Способ обнаружения ошибок при определении углового пространственного положения с помощью магнитометрических измерений - RU2702937C2
Код документа: RU2702937C2
Чертежи


Описание
Ссылка на родственную заявку
Настоящая заявка испрашивает приоритет в соответствии с предварительной заявкой на выдачу патента США №62/066,133, поданной 20 октября 2014 года, содержание которой включено в настоящий документ посредством ссылки.
Уровень техники
В целях обеспечения безопасности полетов необходимо выявлять ошибки при определении углового пространственного положения. Один из стандартных способов обнаружения таких ошибок заключается в использовании систем определения углового пространственного положения с резервированием в сочетании с методом сравнения определенного типа. Если резервирование сводится всего лишь к двум системам определения углового пространственного положения, показания которых отличаются друг от друга, то определить, какая из этих систем выдает ложные данные, может оказаться непростой задачей. В этом случае и, в целом, в большинстве других случаев необходима некая система, которая могла бы выявлять ошибки при определении углового пространственного положения. Система, способная обнаруживать такие ошибки, называется прибором контроля углового пространственного положения.
Сущность изобретения
В одном из примеров осуществления настоящего изобретения предложена система бортовой радиоэлектронной аппаратуры. Эта система бортовой радиоэлектронной аппаратуры содержит один или несколько источников данных об угловом пространственном положении, каждый из которых выполнен с возможностью генерирования соответствующего вычисленного решения по угловому пространственному положению; по меньшей мере, один магнитометр, выполненный с возможностью измерения магнитного поля в рамках системы бортовой радиоэлектронной аппаратуры; и, по меньшей мере, один прибор контроля углового пространственного положения, выполненный с возможностью использования соответствующего вычисленного решения по угловому пространственному положению, полученного, по меньшей мере, с одного или нескольких источников данных об угловом пространственном положении, для представления, по меньшей мере, одной предварительной оценки по измеренному магнитному полю или предварительной оценки по модели магнитного поля Земли так, чтобы эти оценки по измеренному магнитному полю и модели магнитного поля Земли были в единой общей системе координат. По меньшей мере, один прибор контроля углового пространственного положения выполнен с дополнительной возможностью определения разницы между предварительной оценкой по измеренному магнитному полю и предварительной оценкой по модели магнитного поля Земли в единой общей системе координат. По меньшей мере, один прибор контроля углового пространственного положения выполнен с дополнительной возможностью выдачи аварийного сообщения о том, что соответствующее вычисленное решение по угловому пространственному положению, использованное для представления, по меньшей мере, или предварительной оценки по измеренному магнитному полю, или предварительной оценки по модели магнитного поля Земли, является ложным, если соответствующая разница между предварительной оценкой по измеренному магнитному полю и предварительной оценкой по модели магнитного поля Земли превышает заданное пороговое значение.
Краткое описание чертежей
С учетом того, что на чертежах представлены лишь примеры осуществления настоящего изобретения, которые, соответственно, не следует рассматривать как ограничивающие его объем, указанные примеры реализации заявленного изобретения будут описаны с указанием особых отличительных признаков и деталей в привязке к прилагаемым чертежам, где:
На фиг. 1 представлена блок-схема одного из вариантов реализации иллюстративной системы отслеживания ошибок при определении углового пространственного положения.
На фиг. 2 представлена блок-схема другого варианта реализации иллюстративной системы отслеживания ошибок при определении углового пространственного положения.
На фиг. 3 представлена блок-схема еще одного варианта реализации иллюстративной системы отслеживания ошибок при определении углового пространственного положения.
На фиг. 4 приведен пример сравнения векторов магнитного поля, используемых при отслеживании ошибок в ходе определения углового пространственного положения.
На фиг. 5 представлена блок-схема, иллюстрирующая один из вариантов реализации иллюстративного способа отслеживания ошибок при определении углового пространственного положения.
Согласно общепринятой практике различные описанные признаки не вычерчены в масштабе, а представлены таким образом, чтобы подчеркнуть отличительные признаки, характерные для вариантов осуществления настоящего изобретения.
Подробное описание изобретения
В следующем подробном описании даны ссылки на прилагаемые чертежи, являющиеся его неотъемлемой частью, на которых изображены конкретные варианты реализации настоящего изобретения, приведенные в качестве примера. Однако следует понимать, что могут быть использованы и иные варианты осуществления настоящего изобретения, и что в логическую, механическую и электрическую части могут быть внесены определенные изменения. Кроме того, способ, проиллюстрированный на чертежах, и само описание не должны рассматриваться как ограничивающие порядок, в котором должны выполняться отдельные стадии описываемого способа. Таким образом, нижеследующее подробное описание не следует рассматривать в ограничительном смысле.
Варианты реализации заявленного изобретения, описанные в настоящем документе, позволяют использовать магнитометр для выявления ошибок при определении углового пространственного положения, а не для измерения самого углового пространственного положения. Иначе говоря, магнитометр используется для того, чтобы определить, не является ли угловое пространственное положение, уже зафиксированное системой, ошибочным. Кроме того, в архитектуре некоторых самолетов уже предусмотрен магнитометр для определения магнитного курса. В этом случае магнитометр может быть выполнен с возможностью выявления ошибок при определении углового пространственного положения без использования дополнительных аппаратных средств.
