Способ и устройство контроля состояния конструкции самолета - RU2385456C2
Код документа: RU2385456C2
Чертежи




Описание
Настоящее изобретение относится к способу и устройству контроля состояния конструкции самолета. Задачей изобретения является улучшение учета напряжений и столкновений, которым подвергается самолет во время его эксплуатации, во время его срока службы.
Предшествующий уровень техники
Контроль самолета включает регулярный визуальный осмотр самолета, в частности, в каждом пункте посадки. Кроме того, во время технических осмотров некоторые детали самолета демонтируют и, в частности, из соображений безопасности некоторые детали заменяют. Снятые детали подвергают анализу в лабораторных условиях. Лабораторные анализы включают в себя недеструктивный контроль и деструктивный контроль. Недеструктивный контроль содержит замеры прочности снятых деталей под действием различных напряжений. В случае необходимости, для измерения прочности деталей на месте предусматривают специальные инструменты. Во время деструктивного контроля измеряют предел прочности деталей. В результате, делают вывод о степени их старения и сравнивают фактическое старение с прогнозируемым.
Такой контроль не является идеальным. Действительно, он не позволяет учитывать в реальном времени все события, происходящие с самолетом. Он отображает лишь частичное состояние в данный момент. Как правило, нет никакой возможности ни обнаружить, ни сигнализировать, ни учитывать последствия падения какого-либо предмета, инструмента, ударов града по критическим частям самолета, таким как купол радиолокационной антенны, передние кромки крыла и хвостового оперения. Кроме того, операции технического осмотра, требующие осуществления демонтажа и, следовательно, длительной стоянки самолета, являются сложными. Они усложняются еще больше, если осмотр приводит к необходимости более глубокого исследования.
Краткое изложение существа изобретения
Технической задачей настоящего изобретения является решение этой проблемы, точнее, улучшение учета напряжений и столкновений, которым подвергается самолет во время его эксплуатации.
Согласно изобретению поставленная задача решается путем оборудования самолета системой постоянного контроля, осуществляемого на протяжении всего полезного срока службы самолета. Как правило, этот полезный срок службы включает в себя фазы полета и фазы стоянок в аэропорту или в техническом ангаре. Система контроля является электронной системой с питанием от бортовой сети. Постоянное электрическое питание, поддерживаемое во время фаз стоянок, позволяет произвести исследования по всем событиям, произошедшим с самолетом. В этом случае измерения прочности, осуществляемые в лаборатории, заменяют или, по меньшей мере, дополняют акустическими измерениями. Действительно, согласно изобретению отмечается, что при ударах или столкновениях, а также больших усилиях, которым подвергается конструкция самолета, в местах ударов или столкновений или в зоне напряжения происходит излучение звуковой волны. Поэтому в чувствительных местах упомянутых критических частей (узлов) можно установить наборы пьезоэлектрических датчиков. Эти датчики соединены с электронной системой и выдают на нее сигнал сразу при возникновении какого-либо события.
Таким образом, согласно изобретению отмечается, что сильные напряжения вызывают излучение акустической волны, отличающейся от волны в результате столкновения, а отслеживание этих событий позволяет следить за состоянием самолета. Проще говоря, самолет, который следует по маршруту, проходящему через зону частых гроз, больше подвержен таким событиям. Он стареет больше, даже если его внешний вид является вполне приемлемым. Согласно изобретению измеряют степень этих резких воздействий напряжений.
