Система и способ для контроля железнодорожного пути - RU2385446C2
Код документа: RU2385446C2
Чертежи















Описание
Перекрестная ссылка на родственную заявку
Эта заявка является непредварительной заявкой, испрашивающей приоритет на основе предварительной заявки США №60/584,769, под названием, "Система и способ для контроля железнодорожного пути," Джона Нагля (John Nagle) и Стивена Оррелла (Steven C. Orrell), поданной 30 июня 2004 г., включенной таким образом сюда посредством ссылки в полном объеме.
Область техники, к которой относится изобретение
Настоящее изобретение, в целом, относится к системе и способу для контроля железнодорожного пути и, в частности, к системе и способу для контроля параметров железнодорожного пути с использованием лазера, камеры и процессора.
Уровень техники
Железные дороги обычно строят на базовом слое уплотненного, раздробленного каменистого материала. Слой балластного гравия находится поверх этого слоя камня. Шпалы уложены в и на этот щебеночный слой, и два параллельных стальных рельса присоединены к шпалам крепежными деталями. Большинство используемых шпал сделаны из дерева. При производстве шпал используются различные другие материалы, например бетон, сталь и композитный или повторно используемый материал. Эти шпалы из альтернативных материалов составляют относительно малый процент всех шпал. Шпалы поддерживают колею или поперечное расстояние между рельсами. Шпалы распределяют нагрузку на оси от поездов на щебеночный слой под шпалами и способствуют амортизирующему действию всей структуры пути. С течением времени, факторы окружающей среды могут приводить к ухудшению шпал, пока их не придется заменить. Ежегодно, на железных дорогах Северной Америки заменяют до 2% или более всех деревянных шпал. Это составляет несколько миллионов шпал.
Для управления логистикой замены шпал и количественной оценки необходимости в новых шпалах, обходчики пути пытаются классифицировать состояние шпал и системы крепежа на регулярной основе. Эта классификация чаще всего осуществляется путем визуального контроля для выявления шпал и крепежных деталей, которые сгнили, разбиты, расщеплены или изношены до такой степени, что их срок службы близится к концу. Процесс визуального контроля занимает очень много времени. На практике контроль пути осуществляется обходчиком, идущим вдоль пути для контроля и регистрации состояния шпал и/или крепежных деталей, которые разнесены приблизительно на 20 дюймов вдоль пути. На одной конкретной североамериканской железной дороге было установлено, что команда из 3 или 4 человек может обследовать лишь от 5 до 7 миль пути в день.
Устройства для контроля рельсов известны из уровня техники, и программное обеспечение для анализа и организации данных, полученных с помощью таких устройств, известно из уровня техники. Например, Tielnspect® от ZETA-TECH Associates, Inc., Нью-Джерси представляет собой компьютеризованную систему контроля шпал, имеющую ручное устройство и программное обеспечение. Ручное устройство используется обходчиками при хождении по пути и обследовании пути, а программное обеспечение используется для анализа и организации данных, полученных с помощью устройства.
Помимо классификации шпал, другие компоненты пути нужно периодически проверять на износ и ухудшение характеристик. Это включает в себя износ рабочей поверхности рельса, целостность анкеров и крепежных деталей, выравнивание рельсовых подкладок, состояние щебеночного слоя и колеи между рельсами. Как и при классификации шпал, контроль этих параметров рельса также может занимать много времени. Из уровня техники известны системы для контроля рельсов. Например, omniSurveyor3D® от Omnicom Engineering, Соединенного Королевства, это система для обследования инфраструктуры железных дорог. Кроме того, ENSCO, Inc., Миннесота обеспечивает лазерную систему измерения колеи для измерения колеи между рельсами с использованием лазеров.
Настоящее изобретение направлено на преодоление или, по меньшей мере, ослабление влияния одной или нескольких из вышеописанных проблем.
Сущность изобретения
Раскрыты система и способ для контроля железнодорожного пути. Раскрытая система включает в себя лазеры, камеры и процессор. Лазеры располагаются рядом с путем. Лазер излучает пучок света от края до края железнодорожного пути, и камера захватывает изображения железнодорожного пути, на который падает пучок света. Процессор форматирует изображения, чтобы их можно было анализировать для определения различных измеримых параметров железнодорожного пути. Раскрытая система может включать в себя приемник GPS или дистанционное устройство для определения данных местоположения. Измеримые параметры, которые можно определять посредством раскрытой системы, включают в себя, но без ограничения: расстояние между шпалами, угол шпал относительно рельса, трещины и дефекты в поверхности шпал, отсутствующие рельсовые подкладки, невыровненные рельсовые подкладки, осевшие рельсовые подкладки, отсутствующие крепежные детали, поврежденные крепежные детали, невыровненные крепежные детали, изношенные или поврежденные изоляторы, износ рельсов, колея между рельсами, высота щебеночного слоя относительно шпал, размер щебня, и разрыв или разделение в рельсе. Система включает в себя один или несколько алгоритмов для определения этих измеримых параметров железнодорожного пути.
Вышеприведенная сущность не призвана охватывать все потенциальные варианты осуществления или все аспекты предмета настоящего раскрытия.
