Оптическое считывание положения и/или формы - RU2541139C2
Код документа: RU2541139C2
Чертежи







Описание
По данной заявке испрашивается приоритет по предварительной заявке на выдачу патента США под № 61/243,746, поданной 18 сентября 2009 года, № 61/255,575, поданной 28 октября 2009 года, и 61/350,343, поданной 1 июня 2010 года, содержимое которых включено в материалы настоящей заявки посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Область техники относится к оптическим измерениям, а конкретнее, к оптическому считыванию положения и/или формы.
УРОВЕНЬ ТЕХНИКИ
Измерение формы является общим термином, который включает в себя считывание положения структуры в трехмерном пространстве. Это измерение совпадает с тем, что воспринимает глаз человека в качестве положения объекта. Поскольку глаза непрерывно выполняют эту задачу, можно было бы предположить, что измерение является простым. Если рассматривать кусок веревки, можно физически измерить положение на каждом дюйме вдоль веревки для оценки формы. Но эта задача утомительна и гораздо более трудна при более сложных формах. Еще одно соображение состоит в том, каким образом выполнять измерение, если веревка не может быть физически досягаема или видима. Если веревка вмещена вовнутрь герметизированного ящика, ее положение не может определяться традиционными технологиями измерения. Веревка в этом примере может быть заменена оптическим волокном.
Считывание (измерение) формы длинного и тонкого деформированного цилиндра, такого как оптическое волокно, полезно во многих применениях, например, простирающихся от производства и строительства до медицины и авиакосмической промышленности. В большинстве этих применений система считывания формы должна быть способна точно определять положение оптоволокна, например, в пределах менее чем одного процента его длины, а во многих случаях, менее чем одна десятая одного процента его длины. Есть некоторое количество подходов к проблеме измерения формы, но ни один не направляет усилия в достаточной мере на требования большинства применений, так как они слишком медленны, не приближаются к требуемым уровням точности, не действуют при наличии крутых изгибов или претерпевают неудачу в том, чтобы в достаточной мере учитывать скручивание оптоволокна. Во многих применениях, наличие крутящих сил, которые скручивают оптоволокно, подрывает точность и, таким образом, полезность этих подходов.
Традиционные подходы к измерению формы оптоволокна используют деформацию в качестве фундаментального измерительного сигнала. Деформация является отношением изменения длины сегмента оптоволокна после напряжения к исходной длине такого сегмента (до напряжения). По мере того как объект, подобный оптоволокну изгибается, материал на внешней стороне изгиба растягивается, в то время как материал на внутренней стороне изгиба сжимается. С учетом известности этих изменений локальной деформации и с учетом известности исходного положения объекта, может быть произведена аппроксимация нового положения оптоволокна.
Для того чтобы эффективно измерять местоположение с высокой точностью, должны быть приняты меры в ответ на несколько ключевых факторов. Во-первых, что касается основанного на деформации подхода, измерения деформации являются предпочтительно точными до уровней десятков нанодеформаций (10 частей на миллиард). Однако высокая точность измерений деформации не является легко достижимой традиционными резистивными или оптическими тензометрами. Поэтому должна быть разработана новая технология для измерения деформации с чрезвычайно высокой точностью, которая не основана на деформации в традиционном смысле.
Во-вторых, наличие скручивания в оптическом волокне должно измеряться с высокой степенью точности и учитываться при вычислении формы. При изготовлении многожильного оптоволокна, которое является завитым в спираль и имеет центральную жилу, может измеряться скручивание оптоволокна. Но проблема состоит в том, каким образом получать точность углового положения более высокую, чем 1 градус. Для высокоточного датчика поворота положение датчиков деформации по длине оптоволокна также должно быть известно с высокой степенью точности. Поэтому желателен некоторый способ измерения величины поворота внешних жил в завитом в спираль оптоволокне, который в таком случае может использоваться для внесения поправки в расчет положения оптоволокна.
В-третьих, оптоволокно с многочисленными жилами, которое закручено в спираль с достаточной интенсивностью и с решетками Брэгга (традиционным оптическим тензометром) является трудным и дорогостоящим для изготовления. Поэтому желательно предоставить способ, обеспечивающий разрешения нанодеформации без решеток Брэгга.
В-четвертых, многожильное оптоволокно типично не является сохраняющим поляризацию, и значит, предпочтительно принимаются во внимание эффекты поляризации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Технология, описанная ниже, поясняет, как использовать внутренние свойства оптического волокна для предоставления возможности очень точного расчета формы в свете вышеприведенных факторов и соображений. По существу, положение оптоволокна определяется посредством интерпретации обратных отражений лазерного света, рассеянного от молекул стекла внутри волокна. Это измерение может выполняться быстро, с высоким разрешением и с высокой степенью точности.
