Робот и способ измерения пространственной кривой трубопровода - RU2748786C1
Код документа: RU2748786C1
Чертежи



Описание
Область техники
Настоящее изобретение относится к области инженерной геодезии и технологий для измерения трубопроводов, и, в частности, оно относится к роботу и способу измерения пространственной кривой трубопровода, основанных на устройстве измерения инерции/пройденного пути.
Предпосылки изобретения
Трубопровод представляет собой часто встречающуюся линейную канальную конструкцию, которая не только может применяться для транспортировки текучих веществ, например для транспортировки природного газа, нефти, воды и прочих веществ, но и может служить каналом для работы устройств, таким как трубопровод для наблюдения за деформацией структуры грунта. Измерение трубопровода обычно подразумевает измерение трехмерной кривой трубопровода. Сегодня часто применяемые измерения трубопроводов обычно выполняются для целей управления и контроля и используются для выяснения положения и направления прохождения трубопроводов, как, например, при измерении нефтепроводов, измерении подземных трубопроводных линий и т. п. В зависимости от относительного положения измерительной аппаратуры и трубопровода можно выделить измерения трубопровода снаружи и измерения трубопровода изнутри. При этом в случае измерений трубопровода снаружи для измерения положения и направления прохождения трубопровода обычно используются электромагнитные волны, звуковые волны, устройства для обнаружения неисправностей и прочие средства. Из-за препятствий от слоя земли точность обычно посредственная, максимально на уровне дециметров. В случае измерений трубопровода изнутри для проведения измерений обычно применяются роботы для измерения кривой трубопровода; сегодня во многих роботах для измерения кривой трубопровода применяется сочетание из гироскопа/датчиков измерения пройденного пути, при этом механическая конструкция позволяет роботам для измерения кривой двигаться по линии центра трубопровода. Однако ввиду проектирования механической конструкции, размещения датчиков, алгоритмов проведения расчетов и прочих причин сегодня наиболее высокая точность измерения у большинства роботов для измерения кривой трубопровода находится на уровне сантиметров (на 100 метров), что может использоваться лишь для общепринятых измерений положения и направления прохождения трубопровода. В целом, максимальная точность, обеспечиваемая существующими технологиями измерения трубопроводов, может измеряться лишь на уровне сантиметров. Обычно точность при отслеживании деформации должна находиться на уровне миллиметров (на 100 м длины трубопровода), и существующие способы и устройства для измерения не могут удовлетворять требованиям в отношении отслеживания деформации трубопроводов. Поэтому существующие технологии требуют дальнейшего улучшения.
Суть изобретения
С учетом вышеизложенных недостатков аналогов, известных из уровня техники, цель настоящего изобретения заключается в предоставлении робота и способа измерения пространственной кривой трубопровода, посредством которых преодолеваются недостатки, связанные с тем, что точность измерения у измерительных устройств, известных из уровня техники, находится лишь на уровне сантиметров, поэтому не могут удовлетворяться требования в отношении отслеживания деформации трубопроводов.
В первом варианте осуществления согласно настоящему изобретению предложен робот для измерения пространственной кривой трубопровода, который содержит:
камеру для электронных компонентов; направляющие стержни, центрально прикрепленные к указанной камере для электронных компонентов с двух сторон; держатели колес, которые соединены с указанными направляющими стержнями посредством линейных подшипников; по меньшей мере две группы ходовых колес, равномерно распределенных и установленных на указанных держателях колес; по меньшей мере одну группу колес для измерения пройденного пути, расположенных на направляющем стержне с одной стороны указанной камеры для электронных компонентов и установленных на опорах колес, выполненных с возможностью независимого втягивания; и кодирующие устройства, установленные на всех указанных колесах для измерения пройденного пути; при этом на направляющих стержнях с двух сторон относительно указанных линейных подшипников установлены пружины;
в указанной камере для электронных компонентов установлены: модуль измерения инерции, установленный на плате сбора данных, блок управления сбором данных и блок питания;
все указанные ходовые колеса посредством указанных пружин выполнены с возможностью синхронного втягивания для обеспечения расположения геометрического центра указанного модуля измерения инерции на линии центральной оси указанной камеры для электронных компонентов;
указанный блок управления сбором данных предназначен для управления модулем измерения инерции и кодирующими устройствами для сбора данных измерений и для сравнения указанных данных измерений с данными пространственной кривой трубопровода в исходный момент времени для получения степени деформации пространственной кривой трубопровода.
