Устройство обнаружения уступов и способ обнаружения уступов - RU2667026C1
Код документа: RU2667026C1
Чертежи





















Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству обнаружения уступов и к способу обнаружения уступов для обнаружения уступа на поверхности дороги.
Уровень техники
[0002] Известно устройство обнаружения придорожных объектов, которое оценивает структуру поверхности дороги вокруг транспортного средства с использованием параллактического изображения, захваченного посредством стереокамеры, и обнаруживает уступ на поверхности дороги, сформированный посредством придорожных объектов, таких как бордюр, из структуры поверхности дороги (см. патентный документ 1). Устройство в патентном документе 1 сканирует высоту поверхности дороги вдоль линии горизонтального сканирования изображения и обнаруживает уступ, если величина изменения высоты поверхности дороги превышает или равна пороговому значению.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2014-002608
Сущность изобретения
Техническая задача
[0004] Вследствие влияния погрешностей, включенных в структуру поверхности дороги, оцененной из изображения стереокамеры, по мере того, как уменьшается угол, сформированный посредством линии горизонтального сканирования относительно касательного направления уступа, градиент изменения высоты поверхности дороги становится меньшим. Соответственно, когда угол, сформированный посредством касательной уступа и линии горизонтального сканирования, является небольшим, точность обнаружения позиции уступа является низкой.
[0005] Настоящее изобретение осуществлено с учетом вышеизложенной проблемы, и его цель заключается в том, чтобы предоставлять устройство обнаружения уступов и способ обнаружения уступов, которые способны к точному обнаружению позиции уступа на поверхности дороги.
Решение задачи
[0006] Устройство обнаружения уступов согласно первому аспекту настоящего изобретения определяет расстояние и направление относительно поверхности дороги вокруг транспортного средства, с использованием датчика расстояния, смонтированного на транспортном средстве, и задает первую позицию определения уступа и вторую позицию определения уступа на поверхности дороги. Затем устройство обнаружения уступов вычисляет изменения высоты поверхностей дороги в первой позиции определения уступа и второй позиции определения уступа на основе расстояния и направления относительно поверхности дороги и обнаруживает уступ на поверхности дороги на основе одной из позиций определения уступов, причем градиент изменения высоты поверхности дороги в одной из них больше.
[0007] Устройство обнаружения уступов согласно второму аспекту настоящего изобретения задает первую позицию определения уступа на поверхности дороги и вычисляет изменение высоты поверхности дороги в первой позиции определения уступа на основе расстояния и направления относительно поверхности дороги. Если градиент изменения высоты поверхности дороги в первой позиции определения уступа превышает или равен пороговому значению, схема вычисления высоты поверхности дороги не вычисляет изменение высоты поверхности дороги во второй позиции определения уступа, и уступ на поверхности дороги обнаруживается на основе изменения высоты поверхности дороги в первой позиции определения уступа.
Преимущества изобретения
[0008] Настоящее изобретение уменьшает влияние погрешностей, включенных в расстояние и направление относительно поверхности дороги, обнаруженные посредством датчика расстояния, и ввиду этого точно обнаруживает позицию уступа на поверхности дороги.
Краткое описание чертежей
[0009] Фиг. 1 является блок-схемой, иллюстрирующей общую конфигурацию устройства 1 обнаружения уступов согласно первому варианту осуществления.
Фиг. 2 является видом в перспективе, иллюстрирующим пример первой позиции (Pa1) определения уступа и второй позиции (Pa2) определения уступа, которые имеют линейные формы и задаются на поверхности дороги вокруг транспортного средства (Vc).
Фиг. 3 является видом сверху, соответствующим фиг. 2.
Фиг. 4 является графиком, иллюстрирующим изменение высоты поверхности дороги в первой позиции (Pa1) определения уступа.
Фиг. 5 является графиком, иллюстрирующим изменение высоты поверхности дороги во второй позиции (Pa2) определения уступа.
Фиг. 6 является блок-схемой последовательности операций, иллюстрирующей пример способа обнаружения уступов с использованием устройства 1 обнаружения уступов на фиг. 1.
Фиг. 7 является блок-схемой, иллюстрирующей общую конфигурацию устройства 2 обнаружения уступов согласно второму варианту осуществления.
Фиг. 8 является блок-схемой последовательности операций, иллюстрирующей пример способа обнаружения уступов с использованием устройства 2 обнаружения уступов на фиг. 7.
Фиг. 9 является блок-схемой, иллюстрирующей общую конфигурацию устройства 3 обнаружения уступов согласно третьему варианту осуществления.
Фиг. 10 является видом в перспективе, иллюстрирующим пример линейных позиций (Pa1, Pa2) определения уступов и области Q1 существования уступа, которые задаются на поверхности дороги вокруг транспортного средства (Vc).
Фиг. 11 является видом сверху, соответствующим фиг. 10.
Фиг. 12 является блок-схемой последовательности операций, иллюстрирующей пример способа обнаружения уступов с использованием устройства 3 обнаружения уступов на фиг. 9.
Фиг. 13 является блок-схемой, иллюстрирующей общую конфигурацию устройства 4 обнаружения уступов согласно четвертому варианту осуществления.
Фиг. 14 является видом в перспективе, иллюстрирующим работу схемы 22 оценки областей существования уступов согласно четвертому варианту осуществления.
Фиг. 15 является блок-схемой последовательности операций, иллюстрирующей пример способа обнаружения уступов с использованием устройства 4 обнаружения уступов на фиг. 13.
Фиг. 16 является блок-схемой, иллюстрирующей общую конфигурацию устройства 5 обнаружения уступов согласно пятому варианту осуществления.
Фиг. 17 является видом в перспективе, иллюстрирующим работу схемы 23 оценки областей существования уступов согласно пятому варианту осуществления.
Фиг. 18 является блок-схемой последовательности операций, иллюстрирующей пример способа обнаружения уступов с использованием устройства 5 обнаружения уступов на фиг. 16.
Фиг. 19 является блок-схемой, иллюстрирующей общую конфигурацию устройства 6 обнаружения уступов согласно шестому варианту осуществления.
Фиг. 20 является блок-схемой последовательности операций, иллюстрирующей пример способа обнаружения уступов с использованием устройства 6 обнаружения уступов на фиг. 19.
Фиг. 21(a) является схемой, иллюстрирующей способ обнаружения уступов посредством схемы 16 вычисления высоты поверхности дороги, и фиг. 21(b) является схемой для пояснения диапазона настроек позиции (ya) определения окрестности уступа.
Фиг. 22 является видом в перспективе, иллюстрирующим пример позиции (Pa1) определения уступа в случае, если стереокамера устанавливается на поперечной стороне транспортного средства Vc.
Фиг. 23 является видом сверху, иллюстрирующим пример LRF на 360 градусов, в котором LRF (12) устанавливается в центре крыши транспортного средства Vc, и диапазон излучения задается в качестве всей окружности транспортного средства.
Фиг. 24 является блок-схемой последовательности операций, иллюстрирующей пример способа обнаружения уступов в случае использования лазерного дальномера (LRF) в качестве датчика 12 расстояния.
