Сканерная система загрузочного устройства - RU2435661C2
Код документа: RU2435661C2
Чертежи











Описание
Настоящая заявка притязает на приоритет на основании предварительной заявки «U.S. divisional Patent Application Serial №60/841178», имеющей дату подачи 30 августа 2006, озаглавленную «Сканерная система загрузочного устройства». Настоящая заявка дополнительно к притязанию на приоритет включает в себя вышеуказанную предварительную заявку для справки для всех целей во всей ее полноте.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение касается устройства и способов для анализа геометрии и других характеристик кряжевого блока в трех измерениях и, более конкретно, для создания множества точек сканирования для сбора в системе измерения, используемой для вычисления оси оптимальной обработки («yield axis») кряжевого блока.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Компания «Сое Manufacturing Company», правопреемник настоящего изобретения, продает оборудование, относящееся к лесной промышленности и, в частности, к машинам и оборудованию, которое производит листы шпона из кряжей деревьев. Обычно кряжи помещают в загрузочное устройство лущильного станка, и требуется наиболее точно вычислить ось оптимальной обработки кряжа при лущении. Существующая в настоящее время практика в промышленности заключается в получении измерений, выполненных по периферии кряжа или кряжевого блока в многочисленных стационарных местах, расположенных вдоль длины кряжа. Измерения используются для получения только приблизительного центра кряжа как в загрузочном устройстве станка, так и в лущильном станке до проведения операции лущения.
Кряжи, блоки или кряжевые блоки, как их часто называют, при подаче в лущильный станок могут превышать 40 дюймов в диаметре и могут быть более 106 дюймов в длину. Когда блок находятся в станке, он вращается с большой скоростью и входит в контакт по всей своей длине с ножом станка, который снимает шпон, в идеале в виде цельных листов.
Листы обычно имеют толщину 0,015-0,25 дюймов, и кряж обычно вращается до тех пор, пока диаметр блока не станет меньше 6 дюймов. Трещины в листах шпона наиболее часто возникают тогда, когда шпиндели, вращающие блок, расположены не вдоль оси оптимальной обработки. Такие трещины равнозначны отходам, приводящим к нежелательным затратам и расходам. Существенные исследования и разработки были направлены на совершенствование оборудования и способов для извлечения шпона из кряжевых блоков. Правопреемник настоящего изобретения имеет несколько патентов, включающих в себя такие совершенствования. Такие патенты включают в себя «United States Patent №6116306», выданный 12 сентября 2000, и №4884605, выданный 5 декабря 1989, которые описывают бесконтактное сканирование с использованием техники триангуляционного измерения и множества одноточечных лазерных сканеров для определения диаметра поперечных сечений кряжевого блока. Как патент US 6116306, так и патент US 4884605 включены в настоящий документ для справки для всех целей и прилагаются к настоящему документу в приложении А.
