Бесконтактный датчик микрорельефа - RU2688902C1
Код документа: RU2688902C1
Чертежи

Описание
Изобретение может использоваться в качестве сенсора в составе электронно-механических устройств, предназначенных для аттестации поверхности из металлов и диэлектриков, а также их комбинации, с применением метода механического сканирования, в том числе, для выявления и измерения микрорельефа, а также с целями дефектоскопии поверхности и обнаружения неоднородности приповерхностных слоев в широком диапазоне размеров, от миллиметров до долей микрометра, в том числе, в труднодоступных местах, например, при профилактическом исследовании металлических и полимерных стенок трубопроводов, используемых для перекачки агрессивных жидкостей, включая нефтепродукты.
Аналогами бесконтактного датчика микрорельефа (БДМ) является целое семейство датчиков, применяемых в так называемой микроскопии ближнего поля, например, описанные в обзоре [Bjorn Т. Rosner, Daniel W. van der Weide. "High-frequency near-field microscopy". Review of Scientific Instruments 73, 2505 (2002); https://doi.Org/10.1063/l.1482150]. Это активные датчики, которые, в отличие от сенсоров дальнего поля (радаров), воздействуют электромагнитным полем на испытываемую поверхность, находящуюся на расстояниях малых по сравнению с зоной концентрации поля, излучаемого датчиком (от миллиметров до долей микрометра). Такой датчик, или линейка датчиков (мульти датчик), связан со специализированными электронными цепями, в качестве которых может выступать, в том числе, стандартный измеритель импеданса (измеритель S-параметров), который регистрирует уровень отражения и прохождения токов в цепях датчика в зависимости от его зазора с поверхностью. Результаты измерений могут быть обработаны с помощью персонального компьютера (ПК), используя специальное программное обеспечение (ПО). Методы создания такого ПО описаны, например, в [СВ. Китаев. Основы технической диагностики объектов транспорта и хранения нефти и газа. Электронный учебно-методический комплекс.
http://doidpo.rusoil.net/pluginfile.php/15820/mod resource/content/1/Fundamental s%20of%20technical%20diagnostics/index.html]. Такое ПО визуализирует вариации импеданса датчика в координатах исследуемой поверхности, и после соответствующей калибровки, позволяет получить математически точное описание рельефа или карту неоднородностей в объеме, прилегающем к поверхности за счет пористости или чужеродных включений.
Конструктивно, чувствительная зона известных датчиков ближнего поля (ДБП) располагается вблизи конца волновода, например, коаксиального кабеля, который может быть магнитным излучателем, если оснащен проволочной петлей, как описано в работе [М. Kanda, "An Electromagnetic Near-Field Sensor for Simultaneous Electric and Magnetic-Field Measurements," IEEE Transactions on Electromagnetic Compatibility (Volume: EMC-26, Issue: 3) pp.102-110 (Aug. 1984) https://doi.org/10.1109/TEMC. 1984.304200].
Другим семейством-аналогом в области дефектоскопии можно назвать чисто магнитные сенсоры для труб, изготовленных из ферромагнитных сплавов, в которых дефекты (раковины) выявляются по изменению магнитного зазора между стенкой трубы и магнитной головкой. Такие головки устанавливаются на самодвижущийся носитель, который имеет возможность передвигаться внутри стальной трубы. Такой носитель может быть запрограммирован и накапливать информацию о магнитном низкочастотном взаимодействии головок со стенкой трубы с учетом координаты передвижения носителя вдоль трубы, см., например, [Внутритрубный индикатор дефектов промысловых трубопроводов. http://intron-vtd.ru/4.html]. Однако магнитные датчики могут работать только с изделиями из ферромагнитных сплавов.
Недостаток существующих датчиков, как ближнего СВЧ поля, так и магнитных, описанных выше, заключается в их чувствительность к расстоянию от идеальной поверхности. С одной стороны, чувствительность к расстоянию является мерой выявления микрорельефа, но с другой стороны, такой же эффект возможен вследствие неидеальности сканирующей механики, что может приводить к неравномерности зазора между зондом и поверхностью в процессе движения датчика вдоль волнистой (в целом бездефектной) поверхности. При этом снижает чувствительность и точность измерений, появляются систематические ошибки, а случайные или периодические вибровоздействия, могут приводить к ложному заключению о качестве исследуемой поверхности.