В связи с этим объектом настоящего изобретения является способ контроля состояния конструкции самолета, который заключается в том, что
измеряют последствия столкновений, напряжений или старения конструкции самолета,
способ характеризуется тем, что для осуществления этих измерений на части конструкции, предназначенные для контроля, устанавливают пьезоэлектрические датчики,
постоянно считывают и обрабатывают сигналы, поступающие от датчиков в центральный блок обработки, во время полезного срока службы самолета на земле и в воздухе,
указанные сигналы являются результатом присутствия акустической волны в конструкции самолета в месте установки датчиков.
Объектом настоящего изобретения являются также устройство контроля состояния конструкции самолета, содержащее установленное на борту самолета устройство обнаружения путем акустического измерения проявления столкновений, напряжений или старения на этой конструкции, и бортовое устройство, обеспечивающее безопасность работы установленного на борту самолета устройства.
Краткое описание чертежей
Настоящее изобретение будет более очевидно из нижеследующего описания со ссылками на прилагаемые чертежи, которые представлены исключительно в качестве иллюстративных и неограничительных примеров и на которых:
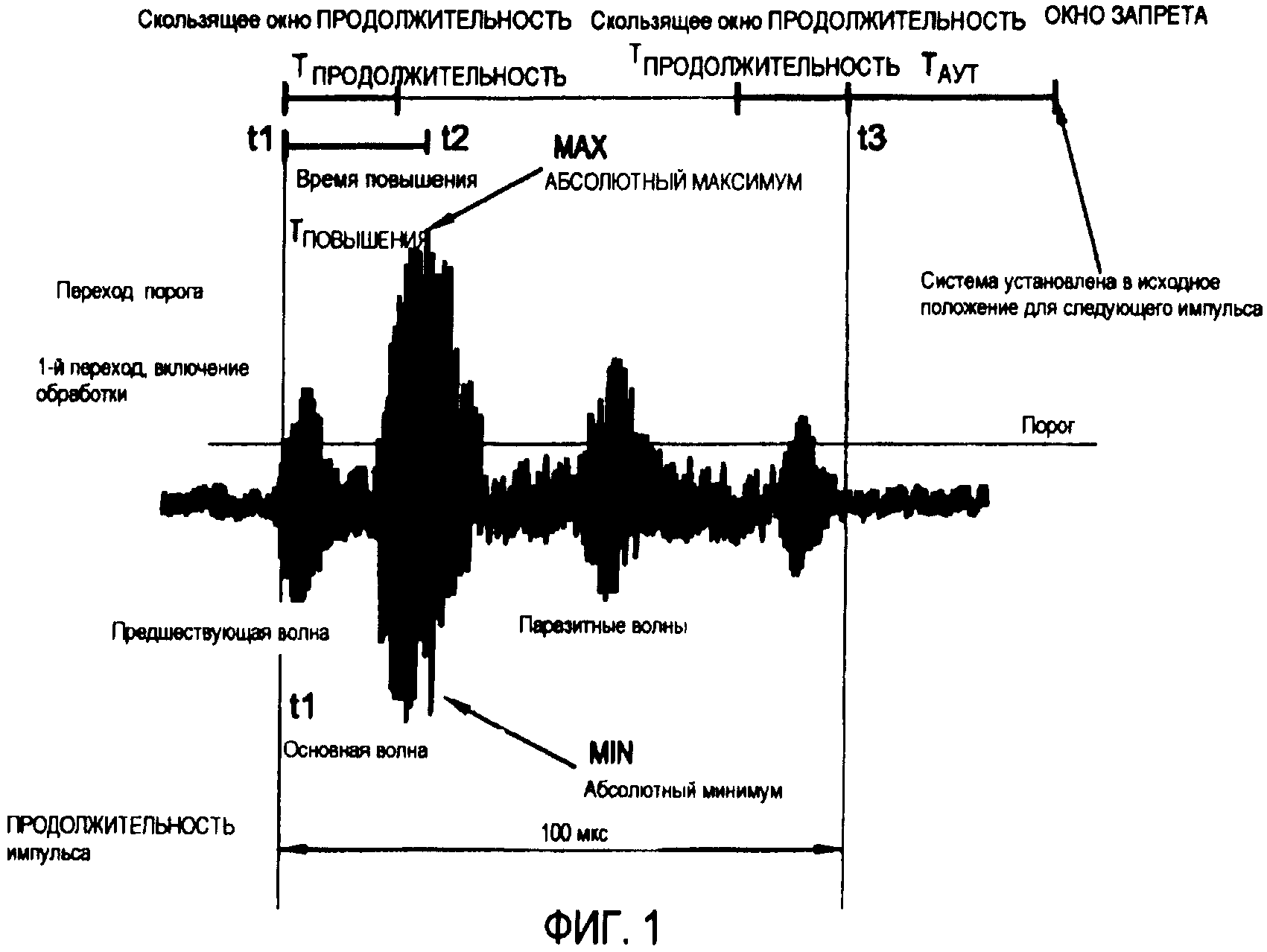
Фиг.1 изображает временную диаграмму амплитуды акустического сигнала, измеренного согласно способу и заявленным устройством, согласно изобретению;
Фиг.2 - диаграмму временного смещения измеренных акустических сигналов, позволяющего локализовать место столкновения, в случае наличия нескольких пьезоэлектрических датчиков в одной контролируемой зоне, согласно изобретению;
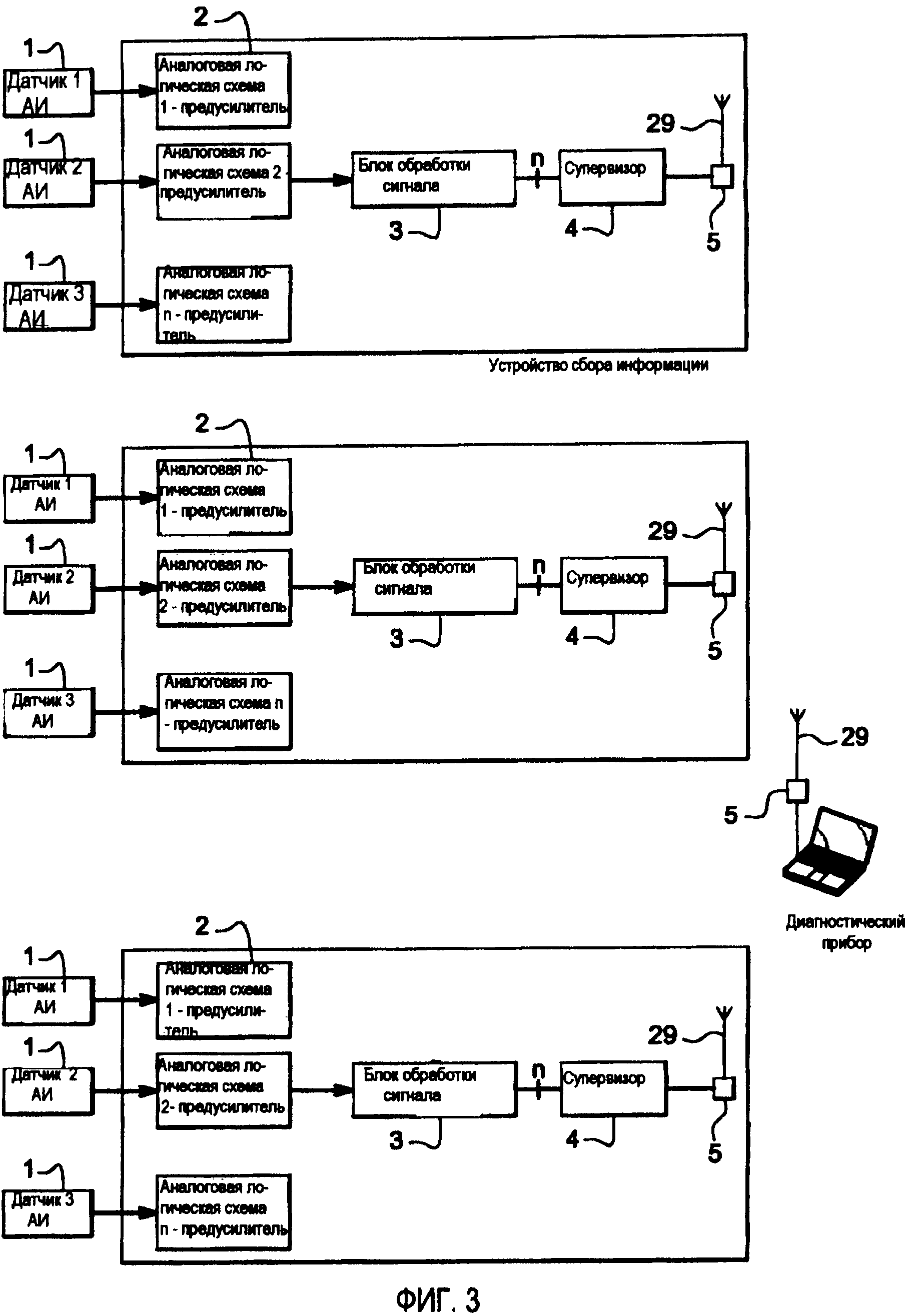
Фиг.3 - схему распределения различных датчиков в самолете и устройства сбора сигналов, поступающих с датчиков, согласно изобретению;
Фиг.4 - детальную функциональную схему регистрирующего устройства согласно изобретению;
Фиг.5 и 6 - схему устройства предварительного усиления, приведения к стандартному формату и проверки целостности цепи сбора данных согласно изобретению;
Фиг.7 и 8 - схему устройства предварительного усиления сигналов, поступающих от пьезоэлектрических датчиков (трансимпедансная монтажная схема), и схему механизма обнаружения неисправности пьезоэлектрического датчика согласно изобретению.
Описание предпочтительных вариантов воплощения изобретения
В изобретении используются принципы акустического излучения. Согласно изобретению контролируют не столько состояние частей самолета спустя много времени после наступления событий, сколько переходные явления, происходящие в момент самого события (в несколько миллисекунд или секунд после начала этих явлений). При этом изобретение не мешает в дальнейшем производить вышеуказанные операции технического осмотра, в частности, чтобы лучше соотнести выводы о старении с акустическими измерениями во время всего срока службы самолета.
Акустический тест является эффективным методом исследования поведения материалов, деформирующихся под действием механического напряжения. Акустическое излучение можно определить как упругую переходную волну, возникающую при быстром высвобождении энергии в материале. В данном случае акустический тест используется в качестве технологии недеструктивного контроля, позволяющего обнаружить повреждения.