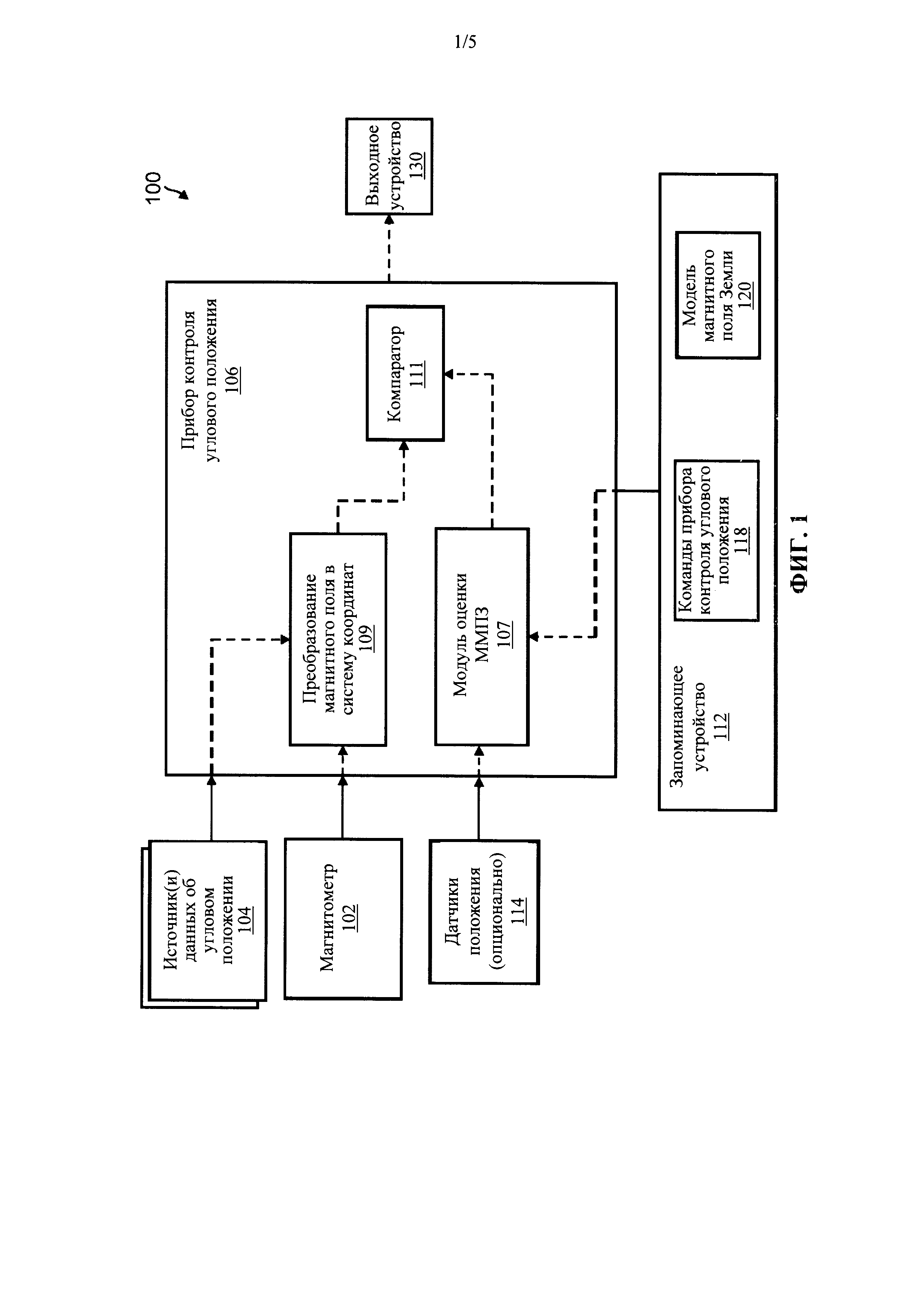
На фиг. 1 представлена блок-схема одного из вариантов реализации системы (100) отслеживания ошибок при определении углового пространственного положения. Система (100) включает в себя магнитометр (102), один и или несколько источников (104) данных об угловом пространственном положении и прибор (106) контроля углового пространственного положения. Один и или несколько источников (104) данных об угловом пространственном положении могут быть реализованы с использованием систем, хорошо известным специалистам в данной области техники, таких как, помимо прочего, блок воздушных сигналов и инерциальной системы (ADIRU), опорный инерциальный блок (IRU), или блок определения курса и углового пространственного положения (AHRU). Каждый из источников (104) данных об угловом пространственном положении, содержит элементы, обеспечивающие вычисление углового пространственного положения, такие как, помимо прочего, один или несколько гироскопических датчиков угловой скорости и один или несколько акселерометров. Гироскопические датчики угловой скорости выполнены с возможностью измерения угловой скорости относительно заданной оси. Кроме того, в некоторых вариантах осуществления настоящего изобретения в качестве одного их элементов источника (104) данных об угловом пространственном положении используется магнитометр (102). Однако для наглядности представления магнитометр (102) изображен и описан отдельно от источника (104) данных об угловом пространственном положении.
В этом примере магнитометр (102) представляет собой трехосевой магнитометр. Трехосевой магнитометр (102) измеряет интенсивность магнитного поля по трем независимым осям. В некоторых вариантах реализации эти три независимые оси являются осями прямоугольных координат. В других вариантах осуществления настоящего изобретения эти три независимые оси не являются ортогональными, хотя и по-прежнему независимыми. Система (100) также содержит один или несколько датчиков положения, таких как, помимо прочего, приемники глобальной навигационной спутниковой системы (ГНСС) или инерциальные навигационные системы отсчета (IRS). Датчики (114) положения выполняют дополнительные измерения, результаты которых используются для определения местоположения самолета (например, широты, долготы и высоты над уровнем моря). Пригодные для использования датчики положения хорошо известны специалистам в данной области техники, и подробно не описаны в настоящем документе.
Прибор (106) контроля углового пространственного положения может быть реализован на базе центрального процессора (ЦП), микроконтроллера, микропроцессора (например, цифрового сигнального процессора (ЦСП)), программируемой логической интегральной схемы типа FPGA, специализированной заказной интегральной схемы (ASIC) и прочих устройств обработки данных. Запоминающее устройство (112) может представлять собой материальный носитель данных, например, магнитный или оптический носитель. К примеру, в качестве материального носителя данных может быть использован обычный жесткий диск, компакт-диск (доступный только для чтения или перезаписываемый), энергозависимый или энергонезависимый носитель, такой как оперативное запоминающее устройство (ОЗУ), в том числе, помимо прочего, синхронное динамическое запоминающее устройство с произвольной выборкой (SDRAM), ОЗУ с удвоенной скоростью передачи данных (DDR), усовершенствованная динамическая память компании Rambus с внутренней шиной (RDRAM), статическое оперативное запоминающее устройство (СОЗУ) и т.п., постоянное запоминающее устройство (ПЗУ), электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ), флэш-память и т.д.
Например, в этом варианте осуществления настоящего изобретения прибор (106) контроля углового пространственного положения реализован на базе центрального процессора, который включает в себя или работает с программными продуктами, программно-аппаратными средствами или иными машиночитаемыми командами, хранящимися в запоминающем устройстве (112), для реализации различных способов, задач по обработке данных, вычислений и функций управления, используемых для калибровки и коррекции магнитометра. Например, согласно этому варианту осуществления настоящего изобретения в запоминающем устройстве (112) хранятся команды (118) для прибора контроля углового пространственного положения, которые при их исполнении процессором инициируют выполнение процессором одной или нескольких операций, описанных в настоящем документе, по отслеживанию источника данных об угловом пространственном положении. Кроме того, в этом примере в запоминающем устройстве (112) хранится модель магнитного поля Земли (ММПЗ) (120). Один из примеров такой модели, носящий неограничительный характер, известный как Международный эталон геомагнитного поля (IGRF), выложен в открытый доступ Международной ассоциацией по геомагнетизму и аэрономии (IAGA). Другим примером такой модели, также носящим неограничительный характер, служит Магнитная модель мира (WMM), выложенная в открытый доступ Национальным управлением по исследованию океанов и атмосферы (NOAA). Хотя в этом примере команды (118) для прибора контроля углового пространственного положения и ММПЗ (120) хранятся на одном и том же запоминающем устройстве (112), следует понимать, что в других вариантах реализации заявленного изобретения могут быть использованы отдельные запоминающие устройства.