Наиболее близкий прототип резонансного датчика ближнего поля описан в работе [D.Е. Steinhauer, С.P. Vlahacos, S.К. Dutta, В.J. Feenstra, F.С.Wellstood, and S.М. Anlage, "Quantitative imaging of sheet resistance with a scanning near-field microwave microscope." Appl. Phys. Lett. 72, 861 (1998) https://doi.Org/10.1063/l.120918]. Датчик-прототип представляет собой отрезок цилиндрического коаксиального кабеля (ниже - коаксиала), который имеет длину около половины дины волны на частоте измерительного тока. С одного конца центральная жила коаксиала подключена к измерителю коэффициента отражения через конденсатор малой емкости, а на другом, зондирующем конце центральная жила располагается как можно ближе к исследуемой поверхности так, что имеет с ней заметную электрическую емкость. При изменении рельефа поверхности происходит изменение электрической емкости зондирующего конца датчика с поверхностью, и возникает изменение уровня сигнала, отраженного от резонатора, что рассматривается как обнаружение неоднородности аттестуемой поверхности. Зондовый конец резонатора и исследуемая поверхность передвигаются относительно друг друга с помощью X-Y-Z транслятора. Измеренный комплексный коэффициент отражения как функция координат используется для построения карты поверхности. Разрешение в плоскости сканирования составляет десятые доли от поперечного сечения зондового конца резонатора, то есть зависит от возможностей его миниатюризации, и составляет около 10 мкм.
Недостатком датчика-прототипа, как было упомянуто выше, является невозможность разделить два разных эффекта, вызывающие отклик датчика: изменение расстояния до идеальной поверхности и наличие дефекта поверхности, так как комплексный коэффициент отражения такого резонатора со стороны измерительной системы зависит, в первом приближении, от емкости зондового конца, то есть от расстояния между зондовым концом резонатора и исследуемой поверхностью.
Технический результат выражается в том, что новый бесконтактный датчик микрорельефа позволяет разделить сигнал на два канала, в которых по отдельности регистрируются сигналы, зависящие от расстояния между датчиком и поверхностью, и сигналы, зависящие от градиента рельефа в активной области датчика. Такой датчик позволяет принципиально повысить чувствительность и информативность измерений в режиме микроскопии ближнего электромагнитного поля.
Технический результат достигается тем, что бесконтактный датчик микрорельефа, состоящий из одного или нескольких микроволновых резонаторов, каждый из которых расположен вблизи исследуемой поверхности, и работающих с использованием эффекта изменения амплитуды стоячей волны в резонаторе в зависимости от формы зазора между резонатором и поверхностью, а также от свойств материала поверхности в области ее взаимодействия с резонатором, и отличающийся тем, что в качестве резонатора используется планарная структура на диэлектрической подложке, содержащая две резонансные щели, синфазно возбуждаемых высокочастотным сигналом, и снабженная отдельным портом для считывания противофазного сигнала таких резонансных щелей.
