Способ определения размерных параметров газотурбинного двигателя - RU2016151767A
Код документа: RU2016151767A
Формула
1. Способ определения размерных параметров газотурбинного двигателя, содержащего корпус (1) и диск (2), на котором закреплена по меньшей мере одна лопатка (3), при этом указанный корпус окружает диск и указанную по меньшей мере одну лопатку, указанный диск (2) приводится во вращение валом (4) вокруг оси, называемой осью (z) газотурбинного двигателя, и указанная лопатка содержит переднюю кромку (BA) и заднюю кромку (BF), включающий этапы, осуществляемые средствами (6) обработки данных, на которых:
получают (E1) предварительно определенные координаты (P) концов передней кромки и задней кромки лопатки в системе координат, связанной с диском (Xb,Yb,Zb);
на основании полученных координат (P) выражают (E2) координаты (P') верхних концов передней кромки и задней кромки лопатки в системе координат, связанной с корпусом (xc,yc,zc);
вычисляют (E3) расстояние (g) между корпусом и концами передней кромки и задней кромки лопатки на основании координат (P') концов передней кромки и задней кромки лопатки в системе координат, связанной с корпусом (xc,yc,zc);
вычисляют (E4) нормальное pN и тангенциальное pT контактные давления между лопаткой и корпусом вдоль конца лопатки на основании вычисленного расстояния (g);
вычисляют (E5) нормальную (FN) и тангенциальную (FT) силы реакции и нормальный (MN) и тангенциальный (MT) моменты реакции, появляющиеся в результате контакта между лопаткой и корпусом, на основании вычисленных давлений;
определяют размерные параметры (E6) газотурбинного двигателя в зависимости от вычисленных расстояний, давлений, сил и моментов.
2. Способ по п. 1, в котором координаты концов передней кромки и задней кромки лопатки в системе координат, связанной с корпусом (xc,yc,zc), выражают (E2) в виде зависимости от степеней свободы диска, корпуса и лопатки.
3. Способ по п. 2, в котором указанные степени свободы выбирают среди поступательного и вращательного движения диска и корпуса, прогиба лопатки на вершине и радиальной деформации корпуса.
4. Способ по п. 2 или 3, в котором указанные степени свободы выбирают из следующей группы:
поступательное перемещение диска на первую длину xd(t) и вторую длину (yd(t)) вдоль двух осей (х,y), поперечных к оси (z) газотурбинного двигателя, причем указанные две поперечные оси (х,y) и ось (z) газотурбинного двигателя образуют первую систему координат (x,y,z), связанную с валом;
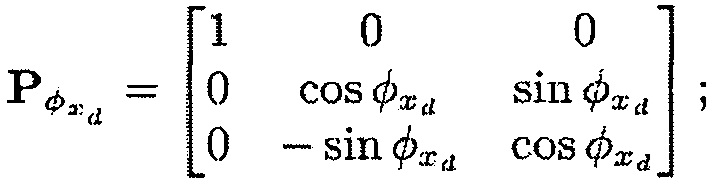
поворот диска на первый угол (ϕxd(t)) вокруг первой оси указанной первой системы координат (x), при этом получают вторую систему координат (x1,y1,z1) посредством поворота первой системы координат (x,y,z) на указанный первый угол (ϕxd(t)) вокруг указанной первой оси первой системы координат (x);
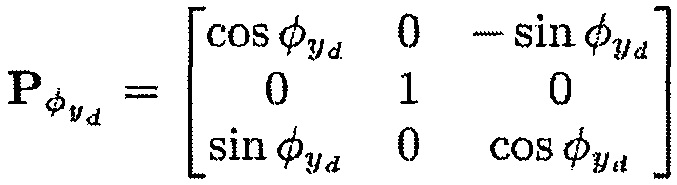
поворот диска на второй угол (ϕyd(t)) вокруг второй оси указанной второй системы координат (y1), при этом получают третью систему координат (x2,y2,z2) посредством поворота второй системы координат (x1,y1,z1) на указанный второй угол (ϕyd(t)) вокруг второй оси второй системы координат (y1);
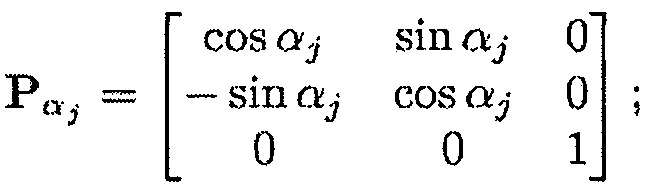
угловое позиционирование лопатки относительно второй оси указанной третьей системы координат (y2), при этом указанное угловое позиционирование соответствует повороту на третий угол (αj) вокруг третьей оси указанной третьей системы координат (z2), при этом система координат, связанная с диском (Xb,Yb,Zb), образует четвертую систему координат, получаемую посредством поворота третьей системы координат (x2,y2,z2) на указанный третий угол (αj) вокруг третьей оси указанной третьей системы координат (z2);
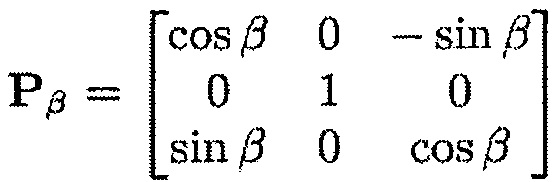
прогиб лопатки на ее вершине на третью длину (xb(t)) вдоль первой оси (xb) пятой системы координат (xb,yb,zcb), полученной посредством поворота четвертой системы координат (Xb,Yb,Zb) на четвертый угол (β) вокруг второй оси указанной четвертой системы координат (Yb);
поступательное перемещение корпуса на четвертую длину xc(t) и пятую длину (yc(t)) вдоль двух первых осей указанной первой системы координат (х,y);
поворот корпуса на пятый угол (ϕxc(t)) вокруг первой оси указанной первой системы координат (x), при этом получают шестую систему координат (xc1,yc1,zc1) посредством поворота первой системы координат (x,y,z) на пятый угол (ϕxc(t)) вокруг первой оси первой системы координат (x);
поворот корпуса на шестой угол (ϕyc(t)) вокруг второй оси указанной первой системы координат (y), при этом поучают систему координат (xc,yc,zc), связанную с корпусом, посредством поворота шестой системы координат (xc1,yc1,zc1) на шестой угол (ϕyc(t)) вокруг второй оси первой системы координат (y);
радиальная деформация корпуса на шестую длину (u(α,t)) относительно радиуса корпуса (Rc).
5. Способ по п. 4, в котором координаты P' концов передней кромки и задней кромки лопатки, выраженные в системе координат, связанной с корпусом (xc,yc,zc), выражают (E2) при помощи следующей формулы:

