Генератор волны сжатия и поршневая система - RU2562872C2
Код документа: RU2562872C2
Чертежи




Описание
Область техники
Настоящее изобретение имеет отношение к созданию генератора волны сжатия, предназначенного для генерирования волны сжатия в среде.
Уровень техники
Различные химические реакции, которые трудно осуществить при низких температурах или давлениях, могут протекать более быстро и эффективно при более высоких температурах и давлениях. Генераторы волны сжатия могут быть использованы для создания волн сжатия, которые могут быть использованы для сжатия среды, передачи части энергии волны сжатия в эту среду, возбуждения энергии в среде за счет концентрации энергии волны сжатия, и/или для инициирования химических реакций или физических изменений в среде. Средой может быть твердое тело, жидкость или газ.
Раскрытие изобретения
В изобретении приведены различные примеры генераторов волны сжатия и способов использования генераторов волны сжатия. В различных вариантах осуществления, указанные способы и генераторы могут быть использованы для генерации, увеличения и/или использования волны сжатия высокой интенсивности, направленной в реакционную камеру, чтобы инициировать или повышать эффективность химических или физических реакций в среде в камере. Например, варианты осуществления способов и генераторов могут быть использованы для повышения температуры, давления, энергии и/или плотности среды, так чтобы реакции, которые трудно или экономически невыгодно проводить при более низких температурах, давлениях, энергиях и/или плотностях, могли быть проведены более быстро и/или более эффективно при более высоких температурах, давлениях, энергиях и/или плотностях, обеспеченных за счет описанных здесь вариантов осуществления способов и генераторов.
В соответствии с другим аспектом настоящего изобретения, предлагается генератор волны сжатия, имеющий поршень с тягой управления, которая движется вперед в поршень во время соударения поршня с преобразователем, связанным со средой.
В соответствии с еще одним аспектом настоящего изобретения, генератор волны сжатия содержит тягу управления, которая может двигаться или скользить в направляющей в поршне. Генератор волны сжатия содержит систему демпфирования, выполненную так, чтобы тормозить тягу управления независимо от поршня.
В соответствии с еще одним аспектом настоящего изобретения, предлагается генератор волны сжатия с механизмом приведения в движение (с механизмом пуска) поршня, который содержит группы клапанов для непосредственного ввода газа высокого давления позади поршня, чтобы начать движение поршня. Когда поршень движется вдоль внутреннего канала кожуха генератора волны сжатия, поршень открывает газовые каналы в кожухе, что позволяет дополнительно вводить газ высокого давления, чтобы прикладывать дополнительную движущую силу к поршню, так чтобы ускорять поршень в направлении к преобразователю, связанному со средой.
В соответствии с еще одним аспектом настоящего изобретения, предлагается генератор волны сжатия, который содержит подвижный поршень, имеющий первую поверхность и вторую поверхность и продольную ось между первой поверхностью и второй поверхностью. Поршень содержит направляющую, идущую вдоль продольной оси поршня от первой поверхности по меньшей мере частично ко второй поверхности (от первой поверхности почти до второй поверхности). Генератор волны сжатия также содержит кожух, имеющий внутренний канал, первый конец и второй конец, причем поршень по меньшей мере частично расположен внутри внутреннего канала кожуха.
Поршень выполнен с возможностью перемещения внутри внутреннего канала кожуха от первого конца ко второму концу, в направлении, параллельном продольной оси поршня. Генератор волны сжатия также содержит тягу управления, идущую продольно от первого конца ко второму концу, причем второй конец тяги управления выполнен так, что он может быть вставлен в направляющую и может перемещаться в направляющей без выхода (выпадения) из направляющей во время перемещения поршня внутри внутреннего канала. Генератор волны сжатия также содержит преобразователь, со скольжением установленный во втором конце кожуха. Преобразователь выполнен с возможностью соединения со средой и приспособлен для преобразования части кинетической энергии поршня в волну сжатия в среде, при соударении поршня с преобразователем. Генератор волны сжатия также содержит генератор движущей силы, позволяющий ускорять подвижный поршень в направлении к преобразователю, причем, при соударении поршня и преобразователя, второй конец тяги управления перемещается в направляющей ко второй поверхности поршня.
В соответствии с еще одним аспектом настоящего изобретения, направляющая идет продольно от первой поверхности поршня до своего внутреннего конца, смещенного от второй поверхности поршня. Направляющая содержит первую полость, идущую от входа на первой поверхности поршня до второй полости. Вторая полость идет от первой полости направляющей, причем площадь поперечного сечения первой полости меньше, чем площадь поперечного сечения второй полости. Направляющая дополнительно содержит шейку между первой полостью и второй полостью, причем площадь поперечного сечения шейки больше чем площадь поперечного сечения первой полости и меньше, чем площадь поперечного сечения второй полости.
В соответствии с еще одним аспектом настоящего изобретения, предлагается генератор волны сжатия, который дополнительно содержит держатель, который может быть прикреплен, с возможностью отсоединения, ко второму концу тяги управления. Держатель имеет первую ориентацию, позволяющую вставить держатель в направляющую, при этом держатель выполнен с возможностью перемещения во вторую ориентацию, когда он расположен в направляющей, причем, когда держатель находится во второй ориентации, он не может (ему запрещено) выходить из направляющей. Держатель имеет первую площадь поперечного сечения, когда он находится в первой ориентации, и вторую площадь поперечного сечения, когда он находится во второй ориентации. Направляющая имеет вход на первой поверхности поршня, имеющий площадь поперечного сечения входа. Первая площадь поперечного сечения держателя меньше, чем площадь поперечного сечения входа, а вторая площадь поперечного сечения держателя больше чем площадь поперечного сечения входа. Генератор волны сжатия дополнительно содержит фиксатор, позволяющий прикреплять второй конец тяги управления к держателю. Фиксатор может иметь стопорный штифт.
В соответствии с еще одним аспектом настоящего изобретения, предлагается генератор волны сжатия, который дополнительно содержит систему демпфирования, позволяющую тормозить тягу управления независимо от поршня. Система демпфирования содержит камеру, имеющую отверстие, причем указанная камера содержит флюид. Первый конец тяги управления содержит демпфирующий элемент, выполненный с возможностью входа в камеру через отверстие во время движения поршня к преобразователю, причем флюид в камере создает силу сопротивления, воздействующую на демпфирующий элемент, когда поршень движется к преобразователю. Демпфирующий элемент имеет площадь поперечного сечения меньше, чем площадь поперечного сечения отверстия в камере, так что флюид может вытекать из камеры, когда демпфирующий элемент движется внутри камеры. Система демпфирования дополнительно содержит одно или несколько отверстий, которые позволяют флюиду вытекать из камеры, когда демпфирующий элемент движется внутри камеры. Одно или несколько отверстий позволяют обеспечивать желательную величину силы сопротивления или торможения тяги управления.
В соответствии с еще одним аспектом настоящего изобретения, генератор движущей силы содержит первый генератор движущей силы, выполненный с возможностью приложения начальной движущей силы для перемещения поршня из положения покоя к преобразователю. Генератор движущей силы также содержит второй генератор движущей силы. Второй генератор движущей силы содержит камеру давления, соединенную с кожухом и содержащую флюид для приложения силы сжатия флюида к подвижному поршню, причем кожух содержит один или несколько каналов флюида, расположенных рядом с первым концом кожуха. Поршень выполнен так, чтобы блокировать (закрывать) каналы флюида, когда поршень расположен у первого конца кожуха, и открывать каналы флюида, чтобы создать связь флюида со вторым генератором движущей силы, когда поршень движется от первого конца кожуха к преобразователю, за счет движущей силы первого генератора движущей силы.
В соответствии с еще одним аспектом настоящего изобретения, преобразователь содержит конический участок, который может контактировать с участком кожуха, чтобы образовывать уплотнение, которое запрещает течение среды во внутренний канал кожуха.
В соответствии с еще одним аспектом настоящего изобретения, генератор волны сжатия дополнительно содержит систему обнаружения удара, расположенную у второго конца кожуха и выполненную так, чтобы обнаруживать соударение поршня с преобразователем. Система обнаружения удара содержит штырь, имеющий дистальный конец, смещенный к поверхности преобразователя, и датчик, позволяющий обнаруживать движение штыря.
В соответствии с еще одним аспектом настоящего изобретения, предлагается поршневая система. Поршневая система может быть использована с вариантами осуществления генератора волны сжатия. Поршневая система содержит поршень, имеющий первую поверхность и вторую поверхность и ось поршня, идущую от первой поверхности до второй поверхности. Поршень дополнительно содержит направляющую, идущую продольно вдоль оси поршня от первой поверхности по меньшей мере частично ко второй поверхности (от первой поверхности почти до второй поверхности). Поршневая система также содержит тягу, имеющий первый конец и второй конец. Второй конец тяги расположен в направляющей и приспособлен для перемещения в направляющей, при этом первый конец тяги остается снаружи от направляющей. Поршневая система также содержит держатель, приспособленный для удержания второго конца тяги в направляющей и для запрета перемещения (выпадения) второго конца тяги из направляющей.
