Радиолокационный способ мониторинга геодезического створа высотных плотин гэс - RU2760505C1
Код документа: RU2760505C1
Чертежи


Описание
Заявляемый способ измерения геометрического смещения верхнего створа высотных плотин радиолокационным методом, относится к системе радиолокации и может быть использован также для оперативного наблюдения за отклонением от вертикали высотных зданий, телевизионных башен и других строительных сооружений.
Известен и широко используется на практике способ триангуляционного измерения поверхностей объектов, в котором облучают поверхность объекта плоским зондирующим лазерным лучом, формируют на поверхности объекта линию сканирования, регистрируют отраженное световое излучение в плоскости изображения, ориентированной в соответствии с условием Шеймпфлуга, определяют расстояние до линии сканирования и получают информацию о профиле объекта, отличающийся тем, что плоскость зондирующего лазерного луча ориентируют таким образом, что его проекция на поверхности объекта образует угол 3 с плоскостью, перпендикулярной плоскости триангуляции, в направлении по или против часовой стрелки, а плоскость изображения наклоняют на угол 9 относительно плоскости триангуляции в направлении по или против часовой стрелки, соответственно, согласно выражению θ=arctg[(0,1-0,3)tgβ (патент РФ 2315949 С2, дата приоритета 27.02.2006, дата публикации 27.01.2008, авторы: Венедиктов А.З., Тирешкин В.Н.).
Недостатком этого способа является трудоемкость, длительное время измерений, потребность в хороших метеоусловиях. По этим причинам мониторинг створа производят с длительными периодами, два-три раза в год.
Известен способ мониторинга створа, реализуемый при помощи геодезической лазерной дальномерной станции «Leica ScanStation СЮ» (B.C. Михеев «Геодезические светодальномеры» М. Недра, 1979, с 222).
Недостатками данной системы является высокая стоимость и сильное влияние метеоусловий (туман, осадки, брызги) на скорость распространения оптических колебаний, вносящую большие погрешности на измерение дальности. Заменить на патент времяпролетное сканирование
Наиболее близким техническим решением к заявляемому является радиогеодезический способ дальнометрии, основанный на измерении расстояний путем регистрации разности времени прохождения радиосигнала радиолокационным методом с измерением времени и фазы задержки отраженного радиосигнала от наблюдаемого объекта (Лобачев В.М. «Радиоэлектронная геодезия», М. Недра, 1980, с 327).
Этот способ позволяет измерять расстояние с точностью 1-10 м, что недостаточно для дистанционного мониторинга створов плотин и ряда других объектов с требуемой погрешностью ±1 мм с дистанции порядка 1000 м [3].
Технической проблемой, которую решает заявленное изобретение, является реализация дистанционного оперативного мониторинга крупных строительных сооружений типа створов плотин ГЭС с высокой точностью в любых метеоусловиях.
П. 1 Задача решается тем, что вдоль верхнего створа устанавливается система отражающих уголковых маркеров, дистанционно створ облучается радиолокатором и измеряется разность фаз несущей частоты излученного и отраженного от маркеров радиосигналов, расположенных вдоль створа плотины, отличающийся тем, что система дополняется эталонным маркером, установленным на берегу рядом с плотиной, маркеры поочередно модулируются сигналами низкой частоты, в приемнике РЛС измеряется и запоминается фаза отраженного сигнала от эталонного маркера, которая затем сравнивается с фазой отраженного сигнала от первого маркера, установленного на створе, из разности фаз выделяют геометрические смещения между соседними маркерами так, что после облучения пар всех маркеров, строится огибающая геометрических смещений блоков плотины (геодезический створ).
П. 2 Способ по П. 1, отличающийся тем, что фазу отраженного радиосигнала измеряют в хорошую погоду, усредняют результат в течение длительного времени, вычисляют и запоминают скорость распространения радиоволн и расстояние между РЛС и эталонным маркером, которое при облучении всех маркеров, считается опорным, относительно которого затем строится огибающая сдвигов блоков створа.