Электронные устройства, использующие акустические принципы для испытания материалов, являются специальными метрологическими изделиями и, следовательно, инструментальными изделиями. Они разработаны для следующих частных вариантов применения:
- для наблюдения за поведением материалов: в частности, исследование распространения трещин, усталости, коррозии, текучести и расслоения,
- для недеструктивного контроля во время процесса изготовления: в частности, обработка материалов, металлургические превращения в металле и в сплаве, обнаружение дефектов, таких как включения, закалочные трещины, поры, изготовление, процессы деформации: прокатка, ковка, волочение, сварка и пайка (включения, трещины, раковины),
- для контроля конструкций, в частности непрерывного контроля металлических конструкций, периодического тестирования камер давления, трубопроводов, каналов, мостов, кабелей,
- и для обнаружения утечек.
Такие акустические метрологические устройства применяются в нефтехимии и химии для резервуаров-танков, реакторных камер, буровых установок, шельфовых платформ, трубопроводов, вентилей. Они применяются также в областях энергетики для камер ядерных реакторов, парогенераторов, керамических солнечных коллекторов, трансформаторов.
Они известны также в области авиационной и космической промышленности и применяются в лабораториях для измерения усталости, коррозии и для исследования композитных и металлических конструкций.
Но даже в этой области, равно как и в любой другой, до сих пор они не использовались на борту самолета или космического аппарата. Они использовались только в лабораториях и применялись на демонтированных деталях, находящихся в статическом положении без движения. Поэтому и возникала уже указанная выше проблема.
Согласно изобретению используют схему акустического излучения, которая измеряет сигнал, обрабатывает данные во времени и сохраняет эти данные в памяти. В изобретении показано, что можно пренебречь вибрациями самолета во время полета и выделять только полезные акустические сигналы. Обычно при применении способа в соответствии с настоящим изобретением измеряют мощные импульсы механических волн, спектральные составляющие которых на практике находятся в пределах от 20 кГц до 2 МГц. Акустическая схема позволяет анализировать в режиме реального времени данные: характеристики импульсов (высокочастотных сигналов) во временной области. Можно также предусмотреть анализ их частотных характеристик. Она позволяет также локализовать акустические источники по зоне или ячейке, распознавать и классифицировать акустические источники в реальном времени и автоматически фильтровать и сохранять в памяти акустические импульсы в зависимости от их характеристик и выделять из них данные, характерные для определенного явления.
Система в соответствии с настоящим изобретением позволяет также управлять ее собственными параметрами конфигурации, передачей данных и сохранением данных в памяти.
Таким образом, настоящее изобретение может также применяться в области бортовых систем, встроенных систем, электрических, электронных и программируемых электронных систем, оборудования, связанного с безопасностью на транспорте. Устройство в соответствии с настоящим изобретением обладает специфическими функциональными возможностями для обнаружения столкновений, поскольку выполнено с возможностью работы во время этих столкновений.
Для этого оно содержит материальные и программные функциональные средства для обеспечения надежной работы. Эти функциональные средства обеспечения надежности работы состоят из механизмов обнаружения экзогенных и эндогенных неисправностей устройства. Экзогенными функциональными возможностями являются, например, контроль и обнаружение состояния датчика или линий (отключение, короткое замыкание, утечка на линии датчика и даже отказ датчика) или, в частности, непрерывное детектирование сигналов, выдаваемых датчиками, контроль состояния внешнего бортового электрического питания и повышение автономности устройства за счет добавления аварийной батареи. Эндогенные функциональные возможности должны позволять контролировать и обнаруживать внутренние неисправности устройства. Этими автоматическими тестами главным образом являются контроль буферных запоминающих устройств и ЗУ хранения данных, контроль бортового программного обеспечения, например, с использованием схемы автоматического отключения для избежания блокировки задач процессора. Эта система обеспечения безопасности работы в целом охватывает потенциальные риски, связанные со сбоем функций, которые должны выполняться устройством или системой. В зависимости от критического характера обнаруженной неисправности устройство переходит на режим сниженной эффективности работы.
Таким образом, настоящее изобретение касается способа и устройства обнаружения, обработки и записи столкновений или напряжений. Это устройство содержит датчики. Датчики являются пьезоэлектрическими и воспринимают механические волны, распространяющиеся в металлической конструкции.
В настоящем описании будут использоваться следующие аббревиатуры, значения которых указаны на фиг.1, 2 и 3:
АЦП - аналого-цифровой преобразователь,
АИ - акустическое излучение,
НДК - недеструктивный контроль,
ПВМ - программируемая вентильная матрица,
ЦПС - цифровой процессор сигнала,
ЧРВ - часы реального времени,
время прохождения для указания разности между временем прихода акустического сигнала на рассматриваемый канал (на пьезоэлектрический датчик этого канала) и временем прихода акустического сигнала на другой канал, достигаемый в первую очередь,
время прихода для указания времени, соответствующего последнему переходу сигнала через порог,
число чередований ЧЧ: число переходов сигналом порога, начиная от первого перехода сигналом порога.
Таким образом, как показано на фиг.1, измеренный акустический сигнал (после электрического преобразования, что будет пояснено ниже) имеет форму колебания. Его амплитуда переходит порог ПОРОГ в момент t1. Он достигает своего максимума в момент t2. Разность t2-t1 является временем повышения этого сигнала. Этот сигнал характеризуется продолжительностью импульса, например, примерно 100 мкс. Продолжительность импульса измеряется между временем t1 и временем t3. Кроме того, время t3 соответствует фиксированной (короткой) продолжительности после последнего перехода порога ПОРОГ. В течение этой продолжительности огибающая сигнала кульминирует, в данном случае четыре раза: один раз при предшествующей волне, один раз при основной волне и два раза при паразитных волнах. Этот отсчет приводит к числу чередований, равному 4. Поскольку сигнал является высокочастотным во время продолжительности импульса, то при помощи фильтра низких частот, граничная частота которого составляет порядка одной пятидесятой средней продолжительности импульса, можно выделить огибающие чередований. Кроме того, сигнал имеет абсолютную положительную амплитуду и абсолютную отрицательную амплитуду. На фиг.2 показано время прохождения, то есть разность времени между моментами начала волны, между первой волной, пришедшей на первый датчик, и этой же волной, пришедшей на другой датчик.
На фиг.3-5 показана система, содержащая материальные и программные компоненты. В частном примере материальные и программные средства образуют функциональное оборудование.
В этом устройстве акустические сигналы, обнаруженные пьезоэлектрическими датчиками 1, преобразуются в аналоговые электрические сигналы. Эти аналоговые сигналы могут быть усилены до требуемых уровней напряжения вынесенными предусилителями 2 (Предусилитель/Аналоговая логическая схема). В этом случае предусилители вынесены ближе к датчикам 1. Предпочтительно эти сигналы усиливаются предусилителями, встроенными в оборудование. Датчики 1 распределены в каждой из чувствительных зон самолета, в частности в указанных выше зонах: купол радиолокационной антенны, передние кромки крыльев и хвостового оперения. На фиг.3 показан контроль трех зон.