Во время работы прибор (106) контроля углового пространственного положения получает результаты измерений положения с датчика (114) положения, расчетное решение по угловому пространственному положению с источника (104) данных об угловом пространственном положении и предварительную оценку по измеренному магнитному полю с магнитометра (102). Исходя из предварительной оценки положения, полученной с датчика (114) положения, прибор (106) контроля углового пространственного положения рассчитывает предварительную оценку по модели магнитного поля Земли (например, в модуле (107) оценки по ММПЗ). В частности, прибор (106) контроля углового пространственного положения использует предварительные значения широты, долготы, высоты над уровнем моря и времени в качестве исходных данных для модели (120) магнитного поля Земли с целью вычисления расчетного значения магнитного поля по модели магнитного поля Земли. Модель магнитного поля Земли выполнена в эталонной системе координат, такой как географическая система координат, оси которой направлены на север, восток и вдоль местной вертикали (NED), или локальная система координат, ориентированная на север (NOLL). Для сравнения, предварительная оценка по измеренному магнитному полю, полученная с магнитометра (102), выполнена в системе координат корпуса летательного аппарата.
Прибор (106) контроля пространственного положения выполнен с возможностью переноса или преобразования, по меньшей мере, одной из предварительных оценок - или по измеренному магнитному полю, или по ММПЗ - в единую общую систему координат (например, в модуле (109) преобразования магнитного поля в систему координат). Единая общая система координат означает, что предварительная оценка по ММПЗ и предварительная оценка по измеренному магнитному полю находятся в одной и той же системе координат. Например, в этом варианте осуществления настоящего изобретения прибор (106) контроля углового пространственного положения выполнен с возможностью переноса предварительной оценки по измеренному магнитному полю в эталонную систему координат предварительной оценки по ММПЗ, исходя из решения по угловому пространственному положению, сгенерированного источником (104) данных об угловом пространственном положении. В альтернативном варианте в других примерах осуществления настоящего изобретения прибор (106) контроля углового пространственного положения выполнен с возможностью переноса предварительной оценки по модели магнитного поля Земли в систему координат корпуса летательного аппарата, исходя из решения по угловому пространственному положению, сгенерированного источником (104) данных об угловом пространственном положении. В других вариантах реализации заявленного изобретения прибор (106) контроля углового пространственного положения преобразует каждую из предварительных оценок по ММПЗ и по измеренному магнитному полю в общую систему координат, которая не является ни эталонной системой координат предварительной оценки по ММПЗ, ни системой координат корпуса летательного аппарата.
Кроме того, в некоторых вариантах осуществления настоящего изобретения датчик (114) положения не предусмотрен, и предварительная оценка по модели магнитного поля Земли вычисляется по предварительным оценкам положения, полученным от источника (104) данных об угловом пространственном положении. После переноса предварительной оценки по измеренному магнитному полю в эталонную систему координат предварительной оценки по ММПЗ прибор (106) контроля углового пространственного положения сравнивает предварительную оценку по измеренному магнитному полю с предварительной оценкой по ММПЗ (например, в компараторе (111)). Если разница между предварительной оценкой по измеренному магнитному полю и предварительной оценкой по ММПЗ превышает заданное пороговое значение, то прибор (106) контроля углового пространственного положения выдает предупреждение на выходной устройство (130), так как эта разница обусловлена ошибкой в решении по угловому пространственному положении, использованном для переноса предварительной оценки по измеренному магнитному полю в эталонную систему координат. В некоторых вариантах осуществления настоящего изобретения выходным устройством служит блок индикации. В других вариантах реализации заявленного изобретения предупреждение может быть передано на аудиоустройство, непосредственно на органы управления самолетом или на иной выходной блок, использующий решение по угловому пространственному положению.
Если указанная разница не превышает заданное пороговое значение, прибор (106) контроля углового пространственного положения может повторить весь процесс при получении этим прибором (106) новых данных и/или другого вычисленного решения по угловому пространственному положению. Например, в качестве порогового значения для выявления ошибок в определении углового пространственного положения может быть задано ±5 градусов тангажа и ±10 градусов крена. Следует понимать, что эти значения приведены исключительно для примера, и что они не носят ограничительного характера.
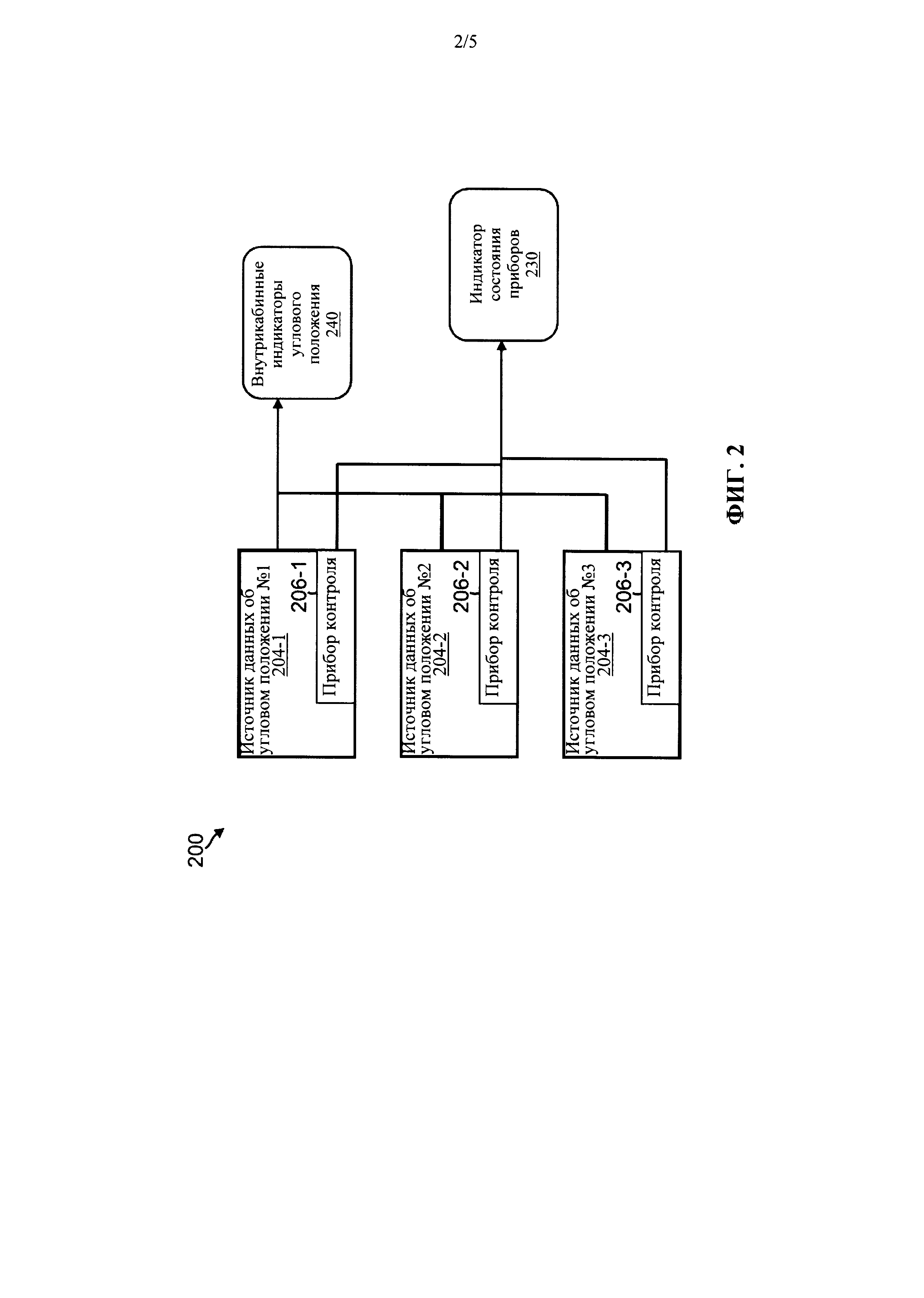
Как было отмечено выше, прибор (106) контроля углового пространственного положения может быть реализован через исполняемые команды, инициирующие выполнение, по меньшей мере, одним процессором операций, описанных в настоящем документе. Таким образом, соответствующие приборы (106) контроля углового пространственного положения могут быть встроены в каждый из множества источников (204) данных об угловом пространственном положении, как это показано на фиг. 2. Хотя на фиг. 2 изображено три источника данных об угловом пространственном положении ((204-1)…(204-3)), в альтернативных вариантах осуществления настоящего изобретения система (200) может содержать большее или меньшее количество таких источников. Каждый из трех источников (204) данных об угловом пространственном положении выдает данные на один или несколько внутрикабинных индикаторов (240), которые передают информацию о результатах измерения углового пространственного положения самолета членам экипажа.