Краткое описание чертежей
Вышеприведенная сущность изобретения, предпочтительные варианты осуществления и другие аспекты настоящего раскрытия можно лучше понять из нижеследующего подробного описания конкретных вариантов осуществления, приведенного совместно с прилагаемыми чертежами, в которых:
Фиг.1 схематически иллюстрирует вариант осуществления раскрытой системы контроля;
Фиг.2 иллюстрирует участок варианта осуществления системы для контроля железнодорожного пути согласно некоторым принципам настоящего раскрытия;
Фиг.3 иллюстрирует иллюстративный кадр участка железнодорожного пути, полученный с помощью раскрытой системы контроля;
Фиг.4A-4C иллюстрируют иллюстративные кадры железнодорожного пути, полученные с помощью раскрытой системы контроля для определения расстояния между шпалами;
Фиг.5 иллюстрирует иллюстративный кадр железнодорожного пути, полученный с помощью раскрытой системы контроля для определения угла шпалы относительно рельса;
Фиг.6A-6C иллюстрируют иллюстративные кадры железнодорожного пути, полученные с помощью раскрытой системы контроля для определения разрыва или разделения в рельсе;
Фиг.7A-7B иллюстрируют иллюстративные кадры железнодорожного пути, полученные с помощью раскрытой системы контроля для определения износа рельса;
Фиг.8 иллюстрирует иллюстративный кадр железнодорожного пути, полученный с помощью раскрытой системы контроля для определения дефектов в шпале, расстояния между рельсами, размера шпал и высоты щебеночного слоя относительно шпалы;
Фиг.9 иллюстрирует иллюстративный кадр железнодорожного пути, полученный с помощью раскрытой системы контроля для определения приподнятого костыля;
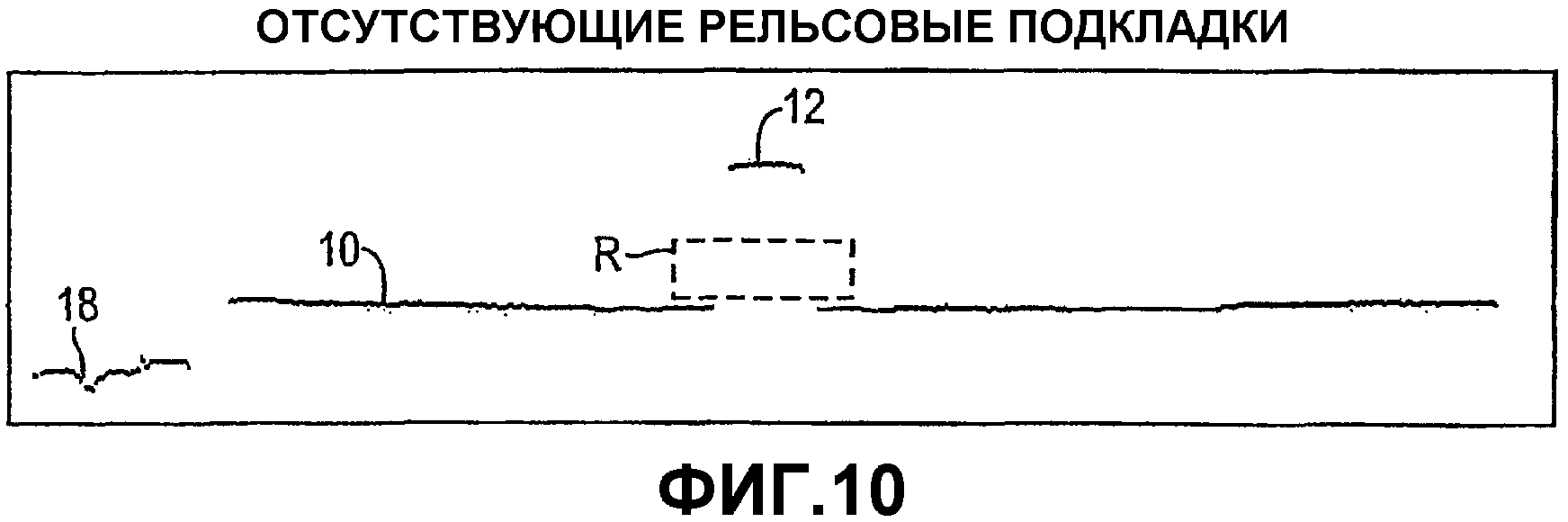
Фиг.10 иллюстрирует иллюстративный кадр железнодорожного пути, полученный с помощью раскрытой системы контроля для определения отсутствующей рельсовой подкладки;
Фиг.11 и 12 иллюстрируют трехмерные компиляции данных изображения, полученных с помощью раскрытой системы контроля;
Хотя раскрытые система и соответствующие способы контроля допускают различные модификации и альтернативные формы, конкретные варианты их осуществления были показаны в порядке примера на чертежах и подробно описаны в описании. Фигуры и письменное описание никоим образом не призваны ограничивать объем раскрытых идей изобретения. Напротив, фигуры и написанное описание обеспечены для иллюстрации раскрытых идей изобретения специалисту в данной области техники со ссылкой на конкретные варианты осуществления.
Подробное описание изобретения
На Фиг.1 и 2 показан вариант осуществления системы 30 для контроля железнодорожного пути согласно некоторым идеям настоящего раскрытия. На Фиг.1 раскрытая система контроля 30 схематически показана относительно железнодорожного пути. На Фиг.2 участок раскрытой системы контроля 30 показан в перспективе относительно железнодорожного пути.
Согласно Фиг.1, раскрытая система контроля 30 включает в себя источник света, например лазер 40, устройство для приема света, отраженного от контролируемой области, например камеру 50, и устройство обработки 60. В реализации, показанной на Фиг.1, раскрытая система контроля 30 используется для обследования полотна железнодорожного пути. Хотя раскрытые система и соответствующие способы контроля описаны применительно к использованию для контроля железнодорожного пути, из настоящего раскрытия явствует, что раскрытые систему и способ можно использовать в других областях и отраслях промышленности, где требуется контролировать поверхности или компоненты. Например, раскрытые систему и способ контроля можно использовать для контроля дорог, линий электропередачи, трубопроводов или других сетей или систем.
