы C модели входного сигнала, которым дано значение 0 (ноль), так что входной сигнал соответствует предыдущей оценке. Эту предыдущую оценку будет легко найти в памяти, в которой она сохранена.
Мы описали выше то, как сочетание датчиков должно быть отрегулировано для различных динамических процессов, когда они обнаруживаются. Согласно варианту осуществления, если, наоборот, обнаружение показывает, что в настоящее время динамические процессы не протекают, сочетание датчиков регулируется так, что, по меньшей мере, один, по меньшей мере, из двух входных сигналов взвешивается так, что сигналу на основе акселерометра задается большее влияние на сочетание датчиков, чем входному сигналу на основе уравнения сил. Как упомянуто выше, оценки уклона α дороги на основе большого влияния входного сигнала от акселерометра являются относительно быстрыми и дают в результате достоверные значения для дорог с большими радиусами изгиба. По меньшей мере, один весовой коэффициент также устанавливается в значение, которое дает в результате чувствительность сочетания датчиков, регулируемую до уровня шума акселерометра. Величина этого весового коэффициента, поэтому, определяется на основе конкретного используемого акселерометра, поскольку различные типы/марки акселерометров имеют различные уровни шума. Согласно варианту осуществления входной сигнал на основе акселерометра здесь выбирается в качестве единственного входного сигнала, например, посредством входного сигнала на основе уравнения сил, взвешиваемого таким образом, чтобы быть проигнорированным в сочетании датчиков, как описано ниже в отношении фиг.4.
Согласно этому варианту осуществления акселерометр, поэтому, главным образом используется, чтобы определять уклон α дороги, когда динамический процесс не протекает в настоящий момент, поскольку акселерометр лучше подходит для обычных ситуаций движения.
Выше описаны варианты осуществления, которые указывают, как сочетание датчиков должно управляться в зависимости от того, протекает или не протекает в настоящее время динамический процесс. Это служит основой для выбора того, как один или более входных сигналов должны быть взвешены, и/или какой один или более весовых коэффициентов должны быть использованы в сочетании датчиков. Это может рассматриваться как различные режимы для сочетания датчиков, выбираемые на основе этого обнаружения, каждый режим имеет один или более предварительно определенных входных сигналов и/или один или более предварительно определенных весовых коэффициентов. Когда сочетание датчиков принимает форму фильтра Калмана, каждый из режимов, следовательно, имеет конкретный вектор y входного сигнала и/или одну или более конкретных ковариационных матриц Q для шума модели.
Обнаружение того, протекает ли в настоящее время динамический процесс, может быть основано на различных параметрах. Согласно варианту осуществления изобретения это обнаружение может быть основано, по меньшей мере, на сигнале, относящемся к торможению. Как описано выше, указанные динамические процессы содержат торможение. Любой подходящий сигнал в системе, который указывает, что торможение имеет место, может, следовательно, быть использован в идентификации динамического процесса. Сигналы тормоза обычно доступны в системах управления транспортного средства, таким образом, использование сигнала тормоза в обнаружении динамического процесса легко реализовать.
Согласно варианту осуществления изобретения обнаружение динамического процесса основано, по меньшей мере, на сигнале, относящемся к скорости транспортного средства. Этот сигнал может, среди прочего, быть использован для определения изменений в ускорении и/или замедлении транспортного средства. Сигналы скорости обычно доступны в системах управления транспортного средства, что полезно при осуществлении изобретения.
Согласно варианту осуществления изобретения обнаружение динамического процесса основано, по меньшей мере, на сигнале, относящемся к радиусу изгиба поворота, выполняемого транспортным средством. Как упомянуто выше, динамические процессы содержат повороты, таким образом, любой подходящий сигнал для радиуса изгиба может быть использован в этом обнаружении. Радиус изгиба может, среди прочего, быть вычислен посредством анализа взаимных различий скорости между внешними и внутренними колесами, когда транспортное средство поворачивает.