В соответствии с еще одним аспектом настоящего изобретения, направляющая содержит первую полость, идущую от входа на первой поверхности поршня до второй полости, идущей от первой полости до внутреннего конца направляющей. Внутренний конец смещен от второй поверхности поршня, при этом площадь поперечного сечения первой полости меньше, чем площадь поперечного сечения второй полости
В соответствии с еще одним аспектом настоящего изобретения, держатель выполнен с возможностью прикрепления, с возможностью отсоединения, ко второму концу тяги. Держатель имеет первую ориентацию, позволяющую вставить держатель в направляющую, при этом держатель выполнен с возможностью перемещения во вторую ориентацию, когда он расположен в направляющей. Когда держатель находится во второй ориентации и прикреплен к тяге, он запрещает перемещение (выпадение) второго конца тяги из направляющей
В соответствии с еще одним аспектом настоящего изобретения, направляющая имеет вход на первой поверхности поршня, причем вход имеет площадь поперечного сечения входа. Держатель имеет первую площадь поперечного сечения, когда он находится в первой ориентации, и вторую площадь поперечного сечения, когда он находится во второй ориентации. Первая площадь поперечного сечения держателя меньше, чем площадь поперечного сечения входа, а вторая площадь поперечного сечения держателя больше чем площадь поперечного сечения входа. Поршневая система дополнительно содержит фиксатор, позволяющий фиксировать тягу и держатель во второй ориентации.
В соответствии с еще одним аспектом настоящего изобретения, генератор волны сжатия содержит преобразователь, выполненный с возможностью соединения со средой, и подвижный поршень, имеющий полость направляющей с внутренним концом внутри поршня. Тяга управления может идти между первым концом и вторым концом, причем второй конец находится и движется в полости направляющей в подвижном поршне. Второй конец тяги управления выполнен с возможностью удержания в полости направляющей во время движения поршня. Генератор волны сжатия может иметь генератор движущей силы, выполненный так, чтобы ускорять подвижный поршень в направлении к преобразователю.
При соударении поршня и преобразователя, второй конец тяги управления движется к внутреннему концу полости направляющей.
В соответствии с еще одним аспектом настоящего изобретения, второй конец тяги управления содержит ориентируемый держатель, причем держатель имеет первую ориентацию, которая позволяет вставлять держатель в полость направляющей, и вторую ориентацию, которая не позволяет держателю выходить (выпадать) из полости направляющей.
В соответствии с еще одним аспектом настоящего изобретения, генератор движущей силы содержит второй генератор движущей силы, который содержит первую полость для хранения флюида, чтобы прикладывать давление флюида к подвижному поршню, и вторую полость, которая по меньшей мере частично вакуумирована и служит для приема флюида из первой полости. Подвижный поршень выполнен с возможностью ускорения внутри второй полости в направлении к преобразователю, в ответ на давление веденного (во вторую полость) флюида.
Генератор движущей силы дополнительно содержит первый генератор движущей силы, выполненный так, чтобы прикладывать движущую силу для начала движения поршня из состояния покоя.
В соответствии с еще одним аспектом настоящего изобретения, генератор волны сжатия дополнительно содержит систему демпфирования, выполненную так, чтобы прикладывать демпфирующую силу для торможения тяги управления по меньшей мере на участке движения поршня к преобразователю. Система демпфирования может иметь полость, содержащую флюид, а тяга управления может иметь один или несколько демпфирующих элементов, выполненных так, что они могут входить в полость по меньшей мере во время части движения поршня. Сопротивление флюида, воздействующее на демпфирующие элементы в полости, может создавать демпфирующую силу.
Указанные ранее и другие аспекты и варианты осуществления изобретения будут более ясны из последующего детального описания, приведенного со ссылкой на сопроводительные чертежи, на которых аналогичные детали имеют одинаковые позиционные обозначения. Следует иметь в виду, что чертежи приведены для пояснению описанных здесь примерных вариантов осуществления изобретения, а не для ограничения объема патентных притязаний.
Краткое описание чертежей
На фиг.1 схематично показано поперечное сечение варианта осуществления генератора волны сжатия, имеющего подвижный поршень с направляющей (с направляющим пазом) и тягой управления, которая выполнена с возможностью скольжения внутри направляющей. Примерный генератор волны сжатия также содержит систему демпфирования тяги управления и систему пуска поршня.
На фиг.1А схематично показано поперечное сечение варианта осуществления направляющей поршня с держателем. На фиг.1А показана направляющая поршня до того, как держатель вставлен в направляющую поршня.
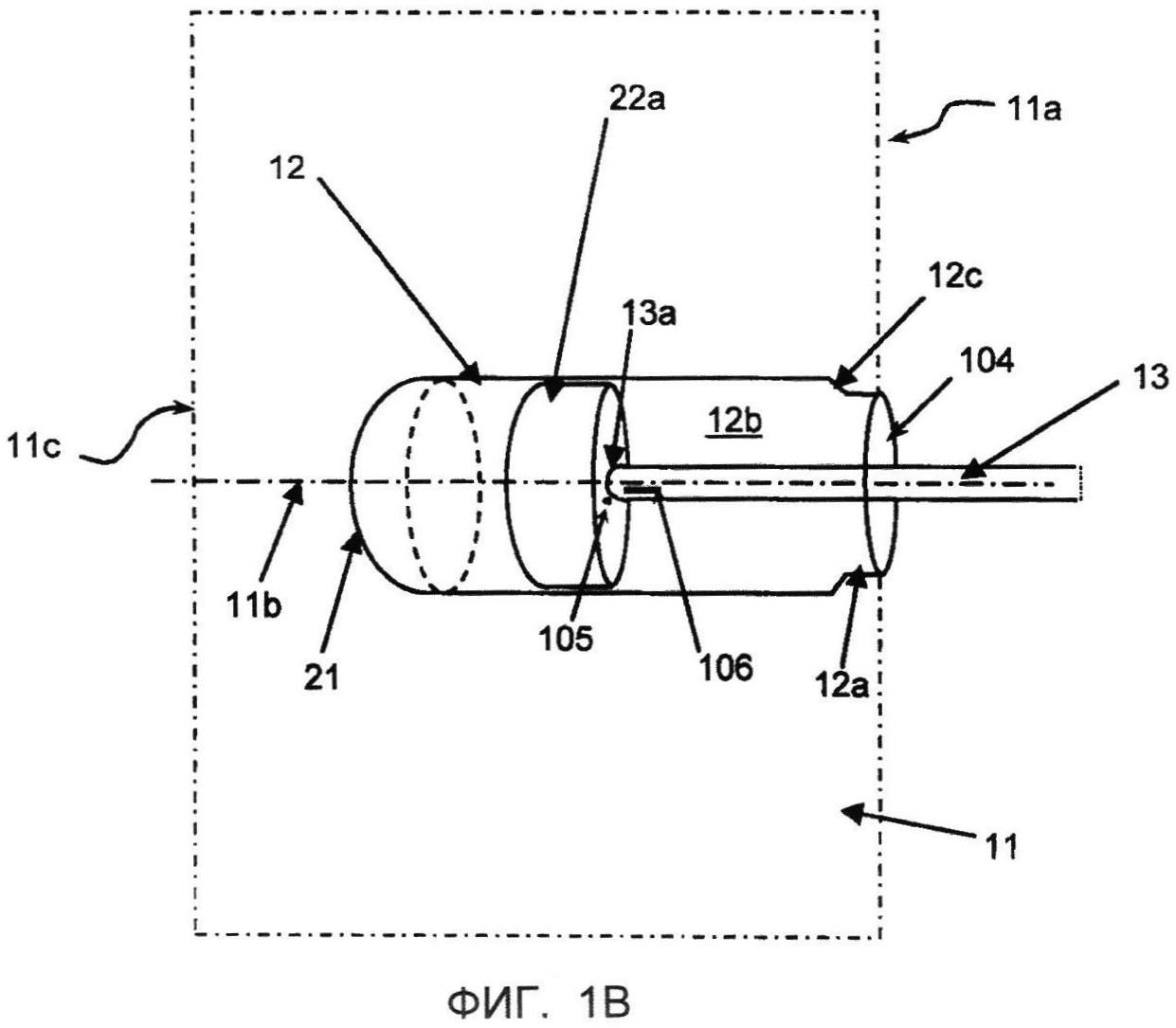
На фиг.1В схематично показано поперечное сечение варианта осуществления тяги управления, прикрепленной к держателю внутри направляющей поршня.
На фиг.2 схематично показано поперечное сечение варианта осуществления генератора волны сжатия с поршнем в его исходном положении.