Полотно включает в себя шпалы 10, рельсы 12, рельсовые подкладки 14, костыли 16 и щебеночный слой 18. В общем случае лазер 40 проецирует пучок 42 лазерного света на полотно. Пучок 42 создает линию проекции L, показанную на Фиг.2, на полотне, которая следует контурам поверхностей и компонентов полотна. Приемник света, камера 50, захватывает изображение линии L лазерного света 42, спроецированной на полотно. Камера 50 передает захваченное изображение на устройство обработки 60 для обработки и анализа, что более подробно описано ниже.
Согласно Фиг.2, пары из лазера 40 и камеры 50 расположены над каждым из рельсов 12 пути. Лазеры 40 и камеры 50 могут быть собраны в жесткую конструкцию 32, которая может монтироваться на контрольном транспортном средстве (не показано) или другом устройстве, движущемся вдоль пути, для поддержания системы контроля 30 в правильном положении. На Фиг.2, для простоты, показан только участок конструкции 32. Однако очевидно, что другие известные компоненты конструкции 32 могут понадобиться для монтажа лазеров 40 и камер 50 на контрольном транспортном средстве.
В общем случае, контрольное транспортное средство может представлять собой любое подходящее средство передвижения для перемещения по железнодорожному пути. Например, в технике широко практикуется снабжение обычного дорожного транспортного средства, например грузовика, "рельсовым" шасси, смонтированным на раме автомобиля. Рельсовое шасси обычно включает в себя комплект маломерных железнодорожных запасных колес, которые позволяют дорожному транспортному средству ездить по рельсам. Согласно одному варианту осуществления, конструкцию 32 раскрытой системы контроля 30 можно монтировать на платформе грузовика, имеющего рельсовое шасси. Альтернативно, контрольное транспортное средство может представлять собой оборудование обслуживания пути (MoW), которое специально сконструировано для работы на железнодорожном пути. Кроме того, раскрытая система контроля 30 может быть смонтирована на шасси, которое буксируется транспортным средством, или может быть смонтирована на локомотиве или грузовом транспортном средстве.
Согласно Фиг.2, лазеры 40 проецируют пучки 42 света, имеющие заранее определенное угловое расхождение β. Угловые расхождения β двух лазеров 40 охватывают, по существу, всю поверхность полотна. Таким образом, лазеры 40 создают линию проекции L, которая является, по существу, прямой и проходит, по существу, от края до края. Каждый лазер 40, предпочтительно, создает пучок 42, имеющий угловое расхождение β около 60 градусов и охватывает приблизительно половину полотна. Предпочтительно, лазеры 40 проецируют пучок 42, по существу, перпендикулярно к поверхности пути. Альтернативно, можно использовать один лазер, расположенный так, чтобы создавать линию проекции L от края до края полотна.
Кроме того, лазеры 40, предпочтительно, являются инфракрасными лазерами, имеющими 4-ваттный оптический выход и генерирующими свет в инфракрасном диапазоне около 810 нм. Относительно высокий оптический выход лазеров 40 помогает ослаблять эффекты внешнего света без использования экранов. Подходящий лазер для раскрытой системы контроля 30 включает в себя лазер Magnum, производства Stacker Yale. Вышеописанные параметры лазеров 40 предпочтительны для контроля поверхности железнодорожного пути. Другие реализации раскрытой системы контроля 30 могут использовать альтернативные количества источников света, а также другие длины волны, оптические выходы и угловые расхождения.
Согласно Фиг.2, камеры 50 расположены рядом с лазерами 40. Согласно Фиг.1, камеры 50 установлены под углом θ относительно пучка 42 света, проецируемого из лазеров 40. Согласно одному варианту осуществления, камеры расположены под углом θ около 60 градусов. Когда раскрытая система контроля 30 перемещается вдоль пути, камеры 50 захватывают изображение или кадр полотна с малыми, регулярными приращениями. Предпочтительно, камеры 50 способны осуществлять съемку с весьма высокой частотой кадров, например около 5405 кадров в секунду.
Каждое неподвижное изображение или кадр, захваченное(ый) камерами 50, затем фильтруется и обрабатывается для изоляции оконтуренной лазерной линии L, спроецированной на полотно. Камеры 50 снабжены полосовыми фильтрами 52, которые пропускают только лучистую энергию лазеров 40, по существу, в предпочтительном инфракрасном диапазоне. Поскольку длина волны лазеров 40 составляет около 810 нм, полосовые фильтры 52 камер 50 могут устранять, по существу, весь внешний свет, так что камера 50 улавливает, по существу, чистое, неподвижное изображение линии проекции L света от лазеров 40.
Каждая из двух камер 50 передает данные изображения непосредственно на устройство обработки или компьютер 60 по линиям связи. Предпочтительно, камера 50 включает в себя процессор 54, способный преобразовывать или форматировать захваченное изображение линии проекции L в пространственный профиль, который передается непосредственно на устройство обработки или компьютер 60. Способность камеры 50 обрабатывать или форматировать захваченное изображение подобным образом позволяет исключить необходимость в дорогостоящих пост-процессорах или высокоскоростных механизмах захвата кадров. Подходящая камера для раскрытой системы контроля 30, имеющая такие возможности обработки, включает в себя Ranger M50 производства IVP Integrated Vision Products, Inc.
