Способ отображения взаимного расположения фоноцелевой обстановки и боевой машины, оборудованной визирным устройством и спутниковой системой навигации - RU2781914C1
Код документа: RU2781914C1
Чертежи

Описание
«Способ…», обеспечивающий визуализацию пространственной ориентации объекта на цифровой карте местности, относится к методам ориентирования на местности.
Заявляемый «Способ…» решает проблему определения пространственной ориентации боевой машины, в частности, танка, с отображением на карте местности без использования инерциальной системы навигации за счет движения и/или привязки к карте по визуальному ориентиру и позволяет определить дирекционный угол без применения инерциальной системы навигации. «Способ…» значительно упрощает процесс топографической привязки, ориентирования, работу с объектами, нанесенными на цифровой карте местности в качестве целевых точек. Визуализация направления линии визирования на цифровой карте местности позволяет оперативно наводить прицел на интересующий объект на местности, например, нанесенный на карту в качестве цели. При этом повышается вероятность правильного позиционирования боевой машины и сокращается время на поиск цели и время, требуемое для прибытия в назначенную точку.
Технический результат - отображение дирекционного угла боевой машины и направления линии визирования на цифровой карте местности за счет данных спутниковой навигации и согласования линии визирования с топографической картой, позволяющее улучшить ситуационную осведомленность, командную управляемость без применения приборов и оборудования инерциальной системы навигации, сводя к минимуму некорректное отображение координат цели на цифровой карте местности
Инерциальный способ определения координат, описанный, например, в [1] как бесплатформенная инерциальная навигационная система (БИНС), осуществляет автоматическое определение пространственных углов объекта с отображением на электронной карте местности.
Наличие инерциальной навигационной составляющей позволяет определить пространственную ориентацию объекта в автоматическом режиме без необходимости привязки к визуальному ориентиру или выполнение маневра, предназначенного для определения вектора движения [2].
По публикациям [2] и [3], например, такое оборудование имеет довольно большие размеры и массу и затруднительно к размещению в уже сформированном внутреннем пространстве транспортного средства. Более того, применение высокоточной инерциальной навигационной системы значительно увеличивает стоимость и усложняет эксплуатацию объекта.
Более простым решением для определения координат, а также пространственной ориентации объекта являются спутниковые навигационные системы [4]. Спутниковые навигационные системы способны вычислять не только географические координаты, но и скорость объекта, а также направление его движения.
Заявляемый «Способ…» использует спутниковую навигационную систему, визирное устройство, выверенное с корпусом боевой машины, а также картографию, что позволяет определить дирекционный угол без применения инерциальной системы навигации и значительно упрощает процесс топографической привязки, ориентирования орудий и приборов, работу с объектами, нанесенными на цифровой карте местности в качестве целевых точек.
Осуществление заявляемого «Способа…» заключается в определяемом спутниковой навигационной системой отображении местоположения боевой машины на цифровой карте местности, при этом дополнительно индицируют направление оси корпуса упомянутой боевой машины и линии визирного устройства. Для первоначальной установки или уточнения дирекционного угла при неподвижной боевой машине согласуют условно-графическое обозначение боевой машины на карте с ее действительной ориентацией на местности, для чего указывают направление условной линии визирования, отображаемой на фоне цифровой карты местности, таким образом, чтобы объект на карте, через который проходит условная линия визирования, соответствовал ориентиру, наблюдаемому через визирное устройство. При движении боевой машины уточнение дирекционного угла обеспечивают линией вектора движения, определяемого спутниковой навигацией на прямолинейном участке траектории упомянутой боевой машины.