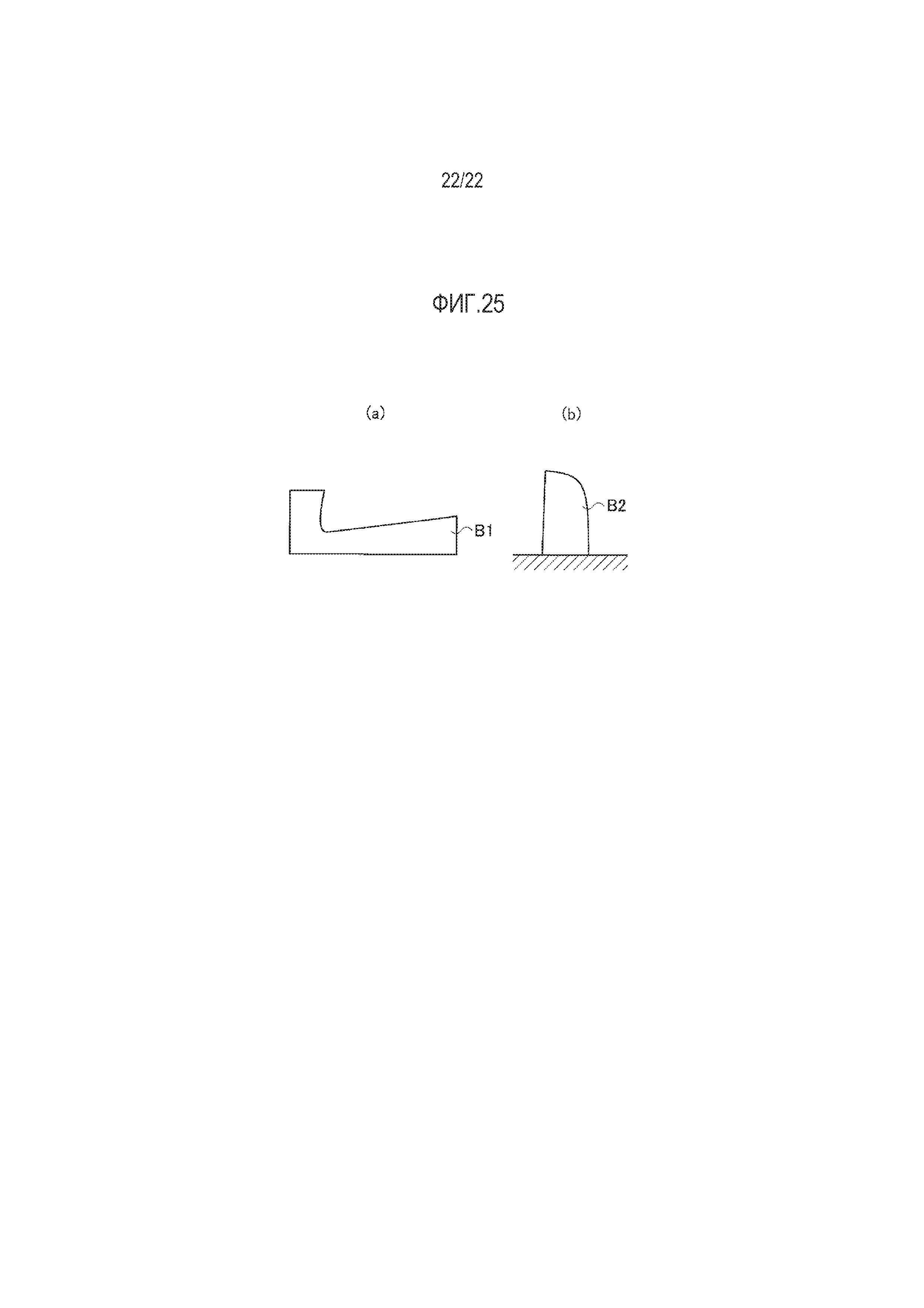
Фиг. 25(a) является видом в поперечном сечении, иллюстрирующим пример блока с низким бордюрным камнем, используемого в дорожном окружении в Японии, и фиг. 25(b) является видом в поперечном сечении, иллюстрирующим пример блока с высоким бордюрным камнем для задания границы между тротуаром и проезжей частью.
Подробное описание вариантов осуществления
[0010] Первый вариант осуществления
Далее описываются варианты осуществления со ссылкой на чертежи.
[0011] Ниже описывается общая конфигурация устройства 1 обнаружения уступов согласно первому варианту осуществления со ссылкой на фиг. 1. Устройство 1 обнаружения уступов определяет расстояние и направление относительно поверхностей объектов (в дальнейшем называемых "поверхностью дороги"), включающих в себя дорогу и бордюр на дороге вокруг транспортного средства, и обнаруживает уступ на поверхности дороги на основе изменения высоты поверхности дороги в нескольких позициях определения уступов, которые имеют линейную форму в направлении ширины транспортного средства и задаются на поверхности дороги.
[0012] В частности, устройство 1 обнаружения уступов включает в себя датчик 12 расстояния для обнаружения расстояния и направления относительно поверхности дороги вокруг транспортного средства, и микрокомпьютер 13 для выполнения последовательности обработки информации, чтобы обнаруживать уступ на поверхности дороги из данных измерений расстояния, включающих в себя расстояние и направление относительно поверхности дороги, обнаруженные посредством датчика 12 расстояния.
[0013] Пример датчика 12 расстояния представляет собой стереокамеру, которая выполняет съемку объектов вокруг транспортного средства из нескольких различных направлений одновременно и ввиду этого также может сохранять информацию в направлении глубины (расстояния от датчика 12) объектов вокруг транспортного средства. Посредством выполнения определенной обработки изображений для стереоизображений (включающих в себя параллактическое изображение), полученных посредством стереокамеры, можно получать трехмерную информацию изображения объекта, появляющегося на стереоизображениях объекта вокруг транспортного средства. Объекты вокруг транспортного средства включают в себя дорогу и бордюр. Ниже поясняются подробности.
[0014] Микрокомпьютер 13 включает в себя, например, универсальный микроконтроллер, оснащенный CPU, запоминающим устройством и модулем ввода-вывода, и служит в качестве нескольких схем обработки информации, включенных в устройство 1 обнаружения уступов посредством выполнения предварительно установленной компьютерной программы. Микрокомпьютер 13 многократно выполняет, с предварительно определенными временными интервалами, последовательность циклов обработки информации, чтобы обнаруживать уступ на поверхности дороги из расстояния и направления относительно поверхности дорог, обнаруженных посредством датчика 12 расстояния. Микрокомпьютер 13 также может использоваться в качестве электронного модуля управления (ECU), используемого для другого управления транспортным средством.
[0015] Несколько схем обработки информации, в качестве которых выступает микрокомпьютер 13, включают в себя арифметическую схему 14, схему 15 задания позиций определения уступов, схему 16 вычисления высоты поверхности дороги и схему 18 обнаружения уступов. Схема 18 обнаружения уступов включает в себя первый модуль 19 сравнения.
[0016] Арифметическая схема 14 составляет модуль 11 измерения расстояния вместе с датчиком 12 расстояния и выполняет, из стереоизображений, полученных посредством стереокамеры, последовательность обработки стереоизображения, чтобы получать трехмерную информацию изображений объекта, появляющихся на стереоизображениях объектов вокруг транспортного средства.
[0017] Например, арифметическая схема 14 выполняет обработку коррекции искажения линзы для коррекции искажения стереоизображений, вызываемого посредством линз, и выполняет обработку коррекции параллелизма для коррекции вертикальной позиции между стереоизображениями (обработку для того, чтобы задавать стереоизображения параллельными и с идентичной высотой). Затем арифметическая схема 14 выполняет обработку стереосогласования для оценки соответствия между пикселами стереоизображений. Это позволяет вычислять не только двумерные координаты объекта на плоскости обработки изображений стереокамеры, но также и расстояния от плоскости обработки изображений стереокамеры до объекта. Таким образом, можно определять расстояние и направление относительно объекта вокруг транспортного средства.
[0018] Обработка коррекции искажения линзы, например, захватывает плоскую пластину с черно-белым шахматным рисунком с помощью каждой камеры и оценивает параметр искажения линзы и параметр центра линзы камеры, которые обеспечивают возможность точкам решетки шахматного рисунка иметь решетчатую форму, состоящую из прямоугольников. Здесь, эта обработка может представлять собой общепринятый способ для коррекции искажения линзы, и настоящий вариант осуществления не имеет конкретных ограничений.
[0019] Обработка коррекции параллелизма, например, захватывает плоскую пластину с черно-белым шахматным рисунком с помощью обеих камер стереокамеры и оценивает параметр пространственной позиции и угловой параметр между стереокамерами, которые обеспечивают возможность нахождения позиций точек решетки шахматного рисунка на изображениях обеих камер в идентичных вертикальных позициях. Здесь, эта обработка может представлять собой общепринятый способ для коррекции параллелизма, и настоящий вариант осуществления не имеет конкретных ограничений.
[0020] Обработка стереосогласования, например, вычисляет то, с каким пикселом в изображении, снятом правой камерой, ассоциирован каждый пиксел в изображении, снятом левой камерой, относительно изображения, снятого левой камерой. Например, обработка стереосогласования вычисляет абсолютные значения для значения яркости каждого пиксела в изображении, снятом левой камерой, и значения яркости каждого пиксела в изображении, снятом правой камерой, в качестве значений оценки и вычисляет пиксел в изображении, снятом правой камерой, значение оценки которого является минимальным, в качестве ассоциированного пиксела. Способы вычисления значения для оценки включают в себя, например, способ с использованием суммы абсолютных разностей (SAD) или суммы квадратов разности (SSD) или способ, в котором область вычисления с оценкой включает в себя не только одну точку каждого пиксела, но и периферийные пикселы каждого пиксела. Здесь, способ для вычисления значений оценки также может представлять собой другой общепринятый способ, и настоящий вариант осуществления не имеет конкретных ограничений.