Согласно варианту осуществления изобретения обнаружение динамического процесса основано, по меньшей мере, на сигнале, относящемся к выбору передачи. Когда несколько вышеупомянутых динамических процессов подразумевают изменение передачи, их идентификация может быть основана на информации о выбранных передачах и о том, когда изменения передач имеют место. Поскольку настоящее изобретение может, среди прочего, как описано ниже, быть использовано в отношении изменений передач в системе для автоматического выбора передачи, входные сигналы, относящиеся к выбору передачи, будут типично доступны, на основе чего базируется идентификация динамических процессов. Тот факт, что системы для автоматического выбора передачи имеют очень хороший контроль над тем, как и когда будут происходить изменения передач, может быть использован этим вариантом осуществления.
Согласно варианту осуществления настоящего изобретения обнаружение динамического процесса может быть основано на любой подходящей комбинации вышеописанных параметров, т.е., на любой подходящей комбинации сигнала тормоза, сигнала скорости, сигнала радиуса изгиба и сигнала выбора передачи.
Аспект настоящего изобретения относится к способу для выбора передачи в автотранспортном средстве. Согласно этому способу уклон α дороги оценивается, как описано выше, т.е., согласно любому из вариантов осуществления изобретения, описанных выше. Передача затем выбирается на основе оцененного уклона α. Этот способ, например, хорошо пригоден для систем автоматического выбора передачи, поскольку центральным в такой системе является принятие уклона α дороги во внимание при определении сопротивления движению и, следовательно, при определении того, какую передачу выбрать в конкретный момент времени.
Специалист в области техники также поймет, что оценка уклона α дороги может также быть использована для других прикладных задач, отличных от управления автоматическим выбором передачи. Например, уклон α может быть использован в системах круиз-контроля, в системах торможения и в других системах помощи водителю, например, тех, которые помогают водителю ехать с большей экономией топлива.
Фиг.3 является блок-схемой последовательности операций способа для выбора передачи согласно изобретению.
На первом этапе 301 способ обнаруживает, протекает ли в настоящее время, по меньшей мере, один динамический процесс, т.е., влияет ли на транспортное средство, например, крутой поворот, существенное изменение в ускорении или замедлении, торможение во время поворота или запуск или отключение двигателя. В качестве второго этапа 302 способ оценивает уклон α дороги посредством сочетания датчиков, в котором, по меньшей мере, один, по меньшей мере, из двух входных сигналов, основанных, соответственно на акселерометре и уравнении силы и/или, по меньшей мере, один весовой коэффициент для сочетания датчика определяются на основе того, протекает или нет в настоящий момент динамический процесс.
Первый этап 301 и второй этап 302 способа выбора передачи, таким образом, вместе составляют способ оценки уклона α дороги согласно настоящему изобретению.
В качестве третьего этапа 303, способ выбирает передачу на основе оценки уклона α.
Фиг.4 изображает схематичный пример, содержащий некоторые из вариантов осуществления, описанных выше согласно настоящему изобретению. Совместное взвешивание двух входных сигналов на основе акселерометра или уравнения сил может также быть проведено во временном пространстве. Это означает, что сочетание датчиков будет со временем совместно взвешивать два входных сигнала, даже если оно не принимает оба из них во внимание в каждый отдельный момент времени. Другими словами, только один из входных сигналов используется в первый момент времени, а другой используется в последующий, второй момент времени. Со временем, однако, т.е., в течение периода, который содержит оба из этих первого и второго моментов времени, совместное взвешивание во временном пространстве будет, тем не менее, проводиться посредством сочетания датчиков, когда оно выбирает базирование вычислений на обоих из входных сигналов.
Фиг.4 иллюстрирует схематично то, как модель C входного сигнала, ковариантность для шума Q модели и ковариантность для шума R измерения устанавливаются для различных динамических процессов, и то, как они устанавливаются, когда нет протекающего динамического процесса, воздействующего на транспортное средство.
Если обнаруживается динамический процесс торможения во время поворота или запуск или остановка двигателя, сочетание датчиков регулируется посредством C, Q и R, которым задаются значения согласно состоянию 401. В состоянии 401 элементы в матрице для модели C входного сигнала устанавливаются в C=[0 0], что соответствует необновляемому фильтру Калмана. Шум Q модели устанавливается в значение 1*10-5, низкое значение которого делает фильтр медленным. Ковариантность для шума R измерения устанавливается в значение 150*I(2), в котором I(2) является единичной матрицей.