Помимо других общих компонентов, устройство обработки или компьютер 60 включает в себя микропроцессор, устройства ввода, вывода и устройство 62 хранения данных. Устройство 62 хранения данных может включать в себя жесткий диск, энергонезависимый носитель данных, флэш-память, ленту или CD-ROM. Устройство 60 обработки может дополнительно включать в себя устройство ввода/отображения 68, позволяющее путевому обходчику вводить и просматривать данные и оперировать раскрытой системой контроля 30. Устройство 60 обработки работает с подходящими программами для сохранения и анализа различных данных, полученных с помощью раскрытой системы контроля 30. Например, устройство 60 обработки может иметь любое подходящее программное обеспечение для обработки изображений, например, Matrox MIL, Common VisionBlox, Labview, eVision, Halcon, и IVP Ranger. Например, устройство 60 обработки может иметь инструменты обработки изображений, известные из уровня техники, для анализа данных изображения, полученных от камер 50, например, инструменты «Интересующая область» (ROI), инструменты фильтрации, инструменты больших двоичных объектов, искатели краев, инструменты построения гистограмм и пр.
Для эффективной обработки всех данных, полученных с помощью раскрытой системы контроля 30, устройство 60 обработки, согласно предпочтительному варианту осуществления, включает в себя компьютер, имеющий быстродействующий процессор, например процессор Intel Pentium 4 с тактовой частотой 2,8 GHz. Для эффективного хранения всех данных, полученных с помощью раскрытой системы контроля 30, устройство 62 хранения, предпочтительно, включает в себя два жестких диска большой емкости, сконфигурированных для использования одновременно обоих механизмов чтения/записи как один привод, что также известно под названием системы избыточного массива независимых дисков (RAID). Быстродействующий процессор устройства 60 обработки и сдвоенные жесткие диски устройства 62 хранения обеспечивают непрерывное оперативное хранение данных, полученных с помощью раскрытой системы контроля 30. Согласно предпочтительному варианту осуществления, питание для раскрытой системы контроля 30 может обеспечиваться от источника переменного тока 110 В в виде генератора с ременным приводом, присоединенным непосредственно к двигателю контрольного транспортного средства.
Когда пучки 42 проецируются на неправильную поверхность пути и наблюдаются под углом, линия проекции L, показанная на Фиг.2, повторяет контуры поверхности и компонентов полотна. Иллюстративное изображение или кадр, демонстрирующий линию проекции L полотна, показан на Фиг.3. Данные или кадр изображения включает в себя совокупность пикселей, заданных в координатах X-Y и демонстрирует контур полотна, захваченный камерами 50. Благодаря фильтрации и других методов обработки изображений, известных из уровня техники, изображение включает в себя два пиксельных значения, где темные пиксели представляют контур полотна. Каждый пиксель определенных данных изображения имеет одну и ту же координату Z, которая выражает конкретную позицию вдоль пути, в которой были захвачены данные изображения. Подобным образом, совокупность захваченных изображений создает трехмерный снимок полотна, в котором каждое изображение снимка имеет координаты X-Y, показывающие контур полотна, и имеет координату Z, выражающую конкретную позицию контура вдоль рельса.
Очевидно что скорость захвата изображений ограничивается шириной и высотой сканируемой области, расстоянием между дискретными неподвижными изображениями, разрешением неподвижных изображений, максимальной частотой кадров камер 50, скоростью обработки компьютера 60 и скоростью записи устройства 62 хранения данных. Для применения раскрытой системы контроля 30 к железным дорогам, в порядке предпочтительного примера, расстояние между неподвижными изображениями или кадрами, захваченными камерами 50, составляет около 0,1 дюйма, предпочтительная скорость контрольного транспортного средства составляет около 30 миль в час, предпочтительная высота сканируемой области составляет около 10 дюймов, и предпочтительная ширина сканируемой области составляет около 10 футов по ширине полотна. Для обеспечения этих предпочтительных параметров предпочтительны система камер, имеющая частоту кадров около 5405 кадров в секунду, и компьютерная система со скоростью обработки и записи около 8,3 мегабит в секунду. Для сохранения каждого кадра или изображения, например, показанного на Фиг.3, может потребоваться около 1,536 байт. При захвате кадров примерно через каждые 0,1 дюйма вдоль пути, примерно 633,600 кадров будет захватываться на протяжении одной мили пути, и для их хранения потребуется 0,973 гигабайт.
Согласно другому варианту осуществления, показанному на Фиг.1, раскрытая система контроля 30 может дополнительно включать в себя приемник 64 Глобальной системы позиционирования (GPS) для получения географических местоположений контрольного транспортного средства при контролировании железнодорожного пути. Приемник 64 GPS может включать в себя любой подходящий приемник GPS, известный из уровня техники, для получения географических местоположений. Например, приемник 64 GPS может быть независимым, коммерчески доступным устройством, установленным на контрольном транспортном средстве и подключенным к устройству 60 обработки с помощью подходящего кабельного соединения и интерфейса ввода/вывода. Приемник 64 GPS может получать географическое местоположение с использованием дифференциальной или недифференциальной системы GPS. Методы получения, по существу, точных данных местоположения и времени с помощью приемника 64 GPS хорошо известны из уровня техники и далее рассматриваться не будут. Географические местоположения передаются на устройство 60 обработки и могут компилироваться с данными изображения полотна.
При записи данных изображения от камер 50 также можно записывать географическое местоположение кадра. Исключая непрерывный поток данных географического местоположения от приемника 64 GPS на компьютер 60, можно освободить время обработки процессора для захвата данных изображения с помощью устройства 60 обработки. Поэтому приемник 64 GPS, предпочтительно, выдает данные на вспомогательный модуль 65. Вспомогательный модуль 65 упаковывает эти данные и передает их на устройство обработки или компьютер 60 по мере необходимости. Помимо получения данных географического местоположения, приемник 64 GPS может получать данные времени. Кроме того, данные местоположения и времени, полученные с помощью приемника 64 GPS, можно использовать для определения других переменных, например, скорости контрольного транспортного средства, которые можно использовать в различных раскрытых здесь целях. Таким образом, раскрытая система контроля 30 может использовать данные от приемника 64 GPS для запуска камеры 50 для захвата неподвижного изображения полотна примерно через каждые 0,1 дюйма вдоль рельса.
