Роботизированное устройство для измерения комплексно-механизированного очистного забоя и автоматическая измерительная система - RU2783644C1
Код документа: RU2783644C1
Чертежи


Описание
Область техники
Данное изобретение относится к сфере интеллектуальной разработки угольных залежей, а именно к роботизированным устройствам для измерения комплексно-механизированного очистного забоя и автоматической измерительной системе.
Предыдущий уровень техники
По мере повышения уровня интеллектуализации оснащения рудников государство наращивает меры по стимулированию работ с минимальным участием или без участия людей на опасных рабочих участках подземных комплексно-механизированных очистных забоев. Чем меньше людей участвует в производстве работ в комплексно-механизированном очистном забое шахты, тем более безопасной становится вся рабочая среда в целом, т.е. необходимо обеспечить прозрачность очистного забоя. В свою очередь, прозрачность так называемого комплексно-механизированного очистного забоя базируется на создании единой пространственной системы координат очистного забоя.
Разработка комплексно-механизированного очистного забоя представляет собой процесс динамического продвижения. Исходя из этого, в процессе динамического продвижения в очистном забое основополагающими факторами являются развертывание сети управления шахтным очистным забоем и быстрое автоматическое развертывание пространственных связей внутри высокоточной единой системы координат комплексно-механизированного очистного забоя. Неблагоприятные условия подземной среды в шахтах обуславливают ограниченность пространства, наличие мощных магнитных полей и других сложностей, которые не имеют эффективных путей решения; используемые на поверхности земли системы GPS и позиционирования системы Бэйдоу здесь также не эффективны. На сегодняшний день в сфере средств измерения комплексно-механизированных очистных забоев существуют следующие проблемы:
(1) Периодическое измерение целевых точек традиционным проводным методом (например, один раз в неделю или через каждые полмесяца, проведение измерений в период осмотра и ремонта). Периодическое продвижение поверхности очистного забоя приводит к разрушению всей системы пространственных связей, отсутствует возможность в удовлетворении запросов интеллектуального позиционирования комплексно-механизированного очистного забоя в режиме реального времени.
(2) Метод измерения целевых точек комплексно-механизированного очистного забоя шахты с применением гироскопического тахеометра можно основываться на динамическом создании единой пространственной системы координат. Однако, для применения этого метода необходимо, чтобы и главные управляющие измерительные роботы, и обычные измерительные роботы были оснащены гироскопическими тахеометрами, но в рамках данной заявки гироскопический тахеометр используется только на главных управляющих измерительных роботах в случае, когда в штреке доступна для видимости только одна контрольная точка, при этом остальные обычные измерительные роботы используют тахеометры без гироскопа непрерывной ориентации на север. Причиной этому является то, что временная продолжительность поиска севера гироскопическим тахеометром становится больше каждый раз после продвижения очистного забоя (чем выше точность ориентации гироскопа на север, тем больше временные затраты). К тому же, гироскопические тахеометры имеют высокую стоимость и низкую приспособляемость к неблагоприятной эксплуатационной среде (высокие температуры, высокая влажность, высокая вибрация).
(3) Опираясь на метод обратной засечки расстояния до целевых точек комплексно-механизированного очистного забоя шахты, имеется возможность динамического создания единой пространственной системы координат. Однако, за исключением головного и хвостового главных управляющих тахеометров, геодезические координаты которых можно рассчитать методом обратной засечки расстояния, рассчитать координаты промежуточных тахеометров с применением данного метода практически невозможно, так как их точки стояния и пары контрольных точек обратной засечки расстояния располагаются практически на одной линии, а угол в высшей точке, которой является точка стояния тахеометра, практически равен нулю, что приводит к созданию большой погрешности при расчете координат.
Из уровня техники известен источник информации CN201610095277.6, E21F17/18, опубликованной 16.11.2016, который предлагает систему забойного оборудования, которое обеспечивает точное определение местоположения оборудования и персонала во время добычи угля. Система состоит из гидравлической опоры, машины для добычи угля, точки привязки и сервера для определения местоположения угледобывающей машины, направления её движения и скорости.
Источник информации CN 201610095277 .6 не решает указанную выше техническую проблему, поскольку только помогает избежать отключения и уменьшить износ угледобывающей машины, кроме этого система не обеспечивает прозрачность очистного забоя, которая базируется на создании единой пространственной системы координат очистного забоя.
Сущность изобретения
Учитывая вышеперечисленные проблемы, представлены роботизированное устройство для измерения комплексно-механизированного очистного забоя и автоматическая измерительная система, которые представляют собой измерительных роботов, состоящих из подвесной клетки, тахеометра, призмы и промышленного персонального компьютера. Посредством замены гироскопического тахеометра измерительным роботом устраняются недостатки, связанные с большой продолжительностью определения направления севера гироскопическим тахеометром, его высокой стоимостью и плохой приспособляемостью к неблагоприятным условиям среды.