[0021] Схема 15 задания позиций определения уступов задает линейную позицию определения уступа в направлении ширины транспортного средства на поверхности дороги вокруг транспортного средства в координатах данных измерений расстояния, обнаруженных посредством датчика 12 расстояния. Например, как проиллюстрировано на фиг. 2 и 3, схема 15 задания позиций определения уступов задает первую позицию (Pa1) определения уступа, которая находится от датчика 12 расстояния в первом предварительно определенном направлении (Da1) на первое предварительно определенное расстояние и идет в направлении, ортогональном к первому предварительно определенному направлению (Da1) на поверхности дороги в координатах данных измерений расстояния. Фиг. 2 и 3 иллюстрируют пример, в котором датчик 12 расстояния устанавливается в передней части транспортного средства (Vc), и первое предварительно определенное направление (Da1) задается в качестве направления движения транспортного средства (Vc). Следовательно, первая позиция (Pa1) определения уступа, идущая параллельно с направлением ширины транспортного средства, задается в координатах данных измерений расстояния с нахождением от транспортного средства (Vc) в направлении вперед на первое предварительно определенное расстояние.
[0022] Схема 15 задания позиций определения уступов дополнительно задает вторую позицию (Pa2) определения уступа, которая находится от датчика 12 расстояния во втором предварительно определенном направлении (Da2) на второе предварительно определенное расстояние и идет в направлении, ортогональном ко второму предварительно определенному направлению (Da2) на поверхности дороги в координатах данных измерений расстояния. Второе предварительно определенное направление (Da2) отличается от первого предварительно определенного направления. В частности, и первое предварительно определенное направление (Da1) и второе предварительно определенное направление (Da2) задаются в горизонтальной плоскости. Первое предварительно определенное направление (Da1) не является параллельным второму предварительно определенному направлению (Da2), и угол, сформированный посредством двух направлений, составляет угол, отличный от 0 градусов и 180 градусов.
[0023] Следует отметить, что, как описано ниже, первое предварительно определенное расстояние и второе предварительно определенное расстояние могут регулироваться надлежащим образом таким образом, что первая позиция (Pa1) определения уступа и вторая позиция (Pa2) определения уступа пересекают друг друга в области существования уступа. Помимо этого, первая позиция (Pa1) определения уступа и вторая позиция (Pa2) определения уступа задаются на стереоизображениях в области захвата изображений стереокамеры. Первое предварительно определенное направление (Da1) не ограничено направлением движения транспортного средства (Vc). Дополнительно, несколько позиций определения уступов, которые находятся в направлениях, отличающихся от первого предварительно определенного направления (Da1) и второго предварительно определенного направления (Da2), могут дополнительно задаваться с возможностью определять уступ.
[0024] В примере, проиллюстрированном на фиг. 2 и 3, уступ (LD), имеющий крутое изменение высоты поверхности дороги, формируется на обочине дороги, которая представляет собой конец в направлении ширины транспортного средства проезжей части, по которой может двигаться транспортное средство (Vc). За пределами проезжей части с уступом (LD), в качестве границы предоставляется уступчатый участок (например, тротуар или обочина дороги), поверхность дороги которого находится на один уступ выше проезжей части. Как описано выше, в примере, проиллюстрированном на фиг. 2 и 3, дорога включает в себя проезжую часть и уступчатый участок (тротуар или обочину дороги), и между проезжей частью и уступчатым участком (тротуаром или обочиной дороги) формируется уступ (LD). Линейная первая позиция (Pa1) определения уступа и вторая позиция (Pa2) определения уступа идут в направлениях, в которых они пересекают проезжую часть, уступ (LD) и уступчатый участок (тротуар или обочину дороги).
[0025] Следует отметить, что позиционная взаимосвязь между вышеприведенным датчиком 12 расстояния и позициями (Pa1, Pa2) определения уступов представляет собой простой пример. Ниже описывается другой пример со ссылкой на фиг. 22.
[0026] Схема 16 вычисления высоты поверхности дороги вычисляет каждое из изменений данных высоты в точках измерения поверхностей дороги в первой позиции (Pa1) определения уступа и второй позиции (Pa2) определения уступа, на основе расстояний и направлений относительно поверхностей дороги, обнаруженных посредством модуля 11 измерения расстояния.
[0027] В частности, схема 16 вычисления высоты поверхности дороги выполняет обработку преобразования координат для расстояния и направления относительно поверхности дороги, чтобы получать трехмерную информацию относительно объектов (включающих в себя дорогу и бордюр) вокруг транспортного средства в координатах данных измерений расстояния. Трехмерная информация относительно объектов вокруг транспортного средства включает в себя трехмерную информацию относительно поверхности дороги (включающую в себя поверхности дороги и бордюр) вокруг транспортного средства. Таким образом, схема 16 вычисления высоты поверхности дороги может получать высоту поверхности дороги вокруг транспортного средства.
[0028] Схема 16 вычисления высоты поверхности дороги вычисляет изменение высоты поверхности дороги (данные измерений расстояния) в каждой из позиций (Pa1, Pa2) определения уступов из высоты поверхности дороги. Фиг. 4 является графиком, иллюстрирующим изменение высоты поверхности дороги в первой позиции (Pa1) определения уступа, и фиг. 5 является графиком, иллюстрирующим изменение высоты поверхности дороги во второй позиции (Pa2) определения уступа. Вертикальные оси фиг. 4 и 5 представляют высоту поверхности дороги, и горизонтальные оси представляют позиции (Pa1, Pa2) определения уступов, идущие в направлении ширины транспортного средства.
[0029] Как проиллюстрировано на фиг. 4 и 5, уступ (LD) формируется между проезжей частью (Rr) и уступчатым участком (Rd). В частности, поверхности дороги проезжей части (Rr) и уступчатого участка (Rd) имеют различные высоты и соединяются посредством участка (HC) изменения высоты поверхности дороги, в котором изменяется высота поверхности дороги. Соединительный участок участка (HC) изменения высоты поверхности дороги и проезжей части (Rr) задается "как конечная точка LD уступа". Уступ включает в себя участок (HC) изменения высоты поверхности дороги и конечную точку LD уступа. Конечная точка LD уступа имеет смысл указания границы проезжей части в направлении ширины транспортного средства, по которой может двигаться транспортное средство.
[0030] Как проиллюстрировано на фиг. 5, если градиент изменения высоты поверхности дороги в участке (HC) изменения высоты поверхности дороги является крутым, можно точно идентифицировать позицию конечной точки LD уступа. Тем не менее, как проиллюстрировано на фиг. 4, если градиент изменения высоты поверхности дороги в участке (HC) изменения высоты поверхности дороги является пологим, затруднительно точно идентифицировать позицию конечной точки LD уступа. Другими словами, чем круче градиент изменения высоты поверхности дороги в участке (HC) изменения высоты поверхности дороги, тем точнее может идентифицироваться позиция конечной точки LD уступа.
[0031] Поскольку градиент изменения высоты поверхности дороги в участке (HC) изменения высоты поверхности дороги определяется с использованием поперечного сечения в позиции (Pa1, Pa2) определения уступа в координатах данных измерений расстояния, обнаруженных посредством датчика 12 расстояния, который направлен под углом вниз от транспортного средства к поверхности дороги, градиент изменяется в зависимости от угла, сформированного посредством касательной конечной точки LD уступа и позиции (Pa1, Pa2) определения уступа, как проиллюстрировано на фиг. 3. В частности, в точке пересечения позиции (Pa1, Pa2) определения уступа и конечной точки LD уступа, чем ближе к прямому углу угол, сформированный посредством касательной конечной точки LD уступа и позиции (Pa1, Pa2) определения уступа, тем круче градиент изменения высоты поверхности дороги в участке (HC) изменения высоты поверхности дороги. Напротив, чем меньше угол, сформированный посредством касательной конечной точки LD уступа и позиции (Pa1, Pa2) определения уступа, тем в большей степени является наклонным поперечное сечение, задаваемое посредством позиции (Pa1, Pa2) определения уступа в координатах данных измерений расстояния. Следовательно, градиент изменения высоты поверхности дороги в участке (HC) изменения высоты поверхности дороги является более пологим. Таким образом, в точке пересечения позиции (Pa1, Pa2) определения уступа и конечной точки LD уступа, чем ближе к прямому углу угол, сформированный посредством касательной конечной точки LD уступа и позиции (Pa1, Pa2) определения уступа, тем точнее может идентифицироваться позиция конечной точки LD уступа.
[0032] С учетом вышеизложенного, схема 18 обнаружения уступов обнаруживает уступ на поверхности дороги на основе одной из первой позиции (Pa1) определения уступа и второй позиции (Pa2) определения уступа, градиент изменения высоты поверхности дороги в которой превышает градиент другой.