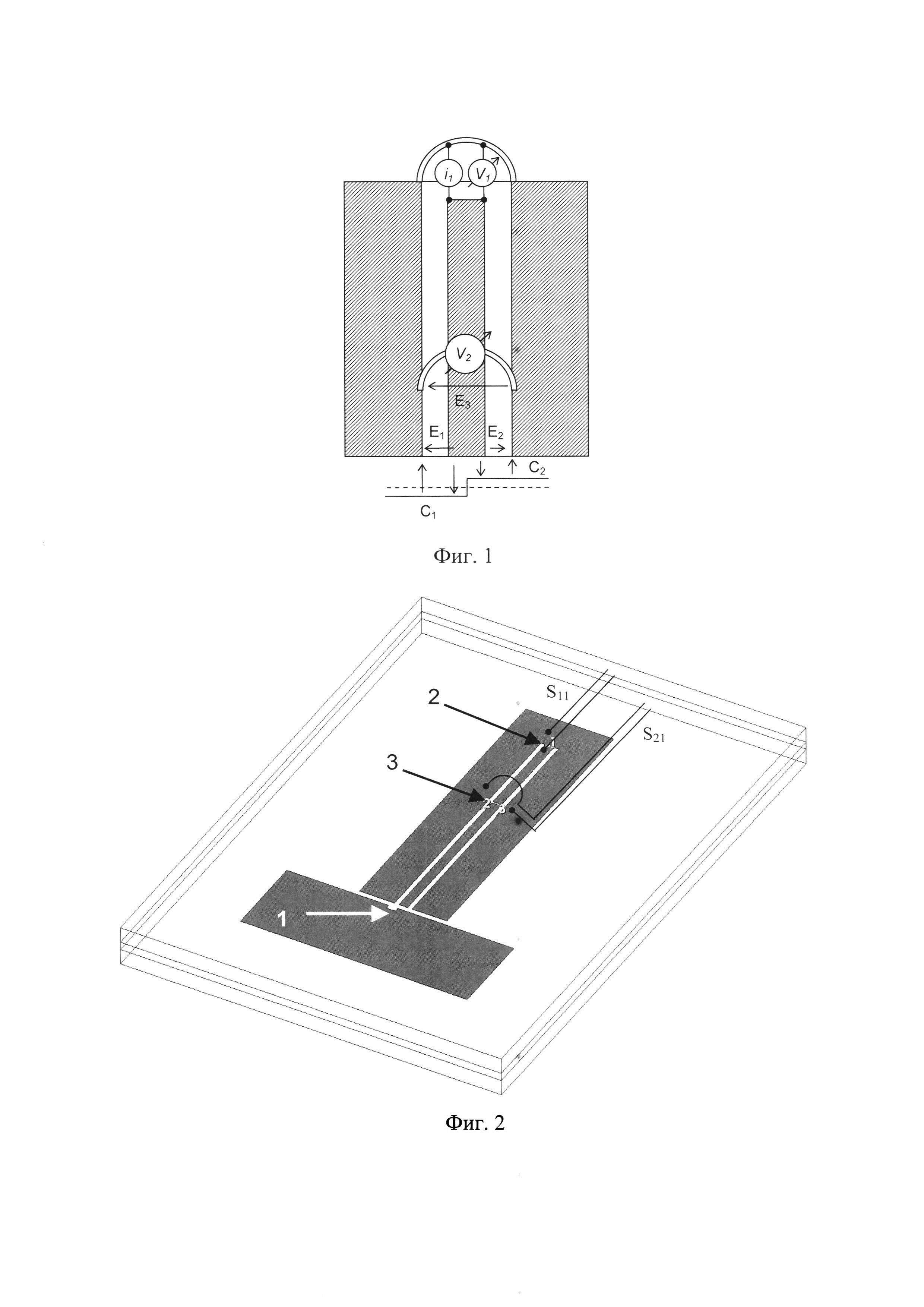
Фигура 1 качественно иллюстрирует топологию и принцип работы нового датчика. Синфазное возбуждение двух щелей производится источником i1 и, измеряя напряжение V1, можно измерить импеданс этой симметричной (четной) моды. Если амплитуды в двух щелях не равны между собой или эти колебания не синфазны, то их разница регистрируется измерителем V2. Стрелками на Фиг. 1 показаны векторы электрического поля щелей E1 и Е2. Разностная (нечетная) мода характеризуется вектором-суммой E3=E1+E2, то есть она является комбинацией полей двух щелей и регистрируется как сигнал перемычки V2. Для четной моды копланарного волновода всегда выполняется условие V2=0, то есть нечетная мода не может возникнуть при сохранении полной симметрии или при простом изменении расстояния между открытыми концами двух щелей резонатора и поверхностью, если датчик и поверхность взаимно ортогональны. При наличии микро-градиента поверхности, сигнал V2 становится отличным от нуля. Регистрируемый ток в перемычке можно назвать дифференциальным сигналом двух щелей, а сам датчик дифференциальным сенсором, так как, из-за разной электрической емкости каждой из щелей с поверхностью, амплитуды противонаправленных полей Е1 и Е2 не равны и не могут компенсировать друг друга. В показанной на Фиг. 1 конфигурации измерители V1 и V2 по отдельности регистрируют интегральный и дифференциальный сигналы датчика, что более точно (с большим разрешением) характеризует профиль поверхности.