Согласно альтернативному варианту осуществления, показанному на Фиг.1, раскрытая система контроля 30 может включать в себя дистанционное устройство 66 для получения географических местоположений контрольного транспортного средства при контролировании рельса. Дистанционное устройство 66 может представлять собой кодер, который отсчитывает обороты колеса или частичные обороты, когда контрольное транспортное средство движется вдоль рельса, или может представлять собой существующий датчик пройденного пути на контрольном транспортном средстве. Дистанционное устройство 66 может выдавать данные местоположения на устройство 60 обработки. С использованием дистанционного устройства 66, раскрытая система контроля 30 может запускать камеру 50 для захвата неподвижного изображения полотна примерно через каждые 0,1 дюйма вдоль рельса.
Согласно еще одному варианту осуществления, раскрытая система контроля 30 может захватывать неподвижные изображения полотна на или вблизи максимальной частоты кадров камер 50 без запуска посредством приемника 64 GPS или дистанционного устройства 66. Например, камеры 50 и устройство 60 обработки могут работать на или вблизи максимальной частоты кадров, когда контрольное транспортное средство движется вдоль пути. С использованием известной средней ширины шпалы 10 или рельсовой подкладки 14 раскрытая система контроля 30 может вычислять скорость контрольного транспортного средства. Раскрытая система может затем удалять любые дополнительные кадры для сокращения хранилища данных, так что оставшиеся кадры будут иметь приблизительный разнос 0,1 дюйма. Очевидно, что разнос в точности 0,1 дюйма не всегда возможен, но разнос будет известен и может составлять от 0,05'' до 0,1''. В этом варианте осуществления одно и то же количество кадров нужно отбрасывать между каждым оставшимся кадром на данной шпале, так что разнос между кадрами остается постоянным. Например, если ширина рельсовых подкладок известна и составляет 8 дюймов, и для конкретной рельсовой подкладки захватываются 244 кадра, то два кадра можно отбросить каждым оставшимся кадром. Если весь набор кадров пронумерован от 1 до 244, то оставшиеся кадры будут иметь номера: 1, 4, 7, 10, … 241, 244. Оставшиеся 82 кадра будут иметь расчетный разнос 0,098 дюйма.
Альтернативно, раскрытая система может производить интерполяцию между любыми двумя захваченными кадрами для создания нового третьего кадра в любом нужном месте вдоль пути. Некоторые кадры затем можно отбросить для достижения точного желаемого разноса между кадрами.
После того, как раскрытая система контроля 30 завершит обследование железнодорожного пути, осуществляется компьютерный анализ данных изображения. Компьютерный анализ может осуществляться устройством обработки или компьютером 60, размещенным в контрольном транспортном средстве. Альтернативно, компьютерный анализ может осуществляться другой компьютерной системой, имеющей программное обеспечение для обработки изображений, известное из уровня техники. Компьютерный анализ предусматривает поиск данных изображения и определение или обнаружение мест вдоль пути, где имеются дефекты или где нарушены допустимые допуски железнодорожного пути. Для конкретной реализации компьютерный анализ можно настраивать или изменять. Географические местоположения дефектов или недопустимых допусков могут обеспечиваться так, чтобы можно было производить соответствующие ремонтные работы или планировать соответствующее обслуживание.
Множество измеримых параметров железнодорожного пути можно определять или обнаруживать из данных изображения полотна, полученных с помощью раскрытых системы контроля и соответствующих способов. В нижеприведенных примерах рассмотрен ряд таких измеримых параметров и раскрыты различные методы анализа измеримых параметров. Очевидно, что эти и другие измеримые параметры железнодорожного пути можно определять или обнаруживать из данных изображения полотна, полученных с помощью раскрытой системы контроля. Кроме того, очевидно, что другие методы анализа данных изображения, известные из уровня техники, можно использовать с раскрытыми системой и соответствующими способами контроля. Соответственно, раскрытые система и соответствующие способы контроля не следует ограничивать описанными здесь измеримыми параметрами и конкретными методами.
Для ясности, на Фиг.11 и 12 показаны иллюстративные компиляции данных изображения, полученных с помощью раскрытой системы контроля и соответствующих способов. На Фиг.11 показана совокупность компилированных данных изображения, демонстрирующая участок шпалы, рельсовой подкладки и рельса в перспективе. На Фиг.12 показана совокупность компилированных данных изображения, демонстрирующая более детальный вид в перспективе. Согласно Фиг.11-12, компилированные данные изображения образуют трехмерное представление (X, Y и Z) области полотна. Представление имеет существенную степень детализации, и различные параметры компонентов полотна можно измерить. Например, на Фиг.11-12 видны трещины и расщепления в шпале 10. Кроме того, видна высота шпалы 10 относительно щебеночного слоя 18. Видны ориентация и высоты рельсовой подкладки 14 и рельса 12. Эти и другие детали можно получать с помощью раскрытой системы контроля и соответствующих способов, что более подробно описано ниже.
В одном примере, расстояние между шпалами можно определять из совокупности данных изображения. На Фиг.4A-4C показаны иллюстративные кадры полотна, полученные с помощью раскрытой системы контроля 30, которые можно использовать для определения расстояния между шпалами 10. На Фиг.4A показан конечный кадр F1, имеющий контур первой шпалы 10, которая находится в позиции Z1 вдоль пути. Этот конечный кадр F1 может означать последний кадр, показывающий эту шпалу 10. На Фиг.4B показан промежуточный кадр F2, захваченный некоторое время спустя после конечного кадра F1 и в другой позиции Z2 вдоль пути. В этом промежуточном кадре F2 недостает шпалы, поскольку он указывает положение между шпалами пути. Очевидно, что совокупность таких промежуточных кадров будет следовать за конечным кадром F1, показанным на Фиг.4A. На Фиг.4C показан конечный кадр F3, имеющий другую шпалу 10', которая находится в другой позиции Z3 вдоль пути. Компьютерный анализ позволяет определять расстояние между шпалами 10 и 10', например, сначала подсчитав количество таких промежуточных кадров F2, где недостает шпалы. Это количество промежуточных кадров F2 затем можно умножить на известный разнос между кадрами (например, 0,1 дюйма) для вычисления расстояния между шпалами 10 и 10'. Таким образом, можно получить, по существу, точное измерение между шпалами полотна, при этом путевому обходчику не нужно физически контролировать шпалы. Вместо этого используются данные изображения, образующие трехмерный снимок полотна.
