Способ оценки степени опасности подводного погружения и использование этого способа в подводном компьютере - RU2675286C1
Код документа: RU2675286C1
Чертежи
Описание
Настоящее изобретение имеет отношение к способу оценки степени опасности подводного погружения и использованию этого способа в подводном компьютере.
В подводных компьютерах в настоящее время используются различные алгоритмы декомпрессии.
Вообще говоря, такие компьютеры сообщают водолазу информацию относительно времени, требуемого для подъема, и остановок, которые необходимо выполнять на определенных глубинах при завершении погружения, чтобы избежать декомпрессионной болезни, т.е. болезни, которая характеризуется образованием пузырьков газа внутри кровеносных сосудов или тканей и возникает вследствие недостаточного удаления из организма водолаза инертных газов, таких как азот.
Подводные компьютеры используются водолазами уже более 25 лет, и их назначение заключается в том, чтобы сделать погружения более безопасными.
В целом, подводные компьютеры применяют специальные математические модели, так называемые алгоритмы декомпрессии, для оценки последствий воздействия на организм гипербарических условий и последствий возвращения к атмосферному давлению после подъема при завершении погружения. В частности, алгоритмы декомпрессии пытаются оценить степень накопления инертных газов, таких как азот и/или гелий, из газовой дыхательной смеси, как правило, кислородно-азотной или кислородно-азотно-гелиевой смеси, в различных тканях организма на начальном этапе погружения и степень выведения таких инертных газов на заключительном этапе погружения.
Основными факторами или параметрами, которые определяют степень поглощения инертных газов соответствующими тканями организма, являются тип вдыхаемой газовой смеси, глубина и тип погружения.
В зависимости от профиля погружения (т.е. графика, отображающего изменение глубины погружения как функции времени), водолаз не может выполнить подъем непосредственно на поверхность, не подвергая себя высокому риску развития декомпрессионной болезни вследствие высвобождения тканями организма инертных газов.
В некоторых случаях подводные компьютеры определяют необходимость одной или более декомпрессионной(-ых) остановки(-ок) на глубине начиная от 3 метров, во время которой(-ых) организм водолаза может высвобождать инертные газы при давлениях, превышающих давление окружающей среды, до тех пор, пока не высвободится такое количество газа, которое будет достаточным для выхода водолаза на поверхность без риска развития декомпрессионной болезни.
Даже если принять во внимание, что физиология тела человека в условиях погружения не является однозначное понимаемой и исследована не полностью, модели декомпрессии, основанные на эмпирических наблюдениях, являются особенно полезными для повышения безопасности водолаза, прежде всего потому, что они совершенствовались на протяжении многих лет и демонстрируют эффективность на практике.
Один широко используемый подход основан на применении модели, которая предусматривает разделение человеческого тела на определенное количество групп тканей ("компартментов"), при этом каждая из этих групп определяется удельной скоростью поглощения азота или гелия (обычно называемой "полупериодом"; известно специалистам как "half time") и пороговым значением, отображающим такое максимальное давление, также называемое натяжением (известно специалистам как tension"), превышающее давление окружающей среды, которое может переноситься тканью. Для обозначения избытка давления в ткани относительно давления окружающей среды употребляют термин "перенасыщение" (известно специалистам как "supersaturation"). Известно, что ткани с коротким полупериодом переносят более высокие значения перенасыщения, чем ткани с продолжительным полупериодом.
В этом случае целью алгоритма является вычисление в каждый момент времени, для каждой ткани, степени натяжения в зависимости от давления вдыхаемого инертного газа и значения полупериода для этой ткани, а также проверка того, что не было превышено максимальное переносимое перенасыщение.
Модели такого типа могут иметь различные формы и названия, но используемые в ней уравнения зачастую являются одинаковыми.
Другой подход представлен пузырьковой моделью (известна специалистам как "bubble model"), в которой, помимо определения степеней поглощения и высвобождения инертного газа, используются вычисления в отношении роста и распада "тихих" пузырьков (микропузырьков азота в крови), что должно отображать опасность декомпрессии. Целью такого алгоритма является контроль и ограничение роста "тихих" пузырьков (известны специалистам как "silent bubbles").
Известные алгоритмы декомпрессии не различают тип погружения и используют одни и те же уравнения и математические модели независимо от типа погружения водолаза, в результате чего для 20-минутного погружения на глубину 20 метров используются те же уравнения и критерии безопасности, что и для 100-минутного погружения на глубину 60 метров.
Однако опыт показывает, что если первое погружение можно рассматривать как безопасное, то второе погружение следует рассматривать как весьма рискованное. Так как эти два погружения будут приводить к различным воздействиям на организм человека, одна и та же математическая модель вряд ли сможет эффективно интерпретировать оба этих погружения. В таких алгоритмах используются уравнения, результатом которых является линейное изменение (увеличение) времени подъема в зависимости от увеличения времени, проведенного водолазом на глубине, тогда как научное исследование, выполненное в Англии в восьмидесятых годах и описанное в документе: "Decompression Sickness form Commercial Offshore Air-Diving Operations on the UK Continental Shelf during 1982 to 1986", T.G. Shields, P. M. Duff, W.B Lee, S.E. Winlock, Hyperbaric Medicine Unit ОТ 0-89-029", показывает, что при использовании этого типа "линейных" алгоритмов начиная с определенной продолжительности и интенсивности воздействия на организм гипербарических условий происходит значительное увеличение риска развития декомпрессионной болезни, что приводит к предположению о том, что нелинейность применительно к изменению времени подъема была бы более обоснованной.
Такое отклонение от линейности случается не сразу, а только в случае определенных "воздействий", и, следовательно, существует необходимость оценки одного отдельного "воздействия", т.е. необходимость присвоения погружению показателя опасности.
В настоящее время все доступные на рынке алгоритмы позволяют задавать лишь дополнительный уровень безопасности, который, однако, применяется с самого начала погружения и лишь делает алгоритм в целом более консервативным.
В частности, предлагаемые алгоритмы позволяют компьютеру отдельно рассматривать три диапазона глубин погружения с тем, чтобы присвоить один консервативный уровень, а именно "уровень осторожности", для глубин от поверхности до первой глубины погружения (например, до глубины 30 м), и другой консервативный уровень для глубин от второй глубины погружения и далее (например, от 50 м и далее), и интерполировать эти два уровня в диапазоне глубин, определяемом указанными двумя глубинами погружения (в этом примере - диапазон 30-50 м). Однако консервативный уровень присваивается лишь на основании максимальной глубины погружения, достигаемой водолазом, и вообще не принимается во внимание время, проводимое водолазом на различных глубинах. Кроме того, не учитывается тип газовой дыхательной смеси, что делает сомнительной возможность применения такого подхода.
В документе US 5,363,298 описан измеритель риска декомпрессии, в котором применяется концепция на основе показателя воздействия давления. Этот показатель представляет собой сочетание всех параметров, необходимых для определения риска развития у водолаза декомпрессионной болезни в соответствии с уравнением для расчета вероятности развития декомпрессионной болезни. Алгоритм оценки риска определяет как показатель воздействия давления, так и риск развития декомпрессионной болезни. Способ определения основан на сопоставлении данных из базы данных о погружениях, результаты которых являются известными в отношении декомпрессионной болезни, и, таким образом, упомянутый показатель воздействия давления является результатом сопоставления с данными, относящимися к другим водолазам. Такой алгоритм оценки риска применяется вместо уравнений, которые определяют газообмен в соответствии с моделями поглощения и высвобождения газов тканями, на основе фактического давления, которое воздействует на водолаза и определяется в режиме реального времени. Таким образом, оценка риска основана не на профиле "давление-время", получаемом в режиме реального времени, а на калибровке алгоритма оценки риска на основе соответствующей базы данных. По существу, алгоритм определения не меняется, но лишь применяется коэффициент консервативного уровня, такой как описано выше, без непосредственного принятия во внимание зависимости от реальных данных, касающихся времени, средней глубины и состава газа, которые определяются в режиме реального времени.
Таким образом, существует необходимость, не удовлетворяемая известными подводными компьютерами и соответствующими способами, в создании такой системы объективной оценки степени опасности подводного погружения, которая позволила бы водолазу не подвергать себя высокому риску или, как альтернатива, увеличивать степень консервативности алгоритма в зависимости от степени опасности погружения.
Настоящее изобретение достигает указанной выше цели посредством способа оценки степени опасности погружения, который предусматривает вычисление показателя степени опасности погружения.
Упомянутое вычисление осуществляют с помощью выполнения следующих этапов:
а) определение состава газовой смеси, вдыхаемой водолазом;
b) измерение продолжительности погружения;
c) определение профиля глубины погружения;
d) вычисление показателя степени опасности погружения как функции от результатов выполнения этапов a), b) и c);
e) оценка степени опасности на основании результата вычисления показателя степени опасности погружения на этапе d);
причем этапы a), b), c), d) и е) выполняют в режиме реального времени, в каждый момент времени погружения водолаза,
и вычисление на этапе d) выполняют по следующей формуле:
DSI=k1*f(GAS)*f(D)*f(T),
где:
DSI - показатель степени опасности погружения,
k1 - произвольная постоянная,
f(GAS) - функция от состава вдыхаемой газовой смеси,
f(D) - функция от глубины погружения,
f(Т) - функция от продолжительности погружения.
Как следует из приведенной формулы, показатель степени опасности определяется совокупностью параметров, к которым относятся состав вдыхаемой газовой смеси, продолжительность погружения и глубина погружения. Следовательно, формула принимает во внимание основные параметры, которые следует учитывать при погружении.
Таким образом, упомянутый показатель степени опасности позволяет дифференцированно подходить к различным типам погружений, позволяя оценивать профиль погружения по совокупности параметров, каждый из которых представляет собой функцию: функцию от состава вдыхаемой газовой смеси, функцию от продолжительности погружения и функцию от глубины погружения.
Особенно важным аспектом способа по настоящему изобретению является то, что предлагаемый показатель степени опасности является полностью независимым от выбранного алгоритма декомпрессии.
Следует отметить, что в случае погружения с разомкнутым контуром (используется баллон акваланга с регулятором для подводного плавания) состав вдыхаемой газовой смеси определяют перед погружением, и он остается неизменным на всем протяжении погружения.
Таким образом, ясно, что этап, определенный выше как этап а), при погружениях с разомкнутым контуром фактически не выполняют в режиме реального времени.
При этом данные, имеющие отношение к определению состава вдыхаемой газовой смеси, получают в начале погружения, и они используются в каждый момент времени при выполнении этапов b), c) и d) в режиме реального времени.
Кроме того, следует отметить, что, в зависимости от условий погружения, функции f(GAS), f(D) и f(T) могут быть равны единице, так что DSI будет равен произвольной постоянной k1.
Кроме того, функции f(GAS), f(D) и f(T) по отдельности могут быть равны единице или некоторому постоянному значению.
Например, если функция f(GAS) равна единице, то это означает, что DSI будет определяться другими функциями и будет независим от состава газовой смеси, но будет зависеть от продолжительности и глубины погружения.
То же самое справедливо и для остальных функций f(D) и f(Т), которые поочередно и по отдельности могут быть равны некоторым постоянным значениям, так что DSI будет независим, соответственно, от значений глубины и/или продолжительности погружения.