[0033] В частности, схема 18 обнаружения уступов включает в себя первый модуль 19 сравнения для сравнения градиентов изменений высоты поверхностей дороги в первой позиции (Pa1) определения уступа и второй позиции (Pa2) определения уступа. Например, первый модуль 19 сравнения сравнивает темпы изменения высоты поверхностей дороги в позициях определения уступов. Первый модуль 19 сравнения может сравнивать средние значения темпов изменения высоты в участках (HC) изменения высоты поверхности дороги или сравнивать темпы изменения высоты только в окрестностях LD конечных точек уступов.
[0034] Схема 18 обнаружения уступов выбирает позицию определения уступа (фиг. 5), в которой темп изменения высоты является большим, другими словами, в которой градиент изменения высоты поверхности дороги является крутым, и обнаруживает позицию конечной точки LD уступа на границе между участком (HC) изменения высоты поверхности дороги и проезжей частью (Rr), проиллюстрированной на фиг. 5. Способ обнаружения позиции конечной точки LD уступа не ограничен конкретным образом, и может использоваться известный способ.
[0035] Например, окрестность границы между участком (HC) изменения высоты поверхности дороги и проезжей частью (Rr) разделяется на несколько небольших секций. После этого вычисляется темп изменения высоты каждой секции. Если изменения высоты в смежных секциях превышают или равны предварительно определенному пороговому значению, граница между смежными секциями может идентифицироваться в качестве позиции конечной точки LD уступа.
[0036] Между тем поверхность дороги проезжей части (Rr) имеет такой градиент (наклон), что высота уменьшается от центра к обочинам дороги с обеих сторон. При рассмотрении градиента вокруг уступа, после того, как схема 18 обнаружения уступов определяет наличие уступа из изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа, схема 16 вычисления высоты поверхности дороги дополнительно может задавать позицию (ya) определения окрестности уступа и извлекать только данные измерений расстояния определенного участка градиента около уступа, чтобы точно обнаруживать позицию конечной точки LD уступа. В дальнейшем в этом документе, описывается конкретный способ.
[0037] Во-первых, схема 16 вычисления высоты поверхности дороги обнаруживает позицию, в которой возникает изменение высоты, большее или равное предварительно определенному значению определения высоты, из изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа (фиг. 4). В частности, как проиллюстрировано на фиг. 21(a), схема 16 вычисления высоты поверхности дороги оценивает высоту (HE) поверхности дороги проезжей части, и после этого схема 18 обнаружения уступов определяет то, что уступ существует, если изменение высоты, большее или равное значению (hD) определения высоты, возникает относительно высоты (HE) поверхности дороги проезжей части.
[0038] В частности, предполагая, что в направлении вперед датчика 12 расстояния существует область поверхности дороги проезжей части, центральная позиция (CVC) датчика 12 расстояния вычисляется из данных измерений расстояния первой позиции (Pa1) определения уступа. Затем область в предварительно определенной дальности от центральной позиции (CVC) датчика 12 расстояния извлекается в качестве центральной области (G1) обнаружения посредством датчика расстояния. После этого, оценивается высота (HE) поверхности дороги в центральной области (G1) обнаружения посредством датчика расстояния. Направление высоты центральной области (G1) обнаружения посредством датчика расстояния дискретно разделяется на секции, и подсчитывается число данных измерений расстояния центральной области (G1) обнаружения посредством датчика расстояния, существующей в каждой секции. Высота секции, в которой число подсчетов является наибольшим, рассматривается в качестве высоты (HE) проезжей части. Кроме того, также преобразование Хафа может использоваться для того, чтобы оценивать высоту поверхности дороги проезжей части.
[0039] Здесь, центральная позиция (CVC) датчика 12 расстояния является оптимальной позицией в случае, если датчик 12 расстояния устанавливается в передней части транспортного средства Vc в направлении движения. Центральная позиция (CVC) датчика 12 расстояния варьируется в зависимости от позиции установки датчика 12 расстояния на транспортном средстве Vc. Следовательно, позиция, с наибольшей вероятностью считающаяся поверхностью дороги относительно транспортного средства Vc, может задаваться в качестве области для оценки высоты (HE) поверхности дороги проезжей части.
[0040] Как проиллюстрировано на фиг. 21(a), если одни из данных измерений существуют в позиции (TD) выше высоты (HE) поверхности дороги проезжей части на величину, большую или равную значению (hD) определения высоты, схема 16 вычисления высоты поверхности дороги определяет то, что здесь существует уступ. Помимо этого, также можно вычислять локальные изменения высоты, продолжающиеся в направлении ширины транспортного средства, и определять то, что уступ существует, если изменение высоты превышает или равно предварительно определенному значению.
[0041] Затем, схема 16 вычисления высоты поверхности дороги задает позицию определения окрестности уступа посредством дополнительного ограничения диапазона первой позиции (Pa1) определения уступа в направлении высоты и направлении ширины транспортного средства. В частности, как проиллюстрировано на фиг. 21(b), схема 16 вычисления высоты поверхности дороги задает, относительно позиции (TD) изменения высоты, предварительно определенную высоту (xa) вниз с точки зрения направления высоты и предварительно определенное расстояние (ya) к проезжей части с точки зрения направления ширины транспортного средства, с тем чтобы задавать позицию (ya) определения окрестности уступа. Это позволяет извлекать только данные измерений расстояния определенного участка градиента около уступа и ввиду этого точно обнаруживать позицию конечной точки LD уступа, даже если поверхность дороги проезжей части (Rr) имеет градиент (наклон), в котором высота уменьшается от центра к обочинам дороги с обеих сторон.
[0042] Со ссылкой на фиг. 6, приводится описание для примера способа обнаружения уступов с использованием устройства 1 обнаружения уступов на фиг. 1. Последовательность операций обработки, показанная на фиг. 6, многократно выполняется в предварительно определенных временных циклах. Во-первых, на этапе S01, стереоизображения получаются с использованием стереокамеры, которая представляет собой пример датчика 12 расстояния.
[0043] Процесс переходит к этапу S03, на котором арифметическая схема 14 выполняет обработку коррекции искажения линзы для коррекции искажения стереоизображений, вызываемого посредством линз, и обработку коррекции параллелизма для коррекции вертикальной позиции между стереоизображениями. Процесс переходит к этапу S05, на котором арифметическая схема 14 выполняет обработку стереосогласования для оценки соответствия между пикселами стереоизображений. Затем арифметическая схема 14 обнаруживает расстояния и направления относительно объектов вокруг транспортного средства.
[0044] Процесс переходит к этапу S07, на котором схема 15 задания позиций определения уступов задает линейную первую позицию (Pa1) определения уступа, идущую в направлении ширины транспортного средства на поверхности дороги вокруг транспортного средства, как проиллюстрировано на фиг. 2 и 3. После этого процесс переходит к этапу 09, на котором схема 15 задания позиций определения уступов вычисляет изменение высоты поверхности дороги в первой позиции (Pa1) определения уступа (первое изменение высоты) на основе расстояний и направлений относительно объектов, полученных посредством арифметической схемы 14, как проиллюстрировано на фиг. 4.
[0045] Процесс переходит к этапу 11, на котором схема 15 задания позиций определения уступов задает вторую позицию (Pa2) определения уступа, которая отличается от первой позиции (Pa1) определения уступа на поверхности дороги вокруг транспортного средства, как проиллюстрировано на фиг. 2 и 3. После этого процесс переходит к этапу 13, на котором схема 15 задания позиций определения уступов вычисляет изменение высоты поверхности дороги во второй позиции (Pa2) определения уступа (второе изменение высоты) на основе расстояний и направлений относительно объектов, полученных посредством арифметической схемы 14, как проиллюстрировано на фиг. 5.
[0046] Процесс переходит к этапу 15, на котором первый модуль 19 сравнения сравнивает градиенты изменений высоты поверхностей дороги в первой позиции (Pa1) определения уступа и второй позиции (Pa2) определения уступа. После этого процесс переходит к этапу 17, на котором схема 18 обнаружения уступов выбирает позицию определения уступа (фиг. 5), в которой изменение высоты является большим, другими словами, в которой градиент изменения высоты поверхности дороги является крутым, и обнаруживает позицию конечной точки LD уступа на границе между участком (HC) изменения высоты поверхности дороги и проезжей частью (Rr).
[0047] Как описано выше, первый вариант осуществления предоставляет следующую работу и преимущества.