При необходимости указанный блок управления сбором данных дополнительно снабжен модулем FPGA и модулем кварцевого генератора;
указанный модуль измерения инерции связан с указанным модулем FPGA посредством интерфейса преобразования сигнала RS-422 в сигнал LVTTL;
указанный модуль FPGA посредством соответственно UART-интерфейса и интерфейса преобразования сигнала с USB-порта на последовательный порт устанавливает коммуникационное соединение с главным компьютером; и предназначен для осуществления на основании тактового сигнала от указанного модуля кварцевого генератора запуска и управления в отношении модуля измерения инерции и указанных кодирующих устройств для синхронного сбора данных измерений и отправки собранных данных измерений в модуль главного компьютера;
указанный модуль главного компьютера посредством UART-интерфейса отправляет в модуль FPGA команду управления для сбора данных и посредством интерфейса преобразования сигнала с USB-порта на последовательный порт принимает данные измерений.
При необходимости указанные направляющие стержни на двух концах снабжены устройствами механической тяги;
указанные устройства механической тяги содержат приводные двигатели и электролебедки; указанные приводные двигатели приводят в движение тяговые тросы на электролебедках с обеспечением движения указанного робота для измерения кривой вперед и назад.
При необходимости количество указанных ходовых колес составляет три, при этом три указанных ходовых колеса установлены равномерно и симметрично.
При необходимости количество колес для измерения пройденного пути составляет три, при этом три указанных колеса для измерения пройденного пути установлены равномерно и симметрично.
При необходимости указанный блок питания связан с модулем измерения инерции, модулем FPGA, модулем кварцевого генератора и модулем главного компьютера.
Во втором варианте осуществления согласно настоящему изобретению предложен способ измерения пространственной кривой трубопровода посредством робота для измерения кривой, который включает этапы, на которых:
управляют указанным роботом для измерения кривой для сохранения геометрического центра модуля измерения инерции соответствующим линии центральной оси указанной камеры для электронных компонентов и для обеспечения движения вперед и назад в трубопроводе, при этом посредством модуля измерения инерции и кодирующих устройств собирают данные измерений;
данные измерений, собранные модулем измерения инерции и кодирующими устройствами, сравнивают с данными пространственной кривой трубопровода в исходный момент времени с получением степени деформации пространственной кривой трубопровода.
При необходимости указанный этап, на котором указанным роботом для измерения кривой управляют для сохранения геометрического центра модуля измерения инерции соответствующим линии центральной оси указанной камеры для электронных компонентов и для обеспечения движения вперед и назад в трубопроводе, дополнительно включает:
синхронное втягивание всех указанных ходовых колес посредством пружин, установленных на направляющих стержнях, и независимое втягивание всех колес из по меньшей мере одной группы колес для измерения пройденного пути на выполненных с возможностью независимого втягивания опорах колес с обеспечением сохранения геометрического центра модуля измерения инерции расположенным на линии центральной оси указанной камеры для электронных компонентов;
управление роботом для измерения кривой посредством устройств механической тяги, установленных на двух концах указанных направляющих стержней, с обеспечением движения вперед и назад в трубопроводе.
При необходимости указанная плата сбора данных также снабжена модулем FPGA, модулем кварцевого генератора и модулем главного компьютера;
указанный способ дополнительно включает:
осуществление указанным модулем FPGA на основании тактового сигнала от модуля кварцевого генератора запуска и управления в отношении модуля измерения инерции и указанных кодирующих устройств с синхронным сбором данных измерений и отправкой собранных данных измерений в модуль главного компьютера;
сравнение указанным модулем главного компьютера принятых данных измерений с данными пространственной кривой трубопровода в исходный момент времени с получением степени деформации пространственной кривой трубопровода.
Положительные эффекты: согласно настоящему изобретению предложен робот и способ измерения пространственной кривой трубопровода, в которых за счет синхронного прижимания ходовых колес обеспечивается постоянное нахождение точки измерения устройства измерения трубопровода на линии центральной оси трубопровода; за счет независимого прижимания колес для измерения пройденного пути обеспечивается высокоточное измерение пройденного пути; и посредством платы сбора данных для высокоточного сбора данных обеспечивается синхронный сбор данных многоканальным устройством измерения пройденного пути и высокоточным устройством измерения инерции. Посредством измерительного устройства, предложенного согласно настоящему изобретению, может обеспечиваться точность измерения деформации пространственной кривой трубопровода на уровне миллиметров, что может удовлетворять требованиям относительно отслеживания деформации.