где:




Pαj - матрица перехода, связанная с угловым позиционированием лопатки на диске,
Рβ - матрица перехода, связанная с ориентацией прогиба лопатки на ее вершине,
и

6. Способ по п. 5, в котором, учитывая, что внутренняя поверхность корпуса образует круговой конус с углом θ, радиусом основания Rb и с высотой h, расстояние g между корпусом и концами передней кромки и задней кромки лопатки вычисляют (E3) при помощи следующей формулы:

где
7. Способ по любому из пп. 1-6, в котором при вычислении (E4) давлений применяют функцию формы, адаптированную к указанному концу лопатки и к профилю первоначального зазора.
8. Способ по любому из пп. 1-7, в котором контактные давления вычисляют (E4) вдоль хорды, которая предполагается прямолинейной, имеет длину lc и образует конец лопатки, посредством линейной интерполяции на основании вычисленных расстояний между корпусом и верхними концами передней кромки и задней кромки лопатки.
9. Способ по п. 8, в котором нормальное pN и тангенциальное pT контактные давления в любой точке указанной хорды вычисляют (E4) при помощи следующих формул:


где
и
при этом c обозначает абсциссу положения вдоль указанной хорды, изменяющуюся между -lc/2 и +lc/2, и kr и kt обозначают нормальную и тангенциальную жесткости при контакте.
10. Способ по п. 9, в котором нормальную FN и тангенциальную FT силы реакции и нормальный MN и тангенциальный MT моменты реакции, появляющиеся в результате контакта между лопаткой и корпусом, вычисляют (E5) при помощи следующих формул:

при этом c1 и c2 обозначают минимальную и максимальную абсциссы совокупности положений хорды лопатки, входящей в контакт с корпусом.
11. Компьютерный программный продут, содержащий командные коды для осуществления способа определения размерных параметров по любому из пп. 1-10, когда эту программу исполняет процессор.
12. Устройство (7) для определения размерных параметров газотурбинного двигателя, содержащее средства (6) обработки данных, включающие в себя:
модуль для получения предварительно определенных координат (P) концов передней кромки (BA) и задней кромки (BF) лопатки газотурбинного двигателя в системе координат, связанной с диском газотурбинного двигателя (Xb,Yb,Zb), при этом указанный газотурбинный двигатель содержит корпус и указанный диск, на котором закреплена по меньшей мере одна указанная лопатка, при этом указанный корпус окружает диск и указанную по меньшей мере одну лопатку, указанный диск приводится во вращение валом вокруг оси, называемой осью (z) газотурбинного двигателя;
модуль для выражения координат (P') верхних концов передней кромки и задней кромки лопатки в системе координат, связанной с корпусом (xc,yc,zc), на основании указанных полученных координат;
модуль вычисления расстояния (g) между корпусом и указанными концами передней кромки и задней кромки лопатки на основании координат (P') концов передней кромки и задней кромки лопатки в системе координат, связанной с корпусом (xc,yc,zc);
модуль вычисления нормальных (pN) и тангенциальных (pT) контактных давлений между лопаткой и корпусом вдоль конца лопатки на основании вычисленного расстояния (g);
модуль вычисления нормальной (FN) и тангенциальной (FT) сил реакции и нормального (MN) и тангенциального (MT) моментов реакции, появляющихся в результате контакта между лопаткой и корпусом на основании вычисленных давлений;
модуль определения размерных параметров газотурбинного двигателя в зависимости от вычисленных расстояний, давлений, сил и моментов.
Комментарии