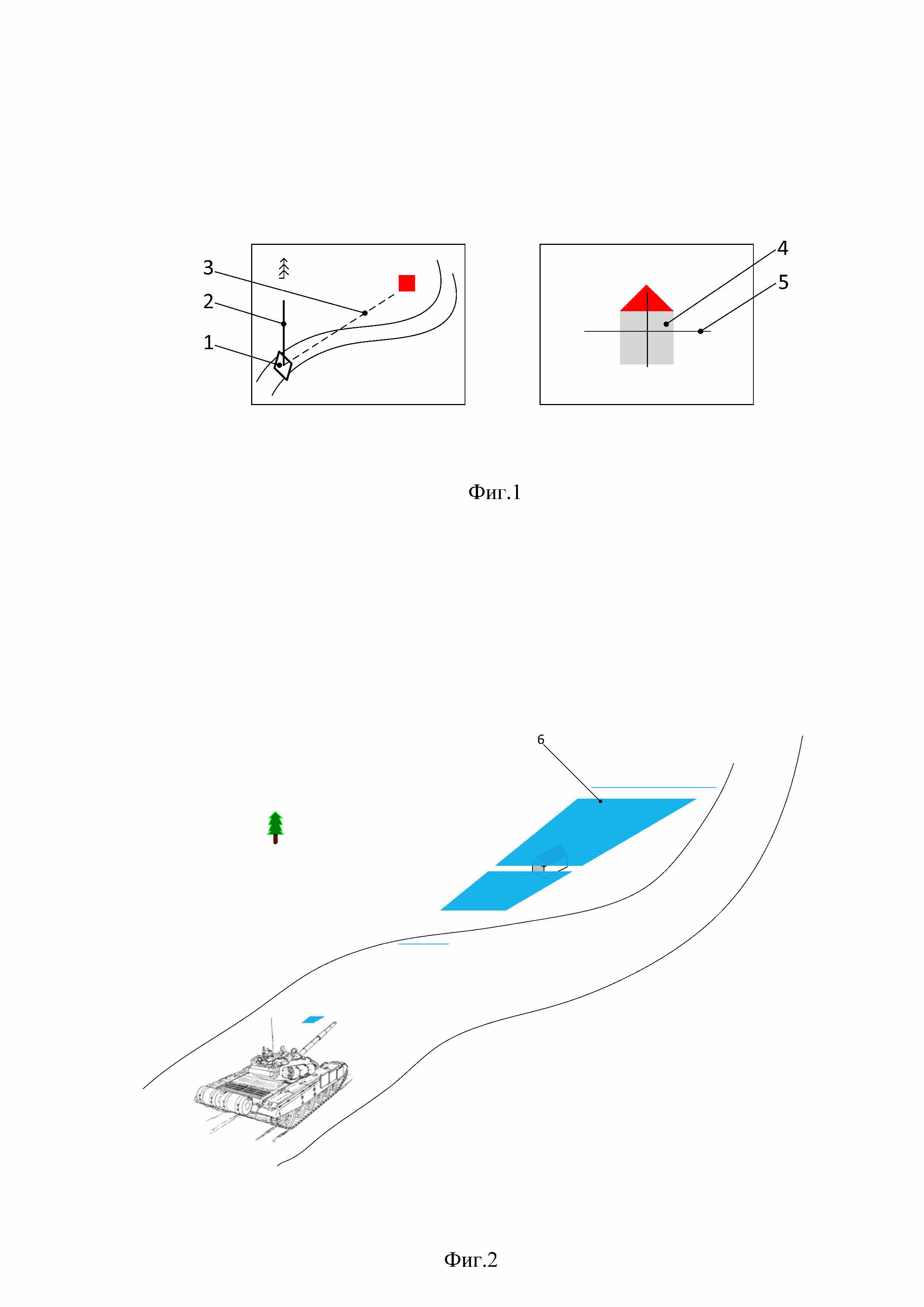
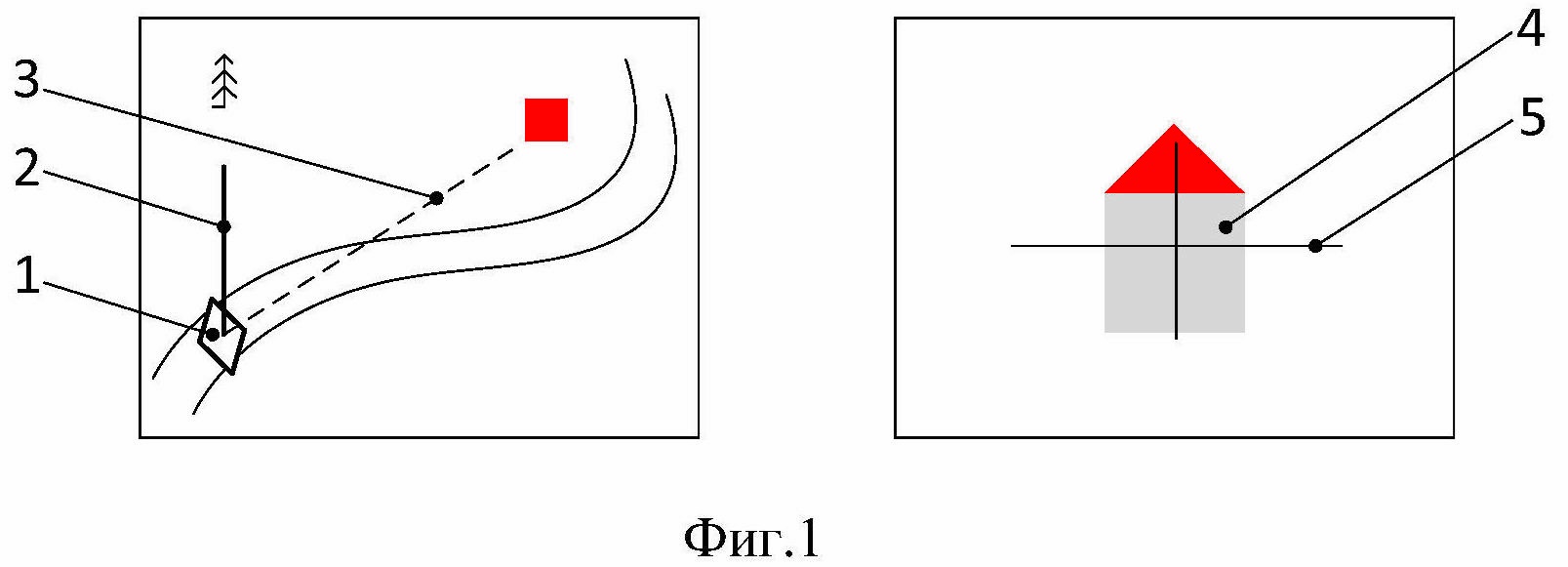
Осуществление заявляемого «Способа…» поясняют Фиг.1, показывающая информацию, наблюдаемую оператором на экранах навигационного устройства до согласования условно-графического обозначения боевой машины с цифровой картой местности; Фиг.2, несущая информацию о действительном расположении объектов на местности; Фиг.3 представляет собой информацию, наблюдаемую оператором на экранах навигационного устройства после согласования условно-графического обозначения объекта с цифровой картой местности. Позициями на Фиг.1 обозначено:
поз.1 – условно-графическое обозначение боевой машины, включающее обозначение носовой части для ориентирования, нанесенное на цифровую карту местности в точке с координатами, определенными спутниковой навигационной системой;
поз.2 – прямая, изображающая направление линии визирования относительно корпуса боевой машины;
поз.3 – направление, задаваемое оператором, как истинное направление линии визирования, определяемое с помощью пространственных данных цифровой карты местности и изображения, наблюдаемого в поле зрения визирного устройства;
поз.4 – ориентир, наблюдаемый в поле зрения визирного устройства, и обозначенный на цифровой карте местности;
поз.5 – прицельная марка в поле зрения визирного устройства, указывающая направление линии визирования.
Поз.6 на Фиг.2 обозначает поле зрения визирного устройства.