[0048] Поскольку погрешности включены в расстояние и направление относительно поверхности дороги, обнаруженные посредством датчика 12 расстояния, если угол, сформированный посредством касательной уступа (LD) и позиции определения уступа, является небольшим, точность в обнаружении позиции уступа (LD) уменьшается вследствие влияния погрешностей. В свете этого, задаются две позиции (Pa1, Pa2) определения уступов, углы которых, сформированные с касательной уступа (LD), отличаются друг от друга. После этого уступ на поверхности дороги обнаруживается на основе одной из первой позиции (Pa1) определения уступа и второй позиции (Pa2) определения уступа, градиент изменения высоты поверхности дороги в которой превышает градиент другой (фиг. 5). Это уменьшает влияние погрешностей, включенных в расстояние и направление относительно поверхности дороги, обнаруженные посредством датчика 12 расстояния, и позволяет точно обнаруживать позицию уступа (LD) на поверхности дороги. В частности, можно более точно обнаруживать позицию конечной точки LD уступа на изгибе или пересечении, на котором угол, сформированный посредством касательного направления уступа и позиции определения уступа, является небольшим.
[0049] Второй вариант осуществления
Со ссылкой на фиг. 7, ниже приводится описание общей конфигурации устройства 2 обнаружения уступов согласно второму варианту осуществления. Если градиент изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа превышает или равен пороговому значению, устройство 2 обнаружения уступов обнаруживает уступ (LD) на поверхности дороги на основе изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа. Дополнительно, в этом случае, чтобы уменьшать вычислительную нагрузку и повышать скорость обработки при сохранении точности обнаружения уступов, устройство 2 обнаружения уступов не задает вторую позицию (Pa2) определения уступа и не вычисляет изменение высоты поверхности дороги во второй позиции определения уступа.
[0050] В частности, схема 16 вычисления высоты поверхности дороги включает в себя второй модуль 20 сравнения для сравнения градиента изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа с пороговым значением. Другие конфигурации являются идентичными конфигурациям в устройстве 1 обнаружения уступов на фиг. 1, и их описания опускаются.
[0051] Второй модуль 20 сравнения сравнивает предварительно определенное пороговое значение и градиент изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа. Способ сравнения не ограничен конкретным образом, и может использоваться известный способ. Например, второй модуль 20 сравнения допускает использование темпа изменения высоты поверхности дороги в позиции определения уступа для сравнения. Второй модуль 20 сравнения может использовать среднее значение темпа изменения высоты в участке (HC) изменения высоты поверхности дороги на фиг. 4 для сравнения или может использовать только темп изменения высоты около конечной точки LD уступа для сравнения. Следует отметить, что пороговое значение может задаваться надлежащим образом в соответствии с точностью обнаружения, требуемой для устройства 2 обнаружения уступов.
[0052] Со ссылкой на фиг. 8, приводится описание для примера способа обнаружения уступов с использованием устройства 2 обнаружения уступов на фиг. 7. Последовательность операций обработки, проиллюстрированная на фиг. 8, многократно выполняется в предварительно определенных временных циклах. Фиг. 8 отличается от фиг. 6 тем, что этап S21 выполняется между этапами S09 и S11. Обработка, выполняемая на этапах S01-S17 на фиг. 8, является идентичной обработке на этапах S01-S17 на фиг. 6, и ее описания опускаются.
[0053] На этапе S21, второй модуль 20 сравнения сравнивает градиент изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа с пороговым значением. Если градиент изменения высоты поверхности дороги превышает или равен пороговому значению ("Да" на S21), можно определять, что градиент изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа является достаточно крутым, чтобы удовлетворять точности обнаружения, требуемой для устройства 2 обнаружения уступов. В этом случае, процесс переходит к этапу S17 без выполнения этапов S11-S15. На этапе S17, схема 18 обнаружения уступов обнаруживает уступ на поверхности дороги на основе изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа.
[0054] С другой стороны, если градиент изменения высоты поверхности дороги меньше порогового значения ("Нет" на этапе S21), можно определять, что градиент изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа не является достаточно крутым, чтобы удовлетворять точности обнаружения, требуемой для устройства 2 обнаружения уступов. Следовательно, чтобы удовлетворять точности обнаружения позиции, этапы S11-S15 выполняются идентично первому варианту осуществления до того, как процесс переходит к этапу S17. На этапе S17, схема 18 обнаружения уступов обнаруживает уступ на поверхности дороги на основе позиции определения уступа, градиент изменения высоты поверхности дороги в которой больше.
[0055] Как описано выше, второй вариант осуществления предоставляет следующую работу и преимущества.
[0056] Если градиент изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа превышает или равен пороговому значению, уступ на поверхности дороги обнаруживается на основе изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа. Это уменьшает влияние погрешностей, включенных в расстояние и направление относительно поверхности дороги, обнаруженные посредством датчика 12 расстояния, и позволяет точно обнаруживать позицию уступа на поверхности дороги. В частности, можно более точно обнаруживать позицию конечной точки LD уступа на изгибе или пересечении, на котором угол, сформированный посредством касательного направления уступа и позиции определения уступа, является небольшим. Помимо этого, схема 15 задания позиций определения уступов не задает вторую позицию (Pa2) определения уступа, и схема 16 вычисления высоты поверхности дороги не вычисляет изменение высоты поверхности дороги во второй позиции (Pa2) определения уступа. Таким образом, можно уменьшать вычислительную нагрузку и повышать скорость обработки при сохранении точности обнаружения уступов.
[0057] Следует отметить, что в примере, проиллюстрированном во втором варианте осуществления, если градиент изменения высоты поверхности дороги меньше порогового значения ("Нет" на S21), выполняется обработка, идентичная обработке первого варианта осуществления. Тем не менее, вариант осуществления не ограничен этим, и могут вноситься различные модификации. Например, если градиент изменения высоты поверхности дороги меньше порогового значения ("Нет" на S21), устройство 2 обнаружения уступов может завершать этот рабочий цикл обработки без выполнения этапов S11-S17 и начинать следующий цикл обработки. Затем на этапе S07 в следующем цикле обработки, схема 15 задания позиций определения уступов может задавать первое предварительно определенное направление и первое предварительно определенное расстояние, которые отличаются от предыдущего первого предварительно определенного направления и первого предварительно определенного расстояния. В этой модификации, также можно уменьшать вычислительную нагрузку и повышать скорость обработки при сохранении точности обнаружения уступов. В примере второго варианта осуществления, если градиент изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа превышает или равен пороговому значению, уступ поверхности дороги обнаруживается на основе изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа и изменения высоты поверхности дороги во второй позиции (Pa2) определения уступа не вычислена. Кроме этого, можно дополнительно задавать несколько позиций определения уступов и повторять обработку определения в порядке от первой позиции (Pa1) определения уступа до позиции определения уступа, которая обеспечивает возможность градиенту изменения высоты поверхности дороги превышать или быть равным пороговому значению. Если позиция определения уступа, которая обеспечивает возможность градиенту изменения высоты поверхности дороги превышать или быть равным пороговому значению, обнаружена, можно обнаруживать уступ на поверхности дороги на основе изменения высоты поверхности дороги с позицией определения уступа, которая обеспечивает возможность градиенту изменения высоты поверхности дороги превышать или быть равным пороговому значению, без выполнения следующей обработки определения.
[0058] Третий вариант осуществления
Если точка пересечения первой позиции (Pa1) определения уступа и уступа (LD) и точка пересечения второй позиции (Pa2) определения уступа и уступа (LD) находятся на большом расстоянии друг от друга, в некоторых случаях затруднительно сравнивать разность между градиентами изменений высоты поверхностей дороги надлежащим образом.
[0059] С учетом вышеизложенного, в примерах, описанных в третьем-шестом вариантах осуществления, оценивается область существования уступа, в которой уступ существует в первой позиции (Pa1) определения уступа, и затем задается вторая позиция (Pa2) определения уступа, проходящая через область существования уступа. В частности, устройства (3-6) обнаружения уступов дополнительно включают в себя схему (21-24) оценки областей существования уступов для оценки области существования уступа, в которой уступ существует в первой позиции (Pa1) определения уступа. Схема 15 задания позиций определения уступов задает второе предварительно определенное направление и второе предварительно определенное расстояние таким образом, что вторая позиция (Pa2) определения уступа проходит через область существования уступа. Это позволяет приближать уступ, обнаруженный в первой позиции (Pa1) определения уступа, к уступу, обнаруженному во второй позиции (Pa2) определения уступа.