Например, 24 датчика распределены в каждой из четырех чувствительных зон. Усиленные сигналы приводятся к стандарту и модулируются для передачи на большие расстояния (10 м ~ 50 м), соответствующие размеру самолета. При приеме они могут быть демодулированы, измерены и обработаны в блоке 3 обработки сигнала. После этого данные из цифровых систем передаются на супервизор 4, который, в свою очередь, передает данные в запоминающие устройства и который управляет стратегией детектирования неисправностей системы. Устройство или диагностический ПК 5 запускает загрузку и запись этих данных и, в случае необходимости, их вывод на дисплей. Блок 3 обработки сигнала содержит аналого-цифровые преобразователи, мультиплексоры, схемы ПВМ или ЦПС.
Каждое событие в конструкции самолета детектируется, автоматически регистрируется по времени и дате и описывается в основном по параметрам амплитуды, чередований, энергии, времени повышения и продолжительности. В случае необходимости может быть измерен частотный спектр. Импульсы и параметры, характеризующие событие, сохраняются в выходных буферных ЗУ цифрового блока 3 обработки сигнала в ожидании передачи на главный процессор.
Супервизор 4 предназначен координировать своевременное считывание данных цифровым блоком 3 обработки сигнала в едином потоке данных, поступающем в буферные ЗУ и массовые ЗУ сверхбольшой емкости, позволяющие системе собирать большие количества данных.
Диагностический прибор 5 является устройством типа персонального компьютера или микрокомпьютера. Он загружает на расстоянии и передает данные из устройства в массовое ЗУ сверхбольшой емкости, как правило, жесткий диск. Он может генерировать вывод данных на монитор визуального наблюдения. Он осуществляет операции ввода/вывода, в частности конфигурацию и калибровку параметров оборудования, например пороговое значение порога ПОРОГ, время релаксации (тайм-аут) после события. Можно определить порог, за пределами которого принимается решение об измерении сигнала, при этом данный порог может быть разным в зависимости от того, находится ли самолет в полете или на стоянке. В зависимости от этого определяют верхний порог сигнала и для сигналов, превышающих этот порог, включают сигнал тревоги.
Согласно изобретению применяют систему, далее называемую оборудованием, имеющую также защитные функции. Защитные функции необходимы для обеспечения достижения состояния безопасности оборудования или для поддержания такого состояния. Такие защитные функции предусмотрены для достижения достаточного уровня целостности при помощи электрических, или электронных, или программируемых электронных систем, или программных средств, или при помощи внешних средств снижения опасности.
Для этого устройство в соответствии с настоящим изобретением дополнительно содержит следующие режимы контроля и диагностики.
Режим контроля включает в себя следующие функциональные возможности:
функции детектирования и классического вычисления параметров события (номер датчика и канала, время прохождения, продолжительность сигнала, максимум, минимум, энергию, число чередований, время повышения и т.д.);
функции автотестирования или контроля, или защиты для каждого модуля, входящего в состав системы для детектирования экзогенных или эндогенных неисправностей оборудования;
функции записи и регистрации по дате и времени акустических событий, внутренних и внешних неисправностей во время срока службы оборудования и функции передачи данных на системную(ые) цифровую(ые) шину(ы) или новые средства кабельной связи и/или радиосвязи;
- функции связи или передачи данных через системную(ые) цифровую(ые) шину(ы) или новые средства кабельной и/или радиосвязи в вынесенный центральный блок. Вынесенный центральный блок может быть диагностическим микрокомпьютером или любым другим оборудованием на этой же системной шине.
В зависимости от степени неисправности оборудование может также работать в режимах сниженной эффективности.
Режим диагностики состоит в перепрограммировании системы, калибровке параметров и передаче данных (параметры событий и неисправности) для анализа.
Преимуществами изобретения являются, в частности, модульность архитектуры материальной части и программных средств, взаимозаменяемость пьезоэлектрических датчиков 1, возможность изменения управляющих импульсов с добавлением периферийных устройств, возможность уменьшения размера системы, контроль за механической целостностью конструкции во время всех фаз эксплуатации упомянутой конструкции.
Функциональная возможность контроля за работой включает в себя функцию подтверждения, функцию защиты работы и функцию управления питанием.
Функция подтверждения неотделима от функции детектирования и вычисления параметров акустического события. Она позволяет повысить надежность измерения. Она требует запроса об условиях, в которых производятся измерения. Следует отметить, что эти условия тоже измеряются и добавляются к измерениям, относящимся к детектируемым акустическим событиям.
Функция защиты работы состоит в защите целостности данных от эндогенных нарушений (переполнение внутренних очередей, памяти, поведение процессора и т.д.) или от экзогенных нарушений (электростатические возмущения, отключение питания, микроотсечки, повреждения кабельных соединений, утечки на плюс или на массу, короткие замыкания, размыкание схем, повреждение датчиков). Эта последняя функция реализуется путем измерения емкости, характеризующей пьезоэлектрический датчик 1. Предпринимаемыми для этого тестами являются измерения или булевые результаты. Тесты являются циклическими или асинхронными в зависимости от их характера. Для подтверждения когерентности некоторых измерений, используемых для тестов, эти измерения фильтруют. После возникновения нескольких отклонений получают подтверждение неисправности.
Функция управления питанием состоит в приведении внешнего питания в соответствие с материальными компонентами и в сохранении части этой внешней энергии в аккумулирующем устройстве. Резервный источник энергии можно использовать в случае отключения внешнего питания.
Развернутая архитектура оборудования (фиг.4) в соответствии с настоящим изобретением содержит четыре модуля. Первым модулем является модуль обработки сигнала ОБРАБОТКА СИГНАЛА, второй модуль - модулем процессора ЦПУ, третий модуль - модулем контроля энергии МОНИТОРИНГ и четвертый модуль - модулем питания ПИТАНИЕ.
Модуль обработки сигнала содержит пьезоэлектрические датчики 1, пронумерованные от Датчик 1 до Датчик n, аналоговые схемы, соответствующие n датчикам, аналого-цифровые преобразователи АЦП 11, схему ПВМ 19, которая производит измерения в режиме реального времени и параллельно получение параметров акустических сигналов.
Для каждого датчика устройство в соответствии с настоящим изобретением содержит аналоговую схему приведения к стандартному формату. Схема приведения к стандарту встроена в цифровые устройства вычисления акустических параметров и не связана с вынесенной аналоговой схемой, как в инструментальных устройствах и устройствах записи данных из предшествующего уровня техники.
Аналоговая схема (фиг.5) содержит последовательно соединенные предусилитель 6 заряда с выбираемым коэффициентом 1/Cn для датчика n с фиксированной граничной частотой 1/RnCn=20 кГц, фильтр 7 высокой частоты с фиксированной граничной частотой 20 кГц, полосно-пропускающий фильтр 8 с граничной частотой, программируемой в зависимости от типа пьезоэлектрического датчика. Этот полосно-пропускной фильтр может быть замкнут накоротко при помощи переключателя или транзистора типа полевого транзистора. Она содержит также усилитель 9 с выбираемыми коэффициентами усиления 0 дБ, 20 дБ, 40 дБ, 60 дБ, 80 дБ, чтобы адаптировать оборудование к разным типам пьезоэлектрических датчиков 1, выравнивающий фильтр 10 на 2 МГц. Предусилитель 6 заряда не реагирует на эффекты расстояние/затухание, как предусилитель 9 напряжения. Предусилитель 6 заряда поддерживает чувствительность сигнала независимо от расстояния пьезоэлектрического датчика 1 от предусилителя 9.