Как понятно из описанного выше, задачей способа по настоящему изобретению является информирование водолаза о степени опасности выполняемого им погружения, и полученный с помощью этого способа результат может быть применен в любом известном алгоритме декомпрессии.
С этой целью, в соответствии с одним из вариантов осуществления способ по настоящему изобретению включает дополнительный этап изменения параметров алгоритма декомпрессии в соответствии со значением показателя степени опасности погружения.
Таким образом, обеспечивается возможность модификации известных алгоритмов декомпрессии путем их адаптации с учетом степени опасности погружения во время погружения.
Кроме того, предлагается динамический способ определения показателя степени опасности погружения, что позволяет рассчитывать декомпрессию в режиме реального времени.
Например, можно предложить использовать способ оценки по настоящему изобретению совместно с известным алгоритмом Бульмана, с тем, чтобы формировать таблицу подъема, минимизирующую риск развития декомпрессионной болезни.
В этом случае идея заключается в том, чтобы сделать алгоритм Бульмана более консервативным, но при этом консервативность обеспечивается выборочно: например, на основе показателя степени опасности можно модифицировать алгоритм Бульмана, все сильнее уменьшая его значения максимального переносимого перенасыщения по мере увеличения значения показателя степени опасности погружения.
Как альтернатива, можно также варьировать значения полупериодов. Например, увеличивая значения полупериода на заключительном этапе погружения, можно замедлить процесс высвобождения инертного газа из определенной ткани относительно базового значения, что приведет к увеличению продолжительности декомпрессии относительно базовой оценки.
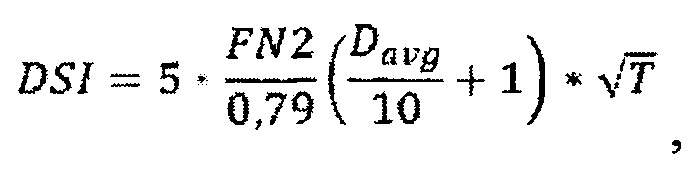
В соответствии с предпочтительным вариантом осуществления настоящего изобретения вычисление показателя степени опасности погружения выполняют по следующей формуле:
где:
Davg представляет собой среднюю глубину погружения, выраженную в метрах и обновляемую в каждый момент времени,
Т представляет собой продолжительность погружения в минутах вплоть до настоящего момента времени, и
f(GAS) представляет собой функцию от состава вдыхаемой газовой смеси, которая в случае воздуха равна 1.
Например, если вдыхаемой газовой смесью является 32%-я кислородно-азотная смесь (32% кислорода и 68% азота), формула будет иметь следующий вид:

т.е. в формуле присутствует коэффициент нормализации, обусловленный тем, что объемная доля азота во вдыхаемой газовой смеси отличается от объемной доли азота в воздухе (79%).
В предпочтительном варианте осуществления настоящего изобретения на этапе "е) оценка степени опасности" погружение определяют как:
неопасное - при значениях показателя степени опасности менее 80,
переходное от неопасного к опасному - при значениях показателя степени опасности в диапазоне от 80 до 100,
опасное - при значениях показателя степени опасности в диапазоне от 100 до 120,
очень опасное - при значениях показателя степени опасности, превышающих 120.
Ближе к завершению погружения, когда продолжительность погружения все еще растет, в то время как средняя глубина погружения значительно падает по мере приближения водолаза к поверхности, в какой-то момент времени значение DSI начинает уменьшаться относительно значения DSI, рассчитанного в предыдущий момент времени. Это не означает снижения степени опасности погружения, и поэтому целесообразно прекращать вычисление DSI тогда, когда значение этого показателя начинает падать, и сохранять полученное максимальное значение для определения степени опасности, присваиваемой данному погружению.
Есть две другие ситуации, в которых целесообразно прекращать дальнейшее вычисление DSI:
- при переходе достаточного количества групп тканей от поглощения инертного газа к высвобождению инертного газа (поскольку это означает завершение наиболее опасной части погружения, во время которой ткани поглощают инертный газ азот),
- на глубине, близкой к поверхности (например, 12 м), поскольку на такой глубине тело человека больше не подвергается значительным стрессовым воздействиям вследствие поглощения инертного газа.
Из описанного выше понятно, насколько важен аспект, предполагающий постоянный циклический пересчет показателя степени опасности погружения, поскольку важным является максимальное значение показателя, с учетом описанных выше условий.
Настоящее изобретение также имеет отношение к способу декомпрессии при осуществлении подводного погружения, включающему следующие этапы:
f) определение множества биологических тканей, представляющих тело водолаза,
g) определение для каждой ткани значения полупериода и соответствующего порогового значения, при этом упомянутый полупериод определяет удельную скорость поглощения и/или высвобождения инертного газа соответствующей тканью, а упомянутое пороговое значение определяет такое максимальное значение давления, превышающее давление окружающей среды, которое соответствующая ткань способна переносить,
h) измерение продолжительности погружения,
i) определение профиля глубины погружения.
Упомянутый способ также предусматривает, что с увеличением значений продолжительности и/или глубины погружения уменьшается упомянутое пороговое значение и/или увеличивается значение полупериода для по меньшей мере одной ткани.
Как указано выше, пороговое значение и полупериод являются двумя параметрами, которые можно варьировать для того, чтобы сделать способ декомпрессии по настоящему изобретению более консервативным. Понятно, как эти два параметра могут изменять независимым образом, по отдельности или в сочетании, исходя из конкретных условий погружения.
Более того, определено, каким образом значения продолжительности и глубины погружения соотносятся со степенью опасности погружения, и поэтому ясно, как способ декомпрессии по настоящему изобретению связан с идеей оценки степени опасности погружения.
Например, степень опасности погружения может быть рассчитана в соответствии с одним или более из описанных выше этапов, имеющих отношение к способу оценки степени опасности погружения по настоящему изобретению.
В соответствии с известными способами декомпрессии, по мере увеличения продолжительности и/или глубины погружения увеличивается и продолжительность декомпрессионных остановок, а также добавляются остановки на большей глубине.
Поскольку известные способы определяют продолжительность, глубину и количество декомпрессионных остановок исходя из условий погружения, понятно, как описанный выше способ декомпрессии учитывает степень опасности погружения, а именно - изменяя соответствующим образом упомянутое пороговое значение или упомянутый полупериод, что соответствует изменению декомпрессионных обязательств в части остановок, рассчитываемых с помощью известных способов.
Возможность изменения во время погружения упомянутых выше параметров, порогового значения и полупериода, в частности, уменьшение порогового значения и увеличение значения полупериода, делает алгоритм декомпрессии по настоящему изобретению нелинейным.
В частности, как будет понятно из некоторых раскрытых вариантов осуществления настоящего изобретения, увеличение степени опасности погружения сопровождается непропорциональным уменьшением порогового значения, т.е. имеет место непропорциональное увеличение декомпрессионных обязательств. Тот же результат получают, увеличивая, при увеличении степени опасности погружения, значение полупериода на этапе высвобождения инертного газа.
В соответствии с предпочтительным вариантом осуществления способа декомпрессии по настоящему изобретению, увеличение показателя степени опасности погружения приводит к уменьшению пороговых значений и/или увеличению полупериодов для всех тканей, определенных на этапе f).
Кроме того, в предпочтительном варианте осуществления настоящего изобретения этапы f), g), h), i) и, следовательно, расчет необходимого уменьшения порогового значения и/или увеличения полупериода, можно выполнять в режиме реального времени.
В соответствии с еще одним вариантом осуществления настоящего изобретения предусмотрено, что давление, используемое на этапе g), т.е. такое давление, превышающее давление окружающей среды, которое может переноситься тканью, определяется формулой:
где:
b - параметр, в основном отвечающий за влияние высоты,
а - параметр, имеющий отношение к полупериоду каждой ткани.
Известно, что максимальное перенасыщение, определяемое максимальным давлением, переносимым тканью, не является одинаковым для всех тканей, т.е., как отмечено выше, "быстрые" ткани переносят более высокое перенасыщение, чем "медленные" ткани, причем соотношение между ними может составлять, например, от 2,50 до 1,67 (и даже эти значения зависят от фактических обстоятельств).
Таким образом, в соответствии с таким вариантом осуществления целью способа декомпрессии по настоящему изобретению является поддержание парциального давления азота в каждой ткани на уровне ниже максимального переносимого давления, в частности:

Известно, что парциальное давление азота для каждой ткани определяется по формуле:
где:

ф - полупериод ткани.
При этом предполагается, что обмен азота между вдыхаемым газом и альвеолами является мгновенным. Первая величина, стоящая в скобках, представляет собой максимальный градиент давления, доступный для переноса азота, тогда как вторая величина, стоящая в скобках, представляет собой фактор времени (замедление), обусловленный постепенным увеличением содержания азота в ткани и имеющий отношение к концепции полупериода.
С учетом описанных выше предпочтительных особенностей, настоящее изобретение также имеет отношение к показателю степени опасности погружения, используемому для оценки параметров во время подводного погружения.
Как описано выше, показатель степени опасности выражается следующей формулой:
DSI=k1*f(GAS)*f(D)*f(T),
где:
DSI - показатель степени опасности погружения,
k1 - произвольная постоянная,
f(GAS) - функция от состава вдыхаемой газовой смеси,
f(D) - функция от глубины погружения, и
f(T) - функция от продолжительности погружения.
Показатель степени опасности по настоящему изобретению может обладать одной или более особенностью(-ями), описанной(-ыми) выше, и имеет отношение к способу оценки степени опасности погружения по настоящему изобретению.
В частности, в соответствии с одним из вариантов осуществления настоящего изобретения, показатель степени опасности может быть выражен следующей формулой:
где:
Davg - средняя глубина погружения, выраженная в метрах и обновляемая в каждый момент времени, и
Т - продолжительность погружения, выраженная в минутах.
И наконец, настоящее изобретение также имеет отношение к подводному компьютеру, включающему в себя по меньшей мере одно устройство отображения, по меньшей мере один процессор, содержащий средства для выполнения логической программы, а также блок для определения конкретных физических параметров, имеющих отношение к погружению.
В частности, упомянутая логическая программа реализует алгоритм декомпрессии, который характеризуется одной или более из описанных выше особенностей способа оценки степени опасности погружения и способа декомпрессии по настоящему изобретению.
Предпочтительно, подводный компьютер по настоящему изобретению может выдавать водолазу сигнал предупреждения при выполнении определенных условий во время погружения, а также обеспечивать водолазу возможность ручной установки таких условий.
Для этого подводный компьютер по настоящему изобретению предпочтительно включает в себя блоки управления, выполненные с возможностью генерирования акустических и/или визуальных сигналов оповещения при достижении показателем степени опасности погружения заранее определенных пороговых значений.
Кроме того, может быть предусмотрен интерфейс ввода/вывода, выполненный так, чтобы обеспечить водолазу возможность введения управляющих данных для изменения параметров упомянутого алгоритма декомпрессии.