[0060] Как проиллюстрировано на фиг. 9, устройство 3 обнаружения уступов согласно третьему варианту осуществления включает в себя схему 21 оценки областей существования уступов для оценки области Q1 существования уступа на основе изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа. Другие конфигурации являются идентичными конфигурациям в устройстве 1 обнаружения уступов на фиг. 1. Следует отметить, что хотя здесь приводится описание для третьего варианта осуществления на основе устройства 1 обнаружения уступов на фиг. 1, третий вариант осуществления является применимым к устройству 2 обнаружения уступов на фиг. 7.
[0061] Как проиллюстрировано на фиг. 10 и 11, схема 21 оценки областей существования уступов указывает область, включающую в себя участок (HC) изменения высоты поверхности дороги и конечную точку LD уступа, из изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа (фиг. 4) и задает область в качестве области Q1 существования уступа. Схема 15 задания позиций определения уступов задает второе предварительно определенное направление и второе предварительно определенное расстояние таким образом, что вторая позиция (Pa2) определения уступа проходит через область Q1 существования уступа.
[0062] Диапазон глубин области Q1 существования уступа, например, может составлять длину одного бордюрного камня. Поиск в пределах длины одного бордюрного камня позволяет задавать вторую позицию определения уступа в диапазоне, в котором не изменяется наклон бордюра.
[0063] Горизонтальный диапазон области Q1 существования уступа может изменяться в соответствии с величиной изменения высоты. Предусмотрен стандарт сплошного блока, в котором градиент задается в диапазоне приблизительно 35-45 см от окрестности уступа вследствие дренажа и т.п., для блока с низким бордюрным камнем (символ B1 на фиг. 25(a)), используемого в окружении дороги в Японии. На основе стандарта для сплошного блока, горизонтальный диапазон может задаваться равным приблизительно 50 см с учетом разности между позицией (TD) изменения высоты и истинной конечной точкой LD уступа. Здесь, в стране, отличной от Японии, горизонтальный диапазон может задаваться равным предварительно определенному расстоянию на основе стандартов и т.п. в стране.
[0064] Помимо этого, блок с высоким бордюрным камнем (символ B2 на фиг. 25(b)) для задания границы между тротуаром и проезжей частью включает в себя только бордюрный камень без включения участка градиента на стороне проезжей части. Соответственно, участок градиента вокруг уступа формируется посредством поперечного градиента проезжей части. Это означает то, что градиент задается в расстоянии от всей проезжей части до конечной точки бордюра. В окружении дороги в Японии, даже если предварительно определенное расстояние в направлении ширины транспортного средства задается равным приблизительно 50 см для блока с низким бордюрным камнем, угол градиента не изменяется. Таким образом, можно корректно обнаруживать позицию конечной точки LD уступа. Здесь, поскольку вся проезжая часть имеет постоянный градиент, точность выше, когда вся проезжая часть включена в предварительно определенное расстояние. Это обусловлено тем, что отношение "сигнал-шум" данных измерений расстояния улучшается в отношении шумов. В свете этого, горизонтальный диапазон может изменяться в соответствии с изменением высоты, которое означает высоту блока бордюрного камня. Это обеспечивает возможность извлечения в необходимом и минимальном диапазоне, который имеет постоянный градиент, и позволяет более точно оценивать градиент поверхности дороги. Следовательно, позиция конечной точки LD уступа может обнаруживаться более точно.
[0065] Ниже описывается пример способа обнаружения уступов с использованием устройства 3 обнаружения уступов на фиг. 9 со ссылкой на фиг. 12. Последовательность операций обработки, проиллюстрированная на фиг. 12, многократно выполняется в предварительно определенных временных циклах. Фиг. 12 отличается от фиг. 6 тем, что этап S31 выполняется между этапами S09 и S11. Обработка, выполняемая на этапах S01-S17 на фиг. 12, является идентичной обработке на этапах S01-S17 на фиг. 6, и ее описания опускаются.
[0066] На этапе S31, схема 21 оценки областей существования уступов оценивает область Q1 существования уступа, в которой существует уступ (LD), из изменения высоты поверхности дороги в первой позиции (Pa1) определения уступа (фиг. 4). После этого процесс переходит к этапу 11, на котором схема 15 задания позиций определения уступов регулирует второе предварительно определенное направление и второе предварительно определенное расстояние, чтобы задавать вторую позицию (Pa2) определения уступа, которая проходит через область Q1 существования уступа.
[0067] Как описано выше, третий вариант осуществления предоставляет следующую работу и преимущества.
[0068] Оценивается область Q1 существования уступа, в которой уступ существует в первой позиции (Pa1) определения уступа, и задается вторая позиция (Pa2) определения уступа, проходящая через область Q1 существования уступа. Это позволяет приближать уступ, обнаруженный в первой позиции (Pa1) определения уступа, к уступу, обнаруженному во второй позиции (Pa2) определения уступа. Соответственно, можно сравнивать градиенты изменений высоты поверхностей дороги в почти идентичной позиции уступа. Это обеспечивает возможность более подходящей угловой настройки предварительно определенного направления относительно уступа (LD), что в свою очередь обеспечивает возможность более точного обнаружения позиции уступа (LD).
[0069] Поскольку область Q1 существования уступа оценивается на основе изменения высоты поверхности дороги в уступе первой позиции (Pa1) определения уступа, можно более точно оценивать область Q1 существования уступа. Как результат, можно приближать уступ в первой позиции (Pa1) определения уступа к уступу во второй позиции (Pa2) определения уступа. Соответственно, можно сравнивать градиенты изменений высоты поверхностей дороги в почти идентичной позиции уступа. Это обеспечивает возможность более подходящей угловой настройки предварительно определенного направления относительно уступа (LD), что в свою очередь обеспечивает возможность более точного обнаружения позиции уступа (LD).
[0070] Четвертый вариант осуществления
Устройство 4 обнаружения уступов согласно четвертому варианту осуществления многократно выполняет последовательность процессов обнаружения уступов в предварительно определенных временных циклах и оценивает область Q2 существования уступа на основе позиции уступа, обнаруженной в предыдущем цикле обработки.
[0071] Как проиллюстрировано на фиг. 13, устройство 4 обнаружения уступов согласно четвертому варианту осуществления включает в себя схему 22 оценки областей существования уступов для оценки области Q2 существования уступа на основе позиции уступа (LD), который ранее обнаружен. Другие конфигурации являются идентичными конфигурациям в устройстве 1 обнаружения уступов на фиг. 1. Следует отметить, что хотя здесь приводится описание для четвертого варианта осуществления на основе устройства 1 обнаружения уступов на фиг. 1, четвертый вариант осуществления является применимым к устройству 2 обнаружения уступов на фиг. 7.
[0072] В частности, схема 22 оценки областей существования уступов оценивает величину перемещения транспортного средства Vc в предварительно определенных временных циклах. Схема 22 оценки областей существования уступов оценивает позицию или область, в которой уступ (LD) предположительно должна обнаруживаться в это время, с использованием оцененной величины перемещения и позиционной информации относительно ранее обнаруженной конечной точки LD уступа. Другими словами, схема 22 оценки областей существования уступов оценивает область Q2 существования уступа из позиции конечной точки LD уступа, которая обнаружена в другое время. Например, как проиллюстрировано на фиг. 14, ранее обнаруженная позиция конечной точки LD уступа корректируется на величину перемещения транспортного средства. Из скорректированных позиций (FT1, FT2, FT3,..., FT10), область Q2 существования уступа задается в области, включающей в себя позицию (FT7), которая является ближайшей к первой позиции (Pa1) определения уступа. Область Q2 существования уступа задается в области, в которой центрируется ближайшая позиция (FT7). Альтернативно, область Q2 существования уступа может задаваться в области, в которой центрируется точка пересечения линии, соединяющей скорректированные позиции (FT1, FT2, FT3,..., FT10) и первую позицию (Pa1) определения уступа. Схема 15 задания позиций определения уступов регулирует второе предварительно определенное направление и второе предварительно определенное расстояние, чтобы задавать вторую позицию (Pa2) определения уступа, которая проходит через область Q2 существования уступа.
[0073] Ниже описывается пример способа обнаружения уступов с использованием устройства 4 обнаружения уступов на фиг. 13 со ссылкой на фиг. 15. Последовательность операций обработки, проиллюстрированная на фиг. 15, многократно выполняется в предварительно определенных временных циклах. Фиг. 15 отличается от фиг. 6 тем, что этап S41 выполняется между этапами S09 и S11. Обработка, выполняемая на этапах S01-S17 на фиг. 15, является идентичной обработке на этапах S01-S17 на фиг. 6, и ее описания опускаются.