Фигура 2 представляет собой эскиз технической реализации устройства с применением технологии печатных плат или технологии тонких пленок. Данная структура является точным трехмерным изображением электромагнитной модели, выполненной в лицензионной программе электромагнитного моделирования "Microwavw Office" (MWO) фирмы NI AWR (США). Расчеты, проведенные с помощью данного программного обеспечения, использованы для подтверждения заявленных электродинамических свойств нового датчика. Внешние по отношению к устройству электродинамические цепи - волноводы (коаксиальные кабели) не показанны, так как они могут иметь стандартные решения и не претендуют на оригинальность. Цифрами на Фиг. 2 обозначены: 1 - электромагнитный эквивалент металлической поверхности с дефектом, который указан стрелкой и находится в активной области устройства; 2 - электромагнитный порт возбуждения резонатора, которому присвоен схемный номер порта №1, и к которому подключается регистратор V1 (см. Фиг. 1) для регистрации отражения (параметра S11); 3 - последовательное включение электромагнитных портов №2 и №3, к которым подключается регистратор V2 (см. Фиг. 1 справа) для измерения параметра S21. Внешние по отношению к устройству электродинамические цепи - волноводы (коаксиальные кабели) подключаются к портам 2 и 3 и показаны условно в виде двухпроводных линий. Физические элементы этих цепей не показанны, так как они могут иметь стандартные