Эти и другие особенности и преимущества настоящего изобретения станут более понятными из нижеследующего описания некоторых вариантов осуществления этого изобретения, иллюстрируемых прилагаемыми фигурами, на которых:
Фиг. 1а-1р представляют собой некоторые возможные изображения, выводимые на экран подводного компьютера по настоящему изобретению;
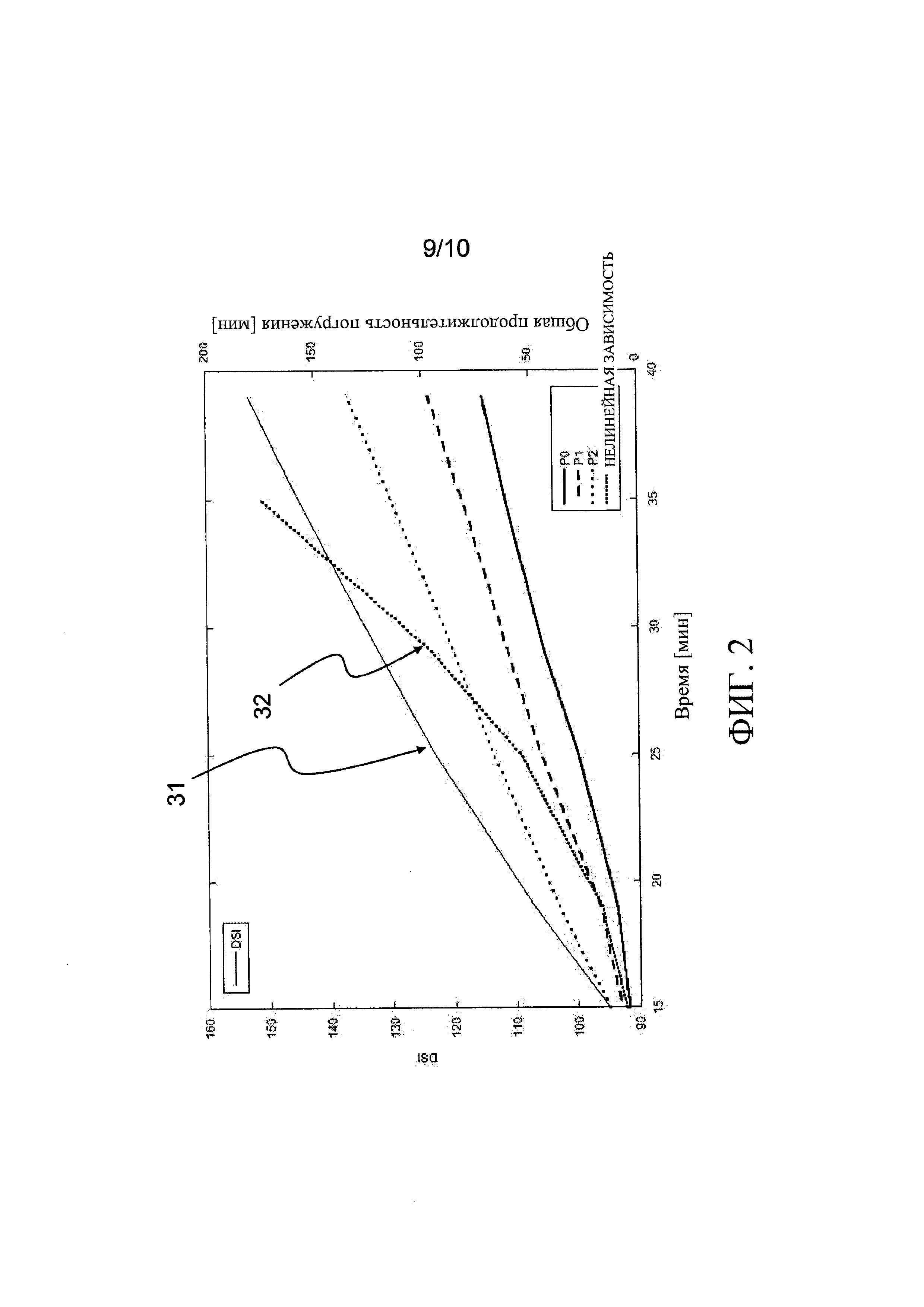
Фиг. 2 представляет собой график, полученный с использованием способа декомпрессии по настоящему изобретению;
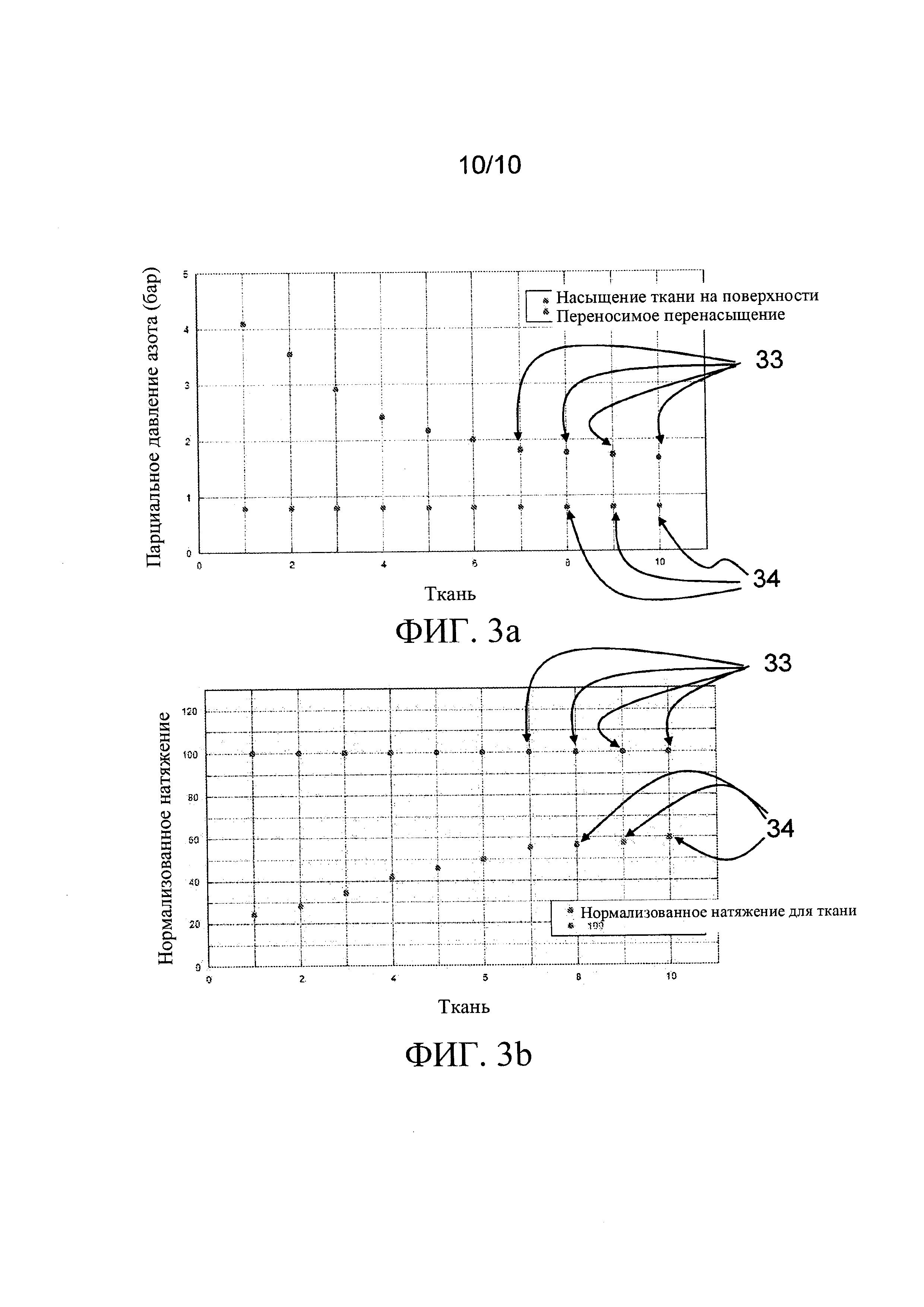
Фиг. 3а и Фиг. 3b представляют собой два графика, иллюстрирующие этапы способа по настоящему изобретению.
Следует отметить, что на соответствующих фигурах показан возможный вариант реализации подводного компьютера, которым реализуется алгоритм погружения, включающий способ оценки степени опасности подводного погружения в соответствии с одной или более особенностью(-ями), описанной(-ыми) выше. Из соображений простоты изложения, рассматриваемые ниже пример и фигуры оперируют двухкомпонентной смесью, смесью кислорода и азота, с постоянным соотношением компонентов (погружение с разомкнутым контуром с использованием кислородно-азотной смеси).
Соответственно, работа подводного компьютера основана на использовании любого из известных алгоритмов декомпрессии в сочетании с этапами способа оценки по настоящему изобретению.
Параметры, которые будут описаны ниже, регистрируемые подводным компьютером, перед их отображением на экране компьютера подлежат изменению в зависимости от значений показателя степени опасности погружения.
В частности, параметрами, которые предпочтительно изменяют для каждой биологической ткани, являются полупериод и максимальное переносимое значение перенасыщения.
Соответственно, алгоритм декомпрессии реализуется в подводном компьютере по настоящему изобретению в сочетании с вычислением показателя степени опасности погружения, которое осуществляют с помощью выполнения следующих этапов:
a) ввод параметров газовой смеси, вдыхаемой водолазом, в частности, доли азота в газовой смеси; при этом в случае погружения с замкнутым контуром процентное содержание азота во вдыхаемой газовой смеси получают в каждый момент времени путем измерения состава вдыхаемой газовой смеси;
b) измерение продолжительности погружения,
c) измерение глубины погружения и вычисление среднего значения глубины как функции от продолжительности погружения,
d) вычисление показателя степени опасности погружения,
e) оценка степени опасности погружения на основе результатов вычисления показателя степени опасности на этапе d).
В частности, этапы a), b), c), d) и e) выполняют в режиме реального времени в каждый момент времени погружения водолаза.
Кроме того, упомянутое вычисление выполняют по следующей формуле:
DSI=k1*f(GAS)*f(D)*f(T),
где:
DSI - показатель степени опасности погружения,
k1 - произвольная постоянная,
f(GAS) - функция от состава вдыхаемой газовой смеси,
f(D) - функция от глубины погружения, и
f(T) - функция от продолжительности погружения.
Вычисление показателя степени опасности погружения предпочтительно выполняют по следующей формуле:
где:
Davg - средняя глубина погружения, выраженная в метрах и обновляемая в каждый момент времени, и
Т - продолжительность погружения, выраженная в минутах.
Подводный компьютер по настоящему изобретению включает в себя по меньшей мере одно устройство отображения, снимки экрана которого показаны на Фиг. 1а-1р, по меньшей мере один блок процессор, содержащий средства для выполнения логической программы, а также блоки для определения конкретных физических параметров, имеющих отношение к погружению.
Упомянутые средства для выполнения логической программы предназначены для выполнения алгоритма декомпрессии в сочетании со способом оценки степени опасности погружения по настоящему изобретению.
Упомянутые блоки для определения конкретных физических параметров, имеющих отношение к погружению, могут определять, например, продолжительность погружения и глубину погружения.