В некоторых случаях один или несколько источников (204) данных об угловом пространственном положении могут начать функционировать ненадлежащим образом. В таких случаях навигационные системы обычного типа могут оказаться не в состоянии определить, какой из оставшихся в работе источников (204) работает некорректно. В вариантах реализации заявленного изобретения, описанных в настоящем документе, во избежание такой ситуации используются соответствующие приборы (205) контроля углового пространственного положения. В частности, каждый из источников (204) данных об угловом пространственном положении снабжен своим собственным прибором (206) контроля, который идентифицирует подозрительные или ложные данные с соответствующего источника (204), используя методики, описанные в настоящем документе. Соответствующий прибор (206) контроля углового пространственного положения генерирует аварийный сигнал, который передается на выходное устройство (230) такое, как, например, индикатор состояния приборов, когда обнаруживается, что ошибка в данных об угловом пространственном положении превышает заданное пороговое значение. В других вариантах реализации заявленного изобретения могут быть использованы иные выходные устройства, описанные выше. В некоторых вариантах осуществления настоящего изобретения аварийный сигнал или сообщение передается, например, на внутрикабинный индикатор (240) углового пространственного положения.
Хотя в примере, приведенном на фиг. 2, приборы (206) контроля углового пространственного положения являются неотъемлемой частью источников (204) данных об угловом пространственном положении, в других вариантах осуществления настоящего изобретения приборы контроля реализованы за пределами источников данных об угловом пространственном положении. Например, приборы контроля могут быть реализованы в бортовом радиоэлектронном оборудовании, связанном с внутрикабинными индикаторами (240) углового пространственного положения, выходным устройством (230) и другой бортовой радиоэлектронной аппаратурой. Кроме того, хотя в примере, приведенном на фиг. 2, каждый источник (204) данных об угловом пространственном положении снабжен отдельным прибором (206) контроля, в других вариантах осуществления настоящего изобретения для всех источников данных об угловом пространственном положении может быть предусмотрен один общий прибор контроля. Например, как показано на фиг. 3, один внешний прибор (306) контроля предусмотрен для всех трех источников (304) данных об угловом пространственном положении.
Помимо того, что прибор (206) контроля углового пространственного положения определяет, не превышает ли решение по угловому пространственному положению заданное пороговое значение, каждый из этих приборов может быть использован для того, чтобы определить, не превышается ли заданное пороговое значение чувствительности соответствующего прибора (206). Иными словами, если уровень чувствительности прибора (206) контроля углового пространственного положения не превышает пороговое значение, то определить действительность показаний этого прибора будет невозможно. Например, для блока AHRU пороговое значение прибора отслеживания ошибок по угловому пространственному положению может быть задано в соответствии с нормальным предполагаемым уровнем погрешности при определении углового пространственного положения, составляющим, к примеру, 2° ошибки по тангажу и крену. При этом, если прибор (206) отслеживания ошибок по угловому пространственному положению должен обеспечивать предельный безопасный уровень тангажа в 5°, то чувствительность к погрешностям углового пространственного положения в 5° должна превышать указанный порог в 2°, чтобы прибор (206) контроля углового пространственного положения мог получить пригодные для использования результаты.
На фиг. 4 приведен пример сравнения векторов магнитного поля, которые используются для отслеживания ошибок при определении углового пространственного положения, как это было описано выше. Следует иметь в виду, что хотя рассматриваемый пример показан в двух измерениях, фактическое отслеживание может осуществляться во всех трех измерениях, включая крен, тангаж и курс, вместе со всеми компонентами векторов магнитного поля. На фиг. 4 приведен пример, где значения источника данных об угловом пространственном положении, такого как система IRS или блок AHRU, не превышают заданный пороговый уровень, что указывает на отсутствие ошибок при определении углового пространственного положения, превышающих допустимые. На фиг. 4 это обозначено вектором mmeasured, расположенным между осью, указывающей на истинный север, и вектором порогового уровня. Уровень чувствительности прибора контроля выше порогового уровня, а это говорить о том, что ошибки при определении углового пространственного положения достаточно хорошо поддаются измерениям для получения прибором контроля достоверных результатов. На фиг. 4 это обозначено вектором порогового уровня, расположенным между осью, указывающей на истинный север, и вектором уровня чувствительности. Следует понимать, что способ отслеживания ошибок при определении углового пространственного положения, описанный ниже, используется для проверки отдельного источника данных об угловом пространственном положении, но он может быть применен для проверки множества таких источников по отдельности. Иллюстративные векторы, показанные на фиг. 4, определяются следующим образом:
- mestimated = вектор расчетного магнитного поля, взятый моделью магнитного поля Земли (ММПЗ) по текущему местоположению и времени (обозначен в настоящем документе также как mtruth)
- mmeasured = вектор измеренного магнитного поля, спроецированный на эталонную систему координат, такую как NED (оси которой направлены на север, восток и вдоль местной вертикали), с использованием отслеживаемого источника данных об угловом пространственном положении.