Определение того, имеет ли кадр шпалу, можно осуществлять методами построения изображений, известными из уровня техники. Например, согласно Фиг.4A-4C, контур шпалы 10 ожидается в интересующей области R кадров F1-F3. Компьютерный анализ позволяет искать интересующую область R кадра для пикселей, указывающих наличие шпалы. Для этого можно, например, усреднить или суммировать значения пикселей в интересующей области R. Поскольку контур шпалы состоит из темных пикселей, интересующая область R в кадре F1, имеющем шпалу 10, будет иметь большую величину среднего или суммы, чем область R в промежуточном кадре F2, где недостает шпалы.
В другом примере из данных изображения можно определять углы шпал относительно рельса. На Фиг.5 показан иллюстративный кадр железнодорожного пути, полученный с помощью раскрытой системы контроля. Угловую ориентацию головок рельсов 12 можно представить линией L1. Линию L1 можно оценить, например, методами наилучшего совпадения или аппроксимации кривой, известными из уровня техники. Аналогично, угловую ориентацию шпалы 10 можно представить линией L2. Линию L2 также можно оценить, например, методами наилучшего совпадения или аппроксимации кривой, известными из уровня техники. Эти линии L1 и L2 можно усреднить из нескольких кадров по оси Z вблизи шпалы 10. Затем компьютерный анализ позволяет определить угловое соотношение между этими линиями L1-L2 для определения углов шпал относительно рельса. Это состояние будет указывать состояние либо изношенного рельса, либо разбитой подкладки на деревянной шпале.
В другом примере из данных изображения можно определять разрыв в рельсе. На Фиг.6A-6C показаны иллюстративные кадры F1-F3 железнодорожного пути, полученные с помощью раскрытой системы контроля, которые можно использовать для определения разделения рельса 12. На Фиг.6A показан конечный кадр F1, имеющий конец первого рельса 12, который находится в позиции Z1 вдоль пути. Этот конечный кадр F1 означает последний кадр, показывающий этот рельс 12. На Фиг.6B показан промежуточный кадр F2, захваченный некоторое время спустя после конечного кадра F1 и в другой позиции Z2 вдоль пути. В этом промежуточном кадре F2 недостает рельса, поскольку он представляет место между рельсами пути. Очевидно, что совокупность таких промежуточных кадров F2 будет следовать за конечным кадром F1, показанным на Фиг.6A. На Фиг.6C показан еще один конечный кадр F3, имеющий другой рельс 12', который находится в другой позиции Z3 вдоль пути. Компьютерный анализ позволяет определять расстояние между рельсами 12 и 12', например, посчитывая сначала количество промежуточных кадров F2, где недостает рельса. Это количество промежуточных кадров F2 затем можно умножить на известный разнос между кадрами (например, 0,1 дюйма) для вычисления расстояния между рельсами 12 и 12'.
Определение, имеет ли кадр рельс 12, можно осуществлять методами построения изображений, известными из уровня техники. Например, согласно Фиг.6A-6C, контур рельса 12 ожидается в интересующей области R кадров F1-F3. Компьютерный анализ позволяет искать интересующую область R кадра для пикселей, указывающих наличие контура рельса. Для этого можно, например, усреднить или суммировать значения пикселей в интересующей области. Поскольку контур рельса состоит из темных пикселей, интересующая область R в кадре F1, имеющем рельс 12, будет иметь большую величину среднего или суммы, чем область R в промежуточном кадре F2, где недостает рельса.
В другом примере, из данных изображения можно определять износ рельсов. На Фиг.7A-7B показаны иллюстративные кадры F1-F2 железнодорожного пути, полученные с помощью раскрытой системы контроля, и их можно использовать для определения износа рельса 12. Компьютерный анализ может определять, изношен ли рельс 12, например, определяя, меньше ли расстояние между контуром рельса 12 и опорной точкой в кадре, чем то же расстояние в предыдущем кадре. На Фиг.7A показан кадр F1, имеющий рельс 12, который находится в позиции Z1 вдоль пути. Контур рельса 12 лежит в интересующей области R и на уровне L вдоль оси Y кадра F1. Контур рельса 12 находится над опорным уровнем L2, в качестве которого может выступать высота рельсовой подкладки, измеримое расстояние LD. Из настоящего раскрытия специалистам в данной области ясно, что опорный уровень L2 может находиться в нескольких опорных точках, например, рельсовых подкладках 14, костылях 16 или шпалах 10. На Фиг.7B показан еще один кадр F2 в другой позиции Z2 вдоль пути. В позиции Z2 расстояние LD между контуром рельса 12 и уровнем L2 меньше, чем в позиции Z1. Таким образом, кадр F2 может указывать износ рельса 12 в позиции Z2 вдоль пути. Из настоящего раскрытия специалистам в данной области ясно, что износ рельсов также можно определять, сравнивая кадры, взятые в разные моменты времени, но в одной и той же позиции вдоль полотна.