Описание прилагаемых графических материалов
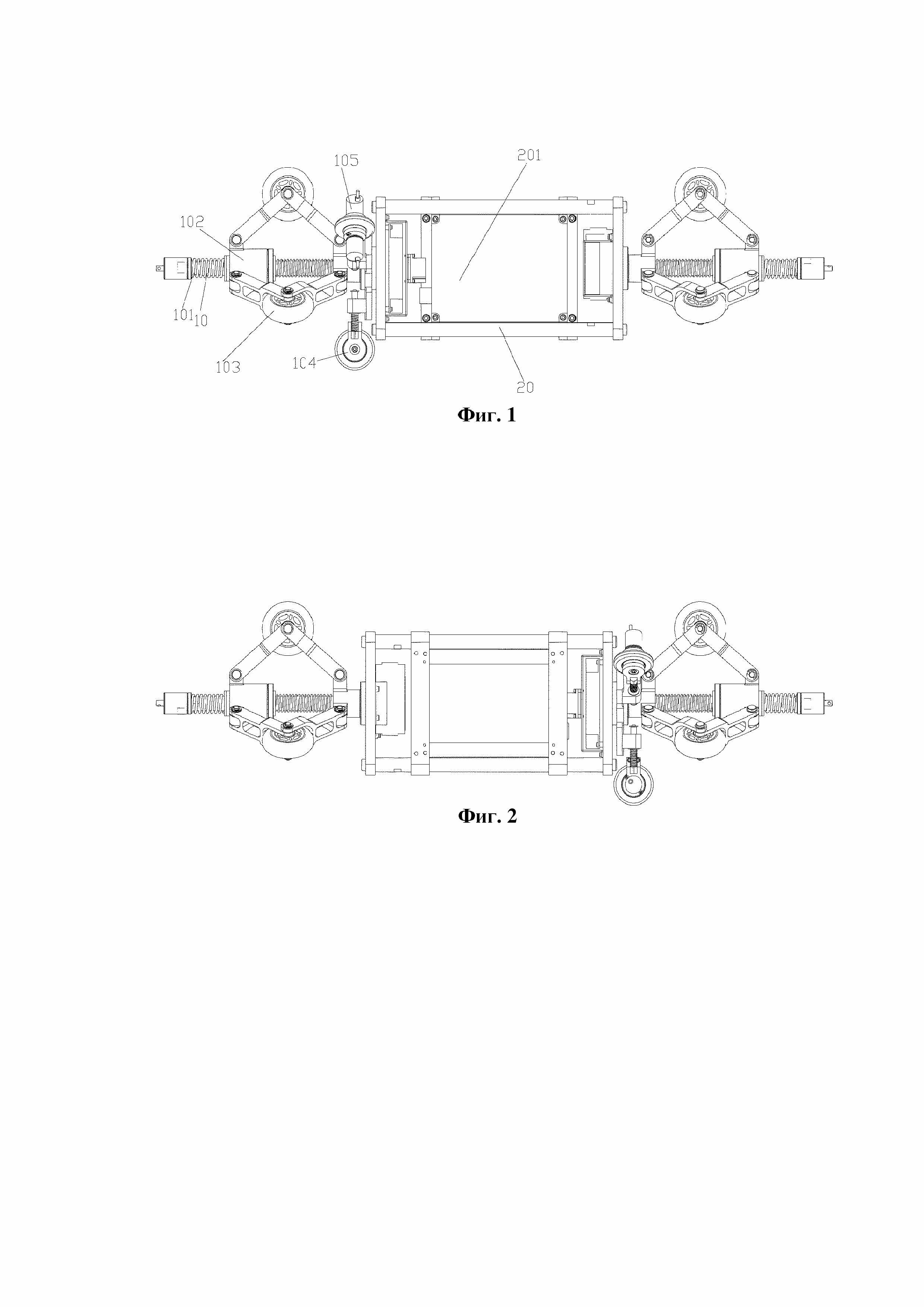
На фиг. 1 представлено изображение спереди робота для измерения кривой, предложенного согласно настоящему изобретению;
на фиг. 2 представлено изображение сзади робота для измерения кривой, предложенного согласно настоящему изобретению;
на фиг. 3 представлено изображение слева робота для измерения кривой, предложенного согласно настоящему изобретению;
на фиг. 4 представлено изображение справа робота для измерения кривой, предложенного согласно настоящему изобретению;
на фиг. 5 представлена логика осуществления высокоточной синхронизации множества датчиков указанного робота для измерения трубопровода, предложенного согласно настоящему изобретению;
на фиг. 6 представлено схематическое изображение конструкции устройства механической тяги указанного робота для измерения кривой согласно настоящему изобретению;
на фиг. 7 представлен способ измерения пространственной кривой трубопровода посредством указанного робота для измерения кривой, предложенного согласно настоящему изобретению.