решения и не претендуют на оригинальность. Длина щелей составляет около 3/4 длины электромагнитной волны в щели с учетом коэффициента диэлектрической проницаемости подложки. В центральном проводнике копланарной линии на расстоянии половины длины волны от чувствительной зоны имеется узкий разрыв, играющий роль возбуждающей емкости, аналогично малому конденсатору в коаксиальном прототипе https://doi.org/10.1063/1.1482150.
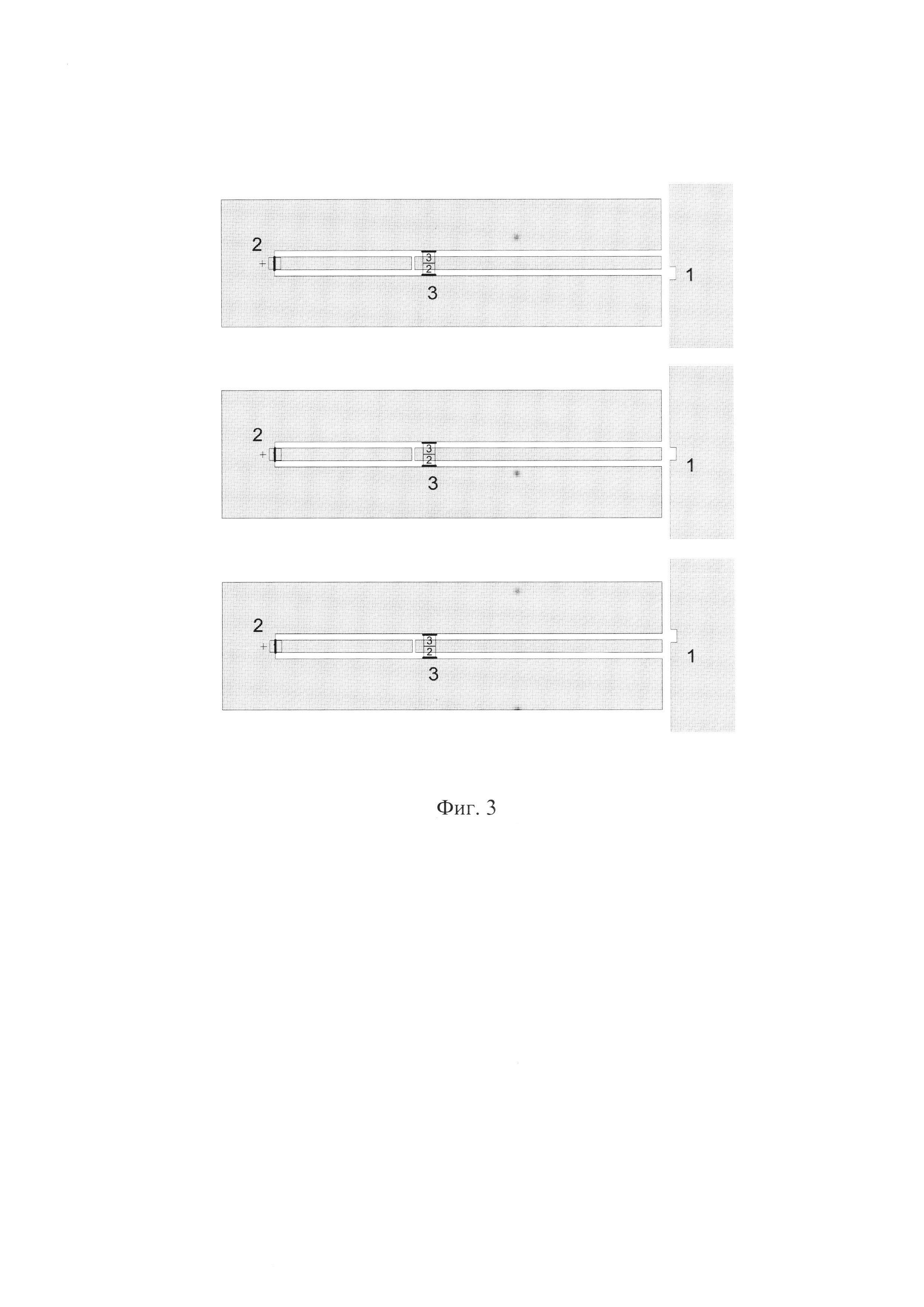
Фигура 3 иллюстрирует взаимные электродинамические конфигурации датчика и поверхности, примененные для демонстрации взаимодействия нового датчика с неоднородностью. Неоднородность в виде выемки в металле глубиной 250 мкм и длиной 500 мкм (справа) и собственно планарный датчик постепенно передвигаются относительно друг друга. Показаны три характерных случая взаимного расположения: два несимметричных, но зеркальных относительно оси датчика и третий, симметричный относительно его оси. Цифровые обозначения на Фиг. 3 совпадают с обозначениями на Фиг. 2.
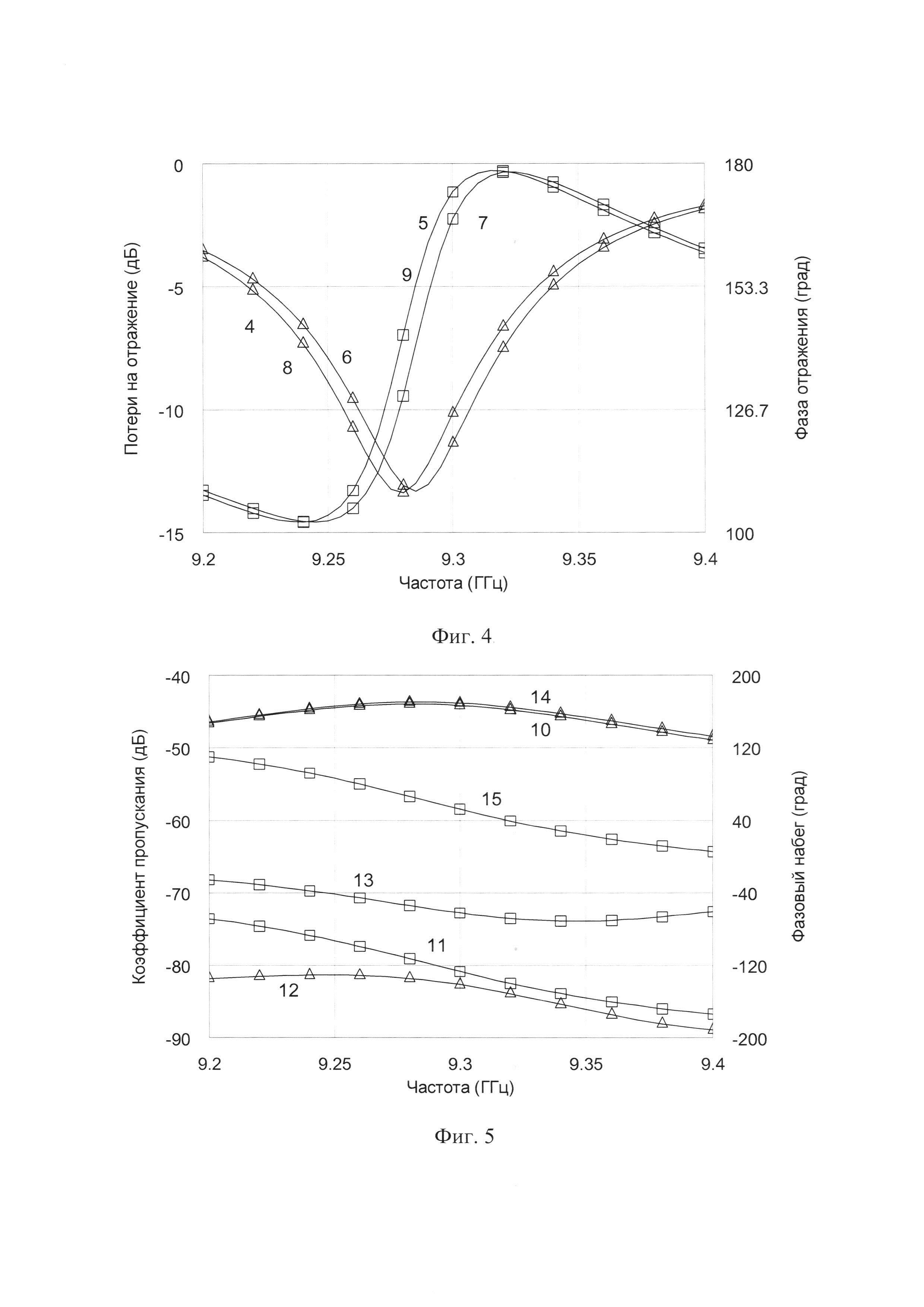
Фигура 4 демонстрирует результаты моделирования отражения структуры, представленной на Фиг. 2, при ее последовательной модификации сдвигом, как показано на Фиг. 3 (последовательность модификации - сверху вниз). Соответствующие зависимости амплитуды и фазы отраженного сигнала представлены как стандартный параметр S11 (комплексный коэффициент потерь