Основываясь на одном из аспектов данного изобретения, оно представляет собой роботизированное устройство для измерения комплексно-механизированного очистного забоя, состав конструкции измерительного робота включает в себя подвесную клетку, тахеометр, призму и промышленный персональный компьютер, в том числе:
Подвесная клетка устанавливается на вершинную балку механизированной крепи комплексно-механизированного очистного забоя шахты и используется для крепления тахеометра, промышленного персонального компьютера и призмы; подвесная клетка имеет функцию автоматического выравнивания, которая гарантирует сохранение горизонтального положения располагающегося внутри камеры клетки тахеометра; подвесная клетка представляет собой водонепроницаемое, пылезащищенное и взрывозащищенное герметичное пространство, при этом в соответствии с приближенными к линейным характеристиками передней и задней перспективы измерений очистного забоя спереди и сзади упомянутой подвесной клетки имеются прозрачные смотровые окна, обеспечивающие возможность проведения тахеометром соответствующих измерений;
Тахеометр представляет собой универсальную измерительную платформу, объединяющую в себе функции автоматического опознавания цели, автоматического утверждения цели, автоматического измерения углов, автоматического сопровождения целей, автоматических вычислений и автоматического сохранения данных; тахеометр крепится в центре камеры подвесной клетки;
Призма представляет собой оптическое устройство обработки целей, измеряемых тахеометром, которая включает в себя простую оптическую призму и призму 360°; призма устанавливается в нижней части подвесной клетки так, что вертикальная осевая линия призмы и центрирующая ось тахеометра располагаются на общей отвесной линии; геодезические координаты X и Y призмы совпадают с координатами X и Y точки стояния тахеометра;
Промышленный персональный компьютер представляет собой промышленный компьютер, который устанавливается внутри подвесной клетки; на промышленном персональном компьютере развернута программа автоматического управления измерительным роботизированным устройством, которая используется для управления измерительным роботизированным устройством, на котором установлен промышленный персональный компьютер, а также для диспетчеризации совместной работы нескольких измерительных роботов;
В зависимости от монтажного положения и конкретного назначения измерительные роботы делятся на главных управляющих измерительных роботов и обычных измерительных роботов; главный управляющий измерительный робот оснащен тахеометром, который представляет собой обычный тахеометр или гироскопический тахеометр с гироскопом непрерывной ориентации на север; обычный измерительный робот оснащен тахеометром, который является обычным тахеометром без гироскопа;
Каждый обычный измерительный робот, оснащенный обычным тахеометром, осуществляет пространственную ориентацию с помощью призмы наблюдаемого им сзади измерительного робота с уже известными координатами точки стояния, наблюдает за призмой расположенного впереди измерительного робота с неизвестными координатами точки стояния и посредством измерения угла падения и наклонной дальности получает координаты точки стояния наблюдаемого впереди упомянутого измерительного робота.
Опционально, главный управляющий измерительный робот может представлять собой измерительный робот, установленный и закрепленный на вершинной балке механизированной крепи в начале или конце комплексно-механизированного очистного забоя шахты; обычный измерительный робот может представлять собой измерительный робот, установленный и закрепленный на промежуточных вершинных балках механизированной крепи в комплексно-механизированном очистном забое шахты.
Опционально, способ определения координат точки стояния упомянутого главного управляющего измерительного робота может включать в себя следующее:
(1) Главный управляющий измерительный робот позади себя наблюдает за призмами двух контрольных точек на боковых стенах выработки и контролирует наклонную дальность и угол падения точки стояния главного управляющего измерительного робота относительно двух контрольных точек на боковых стенах выработки, за счет чего методом обратной засечки расстояния по двум точкам рассчитываются координаты точки стояния главного управляющего измерительного робота;
(2) Тахеометр, расположенный на главном управляющем измерительном роботе, представляет собой гироскопический тахеометр, который имеет функцию поиска севера; гироскопический тахеометр выполняет автоматический поиск севера, определяет положение точки стояния главного управляющего измерительного робота относительно призмы одной из контрольных точек на боковых стенках выработки и с помощью измеренных тахеометром угла падения и наклонной дальности относительно контрольной точки рассчитывает координаты точки стояния главного управляющего измерительного робота.
Опционально, для определения координат точки стояния обычного измерительного робота может использоваться метод расчета линии ответвления.
Основываясь на другом аспекте данной заявки, представлена автоматизированная измерительная система, которая включает в себя представленного в первом аспекте данной заявки роботов для измерений комплексно-механизированного очистного забоя, в число упомянутых измерительных роботов входят главные управляющие измерительные роботы, в том числе компоновка оборудования автоматической измерительной системы включает в себя:
Призмы контрольных точек, располагающиеся на стенках выработки односторонних штреков в начале или конце комплексно-механизированного очистного забоя шахты, геодезические координаты упомянутых контрольных точек призм определяются заблаговременно; контрольные точки используются в качестве контрольных точек, обозреваемых сзади главным управляющим измерительным роботом;
Главный управляющий измерительный робот устанавливается и крепится на вершинной балке механизированной крепи в начале или конце комплексно-механизированного очистного забоя шахты;
В соответствии с подъемом и опусканием комплексно-механизированного очистного забоя шахты на вершинных балках механизированной крепи комплексно-механизированного очистного забоя обычные измерительные роботы устанавливаются и крепятся так, чтобы обеспечить взаимную видимость между двумя соседними измерительными роботами, включая главных управляющих измерительных роботов, за счет чего реализуется полное покрытие всего очистного забоя сетью наблюдения и контроля.