На фиг.3 схематично показано поперечное сечение варианта осуществления генератора волны сжатия с поршнем, который переместился вперед (например, с удалением от исходного положения, показанного на фиг.2), где можно видеть открытые газовые каналы, которые могут создавать дополнительную движущую силу для поршня.
На фиг.4 схематично показано поперечное сечение варианта осуществления преобразователя.
Подробное описание изобретения
Обзор
Различные способы могут быть использованы для возбуждения волны сжатия в среде, такие как приложение прямого механического удара к поверхности среды, детонация, взрывы, электрические разряды, пучки интенсивной радиации, механизмы усиления колебаний и т.п.
Примеры генераторов волны сжатия описаны в патентной публикации США No.2010/0163130, которая полностью включена в данное описание в качестве ссылки. В этой публикации описаны примеры генераторов волны сжатия для возбуждения волны сжатия (или множества волн сжатия) в среде. Любой из примерных генераторов волны сжатия, компонентов генераторов или способов эксплуатации генераторов, описанных в этой публикации, может быть использован с описанными здесь вариантами осуществления устройств генерации волны сжатия и способов эксплуатации. Волна сжатия может быть использована для сжатия среды и повышения ее температуры, давления, энергии и/или плотности. Волна сжатия может быть возбуждена за счет механического удара ускоренного поршня в преобразователь, связанный со средой. Преобразователь позволяет по меньшей мере частично преобразовывать кинетическую энергию подвижного поршня в волну сжатия в среде. Для того, чтобы получать волны сжатия с высокой энергией, позволяющие сжимать материал внутри среды, в некоторых случаях требуется точная синхронизация и контроль положения поршня и момента удара.
В некоторых вариантах осуществления, контроль положения поршня и момента удара может быть обеспечен за счет приложения к поршню движущей силы и удерживающей силы и за счет текущего контроля положения поршня.
Одним из возможных способов управления синхронизацией удара является использование жесткой тяги, прикрепленной к поршню. Тяга имеет поверхность, к которой может быть приложена удерживающая сила, такая как созданная при помощи тормоза. Кроме того, тяга поршня может быть использована для текущего контроля положения поршня. В некоторых вариантах реализации, относительно резкое торможение поршня во время соударения с преобразователем может приводить к повреждению тяги, такому как коробление тяги, срезание ее точки крепления или повреждение в напряженном состоянии за счет отскока.
Таким образом, в соответствии с настоящим изобретением предлагаются варианты осуществления генераторов волны сжатия и поршней, которые позволяют снизить вероятность повреждения тяги управления во время соударения в некоторых вариантах реализации.
Примеры осуществления изобретения
На фиг.1 схематично показано поперечное сечение варианта осуществления генератора 10 волны сжатия. Генератор 10 волны сжатия содержит цилиндрический кожух 15, имеющий внутренний канал 15а, а также первый конец 16 и второй конец 17; поршень 11, выполненный с возможностью перемещения внутри внутреннего канала 15а кожуха; и преобразователь 14, расположенный у второго конца 17 кожуха. Второй конец 17 кожуха 15 может быть открытым концом, в который со скольжением может быть введен преобразователь 14. Первый конец 16 кожуха 15 может быть по меньшей мере частично закрыт.Внутренний канал 15а может идти продольно вдоль оси 15b канала. Поршень 11 может иметь продольную ось 11b поршня, идущую вдоль направления от первой поверхности 11а до второй поверхности 11с. Вторая поверхность 11 с обращена к преобразователю 14. Поршень 11 выполнен с возможностью перемещения во внутреннем канале 15а от первого конца 16 к преобразователю 14 у второго конца 17, вдоль оси 15b канала. Продольная ось 11b поршня главным образом коллинеарна с осью 15b канала, так что поршень 11 движется внутри внутреннего канала 15а вдоль направления, параллельного оси 11b поршня.
Внутренний канал 15а кожуха 15 может быть вакуумирован (откачен) при помощи насосной системы (не показана), так что он образует по меньшей мере частично область вакуума. В некоторых вариантах осуществления, внутренний канал может быть по меньшей мере частично вакуумирован (откачен) при помощи насосной системы, так что давление внутри внутреннего канала является пониженным относительно давления окружающей среды. Преобразователь 14 выполнен с возможностью перемещения по оси со скольжением относительно второго конца 17 кожуха при ударе поршнем 11. Преобразователь 14 содержит внутреннюю, ударную, поверхность 14а, обращенную во внутренний канал 15а кожуха, и внешнюю поверхность 14b, которая может быть связана со средой, такой как твердое тело, жидкость, газ или плазма. Преобразователь 14 дополнительно содержит механизм 18 удержания, который предотвращает выпадение преобразователя в среду, когда в него ударяет поршень 11 (см. также примерный преобразователь, показанный на фиг.4). Кожух 15 также может иметь множество флюидных каналов 19, образованных вокруг цилиндрического кожуха 15 рядом с его первым концом 16, через которые внутренний канал 15а поршня сообщается с камерой 20 давления. В камере 20 давления находится сжатый флюид (например, газ), который может протекать через каналы 19 и ускорять поршень 11 вдоль оси 15b внутреннего канала (или продольной оси 11b поршня) к преобразователю 14, так что вторая поверхность 11 с поршня соударяется с ударной поверхностью 14а преобразователя 14. Соударение поршня 11 и преобразователя 14 может приводить к перемещению преобразователя 14 вдоль оси 15b канала в среду, за счет чего возбуждается волна сжатия в среде.
В показанном варианте осуществления, поршень Ни преобразователь 14 являются главным образом цилиндрическими и плотно входят внутрь цилиндрического канала 15а. Однако это не является ограничением, и, в других вариантах осуществления, поршень 11 преобразователь 14 и/или канал 15а могут иметь другие формы (например, другие формы поперечного сечения, такие как многоугольные формы).
Поршень 11 может иметь направляющую (направляющий паз) 12, которая может быть выполнена так, что тяга 13 управления может быть по меньшей мере частично введена в направляющую 12. В показанном варианте осуществления, направляющая 12 содержит центральную, удлиненную полость, которая проходит частично через корпус поршня от первой поверхности 11а ко второй поверхности 11с. Направляющая 12 поршня принимает дистальный (или второй) конец 13а тяги 13 управления и позволяет тяге управления 13 двигаться или скользить в направляющей 12. Проксимальный (или первый) конец 13b тяги управления остается снаружи от направляющей 12. Направляющая 12 может идти на некоторую глубину (длину) внутрь корпуса поршня. В некоторых вариантах осуществления, направляющая 12 может проходить насквозь через весь корпус поршня 11 (например, до второй поверхности 11с). В других вариантах осуществления, направляющая 12 может идти на различную глубину внутрь корпуса поршня, но не на полную длину корпуса поршня. Длина направляющей 12 может быть выбрана так, чтобы обеспечивать достаточную траекторию для скольжения или движения тяги 13 во время соударения поршня 11 с преобразователем 14, без выпадения из направляющей 12 во время движения поршня 11 внутри внутреннего канала 15а.
В некоторых вариантах осуществления, поршень 11 может иметь главным образом цилиндрический корпус с диаметром около 300 мм, массой около 100 кг и длиной около 180 мм. Поршень 11 может быть изготовлен из твердого материала, такого как металл. Направляющей 12 может быть удлиненная полость, соосно расположенная внутри цилиндрического корпуса поршня, причем направляющая имеет диаметр отверстия около 50 мм и длину около 140 мм. Направляющая 12 может иметь цилиндрическое, коническое или другое поперечное сечение. В показанном варианте осуществления, направляющая 12 имеет внутренний конец 21, имеющий форму в виде части сферы (например, форму полусферы), чтобы уменьшить или минимизировать концентрацию напряжений на внутреннем конце 21 направляющей 12. Могут быть использованы и другие формы поперечного сечения направляющей, такие как многоугольная форма, причем внутренний конец (или другие участки направляющей) может иметь форму, отличающуюся от показанной на фиг.1 (например, может быть плоским, коническим и т.п.).
На фиг.1А схематично показано поперечное сечение варианта осуществления направляющей 12 поршня с держателем 22. На фиг.1А показана направляющая 12 поршня до того, как держатель 22 вставлен в направляющую 12 поршня. На фиг.1В схематично показано поперечное сечение варианта осуществления поршня 11 с дистальным концом 13а тяги управления 13, прикрепленным к держателю 22а внутри направляющей 12 поршня. В вариантах осуществления, схематично показанных на фиг.1А и 1В, направляющая 12 содержит вторую полость 12b рядом с первой полостью 12а. Внутренний конец 21 направляющей 12 расположен на дистальном конце второй полости 12b. Вторая полость 12b сужается у шейки 12 с для соединения с первой полостью 12а, которая имеет меньшую площадь поперечного сечения чем вторая полость 12b. Первая полость 12а имеет входное отверстие 104 на поверхности 11а поршня 11. В показанных вариантах осуществления, вход 104 имеет кольцевую форму, однако могут быть использованы и любые другие формы, подходящие для приема тяги 13 управления.