[0074] На этапе S41, схема 22 оценки областей существования уступов оценивает величину перемещения транспортного средства Vc в предварительно определенных временных циклах. Затем схема 22 оценки областей существования уступов оценивает область Q2 существования уступа, с использованием величины перемещения и позиционной информации относительно ранее обнаруженной конечной точки LD уступа. После этого процесс переходит к этапу 11, на котором схема 15 задания позиций определения уступов регулирует второе предварительно определенное направление и второе предварительно определенное расстояние, чтобы задавать вторую позицию (Pa2) определения уступа, которая проходит через область Q2 существования уступа.
[0075] Как описано выше, четвертый вариант осуществления предоставляет следующую работу и преимущества.
[0076] Поскольку область существования уступа оценивается на основе ранее обнаруженной позиции уступа, можно более точно оценивать область Q2 существования уступа. Как результат, можно приближать уступ в первой позиции (Pa1) определения уступа к уступу во второй позиции (Pa2) определения уступа. Соответственно, можно сравнивать градиенты изменений высоты поверхностей дороги в почти идентичной позиции уступа. Это обеспечивает возможность более подходящей угловой настройки предварительно определенного направления относительно уступа (LD), что в свою очередь обеспечивает возможность более точного обнаружения позиции уступа (LD).
[0077] Пятый вариант осуществления
Устройство 5 обнаружения уступов согласно пятому варианту осуществления задает несколько первых позиций (Pa1) определения уступов в одном цикле обработки и пытается обнаруживать уступ на поверхности дороги для каждой первой позиции (Pa1) определения уступа. Затем область Q3 существования уступа оценивается на основе позиции уступа, которая успешно обнаружена.
[0078] Как проиллюстрировано на фиг. 16, устройство 5 обнаружения уступов согласно пятому варианту осуществления включает в себя схему 23 оценки областей существования уступов. Схема 15 задания позиций определения уступов задает несколько первых позиций (Pa1) определения уступов в одном цикле обработки. Схема 18 обнаружения уступов пытается обнаруживать уступ на поверхности дороги для каждой первой позиции (Pa1) определения уступа, и схема 23 оценки областей существования уступов оценивает область Q3 существования уступа на основе уступа (LD), который успешно обнаружен. Другие конфигурации являются идентичными конфигурациям в устройстве 1 обнаружения уступов на фиг. 1. Следует отметить, что хотя здесь приводится описание для пятого варианта осуществления на основе устройства 1 обнаружения уступов на фиг. 1, пятый вариант осуществления является применимым к устройству 2 обнаружения уступов на фиг. 7.
[0079] В частности, как проиллюстрировано на фиг. 17, схема 18 обнаружения уступов пытается обнаруживать уступ на поверхности дороги последовательно из первой позиции (Pa1) определения уступа ближе к датчику 12 расстояния в одном цикле обработки. Затем, из позиций (FS1, FS2) уступов, в которых обнаружение выполнено успешно, схема 23 оценки областей существования уступов выбирает позицию (FS2) уступа, ближайшую к первой позиции (Pa1) определения уступа, в которой обнаружение выполнено неудачно. Затем схема 23 оценки областей существования уступов оценивает область Q3 существования уступа в первой позиции (Pa1) определения уступа, в которой обнаружение выполнено неудачно, на основе выбранной позиции (FS2) уступа. Схема 15 задания позиций определения уступов регулирует второе предварительно определенное направление и второе предварительно определенное расстояние, чтобы задавать вторую позицию (Pa2) определения уступа, которая проходит через область Q3 существования уступа.
[0080] Следует отметить, что также можно пытаться обнаруживать уступ на поверхности дороги последовательно из первой позиции (Pa1) определения уступа, самой дальней от датчика 12 расстояния. Альтернативно, область Q3 существования уступа может оцениваться с использованием не только ближайшей позиции уступа, но также и дополнительно с использованием второй ближайшей позиции (FS1) и третьей ближайшей позиции уступа и т.д.
[0081] Ниже описывается пример способа обнаружения уступов с использованием устройства 5 обнаружения уступов на фиг. 16 со ссылкой на фиг. 18. Последовательность операций обработки, проиллюстрированная на фиг. 18, многократно выполняется в предварительно определенных временных циклах. Фиг. 18 отличается от фиг. 6 тем, что этап S51 выполняется между этапами S09 и S11. Помимо этого, содержание обработки на этапах S07 и S09 отличается от содержания обработки по фиг. 6. Обработка, выполняемая на других этапах, является идентичной обработке на фиг. 6, и ее описания опускаются.
[0082] На этапе S07, схема 15 задания позиций определения уступов задает несколько первых позиций (Pa1) определения уступов на поверхности дороги вокруг транспортного средства. В это время, схема 15 задания позиций определения уступов одновременно задает несколько первых позиций (Pa1) определения уступов без изменения первого предварительно определенного направления, но с изменением первого предварительно определенного расстояния.
[0083] Процесс переходит к этапу 09, на котором схема 15 задания позиций определения уступов вычисляет изменение высоты (первое изменение высоты) поверхности дороги в каждой первой позиции (Pa1) определения уступа на основе расстояний и направлений относительно объектов, полученных посредством арифметической схемы 14. Дополнительно, схема 18 обнаружения уступов пытается обнаруживать уступ для каждой первой позиции (Pa1) определения уступа.
[0084] Процесс переходит к этапу 51, на котором схема 23 оценки областей существования уступов выбирает позицию (FS2) уступа, ближайшую к первой позиции (Pa1) определения уступа, из позиций (FS1, FS2) уступов, которые успешно обнаружены. Затем схема 23 оценки областей существования уступов оценивает область Q3 существования уступа в первой позиции (Pa1) определения уступа на основе выбранной позиции (FS2) уступа.
[0085] Процесс переходит к этапу 11, на котором схема 15 задания позиций определения уступов регулирует второе предварительно определенное направление и второе предварительно определенное расстояние, чтобы задавать вторую позицию (Pa2) определения уступа, которая проходит через область Q3 существования уступа.
[0086] Как описано выше, пятый вариант осуществления предоставляет следующую работу и преимущества.
[0087] Задаются несколько первых позиций (Pa1) определения уступов, и обнаружение этапа на поверхности дороги предпринимается для каждой первой позиции (Pa1) определения уступа. Область Q3 существования уступа оценивается на основе позиций (FS1, FS2) уступов, которые успешно обнаружены. Это обеспечивает возможность более точной оценки области существования уступа. Как результат, можно приближать уступ в первой позиции (Pa1) определения уступа к уступу во второй позиции (Pa2) определения уступа. Соответственно, можно сравнивать градиенты изменений высоты поверхностей дороги в почти идентичной позиции уступа. Это обеспечивает возможность более подходящей угловой настройки предварительно определенного направления относительно уступа (LD), что в свою очередь обеспечивает возможность более точного обнаружения позиции уступа (LD).
[0088] Шестой вариант осуществления
Устройство 6 обнаружения уступов согласно шестому варианту осуществления оценивает позицию транспортного средства Vc на карте и оценивает область существования уступа на основе оцененной позиции транспортного средства Vc на карте.
[0089] Как проиллюстрировано на фиг. 19, устройство 6 обнаружения уступов согласно шестому варианту осуществления дополнительно включает в себя схему 26 получения данных карты для получения картографической информации относительно окрестностей транспортного средства и схему 25 оценки собственной позиции для оценки позиции транспортного средства Vc на карте. Схема 24 оценки областей существования уступов оценивает область существования уступа на основе оцененной позиции транспортного средства на карте. Следует отметить, что устройство 6 обнаружения уступов дополнительно может включать в себя GPS 27 и картографическую базу 28 данных. Альтернативно, устройство 6 обнаружения уступов может получать картографическую информацию относительно окрестностей транспортного средства Vc и информацию относительно собственной позиции посредством связи с внешней средой. Другие конфигурации являются идентичными конфигурациям в устройстве 1 обнаружения уступов на фиг. 1. Следует отметить, что хотя здесь приводится описание для шестого варианта осуществления на основе устройства 1 обнаружения уступов на фиг. 1, шестой вариант осуществления является применимым к устройству 2 обнаружения уступов на фиг. 7.
[0090] Картографическая информация, полученная посредством схемы 26 получения данных карты, включает в себя информацию дороги, указывающую форму проезжей части. Форма проезжей части представляет собой форму, заданную посредством уступа (LD). Схема 25 оценки собственной позиции оценивает позицию транспортного средства Vc на карте из информации собственной позиции, полученной из GPS 27, указывающей текущую позицию транспортного средства Vc. Это обеспечивает возможность оценки плоской формы уступа (LD) относительно транспортного средства Vc. Схема 24 оценки областей существования уступов оценивает область существования уступа на основе оцененной позиции транспортного средства Vc на карте и первой позиции (Pa1) определения уступа. В частности, схема 24 оценки областей существования уступов оценивает область существования уступа, в которой центрируется позиция пересечения контура проезжей части относительно транспортного средства Vc и первая позиция (Pa1) определения уступа.