В общем, отслеживание ошибок при определении углового пространственного положения предусматривает вычисление скалярного произведения двух магнитных векторов и определение того, не превышают ли полученные результаты пороговый уровень. Кроме того, прибор контроля показывает, достоверны или нет полученные результаты. Считается, что прибор, используемый для измерения магнитного поля, исправен и характеризуется допустимым уровнем погрешностей. В некоторых вариантах осуществления настоящего изобретения логика обнаружения неисправности отдельного источника данных об угловом пространственном положении может быть описана следующим образом:
- Если уровень чувствительности не превышает пороговый уровень, то данные, полученные прибором контроля, являются недостоверными.
- Если уровень чувствительности превышает пороговый уровень, то данные, полученные прибором контроля, являются достоверными.
- Если данные, полученные прибором контроля, являются достоверными, а значение (mmeasured⋅mtruth) превышает пороговый уровень, это значит, что источник данных об угловом пространственном положении вышел из строя.
- В противном случае источник данных об угловом пространственном положении считается исправным.
Кроме того, в некоторых вариантах реализации заявленного изобретения логика обнаружения неисправности множества источников данных об угловом пространственном положении может быть описана следующим образом:
- Если уровень чувствительности заданного источника данных об угловом пространственном положении не превышает пороговый уровень, то данные, полученные прибором контроля по данному конкретному источнику данных, являются недостоверными.
- Если уровень чувствительности заданного источника данных об угловом пространственном положении превышает пороговый уровень, то данные, полученные прибором контроля по данному конкретному источнику данных, являются достоверными.
- Если данные, полученные прибором контроля по данному конкретному источнику данных, являются достоверными, а значение (mmeasured⋅mtruth) по данному источнику данных превышает пороговый уровень, но при этом оно хуже, чем по всем остальным источникам данных с достоверными результатами, показанными приборами контроля (т.е. (mmeasured⋅mtruth) по данному источнику данных превышает порог на большую величину, чем (mmeasured⋅mtruth) по какому-либо другому источнику данных), то данный конкретный источник данных об угловом пространственном положении считается неисправным.
- В противном случае источник данных об угловом пространственном положении считается исправным.
Кроме того, в отношении нижеприведенных математических выражений используются следующие определения:
-

-

-

-

-

-

Из вышеприведенных определений следует, что

Показатель качества отслеживаемого источника данных об угловом пространственном положении может быть выражен таким образом:
Показатель качества эквивалентен косинусу угла (γ) между вектором измеренного магнитного поля и вектором «истинного» магнитного поля, поскольку скалярное произведение двух векторов составляет

Желательно определить чувствительность показателя качества к различным источникам ошибок (ошибок при определении углового пространственного положения, ошибок магнитных измерений и ошибок истинной магнитной модели) таким образом, чтобы можно было удостовериться в том, что ошибки при определении углового пространственного положения обнаруживаются раньше ошибок магнитных измерений, а также использовать чувствительность для задания уровня и пороговых значений принятия решений. В некоторых вариантах осуществления настоящего изобретения ошибки истинной магнитной модели могут быть приравнены к нулю; при этом предполагается, что истинная магнитная модель будет реализована в приборе отслеживания ошибок при определении углового пространственного положения таким образом, чтобы ошибки истинной магнитной модели соотносились с ошибками магнитных измерений лучше, чем 1/10. Соответственно, чувствительность показателя качества может быть приближена к первому порядку в зависимости от ошибок при определении углового пространственного положения и ошибок магнитных измерений, что записывается следующим образом:
Таким образом, величина δQ может быть использована для задания порогового значения при реализации прибора контроля углового пространственного положения в реальном масштабе времени с тем, чтобы определить, не превышает ли источник данных об угловом пространственном положении некий уровень, представляющий интерес, например, уровень нормальных ожидаемых ошибок. Кроме того, в некоторых вариантах осуществления настоящего изобретения результаты, полученные прибором контроля углового пространственного положения, используются лишь тогда, когда чувствительность к ошибкам при определении углового пространственного положения превышает некий минимальный уровень, например, когда указанная чувствительность к безопасному пределу превышает заданное пороговое значение.
Приведенное выше уравнение чувствительности может быть упрощено для внедрения в систему реального времени, где истинное угловое пространственное положение





Для знаменателя первого члена абсолютная величина вектора будет одинаковой вне зависимости от системы координат, т.е.


Следовательно, весь второй член может быть заменен выражением

Таким образом, как было отмечено выше, прибор контроля может использовать представленное выше уравнение и значения, чтобы задать свое пороговое значение и определить, не превышает ли чувствительность к ошибкам при определении углового пространственного положения некий минимальный уровень.