Конкретные варианты осуществления
Чтобы цели, технические решения и преимущества настоящего изобретения были еще более ясными и понятными, настоящее изобретение описано ниже более подробно на основании прилагаемых графических материалов и вариантов осуществления. Следует понимать, что рассмотренные здесь конкретные варианты осуществления служат лишь для объяснения настоящего изобретения и вовсе не предназначены для ограничения настоящего изобретения.
С учетом проблемы существующих устройств измерения трубопровода, связанной с относительно низкой точностью, согласно настоящему изобретению предложены робот и способ высокоточного измерения пространственной кривой трубопровода при отслеживании на предмет деформации. В частности, согласно настоящему изобретению трубопровод служит устройством отслеживания деформации, которое в период возведения строительных конструкций закладывается в место, в котором необходимо отслеживать деформацию; посредством робота для измерения трубопровода измеряется пространственная кривая трубопровода, которая сопоставляется с кривыми за разные периоды времени, с осуществлением мониторинга степени деформации конструкции.
В первом варианте осуществления согласно настоящему изобретению предложен робот для измерения пространственной кривой трубопровода, как, например, показанный на фиг. 1, который содержит:
камеру 20 для электронных компонентов; направляющие стержни 10, центрально прикрепленные к указанной камере 20 для электронных компонентов с двух сторон; держатели колес, которые соединены с указанными направляющими стержнями 10 посредством линейных подшипников 102; по меньшей мере две группы ходовых колес 103, равномерно распределенных и установленных на указанных держателях колес; по меньшей мере одну группу колес 104 для измерения пройденного пути, расположенных на направляющем стержне 10 с одной стороны и установленных на опорах колес, выполненных с возможностью независимого втягивания; и кодирующие устройства 105, установленные на всех указанных колесах 104 для измерения пройденного пути; при этом на направляющих стержнях 10 с двух сторон относительно указанных линейных подшипников 102 установлены пружины 101;
в указанной камере 20 для электронных компонентов установлены: модуль 201 измерения инерции, блок управления сбором данных и блок питания;
все группы указанных ходовых колес 103 посредством указанных пружин выполнены с возможностью синхронного втягивания для обеспечения соответствия геометрического центра указанного модуля 201 измерения инерции линии центральной оси указанной камеры 20 для электронных компонентов;
указанный блок управления сбором данных управляет модулем 201 измерения инерции и кодирующими устройствами 105 для сбора данных измерений и сравнивает указанные данные измерений с данными пространственной кривой трубопровода в исходный момент времени для получения степени деформации пространственной кривой трубопровода.
Предложенный согласно настоящему изобретению робот для измерения кривой снабжен камерой для электронных компонентов, ходовыми колесами и колесами для измерения пройденного пути на направляющих стержнях, установленных с двух сторон камеры для электронных компонентов; камера для электронных компонентов расположена в центре всего робота для измерения кривой, и центр модуля измерения инерции, установленного на плате сбора данных, расположен на линии центральной оси камеры для электронных компонентов и при этом также расположен на линии центральной оси трубопровода.
С двух сторон относительно камеры для электронных компонентов установлены синхронно прижимаемые ходовые колеса, при этом на каждой стороне установлена по меньшей мере одна группа ходовых колес и каждая группа ходовых колес содержит предпочтительно три равномерно распределенных ходовых колеса; указанные ходовые колеса 103 установлены на держателях колес; для ходовых колес 103 выбран износостойкий полимерный материал подходящей жесткости; указанные держатели колес соединены с направляющими стержнями посредством линейных подшипников 102; на направляющих стержнях 10 с двух сторон относительно линейных подшипников 102 установлены пружины, которые могут обеспечивать возможность синхронного втягивания трех ходовых колес, в результате чего обеспечивается прижимание держателей колес в трубопроводе, чтобы линия центральной оси держателей соответствовала линии центральной оси трубопровода. Степень натянутости пружин на направляющих стержнях 10 можно регулировать, чтобы обеспечивалась возможность точного прилегания ходовых колес к стенке трубопровода.