отражения). Кривая 4 (амплитуда) и кривая 5 (фаза) соответствуют случаю, когда электромагнитный эквивалент металлической поверхности с дефектом находится, как показано в верхней части Фиг. 3. Кривые 6 (амплитуда) и 7 (фаза) соответствуют случаю, когда неоднородность находится в среднем положении, как показано в средней части Фиг. 3. Кривые 8 (амплитуда) и 9 (фаза) соответствуют случаю, когда неоднородность находится в нижнем положении, как показано в нижней части Фиг. 3. Из Фиг. 4 видно, что в верхнем и нижнем положениях, которые показаны на Фиг. 3. характеристики S11 неотличимы друг от друга. Данные на Фиг. 4 получены с использованием электромагнитной модели, в которой электромагнитные порты №2 и №3 соединены воздушным мостиком, нагруженным импедансом 50 Ом (вторым портом измерителя цепей), как показано на Фиг. 1. Из Фиг. 4 видно, что изменения амплитуды отраженного сигнала не превышают 1 дБ по амплитуде и 10 градусов по фазе, при этом существуют некоторые (симметричные) положения дефекта, при которых сигнал имеет те же параметры. Это может приводить к повторному детектированию одной и той же неоднородности, но при других взаимных координатах сенсора и исследуемого объекта (повторное, ложное обнаружение). Представленные на Фиг. 4 данные отражают фундаментальное ограничение по разрешению как для прототипа в его классическом коаксиальном исполнении, так и для копланарного сенсора в его одномодовом исполнении.