В настоящее время обычной практикой для типового восьмифутового станка является использование от 5 до 32 независимых одноточечных сканеров. Установка, выравнивание, очистка и технический уход за таким большим количеством независимых сканеров являются дорогими и неэффективными. Хотя технологии, описанные в вышеуказанных патентах для бесконтактного сканирования приблизительной центральной оси, в основном являются эффективными, их недостаток заключается в невозможности вычисления оси оптимальной обработки. Таким образом, как описано в вышеуказанных патентах, при использовании способов современной практики в промышленности не достигается максимальная выработка. Менее точное вычисление оси оптимальной обработки кряжа создает потери, приводящие к повышению стоимости всего продукта.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение представляет собой новый и улучшенный способ и устройство для сканирования и анализа профиля кряжевого блока для определения оси оптимальной обработки с помощью использования серии устройств сканирования профиля блока. Согласно одному приведенному для примера варианту осуществления используются четыре устройства сканирования профиля блока. Каждое устройство сканирования профиля блока способно измерять 512 расстояний, полученных в результате сканирования.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеприведенные и другие отличительные признаки настоящего изобретения будут понятны специалистам в данной области техники, к которой относится настоящее изобретение, при рассмотрении последующего описания изобретения со ссылкой на сопроводительные чертежи, на которых:
Фиг.1А - изометрическая проекция устройства, используемого в предшествующем уровне техники;
Фиг.1 - вертикальная проекция загрузочного устройства и устройств сканирования, когда кряжевый блок находится в первом или в исходном положении для процесса предварительного сканирования;
Фиг.2 - боковая проекция Фиг.1 и лущильного станка;
Фиг.3А - изометрическая проекция, показывающая работу устройства сканирования профиля блока в одном взятом для примера варианте осуществления;
Фиг.3В - схематическая проекция одного взятого для примера варианта осуществления устройства сканирования профиля блока;
Фиг.4 - вертикальная проекция загрузочного устройства и устройств сканирования, когда кряжевый блок находится во втором положении или в положении сканирования обработки;
Фиг.5 - частичная перспективная проекция Фиг.4;
Фиг.6 - линейная проекция периферии блока при повороте на 360°, как показано на Фиг.5;