П. 3 Способ по П. 1, отличающийся тем, что разность фаз отраженных сигналов двух соседних маркеров определяет путем сдвига частоты автогенератора в приемнике РЛС и его автоподстройки сигналом управления от фазового детектора, измеряющего сдвиг фаз отраженных сигналов от двух соседних маркеров.
Технический результат достигается за счет
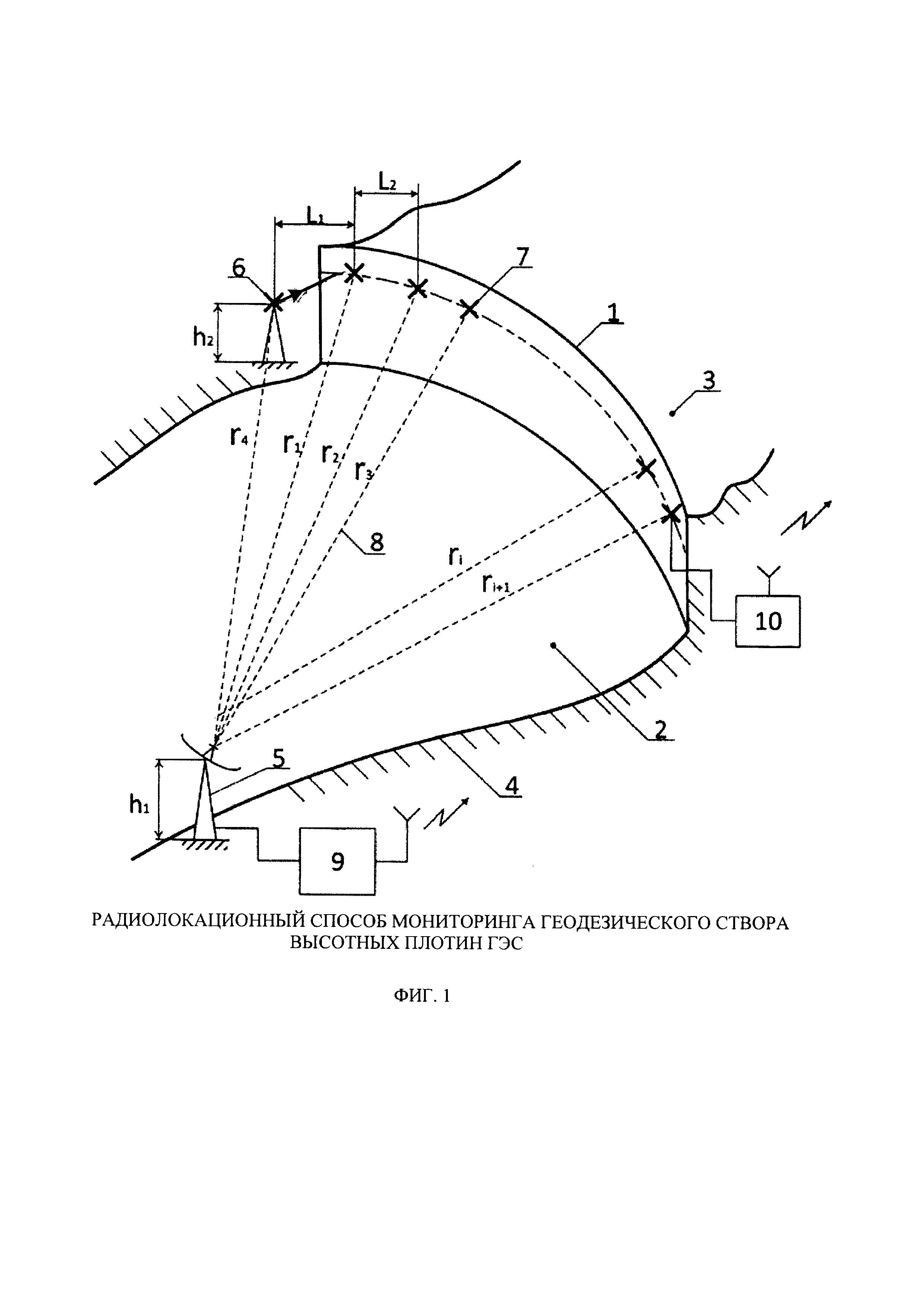
На фиг. 1 представлена схема измерений геодезического створа арочной плотины Саяно-Шушенской ГЭС заявленным способом: 1 - тело плотины; 2 - нижний бьеф; 3 - верхний бьеф; 4 - береговая линия; 5 - радиолокатор (РЛС); 6 - эталонный отражатель (маркер); 7 - измерительные маркеры; 8 - расстояния прямой видимости между РЛС и маркерами; 9, 10 - радиостанции передачи сигналов связи и синхронизации между РЛС, системой маркеров и оператором станции.