Раскрыты очень точные способ измерения и устройство для измерения положения и/или направления с использованием многожильного оптоволокна. Изменение оптической длины обнаруживается в некоторых из жил многожильного волокна вплоть до некоторой точки на многожильном волокне. Местоположение и/или направление наведения определяются в точке на многожильном волокне на основании выявленных изменений оптической длины. Направление наведения соответствует углу изгиба многожильного оптоволокна в положении вдоль многожильного волокна, определенном на основании сигналов ортонормальной деформации. Точность определенного местоположения является более высокой, чем 0,5% оптической длины многожильного оптоволокна вплоть до точки на многожильном оптоволокне. В предпочтительном примерном варианте осуществления, определение включает в себя определение формы, по меньшей мере, участка многожильного оптоволокна на основании выявленных изменений оптической длины.
Определение может включать в себя расчет угла изгиба многожильного оптоволокна в любом положении вдоль многожильного оптоволокна на основании выявленных изменений длины вплоть до указанного положения. После этого, форма многожильного оптоволокна может определяться на основании рассчитанного угла изгиба. Угол изгиба может рассчитываться в двух или трех измерениях.
Выявление изменения оптической длины предпочтительно включает в себя выявление пошагового (инкрементного) изменения оптической длины в некоторых жилах в многожильном волокне для каждой из многочисленных длин сегментов вплоть до точки на многожильном волокне. Общее обнаруженное изменение оптической длины, в таком случае, основано на инкрементных изменениях. Изменение оптической длины определяется посредством расчета изменения оптической фазы на каждой длине сегмента вдоль многожильного волокна и развертывания изменения оптической фазы для определения оптической длины.
Более точно, в неограничивающем примерном варианте осуществления, может выявляться фазовая характеристика светового сигнала, отраженного в, по меньшей мере, двух из многочисленных жил от многочисленных длин сегментов. Деформация в оптоволокне на длинах сегментов вызывает сдвиг по фазе отраженного светового сигнала от длин сегментов в двух жилах. Фазовая характеристика предпочтительно непрерывно контролируется вдоль оптической длины многожильного оптоволокна для каждой длины сегмента.
В еще одном неограничивающем примерном варианте осуществления, отраженная картина релеевского рассеяния в отраженном световом сигнале выявляется для каждой длины сегмента, тем самым, устраняя необходимость в решетках Брэгга или тому подобном. Картина релеевского рассеяния в отраженном свете сравнивается с эталонной картиной релеевского рассеяния для каждой длины сегмента. Фазовая характеристика определяется для каждой длины сегмента на основании сравнения.
Неограничивающий примерный вариант осуществления также определяет параметр скручивания, связанный с многожильным волокном, в точке многожильного волокна на основании выявленных изменений оптической длины многожильного оптоволокна. Местоположение в точке на многожильном оптоволокне затем преобразуется в ортонормальную систему координат на основании определенного параметра скручивания. Предпочтительно, определенный параметр скручивания корректируется для каждой из длин сегментов.
В одном из примерных вариантов осуществления, где многожильное оптоволокно включает в себя три периферийных жилы, разнесенных вокруг четвертой жилы вдоль центра многожильного волокна, определяется фазовая характеристика светового сигнала, отраженного в каждой из четырех жил от каждой длины (отрезка) сегмента. Деформация в многожильном волокне на одной или более длин сегментов вызывает сдвиг по фазе отраженного светового сигнала в каждой жиле. Эти фазовые характеристики для трех периферийных жил усредняются. Усредненная фазовая характеристика комбинируется с фазовой характеристикой четвертой жилы для удаления деформации общего вида. Параметр скручивания затем определяется из комбинированной фазовой характеристики.
В еще одном неограничивающем примерном варианте осуществления, вызванные изгибом изменения оптической длины вдоль многожильного волокна определяются и учитываются при определении параметра скручивания. Изгиб на одной из длин сегментов рассчитывается и возводится в квадрат. Возведенный в квадрат изгиб умножается на постоянную для формирования произведения изгиба, которое комбинируется с определенным изменением оптической длины внешней жилы в многожильном волокне с одной длиной сегмента. Одно из примерных выгодных применений для этого варианта осуществления предназначено для радиусов изгиба, меньшего, чем 50 мм.
Еще один неограничивающий примерный вариант осуществления определяет угловую ориентацию многожильного волокна вокруг своей оси в точке на многожильном волокне на каждой из длин сегментов. Производится поправка на воздействие кручения и получающееся в результате скручивание в определенной ориентации на основании выявленных изменений оптической длины многочисленных жил волокна. Эта поправка требуется для вычисления правильного направления изгиба.
При условии многожильного оптоволокна, характеризуемого номинальной интенсивностью закручивания, еще один неограничивающий примерный вариант осуществления определяет угол поворота многожильного оптоволокна в точке на многожильном волокне на каждой из длин сегментов по сравнению с номинальной интенсивностью скручивания многожильного волокна. Отклонение номинальной интенсивности закручивания в точке вдоль многожильного оптоволокна определяется и подвергается внесению поправки. «Коэффициент вобуляции» определяется для многожильного волокна посредством ограничения многожильного оптоволокна криволинейной ориентацией в одной плоскости. Затем, производится поправка на коэффициент вобуляции при определении местоположения в точке на многожильном волокне на основании выявленных изменений оптической длины.