Если обнаруживается динамический процесс поворота без торможения, сочетание датчиков регулируется посредством C, Q и R, которым задаются значения согласно состоянию 402. В состоянии 402 элементы в матрице для модели C входного сигнала устанавливаются в C=[0 1], что означает, что выбран входной сигнал на основе уравнения сил. Шум Q модели устанавливается в значение 1*10-3, что делает фильтр немного быстрее, чем в состоянии 401. Ковариантность для шума R измерения устанавливается в значение 150*I(2), в котором I(2) является единичной матрицей.
Если обнаруживается динамический процесс существенного изменения в ускорении, например, при ускорении из неподвижного состояния или ускорение во время изменения передачи, или динамический процесс существенного изменения замедления, например, во время изменения передачи или торможения, сочетание датчиков регулируется посредством C, Q и R, которым задаются значения согласно состоянию 403. В состоянии 403 элементы в матрице для модели C входного сигнала устанавливаются в C=[g 0], что означает, что выбран входной сигнал на основе акселерометра. Шум Q модели устанавливается в значение 4*10-5, низкое значение которого делает фильтр относительно медленным. Ковариантность для шума R измерения устанавливается в значение 150*I(2), в котором I(2) является единичной матрицей.
Если ни один из этих динамических процессов не обнаруживается, сочетание датчиков регулируется посредством C, Q и R, которым задаются значения согласно состоянию 404. В состоянии 404 элементы в матрице для модели C входного сигнала устанавливаются в C=[g 0], что означает, что выбран входной сигнал на основе акселерометра. Шум Q модели устанавливается в значение 1*10-3, что несколько выше, чем значение в состояниях 401 и 403, и делает фильтр немного быстрее, чем в этих состояниях. Ковариантность для шума R измерения устанавливается в значение 150*I(2), в котором I(2) является единичной матрицей.
Как иллюстрировано на фиг.4, сочетание датчиков будет регулироваться в зависимости от ситуаций движения транспортного средства, что означает, что входной сигнал акселерометра выбирается в определенных ситуациях движения, а входной сигнал уравнения сил - в других ситуациях движения. Это дает в результате в течение периода различные оценки уклона α дороги в различные моменты времени, в которые различные оценки имеют различные входные сигналы. Совместное взвешивание этих различных входных сигналов происходит в динамике по времени, т.е., совместное взвешивание двух входных сигналов во временном пространстве.
Специалист в области техники поймет, что способ оценки уклона α дороги и способ выбора передачи согласно настоящему изобретению могут также быть реализованы в компьютерной программе, которая, когда выполняется на компьютере, побуждает компьютер применять способ. Компьютерная программа обычно принимает форму компьютерного программного продукта 503 (на фиг.5), сохраненного на цифровом носителе хранения, компьютерная программа содержится на машиночитаемом носителе компьютерного программного продукта. Упомянутый машиночитаемый носитель содержит подходящую память, например, ROM (постоянное запоминающее устройство), PROM (программируемое постоянное запоминающее устройство), EPROM (стираемое ROM), флэш-память, EEPROM (электрически стираемое PROM), накопитель на жестком диске и т.д.
Фиг.5 изображает схематично блок 500 управления, содержащий блок 501 вычисления, который может принимать форму, по существу, любого подходящего типа процессора или микрокомпьютера, например, схему для цифровой обработки сигнала (цифровой сигнальный процессор, DSP) или схему с предварительно определенной специальной функцией (специализированная интегральная схема, ASIC). Блок 501 вычисления соединен с блоком 502 памяти, который расположен в блоке 500 управления и который предоставляет блоку вычисления, например, сохраненный программный код и/или сохраненные данные, которые необходимы блоку вычисления, чтобы предоставлять ему возможность выполнять вычисления. Блок 501 вычисления также приспособлен для хранения частичных или конечных результатов вычислений в блоке 502 памяти.