Как упомянуто выше, логическая программа обрабатывает такие данные, следуя правилам алгоритма декомпрессии, загруженного в подводный компьютер, и с учетом значений упомянутого выше показателя степени опасности.
В частности, выходные данные алгоритма декомпрессии подлежат изменению различным образом в зависимости от степени опасности погружения.
Предпочтительно предусмотрено четыре степени опасности погружения, в частности:
неопасное - при значениях показателя степени опасности менее 80,
переходное от неопасного к опасному - при значениях показателя степени опасности в диапазоне от 80 до 100,
опасное - при значениях показателя степени опасности в диапазоне от 100 до 120,
очень опасное - при значениях показателя степени опасности, превышающих 120.
Также, как было упомянуто выше, процесс вычисления показателя степени опасности погружения можно прекращать, если показатель степени опасности погружения начинает уменьшаться.
Предпочтительно процесс вычисления показателя степени опасности погружения можно прекратить в случае выполнения одного или нескольких из следующих условий, независимо или в сочетании друг с другом:
- поднятие до глубины 12 м,
- использование некоторой определенной газовой смеси вместо ранее использовавшейся газовой смеси,
- достижение некоторого заранее определенного уровня высвобождения азота одной или более тканью(-ями) тела водолаза,
- значение показателя степени опасности погружения, рассчитанное в некоторый конкретный момент времени, ниже значения, рассчитанного в предыдущий момент времени.
Ниже описан возможный вариант реализации подводного компьютера с упомянутыми выше особенностями.
Поглощение и высвобождение азота моделируется для заданного количества так называемых "компартментов", каждый из которых представляет определенную группу тканей тела.
Например, один компартмент представляет мышцы, другой представляет кости и т.д.
Ткани характеризуются полупериодом, который представляет собой параметр, отражающий скорость, с которой они поглощают азот.
В частности, как это имеет место в описываемом варианте осуществления настоящего изобретения, в алгоритме декомпрессии используют только десять тканей для инертного газа азота, со следующими полупериодами (в минутах): 2,5, 5, 10, 20, 30, 40, 60, 80, 120, 240.
Ткани с короткими полупериодами называют "быстрыми" тканями, тогда как те, которые имеют длительный полупериод, называют "медленными" тканями.
Каждая ткань также характеризуется вторым параметром, а именно пороговым значением, представляющим собой такое максимальное значение давления, также называемое натяжением, превышающее давление окружающей среды, которое может переноситься данной тканью.
Для обозначения избытка давления в ткани относительно давления окружающей среды употребляют термин "перенасыщение" (известно специалистам как "supersaturation"). Известно, что быстрые ткани способны переносить более высокие значения перенасыщения, чем медленные ткани.
Подводный компьютер отслеживает поглощение и высвобождение азота для каждой ткани, исходя из профиля "глубина-время" и полупериода соответствующей ткани.
Контрольное условие безопасного подъема заключается в том, что избыток давления ни в одной ткани не должен превысить соответствующее пороговое значение при погружении или при подъеме.
Если это условие не соблюдается, то процесс подъема прерывают, выполняя одну или более декомпрессионную(-ых) остановку(-ок), во время которой(-ых) азот может высвободиться из тела водолаза, когда он находится в условиях такого давления окружающей среды, при котором соблюдается соответствующее контрольное условие.
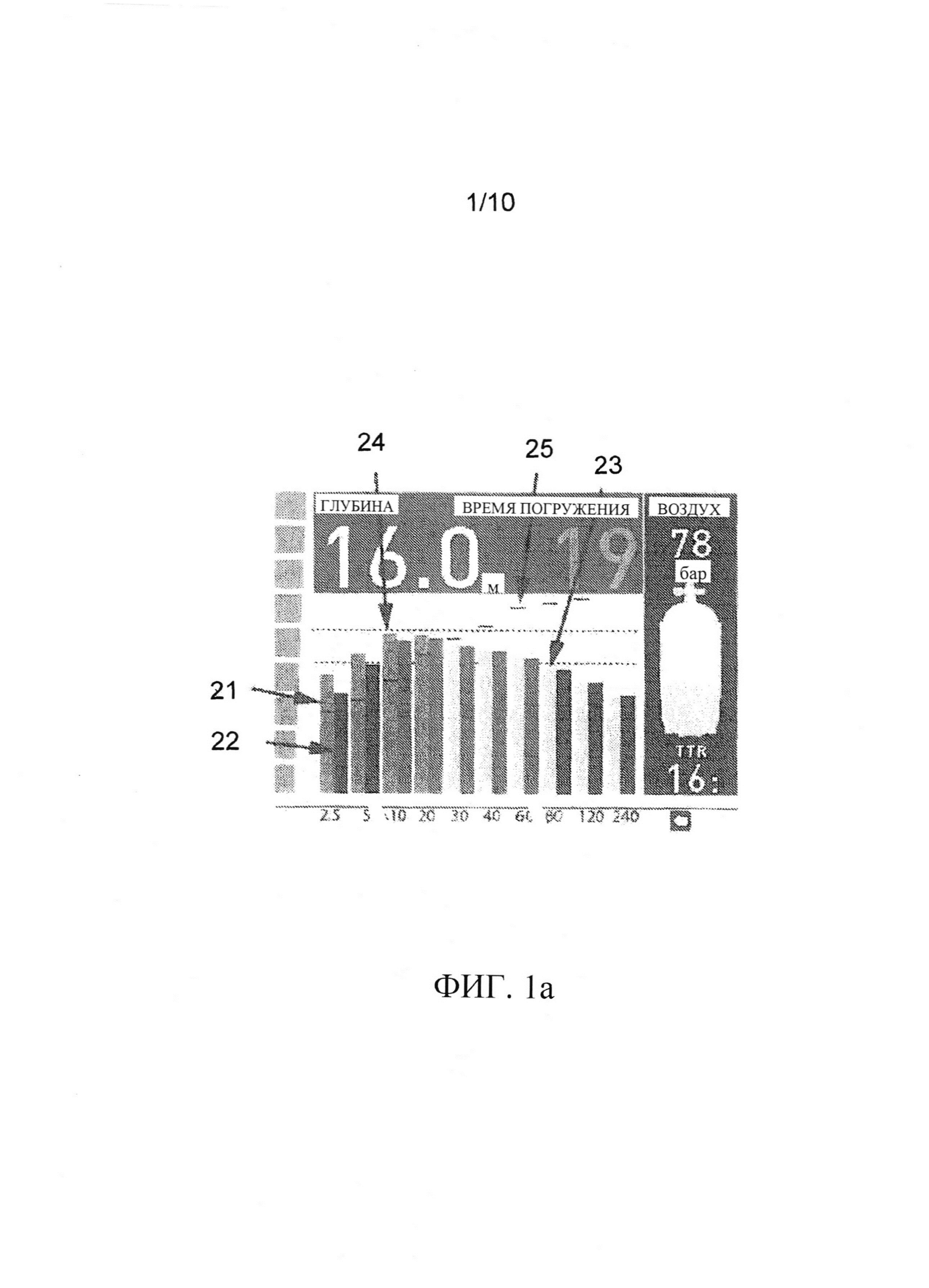
Несколько снимков экрана подводного компьютера по настоящему изобретению, показанных на Фиг. 1а-1р, иллюстрируют изменение давления азота, также называемого натяжением ткани, во время погружения, и его влияние на декомпрессионные вычисления.
Как проиллюстрировано на Фиг. 1а, полу периоды десяти тканей отображены на горизонтальной оси, при этом они увеличиваются слева направо.
Каждая ткань представлена двумя вертикальными столбиками, а именно левым столбиком 21 и правым столбиком 22.
Из соображений сохранения наглядности позициями обозначены только столбики, которые относятся к первой ткани слева, но описание, приведенное выше и ниже, справедливо и для остальных тканей.
Высота левого столбика 21 представляет собой мгновенную нагрузку, рассчитанную в любой отдельно взятый момент времени.
Высота правого столбика 22 представляет собой прогнозируемое значение левого столбика 21 после подъема на поверхность со скоростью 10 метров в минуту с текущей глубины.
Эта оценка имеет большое значение, поскольку во время подъема в тканях продолжается обмен азота, и этот факт нужно учитывать (этот аспект очевиден, если учесть, что подъем с глубины 40 метров длится по меньшей мере 4 минуты, т.е. почти вдвое дольше полупериода самой быстрой ткани и почти столько же, сколько составляет полный полупериод второй по быстроте ткани).
В зависимости от состояния ткани в конкретный момент времени левый столбик 21 может быть незначительно выше или ниже правого столбика 22.
Левый столбик 21 выше правого столбика 22, если ткань полностью заполнена азотом и во время подъема будет высвобождать инертный газ вследствие снижения давления. Левый столбик 21 ниже правого столбика 22, если ткань еще не поглотила достаточно большое количество азота и, даже при уменьшении давления во время подъема, будет поглощать большее количество инертного газа, чем высвобождать (очевидно, каждая ткань высвобождает инертный газ, когда она находится достаточно близко к поверхности).
Следует отметить, что для медленных тканей, расположенных ближе к правому краю на горизонтальной оси, вследствие их длительных полупериодов описанная разница во время подъема оказывается незначительной, так что два столбика 21 и 22, представляющие соответствующую медленную ткань, имеют одинаковую высоту.
Поскольку различные ткани переносят различные значения перенасыщения, для облегчения интерпретации изображения вертикальная ось графика нормализована так, чтобы для каждой ткани упомянутое выше пороговое значение находилось на одном и том же уровне.
На Фиг. 3a и Фиг. 3b продемонстрирована такая нормализация, в частности, на Фиг. 3a показано давление в тканях в условиях нахождения водолаза на поверхности перед погружением, при этом точками, обозначенными позицией 34, показано парциальное давление азота в тканях (0,79 атм), и точками, обозначенными позицией 33, показано максимальное переносимое перенасыщение.
С другой стороны, на Фиг. 3b вертикальная ось нормализована так, что все точки, обозначенные позицией 33, находятся на уровне 100, а точки, обозначенные позицией 34, смещены по вертикали соответствующим образом.
При таком варианте отображения порогового значения через соответствующий график проходит горизонтальная линия 23, называемая нулевой линией, поскольку, когда контрольное условие алгоритма соблюдается - на поверхности (т.е. на глубине 0 метров), все столбики находятся под этой линией.
Тем самым обеспечивается возможность быстрого визуального контроля: если один из правых столбиков пересекает эту линию во время погружения, то это означает, что если водолаз будет совершать подъем на поверхность в этот момент времени, то для соответствующей ткани будет нарушаться контрольное условие (т.е. давление в этой ткани превысит соответствующее пороговое значение).
Следовательно, это указывает на декомпрессионное обязательство, т.е. на необходимость провести некоторое время ниже уровня поверхности (при таком давлении, превышающем давление окружающей среды на поверхности, при котором все еще соблюдается контрольное условие) с тем, чтобы высвободить часть азота и, следовательно, уменьшить высоту соответствующего столбика до тех пор, пока он снова не опустится ниже нулевой линии.
Можно предусмотреть, чтобы столбики принимали различные цвета в зависимости от своего положения.
Например, можно предусмотреть, чтобы правый столбик 22 менял свой цвет с синего на красный при пересечении линии 23.