В еще одном неограничивающем примерном варианте осуществления, свет пропускается с по меньшей мере двумя состояниями поляризации вдоль многожильного оптоволокна. Отражения света с, по меньшей мере, двумя состояниями поляризации комбинируются и используются при определении местоположения или направления наведения в точке на многожильном волокне на основании выявленных изменений оптической длины. Два состояния поляризации включают в себя первое состояние поляризации и второе состояние поляризации, которые являются, по меньшей мере, номинально ортогональными. Контроллер поляризации используется для пропускания первого светового сигнала в первом состоянии поляризации вдоль многожильного волокна и для пропускания второго светового сигнал во втором состоянии поляризации вдоль многожильного волокна. Независимое от поляризации изменение оптической длины в каждой одной из многочисленных жил в многожильном волокне рассчитывается до точки на многожильном волокне с использованием отражений первого и второго световых сигналов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 показывает поперечный разрез примерного многожильного волокна;
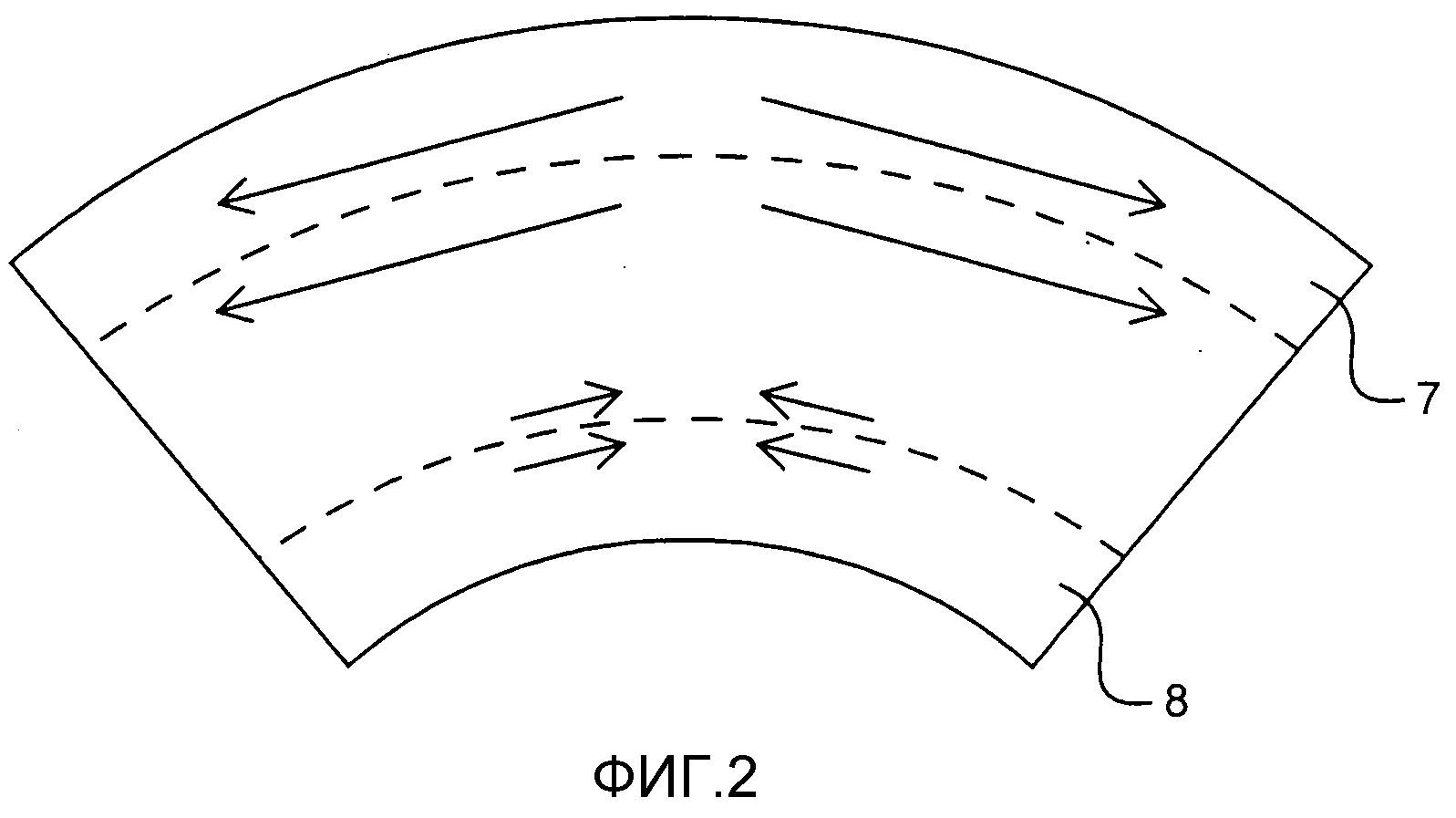
фиг. 2 показывает изогнутое многожильное волокно;
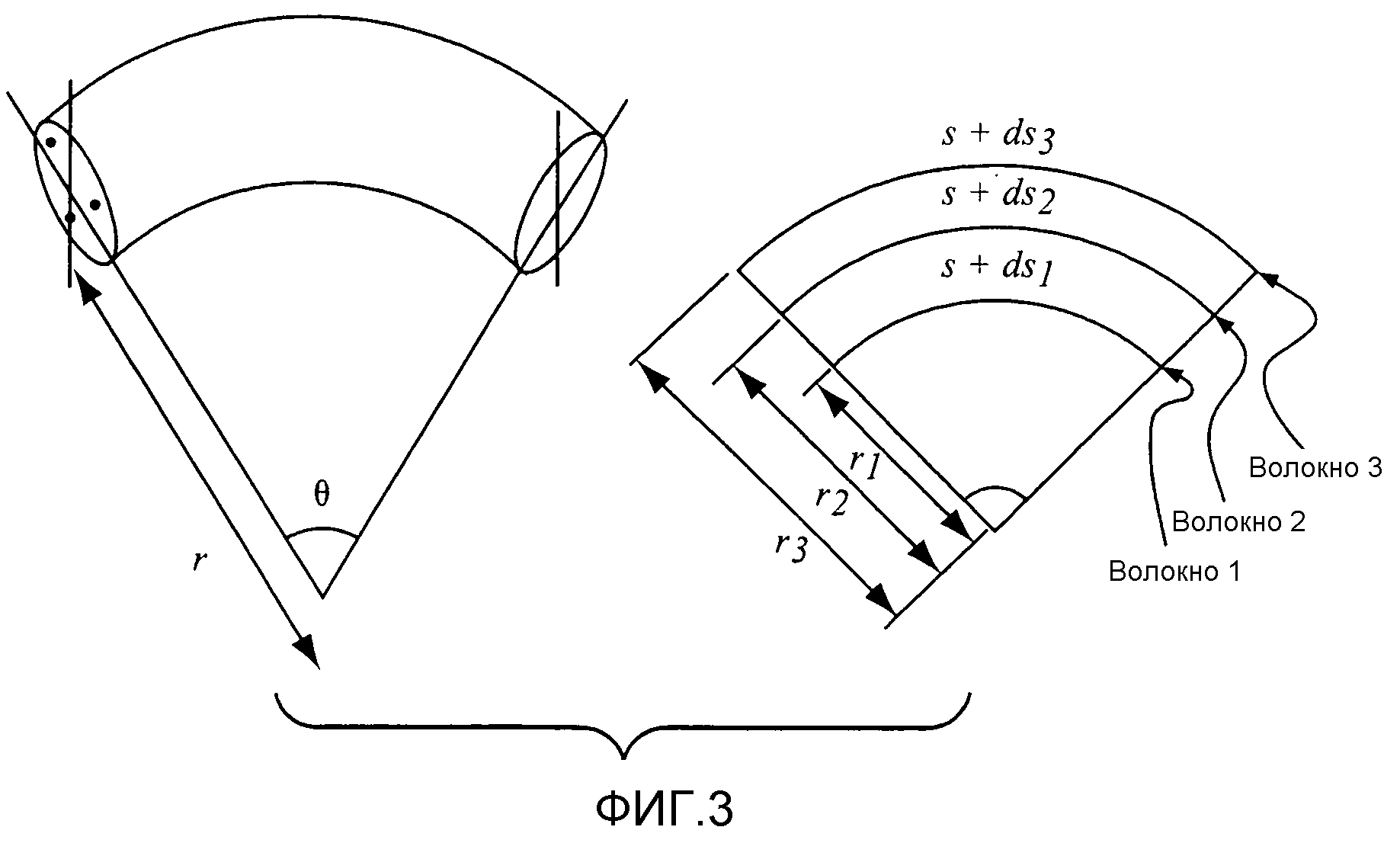
фиг. 3 показывает, что изгиб в волокне пропорционален деформации в не осевых жилах (смещенных от оси);