Опционально, технологический процесс работы автоматической измерительной системы может включать в себя следующее:
(1) Запуск автоматической измерительной системы в работу;
(2) Расчет и получение координат точек положения главных управляющих измерительных роботов с помощью контрольных точек на стенках выработки, наблюдение за расположенной впереди призмой соседнего измерительного робота для получения координат точки его положения; одновременно с этим выполняется измерение геодезических координат стационарных и подвижных целей;
(3) Каждый обычный измерительный робот осуществляет пространственную ориентацию с помощью призмы наблюдаемого им сзади измерительного робота с уже известными координатами точки стояния, наблюдает за призмой расположенного впереди измерительного робота с неизвестными координатами точки стояния и посредством измерения угла падения и наклонной дальности получает координаты точки стояния этого наблюдаемого впереди измерительного робота; одновременно с этим выполняется измерение геодезических координат стационарных и подвижных целей;
(4) Посредством такого метода реализуется измерение геодезических координат стационарных и подвижных целей в границах всего комплексного механизированного очистного забоя шахты;
(5) Остановка работы системы после завершения измерения геодезических координат стационарных и подвижных целей в границах всего комплексного механизированного очистного забоя шахты.
Технический результат
Роботизированное устройство для измерения комплексно-механизированного очистного забоя, в том числе состав конструкции измерительного робота включает в себя подвесную клетку, тахеометр, призму и промышленный персональный компьютер. Подвесная клетка, имеющая функцию автоматического выравнивания, подвешивается и закрепляется на вершинной балке гидравлической крепи, затем в подвесную клетку устанавливается тахеометр и промышленный персональный компьютер; в завершении оснащенная соответствующим разъемом призма соединяется с основанием тахеометра; в результате образуется измерительное роботизированное устройство. В соответствии с подъемом и опусканием комплексно-механизированного очистного забоя шахты вдоль поверхности очистного забоя последовательно располагается несколько измерительных роботов так, что соседние измерительные роботы находятся в поле зрения друг друга. Когда в штреке доступна для видимости только одна контрольная точка, необходимо, чтобы гироскопический тахеометр был установлен только на одном главном управляющем измерительном роботе, остальные обычные измерительные роботы могут использовать тахеометр без гироскопа непрерывной ориентации на север. Каждый обычный измерительный робот осуществляет пространственную ориентацию с помощью призмы наблюдаемого им сзади измерительного робота с уже известными координатами точки стояния, наблюдает за призмой расположенного впереди измерительного робота с неизвестными координатами точки стояния и посредством измерения угла падения и наклонной дальности получает координаты точки стояния этого наблюдаемого впереди измерительного робота; одновременно с этим выполняется измерение геодезических координат стационарных и подвижных целей.
Иными словами, когда в штреке комплексно-механизированного очистного забоя доступна для видимости только одна контрольная точка, достаточно, чтобы гироскопический тахеометр был установлен только на одном главном управляющем измерительном роботе, остальные обычные измерительные роботы могут использовать обычные тахеометры. Когда в штреке доступны для видимости не менее двух контрольных точек, то все измерительные роботы могут использовать обычные тахеометры, чтобы производить измерения геодезических координат стационарных и подвижных целей в границах всего комплексно-механизированного очистного забоя, поскольку использующим обычный тахеометр измерительным роботам необходимо всего лишь несколько секунд, чтобы измерить геодезические координаты стационарных и подвижных целей, и применение таких роботизированных устройств позволяет не только экономить затраты, но и значительно сократить время измерений и устранить недостатки, связанные с большой продолжительностью определения направления севера гироскопическим тахеометром, его высокой стоимостью и плохой приспособляемостью к неблагоприятным условиям среды.