Для детектирования утечек массы и утечек напряжения питания усилителя 6 используют компараторы 12. Компараторы детектируют рабочие уровни напряжения, сравнивая их со значениями высокого напряжения и низкого напряжения. Они посылают в систему сигналы о линейных неисправностях. Данная технология обеспечивает непрерывность контроля и хороший уровень надежности.
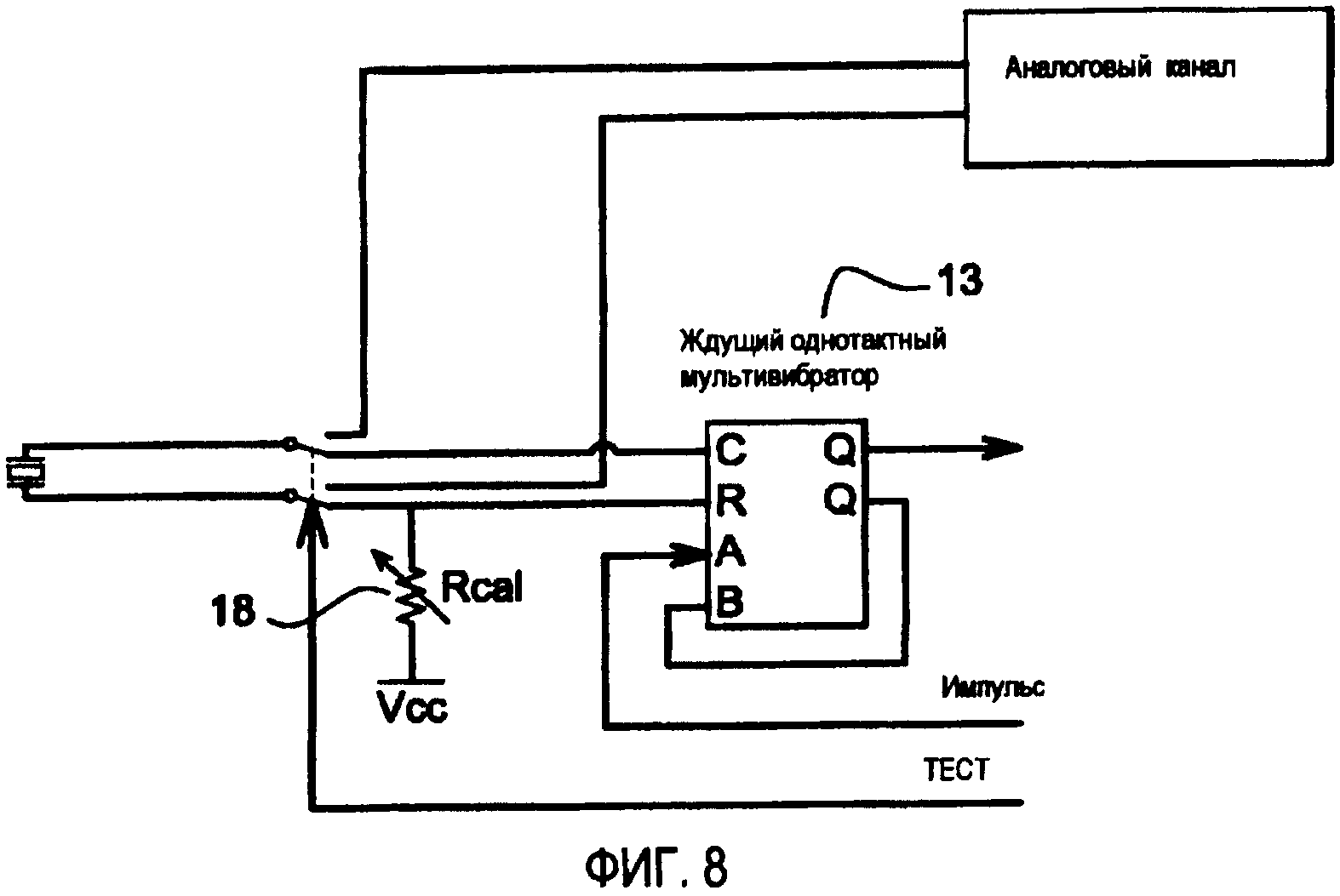
Используют также ждущий однотактный мультивибратор 13, чтобы проверять значение емкости пьезоэлектрического датчика 1. Измерение емкости пьезоэлектрического датчика 1 позволяет обнаружить неисправность на уровне датчика 1, размыкание линии или короткое замыкание. Мультивибратор соединен с датчиком при помощи реле. Сигнал, выдаваемый мультивибратором 13, указывает на состояние датчика.
Предусилитель 6 (фиг.7) заряда является трансимпедансной схемой. Предусилитель 6 преобразует электрический заряд, создаваемый датчиком, в пропорциональный сигнал напряжения. Реле 16, выполненное в виде переключателя или полевого транзистора и установленное в цепи отрицательной обратной связи, предназначено для разряда выбранного конденсатора 14 Cn и, следовательно, для подготовки оборудования. Выбранный резистор 14 Rn, установленный параллельно с конденсатором 14 Cn, образует фильтр высокой частоты с граничной частотой 1/RnCn и позволяет избежать проблем дрейфа. Коэффициент 1/Cn предусилителя 6 заряда выбирают при помощи реле (переключатель или полевой транзистор). Отдельные резистор Rin 15 и емкость Cin 15, выполненные с возможностью адаптации, установлены для балансировки схемы, уменьшения погрешностей сдвига постоянного или переменного питания от входных поляризационных токов.
Для контроля за неисправностями датчиков системы устанавливают монтажную схему, использующую ждущий однотактный мультивибратор 17 (фиг.8) с коммутацией прямого действия. Ждущий однотактный мультивибратор 17 выдает строб-импульс шириной t, пропорциональной RC, когда на вход А триггера 17 поступает восходящий фронт (или нисходящий фронт), при этом резистор 18 является контрольным резистором, установленным на двух контактах ждущего мультивибратора, регулируемого в зависимости от типа датчика. Значение емкости пьезоэлектрического датчика 1 пропорционально продолжительности строб-импульса. Измерив это время t, получают значение емкости С датчика 1.
Все n каналов приводят к стандарту параллельно при помощи n преобразующих схем, таких как схема 11 (фиг.5). Аналого-цифровые преобразователи дискретизируют информацию аналоговой схемы с точностью 16 бит с частотой передачи 20 Мбит/с. Преобразователи являются преобразователями параллельного типа. Они передают на схему ПВМ 19 сигналы через 16-битовую шину данных. Сигналы сопровождаются сигналом подтвержденной данной.