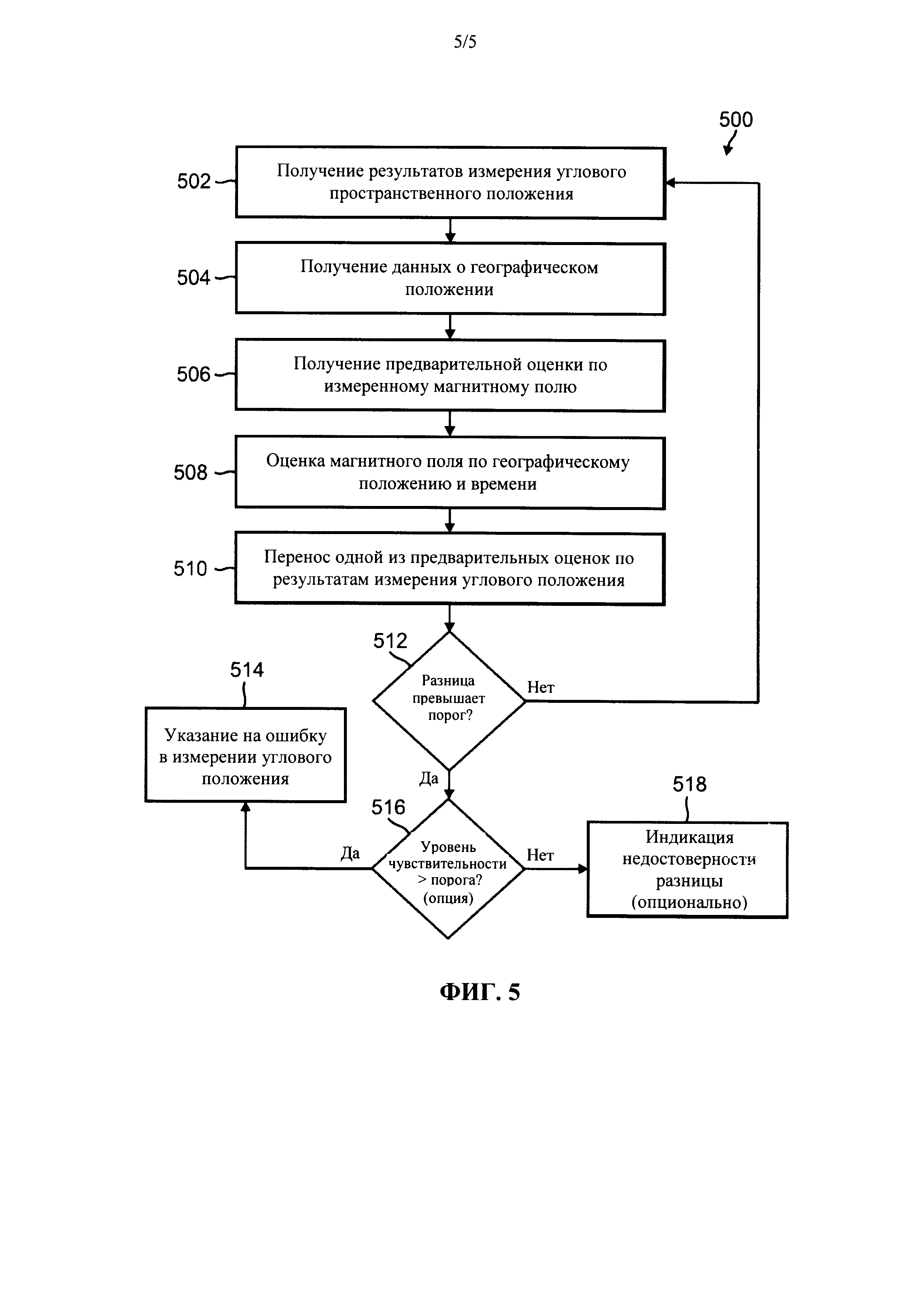
На фиг. 5 представлена блок-схема, иллюстрирующая один из вариантов реализации иллюстративного способа (500) отслеживания ошибок при определении углового пространственного положения. Следует понимать, что хотя способ (500) описывается в порядке выполнения его стадий, отдельные операции могут выполняться в ином порядке или параллельно другим операциям.
На стадии (502) с опорной системы ориентации (именуемой в настоящем документе также источником данных об угловом пространственном положении) поступает решение об угловом пространственном положении, как это описано выше. На стадии (504) обеспечивается получение данных о географическом положении, что также описано выше. Например, данные о географическом положении могут быть определены по результатам измерения положения датчиком положения или по предварительным расчетам положения, полученным от источника данных об угловом пространственном положении. На стадии (506) обеспечивается получение результатов измерения магнитного поля (именуемых в настоящем документе также предварительной оценкой по измеренному магнитному полю), например, с помощью магнитометра, описанного выше. На стадии (508) осуществляется вычисление предварительной оценки по модели магнитного поля Земли (именуемой в настоящем документе также предварительной оценкой по ММПЗ), исходя из данных о географическом положении и времени. Например, географическое положение и момент времени, в который были получены результаты измерения положения, могут быть использованы в качестве указателя на модель магнитного поля Земли.
На стадии (510), по меньшей мере, одна из предварительных оценок по магнитному полю переносится или преобразуется на основании решения по угловому пространственному положению таким образом, чтобы указанные предварительные оценки по магнитному полю оказались в единой общей системе координат. Например, одна из предварительных оценок по магнитному полю может быть преобразована в систему координат другой оценки, исходя из решения по угловому пространственному положению. В частности, или предварительная оценка по измеренному магнитному полю переносится в эталонную систему координат предварительной оценки по ММПЗ, исходя из полученного решения об угловом пространственном положении, или предварительная оценка по ММПЗ переносится в систему координат предварительной оценки по измеренному магнитному полю, исходя из полученного решения по угловому пространственному положению, как это было описано выше. В других вариантах осуществления настоящего изобретения единой общей системой координат не служит ни система координат предварительной оценки по измеренному магнитному полю, ни система координат предварительной оценки по ММПЗ, и обе указанные предварительные оценки по магнитному полю преобразуются в отдельную единую общую систему координат.
На стадии (512) определяется, не превышает ли разница между предварительной оценкой по измеренному магнитному полю и предварительной оценкой по ММПЗ в единой общей системе координат заданное пороговое значение. Например, если предварительная оценка по измеренному магнитному полю была перенесена в систему координат предварительной оценки по ММПЗ, то с заданным пороговым значением сравнивается разница между перенесенным измеренным магнитным полем и предварительной оценкой по ММПЗ. Подобным же образом, если предварительная оценка по ММПЗ была перенесена в систему координат предварительной оценки по измеренному магнитному полю, то с заданным пороговым значением сравнивается разница между предварительной оценкой по ММПЗ и предварительной оценкой по измеренному магнитному полю. Если указанная разница не превышает заданное пороговое значение, то способ (500) обеспечивает возврат к стадии (502) для анализа последующих предварительных оценок. Если указанная разница превышает заданное пороговое значение, то на индикаторный блок поступает аварийный сигнал или предупреждение, указывающий на то, что решение по угловому пространственному положению является ложным, что происходит уже на стадии (514).
На стадии (516) опционально определяется, не превышает ли уровень чувствительности к ошибкам при определении углового пространственного положения заданное пороговое значение, как это было описано выше. Если уровень чувствительности к ошибкам при определении углового пространственного положения оказывается меньше заданного порогового значения, то осуществляется переход к стадии (518), где отображается информация о том, что разница между предварительной оценкой по измеренному магнитному полю и предварительной оценкой по ММПЗ непригодна для того, чтобы определить, является ли решение по угловому пространственному положению ложным. В некоторых вариантах осуществления настоящего изобретения аварийный сигнал на стадии (514) не передается, если указанная разница не пригодна для того, чтобы определить, не является ли решение по угловому пространственному положению ложным. В вариантах реализации заявленного изобретения, где пропущены стадии (516) и (518), аварийный сигнал подается на основании решения, принятого на стадии (512), как это описано выше.