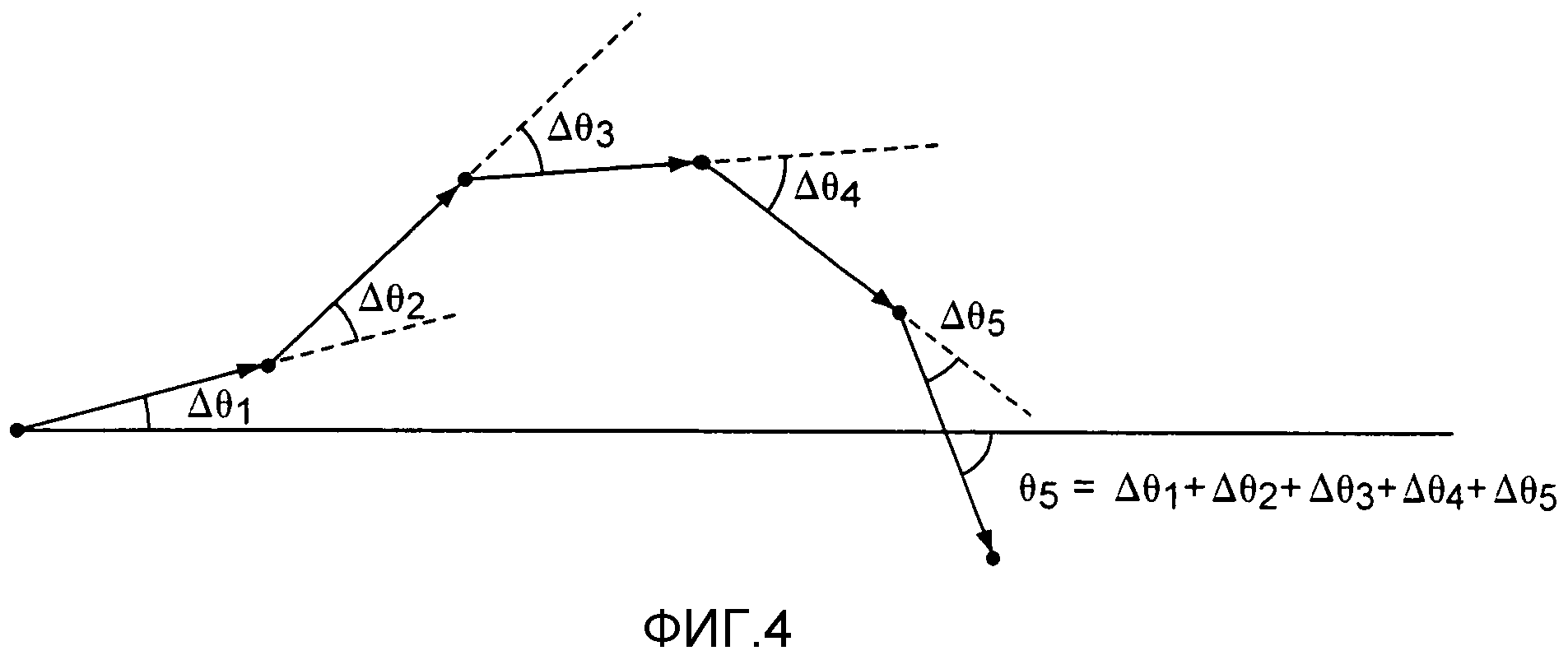
фиг. 4 показывает, что угол изгиба в любом местоположении вдоль волокна может определяться суммированием всех предыдущих углов;
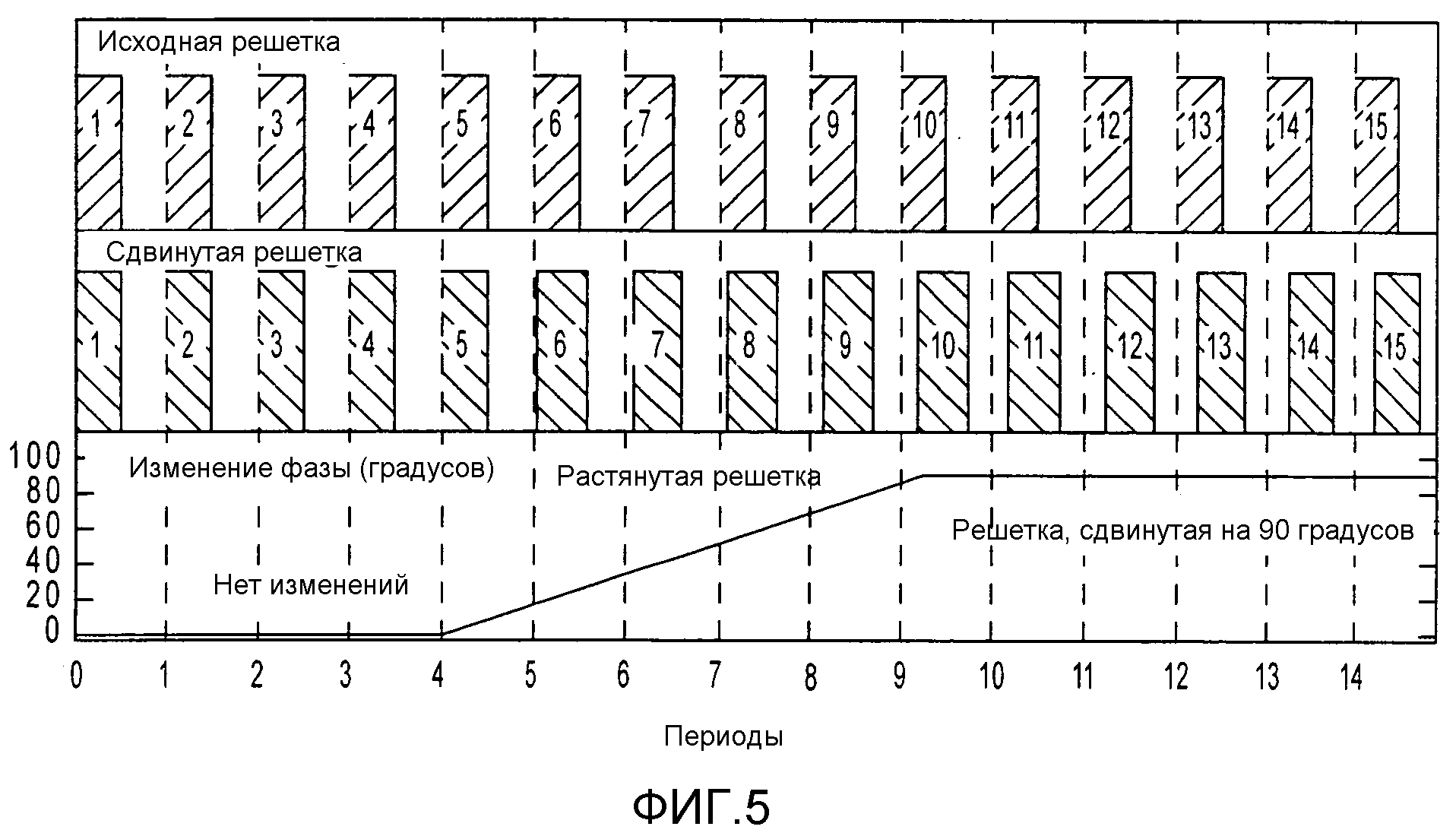
фиг. 5 показывает, что по мере того, как оптоволокно, содержащее в себе решетки Брэгга, деформируется, начинает накапливаться разность фаз, измеренная от эталонного состояния;
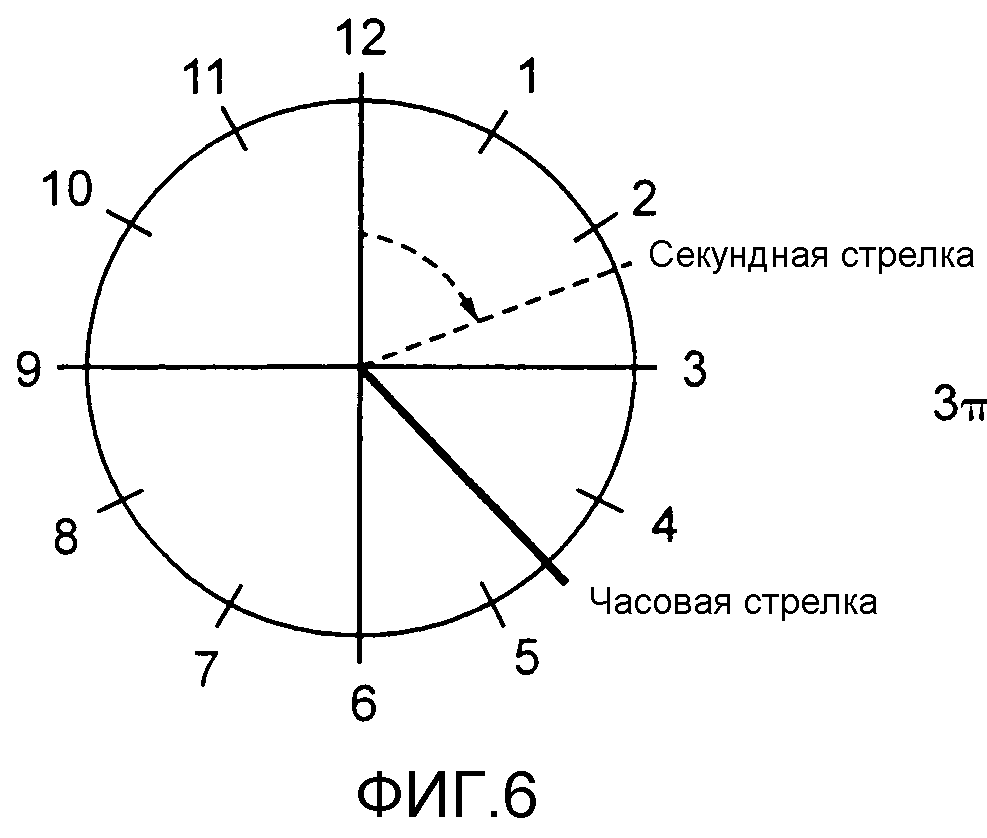