Схема ПВМ 19 предназначена для обработки в режиме реального времени и параллельно информации сразу после прохождения запрограммированного порога. В соответствии с настоящим изобретением обрабатывают следующие измерения:
- дату события (в зависимости от значения регистра с приращением при помощи часового импульса в 100 нс);
- номер канала;
- продолжительность сигнала;
- максимум;
- минимум;
- число прохождений порога;
- время повышения;
- время прохождения;
Схема ПВМ 19 реализует функцию считывания в реальном времени акустических событий, наступающих в результате столкновения, и вычисления в реальном времени параметров, характеризующих эти акустические события. Схема ПВМ 19 реализует функцию сохранения временных данных в динамическом ОЗУ, встроенном в схему ПВМ 19 для записи параметров события. Использование такого запоминающего устройства оправдано, если время запоминания измерений в постоянных запоминающих устройствах типа флэш-памяти ЭСППЗУ 23 является слишком длинным. Действительно, динамическое ОЗУ имеет скорость, превышающую время 70 нс, которое занимает запись информации в такой флэш-памяти ЭСППЗУ.
Функции контроля аналоговых схем и питания управляются схемой ПВМ 19. Они интегрированы в один единственный компонент.
В режиме диагностики система может передавать на схему ПВМ 19 все параметры, позволяющие произвести вычисление акустических параметров.
Для установки всех триггеров и регистров схемы ПВМ 19 в исходное положение используется сигнал перезагрузки. Этот сигнал поступает от процессора 20 (фиг.4).
Модуль ЦПУ содержит процессор 20, с которым соединено ОЗУ, ЗУ типа флэш-памяти 23, модуль 26 управления часами CLK, модуль перезагрузки RESET 22, периферийные устройства 27 ЧРВ, память ЭСППЗУ 24, при этом все они соединены при помощи синхронной шины последовательной передачи данных. Процессор 20 осуществляет операции загрузки и конфигурирования схем ПВМ 19 на основании параметров, хранящихся в массовом ЗУ типа флэш-памяти 19 или ЭСППЗУ 24, на основании повторного считывания из памяти 23 для передачи через приемо-передающее радиоустройство, на основании циклического контроля целостности схемы сбора данных, на основании контроля целостности запоминающих устройств, на основании контроля источников питания и на основании зарегистрированных даты и времени события путем извлечения значения часов ЧРВ 27.
Внутреннее динамическое ОЗУ схемы ПВМ 19 доступно через внутренние ресурсы схемы ПВМ 19 для записи 8-ми параметров для каждого канала при помощи процессора 20. Процессор 20 производит считывание 8-ми параметров для каждого канала и после этого записывает эти данные в ЗУ типа флэш-памяти 23. Размер памяти динамического ОЗУ может быть произвольным. Действительно, скорость потока данных во время записи данных во флэш-память 23 (порядка миллисекунды) намного превышает минимальное время между двумя последовательными столкновениями (порядка сотни микросекунд). Произвольно глубину динамического ОЗУ берут больше размера данных десяти столкновений.
Установлена система контроля между записью посредством схемы ПВМ 19 и считыванием в процессоре 20 (счетчики адресов). Динамическое ОЗУ хранит в памяти акустические события и типы проявившихся неисправностей, а также информацию контроля целостности сохраненных значений типа проверки сложения. Динамическое ОЗУ тестируется процессором 20 в фазе начальной загрузки.
Вычисление акустических данных, выделенных из импульсов, выполняется при помощи регистров. Регистр ПОРОГ содержит произвольное значение контрольного напряжения, выбранного оператором в зависимости от назначения. В частности, можно предусмотреть, чтобы значение ПОРОГ менялось в зависимости от того, находится ли самолет в фазе ожидания (даже технического осмотра) или в фазе полета. Предпочтительно параметр определяют во время проектирования и во время калибровки. Этот параметр заносится в память ЭСППЗУ 24. Этот параметр может изменяться через центральный блок локализации. Регистр Т-ПРОДОЛЖИТЕЛЬНОСТЬ содержит временную постоянную, которая является продолжительностью скользящего окна. Скользящее окно (фиг.1) позволяет схеме ПВМ 19 определить в режиме реального времени конец акустического импульса на канале и завершает процесс извлечения параметров. Значение регистра этого окна Т-ПРОДОЛЖИТЕЛЬНОСТЬ является параметром, определенным во время фазы проектирования и во время фазы калибровки. Оно может изменяться через центральный блок локализации. Окно Т-ПРОДОЛЖИТЕЛЬНОСТЬ активируется, как только происходит переход порога. Окно Т-ПРОДОЛЖИТЕЛЬНОСТЬ остается активным и может повторно включаться, пока происходит переход порога акустическим сигналом. Окно Т-ПРОДОЛЖИТЕЛЬНОСТЬ дезактивируется, когда в течение продолжительности Т-ПРОДОЛЖИТЕЛЬНОСТЬ не происходит превышение порога акустическим сигналом. Этот параметр сохраняется в памяти ЭСППЗУ 24. Этот параметр может меняться через центральный блок локализации.
Регистр содержит значение окна Т-АУТ_МАКС. Окно Т-АУТ_МАКС является постоянным значением времени, которое соответствует диапазону запрета сбора данных, позволяющему блокировать вторичные отраженные сигналы. Когда на канале обнаруживается акустический импульс, фильтруются последующие выборочные значения, соответствующие скачкам сигнала. Следовательно, сразу после конца сигнала на данном канале, то есть когда счетчик Т-ПРОДОЛЖИТЕЛЬНОСТЬ доходит до предела и сверх порога ПОРОГ сигнала нет, срабатывает счетчик Т-АУТ_МАКС. Пока этот счетчик Т-АУТ_МАКС не достигнет значения окна Т-АУТ_МАКС, схема ПВМ 19 не учитывает выборочные значения сигнала на этом канале. Этот параметр сохраняется в памяти ЭСППЗУ 24. Этот параметр может изменяться через центральный блок локализации.
Параметры акустических событий должны быть немедленно зарегистрированы, если все работающие датчики сигнализируют наличие акустического импульса после перехода порога ПОРОГ. Вместе с тем, некоторые датчики могут не выдавать сигнал о событии (неисправность датчика или слишком слабое пороговое напряжение). Необходимо предусмотреть предельную продолжительность Т-ЗВУК_МАКС, чтобы система не ждала события бесконечно. Этот параметр вычисляют при помощи процессора 20 на основании значений регистров Т-ПРОДОЛЖИТЕЛЬНОСТЬ и Т-АУТ_МАКС, хранящихся в ЭСППЗУ 24 и загружаемых в регистр схемы ПВМ 19. Время прохождения соответствует (n-1) x (Т-ПРОДОЛЖИТЕЛЬНОСТЬ + Т-АУТ_МАКС) (n является числом каналов).
Условие, позволяющее характеризовать конец столкновения и разрешить вычисления акустических параметров на каждом канале, определяется условием УСЛ1 или условием УСЛ2. На данном канале, когда обнаруживается сигнал, если счетчик достиг своего предела Т-ПРОДОЛЖИТЕЛЬНОСТЬ и не обнаружено событий на остальных каналах, отличных от канала, на котором сигнал уже охарактеризован, и если счетчик достиг своего предела Т-АУТ_МАКС, условие УСЛ1 выполнено. Если имеются каналы, на которых пока нет выборочного значения сверх порога, и если сигнал охарактеризован, по меньшей мере, на одном канале и счетчик достиг своего предела Т-ЗВУК_МАКС, условие УСЛ2 выполнено.