В другом примере из данных изображения можно определять дефекты в шпалах 10. На Фиг.8 показан иллюстративный кадр железнодорожного пути, полученный с помощью раскрытой системы контроля. Дефекты D и D' показаны в шпале 10. Компьютерный анализ позволяет обнаруживать, имеет ли шпала 10 дефект, например, определяя, лежат ли участки D контура шпалы вне интересующей области R, или отсутствуют ли участки D' контура в области R. Как показано, дефекты в шпале могут включать в себя трещины, расщепления или разрывы в шпалах. С использованием совокупности данных изображения вблизи такого дефекта компьютерный анализ может определять ширину и длину дефекта. Например, согласно Фиг.11-12, совокупность данных изображения можно использовать для оценивания ширины W и длины L трещины, показанной на краю шпалы. В некоторых случаях компьютерный анализ может определять глубину дефекта, например, когда ориентация дефекта позволяет свету лазера проецироваться в дефект и захватываться камерой. Согласно одному варианту осуществления угол между лазером и камерой может быть сравнительно малым, так что свет, проецирующийся в углубленный дефект, все же может захватываться камерой, расположенной почти параллельно пучку лазерного света.
В другом примере, из данных изображения можно определять расстояние или колею между рельсами или длину шпал. Согласно Фиг.8, метод обнаружения края, известный из уровня техники, можно использовать для отыскания краев контуров рельса 12 в кадре, и расстояние W1 между краями можно вычислять для оценивания расстояния между рельсами 12. Аналогично, метод обнаружения края, известный из уровня техники, можно использовать для отыскания краев контура шпалы 10 в кадре, и расстояние W1 между краями можно вычислять для оценивания ширины W2 шпалы 10.
В другом примере, из данных изображения можно определять высоту щебеночного слоя 18 относительно шпалы 10. Согласно Фиг.8, методом линейной аппроксимации можно определять уровень щебеночного слоя 18 и уровень шпалы 10, и из разности между этими уровнями можно оценивать высоту HB щебеночного слоя 18 относительно шпалы 10. В другом примере снимки железнодорожного пути можно использовать для определения размера камней в щебеночном слое 18. Для этого можно анализировать интересующую область, имеющую щебеночный слой 18, и оценивать размеры камней щебеночного слоя с использованием значений кривизны в контуре щебеночного слоя 18.
В другом примере из данных изображения можно обнаруживать выступающие костыли. На Фиг.9 показан иллюстративный кадр железнодорожного пути, полученный с помощью раскрытой системы контроля. Для определения того, имеется ли выступающий костыль, интересующую область R можно анализировать для определения, имеется ли в области R участок контура, представляющий выступающий костыль 16.
В других примерах из данных изображения можно обнаруживать отсутствующие рельсовые подкладки, невыровненные рельсовые подкладки или осевшие рельсовые подкладки. На Фиг.10 показан иллюстративный кадр железнодорожного пути, полученный с помощью раскрытой системы контроля. Отсутствующую или осевшую рельсовую подкладку можно обнаруживать, например, анализируя интересующую область R и определяя, имеется ли участок контура, представляющий рельсовую подкладку в области R. Невыровненную рельсовую подкладку можно определять, осуществляя линейную аппроксимацию участка контура рельсовой подкладки и сравнивания, например, ориентацию линии с ориентацией шпалы.
Вышеприведенное описание предпочтительных и других вариантов осуществления не призвано ограничивать объем применимости идей изобретения, выдвинутых заявителем. Вместо раскрытия содержащихся здесь идей изобретения, заявитель испрашивает все права на патент, предоставляемые прилагаемой формулой изобретения. Поэтому подразумевается, что раскрытые система и соответствующие способы контроля включают в себя все модификации и изменения, полностью отвечающие объему нижеследующей формулы изобретения или ее эквивалентов.
Реферат
Изобретение относится к системе и способу контроля железнодорожного пути, в частности к системе и способу контроля параметров железнодорожного пути с использованием лазера, камеры и процессора. Технический результат изобретения заключается в упрощении процедуры контроля состояния железнодорожного полотна. Способ контроля железнодорожного пути содержит этапы, на которых: освещают линию от края до края железнодорожного пути; принимают часть света, отраженного от железнодорожного полотна; генерируют совокупность изображений; анализируют совокупность изображений; компилируют совокупность изображений; записывают соответствующее географическое местоположений изображений; отображают физические характеристики участка железнодорожного пути. Система, реализующая способ контроля железнодорожного пути, подлежащая установке на транспортном средстве, содержит: по меньшей мере, один источник света, являющийся лазером, расположенный рядом с железнодорожным путем для проецирования пучка света от края до края железнодорожного полотна, один оптический приемник, расположенный рядом с железнодорожным путем. При этом оптический приемник содержит цифровую камеру, один процессор для анализа совокупности изображений и определения географического местоположения совокупности изображений. Причем процессор выполнен с возможностью компилирования совокупности изображения и записи соответствующего географического местоположения совокупности изображений. 4 н. и 66 з.п. ф-лы, 17 ил.
Формула
по меньшей мере, один источник света, расположенный рядом с железнодорожным путем для проецирования пучка света от края до края железнодорожного полотна,
по меньшей мере, один оптический приемник, расположенный рядом с железнодорожным путем, для приема, по меньшей мере, части света, отраженного от железнодорожного полотна, и генерации совокупности изображений, представляющих профиль, по меньшей мере, участка железнодорожного полотна, и
по меньшей мере, один процессор для анализа совокупности изображений и определения географического местоположения совокупности изображений, причем процессор дополнительно выполнен с возможностью компилирования совокупности изображений с одной или более соответствующими физическими характеристиками, и записи соответствующего географического местоположения совокупности изображений.