Фиг.7 - частичная вертикальная проекция загрузочного устройства, в котором блок располагается таким образом, что для вычисления оси оптимальной обработки используются устройства сканирования;
Фиг.8 - увеличенная проекция блока, подверженного перекрыванию зон устройства сканирования, в условиях затенения в профиле блока;
Фиг.9 - блок-схема представляющего логический процесс анализа условия затенения в профиле кряжевого блока; и
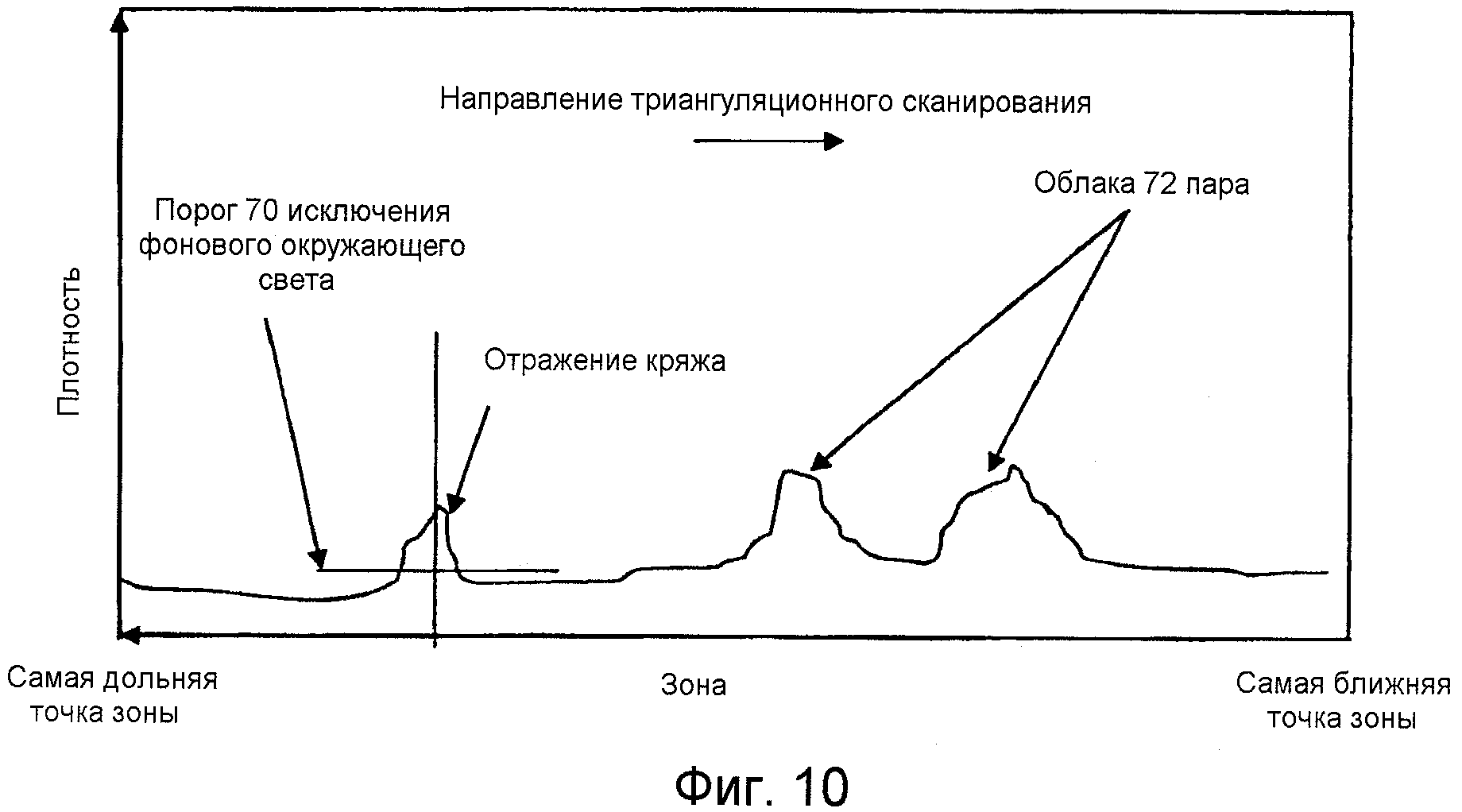
Фиг.10 - иллюстрация, показывающая процесс фильтрации, используемый при сканировании профиля блока;
Фиг.11 - иллюстрация, показывающая положение приблизительного центра блока в процессе предварительного сканирования.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На Фиг.1 и 2 пунктирной линией показано загрузочное устройство (10) станка. Загрузочное устройство 10 станка удерживает кряжевый блок 12 в исходном или первом положении с помощью первого клинообразного элемента 13 и второго клинообразного элемента 14. Блок 12 содержит первый конец 15 и второй конец 16, опирающиеся на клинообразные элементы при загрузке в загрузочное устройство 10 из конвейера (не показан). На Фиг.1 изображены устройства сканирования или камеры 20a-20d профиля блока, свешивающиеся над кряжевым блоком 12 при помощи крепежного приспособления 11. Хотя показаны четыре сканера 20a-20d, для специалистов в данной области техники будет понятно, что может быть использовано любое количество устройств сканирования без изменения сущности и объема заявленного изобретения. Устройство 20 сканирования профиля кряжевого блока (кряжа) представляет собой устройство сканирования триангуляционного типа измерения, способное получать двумерное изображение. Устройство сканирования профиля блока (кряжа) может быть, например, устройством сканирования такого типа, который использует технологию формирования изображения на основе прибора с зарядовой связью (ПЗС) или комплементарного металлооксидного полупроводника (КМОП). Подходящее устройство сканирования профиля блока должно иметь источник освещения, который испускает свет вдоль длины поверхности кряжевого блока 12, отражая поверхностное изображение профиля поверхности блока вдоль его длины на двумерную пиксельную матрицу 26 высокой плотности.
Фиг.1А представляет собой изометрическую проекцию сканерной системы, используемой в предшествующем уровне техники. Сканерная система включает в себя источник освещения, испускающий свет вдоль периферии блока. Камера или устройства сканирования на Фиг.1 ограничены изображением поверхности блока в единственном периферическом положении вдоль блока.