[0091] Ниже описывается пример способа обнаружения уступов с использованием устройства 6 обнаружения уступов на фиг. 19 со ссылкой на фиг. 20. Последовательность операций обработки, проиллюстрированная на фиг. 20, многократно выполняется в предварительно определенных временных циклах. Фиг. 20 отличается от фиг. 6 тем, что этапы S61-S65 выполняются между этапами S09 и S11. Обработка, выполняемая на этапах S01-S17 на фиг. 20, является идентичной обработке на этапах S01-S17 на фиг. 6, и ее описания опускаются.
[0092] На этапе S61, схема 26 получения данных карты получает картографическую информацию, включающую в себя информацию дороги, указывающую форму проезжей части. Процесс переходит к этапу 63, на котором схема 25 оценки собственной позиции оценивает позицию транспортного средства Vc на карте из информации собственной позиции, полученной из GPS 27, указывающей текущую позицию транспортного средства Vc. Процесс переходит к этапу 65, на котором схема 24 оценки областей существования уступов оценивает область существования уступа на основе оцененной позиции транспортного средства Vc на карте и первой позиции (Pa1) определения уступа.
[0093] Процесс переходит к этапу 11, на котором схема 15 задания позиций определения уступов регулирует второе предварительно определенное направление и второе предварительно определенное расстояние, чтобы задавать вторую позицию (Pa2) определения уступа, которая проходит через область Q2 существования уступа.
[0094] Как описано выше, шестой вариант осуществления предоставляет следующую работу и преимущества.
[0095] Поскольку область существования уступа оценивается на основе позиции транспортного средства на карте, можно более точно оценивать область существования уступа. Как результат, можно приближать уступ в первой позиции определения уступа к уступу во второй позиции определения уступа. Соответственно, можно сравнивать градиенты изменений высоты поверхностей дороги в почти идентичной позиции уступа. Это обеспечивает возможность более подходящей угловой настройки предварительно определенного направления относительно уступа, что в свою очередь обеспечивает возможность более точного обнаружения позиции уступа.
[0096] Хотя выше описаны варианты осуществления согласно настоящему изобретению, не следует понимать, что описания и чертежи, составляющие часть этого раскрытия сущности, ограничивают настоящее изобретение. Это раскрытие сущности предоставит различные альтернативы, примеры и технологии работы для специалистов в данной области техники.
[0097] Первая модификация
Стереокамера в качестве датчика 12 расстояния может устанавливаться на поперечной стороне транспортного средства Vc, как проиллюстрировано на фиг. 22, а не в передней части транспортного средства Vc, и область захвата изображений стереокамеры может находиться на поперечной стороне транспортного средства Vc. Также в этом случае, первое предварительно определенное направление (Da1) задается в качестве направления движения транспортного средства Vc. Это обеспечивает возможность схеме 15 задания позиций определения уступов задавать первую позицию (Pa1) определения уступа, пересекающую уступ (LD) на поверхности дороги вокруг (на поперечной стороне) транспортного средства. В частности, можно задавать позицию (Pa1) определения уступа, которая находится от датчика 12 расстояния в первом предварительно определенном направлении (Da1) на первое предварительно определенное расстояние и идет в направлении, ортогональном к первому предварительно определенному направлению (Da1). Хотя иллюстрация опускается, вторая позиция (Pa2) определения уступа может задаваться аналогично.
[0098] Вторая модификация
Другой пример датчика 12 расстояния представляет собой лазерный дальномер (LRF). LRF испускает лазер в объекты вокруг транспортного средства и измеряет возвращаемый лазер, отражаемый посредством объектов. Таким образом, LRF измеряет направление, в котором располагается объект, на основе направления, в котором испускается лазер, и измеряет расстояние до объекта на основе времени от лазерного излучения до приема отраженного лазера. LRF также называется лазерным сканером. Диапазон излучения LRF может произвольно задаваться. Фиг. 23 иллюстрирует пример LRF на 360 градусов, в котором LRF (12) устанавливается в центре крыши транспортного средства Vc, и диапазон излучения задается в качестве всей окружности. Схема 15 задания позиций определения уступов задает первую позицию (Pa1) определения уступа, которая находится от датчика 12 расстояния в первом предварительно определенном направлении (Da1) на первое предварительно определенное расстояние и идет в направлении, ортогональном к первому предварительно определенному направление (Da1). Поскольку, аналогично примеру на фиг. 2 и 3, в которых датчик 12 расстояния устанавливается в передней части транспортного средства Vc, первое предварительно определенное направление Da1 задается в качестве направления движения транспортного средства Vc, первая позиция (Pa1) определения уступа, идущая в направлении ширины транспортного средства, задается впереди транспортного средства Vc. Хотя иллюстрация опускается, вторая позиция (Pa2) определения уступа может задаваться аналогично.
[0099] Следует отметить, что посредством установки LRF с углом снижения, можно наблюдать широкий диапазон направления движения транспортного средства в ходе движения. Альтернативно, может использоваться многослойный LRF, допускающий испускание нескольких из лазеров одновременно.
[0100] Способ обнаружения уступов с использованием лазерного дальномера (LRF) в качестве датчика 12 расстояния отличается тем, что этапы S71 и S73, проиллюстрированные на фиг. 24, выполняются вместо этапов S01-S05 на фиг. 6. Другие этапы S07-S13 являются идентичными этапам на фиг. 6, и их описания опускаются.
[0101] На этапе S71, LRF (12) измеряет направления для объектов, в которые испускается лазер, а также расстояния объектов. Данные измерений передаются в арифметическую схему 14. Процесс переходит к этапу 73, на котором арифметическая схема 14 преобразует данные измерений в системе полярных координат с LRF (12) в качестве начала координат в данные в ортогональной системе координат с транспортным средством Vc в качестве начала координат. Это обеспечивает возможность арифметической схеме 14 получать трехмерную информацию поверхности дороги вокруг транспортного средства. После этого, процесс переходит к этапу S07.
Список ссылочных обозначений
[0102] 1-6 - устройство обнаружения уступов
11 - модуль измерения расстояния
12 - датчик расстояния
13 - микрокомпьютер
14 - арифметическая схема
15 - схема задания позиций определения уступов
16 - схема вычисления высоты поверхности дороги
18 - схема обнаружения уступов
19 - первый модуль сравнения
20 - второй модуль сравнения
21-24 - схема оценки областей существования уступов
HC - участок изменения высоты поверхности дороги
Da1 - первое предварительно определенное направление
Da2 - второе предварительно определенное направление
Pa1 - первая позиция определения уступа
Pa2 - вторая позиция определения уступа
Rd - уступчатый участок
Rr - проезжая часть
Q1-Q3 - область существования уступа
LD - конечная точка уступа
Vc - транспортное средство.
Реферат
Настоящее изобретение относится к устройству обнаружения уступов и к способу обнаружения уступов для обнаружения уступа на поверхности дороги. Устройство обнаружения уступов определяет расстояние и направление относительно поверхности дороги вокруг транспортного средства. Датчик расстояния, смонтированный на транспортное средство, задает первую позицию определения уступа и вторую позицию определения уступа на поверхности дороги. Затем устройство обнаружения уступов вычисляет изменения высоты поверхностей дороги в первой позиции определения уступа и второй позиции определения уступа на основе расстояния и направления относительно поверхности дороги и обнаруживает уступ на поверхности дороги на основе одной из позиций определения уступов. Причем градиент изменения высоты поверхности дороги в одной из них больше. Техническим результатом является повышение точности обнаружения позиции уступа на поверхности дороги. 2 н. и 7 з.п. ф-лы, 25 ил.
Формула
2. Устройство обнаружения уступов по п. 1, в котором:
3. Устройство обнаружения уступов по п. 1 или 2, дополнительно содержащее схему оценки областей существования уступов, которая оценивает область существования уступа, в котором уступ существует в первой позиции определения уступа, при этом:
4. Устройство обнаружения уступов по п. 3, в котором:
5. Устройство обнаружения уступов по п. 3, в котором:
6. Устройство обнаружения уступов по п. 3, в котором:
7. Устройство обнаружения уступов по п. 3, дополнительно содержащее:
8. Устройство обнаружения уступов по п. 1, в котором:
9. Способ обнаружения уступов, содержащий этапы, на которых:
Комментарии