анализируют один или более промежуточных кадров и конечный кадр совокупности изображений, причем конечный кадр содержит шпалы, тогда как один или более промежуточных кадров с отсутствием шпал;
определяют количество из одного или более промежуточных кадров с отсутствием шпал;
определяют известный интервал между кадрами; и
определяют расстояние между шпалами конечного кадра, на основании количества из одного или более промежуточных кадров с отсутствием шпал и известного интервала между кадрами.
анализируют кадр совокупности изображений, причем кадр содержит интересующую область;
определяют содержит ли интересующая область рельсовую подкладку;
определяют контур шпалы и контур рельсовой подкладки, в случае предоставления рельсовой подкладки;
сравнивают ориентацию контура шпалы и ориентацию контура рельсовой подкладки; и
определяют на основании сравнения, является ли рельсовая подкладка невыровненной или осевшей.
анализируют один или более промежуточных кадров и конечный кадр совокупности изображений, причем конечный кадр содержит рельсы, тогда как один или более промежуточных кадров с отсутствием рельс;
определяют количество из одного или более промежуточных кадров с отсутствием рельс;
определяют известный интервал между кадрами; и идентифицируют разрыв в рельсе на основании количества из одного или более промежуточных кадров с отсутствием рельс и известного интервала между кадрами.
a) освещают линию от края до края железнодорожного полотна,
b) принимают, по меньшей мере, часть света, отраженного от железнодорожного полотна,
c) генерируют совокупность изображений, представляющих профиль, по меньшей мере, участка железнодорожного полотна, и
d) анализируют совокупность изображений и определяют географическое местоположение совокупности изображений по железнодорожному полотну;
e) компилируют совокупность изображений с одной или более соответствующими физическими характеристиками железнодорожного полотна;
f) записывают соответствующее географическое местоположение изображений; и
g) отображают определенные физические характеристики упомянутого железнодорожного полотна.
анализируют один или более промежуточных кадров и конечный кадр совокупности изображений, причем конечный кадр содержит шпалы, тогда как один или более промежуточных кадров с отсутствием шпал;
определяют количество из одного или более промежуточных кадров с отсутствием шпал;
определяют известный интервал между кадрами; и определяют расстояние между шпалами конечного кадра, на основании количества из одного или более промежуточных кадров с отсутствием шпал и известного интервала между кадрами.
анализируют кадр совокупности изображений, причем кадр содержит интересующую область;
определяют содержит ли интересующая область рельсовую подкладку;
определяют контур шпалы и контур рельсовой подкладки, в случае предоставления рельсовой подкладки;
сравнивают ориентацию контура шпалы и ориентацию контура рельсовой подкладки; и
определяют на основании сравнения, является ли рельсовая подкладка невыровненной или осевшей.
анализируют один или более промежуточных кадров и конечный кадр совокупности изображений, причем конечный кадр содержит рельсы, тогда как один или более промежуточных кадров с отсутствием рельс;
определяют количество из одного или более промежуточных кадров с отсутствием рельс;
определяют известный интервал между кадрами; и идентифицируют разрыв в рельсе на основании количества из одного или более промежуточных кадров с отсутствием рельс и известного интервала между кадрами.
a) перемещаются вдоль рельсов,
b) проецируют сфокусированный пучок света от края до края железнодорожного полотна,
c) захватывают совокупность изображений сфокусированного пучка света, проецируемого от края до края железнодорожного полотна при перемещении вдоль рельсов,
d) определяют один или более параметров участка железнодорожного полотна путем обработки совокупности изображений;
e) компилируют соответствующие изображения участка железнодорожного полотна с соответствующими физическими характеристиками железнодорожного полотна;
f) записывают соответствующее географическое местоположение соответствующих изображений;
g) выводят определенные один или более параметров участка железнодорожного полотна.
анализируют один или более промежуточных кадров и конечный кадр совокупности изображений, причем конечный кадр содержит шпалы, тогда как один или более промежуточных кадров с отсутствием шпал;
определяют количество из одного или более промежуточных кадров с отсутствием шпал;
определяют известный интервал между кадрами; и определяют расстояние между шпалами конечного кадра, на основании количества из одного или более промежуточных кадров с отсутствием шпал и известного интервала между кадрами.
анализируют кадр совокупности изображений, причем кадр содержит интересующую область;
определяют содержит ли интересующая область рельсовую подкладку;
определяют контур шпалы и контур рельсовой подкладки, в случае предоставления рельсовой подкладки;
сравнивают ориентацию контура шпалы и ориентацию контура рельсовой подкладки; и
определяют на основании сравнения, является ли рельсовая подкладка невыровненной или осевшей.
анализируют один или более промежуточных кадров и конечный кадр совокупности изображений, причем конечный кадр содержит рельсы, тогда как один или более промежуточных кадров с отсутствием рельс;
определяют количество из одного или более промежуточных кадров с отсутствием рельс;
определяют известный интервал между кадрами; и
идентифицируют разрыв в рельсе на основании количества из одного или
более промежуточных кадров с отсутствием рельс и известного интервала между кадрами.
по меньшей мере, один источник света, расположенный рядом с железнодорожным полотном, для проецирования пучка света от края до края всего полотна,
по меньшей мере, один оптический приемник, расположенный рядом с железнодорожным полотном для захвата, по меньшей мере, части изображения железнодорожного полотна путем приема, по меньшей мере, части света, отраженного от железнодорожного полотна, причем оптический приемник включает в себя процессор для генерации пространственного профиля захваченного изображения железнодорожного полотна, и
по меньшей мере, один процессор для анализа пространственного профиля и определения географического местоположения совокупности изображений, причем процессор дополнительно выполнен с возможностью компилирования совокупности изображений с одной или более соответствующими физическими характеристиками, и записи соответствующего географического местоположения совокупности изображений по железнодорожному полотну.
Комментарии