Описание чертежей
Нижеприведенное детальное описание наиболее наглядных примеров реализации изобретения поможет рядовому техническому персоналу данной сферы более четко понять иные различные преимущества и полезные эффекты данного изобретения. Прилагаемые изображения представлены исключительно с целью демонстрации наиболее наглядных примеров реализации данного изобретения и не накладывают каких-либо ограничений на данное изобретение. Во всех прилагаемых изображениях используется набор справочных условных обозначений для обозначения одних и тех же деталей. Прилагаемые изображения включают в себя:
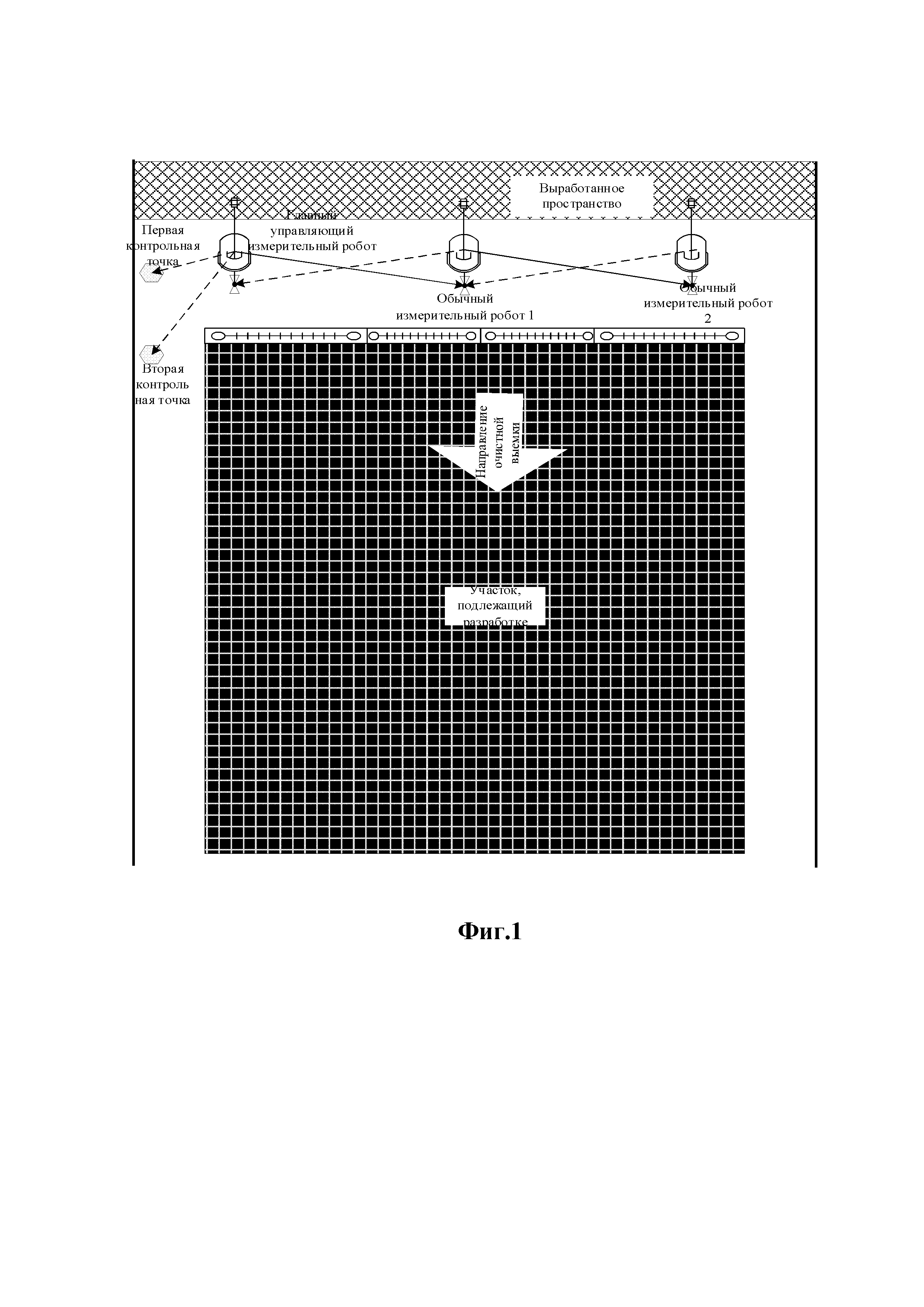
На Фиг. 1 представлена схема компоновки оборудования автоматической измерительной системы комплексно-механизированного очистного забоя по примеру реализации 1 данного изобретения;
На Фиг. 2 представлена схема конструкции роботизированного устройства для измерения комплексно-механизированного очистного забоя по примеру реализации 1 данного изобретения;
На Фиг. 3 представлена схема рабочего технологического процесса автоматической измерительной системы комплексно-механизированного очистного забоя по примеру реализации 1 данного изобретения;
Конкретные варианты осуществления изобретения
Ниже согласно прилагаемым изображениям представлено более подробное описание показательных вариантов реализации данного изобретения. Хотя показательные варианты реализации данного изобретения показаны на чертежах, следует понимать, что данное изобретение может быть реализовано в различных формах и не ограничивается изложенными здесь примерами реализации. Наоборот, данные примеры реализации представлены для более полного понимания и обеспечения возможности в полной мере передать техническому персоналу данной области сферу данного изобретения.
Принимая во внимание применение связанных технологий, после продвижения комплексно-механизированного очистного забоя гироскопическому тахеометру каждый раз требуется довольно продолжительное время для поиска севера (и чем выше точность ориентации гироскопа на север, тем больше временные затраты). К тому же, гироскопические тахеометры имеют высокую стоимость и низкую приспособляемость к неблагоприятной эксплуатационной среде (высокие температуры, высокая влажность, вибрация), что еще более четко выявляет несовершенство предшествующего уровня техники и обуславливает запрос на изыскание решений по его модернизации и доработке. Вместе с тем, в процессе модернизации возникают две следующих проблемы:
Во-первых, опираясь на метод обратной засечки расстояния до целевых точек комплексно-механизированного очистного забоя шахты, имеется возможность динамического создания единой пространственной системы координат. Однако, за исключением головного и хвостового главных управляющих тахеометров, геодезические координаты которых можно рассчитать методом обратной засечки расстояния, рассчитать координаты промежуточных тахеометров данным методом практически невозможно, так как их точки стояния и пары контрольных точек обратной засечки расстояния располагаются практически на одной линии, а угол в высшей точке, которой является точка стояния тахеометра, практически равен нулю, что приводит к созданию большой погрешности при расчете координат. Кроме того, производство подземных работ сопровождается сложными условиями среды, а комплексно-механизированный очистной забой находится в процессе динамического продвижения, поэтому повышение точности расчета координат является относительно сложной перманентной проблемой профессиональной сферы.