Блок 500 управления дополнительно снабжен соответствующими устройствами 511, 512, 513, 514 для приема и отправки входных и выходных сигналов. Эти входные и выходные сигналы могут содержать колебания, импульсы или другие атрибуты, которые устройства 511, 513 приема входных сигналов могут обнаруживать в качестве информации и которые могут быть преобразованы в сигналы, которые блок 501 вычисления может обрабатывать. Эти сигналы затем подаются в блок вычисления. Устройства 512, 514 отправки выходных сигналов выполнены с возможностью преобразования сигналов, принятых от блока вычисления, для того, чтобы, например, посредством их модуляции, формировать выходные сигналы, которые могут быть переданы другим частям системы для оценки уклона α дороги или системе для выбора передачи.
Каждое из соединений с соответствующими устройствами для приема и отправки входных и выходных сигналов может принимать форму одного или более из кабеля, шины данных, например, CAN-шины (локальная сеть контроллеров), MOST-шины (шина передачи данных мультимедийных систем) или некоторой другой шинной конфигурации или беспроводного соединения.
Специалист в области техники поймет, что вышеупомянутый компьютер может принимать форму блока 501 вычисления и что вышеупомянутая память может принимать форму блока 502 памяти.
Аспект настоящего изобретения относится к системе для оценки уклона α дороги в транспортных средствах с помощью сочетания датчиков. Система содержит здесь средство обнаружения, приспособленное, чтобы обнаруживать, воздействует ли, по меньшей мере, один динамический процесс на транспортное средство. Система содержит также средство оценки, приспособленное, чтобы оценивать упомянутый уклон α. Оценка подразумевает средство оценки, определяющее регулировку сочетания датчиков согласно способу, описанному выше, т.е., определяющее, по меньшей мере, один, по меньшей мере, из двух входных сигналов и/или, по меньшей мере, один весовой коэффициент для сочетания датчиков на основе обнаружения того, существует ли в текущий момент какой-либо динамический процесс, так что проводится совместное взвешивание, по меньшей мере, двух входных сигналов.
Аспект настоящего изобретения относится к системе для выбора передачи в автотранспортном средстве. Система содержит здесь систему для оценки уклона α дороги, как описано выше, и средство выбора передачи, например, автоматическую коробку передач, приспособленную выбирать передачи на основе оценки уклона α дороги.
Специалист в области техники также поймет, что вышеописанная система может быть модифицирована согласно различным вариантам осуществления способа согласно изобретению.
Изобретение относится также к автотранспортному средству 100, например, легковому автомобилю, грузовику или автобусу, снабженному, по меньшей мере, системой для оценки уклона α дороги или системой для выбора передачи.
Настоящее изобретение не ограничено вариантами осуществления изобретения, описанными выше, а относится к и содержит все варианты осуществления в рамках защиты приложенных независимых пунктов формулы изобретения.
Реферат
Изобретение относится к оценке уклона дороги. Способ оценки уклона дороги в транспортном средстве с использованием сочетания датчиков содержит этапы, на которых обнаруживают, воздействует ли динамический процесс на упомянутое транспортное средство, и оценивают уклон, проводя совместное взвешивание двух входных сигналов для упомянутого сочетания датчиков. Упомянутые входные сигналы содержат входной сигнал на основе акселерометра и входной сигнал на основе уравнения сил. Один из упомянутых двух входных сигналов и/или весовой коэффициент для сочетания датчиков определяются на основе обнаружения того, воздействует ли динамический процесс на транспортное средство. Способ выбора передачи в моторном транспортном средстве характеризуется вышеуказанной оценкой уклона дороги и выбором передачи на основе упомянутой оценки упомянутого уклона. Повышается эффективность и надежность оценки уклона. 4 н. и 23 з.п. ф-лы, 5 ил.