В одном варианте осуществления, вход 104 может иметь кольцевую форму с диаметром около 30 мм. Вторая полость 12b может иметь диаметр около 50 мм и длину около 120 мм, в то время как первая полость 12а может иметь диаметр около 30 мм и длину около 15 мм. Шейка 12 с может иметь изогнутую поверхность без острых кромок.
Как это показано на фиг.1А и 1В, генератор 10 волны сжатия может дополнительно содержать держатель 22, чтобы удерживать участок тяги 13 управления в направляющей 12. В одном варианте осуществления, держателем может быть фасонная гайка 22а, которая удерживает участок тяги 13 в направляющей 12, что позволяет участку тяги по существу свободно двигаться в направляющей, но не позволяет дистальному концу 13а тяги 13 выпасть из направляющей 12 и, таким образом, из поршня 11.
Варианты осуществления держателя 22 схематично показаны на фиг.1А и 1В. На фиг.1А, держатель 22 представляет собой фасонную гайку 22а, которая имеет полусферический корпус 101 с отверстием 103, в которое может быть вставлена и закреплена тяга 13 управления. Фасонная гайка 22а может иметь две удаленные (срезанные) с нее части, за счет чего образуются две противоположные плоские поверхности 102. Фасонная гайка 22а может иметь два различных поперечных сечения в зависимости от ориентации фасонной гайки 22а относительно направляющей 12 и входа 104. В первой ориентации (см., например, фиг.1А) фасонная гайка 22а обращена стороной с отверстием 103 к стенке направляющей 12, так что поперечное сечение фасонной гайки меньше, чем поперечное сечение первой полости 12а (и входного отверстия 104), так что гайка 22а может быть введена через входное отверстие 104 и в первую полость 12а (когда она находится в первой ориентации), а затем во вторую полость 12b. Когда фасонная гайка 22а находится внутри второй полости 12b, гайка 22а может быть повернута во вторую ориентацию, в которой отверстие 103 обращено ко входу 104 (см., например, фиг.1В), так что ее поперечное сечение будет больше чем поперечное сечение первой полости 12а и входного отверстия 104. Таким образом, когда фасонная гайка 22а находится во второй ориентации внутри второй полости 12b, гайка 22а не может выйти из направляющей 12 через входное отверстие 104.
На фиг.1А схематично показана ориентация держателя 22 относительно направляющей 12, до того, как фасонная гайка 22а была введена в направляющую 12 через вход 104.
Две противоположные плоские поверхности 102 помогают получить зазор, чтобы ввести фасонную гайку 22а через вход 104 в первую полость 12а и во вторую полость 12b. Как только гайка 22а будет находиться во второй полости 12b направляющей 12, гайка может быть повернута так, что отверстие 103 будет обращено ко входу 104, так что тяга управления может быть соединена с держателем 22. Фасонная гайка 22а может иметь такую конфигурацию, что форма дистального конца гайки по существу совпадает с формой внутреннего конца 21 направляющей (см. фиг.1В).
На фиг.1В схематично показаны фасонная гайка 22а и дистальный конец 13а тяги управления 13, прикрепленный к гайке 22а и вставленный внутрь направляющей 12 поршня. Когда гайка 22а находится в положении, показанном на фиг.1В, поперечное сечение гайки 22а немного меньше, чем поперечное сечение второй полости 12b, так что гайка 22а может двигаться относительно свободно внутри второй полости 12b. Однако поперечное сечение гайки 22а больше чем поперечное сечение первой полости 12а (и/или отверстия 104), так что гайка 22а не может выйти из направляющей 12 во время работы генератора волны сжатия. Для проведения операций технического обслуживания, гайка 22а может быть удалена из направляющей 12 за счет отделения тяги 13 управления от гайки 22а, и поворота гайки 22а так, что ее можно извлечь из полостей 12b, 12а через вход 104. В одном варианте осуществления, гайка 22а может быть повернута при помощи инструмента, предназначенного для поворота гайки 22а, что позволяет вводить или выводить гайку 22а через полости 12b, 12а и отверстие 104.
В некоторых вариантах осуществления, держатель 22 может дополнительно содержать фиксатор для закрепления тяги 13 управления и держателя 22 в фиксированном положении. Фиксатором может быть стопорный штифт (например, пломбировочная проволока) 106, введенный в узкий паз на тяге 13 управления (см., например, фиг.1В). Стопорный штифт 106 может быть выполнен с возможностью прохода через отверстие 105, образованное в держателе 22 поблизости от отверстия 103 фасонной гайки 22а (см., например, фиг.1А), так что когда тяга 13 управления прикреплена к держателю 22, стопорный штифт 106 может быть совмещен с отверстием 105. Стопорный штифт 106 может быть пропущен через отверстие 105, за счет чего тяга управления 13 будет закреплена в фиксированном положении относительно гайки 22а. Например, после того как держатель 22 будет закреплен (например, за счет резьбы) на втором конце 13а тяги, стопорный штифт 106 пропускают через отверстие 105, за счет чего происходит фиксация положения держателя 22 и тяги 13, что не позволяет держателю 22 отвинчиваться и отделяться от тяги 13. В некоторых вариантах осуществления могут быть использованы множество фиксаторов. В других вариантах осуществления могут быть использованы другие стопорные механизмы для закрепления, главным образом в фиксированном положении, тяги 13 управления и держателя 22.
В некоторых способах крепления, держатель 22 вводят в направляющую 12 поршня и затем поворачивают ориентировочно на 90 градусов, пока отверстие 103 не будет обращено к входному отверстию 104. Затем тягу 13 управления вставляют в отверстие 103 и прикрепляют ее к держателю 22 (например, за счет резьбы), и стопорный штифт 106 совмещают с отверстием 105 и вставляют в него, фиксируя положение тяги 13 управления и держателя 22. Когда тяга 13 фиксирована и прикреплена к держателю, тяга 13 (и держатель 22) может двигаться или скользить внутри второй полости 12b направляющей 12, но размер поперечного сечения держателя 22 не позволяет держателю 22 и дистальному концу 13а тяги 13 управления выпасть из направляющей 12 через первую полость 12а или отверстие 104. Таким образом, дистальный конец 13а тяги 13 управления может двигаться вдоль длины направляющей 12, но не может выпасть из направляющей 12.
При дополнительной ссылке на пример генератора волны сжатия, показанный на фиг.1, следует указать, что проксимальный конец 13b тяги 13 управления, противоположный дистальному концу 13а, который находится внутри направляющей 12 поршня, может быть соединен с диском 23, который действует как поршень, когда он движется внутри системы 24 демпфирования. В других вариантах осуществления, один или несколько демпфирующих элементов (таких как диски) могут быть расположены вдоль длины тяги 13 управления снаружи от направляющей 12 (в дополнение к диску 23 или вместо него), чтобы обеспечивать торможение тяги 13 в системе 24 демпфирования. Система 24 демпфирования может тормозить тягу 13 управления независимо от движения поршня 11 и за счет этого может уменьшить или минимизировать напряжения в тяге 13. Система 24 демпфирования может иметь пневматический демпфер (например, как это схематично показано на фиг.1), гидравлический демпфер и/или электромагнитный демпфер/ тормоз. Пневматический или гидравлический демпфер может быть снабжен настраиваемым клапаном 25, который может быть использован для регулировки торможения тяги управления, чтобы уменьшить или минимизировать напряжения в тяге 13. В некоторых вариантах осуществления, система 24 демпфирования может иметь цилиндрический корпус с входным отверстием, через которое диск 23 входит в систему демпфирования. В другом варианте осуществления, система 24 демпфирования может иметь коническую форму (см. фиг.1). Длина и/или площадь поперечного сечения системы 24 демпфирования может быть выбрана так (среди прочего, в зависимости от размера диска 23), чтобы обеспечивать желательное торможение тяги 13 управления или приложенную к ней демпфирующую силу.
В некоторых вариантах осуществления, система 24 демпфирования может иметь профиль, который изменяется вдоль длины системы 24 демпфирования. Например, система 24 демпфирования может иметь корпус с первым участком, который является по существу цилиндрическим, и второй участок, примыкающий к первому участку, имеющий форму колокола. Первый участок системы 24 демпфирования может иметь вход, изготовленный из эластомера, пластика или жесткой резины или из любого другого ударостойкого материала. Использование такого материала является предпочтительным, так как если диск сталкивается со входом системы 24 демпфирования, то вход должен подаваться без разрушения. Диск 23 может иметь такие размер и форму, что когда он находится у входа системы 24 демпфирования, создается зазор, через который газ может вытекать из системы демпфирования (например, из пневматической системы демпфирования). Например, диск 23 может иметь площадь поперечного сечения, которая немного меньше, чем площадь поперечного сечения входа системы 24 демпфирования. Система 24 демпфирования, в некоторых случаях, может дополнительно иметь по меньшей мере одно дополнительное отверстие, расположенное вдоль длины системы 24 демпфирования, через которое газ может выходить из системы 24 демпфирования. В одном варианте осуществления, различное число отверстий различного размера может быть образовано в разных местах в системе 24 демпфирования, позволяющих газу вытекать из демпфера 24, чтобы контролировать или уменьшать демпфирующую силу, позволяющую тормозить тягу 13 управления.