Фигура 5 демонстрирует результаты моделирования нового сенсора с добавленным каналом считывания дифференциальной моды V2 (см. Фиг. 1). На Фиг. 5 представлен коэффициент прохождения на второй порт измерителя цепей S21 рассчитанный для разных положений неоднородности, полностью аналогично тому, как это сделано для построения Фиг. 4. Кривая 10 (амплитуда) и кривая 11 (фаза) соответствуют случаю, когда электромагнитный эквивалент металлической поверхности с дефектом находится, как показано в верхней части Фиг. 3. Кривые 12 (амплитуда) и 13 (фаза) соответствуют случаю, когда неоднородность находится в среднем положении, как показано в средней части Фиг. 3. Кривые 14 (амплитуда) и 15 (фаза) соответствуют случаю, когда неоднородность находится в нижнем положении, как показано в нижней части Фиг. 3. Кривые 10 и 14 на Фиг. 5 показывают, что одинаковые неоднородности рельефа, расположенные симметрично, дают одинаковый, но несравнимо больший отклик относительно симметричного положения (кривая 12). Этот отклик составляет более 30 дБ (1000 раз) вместо 1 дБ (1,2 раза) у прототипа, то есть, примерно, в 5000 раз больше. При этом сдвиг фазы, показанный кривыми 11 и 15 достигает 180 градусов вместо 10 градусов у прототипа и плавно меняется от отрицательных до положительных значений. Это позволяет различать не только абсолютную величину, но и направление градиент профиля неоднородности, устраняя эффект повторного (ложного) обнаружения. График на Фиг. 5 характеризует технический результат применения нового сенсора, демонстрируя возможность многократного повышения динамического диапазона измерения, а следовательно и чувствительности, с помощью нового сенсора.
Изобретение осуществляется следующим образом. Определяется масштаб микрорельефа, подлежащий регистрации и частота, на которойбудет производится такая регистрация. В первом приближении, размер щелей в металле должен быть одного порядка с размером детектируемой неоднородности (по ширине и глубине). Детальная геометрия линии выбирается с учетом других общих правил конструирования СВЧ устройств. Методами фотолитографии изготавливается планарная структура резонатора, показанная выше на Фиг. 2 и Фиг. 3, но не включающая в себя электромагнитный эквивалент металлической поверхности с дефектом, обозначенный на Фиг. 2 и Фиг. 3 цифрой 1. В качестве заготовки может быть использован либо стандартный фольгированный металлом (медью) диэлектрик (стеклотекстолит, высокочастотный ламинат и др.), либо применены методы тонкопленочной технологии, позволяющие наносить тонкие пленки металла или диэлектрика на диэлектрическую подложку и добиваться самой высокой точности и предельной миниатюризации устройства. К точке 2 (электромагнитный порт возбуждения резонатора) подключается, в зависимости от выбюранных габаритов сенсора, стандартный коаксиальный разъем или - переход на микрополосковую, коаксиальную или щелевую линию, оснащенную стандартным коаксиальным разъемом и образующую порт №1 регистратора Vi (см. Фиг. 1) для измерения отражения на основной моде копланарного резонатора (параметр S11); к узлу 3, используя стандартную технологию симметричных фидеров (например, телевизионных антенн), подключается двупроводная или щелевая линия с металлизацией, лежащей в плоскости перпендикулярной подложке сенсора и имеющая на другом конце адаптер перехода на нужный тип линии (коаксиал или микрополосок), к которому подключается порт №2 измерителя цепей для регистрации параметра S21 дифференциального сигнала V2 (паразитной моды копланарного волновода). Готовый сенсор закрепляется на подвижной платформе, обеспечивающей механическое сканирование аттестуемой поверхности на расстоянии порядка ширины щелей. В процессе механического сканирования производится запись, а в дальнейшем -сопоставление, амплитуды и фазы сигнала S2i и соответствующих им координат поверхности, используя подходящее для этого программное обеспечение.