Подобным образом, можно предусмотреть, чтобы подводный компьютер включал в себя блоки управления, выполненные с возможностью генерирования акустических и/или визуальных сигналов оповещения при достижении показателем степени опасности погружения заранее определенных пороговых значений.
В частности, как показано на Фиг. 1а-1р, отображение правого столбика 22 красным цветом будет указывать на необходимость декомпрессионной остановки.
При высвобождении количества азота, достаточного для того, чтобы столбик 22 снова опустился ниже линии 23, его цвет снова становится синим.
На снимке экрана, показанном на Фиг. 1а, имеется вторая горизонтальная линия 24, расположенная выше линии 23 и называемая трехметровой линией, которая отображает контрольное условие применительно к глубине в три метра.
Подобно тому, что раскрыто в отношении линии 23, любой правый столбик 22, пересекающий такую линию 24, указывает на то, что, если водолаз будет осуществлять подъем на поверхность в этот момент времени, то контрольное условие будет нарушено уже на глубине в три метра.
Таким образом, если правый столбик 22 пересекает такую линию 24, то возникает декомпрессионное обязательство на глубине в 6 метров (интервал дискретизации глубины декомпрессионных остановок составляет 3 метра).
Как уже упоминалось выше, пороговые значения не являются одинаковыми для каждой ткани, более быстрые ткани переносят большее перенасыщение, чем более медленные ткани; поскольку в начале первого погружения у всех тканей парциальное давление азота составляет 0,79 атм (т.е. ткани находятся в равновесии с воздухом в атмосферных условиях на уровне моря), вследствие упомянутой выше нормализации по вертикальной оси соответствующего графика оказывается, что в начале первого погружения уровень парциального давления азота для тканей в левой части графика отображается более низким, чем для тканей в правой части графика.
Следует отметить, что на Фиг. 1а-1р проиллюстрирован случай первого погружения, т.е. такого погружения, которое не является повторным погружением, так что в этом конкретном случае в тканях отсутствует остаточное количество азота от предыдущего погружения, которое могло бы повлиять на положения соответствующих столбиков.
То, что описано ниже, в равной мере применимо и для случаев повторных погружений, с единственным очевидным отличием - начальная точка не составляет для всех тканей 0,79 атм, а находится на более высоком уровне в зависимости от количества азота, оставшегося от предыдущего погружения, и продолжительности нахождения на поверхности.
Графическое представление делает очевидным почему повторное погружение характеризуется большими ограничениями, чем первое погружение: при наличии остаточного азота от предыдущего погружения все столбики на графике с самого начала погружения находятся ближе к линии 23 и, следовательно, до пересечения одним из них порога требуется меньше времени.
Кроме того, на графике, показанном на Фиг. 1а, для каждой ткани показан небольшой горизонтальный отрезок 25, совмещенный с левым столбиком 21 каждой ткани.
Положение такого отрезка 25 по вертикальной оси обозначает парциальное давление азота во вдыхаемой газовой смеси.
Во время погружения отрезок 25 перемещается вверх и вниз в зависимости от увеличения/уменьшения глубины погружения.
В случае замены газовой смеси, например, с воздуха на 80%-ю кислородно-азотную смесь, происходит резкий скачок положения такого отрезка 25.
Положение такого отрезка 25 по вертикальной оси имеет большое значение для понимания динамики состояния тканей, поскольку расстояние между отрезком 25 и верхушкой соответствующего столбика представляет собой разницу в парциальном давлении азота между тканью и вдыхаемой газовой смесью, т.е. силу, обуславливающую газообмен, также называемую градиентом давления.
Если два упомянутых элемента (отрезок 25 и верхушка соответствующего столбика) находятся далеко один от другого, то имеет место интенсивное поглощение или высвобождение инертного газа соответствующей тканью (в пределах соответствующего полупериода).
С другой стороны, если два упомянутых элемента находятся близко один к другому, то соответствующая ткань близка к состоянию равновесия.
Даже и в этом случае можно предусмотреть различные цвета для левых столбиков 21 в зависимости от их расположения относительно отрезка 25.
Например, если отрезок 25 находится выше соответствующего столбика и, следовательно, соответствующая ткань поглощает инертный газ (парциальное давление вдыхаемой газовой смеси выше парциального давления инертного газа в ткани), то левый столбик может принимать желтый цвет, тогда как если отрезок 25 находится внутри соответствующего столбика и, следовательно, соответствующая ткань высвобождает инертный газ (парциальное давление вдыхаемой газовой смеси ниже парциального давления инертного газа в ткани), то левый столбик может принимать зеленый цвет.
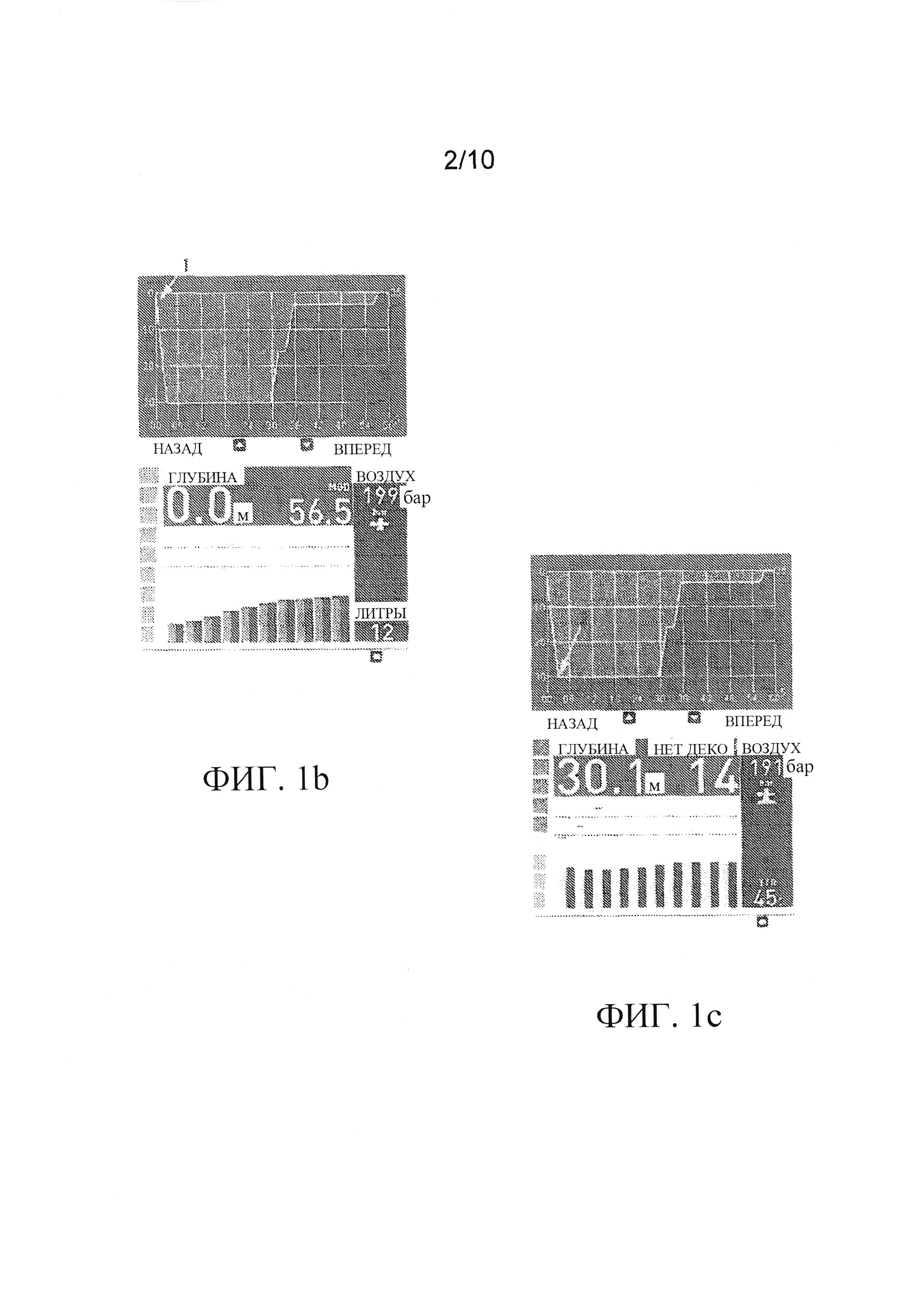
На Фиг. 1b-1р показан пример перпендикулярного погружения на глубину 30 метров в течение 30 минут, поскольку такой вариант погружения представляет собой по существу простейший профиль погружения для описания различных аспектов, упомянутых выше.
Каждая фигура разделена на две части:
в верхней части показан график погружения, т.е. изменение глубины в зависимости от времени,
с другой стороны, в нижней части показан снимок экрана устройства отображения, входящего в состав подводного компьютера, на котором показано состояние всех тканей.
Как будет описано ниже, способы оценки, упомянутые ниже, можно использовать и для неперпендикулярных погружений.
Состояние всех тканей в отношении поглощения/высвобождения инертного газа будет проанализировано для девяти различных моментов погружения.
На Фиг. 1b показана ситуация в начале погружения.
Столбики всех тканей расположены значительно ниже линии 23 и отрезок 25, отображающий парциальное давление вдыхаемой газовой смеси, совпадает с верхушкой каждого столбика 21 и 22 (состояние равновесия в атмосферных условиях).
В случае погружения с использованием кислородно-азотной смеси отрезок 25 будет находиться внутри соответствующего столбика, что указывает на то, что вдыхание кислородно-азотной смеси на поверхности приводит к начальному высвобождению инертного газа соответствующей тканью.
На Фиг. 1с показана ситуация в конце погружения: высота столбиков незначительно увеличилась вследствие поглощения азота в течение полутора минут спуска.
Отрезки 25, отображающие давление азота во вдыхаемой газовой смеси, переместились вверх, что указывает на то, что инертный газ поглощается тканями со скоростью, пропорциональной расстоянию между каждым отрезком и верхушкой соответствующего столбика.
При постоянной глубине скорость, с которой ткань поглощает инертный газ, уменьшается с течением времени.
Этот аспект наглядно представлен на графике, поскольку отрезок 25, отображающий давление вдыхаемого азота, не перемещается (поскольку глубина является постоянной), тогда как высота столбика увеличивается по мере поглощения азота тканью, так что отрезок и верхушка столбике сближаются.
Если водолаз достаточно долго остается на постоянной глубине, то ткань достигает соответствующего отрезка и газообмен прекращается: считается, что ткань находится в состоянии равновесия или насыщения. Как следует из определения полупериода, после 6 полупериодов в условиях постоянного давления давление в ткани достигает 98,4% от давления, которому она подвергается, и поэтому ее можно считать насыщенной.