На Фиг.3А показан пример одного варианта осуществления сканерной системы, имеющей источник 23 освещения, отделенный от камеры 32. Источник 23 освещения испускает свет по траектории 24 на блок 12. Свет, распространяющийся по траектории 24 света, отражается от верхней поверхности блока, образуя отраженное изображение 29, которое принимается линзой 25 на камере 32. Анализ отраженного изображения 29 выполняется процессором (не показан), который может быть внутренним или внешним по отношению к камере 32 или устройству 20 сканирования. Отдельный пример варианта осуществления показан на Фиг.3В. Конструкции из Фиг.3В, которые являются такими же или подобными конструкциями из Фиг.3А, обозначены одинаковыми цифрами с добавлением штриха. На Фиг.3В показан источник 23' освещения и принимающая линза 25', расположенная внутри устройства 20' сканирования. Отраженное изображение 29' в конечном итоге проходит через линзу 25' на двумерную пиксельную матрицу 26 высокой плотности. В одном варианте осуществления пиксельная матрица имеет плотность разрешения сканирования 512×512 пикселей на сканер.
Пример подходящего промышленного устройства сканирования профиля блока включает в себя камеру, изготовленную компанией «IVP Integrated Vision Products Inc.», с номером модели IVP Ranger M20 OEM-1. Дополнительное обсуждение по этому типу технологии сканирования раскрывается в патенте «U.S. Patent №6313876», выданном на имя Ekland, который включен в настоящий документ для справки для всех целей и который прилагается к настоящему документу в качестве Приложения В.
Устройство 20' сканирования на Фиг.3В дополнительно включает в себя корпус 21 с окном 22, из которого источник 23' освещения испускает свет по траектории 24' на поверхность блока 12. Источник 23' освещения может являться одним или большим количеством светодиодов или лазерных диодов с линзой для испускания узкой полоски света. Свет, движущийся по траектории 24', дает отраженное изображение 29' поверхности блока и принимается через линзу 25', расположенную в сканере 20'. Линза концентрирует отраженное изображение 29' на двумерную пиксельную матрицу 26. Данные изображения, зафиксированные на пиксельной матрице, затем анализируются и преобразуются в значение, которое соответствует линейному расстоянию сканирования от устройства сканирования 20, то есть связываются с конкретной точкой сканирования или положением rn на блоке 12.
При использовании пиксельной матрицы 512×512 приблизительно 512 расстояний сканирования измеряется каждым устройством сканирования вдоль профиля блока 12 при повороте кряжевого блока на 1,5° или меньше. Каждое расстояние сканирования соотносится с соответствующим углом вращения кряжевого блока и с соответствующим расстоянием от поверхности устройства сканирования до оси вращения кряжевого блока, обеспечивая тем самым получение трехмерных данных для вычисления оси оптимальной обработки.
ОПЕРАЦИЯ ПРЕДВАРИТЕЛЬНОГО СКАНИРОВАНИЯ
Процесс предварительного сканирования происходит в то время, когда блок 12 находится в первом положении для того, чтобы вычислить приблизительный центр 30, как показано на Фиг.2. Во время операции предварительного сканирования четыре устройства 20a-20d сканирования профиля блока анализируют и сканируют блок 12 от первого конца 15 до второго конца 16, как лучше всего видно на Фиг.1.
Каждый из устройств сканирования профиля блока производит 512 точек сканирования, обозначенных значениями r1, r2, r3, … rn в уравнении (1) и показанных на Фиг.3В. Значения rn соответствуют конкретному пикселю в пиксельной матрице 26, то есть анализируются и преобразуются в соответствующее расстояние сканирования. Каждое расстояние сканирования, соответствующее каждой точке сканирования, собирается и хранится в центральном процессоре (ЦП) или компьютере 40. Переменная h в уравнении (1) обозначает известное расстояние от устройств сканирования с учетом расстояния от вычисляемой точки сканирования. Зная значения для h и каждое расстояние сканирования, соответствующее каждой точке rn сканирования вдоль профиля 12 блока, можно вычислить расстояние bn, которое обозначает приблизительный центр 30, как показано в уравнениях ниже и на Фиг.11.