На каждом колесе 104 для измерения пройденного пути установлено по одному кодирующему устройству 105; указанные кодирующие устройства 105 путем оптоэлектронного преобразования преобразовывают величину механического геометрического смещения на выходном валу колес для измерения пройденного пути в импульс или цифровую величину и передают указанные импульс или цифровую величину в связанный с ними блок управления сбором данных. На направляющих стержнях 10 с двух сторон относительно указанных линейных подшипников 102 установлены пружины 101.
Как показано на изображении сзади робота для измерения кривой, представленном на фиг. 2, а также на изображениях слева и справа, представленных на фиг. 3 и фиг. 4, при осуществлении на практике выбирают одну группу ходовых колес (каждая группа содержит три ходовых колеса) и одну группу колес для измерения пройденного пути, при этом три ходовых колеса из каждой группы таких колес равномерно распределены, равно как и равномерно распределены три колеса для измерения пройденного пути из каждой группы колес для измерения пройденного пути, и три ходовых колеса посредством их держателей колес и пружины, расположенной между двумя концами держателей колес, синхронно прижимаются, и тем самым обеспечивается соответствие геометрического центра робота для контрольного измерения кривой центру трубопровода. Указанные колеса для измерения пройденного пути выполнены с возможностью независимого прижимания, и тем самым обеспечивается их плотное прилегание к внутренней стенке трубопровода во время измерения, а также обеспечивается точность данных измерений.
Предпочтительно указанная плата сбора данных также снабжена модулем FPGA и модулем кварцевого генератора.
Как показано на фиг. 5, установленный на плате сбора данных указанный модуль измерения инерции связан с указанным модулем FPGA посредством интерфейса преобразования сигнала RS-422 в сигнал LVTTL; указанный модуль FPGA посредством соответственно UART-интерфейса и интерфейса преобразования сигнала с USB-порта на последовательный порт устанавливает коммуникационное соединение с главным компьютером.
Указанный модуль FPGA на основании тактового сигнала от указанного модуля кварцевого генератора осуществляет запуск и управление в отношении указанного модуля измерения инерции и указанных кодирующих устройств для синхронного сбора данных измерений и отправки собранных данных измерений в модуль главного компьютера.
Указанный модуль главного компьютера посредством UART-интерфейса отправляет в модуль FPGA команду управления для сбора данных и посредством интерфейса преобразования сигнала с USB-порта на последовательный порт принимает данные измерений.
На указанной плате сбора данных также установлен блок питания, предназначенный для подачи электропитания; указанный блок питания связан с модулем измерения инерции, модулем FPGA, модулем кварцевого генератора и модулем главного компьютера.
Измерительная система со множеством встроенных датчиков, установленных на плате сбора данных, является ядром робота для измерения кривой. В камере для электронных компонентов измерительная система со множеством встроенных датчиков состоит из элемента управления ядром блока FPGA, модуля кварцевого генератора, содержащего высокоточный источник отсчета времени, модуля измерения инерции, модуля главного компьютера, блока питания и других блоков. Согласно настоящему изобретению посредством блока FPGA обеспечивается сбор данных модулем измерения инерции и тремя высокоточными кодирующими устройствами. В частности, источником отсчета времени в системе служит высокоуправляемый напряжением и термокомпенсированный элемент на основе кварцевых кристаллов, частотно-температурная стабильность которого составляет 1 ppm; посредством модуля FPGA и с применением времени как источника сигнала запуска обеспечивается синхронизация данных для управления модулем измерения инерции (IMU) и фотоэлектрическими кодирующими устройствами с осуществлением синхронного сбора и передачи данных измерений.
Модуль главного компьютера посредством UART-интерфейса сначала отправляет в модуль FPGA команду управления для сбора данных; после приема команды запуска модуль FPGA посредством интерфейса преобразования сигнала с USB-порта на последовательный порт передает в режиме реального времени данные измерений трубопровода на основании установленного протокола в модуль главного компьютера для анализа и хранения. Блок управления сбором данных осуществляет управление синхронным сбором и передачей данных от множества датчиков, при этом помехоустойчивость довольно высокая. За счет такой особенности, как параллельное управление посредством модуля FPGA, осуществляется синхронизация времени между множеством датчиков на уровне микросекунд, что является основой для осуществления совместной высокоточной обработки данных на уровне аппаратного обеспечения.