Функция автоматического отключения Watchdog 21 обеспечивает временной и логический контроль цикла программного обеспечения. Watchdog 21 является схемой, позволяющей обнаружить дефектный цикл программы процессора 20, как правило, когда процессор работает в постоянном режиме. Процессор 20 должен излучить импульс на определенной частоте в направлении Watchdog 21. В случае неисправности индивидуальные элементы программы обрабатываются за период времени, когда часы процессора 20 имеют аномалию, импульс не излучается, что заставляет срабатывать переключение Watchdog 21 на модуль перезарузки RESET 22, который определяет причину срабатывания и запускает перезагрузку процессора 20.
Идентификация типа срабатывания перезагрузки управляется модулем перезагрузки RESET 22 для определения причины повторного запуска оборудования.
Проверяются следующие случаи:
- восстановление внешнего питания после того, как оборудование полностью отключилось (отключение питания, холодная перезагрузка);
- восстановление внешнего питания до того, как оборудование полностью отключилось (отключение питания, горячая перезагрузка);
- перезагрузка RESET в результате внешней или внутренней ошибки обновления Watchdog 21;
- перезагрузка по причине внешней или внутренней перезагрузки Watchdog 21, управляемой протоколом.
В плане функций возникают следующие последствия:
Массовое запоминающее устройство является флэш-памятью 23 с размером, достаточным, чтобы содержать материальную конфигурацию процессора 20, программу запуска, прикладное программное обеспечение, совокупность записей акустических измерений и записи неисправностей, не касающихся неисправностей самого массового ЗУ.
Для подтверждения целостности данных процессор осуществляет циклические тесты.
ЭСППЗУ 24 сохраняет параметры конфигурации акустических измерений и параметры, используемые для автотестирования (порог, фильтры и т.д.), и хранит в памяти дефекты массового ЗУ: дефектный сектор.
Тесты на целостность содержат тесты контроля доступа, адресации, записи, считывания, сохранения (информация контроля целостности сохраненных значений типа верификатора сложения checksum). В зависимости от характера тестов они являются циклическими или асинхронными.
Оперативное ЗУ 25 является оперативной памятью с размером, достаточным, чтобы обеспечивать промежуточное сохранение переменных программного обеспечения и самой программы во время исполнения. Процессор 20 осуществляет тесты для подтверждения целостности ОЗУ 25. Циклические тесты состоят в периодическом считывании значений, ожидаемых в свободных зонах ЗУ, и хранящихся значений (информация контроля целостности сохраненных значений типа checksum). Эти тесты могут быть дополнены асинхронными тестами, которые предназначены для обнаружения сбоев во время адресации, записи, запоминания (информация контроля целостности сохраненных значений типа checksum) и считывания.
Модуль управления часами CLK Management 26 распределяет часы на преобразователи 11, на схему ПВМ 19, на процессор 20. Он также содержит средства управления часами для обеспечения слабых отклонений, для устранения превышений путем адаптации импедансов управляющей схемы к импедансу линий при помощи последовательно соединенных резисторов. Схема часов связана с контуром регулирования фазы.
Схема ЧРВ 27 является коробкой, содержащей кварц, и выдает дату в формате: год-месяц-день-час-минута-секунда. Точность составляет порядка секунды. В зависимости от установленного компонента ее интерфейс может быть в формате SPI или I2C. Этот компонент программируется, по меньшей мере, один раз за срок службы карты (инициализация часа). Устройство коррекции дрейфа этих часов не предусмотрено.
Управляющее устройство RS232 28 является специальной схемой типа МАХ232 для осуществления соединения с микрокомпьютером проверки при помощи соединения RS232. Эта схема обеспечивает преобразование сигналов TTL в сигналы RS232 и наоборот. К входным/выходным сигналам подсоединены двухсторонние диоды для защиты схемы от перенапряжений. Соответственно схемы защищены от коротких замыканий каналов.
Протокол связи на шине является стандартным синхронным последовательным протоколом SPI или I2C. Для данного варианта применения наиболее подходит шина последовательной передачи данных, использующая протокол I2C. К этой шине можно подсоединить периферийные устройства или управляющие устройства: ЭСППЗУ 24, ЧРВ 27, устройство управления связью шины, чтобы повысить функциональные возможности устройства в соответствии с настоящим изобретением. В частности, тестируют состояние шины между датчиками и центральным блоком, чтобы обеспечить постоянное считывание сигналов датчиков.
Связь может осуществляться при помощи беспроводных средств 29. В любом случае можно производить сбор данных, зарегистрированных оборудованием, на месте при помощи последовательного проводного соединения. Беспроводная связь позволяет осуществлять сбор данных на расстоянии примерно 10 метров. Для этого используют модуль типа 802.11b на несущей частоте 2,4 ГГц. Связь осуществляется по принципу «точка-точка».
Модуль контроля (фиг.4) детектирует слишком высокие уровни, а также слишком высокое потребление тока (короткие замыкания). Модуль МОНИТОРИНГ детектирует сбои, связанные с перебоями питания, и защищает систему от перенапряжения. Скачок или спад напряжения обнаруживаются достаточно рано, чтобы все выходы были приведены в состояние защиты при помощи программы отключения напряжения или чтобы произвести переключение на второй блок питания от аккумулятора. Модуль МОНИТОРИНГ напряжения контролирует вспомогательное напряжение и приводится в положение защиты, если напряжение не находится в рекомендованном диапазоне (верхний порог и нижний порог). Модуль МОНИТОРИНГ отключает подачу напряжения на систему с отключением защиты путем прекращения питания и регистрирует при этом всю критическую информацию, связанную с обеспечением безопасности.
Модуль ПИТАНИЕ (фиг.4) является блоком питания, содержащим преобразователь постоянного тока в постоянный, соответствующий авиационным стандартам СЕМ DO-160 категории В.
Кроме генерирования напряжения, необходимого для работы модуля ЦПУ, блок питания обеспечивает переключение на резервный источник питания типа аккумуляторной батареи в случае отключения внешнего источника питания.
Диаграмма состояния системы содержит следующие состояния.
Этап ЗАПУСК
Оборудование входит в фазу ЗАПУСК после того, как срабатывает сигнал перезагрузки RESET, управляемый системой управления перезагрузки RESET Management 22.
Если падение или потеря напряжения питания системы длится дольше, чем Т-БАТ1 (параметр ЭСППЗУ 24), и если от схемы автоматического отключения Watchdog 21 не поступает сигнала RESET, то в случае возврата к уровню нормального напряжения в течение продолжительности Tpower_recovering (параметр, хранящийся в ЭСППЗУ 24), система должна произвести повторную установку, проверяя функциональные возможности питания.
Поведение на этапе запуска
При запуске оборудование тестирует все жизненные функции системы: целостность ПЗУ, ОЗУ, массового ЗУ, ЭСППЗУ 24, информацию, поступающую от RESET Management 22, разъединения в сети питания, уровень напряжения от внешнего источника питания, емкость резервного источника питания, целостность датчиков, утечки на плюс и на массу, конфигурацию (число датчиков в наличии).
Реле 16 (RESET), установленное в цепи отрицательной обратной связи, приводится в замкнутое положение для разряда выбранного конденсатора 14 Cn и для подготовки оборудования.