ОПЕРАЦИЯ ВСПОМОГАТЕЛЬНОГО СКАНИРОВАНИЯ ДЛЯ ВЫЧИСЛЕНИЯ ОСИ ОПТИМАЛЬНОЙ ОБРАБОТКИ
После выполнения предварительного сканирования и вычисления приблизительного центра 30 пара шпинделей загрузочного устройства, показанных на Фиг.4 под позициями 17а и 17b, независимо перемещается в соединение с первым и вторым концами кряжевого блока 12 в приблизительном центре 30, вычисленном во время операции предварительного сканирования. Пара гидравлических цилиндров 18а и 18b поднимает блок 12 из первого исходного положения во второе положение обработки или во второе положение, как лучше всего видно на Фиг.4, 5 и 7.
Пока блок поднимается из первого исходного положения в положение обработки или пока он находится в положении обработки, кряжевый блок 12 принимает ориентацию для определения точной трехмерной геометрической конфигурации, из которой может быть вычислена ось оптимальной обработки, путем вращения кряжевого блока 12 с помощью шпинделей 17а и 17b загрузочного устройства. Одновременно свет по четырем траекториям, обозначенным 24а-24b, генерируется источником 23 освещения в каждом соответствующем устройстве сканирования и проецируется вдоль длины профиля блока 12. Каждая траектория света содержит 512 точек сканирования, обозначенных rn, которые обеспечивают отраженные изображения на пиксельной матрице 26, которые приравнивается соответствующему расстоянию сканирования до блока 12. Четыре траектории 24a-24d света объединяются для образования одной траектории 31 сканирования. При вращении блока на 360 градусов множество траекторий 31а, 31b… сканирования генерируются вдоль продольного направления, обозначенного Х на Фиг.5 и 6. Кряжевый блок 12 обычно раскручивается до скорости ω1, равной приблизительно 2 оборотам в секунду, и использование описанных устройств сканирования профиля блока позволяет траекториям сканирования возникать через каждые 1,5 градуса при вращении на 360 градусов блока 12, генерируя тем самым, по меньшей мере, 240 траекторий сканирования. Количество и частота траекторий сканирования может быть даже больше при ускорении и замедлении вращения блока, чаще при замедлении вращения. Использование четырех устройств сканирования профиля блока, каждый из которых имеет 512×512 двумерную пиксельную матрицу и генерирует свет, распространяющийся по траектории вдоль блока приблизительно каждые 1,5 градуса, обеспечивает приблизительно 419520 точек rn сканирования, которые измеряются устройством сканирования и, таким образом, обеспечивают соответствующее расстояние SD сканирования для каждой точки сканирования, как показано на Фиг.7. Такое существенное количество точек сканирования вдоль многочисленных траекторий сканирования обеспечивает повышенную плотность сканирования, дающую четкое трехмерное аналитическое описание кряжевого блока, включающее в себя обнаружение любых наростов или неровностей 28 в блоке, которые часто возникают из-за сучков в дереве. Обычно чем больше масса блока 12, тем медленнее скорость вращения, что приводит к наличию даже большего, чем 419520 точек rn сканирования, о которых говорилось выше.
Расстояния SDn сканирования, полученные на основании пиксельных данных из точек rn сканирования, дают соответствующие радиусы "Rn" точек сканирования, которые совместно образуют ось оптимальной обработки блока 12, показанную линией 50 на Фиг.7. Например, зная SD, высоту Н от центра шпинделя 17 до соответствующего сканера 20 и угол, обозначенный β, который данный световой луч 24 испускает из центра устройства сканирования, можно вычислить радиус Rn точки сканирования, который соответствует радиусу блока в конкретной точке сканирования. Хотя Н является изменяемой величиной, она является известным значением, поскольку каждое расстояние, пройденное шпинделем 17, может быть прослежено ЦП 40, например, с помощью кодировщика (не показан). Радиус Rn точки сканирования является расстоянием от поверхности блока 12 до оси оптимальной 50 обработки для каждой точки rn сканирования. Это показано и вычисляется для радиуса R512 точки сканирования, который соответствует точке сканирования R512 на Фиг.7 и в уравнении (4).