Для обеспечения движения робота для измерения кривой в трубопроводе, как показано, например, на фиг. 6, указанные направляющие стержни на двух концах предпочтительно снабжены устройствами механической тяги; указанные устройства механической тяги содержат приводные двигатели и электролебедки; указанные приводные двигатели приводят в движение тяговые тросы на электролебедках с обеспечением движения указанного робота для измерения кривой вперед и назад.
В частности, в качестве тягового элемента робота для измерения кривой применяются лебедки, содержащие небольшие автоматизированные электродвигатели и крепкие тяговые тросы из тонких волокон. В процессе эксплуатации движением робота для измерения кривой управляют путем управления работой приводных двигателей. Посредством электролебедок, установленных на двух концах трубопровода, может обеспечиваться возвратно-поступательное движение робота для измерения кривой в трубопроводе для выполнения многократного измерения. Для изменения устройств тяги применяются программно-управляемые сервомоторы, чтобы осуществлялось измерение автоматического перемещения робота для измерения кривой.
Работа робота для измерения кривой разделена на три этапа, включающих подготовительный этап, этап измерения и заключительный этап. На подготовительном этапе в области двух концов подлежащего измерению трубопровода устанавливают электролебедки; посредством устройства для пропускания троса крепкие тяговые тросы из тонких волокон электролебедок пропускают через трубопровод; тяговые тросы закрепляют в многоосевых буксировочных серьгах на двух концах робота для измерения трубопровода. На этапе измерения переключают выключатель питания робота для измерения кривой трубопровода и оставляют в отверстии трубопровода в неподвижном состоянии на 5–10 мин для приведения в исходное состояние. После приведения в исходное состояние обеспечивают работу лебедок по одной; вращение лебедок по одной обеспечивает то, что робот для измерения кривой может осуществлять в трубопроводе возвратно-поступательное движение много раз, чтобы осуществлялось многократное измерение одного отрезка трубопровода, проверяемого на предмет деформации. После завершения измерения обеспечивают нахождение робота для измерения кривой трубопровода в неподвижном состоянии 5–10 мин в одном трубопроводе. На заключительном этапе робота для измерения трубопровода извлекают и отцепляют тяговые тросы электролебедки.
Во втором варианте осуществления согласно настоящему изобретению предложен способ измерения пространственной кривой трубопровода посредством робота для измерения кривой, как, например, показанный на фиг. 7, который включает этапы, на которых:
этап S71: управляют указанным роботом для измерения кривой для сохранения геометрического центра модуля измерения инерции расположенным на линии центральной оси указанной камеры для электронных компонентов и для обеспечения движения вперед и назад в трубопроводе, при этом управляют модулем измерения инерции и модулями кодирующих устройств со сбором данных измерений.
В частности, на этом этапе движением вперед и назад робота для измерения кривой управляют посредством устройств механической тяги, установленных на двух концах направляющих стержней; указанные устройства механической тяги содержат приводные двигатели и электролебедки; указанные приводные двигатели приводят в движение тяговые тросы на электролебедках с обеспечением движения указанного робота для измерения кривой вперед и назад. Чтобы обеспечивалась точность данных измерений, также необходимо обеспечить, чтобы геометрический центр модуля измерения инерции был расположен на линии центральной оси указанной камеры для электронных компонентов.
Этап S72: данные измерений, собранные модулем измерения инерции и кодирующими устройствами, сравнивают с данными пространственной кривой трубопровода в исходный момент времени с получением степени деформации пространственной кривой трубопровода.
В частности, указанный этап, на котором указанным роботом для измерения кривой управляют для сохранения геометрического центра модуля измерения инерции расположенным на линии центральной оси указанной камеры для электронных компонентов и для обеспечения движения вперед и назад в трубопроводе, дополнительно включает:
синхронное втягивание всех указанных ходовых колес посредством пружин, установленных на направляющих стержнях, и независимое втягивание всех из по меньшей мере двух колес для измерения пройденного пути на выполненных с возможностью независимого втягивания опорах колес с обеспечением сохранения геометрического центра модуля измерения инерции расположенным на линии центральной оси указанной камеры для электронных компонентов;
управление роботом для измерения кривой посредством устройств механической тяги, установленных на двух концах указанных направляющих стержней, с обеспечением движения вперед и назад в трубопроводе.