В одном примерном способе использования, в исходном положении поршня 11 поблизости от закрытого конца 16 канала, держатель 22 и тяга 13 управления находятся в их собственных исходных положениях. Держатель 22 и дистальный конец 13а тяги 13 управления могут быть смещены от внутреннего конца 21 направляющей 12. Поршень 11 может быть ускорен вперед для столкновения с преобразователем 14. При соударении поршня 11 и преобразователя 14, дистальный конец 13а тяги 13 управления, имеющий держатель 22, может двигаться вперед в направляющей 12, за счет чего уменьшается напряжение в тяге 13. Когда дистальный конец 13а тяги 13 управления движется вперед в направляющей 12, диск 23 движется вперед в системе 24 демпфирования.
В пневматической системе демпфирования, движение диска 23 сжимает газ (например, воздух) внутри системы 24 демпфирования и замедляет движение тяги 13 управления. Таким образом, система 24 демпфирования создает торможение тяги 13 и, таким образом, уменьшает или минимизирует напряжение в тяге.
В одном варианте осуществления, система 24 демпфирования может быть снабжена быстродействующим настраиваемым клапаном, таким как пьезоэлектрический настраиваемый клапан, который может быть использован как часть механизма 29 управления синхронизацией соударения. Быстродействующий настраиваемый клапан может быть использован для регулирования усилия, приложенного к тяге 13 до соударения с преобразователем, за счет чего изменяется скорость поршня на последнем участке его движения до столкновения с преобразователем 14 (например, на участке перемещения, когда диск 23 входит в систему 24 демпфирования).
После того, как поршень 11 возвращается в его исходное положение поблизости от конца 16 канала, тяга 13 управления может вернуться в ее исходное положение в направляющей 12, за счет приложения усилия к тяге 13, чтобы переместить ее назад в ее исходное положение, так что дистальный конец 13а тяги 13 и держателя 22 будут смещены от внутреннего конца 21 направляющей 12.
В некоторых вариантах осуществления, синхронизацией удара поршня 11 в преобразователь 14 можно управлять при помощи системы 29 управления. Система 29 управления может содержать один или несколько процессоров, контроллеров или вычислительных аппаратных средств общего или специального назначения. Генератор 10 волны сжатия может содержать тормоз 26 для приложения удерживающей силы к тяге 13 управления. Например, тормозом 26 может быть индукционный тормоз, фрикционный тормоз, пьезоэлектрический управляемый тормоз, и т.п. Тяга 13 управления может дополнительно иметь маркировку (метки) 27, так что система 29 управления может контролировать положение поршня за счет использования оптической системы, считывающей метки 27 тяги при помощи датчика 28 положения. Датчик 28 положения может посылать сигналы относительно положения поршня в систему 29 управления.
В различных вариантах осуществления, система 29 управления может управлять синхронизацией соударения между поршнем 11 и преобразователем 14 и/или может управлять скоростью и/или положением поршня 11 по меньшей мере на участке движения поршня внутри генератора 10. В одном варианте осуществления, система 29 управления может получать в виде ввода сигнал положения поршня от датчика 28 положения и может посылать выходные сигналы на тормоз 26 и/или клапан 30, который является частью системы 200 пуска поршня (см., например, фиг.2). Например, система 29 управления может получать управляющую информацию от одного или нескольких предыдущих пусков поршня 11 и может использовать такую управляющую информацию для ввода поправок в параметры управления для последующего пуска (пусков) поршня 11. Управляющей информацией может быть, например, траектория движения поршня, задержки в системе пуска, давление газа внутри генератора 10, измерения или определения трения внутри кожуха 15, положение поршня 11 относительно преобразователя 14 во время удара, и т.п. Система 29 управления может производить коррекцию, например, синхронизации пуска, давления газа, положения преобразователя/ поршня и т.п., чтобы регулировать силу удара и/или продолжительность удара. Система 29 управления может содержать или может иметь связь с одним или несколькими считываемыми компьютером носителями информации, которые могут быть использованы для хранения, постоянно или иным образом, управляющей информации. Например, система 29 управления может иметь физическое вычислительное устройство, которое имеет связь с энергозависимым или с энергонезависимым запоминающим устройством, в котором хранится управляющая информация.
Различные типы тормозных систем могут быть использованы для приложения удерживающей силы к тяге 13. В патентной публикации США No.2010/0163130, которая полностью включена в данное описание в качестве ссылки, описаны некоторые варианты осуществления тормозных систем, которые могут быть использованы совместно с вариантами осуществления генератора 10 волны сжатия. Например, тормозом 26 может быть пьезоуправляемый фрикционный тормоз, электромагнитный тормоз (например, с использованием вихревых токов), и т.п. В некоторых вариантах осуществления, тормоз 26 может быть предварительно нагружен желательной тормозной силой. В других вариантах осуществления, сила предварительного нагружения тормоза 26 может быть точно измерена и может контролироваться, например, при помощи тензодатчика (не показан). В одном варианте осуществления, тензодатчик может иметь пьезоэлектрический привод, который может быть соединен с тормозным башмаком и может иметь электрическую связь с формирователем напряжения. Пьезоэлектрический привод может быть механически соединен с предварительного нагруженным тормозом при помощи затяжного болта.
Когда пьезоэлектрический привод сдавливается или сжимается, тогда вырабатывается электрический ток (напряжение). Измерение напряжения, вырабатываемого приводом, позволяет определить силу предварительного нагружения тормоза. Точные измерения и контроль положения поршня
и тормозной силы позволяют точно управлять синхронизацией удара и/или силой удара при помощи системы 29 управления. В некоторых вариантах осуществления, система управления позволяет управлять синхронизацией удара с точностью около ±10 мкс.
В некоторых способах эксплуатации генератора 10 волны сжатия, поршень 11 несколько раз соударяется с преобразователем 14 при осуществлении последовательных ударов ("выстрелов"). Желательно производить калибровку синхронизации ударов, скорости (или кинетической энергии или количества движения) поршня, и т.п. В некоторых случаях, чтобы калибровать последовательные удары поршня 11 в преобразователь 14, следует точно определять момент, когда поршень 11 соударяется с преобразователем 14. Сила удара может передавать существенные нагрузки к одной или нескольким поверхностям поршня или кожуха поршня. Такие нагрузки могут быть использованы для определения синхронизации удара за счет измерения перемещения или ускорения. В некоторых случаях, на точность измерения может влиять вариабельность акустической траектории. Например, если датчик удара установлен на верхней части кожуха 15 поршня, а сила удара первоначально приложена к нижней части кожуха 15 поршня, то датчик удара на верхней части кожуха 15 не будет получать сигнал от удара до тех пор, пока сигнал давления не распространится через поршень 11 или кожух 15. В качестве пояснительного примера укажем, что в случае стального поршня с диаметром 300 мм, и если принять скорость звука в стали равной 5 км/с, задержка считывания датчиком на верхней части кожуха 15 составит около 60 мкс. Поэтому в некоторых вариантах осуществления генератора 10 волны сжатия используют датчик 31 обнаружения удара, который способен обнаруживать радиальное удлинение преобразователя 14 при ударе. Такой датчик 31 обнаружения удара может быть дополнительно использован как датчик положения, для контроля положения преобразователя при ударе поршня, и для поиска его исходного положения (положения до удара). В некоторых вариантах осуществления могут быть использованы множество датчиков 31 обнаружения удара.
Датчик 31 обнаружения удара может быть установлен на том участке кожуха 15, где расположен преобразователь 14, например, на таком участке, как седло 400 преобразователя (см., например, фиг.4), и может иметь связь с преобразователем 14. На фиг.1 схематично показано примерное место установки датчика 31 обнаружения удара на верхнем участке кожуха 15. Датчик 31 обнаружения удара может иметь штырь и акселерометр или любой другой датчик, позволяющий обнаруживать движение штыря. Штырь может быть предварительно нагружен для смещения к преобразователю 14 при помощи элемента смещения, такого как, например, пружина. В качестве элемента смещения могут быть использованы механические пружины, датчик перепада давления газа или газовые амортизаторы. Датчик 31 обнаружения удара может дополнительно иметь уплотнение, позволяющее герметизировать преобразователь 14 от атмосферы. В тех вариантах осуществления, в которых элементом смещения является датчик перепада давления газа, уплотнение может быть факультативным. Датчик 31 обнаружения удара может дополнительно иметь переключатель для индикации положения преобразователя 14 (например, когда преобразователь 14 возвращается в его исходное положение внутри седла 400). В некоторых вариантах осуществления, датчик обнаружения удара может иметь систему охлаждения, позволяющую исключить перегрев датчика 31 (акселерометра и/или переключателя положения).