фиг. 6 показывает часы, которые помогают сделать наглядной зависимость между фазовым сдвигом и положением;
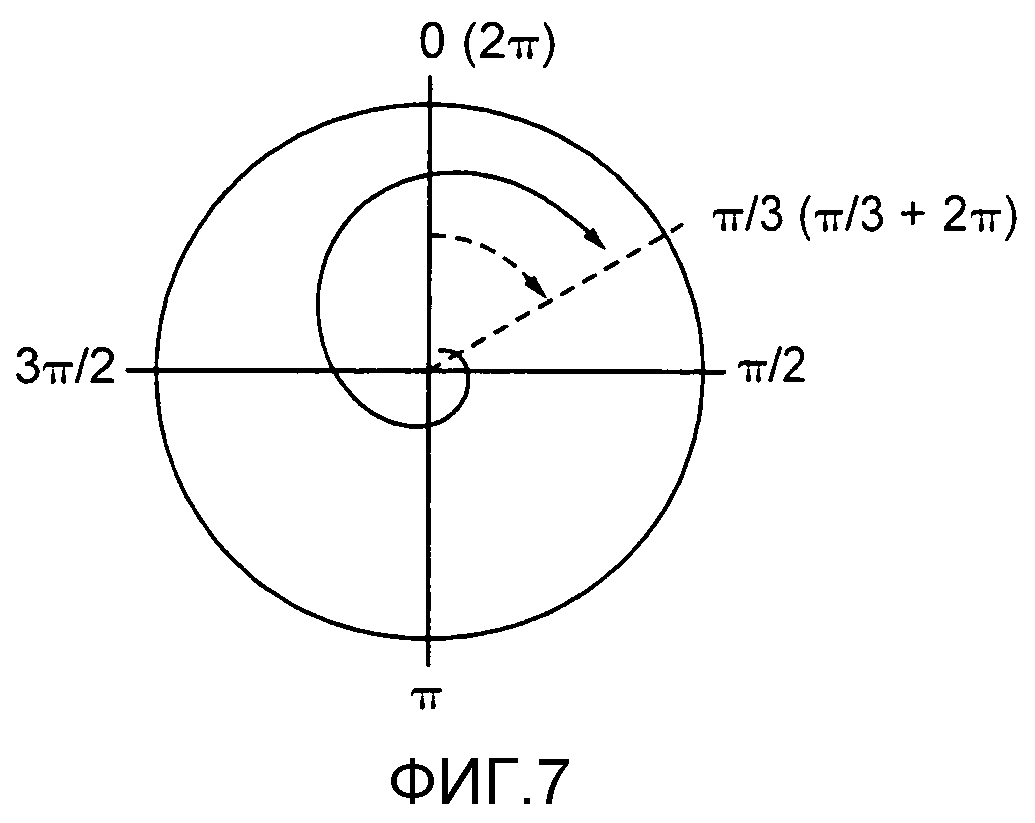
фиг. 7 иллюстрирует, насколько может быть проблематичным недостаток разрешения при измерении фазы;
фиг. 8 - график, который показывает разность фаз сигнала релеевского рассеяния между эталонным сканированием и измерительным сканированием в начале секции волокна, которая находится в напряженном состоянии.