В частности, для обеспечения беспрепятственного сбора данных измерений и передачи данных указанная плата сбора данных также снабжена модулем FPGA и модулем кварцевого генератора.
Указанный способ дополнительно включает:
осуществление указанным модулем FPGA на основании тактового сигнала от модуля кварцевого генератора запуска и управления в отношении модуля измерения инерции и указанных кодирующих устройств с синхронным сбором данных измерений и отправкой собранных данных измерений в главный компьютер;
сравнение указанным главным компьютером принятых данных измерений с данными пространственной кривой трубопровода в исходный момент времени с получением степени деформации пространственной кривой трубопровода.
Положительные эффекты: согласно настоящему изобретению предложены робот и способ измерения пространственной кривой трубопровода, при этом указанный робот для измерения пространственной кривой содержит: камеру для электронных компонентов; направляющие стержни, которые центрально прикреплены к указанной камере для электронных компонентов с двух сторон; держатели колес, которые соединены с указанными направляющими стержнями посредством линейных подшипников; по меньшей мере две группы ходовых колес, равномерно распределенных и установленных на указанных держателях колес; по меньшей мере одну группу колес для измерения пройденного пути, расположенных на направляющем стержне с одной стороны и установленных на опорах колес, выполненных с возможностью независимого втягивания; и кодирующие устройства, установленные на всех указанных колесах для измерения пройденного пути; внутри указанной камеры для электронных компонентов установлен модуль измерения инерции, установленный на плате сбора данных; при выполнении измерений с применением указанного робота для измерения кривой указанным роботом для измерения кривой управляют для сохранения геометрического центра модуля измерения инерции расположенным на линии центральной оси указанной камеры для электронных компонентов и для обеспечения движения вперед и назад в трубопроводе, при этом модуль измерения инерции собирает данные измерений; данные измерений, собранные модулем измерения инерции, сравнивают с данными пространственной кривой трубопровода в исходный момент времени с получением степени деформации пространственной кривой трубопровода. Предложенный согласно настоящему изобретению робот для измерения кривой за счет синхронного прижимания ходовых колес обеспечивает постоянное нахождение точки измерения устройства измерения трубопровода на линии центральной оси трубопровода; за счет независимого прижимания колес для измерения пройденного пути обеспечивает высокоточное измерение пройденного пути; и посредством платы сбора данных для высокоточного сбора данных обеспечивает синхронный сбор данных многоканальным устройством измерения пройденного пути и высокоточным устройством измерения инерции. Посредством измерительного устройства, предложенного согласно настоящему изобретению, может обеспечиваться точность измерения деформации пространственной кривой трубопровода на уровне миллиметров, что может удовлетворять требованиям относительно отслеживания деформации. Разумеется, специалисты в данной области техники на основании технических решений и идей настоящего изобретения могут предложить эквивалентные замены или изменения, и все такие изменения или замены должны входить в объем защиты настоящего изобретения, который определяется прилагаемой формулой изобретения.
Реферат
Изобретение относится к области инженерной геодезии и технологий для измерения трубопроводов. Согласно настоящему изобретению предложены робот и способ измерения пространственной кривой трубопровода, при этом указанный робот для измерения кривой содержит: камеру для электронных компонентов; направляющие стержни; держатели колес; ходовые колеса, установленные на указанных держателях колес; колеса для измерения пройденного пути, расположенные на направляющем стержне с одной стороны; и кодирующие устройства; внутри указанной камеры для электронных компонентов установлены модуль измерения инерции, блок управления сбором данных и блок питания; при выполнении измерений с применением указанного робота для измерения кривой указанным роботом для измерения кривой управляют для обеспечения движения вперед и назад в трубопроводе и для одновременного сбора данных измерений; данные измерений сравнивают с данными пространственной кривой трубопровода в исходный момент времени с получением степени деформации пространственной кривой трубопровода. Предложенный согласно настоящему изобретению робот для измерения кривой за счет синхронного прижимания ходовых колес обеспечивает постоянное нахождение точки измерения робота для измерения кривой трубопровода на линии центральной оси трубопровода и за счет независимого прижимания колес для измерения пройденного пути обеспечивает высокоточное измерение пройденного пути. Техническим результатом изобретения является обеспечение точности измерения деформации пространственной кривой трубопровода на уровне миллиметров. 2 н. и 7 з.п. ф-лы, 7 ил.
Комментарии