Штырь в датчике 31 обнаружения удара может быть изготовлен из металла или любого другого материала, который имеет достаточно высокую скорость звука, может выдерживать результирующие напряжения и может передавать радиальное расширение преобразователя 14 на акселерометр. Штырь может идти к преобразователю 14, и дистальный конец штыря может касаться преобразователя 14, чтобы воспринимать волну сжатия, которая проходит через преобразователь 14 при ударе поршня 11. В других вариантах осуществления, датчик 31 обнаружения удара может иметь датчик, позволяющий обнаруживать радиальное расширение преобразователя. Датчик 31 обнаружения удара может иметь оптический или емкостной датчик, который может быть установлен непосредственно на поверхности преобразователя.
На фиг.2 схематично показано поперечное сечение варианта осуществления генератора 10 волны сжатия, который содержит камеру 20 давления, прикрепленную к кожуху 15 поршня. На фиг.2 поршень 11 показан в его исходном положении поблизости от первого конца 16 внутреннего канала 15а. Камера 20 давления может быть прикреплена к кожуху поршня на его первом конце 16 при помощи средства 202 крепления (например, при помощи болтов), причем флюид (например, газ) в камере 20 давления может иметь флюидную связь с внутренним каналом 15а поршня через каналы 19 (также см. фиг.1 и 3). Резервуар 203 сжатого газа и клапан 208 управления позволяют подавать сжатый газ в камеру 20 давления. Различные возможные способы пуска поршня 11 к преобразователю 14 описаны в патентной публикации США No.2010/0163130, которая полностью включена в данное описание в качестве ссылки.
В некоторых вариантах осуществления генератора 10 волны сжатия, время начала движения (пуска) поршня может быть точно измерено или может контролироваться для того, чтобы улучшить управление синхронизацией удара с преобразователем 14. В некоторых таких вариантах осуществления, рентабельный и легко управляемый способ создания движущей силы поршня может быть создан за счет использования сжатого газа. В одном примерном способе пуска и ускорения поршня 11 к преобразователю 14, в камере 20 давления создают исходное давление, в то время как поршень удерживается в неподвижном положении за счет приложения тормозной силы к тяге 13 управления (например, при помощи тормоза 26). При пуске, тормозная сила может быть быстро устранена (в течение нескольких микросекунд, когда используют пьезоэлектрический привод тормоза в некоторых вариантах осуществления), и сила сжатого газа может ускорять поршень 11 к преобразователю 14. В некоторых таких вариантах осуществления, привод при помощи сжатого газа может вызывать преждевременный пуск, если параметры тормоза выбраны неточно. Кроме того, в некоторых таких вариантах осуществления стремятся слегка затормозить движение поршня, так как увеличение объема позади поршня при пуске приводит к быстрому снижению давления, толкающего поршень.
Поэтому, в некоторых вариантах осуществления генератора 10 волны сжатия используют систему 200 пуска, которая содержит группы хронированных клапанов, таких как пневмоклапаны 30, которые могут быть использованы для непосредственного ввода газа высокого давления в относительно небольшой объем 36 позади поршня (см., например, фиг.1 и 2), чтобы подстроить начальную движущую силу, приложенную к поршню 11. Клапаны 30 могут иметь связь с независимо регулируемым источником 205 газа (например, сжатого воздуха). В других вариантах осуществления, источником 205 газа может быть первичный
источник газа (такой как резервуар 203 сжатого газа). В одном варианте осуществления, сжатый газ в камере 20 давления может быть использован для подачи газа высокого давления в объем 36. Независимый источник 205 газа может быть подстроен для каждого пневмоклапана 30, чтобы добиться синхронизации момента открытия с точностью менее десятых долей микросекунды в некоторых вариантах осуществления. Пневмоклапаны 30 могут подавать сжатый газ через каналы 210 в малый объем 36 позади поршня. Как это схематично показано на фиг.1 и 2, объемом 36 может быть относительно небольшой зазор, образованный между задней поверхностью Па поршня и первым концом 16 кожуха. В одном способе эксплуатации, давление газа для первоначального пуска может быть введено в объем 36, в то время как поршень удерживается в неподвижном положении за счет приложения тормозной силы к тяге управления (не показано на фиг.2). При пуске, сила торможения может быть снята и сжатый газ в объеме 36 может прикладывать начальную движущую силу, чтобы начать движение поршня 11. Сжатый газ объема 36 прикладывает начальную движущую силу к поршню 11, чтобы он прошел мимо комплекта газовых каналов 19 (см., например, фиг.3), через которые дополнительный сжатый газ, хранящийся в камере 20 давления, может быть приложен к поршню 11, чтобы ускорять его к преобразователю 14. В таких вариантах осуществления, поршень 11 действует как клапан для газовых каналов 19, чтобы открывать камеру 20 давления и прикладывать дополнительную движущую силу к задней части поршня 11, после того, как поршень 11 прошел мимо газовых каналов 19.
Например, система 200 пуска может иметь четыре клапана 30, которые вводят газ под давлением около 100 psi (1 psi = 1 фунт на квадратный дюйм ~6,895 Па) в объем 36, чтобы начать движение поршня 11 вперед по каналу поршня со скоростью около 2 м/с. Как только поршень 11 проходит мимо газовых каналов 19, сильно сжатый газ с давлением около 350 psi или выше из камеры 20 давления входит в объем позади поршня 11 и ускоряет поршень со скоростью ориентировочно от 30 до 100 м/с.
В одном варианте осуществления, система 200 пуска может содержать больше или меньше клапанов 30, чтобы приложить начальную движущую силу к поршню 11. В другом варианте осуществления, клапаны 30 могут быть соединены с независимыми контроллерами 209 моментов открытия или закрытия клапанов, которые регулируют количество газа, которое каждый клапан 30 вводит в объем позади поршня 11. Введенный сжатый газ прикладывает движущую силу к поршню 11, достаточную для того, чтобы он двигался вперед в цилиндрическом канале и проходил мимо газовых каналов 19, как это показано на фиг.3.
В других вариантах осуществления могут быть использованы другие типы клапанов или механизмов пуска, с другими давлениями, которые могут быть приложены для создания начальной движущей силы, приложенной к поршню 11.
В иных других вариантах осуществления может быть предусмотрено управление пуском с использованием пьезоэлектрических элементов прямого действия, пружинных механизмов, механизмов с использованием силы инерции (например, маховиков или других аналогичных устройств), или тепловых механизмов.
В некоторых способах эксплуатации, когда генератор 10 волны сжатия находится в исходном положении, поршень 11 может находиться в положении, схематично показанном на фиг.1 и 2, в котором поршень 11 закрывает газовые каналы 19. Таким образом, в исходном положении поршень 11 не позволяет газу поступать во внутренний канал кожуха 15 через газовые каналы 19. Система 29 управления может посылать сигнал на тормоз 26, чтобы прикладывать тормозную силу к тяге 13 управления. Система 29 управления может посылать сигнал на контроллеры 209 клапанов, чтобы клапаны 30 открылись. В желательный момент времени, система 29 управления подает сигнал на тормоз 26, чтобы снизить (или полностью снять) тормозную силу. Поршень 11 при этом начинает движение и проходит мимо газовых каналов 19, открывая их, как это показано на фиг.3, что позволяет сжатому газу, хранящемуся в камере 20 давления, проходить через газовые каналы 19 и ускорять поршень 11 к преобразователю 14. Когда поршень 11 соударяется с преобразователем 14, он передает по меньшей мере часть своей кинетической энергии преобразователю. При ударе, преобразователь может быть упруго сжат и может смещаться по оси по меньшей мере частично в среду, за счет чего происходит по меньшей мере частичное преобразование кинетической энергии поршня в волну сжатия в среде. При ударе поршня 11, дистальный конец тяги 13 управления (и/или держатель 22) может двигаться или скользить вперед в направляющей 12, что позволяет понизить напряжение в тяге, возникающее во время удара. Система 24 демпфирования может тормозить тягу 13 управления независимо от поршня 11 и может снижать или минимизировать напряжение в тяге.
Распространение волны напряжения от твердых компонентов (например, от поршня 11 и преобразователя 14) в среду может создавать волну сжатия в среде. Когда такие волны напряжения связаны с большими скоростями удара поршня в преобразователь (например, со скоростями ориентировочно больше чем 10 м/с в некоторых случаях), такие волны могут вызывать локальные давления, которые могут превышать 1 ГПа в некоторых вариантах осуществления генератора 10. Такие давления могут быть вызваны движением преобразователя 14 в среду, а также радиальным расширением преобразователя, когда волна сжатия проходит через преобразователь. Радиальное расширение может вызывать выброс порций среды, которые расположены по бокам преобразователя, в виде "струи." Такая "струя" может повреждать уплотнения, использованные в генераторе 10 поблизости от преобразователя 14. Кроме того, уплотнения могут деградировать под высокими давлениями, возникающими в некоторых вариантах осуществления.