Во-вторых, большая продолжительность определения направления севера гироскопическим тахеометром, его высокая стоимость и низкая приспособляемость к неблагоприятной эксплуатационной среде. В это же время в области подземных работ необходимо не только снижать себестоимость оборудования, но и повышать точность измерений, чтобы на более высоком уровне обеспечивать безопасность работ, что является крайне сложной задачей.
Исходя из вышеперечисленных проблем, в ходе многочисленных испытаний и сопоставительных исследований была обновлена база контрольно-измерительного оборудования и усовершенствованы методы расчета координат, в результате чего представлен следующий технический замысел:
Осуществление пространственной ориентации посредством использования обычного тахеометра без гироскопа вместо гироскопического тахеометра с помощью призмы наблюдаемого сзади измерительного робота с уже известными координатами точки стояния, определение направления истинного севера, наблюдение за призмой расположенного впереди упомянутого измерительного робота с неизвестными координатами точки стояния и посредством измерения угла падения и наклонной дальности получение координаты точки стояния этого наблюдаемого впереди упомянутого измерительного робота.
В данном примере реализации изобретение представляет роботизированное устройство для измерения комплексно-механизированного очистного забоя, в том числе состав конструкции измерительного роботизированного устройства включает в себя подвесную клетку, тахеометр, призму и промышленный персональный компьютер. Подвесная клетка, имеющая функцию автоматического выравнивания, подвешивается и закрепляется на вершинной балке гидравлической крепи, затем в подвесную клетку устанавливается тахеометр и промышленный персональный компьютер; в завершении оснащенная соответствующим разъемом призма соединяется с основанием тахеометра; в результате образуется измерительное роботизированное устройство. В соответствии с подъемом и опусканием комплексно-механизированного очистного забоя шахты вдоль поверхности очистного забоя последовательно располагается несколько измерительных роботов так, что соседние измерительные роботы находятся в поле зрения друг друга. Когда в штреке доступна для видимости только одна контрольная точка, необходимо, чтобы гироскопический тахеометр был установлен только на одном главном управляющем измерительном роботе, остальные обычные измерительные роботы могут использовать тахеометр без гироскопа непрерывной ориентации на север. Каждый обычный измерительный робот осуществляет пространственную ориентацию с помощью призмы наблюдаемого им сзади измерительного робота с уже известными координатами точки стояния, наблюдает за призмой расположенного впереди измерительного робота с неизвестными координатами точки стояния и посредством измерения угла падения и наклонной дальности получает координаты точки стояния этого наблюдаемого впереди измерительного робота; одновременно с этим выполняется измерение геодезических координат стационарных и подвижных целей. Иными словам, когда в штреке комплексно-механизированного очистного забоя доступна для видимости только одна контрольная точка, достаточно, чтобы гироскопический тахеометр был установлен только на одном главном управляющем измерительном роботе, остальные обычные измерительные роботы могут использовать обычные тахеометры. Когда в штреке доступны для видимости не менее двух контрольных точек, то все измерительные роботы могут использовать обычные тахеометры, чтобы производить измерения геодезических координат стационарных и подвижных целей в границах всего комплексно-механизированного очистного забоя, а использующим обычный тахеометр измерительным роботам необходимо всего лишь несколько секунд, чтобы измерить геодезические координаты стационарных и подвижных целей, в то время как гироскопическому тахеометру каждый раз для определения направления требуется 15 минут. Таким образом, применение таких роботизированных устройств позволяет не только экономить затраты, но и значительно сократить время измерений и устранить недостатки, связанные с большой продолжительностью определения направления севера гироскопическим тахеометром, его высокой стоимостью и плохой приспособляемостью к неблагоприятным условиям среды.