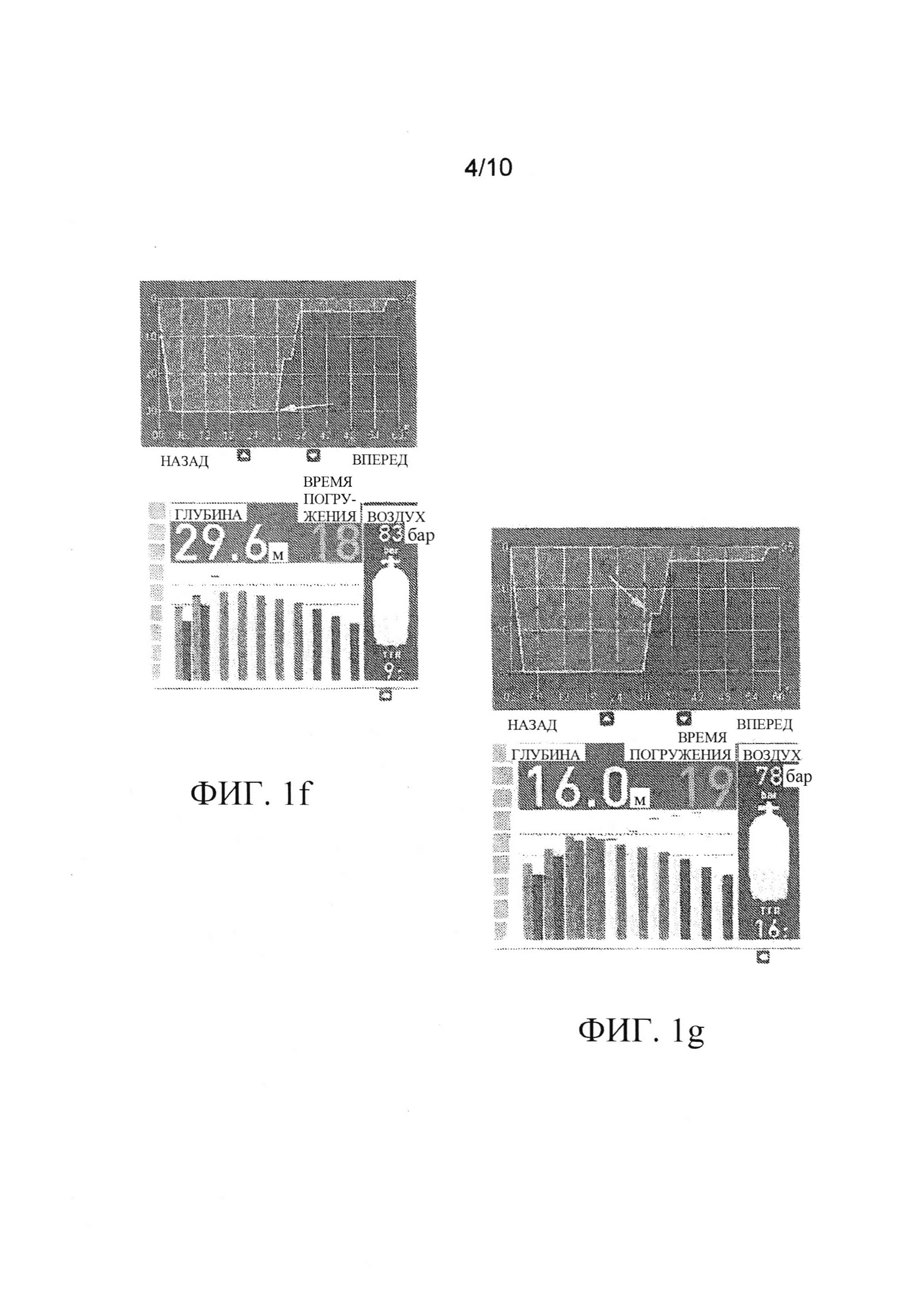
На Фиг. 1f показано, что через 30 минут, проведенных на глубине 30 метров, после подъема всего на 0,5 метров ткани с полупериодом 2, 5 и 5 минут уже высвобождают инертный газ, т.е. они являются фактически насыщенными, тогда как более медленные ткани далеки от состояния равновесия давления, пропорционально продолжительности полупериодов соответствующих тканей.
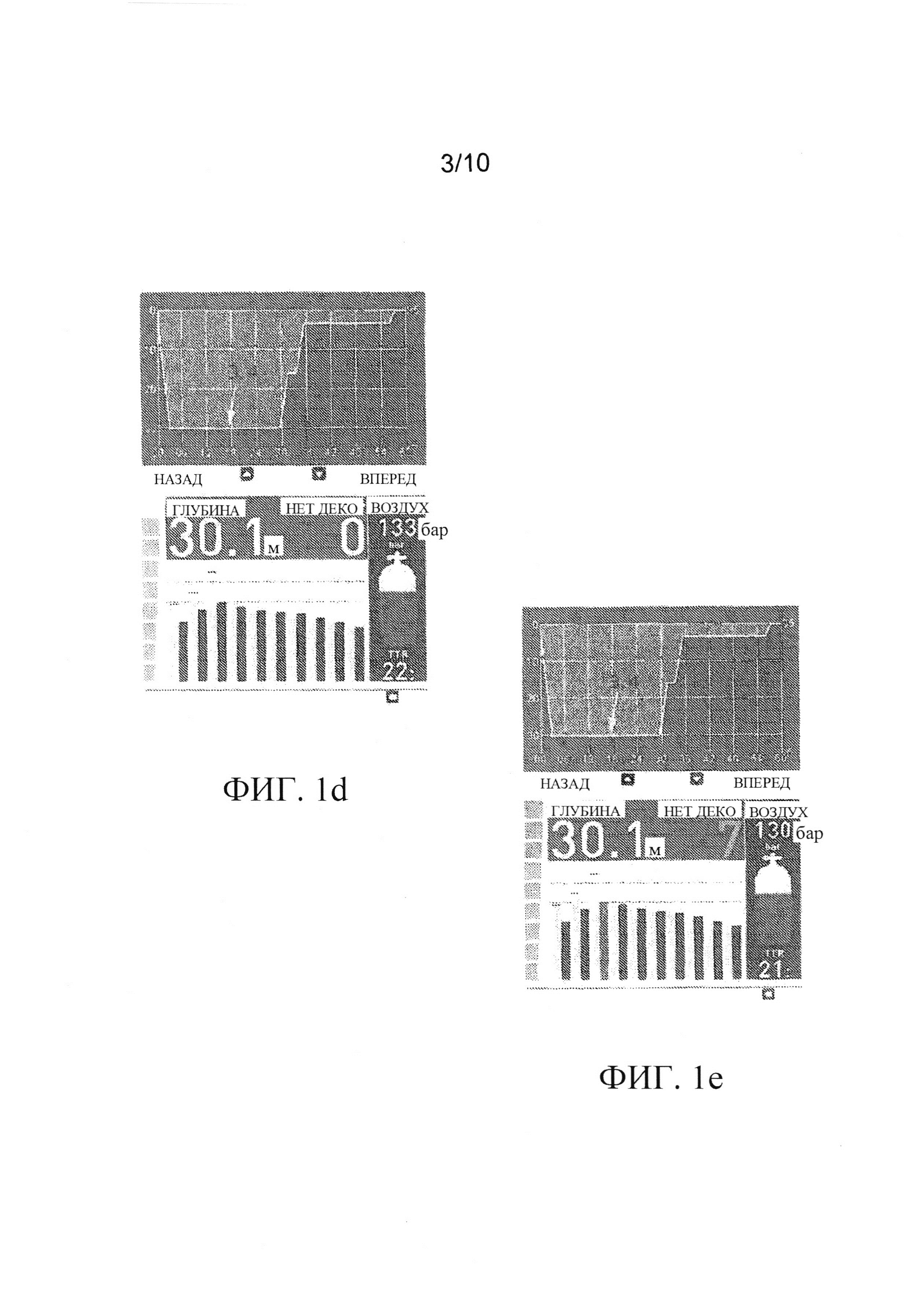
На Фиг. 1d показана ситуация на 18-й минуте нахождения на глубине, непосредственно перед окончанием бездекомпрессионного предела: самая быстрая ткань фактически насыщена (отрезок 25 и верхушка соответствующего столбика 21 совмещены), тогда как насыщение очень медленных тканей возросло.
Однако наибольшего внимания в этом примере заслуживает тот факт, что правый столбик 22 третьего отрезка 25 почти достиг горизонтальной линии 23.
Уже в последующий момент времени, как показано на Фиг. 1е, упомянутый столбик пересекает этот порог.
Итак, на Фиг. 1е третья ткань пересекла линию 23. Как упомянуто выше, это означает, что такая ткань при подъеме на поверхность со скоростью 10 м/мин нарушит контрольное условие и, следовательно, это приводит к возникновению декомпрессионного обязательства.
Другим важным аспектом является то, что и левый столбик 21 второй ткани пересек порог, однако во время обычного подъема такая ткань будет высвобождать количество инертного газа, достаточное для того, чтобы не нарушить контрольное условие.
Как показано на Фиг. 1f, в конце 30-минутного отрезка времени контрольное условие было нарушено пятью столбиками.
Первые две ткани, обе насыщенные при абсолютном давлении 4 атм, во время подъема будут высвобождать инертный газ в степени, достаточной для того, чтобы не нарушить контрольное условие.
Другими словами, при погружениях на глубину до 30 метров первые две ткани никогда не являются ограничивающим фактором.
Кроме того, следует отметить, что уменьшения глубины на 0,5 метров достаточно для первых двух тканей, чтобы они начали высвобождать инертный газ, что вполне логично, поскольку на глубине 30 метров они были фактически насыщенными, и любое снижение давления перемещает отрезок 25 ниже верхушки столбика 21.
На Фиг. 1g показан подъем до глубины первой глубокой остановки, обозначенной стрелкой 6: первые четыре ткани высвобождают инертный газ при значительном градиенте давления, на что указывает расстояние от верхушки столбика 21 до соответствующего горизонтального отрезка 25.
Пятый столбик 21 свидетельствует о том, что соответствующая ткань продолжает поглощать инертный газ, но при очень низком градиенте давления.
Только начиная с шестой ткани все еще имеет место значительный градиент давления, обуславливающий поглощение инертного газа.
Эта шестая ткань имеет полупериод 40 минут, и двухминутная остановка практически не влияет на ее состояние поглощения инертного газа.
Однако эта остановка на две минуты позволяет быстрым, и чувствительным, тканям высвободить значительное количество газа при относительно высоком давлении окружающей среды (2,6 атм), что позволяет контролировать и ограничивать рост микропузырьков в крови, если таковые имеются.