При этом согласование ориентации условно-графического обозначения боевой машины, направления линии визирования с цифровой картой местности с использованием картографии и дополнительных условно графических обозначений осуществляется в следующем порядке:
- оператор, ориентируясь по обстановке, наблюдаемой через визирное устройство, находит объект, который также представлен на цифровой карте местности и наводит на него прицельную марку;
- оператор указывает на цифровой карте местности положение объекта, наблюдаемого в данный момент в поле зрения визирного устройства, за счет чего задается текущий дирекционный угол объекта, используемый в дальнейшем для взаимного отображения фоноцелевой обстановки и собственного местоположения (Фиг. 1, поз. 1-5).
Осуществление заявляемого «Способа…» поясняет также Фиг.4, иллюстрирующая, в свою очередь, определение дирекционного угла с использованием накопленной информации о векторе движения боевой машины, где:
поз.7 – условно-графическое обозначение боевой машины до начала движения;
поз.8 – траектория движения боевой машины;
поз.9 – условно-графическое обозначение боевой машины после начала движения, с достоверным представлением на цифровой карте местности пространственной ориентации упомянутой боевой машины и направления линии визирования;
поз. 10 – условная прямая, характеризующая направление на север;
α0- дирекционный угол, принимаемый в качестве исходного для отображения условно-графического обозначения боевой машины до начала движения;
α1- дирекционный угол, уточненный в процессе движения боевой машины.