Пример реализации 1
На Фиг. 2 представлена схема конструкции роботизированного устройства для измерения комплексно-механизированного очистного забоя по данной заявке. Как показано на Фиг. 2, роботизированное устройство для измерения комплексно-механизированного очистного забоя, состав конструкции измерительного робота включает в себя подвесную клетку, тахеометр, призму и промышленный персональный компьютер, в том числе:
Подвесная клетка устанавливается на вершинную балку механизированной крепи комплексно-механизированного очистного забоя шахты и используется для крепления тахеометра, промышленного персонального компьютера и призмы;
Подвесная клетка имеет функцию автоматического выравнивания, которая гарантирует сохранение горизонтального положения располагающегося внутри камеры клетки тахеометра;
Подвесная клетка представляет собой водонепроницаемое, пылезащищенное и взрывозащищенное герметичное пространство, при этом в соответствии с приближенными к линейным характеристиками передней и задней перспективы измерений очистного забоя спереди и сзади упомянутой подвесной клетки имеются прозрачные смотровые окна, обеспечивающие возможность проведения тахеометром соответствующих измерений;
Тахеометр представляет собой универсальную измерительную платформу, объединяющую в себе функции автоматического опознавания цели, автоматического утверждения цели, автоматического измерения углов, автоматического сопровождения целей, автоматических вычислений и автоматического сохранения данных; тахеометр крепится в центре камеры подвесной клетки;
Призма представляет собой оптическое устройство обработки целей, измеряемых тахеометром, которая включает в себя простую оптическую призму и призму 360°; призма устанавливается в нижней части подвесной клетки так, что вертикальная осевая линия призмы и центрирующая ось тахеометра располагаются на общей отвесной линии; геодезические координаты X и Y призмы совпадают с координатами X и Y точки стояния тахеометра;
Промышленный персональный компьютер представляет собой промышленный компьютер, который устанавливается внутри подвесной клетки; на промышленном персональном компьютере развернута программа автоматического управления измерительным роботизированным устройством, которая используется для управления измерительным роботизированным устройством, на котором установлен промышленный персональный компьютер, а также для диспетчеризации совместной работы нескольких измерительных роботов;
В зависимости от монтажного положения и конкретного назначения измерительные роботы делятся на главных управляющих измерительных роботов и обычных измерительных роботов; главный управляющий измерительный робот оснащен тахеометром, который представляет собой обычный тахеометр или гироскопический тахеометр с гироскопом непрерывной ориентации на север; обычный измерительный робот оснащен тахеометром, который является обычным тахеометром без гироскопа;
Каждый обычный измерительный робот, оснащенный обычным тахеометром, осуществляет пространственную ориентацию с помощью призмы наблюдаемого им сзади измерительного робота с уже известными координатами точки стояния, наблюдает за призмой расположенного впереди измерительного робота с неизвестными координатами точки стояния и посредством измерения угла падения и наклонной дальности получает координаты точки стояния наблюдаемого впереди упомянутого измерительного робота.
По примеру реализации данного изобретения состав конструкции измерительного робота включает в себя подвесную клетку, тахеометр, призму и промышленный персональный компьютер. Подвесная клетка, имеющая функцию автоматического выравнивания, подвешивается и закрепляется на вершинной балке гидравлической крепи, затем в подвесную клетку устанавливается тахеометр и промышленный персональный компьютер; в завершении оснащенная соответствующим разъемом призма соединяется с основанием тахеометра; в результате образуется измерительное роботизированное устройство. В соответствии с подъемом и опусканием комплексно-механизированного очистного забоя шахты вдоль поверхности очистного забоя последовательно располагается несколько измерительных роботов так, что соседние измерительные роботы находятся в поле зрения друг друга. Когда в штреке доступна для видимости только одна контрольная точка, необходимо, чтобы гироскопический тахеометр был установлен только на одном из нескольких измерительных роботов (этот измерительный робот может представлять собой главный управляющий измерительный робот), остальные обычные измерительные роботы могут использовать тахеометр без гироскопа непрерывной ориентации на север. Каждый обычный измерительный робот осуществляет пространственную ориентацию с помощью призмы наблюдаемого им сзади измерительного робота с уже известными координатами точки стояния, наблюдает за призмой расположенного впереди измерительного робота с неизвестными координатами точки стояния и посредством измерения угла падения и наклонной дальности получает координаты точки стояния этого наблюдаемого впереди измерительного робота; одновременно с этим выполняется измерение геодезических координат стационарных и подвижных целей.
Иными словами, когда в штреке комплексно-механизированного очистного забоя доступна для видимости только одна контрольная точка, достаточно, чтобы гироскопический тахеометр был установлен только на одном главном управляющем измерительном роботе, остальные обычные измерительные роботы могут использовать обычные тахеометры. Когда в штреке доступны для видимости не менее двух контрольных точек, то все измерительные роботы могут использовать обычные тахеометры, чтобы производить измерения геодезических координат стационарных и подвижных целей в границах всего комплексно-механизированного очистного забоя. Использующим обычный тахеометр измерительным роботам необходимо несколько секунд, чтобы измерить геодезические координаты стационарных и подвижных целей, в то время как гироскопическому тахеометру каждый раз для определения направления требуется 15 минут. Применение таких роботизированных устройств позволяет не только экономить затраты, но и значительно сократить время измерений и устранить недостатки, связанные с большой продолжительностью определения направления севера гироскопическим тахеометром, его высокой стоимостью и плохой приспособляемостью к неблагоприятным условиям среды.
Основываясь на упомянутом роботизированном устройстве для измерения комплексно-механизированного очистного забоя, данное изобретение представляет несколько нижеперечисленных конкретных примеров реализации. Исходя из предпосылок отсутствие взаимных противоречий, любая комбинация представленных примеров реализации может привести к созданию нового роботизированного устройства для измерения комплексно-механизированного очистного забоя. Следует понимать, что любое новое роботизированное устройство для измерения комплексно-механизированного очистного забоя, созданное посредством любой комбинации примеров реализации данного изобретения, попадает в область защиты данного изобретения.