Хотя в настоящем документе описаны и проиллюстрированы конкретные варианты осуществления настоящего изобретения, любому специалисту в данной области техники понятно, что проиллюстрированный конкретный вариант реализации заявленного изобретения может быть заменен любой иной схемой, рассчитанной для достижения той же цели. Таким образом, явным образом предполагается, что настоящее изобретение ограничено лишь пунктами формулы изобретения и их эквивалентами.
Примеры осуществления настоящего изобретения
Пример 1 включает в себя систему бортовой радиоэлектронной аппаратуры, включающей в себя: один или несколько источников данных об угловом пространственном положении, каждый из которых выполнен с возможностью генерирования соответствующего вычисленного решения по угловому пространственному положению; по меньшей мере, один магнитометр, выполненный с возможностью измерения магнитного поля в рамках системы бортовой радиоэлектронной аппаратуры; и, по меньшей мере, один прибор контроля углового пространственного положения, выполненный с возможностью использования соответствующего вычисленного решения по угловому пространственному положению, полученного, по меньшей мере, с одного или нескольких источников данных об угловом пространственном положении, для представления, по меньшей мере, одной предварительной оценки по измеренному магнитному полю или предварительной оценки по модели магнитного поля Земли так, чтобы эти оценки по измеренному магнитному полю и по модели магнитного поля Земли были в единой общей системе координат; при этом, по меньшей мере, один прибор контроля углового пространственного положения выполнен с дополнительной возможностью определения разницы между предварительной оценкой по измеренному магнитному полю и предварительной оценкой по модели магнитного поля Земли в единой общей системе координат; при этом, по меньшей мере, один прибор контроля углового пространственного положения выполнен с дополнительной возможностью выдачи аварийного сообщения о том, что соответствующее вычисленное решение по угловому пространственному положению, использованное для представления, по меньшей мере, или предварительной оценки по измеренному магнитному полю, или предварительной оценки по модели магнитного поля Земли, является ложным, если соответствующая разница между предварительной оценкой по измеренному магнитному полю и предварительной оценкой по модели магнитного поля Земли превышает заданное пороговое значение.
Пример 2 включает в себя систему бортовой радиоэлектронной аппаратуры по примеру 1, в которой, по меньшей мере, один прибор контроля углового пространственного положения может дополнительно определять, не превышает ли уровень чувствительности, по меньшей мере, одного такого прибора заданное пороговое значение; при этом, по меньшей мере, один прибор контроля углового пространственного положения выполнен с возможностью индикации того, что разница между предварительной оценкой по измеренному магнитному полю и предварительной оценкой по модели магнитного поля Земли является недостоверной, если уровень чувствительности указанного прибора при определении углового пространственного положения будет меньше заданного порогового значения.
Пример 3 включает в себя систему бортовой радиоэлектронной аппаратуры по примеру 2, в которой один или несколько источников данных представляют собой множество источников данных об угловом пространственном положении, каждый из которых выполнен с возможностью генерирования соответствующей предварительной оценки по измеренному магнитному полю; при этом, по меньшей мере, один прибор контроля углового пространственного положения может дополнительно определить, не превышает ли разница между предварительной оценкой по ММПЗ (модели магнитного поля Земли) и предварительной оценкой по измеренному магнитному полю, полученной с одного из множества указанных источников данных, заданного порогового значения более чем на величину разницы между предварительной оценкой по ММПЗ и предварительной оценкой по измеренному магнитному полю, полученной от других источников данных об угловом пространственном положении; и при этом, по меньшей мере, один прибор контроля углового пространственного положения выполнен с возможностью указания на то, что источник данных об угловом пространственном положении, по которому разница превышает заданное пороговое значение на величину, превышающую соответствующую разницу по другим источникам данным, вышел из строя.
Пример 4 включает в себя систему бортовой радиоэлектронной аппаратуры по любому из предшествующих примеров 1-8, в которой один или несколько источников данных представляют собой множество таких источников данных; при этом, по меньшей мере, один прибор контроля углового пространственного положения представляет собой множество таких приборов контроля, каждый из которых соответствует одному из источников данных об угловом пространственном положении из множества таких источников данных.
Пример 5 включает в себя систему бортовой радиоэлектронной аппаратуры по примеру 4, в которой каждый прибор контроля углового пространственного положения из указанного множества таких приборов является неотъемлемой частью соответствующего источника данных об угловом пространственном положении из указанного множества таких источников.
Пример 6 включает в себя систему бортовой радиоэлектронной аппаратуры по любому из предшествующих примеров 1-4, дополнительно содержащую датчик положения, выполненный с возможностью передачи данных о положении, по меньшей мере, на один прибор контроля углового пространственного положения, выполненный с возможностью генерирования предварительной оценки по модели магнитного поля Земли на основании - по меньшей мере, частично - полученных данных о положении.
Пример 7 включает в себя систему бортовой радиоэлектронной аппаратуры по примеру 6, в которой датчиком положения служит приемник глобальной навигационной спутниковой системы и инерциальная система отсчета.
Пример 8 включает в себя систему бортовой радиоэлектронной аппаратуры по любому из предшествующих примеров 1-7, в которой каждый источник данных об угловом пространственном положении из числа одного или нескольких таких источников представляет собой или блок воздушных сигналов и инерциальной системы (ADIRU), или опорный инерциальный блок (IRU), или блок определения курса и углового пространственного положения (AHRU).
Пример 9 включает в себя систему бортовой радиоэлектронной аппаратуры по любому из предшествующих примеров 1-8, в которой, по меньшей мере, один источник данных об угловом пространственном положении из числа одного или нескольких таких источников выполнен с возможностью передачи данных о положении, по меньшей мере, на один прибор контроля углового пространственного положения; при этом, по меньшей мере, один прибор контроля углового пространственного положения выполнен с возможностью генерирования предварительной оценки по модели магнитного поля Земли на основании - по меньшей мере, частично - полученных данных о положении.
Пример 10 включает в себя систему бортовой радиоэлектронной аппаратуры по любому из предшествующих примеров 1-9, в которой единой общей системой координат является или система координат бортовой радиоэлектронной аппаратуры, или эталонная система координат предварительного расчета по модели магнитного поля Земли.