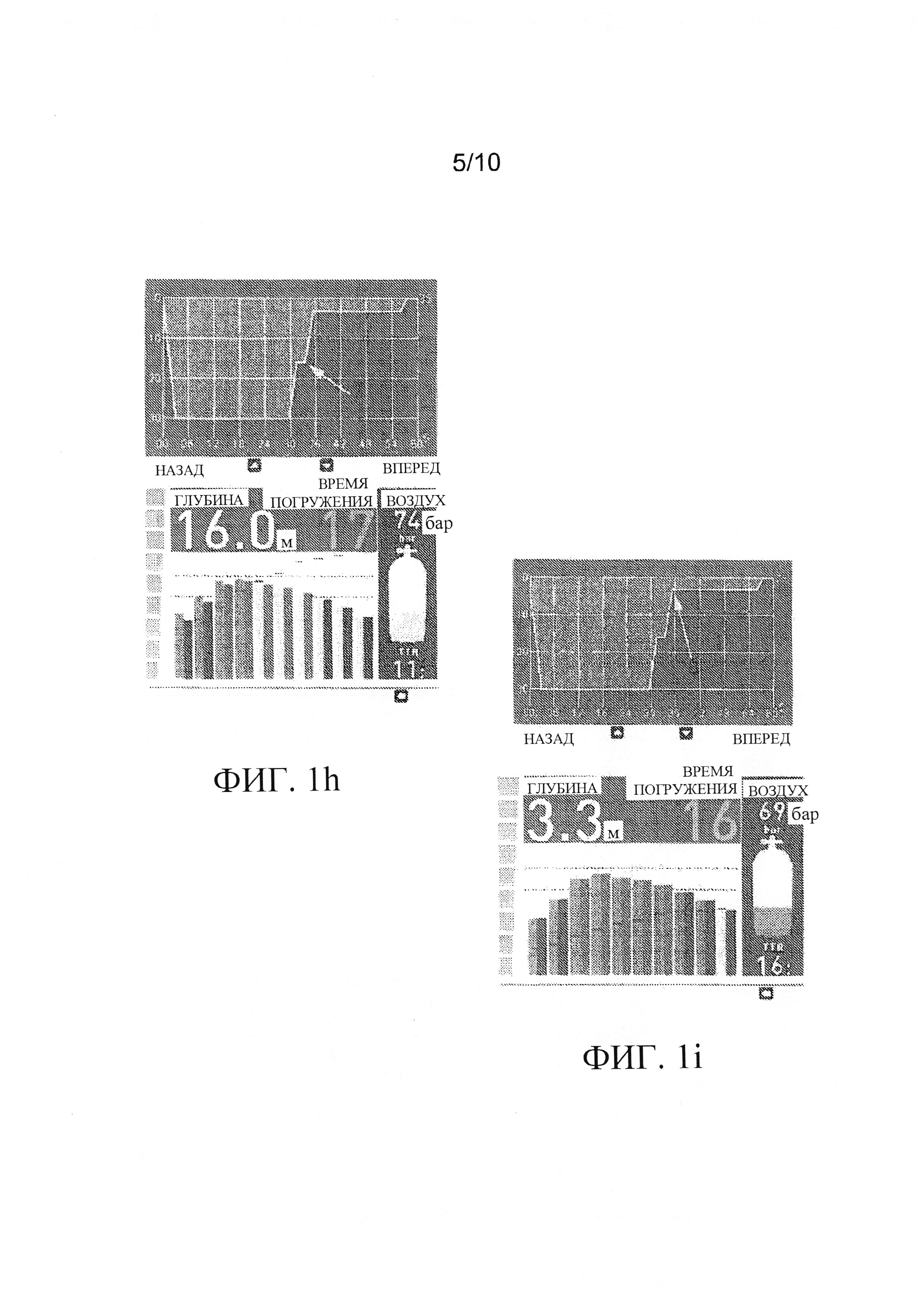
Это можно видеть на Фиг. 1h, на которой показана насыщенность тканей по завершении глубокой остановки: столбики 21 первых четырех тканей значительно уменьшились, тогда как столбики 21 остальных тканей не претерпели существенных изменений.
С точки зрения алгоритма декомпрессии, для этого профиля погружения глубокую остановку во время подъема можно рассматривать как желательную.
Теперь, обращаясь к глубине декомпрессионной остановки (см. Фиг. 1i), следует отметить, что все ткани, за исключением самых медленных, высвобождают инертный газ, и пять из них по-прежнему нарушают контрольное условие.
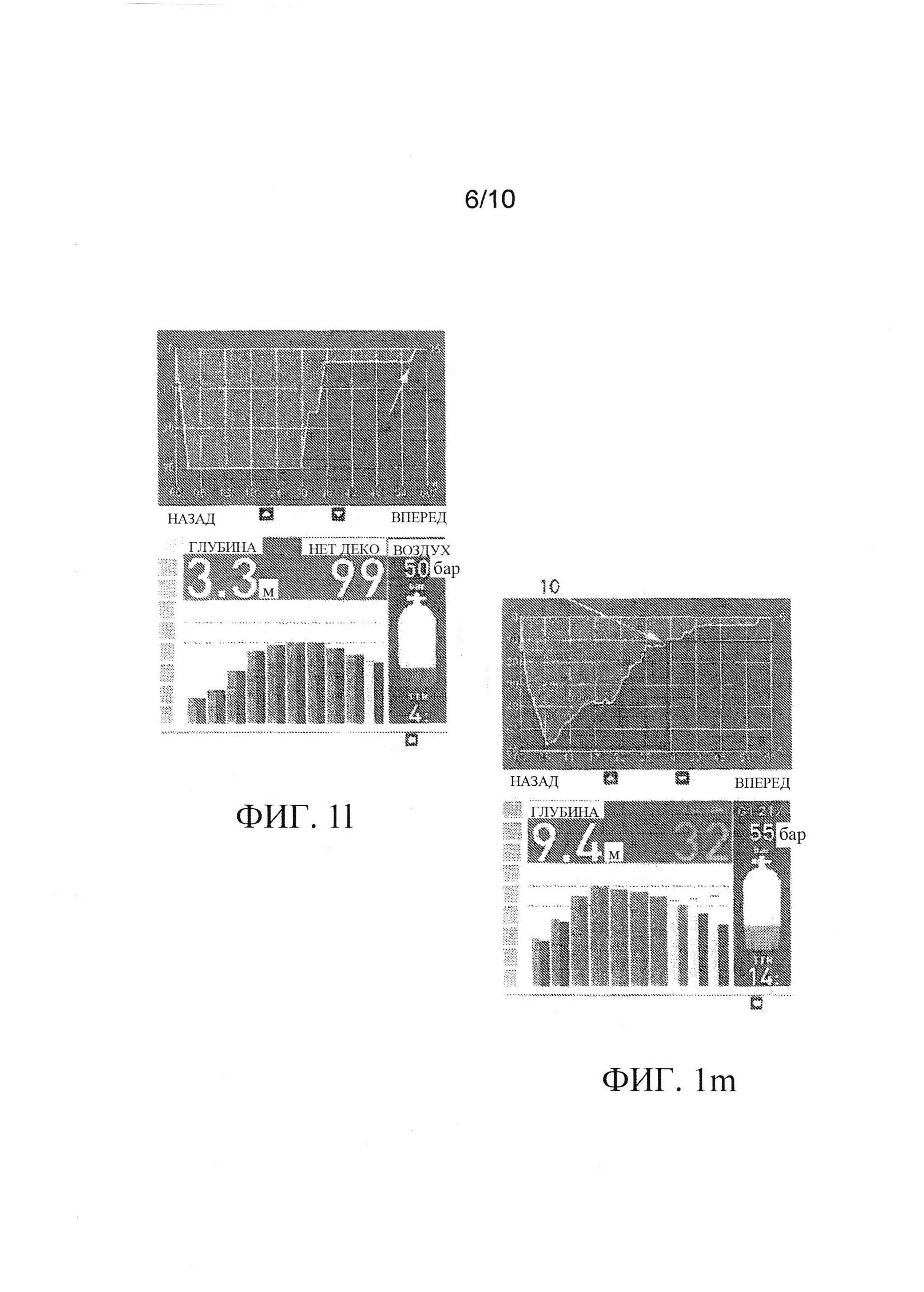
На Фиг. 1l показана ситуация по завершении декомпрессионного обязательства: столбики 22 всех тканей теперь ниже пороговой линии 23. Однако запас по безопасности отсутствует - для некоторых столбиков условие для безопасного подъема выполнено "впритык".
По этой причине всегда рекомендуется выполнять 3-5-минутную декомпрессионную остановку на глубине 3-5 метров даже после декомпрессионного погружения.
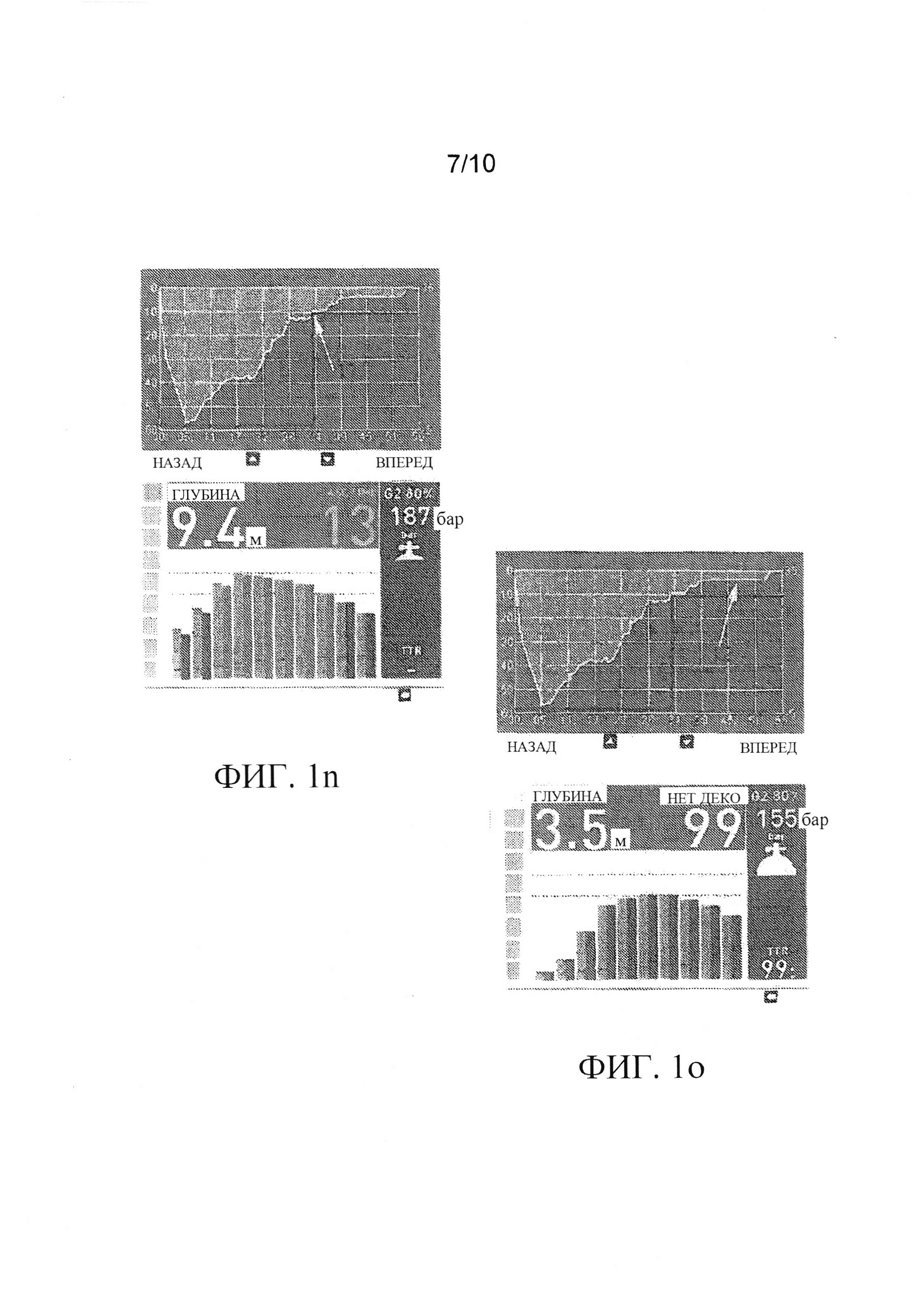
На Фиг. 1m и Фиг. 1n показана ситуация во время реального погружения, где была выполнена замена вдыхаемой газовой смеси с воздуха на 80%-ю кислородно-азотную смесь.