Таким образом, дирекционный угол, определенный с использованием накопленной информации о векторе движения боевой машины, уточняет дирекционный угол, определенный по визуальному ориентиру. Взаимное отображение пространственных данных и собственного местоположения боевой машины позволит осуществить визуализацию истинного направления корпуса упомянутой боевой машины на цифровой карте местности, что исключает необходимость выполнять поиск ориентиров на реальной местности и с учетом их взаимного расположения получать представление об ориентации боевой машины. Визуализация истинного направления корпуса боевой машины на цифровой карте местности в реальном масштабе времени позволит мгновенно принимать решение по направлению маневра, требующегося в текущей ситуации.
Визуализация на цифровой карте местности направления линии визирования позволяет оперативно наводить прицел на интересующий объект на местности, например, на объект, нанесенный на карту в качестве цели, при этом повышается вероятность правильного позиционирования боевой машины и сокращается время, требуемое для прибытия в назначенную точку, сокращается время на поиск целей.
При этом возможно уточнение дополнительных условно-графических обозначений, описанных при расшифровке позиций Фиг.1, Фиг.2, Фиг.3, Фиг.4.
Заявляемый «Способ…» позволит определить дирекционный угол без применения инерциальной системы навигации, что значительно упрощает процесс топографической привязки, ориентирования орудий и приборов, определение координат целей и отображение их на карте. При этом повышается вероятность правильного позиционирования боевой машины и сокращается время на поиск цели и время, требуемое для прибытия в назначенную точку.
Авторам заявляемого «Способа отображения взаимного расположения фоноцелевой обстановки и боевой машины, оборудованной визирным устройством и спутниковой системой навигации» неизвестно использование спутниковой навигации как инструмента для представления информации о дирекционном угле, определенном с использованием визуального ориентира на цифровой карте местности и уточняемым накопленной информации о векторе движения упомянутой боевой машины.
Литература
1. Портнов Б.И. и др. Бесплатформенная инерциальная навигационная система. Патент РФ № 2704198. МПК G01C 21/00, G01C 19/66. Приоритет от 28.03.2019, опубл. 24.10.2019, бюлл. № 30. Патент действует.
2. Инерциальная навигационная система: общие сведения, принцип действия, классификация и способы ориентации. [Электронный ресурс] URL: https://abc-import.ru/gps/1834-inercialnaja-navigacionnaja-sistema-obshhie-svedenija-princip-dejstvija-klassifikacija-i-sposoby-orientacii/ (обращение 10.03.2021 г.).
3. Бесплатформенная инерциальная навигационная система. [Электронный ресурс] URL: http://www.bntu.by/bins.html (обращение 10.03.2021 г.).
4. Навигационная система. [Электронный ресурс] URL: https://glonass-std.ru/sistemy-navigatsii/vidy-navigatsionnyh-sistem.html (обращение 10.03.2021 г.).
Реферат
Изобретение относится к области систем ориентирования на местности. Техническим результатом является отображение дирекционного угла боевой машины и направления линии визирования на цифровой карте местности за счет данных спутниковой навигации и согласования линии визирования с топографической картой, позволяющее улучшить характеристики ситуационной осведомленности, командной управляемости без применения приборов и оборудования системы навигации, сводя к минимуму некорректное отображение координат цели на цифровой карте местности. Предложен способ отображения взаимного расположения фоноцелевой обстановки и боевой машины, заключающийся в определяемом спутниковой навигационной системой отображении местоположения боевой машины на цифровой карте местности, при этом дополнительно индицируют направление оси корпуса упомянутой боевой машины и линии визирного устройства. Для первоначальной установки или уточнения дирекционного угла при неподвижной боевой машине согласуют условно-графическое обозначение боевой машины. Пульсирующая линия визирования на фоне цифровой карты местности указывает на визуально определенный ориентир. При движении боевой машины уточнение дирекционного угла обеспечивают выделением сплошной линией вектора движения, определяемого спутниковой навигацией на прямолинейном участке траектории упомянутой боевой машины. 4 ил.
Комментарии