На фиг.4 показано поперечное сечение варианта осуществления преобразователя 14, форма которого выбрана так, что он может действовать как первичное уплотнение для конца 17 внутреннего канала 15 кожуха генератора 10 волны сжатия. Преобразователь 14 содержит поверхность 401, которая обращена к поверхности 402, которая является частью опорной стенки (седла) 400 преобразователя в кожухе 15. Поверхность 401 преобразователя 14 содержит угловую поверхность (имеющую один или несколько угловых участков) или закругленную или изогнутую поверхность. Поверхность 402 опорной стенки 400 может иметь соответствующую коническую плоскую поверхность или закругленную или изогнутую поверхность. Поверхность 401 преобразователя 14 может быть выполнена так, чтобы сопрягаться с поверхностью 402 опорной стенки. В одном варианте осуществления, поверхность 402 может быть частью стенки кожуха поршня. Конфигурация поверхности 401 и поверхности 402 позволяет создавать первичное уплотнение, которое, при эксплуатации некоторых вариантов осуществления генератора, позволяет выталкивать по меньшей мере порцию среды, которая может быть захвачена в пространстве между преобразователем 14 и его седлом (опорной стенкой) 400. Порция среды может быть вытолкнута тогда, когда преобразователь возвращается в его исходное положение в седле 400 после соударения с поршнем.
В другом варианте осуществления, дополнительно может быть использовано вторичное уплотнение 403. Вторичное уплотнение может быть образовано из материала, который позволяет выдерживать воздействие среды, высокой температуры, высокого давления и фрикционных сил, вызванных небольшим перемещением преобразователя 14. В одном варианте осуществления, уплотнение 403 может дополнительно действовать как лубрикатор. Возможное преимущество вариантов осуществления с использованием как первичного, так и вторичного уплотнений, состоит в том, что первичное уплотнение позволяет ограничивать воздействие давления на вторичное уплотнение, так что вторичное уплотнение испытывает воздействие меньшего давления по сравнению с вариантами осуществления, в которых не используют первичное уплотнение. Поэтому более широкий диапазон уплотняющих материалов может быть использован во вторичном уплотнении, так как уплотняющий материал подвергается воздействию более низких давлений в таких вариантах осуществления. Например, вторичным уплотнением 403 может быть гибкое графитовое уплотнение, такое как, например, уплотнение GRAFOIL®, или образованное в штампе кольцо из материала GRAFOIL®, которое может быть закуплено на фирме EGC Enterprises Inc. (Chardon, Ohio).
Кроме того, в некоторых таких вариантах осуществления, преобразователь 14 может иметь первичное уплотнение металл-металл, образованное внешней поверхностью 401 преобразователя на поверхности 402 седла 400, и вторичное, кольцевое уплотнение 403. В некоторых таких вариантах осуществления могут быть обеспечены несколько функций, в том числе, например: создание первичного уплотнения между двумя по существу жесткими компонентами (например, между металлическим преобразователем и его металлическим седлом), так что полученная геометрия уплотнения обеспечивает желательное уплотнение при повышенном давлении. Кроме того, давление среды на преобразователь может возбуждать уплотнение, что может повышать стабильность уплотнения при повышении давления.
Варианты осуществления преобразователя 14, показанные на фиг.4, также позволяют создавать расширяющийся объем по бокам преобразователя 14, когда он движется вперед (например, после удара поршня 11), что может замедлять проникновение среды вдоль боковых сторон преобразователя. В одном варианте осуществления может быть предусмотрена дренажная система (не показана), чтобы удалять любую среду, которая проникла через первичное уплотнение (например, через уплотнение металл-металл, образованное поверхностями 401 и 402) и/или через вторичное уплотнение 403. Дренажная система может дополнительно содержать датчик, индицирующий наличие любой среды в дренажной системе и, таким образом, наличие утечки первичного и/или вторичного уплотнений. Конфигурация, схематично показанная на фиг.4, также может иметь один или несколько поворотов или углов в траектории движения среды до вторичного уплотнения 403, что позволяет подавить образование струи в среде.
Преобразователь 14 может быть закреплен внутри седла 400 преобразователя при помощи механизма 18 удержания, который предотвращает выпадение преобразователя в среду, когда в него ударяет поршень 11. Механизм 18 удержания может иметь стопорное кольцо, соединенное с корпусом преобразователя, как это показано на фиг.4. Внешняя кромка стопорного кольца может быть расположена в цилиндрической канавке, образованной в седле 400. Когда преобразователь 14 вставляют внутрь седла 400, внешняя кромка стопорного кольца входит в канавку 18а, что предотвращает выпадение преобразователя из седла 400 после удара поршнем. В некоторых вариантах осуществления, стопорное кольцо может быть расположено внутри поднутрения, образованного во внешнем диаметре преобразователя. В одном варианте осуществления используют стопорное кольцо с разрезом, имеющее по меньшей мере два сегмента, которые могут быть использованы как компоненты механизма 18 удержания. Кроме того, одно или несколько уплотнений и/или вкладышей могут быть предусмотрены в механизме 18 удержания чтобы закрепить преобразователь 14 внутри седла 400.
Так как преобразователь 14 и среда типично содержат различные материалы (или различные фазы одного материала, например, твердое тело и жидкость), то может происходить рассогласование акустического импеданса на поверхности 14b преобразователя, обращенной к среде. Рассогласование импеданса может вызывать отражение акустической энергии назад к ударной поверхности 11 с поршня, что может вызывать по меньшей мере частичный отскок преобразователя 14 от среды.
Варианты осуществления преобразователя 14 позволяют обеспечивать улучшенное согласование акустического импеданса со средой. Например, вариант осуществления преобразователя 14, схематично показанный на фиг.4 содержит конический конец 405, что создает увеличенную площадь взаимодействия со средой и может повышать эффективность передачи волны сжатия и снижать отражение акустической энергии. Вариант осуществления, показанный на фиг.4, также содержит различные твердые поверхности 401, 402, 400 и 18, относительно которых преобразователь 14 может быть расположен, чтобы точно управлять синхронизацией во время работы генератора 10 волны сжатия.
Дополнительные варианты осуществления преобразователя, которые могут быть использованы с раскрытыми здесь генераторами 10 волны сжатия, описаны в патентной публикации США No.2010/0163130, которая полностью включена в данное описание в качестве ссылки. Могут быть использованы различные изгибы поверхности 401 или 402. Кроме того, широкий диапазон материалов может быть использован для изготовления преобразователя и/или седла преобразователя. Например, любая ковкая сталь с достаточной прочностью, позволяющая выдерживать удары, может быть использована для изготовления преобразователя 14 и поршня 11.
Примеры использования генераторов волны сжатия
Варианты осуществления генератора волны сжатия могут быть использованы для передачи волны сжатия в любую подходящую среду (например, в твердое тело, жидкость, газ и/или плазму). В некоторых вариантах осуществления, генератор волны сжатия может быть использован как пресс для штамповки, выдавливания, гибки, отбортовывания, ковки, вырубки, пробивки или другой обработки материалов, таких как, например, металлы (например, для обработки металлов). В некоторых вариантах осуществления, среда содержит жидкость, газ или смесь жидкости и газа. В некоторых таких вариантах осуществления, среда содержит жидкий металл, такой как жидкий свинец или смесь жидкого свинца и лития. Генератор волны сжатия может быть использован для генерирования волны сжатия в среде, которая может повышать давление, температуру, энергию и/или плотность среды, и позволяет повышать скорость химических реакций в среде. Например, варианты осуществления генератора волны сжатия могут быть использованы для управления поршнем в газовом двигателе (например, в паровом двигателе).
Раскрытые здесь варианты осуществления генератора волны сжатия могут быть использованы для генерации других форм энергии, что может быть результатом концентрации акустической энергии. Такие формы энергии могут быть использованы для генерации локализованных горячих пятен, ультрафиолетового (УФ) излучения, рентгеновских лучей, медицинских изотопов, нейтронов, для возбуждения ядерного синтеза, а также для получения некоторых побочных продуктов такого преобразования и концентрации акустической энергии. Например, некоторые варианты осуществления генератора волны сжатия могут быть использованы для повышения давления в камере ядерного реактора, содержащей среду (такую как жидкий свинец или жидкая смесь свинца с литием), так что скорости ядерной реакции повышаются достаточно для того, чтобы вызвать генерацию нейтронов или реакции ядерного синтеза.