В частности, следует отметить различные положения горизонтального отрезка 25 непосредственно перед и сразу после замены смеси. Можно наглядно увидеть преимущества, которые обеспечивает применение смеси с высоким содержанием кислорода.
Кроме того, по этой причине способ оценки степени опасности погружения по настоящему изобретению предусматривает прекращение вычисления показателя степени опасности в случае такой замены вдыхаемой газовой смеси, которая сопровождается существенным уменьшением парциального давления азота.
Парциальное давление азота во вдыхаемой газовой смеси значительно уменьшается, и не только еще две ткани начинают высвобождать инертный газ вместо его поглощения, но и значительно увеличиваются градиенты давления, обуславливающие высвобождение инертного газа теми тканями, которые уже находились в состоянии высвобождения инертного газа.
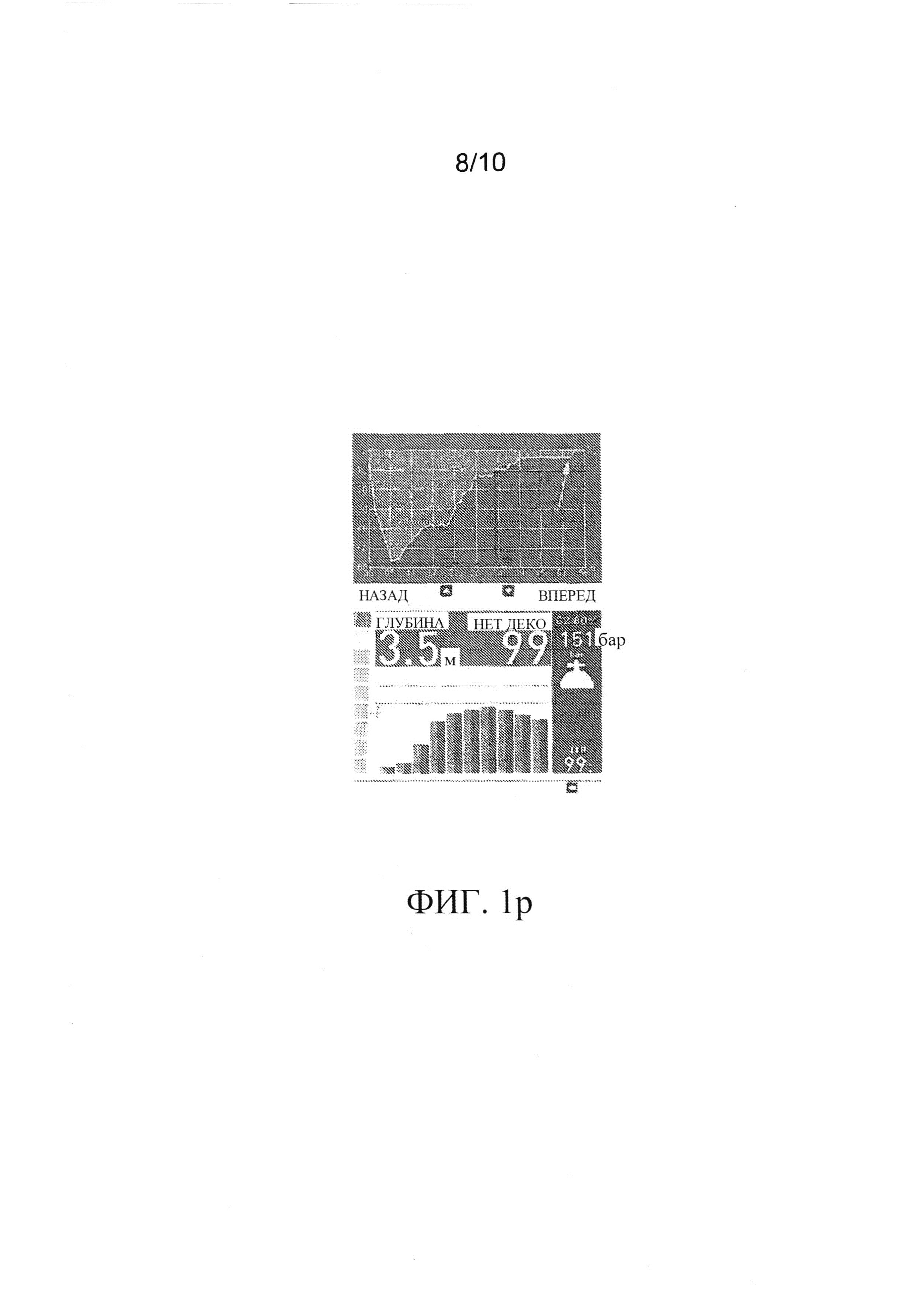
Для того же самого погружения на Фиг. 1o показано насыщение тканей в конце обязательной декомпрессии, и на Фиг. 1p показано такое насыщение пятью минутами позже.
Все столбики 21 и 22 уменьшились еще больше, и чем дальше они находятся от нижней горизонтальной линии 23, тем меньше риск развития декомпрессионной болезни.
Как упомянуто выше, вычисление показателя степени опасности погружения позволяет изменять поведение алгоритма декомпрессии в подводном компьютере на основе значений упомянутого показателя.
На практике, изменение порогового значения максимального переносимого перенасыщения в зависимости от показателя степени опасности погружения приводит к изменению положения по вертикали упомянутой нулевой линии, а также последующих трехметровой линии, шестиметровой линии и т.д.
Чем выше показатель степени опасности, тем сильнее уменьшаются пороговые значения, и тем ниже опускаются упомянутые линии, и, следовательно, тем более консервативным становится алгоритм. Такое опускание этих линий на протяжении погружения приводит, как упомянуто выше, к нелинейности алгоритма.
Изменение алгоритма декомпрессии может происходить автоматически, т.е. выполняют вычисление значения показателя степени опасности и параметры алгоритма автоматически пересчитываются.
Как альтернатива такому подходу или наряду с ним, можно предоставить водолазу возможность ручного изменения параметров алгоритма декомпрессии на основе вычисленных значений показателя степени опасности.
Для этого в соответствии с одним из вариантов осуществления настоящего изобретения подводный компьютер включает в себя интерфейс ввода/вывода, выполненный так, чтобы обеспечить водолазу возможность введения управляющих данных для изменения параметров алгоритма декомпрессии.
Такая особенность обеспечивает особенные преимущества в сочетании с предоставлением блоков управления, генерирующих сигналы оповещения при достижении показателем степени опасности погружения определенных значений.
Соответственно, водолаз будет оповещен, и тогда он сможет соответствующим образом изменить алгоритм.
Наконец, следует отметить, что такие блоки управления также могут обеспечивать генерирование акустических или визуальных сигналов оповещения при автоматическом изменении алгоритма: при каждом изменении алгоритма такие блоки управления генерируют сигнал, оповещающий водолаза о произошедшем изменении.
Как упомянуто выше, подводный компьютер по настоящему изобретению обеспечивает выполнение логической программы, которая в соответствии с одним из вариантов осуществления настоящего изобретения реализует алгоритм, выполняющий способ декомпрессии.
В соответствии с таким вариантом осуществления настоящего изобретения, способ декомпрессии включает следующие этапы:
f) определение множества биологических тканей, представляющих тело водолаза,
g) определение для каждой ткани значения полупериода и соответствующего порогового значения, где упомянутое значение полупериода определяет удельную скорость поглощения/высвобождения инертного газа соответствующей тканью, а упомянутое пороговое значение определяет такое максимальное значение давления, превышающее давление окружающей среды, которое соответствующая ткань способна переносить,
h) измерение продолжительности погружения,
i) определение профиля глубины погружения.
Кроме того, упомянутый способ предусматривает, что с увеличением значений продолжительности и/или глубины погружения уменьшается упомянутое пороговое значение и/или увеличивается значение полупериода для по меньшей мере одной ткани.
Этапы этого способа и пороговое значение уже были подробно описаны со ссылкой на Фиг. 1а-1р,; в частности, пороговое значение обозначено позицией 23.
На графике, приведенном на Фиг. 2, отображена упоминаемая выше нелинейность предлагаемого способа декомпрессии, а также проиллюстрировано сравнение способа по настоящему изобретению с известными способами предшествующего уровня техники.
Как можно заметить, на графике, приведенном на Фиг. 2, показано изменение степени опасности погружения с увеличением продолжительности погружения на постоянной глубине 39 м (левая вертикальная ось), а также изменение общего времени декомпрессии (правая вертикальная ось) в случае традиционного алгоритма со стандартным консервативным уровнем (Р0), в случае повышенного уровня безопасности (Р1 и Р2), и также в случае алгоритма, учитывающего степень опасности погружения в соответствии со способом по настоящему изобретению. Изменение показателя степени опасности (DSI) показано линией 31; при постоянной глубине DSI увеличивается пропорционально квадратному корню значения продолжительности погружения (следовательно, данная зависимость не является прямолинейной); изменение времени декомпрессии в соответствии с Р0, Р1 и Р2 представляет собой "прямую линию", тогда как изменение времени декомпрессии в соответствии со способом по настоящему изобретению является явно нелинейным.
Как можно видеть, линия, отображающая изменение времени декомпрессии в соответствии со способом по настоящему изобретению, характеризуется нелинейным подъемом, в отличие от остальных линий, полученных известными способами.
Это приводит к тому, что требуемое время декомпрессии (см. линия 32) увеличивается непропорционально как относительно увеличения продолжительности погружения, так и относительно увеличения показателя степени опасности (см. линия 31).
Реферат
Изобретение касается подводных погружений водолазов. Предложен способ оценки степени опасности подводного погружения, включающий вычисление показателя степени опасности погружения, которое осуществляют с помощью выполнения следующих этапов: a) определение состава газовой смеси, вдыхаемой водолазом; b) измерение продолжительности погружения; c) определение профиля глубины погружения; d) вычисление показателя степени опасности погружения как функции от результатов выполнения этапов a), b) и c); e) оценка степени опасности на основании результата вычисления показателя степени опасности погружения на этапе а); причем этапы a), b), c), d) и e) выполняют в режиме реального времени в каждый момент времени погружения водолаза и вычисление на этапе d) выполняют по следующей формуле: DSI=k*f(GAS)*f(D)*f(T), где DSI - показатель степени опасности погружения, k- произвольная постоянная, f(GAS) - функция от состава вдыхаемой газовой смеси, f(D) - функция от глубины погружения, f(Т) - функция от продолжительности погружения. Изобретение способствует повышению безопасности подводных погружений. 4 н. и 9 з.п. ф-лы, 17 ил.
Формула
Комментарии