R512=H-X
X=cos(β)*SD

Местоположение радиусов Rn точек сканирования из потока данных, генерируемых 512 точками сканирования от каждого устройства сканирования во время поворота на 1,5 градуса блока 12, обеспечивают точную трехмерную форму кряжевого блока 12. Трехмерная форма обеспечивает приблизительно 419520 радиусов точек сканирования, из которых вычисляется ось оптимальной обработки. После вычисления оси оптимальной 50 обработки такое расположение используется для размещения блока 12 с помощью пары маятниковых зажимов для перемещения кряжевого блока 12 в лущильный станок 60, показанный в общем виде пунктирными линиями на Фиг.2, для наибольшей выработки при лущении кряжа. Процесс, выполняемый лущильным станком 60, подробно описан в патенте US 6116306.
ПЕРЕКРЫВАНИЕ ТРАЕКТОРИИ СКАНИРОВАНИЯ
Расположение точек Гц сканирования от каждого сканера вдоль длины кряжевого блока изменяется с расстоянием от каждого сканера до поверхности кряжа, обычно находится в интервале от 0,050 дюйма до 0,100 дюйма в рабочем диапазоне каждого устройства сканирования. Когда устройства сканирования перекрывают друг друга, в результате получаются более плотные или более сжатые данные, и иногда (со ссылкой на Фиг.7 и 8) два показания Х могут случайно применяться к одному и тому же положению Y. Алгоритм 100 оптимизации будет использовать меньший измеренный радиус для вычисления оси оптимальной 50 обработки. Дополнительным преимуществом перекрывания является более точное определение поверхности путем исключения затенения, которое может быть результатом выступов или выемок поверхности.
Каждое расстояние SD сканирования преобразуется в расстояние Х (перпендикулярное расстояние от поверхности устройства сканирования до поверхности кряжа, как показано на Фиг.7 и 8) и расстояние Y вдоль длины кряжа 12 до положения горизонтального центра. Для каждого сканера Y сначала выражается как расстояние от вертикальной осевой линии устройства сканирования, отрицательным относительно правой стороны от центра и положительным относительно левой. Компьютер 40 интерфейса устройства сканирования собирает данные от всех четырех устройств сканирования и просматривает все диапазоны показаний для оптимизации вычислений в форме координат Х (перпендикулярное расстояние от поверхности сканера до поверхности кряжа) и координат Y (расстояние вдоль длины кряжа) с Y=0 в центре потока материала, причем отрицательный Y справа и положительный Y слева. Например (предположим, что Х является постоянной и равной 63 дюйма), последнее значение SD на каждом конце блока длиной 100 дюймов будет представляться для оптимизации вычислений как Х=63 дюйма, Y=-50 дюймов на правом конце и Х=63 дюйма, Y=+50 дюймов на левом конце.
На Фиг.1 показаны три зоны перекрывания, обозначенные 27а, 27b и 27с. Каждая зона 27 перекрывания получается от каждой соответствующей траектории 24 света сканера, простирающейся за траекторией света смежного устройства сканирования. Величина площади поверхности блока 12, охватываемой зонами 27 перекрывания, изменяется в зависимости от величины диаметра и положения блока. Зоны перекрывания становятся меньше при увеличении диаметра блока 12 или при приближении блока к устройству сканирования, как видно при сравнении Фиг.1 (блок, размещенный в позиции предварительного сканирования) с Фиг.4 (блок, размещенный в позиции вспомогательного сканирования).
Зоны 27 перекрывания дают преимущество при анализе площадей вдоль блока, подверженных затенению, возникающему от выступов или выпуклостей вдоль профиля блока, как лучше всего видно на Фиг.8, являющейся увеличенной частью кряжевого блока 12. Зоны перекрывания, например на Фиг.8, использующие сканеры 20b и 20с, обеспечивают два различных значения расстояния сканирования для точки rx сканирования, обозначенных SD1 и SD2 соответственно. Алгоритм 100 оптимизации, встроенный в программы или в исходный код, решает, какое расстояние сканирования использовать для перекрывающихся точек сканирования, что по существу показано на блок-схеме алгоритма из Фиг.9.