На фиг. 2 представлена схема аппаратного комплекса РЛС, где изображены: 11 - передатчик РЛС; 12 - передающая антенна; 13 - сечение диаграммы направленности антенны (ДН) в районе плотины; 15 - сечение области отражения маркера; 14 - приемная горизонтальная антенна (фазированная антенная решетка ФАР), 10 - синтезатор частот; 16 - малошумящий усилитель приемника; 17 - первый смеситель; 18 - усилитель первой промежуточной частоты (УПЧ); 19 - блок череспериодной компенсации; 20 - второй смеситель; 21 - УПЧ-2; 22 - фазовый детектор, 23 - блок фазовой автоподстройки частоты(ФАПЧ); 24 - управляемый автогенератор; 25 - измеритель разности частот; 26 -измеритель разности фаз; 27 - микроконтроллер.
На фиг. 3 изображены временная эпюра излучаемых (а), принимаемых сигналов (б)
и спектр принимаемого радиосигнала (в).
Представленный на фигурах способ реализуется следующим образом. На левом берегу реки в нижнем бьефе ГЭС на расстоянии 1-2 км устанавливается радиолокатор 5 на высоте h1 от уровня горизонта; на правом берегу реки вблизи плотины на высоте h2 - располагают эталонный маркер 6; вдоль верхнего створа плотины монтируют линейную систему измерительных маркеров 7. Пути прохождения радиосигналов от маркеров отмечены расстояниями соответственно r1, r2, … ri. Створ плотины 1 смещается по горизонтали под действием давления воды в водохранилище 3. Синтезатор 10 генерирует сетку рабочих частот излучаемого передатчиком 11 радиосигнала ƒе=10 ГГц, и частоты первого ƒr1=11 ГГц и второго гетеродинов ƒr2=1,1 ГГц. С выхода передатчика радиосигнал поступает на линейную вертикальную фазированную антенную решетку ФАР 12,формирующую на стене верхнего створа плотины, узкую по вертикали и широкую по горизонтали 9 диаграмму направленности.
Приемная горизонтальная ФАР 14 формирует узкий луч с сечением 15, сканируемый по горизонтали.
Принимаемый сигнал поступает с ФАР 14 через МШУ 16 на первый смеситель 17, на выходе которого образуется сигнал первой промежуточной частоты ƒr1=1,1 ГГц. Далее через УПЧ - 18 этот сигнал проходит блок черезпериодной компенсации 19, компенсирующий радиосигналы, отраженные от всей верхней полусферы на частоте ƒс=10 ГГц, не содержащие частоты модуляции маркеров FM=100 кГц и таким образом на второй смеситель 20 проходит сигнал второй промежуточной частоты ƒП2=100 МГц, поступающий через УПЧ 21 на фазовый детектор 22. На второй вход фазового детектора 22 поступает сигнал опорной частоты ƒОП=100 МГц через систему фазовой автоподстройки частоты ФАПЧ 23 от автогенератора 24, непрерывно подстраиваемого по частоте через систему ФАПЧ, так что в каждый из периодов коммутации маркеров Т частота автогенератора соответствует отраженному радиосигналу от очередного маркера. С измерителя разности частот 25, соответствующей фазовому сдвигу радиосигналов между двумя соседними маркерами ϕi-ϕi+1. Цифровые сигналы поступают на схему запоминания этой разности 26 и далее в память микроконтроллера 27. Измеренное значение сдвига свора Δr транслируются через радиостанцию 9 на индикатор оператора ГЭС.