На Фиг. 6 схематически показаны возможные конфигурации из нескольких датчиков (мультидатчик): для тестирования плоской поверхности по принципу планшетного сканнера (слева) и для криволинейной поверхности, например, для продольной внутритрубной диагностики (справа).
Принцип действия устройства состоит в том, что сигнал переменного тока подается на проводник в точке 2 (см. Фиг. 2) и возбуждает резонатор, в котором устанавливается режим стоячей волны, определяемый длиной резонатора и его граничными условиями. Одно из граничных условий фиксировано (со стороны возбуждающего электрода 2), а второе зависит от конфигурации зазора с исследуемой поверхностью 1 и свойств самой поверхности, конкретнее, от импеданса поверхности на частоте резонатора. Импеданс резонатора в точке возбуждения 2 измеряется стандартным двухпортовым анализатором цепей переменного тока в режиме отраженного сигнала (S11). Уровень дифференциального сигнала измеряется как прошедший сигнал с бокового вывода 3 тем же анализатором (S21). Описанный датчик или образец устанавливается на подвижную платформу X-Y-Z, как показано на Фиг. 6, которая движется вдоль поверхности заданным образом под управлением ПК. При движении платформы X-Y-Z вдоль идеальной геометрической плоскости с однородными свойствами импеданс резонатора в точке 2 и уровень сигнала в точке 3 не меняются, причем сигнал в точке 3 близок к нулю. Если в движении платформы X-Y-Z возникает паразитная вибрация в нормальном к поверхности направлении, то импеданс в точке 2 может изменяться в соответствие с изменением зазора. То же самое может происходить при нарушении центровки датчиков в трубопроводе, изображенном на Фиг. 6 справа. При этом уровень дифференциального сигнала в точке 3 (S21) будет оставаться пренебрежимо малым, так как сохраняется локальная симметрия поля датчика. Если имеется неоднородность материала, или же на поверхности присутствует загрязнение в виде выступа или раковины коррозии, то при определенном положении платформы импеданс двух щелей датчика становится неодинаковым, и в точке 3 появляется отличный от нуля сигнал нечетной моды, как представлено на Фиг. 5. Разрешение (точность обнаружения) описанных неоднородностей зависит от ширины щелей датчика и от расстояния до поверхности. Оптимальным можно считать условие, когда зазоры и расстояние до поверхности имеют одинаковый порядок с размером ожидаемой шероховатостью поверхности. С применением литографии микронного разрешения эта точность может составлять доли микрометра. Устанавливая в систему различные датчики, можно независимо оптимизировать диапазон измеряемых неоднородностей, как по масштабу в плоскости, так и по амплитуде рельефа.
Реферат
Изобретение может использоваться для выявления и измерения микрорельефа поверхности из металлов и диэлектриков, а также с целями дефектоскопии поверхности и обнаружения неоднородности приповерхностных слоев. Бесконтактный датчик микрорельефа состоит из одного или нескольких микроволновых резонаторов, расположенных вблизи исследуемой поверхности и работающих с использованием эффекта изменения амплитуды стоячей волны в резонаторе в зависимости от формы зазора между резонатором и поверхностью, а также от свойств материала поверхности в области ее взаимодействия с резонатором. Согласно изобретению в качестве резонатора использована планарная структура на диэлектрической подложке, содержащая две резонансные щели, синфазно возбуждаемые высокочастотным сигналом, и снабженная отдельным портом для считывания противофазного сигнала таких резонансных щелей. Изобретение обеспечивает возможность разделить сигнал на два канала, в которых по отдельности регистрируются сигналы, зависящие от расстояния между датчиком и поверхностью, и сигналы, зависящие от градиента рельефа в активной области датчика, кроме того, такой датчик позволяет принципиально повысить чувствительность и информативность измерений в режиме микроскопии ближнего электромагнитного поля. 6 ил.
Комментарии