Обратимся теперь к Фиг.9, на которой исходный код алгоритма 100 оптимизации начинается в шаге 110. Расстояние сканирования, отражаемое на пиксельную матрицу 26 для каждого устройства сканирования, определяет значение в шаге 120 и определяет положение координат в шаге 130 относительно значения в шаге 120. Точка принятия решения в шаге 140 оценивает, находятся ли точки координат в зоне перекрывания и определяют ли одинаковое положение. Если точки не перекрываются, радиус Rn точки сканирования кряжевого блока 12 вычисляется для конкретной точки rn сканирования в шаге 145. Если точки сканирования перекрываются и определяют одинаковое положение, в шаге 150 выполняется сравнение. В шаге 150 для каждой общей точки сканирования сравниваются расстояния сканирования. Точка сканирования, имеющая большее расстояние сканирования, выбирается для вычисления радиуса Rn точки сканирования блока в шаге 160. Обращаясь снова к Фиг.8, на которой SD1 больше, чем SD2, поэтому значение SD1 будет использоваться для вычисления радиуса Rn точки сканирования для точки rx сканирования в соответствии с программой 100. В результате программирование и зоны 27 перекрывания дают меньший диаметр и более точное изображение кряжевого блока 12 в условиях затенения.
ФИЛЬТРАЦИЯ ПРОНИКНОВЕНИЯ ПАРА
Окружающая среда сканирования часто включает в себя находящийся в воздухе пар, или любой другой находящийся в воздухе материал, или случайное излучение между камерой или устройством 20 сканирования и сканируемым блоком 12. Пар обычно испускается из сканируемого блока 12 и/или из лущильного шпона от ранее сканированного блока. Даже если лазерное освещение и отражение от поверхности блока проникает через пар, случайные отражения от пара могут стать причиной многочисленных посторонних областей показаний данных.
Фиг.10 показывает процесс фильтрации, используемый при сканировании профиля блока. Камеры 20 сканируют от самой дальней зоны к самой ближней. Показание только дальней зоны определяют поверхность блока, поэтому только самые дальние показания используются для вычисления оси оптимальной обработки. Порог 70 предусматривается для исключения фонового окружающего света и позволяет проводить точные измерения зоны. Иными словами, если расстояние сканирования измеряет такой объект, как случайные отражения, находящийся в воздухе материал или облака 72 пара, измеренное расстояние сканирования будет меньше, чем порог 70, и, таким образом, измерение расстояния сканирования отклоняется или отфильтровывается из центрального процессора или компьютера 40 при вычислении оси оптимальной 50 обработки.
Хотя изобретение было описано до некоторой степени в частностях, изобретение включает в себя все модификации и изменения раскрытого иллюстративного варианта осуществления, попадающие в рамки сущности и объема прилагаемой формулы изобретения.
Реферат
Изобретение относится к системам измерения геометрического центра кряжевого блока в трех измерениях. Система содержит загрузочное устройство и, по меньшей мере, один механизм устройства сканирования блока. Механизм устройства сканирования блока включает в себя источник освещения для испускания света вдоль длины поверхности кряжевого блока, образования множества точек сканирования и устройство формирования изображения для получения множества точек сканирования, которые отражаются от поверхности кряжевого блока. Система дополнительно содержит процессорный блок, который компилирует информацию от устройства формирования изображения, представляющего трехмерное изображение кряжевого блока. Процессорный блок вычисляет ось оптимальной обработки из трехмерного изображения. Использование изобретения позволяет повысить эффективность и точность сканирования. 2 н.п. и 16 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ распиловки бревен на продольно-распиловочном станке и станок для его осуществления
Комментарии