По примеру реализации данного изобретения главный управляющий измерительный робот может представлять собой измерительный робот, установленный и закрепленный на вершинной балке механизированной крепи в начале или конце комплексно-механизированного очистного забоя шахты; обычный измерительный робот может представлять собой измерительный робот, установленный и закрепленный на промежуточных вершинных балках механизированной крепи в комплексно-механизированном очистном забое шахты.
Главный управляющий измерительный робот используется для управления согласованной работой всех измерительных роботов. Посредством такой согласованной работы выполняются измерения геодезических координат стационарных и подвижных целей в границах всего комплексно-механизированного очистного забоя и устраняются недостатки, связанные с разрушением всей системы пространственных связей вследствие периодического продвижения поверхности очистного забоя и отсутствием возможности в удовлетворении запросов интеллектуального позиционирования комплексно-механизированного очистного забоя в режиме реального времени.
В данном примере реализации определение координат точки стояния упомянутого главного управляющего измерительного робота определяется двумя следующими методами:
(1) Главный управляющий измерительный робот позади себя наблюдает за призмами двух контрольных точек на боковых стенах выработки и контролирует наклонную дальность и угол падения точки стояния главного управляющего измерительного робота относительно двух контрольных точек на боковых стенах выработки, за счет чего методом обратной засечки расстояния по двум точкам рассчитываются координаты точки стояния главного управляющего измерительного робота. Таким образом, в качестве главного управляющего измерительного робота может использоваться измерительный робот без гироскопического тахеометра. Это позволяет не только экономить затраты, но и значительно сократить время измерений и устранить недостатки, связанные с большой продолжительностью определения направления севера гироскопическим тахеометром, его высокой стоимостью и плохой приспособляемостью к неблагоприятным условиям среды.
(2) Тахеометр, расположенный на главном управляющем измерительном роботе, представляет собой гироскопический тахеометр, который имеет функцию поиска севера; гироскопический тахеометр выполняет автоматический поиск севера, определяет положение точки стояния главного управляющего измерительного робота относительно призмы одной из контрольных точек на боковых стенках выработки и с помощью измеренных тахеометром угла падения и наклонной дальности относительно контрольной точки рассчитывает координаты точки стояния главного управляющего измерительного робота. Подземная среда в рудниках характеризуется сложными условиями и ограниченным пространством. Когда в шахте доступна для видимости только одна контрольная точка, рассчитать координаты точки стояния главного управляющего измерительного робота с помощью метода обратной засечки по двум точкам невозможно. Поэтому необходимо, чтобы на главном управляющем измерительном роботе использовался гироскопический тахеометр. Гироскопический тахеометр автоматически находит север и определяет направление от точки стояния главного управляющего измерительного робота на контрольную точку и посредством метода обратной засечки по одной точке рассчитывает координаты точки стояния главного управляющего измерительного робота. Применение такого набора оборудования позволяет устранить проблемы, связанные с невозможностью расчета координат точки стояния главного управляющего измерительного робота методом обратной засечки расстояния по двум точкам, когда в шахте доступна для видимости только одна контрольная точка.
В данном примере реализации для определения координат точки стояния обычного измерительного робота может использоваться метод расчета линии ответвления. Метод расчета линии ответвления устраняет недостатки, связанные с невозможностью применения метода обратной засечки расстояния для расчета геодезических координат, так как точки стояния промежуточных тахеометров и пары контрольных точек обратной засечки расстояния располагаются практически на одной линии, а угол в высшей точке, которой является точка стояния тахеометра, практически равен нулю, что приводит к созданию большой погрешности при расчете координат.
Пример реализации 2
На Фиг. 1 представлена схема компоновки оборудования автоматической измерительной системы комплексно-механизированного очистного забоя по данной заявке. Как показано на Фиг. 1, автоматизированная измерительная система включает в себя представленное примером реализации 1 данной заявки измерительное роботизированное устройство, в том числе:
Призмы контрольных точек, располагающиеся на стенках выработки в том же направлении, что и начало или конец комплексно-механизированного очистного забоя шахты; на Фиг. 1 с двух сторон черной рамкой обозначены стены выработки. Геодезические координаты упомянутых контрольных точек призм определяются заблаговременно; контрольные точки используются в качестве контрольных точек, обозреваемых сзади главным управляющим измерительным роботом;
Главный управляющий измерительный робот устанавливается и крепится на вершинной балке механизированной крепи в начале или конце комплексно-механизированного очистного забоя шахты;
В соответствии с подъемом и опусканием комплексно-механизированного очистного забоя на вершинных балках механизированной крепи комплексно-механизированного очистного забоя измерительные роботы устанавливаются и крепятся так, чтобы обеспечить взаимную видимость между двумя соседними измерительными роботами, включая главных управляющих измерительных роботов, за счет чего реализуется полное покрытие всего очистного забоя сетью наблюдения и контроля.
По примеру реализации данного изобретения в соответствии с подъемом и опусканием комплексно-механизированного очистного забоя шахты вдоль поверхности очистного забоя последовательно располагается несколько измерительных роботов так, что соседние измерительные роботы находятся в поле зрения друг друга; в результате формируется автоматическая измерительная система комплексно-механизированного очистного забоя, покрывающая область шахты. С помощью упомянутого роботизированного устройства измерения комплексно-механизированного очистного забоя и автоматической измерительной системы проводятся измерения геодезических координат стационарных и подвижных целей очистного забоя шахты.