Несмотря на то, что были описаны и показаны на чертежах специфические элементы, варианты осуществления и применения настоящего изобретения, следует иметь в виду, что объем патентных притязаний настоящего изобретения не ограничен этим, так что различные модификации могут быть сделаны не выходя за рамки настоящего изобретения, особенно в свете приведенных здесь выше разъяснений. Так, например, в любом раскрытом здесь способе или процессе, действия или операции, образующие способ/ процесс, могут быть осуществлены в любой подходящей последовательности и не обязательно ограничены какой-либо раскрытой здесь последовательностью. Элементы и компоненты могут быть сконфигурированы или расположены иным образом, а также могут быть объединены и/или исключены в различных вариантах осуществления. Различные описанные здесь выше характеристики и процессы могут быть использованы независимо друг от друга, или могут быть объединены различным образом. Все такие возможные комбинации и субкомбинации подпадают под действие настоящего изобретения. Приведенные в описании изобретения ссылки на "некоторые варианты осуществления," "вариант осуществления," и т.п., означают, что специфическая характеристика, структура, операция, способ или признак, описанные в сочетании с вариантом осуществления, включены по меньшей мере в один вариант осуществления. Таким образом, фразы "в некоторых вариантах осуществления," "в варианте осуществления," и т.п., встречающиеся в описании изобретения, не обязательно относятся к одному и тому же варианту осуществления и могут относится к нескольким одинаковым или различным вариантам осуществления. В самом деле, раскрытые здесь новые способы и системы могут быть реализованы в различных формах. Более того, различные исключения, добавления, замены, эквиваленты, перегруппировки и изменения формы описанных здесь вариантов осуществления могут быть сделаны не выходя за рамки настоящего изобретения.
Различные аспекты и преимущества вариантов осуществления были описаны там, где это было нужно. Следует иметь в виду, что не обязательно все такие аспекты или преимущества могут быть достигнуты в любом специфическом варианте осуществления.
Таким образом, например, следует иметь в виду, что различные варианты могут быть реализованы так, чтобы обеспечить или оптимизировать одно преимущество или группу преимуществ, без необходимости обеспечения других аспектов или преимуществ, которые предусмотрены в соответствии с настоящим изобретением или подсказываются им.
Использованные здесь условные (сослагательные) предложения, которые содержат, среди прочего, такие слова как "может," "например" и т.п., если специально не указано иное или если из контекста прямо не следует иное, необходимо понимать так, что некоторые варианты осуществления содержат, а другие варианты осуществления не содержат некоторые признаки, элементы и/или операции. Таким образом, такие
условные предложения не обязательно означают, что признаки, элементы и/или операции обязательно требуются в одном или нескольких вариантах осуществления, или что один или несколько вариантов осуществления содержат логику для принятия решения, при участии оператора или без него, относительно ввода этих признаков, элементов и/или операций в какой-либо специфический вариант осуществления или их реализации в нем. Ни одна единственная характеристика или группа характеристик не требуется или не является необходимой для любого специфического варианта осуществления. Термины "содержит," "включает в себя" и т.п., являются синонимами и их используют в открытом смысле, не исключающем использования дополнительных элементов, признаков, актов, операций и т.п. Термин "или" также используют в открытом, а не в закрытом смысле, так что когда этот термин используют, например, для соединения в списке элементов, то он означает один элемент, некоторые элементы или все элементы в списке.
Конъюнктивные фразы, такие как "по меньшей мере один из X, Y и Z," если специально не указано иное или если из контекста прямо не следует иное, необходимо понимать как любой из X, Y или Z. Таким образом, эти конъюнктивные фразы не следует понимать в расширительном смысле, в соответствии с которым некоторые варианты осуществления требуют наличия в каждом из них по меньшей мере одного X, по меньшей мереодного Y и по меньшей мере одного Z.
Примерные вычисления, расчеты, результаты, графики, значения и параметры, приведенные в описанных здесь вариантах осуществления, даны для пояснения раскрытых вариантов осуществления, а не для их ограничения. Другие варианты осуществления могут быть сконфигурированы иначе и/или могут работать иным образом, чем описанные здесь примерные варианты осуществления. В самом деле, описанные здесь новые способы и устройства могут быть реализованы в различных других формах. Более того, различные исключения, замены и изменения в форме описанных здесь способов и систем могут быть сделаны не выходя за рамки настоящего изобретения и в соответствии с его сущностью.
Реферат
Изобретение относится к генератору волны сжатия среды и поршневой системы генератора и может быть использовано для инициирования химических или физических реакций в среде в камере, повышения температуры, давления энергии или плотности среды. Генератор волны сжатия содержит подвижный поршень с направляющей, внутри которой может двигаться или скользить тяга управления поршня и преобразователь, связанный со средой. Во время соударения поршня с преобразователем, тяга управления скользит в направляющей, что позволяет снизить напряжение в тяге. Генератор содержит демпфер, чтобы тормозить тягу управления, независимо от поршня. Соударение поршня с преобразователем передает часть кинетической энергии поршня в среду, за счет чего в среде создаются волны сжатия. Система привода поршня может быть использована для создания точного и управляемого перемещения поршня. 2 н. и 16 з.п. ф-лы, 4 ил.
Формула
подвижный поршень, имеющий первую поверхность и вторую поверхность и продольную ось между первой поверхностью и второй поверхностью, причем поршень содержит направляющую, проходящую вдоль продольной оси поршня от первой поверхности по меньшей мере частично ко второй поверхности;
кожух, имеющий внутренний канал, первый конец и второй конец, причем поршень по меньшей мере частично расположен внутри внутреннего канала кожуха, при этом поршень выполнен с возможностью перемещения внутри внутреннего канала кожуха от первого конца ко второму концу, в направлении, параллельном продольной оси поршня;
тягу управления, проходящую продольно от первого конца до второго конца, причем второй конец тяги управления выполнен так, что он может быть вставлен в направляющую и может перемещаться в направляющей;
держатель, приспособленный для удержания второго конца тяги управления в направляющей для предотвращения перемещения второго конца тяги управления из направляющей во время перемещения поршня внутри внутреннего канала;
преобразователь, со скольжением установленный во втором конце кожуха, причем преобразователь выполнен с возможностью соединения со средой и приспособлен для преобразования части кинетической энергии поршня в волну сжатия в среде, при соударении поршня с преобразователем; и
генератор движущей силы, позволяющий прикладывать движущую силу к подвижному поршню для его запуска и ускорять подвижный поршень к преобразователю,
причем, при соударении поршня и преобразователя, второй конец тяги управления перемещается в направляющей ко второй поверхности поршня.
держатель прикреплен, с возможностью отсоединения, ко второму концу тяги управления
и имеет корпус с отверстием для крепления ко второму концу тяги управления, причем держатель выполнен с возможностью второй ориентации внутри направляющей таким образом, что отверстие корпуса обращено ко входному отверстию направляющей, при этом корпус во второй ориентации имеет поперечный размер, соответствующий поперечному размеру направляющей, и больший ,чем входное отверстие, при этом позволяет держателю перемещаться в продольном направлении вдоль оси поршня без перемещения в поперечном направлении поперек оси поршня, и предотвращать выход держателя из направляющей, когда держатель находится в направляющей во второй ориентации, при этом корпус имеет продольный размер, который перпендикулярен поперечному размеру корпуса, и который меньше входного отверстия так, что держатель может быть удален из направляющей, находясь в первой ориентации, которая перпендикулярна второй ориентации, когда второй конец тяги управления не соединен с входным отверстием корпуса держателя.
камеру, имеющую отверстие, причем указанная камера содержит флюид;
первый конец тяги управления, который содержит демпфирующий элемент, выполненный с возможностью входа в камеру через отверстие во время движения поршня к преобразователю, причем флюид в камере создает силу сопротивления, воздействующую на демпфирующий элемент, когда поршень движется к преобразователю;
при этом одно или несколько отверстий позволяют флюиду вытекать из камеры, когда демпфирующий элемент движется внутри камеры.
камеру давления, соединенную с кожухом и содержащую флюид для приложения силы сжатия флюида к подвижному поршню,
причем кожух содержит один или несколько каналов флюида, расположенных рядом с первым концом кожуха,
при этом поршень выполнен так, чтобы блокировать каналы флюида, когда поршень расположен у первого конца кожуха, и открывать каналы флюида, чтобы создать связь флюида с камерой давления, когда поршень движется от первого конца кожуха к преобразователю, за счет движущей силы первого генератора движущей силы.
поршень, имеющий первую поверхность и вторую поверхность и ось поршня, проходящую от первой поверхности до второй поверхности, причем поршень содержит направляющую, проходящую продольно вдоль оси поршня от первой поверхности по меньшей мере частично ко второй поверхности,
тягу, имеющий первый конец и второй конец, причем второй конец тяги расположен в направляющей и приспособлен для перемещения в направляющей, при этом первый конец тяги остается снаружи от направляющей, и держатель, приспособленный для удержания второго конца тяги в направляющей и для запрета перемещения второго конца тяги из направляющей.
Документы, цитированные в отчёте о поиске
Устройство для генерирования акустических импульсов в жидкой среде
Комментарии