Передатчик РЛС 11 формирует в антенне импульсные радиосигналы фиг. 3 а, позволяющие отстроиться по времени от мешающих сигналов, отраженных от подстилающей поверхности, приходящих в приемник с запаздыванием относительно сигналов прямой видимости.
В спектре сигналов, отраженных маркерами, появляются составляющие верхних и нижних комбинационных частот ƒ±FM с частотой модуляции маркеров FM=100 кГц.
Период облучения всех маркеров составляет величину n⋅Т, где n - число маркеров. Время коммутации отдельного маркера выбирается порядка Т=1 с. Если при длине створа 800 м расположить 100 маркеров через каждые 8 м, то общее время обзора створа составит 100 с.
Таким образом, заявленный способ позволяет многократно в течение суток освещать весь створ и за счет усреднения показаний получить высокую точность построения створа, не менее чем 1 мм.
Конструктивно система маркеров оформляется в виде металлической или пластмассовой трубы, со щелями в которых устанавливаются уголковые отражатели. Синхронизацию управления включением маркеров и сканирование приемной ФАР осуществляется через радиостанцию 9, что дает возможность одновременного радиоизлучения отраженного от маркера сигнала и переключения луча приемной ФАР на излучающий маркер.
Введение в приемники системы пересчета фазового сдвига Δϕ в частоту с помощью автогенератора 24 и ФАПЧ 23 позволяет измерить это приращение с высокой точностью недостигаемой фазометрами.
Поскольку Δϕ=ϕi+1-ϕi=ω⋅с(t+Δϕ)-ω⋅c(t)=ω⋅Δt
где

с=3⋅108 - скорость света, то

Имея в виду, что при преобразовании частоты в смесителях фазовый сдвиг сигнала ƒc переносится на промежуточную частоту ƒПР, то справедливо соотношение:

Откуда измеряемое приращение частоты автогенератора управляемого ФАПЧ будет равно при смещении створа на Δr=1 мм:

Таким образом, в потенциале, при минимальных шумах на входе приемника, частотный способ измерения фазового сдвига позволяет измерить расстояние с точностью до микрон.
Преимуществом заявленного способа является возможность реализовать постоянный дистанционный и более точный мониторинг смещения тела плотины ГЭС независимо от метеоусловий.
Реферат
Изобретение относится к системе радиолокации и может быть использовано для оперативного наблюдения за отклонением от вертикали высотных зданий, телевизионных башен и других строительных сооружений. Техническим результатом заявленного изобретения является реализация дистанционного оперативного мониторинга крупных строительных сооружений типа створов плотин ГЭС с высокой точностью в любых метеоусловиях. В заявленном способе вдоль верхнего створа устанавливают систему отражающих уголковых маркеров. Створ плотины дистанционно облучают радиолокатором и измеряют разность фаз несущей частоты излученного и отраженного от маркеров радиосигналов. Система дополнена эталонным маркером, установленным на берегу рядом с плотиной. Маркеры поочередно модулируются сигналами низкой частоты, а в приемнике РЛС измеряется и запоминается фаза отраженного от эталонного маркера сигнала, которая затем сравнивается с фазой сигнала от первого маркера, установленного на створе. Из разности фаз выделяют геометрические смещения между соседними маркерами. После облучения всех маркеров строится огибающая геометрических смещений блоков плотины (геодезический створ). 2 з.п. ф-лы, 3 ил.
Комментарии