По примеру реализации данного изобретения на Фиг. 3 представлена схема рабочего технологического процесса автоматической измерительной системы комплексно-механизированного очистного забоя по данной заявке. Как показано на Фиг. 3, рабочий технологический процесс автоматической измерительной системы включает в себя следующее:
(1) Запуск автоматической измерительной системы в работу.
(2) Расчет и получение координат точек положения главных управляющих измерительных роботов с помощью контрольных точек на стенках выработки, наблюдение за расположенной впереди призмой соседнего измерительного робота для получения координат точки его положения; одновременно с этим выполняется измерение геодезических координат стационарных и подвижных целей.
(3) Каждый обычный измерительный робот осуществляет пространственную ориентацию с помощью призмы наблюдаемого им сзади измерительного робота с уже известными координатами точки стояния, наблюдает за призмой расположенного впереди измерительного робота с неизвестными координатами точки стояния и посредством измерения угла падения и наклонной дальности получает координаты точки стояния этого наблюдаемого впереди измерительного робота; одновременно с этим выполняется измерение геодезических координат стационарных и подвижных целей.
(4) На Фиг. 3 многоточие означает повторение шага (3) каждым обычным измерительным роботом. Путем многократного повтора шагов (1)-(3) реализуется измерение геодезических координат стационарных и подвижных целей в границах всего комплексного механизированного очистного забоя шахты.
(5) Остановка работы системы после завершения измерения геодезических координат стационарных и подвижных целей в границах всего комплексного механизированного очистного забоя шахты.
Следует понимать, что, в данном описании изобретения представлено описание лишь наиболее наглядных примеров реализации из числа примеров реализации данного изобретения. Тем не менее, технический персонал данной сферы, поняв базовую изобретательскую концепцию, может вносить иные изменения и модификации в указанные примеры реализации. Поэтому интерпретация прилагаемой формулы изобретения должна включать все показательные примеры реализации данного изобретения, а также все изменения и модификации, которые входят в сферу примеров реализации данного изобретения.
В завершении необходимо отметить, что связующие термины типа «первый» или «второй» используются в данном документе исключительно для того, чтобы отделить какой-либо объект или операцию от другого объекта или операции, а не для того, чтобы явно или скрыто назначать для этих объектов или операций какие-либо связи или последовательности. Кроме этого, термины «включает в себя», «содержит» и любые другие их варианты используются здесь для описания охвата неисключительного содержания, поэтому следует понимать, что процессы, способы, предметы или конечные устройства, включающие в себя ряд составляющих элементов, не ограничиваются содержанием лишь перечисленных элементов, но также включают в себя и иные не указанные в перечислении элементы, либо включают в себя элементы, внутренне присущие этим процессам, методам, предметам или конечным устройствам. При отсутствии каких-либо дополнительных ограничений элемент, определяемый фразой «включая …», не исключает существования других идентичных элементов в процессе, методе, предмете или конечном устройстве упомянутых элементов, которые включают этот элемент.
Выше приведено детальное описание представленного в данном изобретении роботизированного устройства для измерения комплексно-механизированного очистного забоя и автоматической измерительной системы. Для описания принципов данного изобретения и способов его реализации в данном документе приведено несколько отдельных конкретных примеров, которые представлены исключительно для того, чтобы сделать более понятным метод и основную идею данного изобретения. Одновременно с этим, говоря в целом, содержание данного описания не должно восприниматься в виде какого-либо ограничения для рядового технического персонала данной сферы, который, основываясь на идее данного изобретения, может в пределах конкретных примеров реализации и области применения данного изобретения вносить какие-либо изменения или модификации.
Реферат
Группа изобретений относится к сфере интеллектуальной разработки угольных залежей. Роботизированное устройство для измерения комплексно-механизированного очистного забоя включает в себя подвесную клетку, тахеометр, призму и промышленный персональный компьютер. Подвесная клетка, имеющая функцию автоматического выравнивания, подвешена и закреплена на вершинной балке гидравлической крепи. В подвесную клетку установлен тахеометр и промышленный персональный компьютер. Оснащенная соответствующим разъемом призма соединена с основанием тахеометра. В соответствии с подъемом и опусканием комплексно-механизированного очистного забоя шахты вдоль поверхности очистного забоя последовательно располагается несколько измерительных роботов так, что соседние измерительные роботы находятся в поле зрения друг друга; в результате формируется автоматическая измерительная система комплексно-механизированного очистного забоя, покрывающая область шахты. С помощью упомянутого роботизированного устройства измерения комплексно-механизированного очистного забоя и автоматической измерительной системы проводятся измерения геодезических координат стационарных и подвижных целей очистного забоя шахты. Достигается технический результат – уменьшение продолжительности определения направления севера гироскопическим тахеометром и повышение качества измерений в очистном забое. 2 н. и 2 з.п. ф-лы, 3 ил.

Формула
Документы, цитированные в отчёте о поиске
Способ определения абсолютного положения угледобывающей машины

Комментарии