Пример 11 включает в себя способ отслеживания ошибок при определении углового пространственного положения в системе бортовой радиоэлектронной аппаратуры, включающий в себя следующие стадии: получение решения по угловому пространственному положению; получение данных о географическом положении системы бортовой радиоэлектронной аппаратуры; получение предварительной оценки по измеренному магнитному полю в системе координат бортовой радиоэлектронной аппаратуры; вычисление предварительной оценки по модели магнитного поля Земли (ММПЗ) в эталонной системе координат на основании - по меньшей мере, частично - данных о географическом положении системы бортовой радиоэлектронной аппаратуры; преобразование, по меньшей мере, или предварительной оценки по измеренному магнитному полю, или предварительной оценки по модели магнитного поля Земли, исходя из решения по угловому пространственному положению, таким образом, чтобы предварительная оценка по измеренному магнитному полю и предварительная оценка по модели магнитного поля Земли находились в единой общей системе координат; определение того, не превышает ли разница между предварительной оценкой по измеренному полю Земли и предварительной оценкой по модели магнитного поля Земли в единой общей системе координат заданное пороговое значение; подача аварийного сигнала, указывающего на то, что решение по угловому пространственному положению имеет погрешность, если указанная разница превышает заданное пороговое значение.
Пример 12 включает в себя способ по примеру 11, в котором получение данных о географическом положении означает получение данных о географическом положении или с датчика положения, или от источника данных об угловом пространственном положении, генерирующего решение по угловому пространственному положению.
Пример 13 включает в себя способ по примеру 12, в котором получение данных о географическом положении с датчика положения означает получение данных о географическом положении с приемника глобальной навигационной спутниковой системы.
Пример 14 включает в себя способ по любому из предшествующих примеров 11-13, в котором единой общей системой координат является или система координат бортовой радиоэлектронной аппаратуры, или эталонная система координат предварительного расчета по модели магнитного поля Земли.
Пример 15 включает в себя способ по любому из предшествующих примеров 11-14, дополнительно включающий в себя определение того, не превышает ли уровень чувствительности к ошибкам при определении углового пространственного положения заданное пороговое значение; и индикацию того, что разница между предварительной оценкой по измеренному магнитному полю и предварительной оценкой по модели магнитного поля Земли не является достоверной, если уровень чувствительности к ошибкам при определении углового пространственного положения меньше заданного порогового значения.
Пример 16 включает в себя программный продукт, представляющий собой читаемый процессором носитель информации со встроенными программными командами; при этом указанные программные команды, при их исполнении, по меньшей мере, одним программируемым процессором, реализованы с возможностью инициирования выполнения следующих операций, по меньшей мере, одним программируемым процессором: приема предварительной оценки по измеренному магнитному полю в системе координат бортовой радиоэлектронной аппаратуры; вычисления предварительной оценки по модели магнитного поля Земли (ММПЗ) в эталонной системе координат на основании - по меньшей мере, частично - данных о географическом положении системы бортовой радиоэлектронной аппаратуры; преобразования, по меньшей мере, или полученной предварительной оценки по измеренному магнитному полю, или предварительной оценки по модели магнитного поля Земли на основании решения по угловому пространственному положению, полученного от источника данных об угловом пространственном положении, таким образом, чтобы предварительная оценка по измеренному магнитному полю и предварительная оценка по модели магнитного поля Земли оказались в единой общей системе координат; определение того, не превышает ли разница между предварительной оценкой по измеренному магнитному полю и предварительной оценкой по модели магнитного поля Земли в единой общей системе координат заданное пороговое значение; и выдачу аварийного сигнала, указывающего на то, что решение по угловому пространственному положению имеет погрешность, если указанная разница превышает заданное пороговое значение.
Пример 17 включает в себя программный продукт по примеру 16, в котором программные команды реализованы с дополнительной возможностью инициирования получения, по меньшей мере, одним программируемым процессором данных о географическом положении с датчика положения.
Пример 18 включает в себя программный продукт по любому из предшествующих примеров 16-17, в котором единая общая система координат системы бортовой радиоэлектронной аппаратуры представляет собой или систему координат бортовой радиоэлектронной аппаратуры, или эталонную систему координат ММПЗ; при этом программные команды реализованы с дополнительной возможностью инициирования преобразования, по меньшей мере, одним программируемым процессором предварительной оценки по измеренному магнитному полю в эталонную систему координат ММПЗ или преобразования предварительной оценки по ММПЗ в систему координат бортовой радиоэлектронной аппаратуры.
Пример 19 включает в себя программный продукт по любому из предшествующих примеров 16-18, в котором программные команды реализованы с дополнительной возможностью инициирования операции, выполняемой, по меньшей мере, одним программируемым процессором с тем, чтобы определить, не превышает ли уровень чувствительности к ошибкам при определении углового пространственного положения заданное пороговое значение.
Пример 20 включает в себя программный продукт по любому из предшествующих примеров 16-19, в котором программные команды реализованы с дополнительной возможностью инициирования следующих операций, выполняемых, по меньшей мере, одним программируемым процессором: определение того, не превышает ли уровень чувствительности к ошибкам при определении углового пространственного положения заданное пороговое значение; и индикацию того, что разница между предварительной оценкой по измеренному магнитному полю и предварительной оценкой по модели магнитного поля Земли не пригодна для того, чтобы определить, не является ли решение по угловому пространственному положению ложным, если уровень чувствительности к ошибкам при определении углового пространственного положения меньше заданного порогового значения.
Реферат
Изобретение относится к области навигационного приборостроения и может найти применение в системах бортовой радиоэлектронной аппаратуры. Технический результат – повышение точности. Для этого система содержит один или несколько источников данных об угловом пространственном положении, каждый из которых выполнен с возможностью генерирования соответствующего вычисленного решения по угловому пространственному положению; по меньшей мере, один магнитометр, выполненный с возможностью измерения магнитного поля; и, по меньшей мере, один прибор контроля углового пространственного положения, выполненный с возможностью использования соответствующего вычисленного решения по угловому пространственному положению, полученного с одного или нескольких источников данных об угловом пространственном положении, для представления предварительной оценки по измеренному магнитному полю или предварительной оценки по модели магнитного поля Земли (ММПЗ) так, чтобы эти оценки по измеренному магнитному полю и ММПЗ были в единой общей системе координат. По меньшей мере, один прибор контроля углового пространственного положения выполнен с дополнительной возможностью определения разницы между предварительной оценкой по измеренному магнитному полю и предварительной оценкой по ММПЗ в единой общей системе координат. По меньшей мере, один прибор контроля углового пространственного положения выполнен с дополнительной возможностью выдачи аварийного сообщения о том, что соответствующее вычисленное решение по угловому пространственному положению, использованное для представления предварительной оценки по измеренному магнитному полю или предварительной оценки по ММПЗ, является ложным, если разница между ними превышает заданное пороговое значение. 3 н. и 17 з.п. ф-лы, 5 ил.
Комментарии