Формула
- обнаруживают, воздействует ли, по меньшей мере, один динамический процесс на упомянутое транспортное средство, и
- оценивают упомянутый уклон α, проводя совместное взвешивание, по меньшей мере, двух входных сигналов для упомянутого сочетания датчиков, так что
- упомянутые, по меньшей мере, два входных сигнала содержат входной сигнал на основе акселерометра и входной сигнал на основе, по меньшей мере, одного уравнения сил, и
- по меньшей мере, один из упомянутых, по меньшей мере, двух входных сигналов и/или, по меньшей мере, один весовой коэффициент для упомянутого сочетания датчиков определяются на основе упомянутого обнаружения того, воздействует ли упомянутый, по меньшей мере, один динамический процесс на упомянутое транспортное средство.
- ускорение из неподвижного состояния, и
- ускорение во время изменения передачи.
- упомянутый, по меньшей мере, один из упомянутых, по меньшей мере, двух входных сигналов взвешивается, так что упомянутому входному сигналу на основе упомянутого акселерометра (207) задается большее влияние в упомянутом сочетании датчиков, чем упомянутому входному сигналу на основе упомянутого уравнения сил, и
- упомянутый, по меньшей мере, один весовой коэффициент определяется в значение, так что чувствительность в сочетании датчиков для упомянутого входного сигнала меньше, чем если бы динамические процессы не воздействовали на упомянутое транспортное средство.
- замедление во время изменения передачи,
- торможение и
- торможение до остановки.
- упомянутый, по меньшей мере, один из упомянутых, по меньшей мере, двух входных сигналов взвешивается, так что упомянутому входному сигналу на основе акселерометра (207) задается большее влияние, чем упомянутому входному сигналу на основе упомянутого уравнения сил, и
- упомянутый, по меньшей мере, один весовой коэффициент определяется в значение, так что чувствительность в сочетании датчиков для упомянутого входного сигнала меньше, чем если бы динамические процессы не воздействовали на упомянутое транспортное средство.
- упомянутый, по меньшей мере, один из упомянутых, по меньшей мере, двух входных сигналов взвешивается, так что упомянутому входному сигналу на основе акселерометра (207) задается большее влияние, чем упомянутому входному сигналу на основе упомянутого уравнения сил, и
- упомянутый, по меньшей мере, один весовой коэффициент определяется в значение, так что чувствительность в сочетании датчиков для упомянутого входного сигнала регулируется до уровня шума упомянутого акселерометра (207).
- сигнале тормоза,
- сигнале, относящемся к скорости транспортного средства,
- сигнале, относящемся к радиусу изгиба, и
- сигнале, относящемся к выбору передачи.
- упомянутая модель используется в прогнозировании значений, соответствующих упомянутым, по меньшей мере, двум входным сигналам, и
- упомянутое совместное взвешивание модели с упомянутыми, по меньшей мере, двумя входными сигналами основано на величине шума измерения, относящегося к упомянутому, по меньшей мере, одному входному сигналу.
- крутой поворот,
- существенное изменение ускорения,
- существенное изменение замедления,
- торможение во время поворота,
- запуск двигателя и
- отключение двигателя.
- оценкой уклона α дороги посредством способа по любому из пп. 1-22 и
- выбором передачи на основе упомянутой оценки упомянутого уклона α.
- средством обнаружения, приспособленным обнаруживать, воздействует ли, по меньшей мере, один динамический процесс на упомянутое транспортное средство, и
- средством оценки, приспособленным оценивать упомянутый уклон α дороги, проводя совместное взвешивание, по меньшей мере, двух входных сигналов для упомянутого сочетания датчиков, так что
- упомянутые, по меньшей мере, два входных сигнала содержат входной сигнал на основе акселерометра и входной сигнал на основе, по меньшей мере, одного уравнения сил, и
- упомянутое средство оценки приспособлено определять, по меньшей мере, один из упомянутых, по меньшей мере, двух входных сигналов и/или, по меньшей мере, один весовой коэффициент для упомянутого сочетания датчиков на основе упомянутого обнаружения того, воздействует ли упомянутый, по меньшей мере, один динамический процесс на упомянутое транспортное средство.
- системой для оценки уклона α дороги по п. 27 и
- средством выбора передачи, приспособленным выбирать передачи на основе упомянутой оценки упомянутого уклона α дороги.
Комментарии