Тесты являются программами. Ни в коем случае система не включается в процесс акустического измерения.
Система завершает этап запуска для номинальной работы, когда конфигурация линий проверена и если уровень напряжения питания является приемлемым и/или если резервный источник питания емкостного типа заряжен до приемлемого уровня.
Оборудование остается на этапе запуска, если значение напряжения питания находится за пределами диапазона.
Этап запуска повторяется, если тесты ПЗУ и ОЗУ 25 обнаруживают ошибки.
Оборудование переходит от этапа запуска к этапу выключения shutdown при наличии, по меньшей мере, одной неисправности, при которой протоколом ошибок предусмотрено отключение оборудования.
Переключатель между пьезоэлектрическим датчиком 1 и аналоговой схемой установлен на предусилитель 6 заряда. Контакт реле 16 (RESET), установленного в цепи отрицательной обратной связи предусилителя, разомкнут.
Оборудование возвращается на этап в фазе номинальной работы в конце этапа запуска.
Периодическая диагностика
Во время фазы номинальной работы оборудование осуществляет периодическое автотестирование. Оборудование должно подтвердить условия, в которых осуществляется акустическое измерение (проверка нормального хода выполнения алгоритма, перезаряда батареи, сохранения данных в запоминающих устройствах и т.д.).
Во время фазы номинальной работы оборудование производит диагностику на асинхронных действиях (протокол связи, контроль доступа, считывание/запись в ЗУ, превышение порога при утечках).
Если какая-либо неисправность связана со стратегией отключения shutdown или если падение или потеря напряжения питания устройства или оборудования длится дольше Т-БАТ1 (параметр, хранящийся в ЭСППЗУ 24), оборудование возвращается в режим выключения.
При обнаружении критической ошибки оборудование возвращается в режим выключения. Диагностика продолжается только для напряжения питания и микроотсечек. Беспроводное контрольное устройство продолжает управлять беспроводной связью, диагностика которой продолжается.
Беспроводная связь разрешается. Отключение питания приводит к остановке устройства или оборудования. Оборудование запускается повторно, переходя в этап запуска, если возобновляется питание блока от сети и если уже не сработал сигнал перезагрузки RESET.
Оборудование производит частичное отключение при неисправностях в линиях измерения: утечки на линиях. Диагностика неисправной линии блокируется, а другие линии остаются функциональными. Неисправность сигнализируется, но система остается в своем состоянии.
Реферат
Для решения проблемы технического обслуживания самолета самолет оборудуют устройством постоянного контроля, которое содержит пьезоэлектрические датчики. Сигналы, излучаемые датчиками, регистрируются в постоянном режиме. Из них делают вывод об усталости, которой подвержены критические части самолета. Таким образом улучшается контроль критических частей. Благодаря этому снижаются затраты по операциям технического обслуживания. 2 н. и 9 з.п. ф-лы, 8 ил.
Формула
осуществляют мониторинг ряда зон самолета в режиме постоянного времени, для чего используют множество пьезоэлектрических датчиков на каждую зону
устанавливают пьезоэлектрические датчики на частях конструкции, предназначенных для мониторинга,
определяют условия, в которых производятся измерения,
определяют верхнюю и нижнюю границы порога, за пределами которого принимают решение об измерении сигнала, при этом упомянутый порог изменяют в зависимости от того, находится ли самолет в полете или на стоянке,
указанные сигналы являются результатом присутствия акустической волны в конструкции в месте установки пьезоэлектрических датчиков,
осуществляют измерение сигнала в течение около 100 микросекунд при каждом акустическом событии,
определяют число переходов сигналом порога, причем выделяют сигнал, который находится в частотном диапазоне от 20 кГц до 2 МГц,
преобразуют полученные акустические сигналы в аналоговые электрические сигналы,
считывают и обрабатывают сигналы, поступающие от датчиков в цифровой блок обработки сигнала во время полезного срока службы самолета на земле и в воздухе,
для постоянного считывания подтверждают исправную работу совокупности пьезоэлектрических датчиков, соединенных с цифровым блоком обработки сигнала,
подают сигнал тревоги в случае обнаружения неисправности пьезоэлектрического датчика, или обрыва шины связи, или сбое оборудования,
обеспечивают постоянное питание элементов устройства мониторинга.
контрольных параметров датчика,
даты измеренного акустического события,
частоты волны измеренного акустического события,
числа полуволн сигнала, значение которого находится над порогом,
продолжительности пачки импульсов полуволн сигнала, значение которого находится над порогом,
максимального значения измеренного сигнала,
минимального значения измеренного сигнала,
времени повышения измеренного сигнала,
частотного спектра измеренного сигнала,
времени запаздывания измеренного сигнала.
проверяют подключение пьезоэлектрических датчиков,
проверяют при помощи функции автоматического отключения, чтобы центральный блок обработки не работал в замкнутом режиме,
осуществляют мониторинг четырех зон самолета, для чего используют 24 датчика на зону, при этом упомянутыми зонами являются купол радиолокационной антенны самолета, передние кромки крыльев самолета и хвостовое оперение самолета,
сохраняют сигнал в скоростном буферном ЗУ для записи событий, продолжительность которых короче времени запоминания в запоминающем устройстве типа ЭСППЗУ,
определяют верхний порог сигнала и при сигналах, превышающих этот порог, включают сигнал тревоги.
установленное на борту самолета устройство обнаружения, включающее в себя множество пьезоэлектрических датчиков, установленных на частях конструкции и предназначенных для непрерывного мониторинга каждой зоны самолета и измерения сигнала в течение около 100 микросекунд при каждом акустическом событии, определяемом величиной верхнего и нижнего порога, причем сигнал находится в частотном диапазоне от 20 кГц до 2 МГц,
устройство сбора информации, поступающей от датчиков, включающее в себя: преобразователь акустического сигнала в аналоговый электрический сигнал, цифровой блок обработки сигнала, супервизор (контроллер), обеспечивающий сбор и передачу данных в запоминающее устройство, детектирование неисправностей системы и координирование своевременного считывания данных цифровым блоком обработки данных, поступающих в буферные ЗУ и массовые ЗУ сверхбольшой емкости, позволяющие системе собирать большие количества данных, устройство диагностики (ПК), связанное с супервизором и конфигурированное для постоянной загрузки, записи, считывания и обработки сигналов, поступающих от пьезоэлектрических датчиков во время полезного срока службы самолета на земле и в воздухе, вывода данных на дисплей, конфигурацию и калибровку оборудования, включая пороговые значения параметров оборудования в зависимости от того, находится ли самолет в полете или на земле, и времена релаксации после события, передачи данных в массовое ЗУ, а также для подтверждения исправной работы указанного множества пьезоэлектрических датчиков,
бортовое устройство, обеспечивающее безопасность работы установленного на борту самолета устройства обнаружения,
блок сигнализации аварийного состояния, предназначенный для подачи сигнала тревоги в случае обнаружения неисправности пьезоэлектрического датчика или обрыва цепи или сбоя оборудования,
блок питания, установленный на борту самолета и предназначенный для обеспечения постоянного питания элементов системы мониторинга.