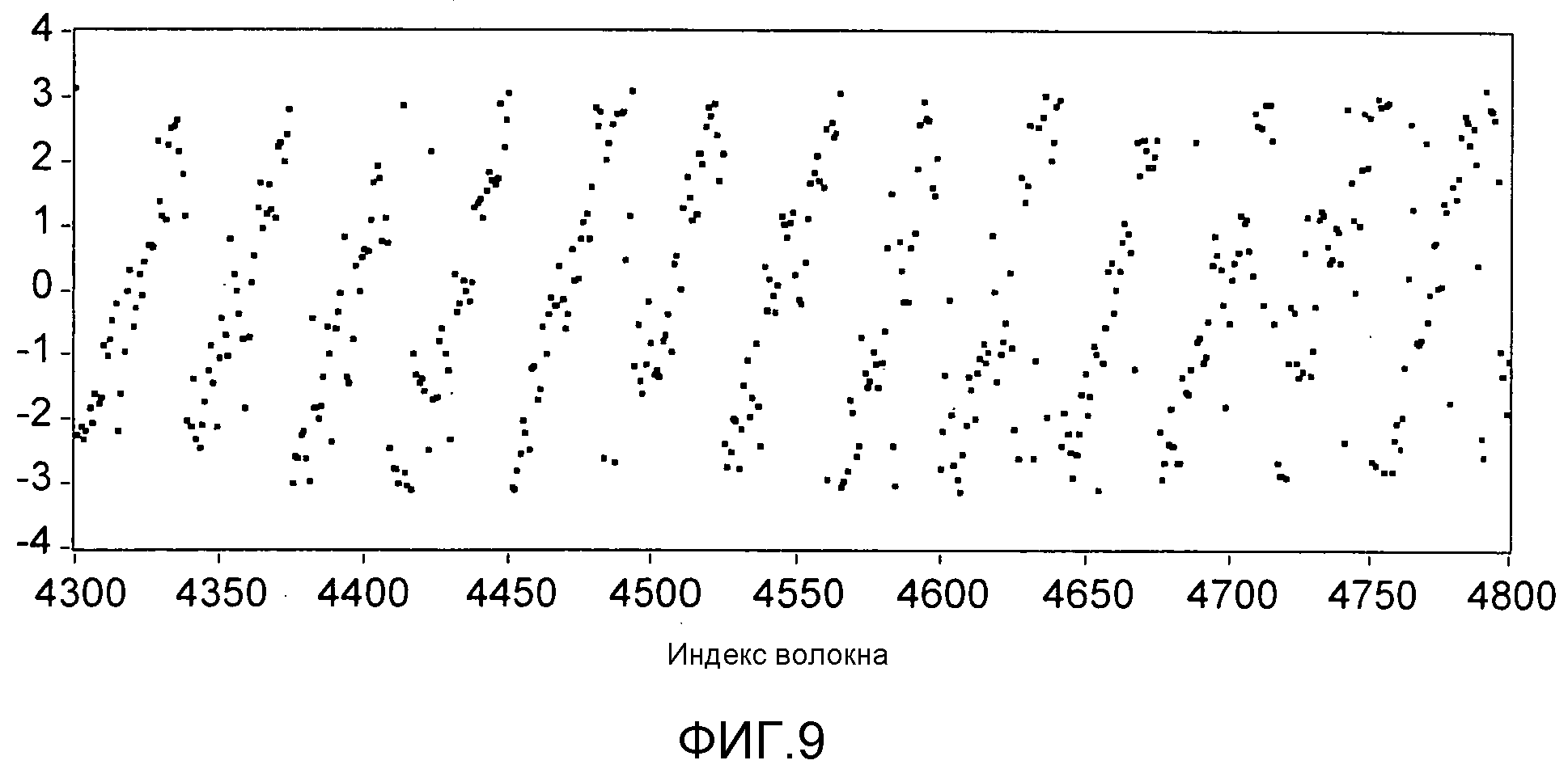
фиг. 9 - график, который показывает, что когерентность теряется с эталонным измерением на большем расстоянии вдоль волокна, находящегося в напряженном состоянии;
фиг. 10 показывает оптическую фазу, графически нанесенную в зависимости от частоты для двух разных задержек;
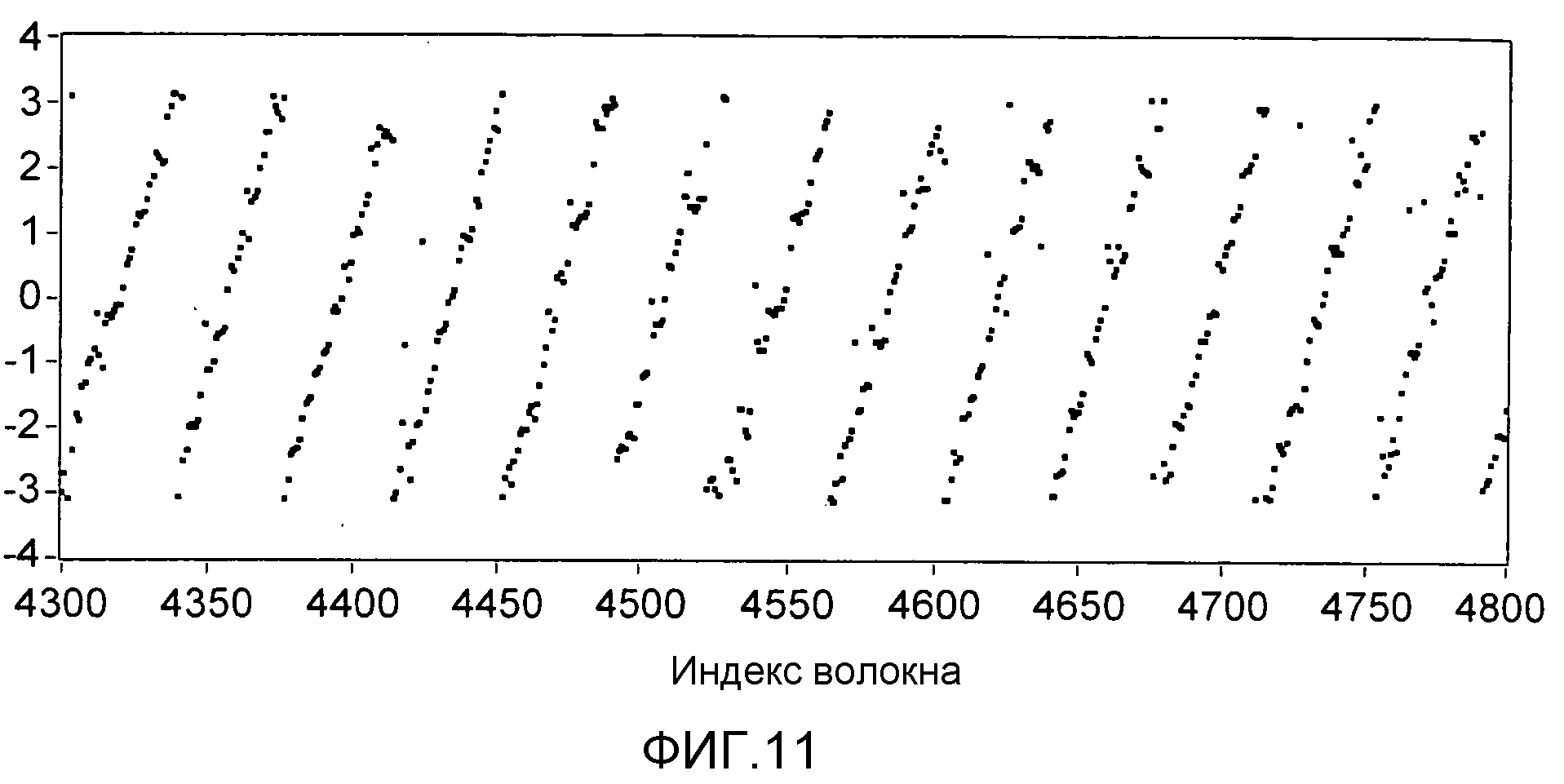
фиг. 11 показывает восстановленную фазу в секции оптоволокна, где возникла треть сдвига в показателях;
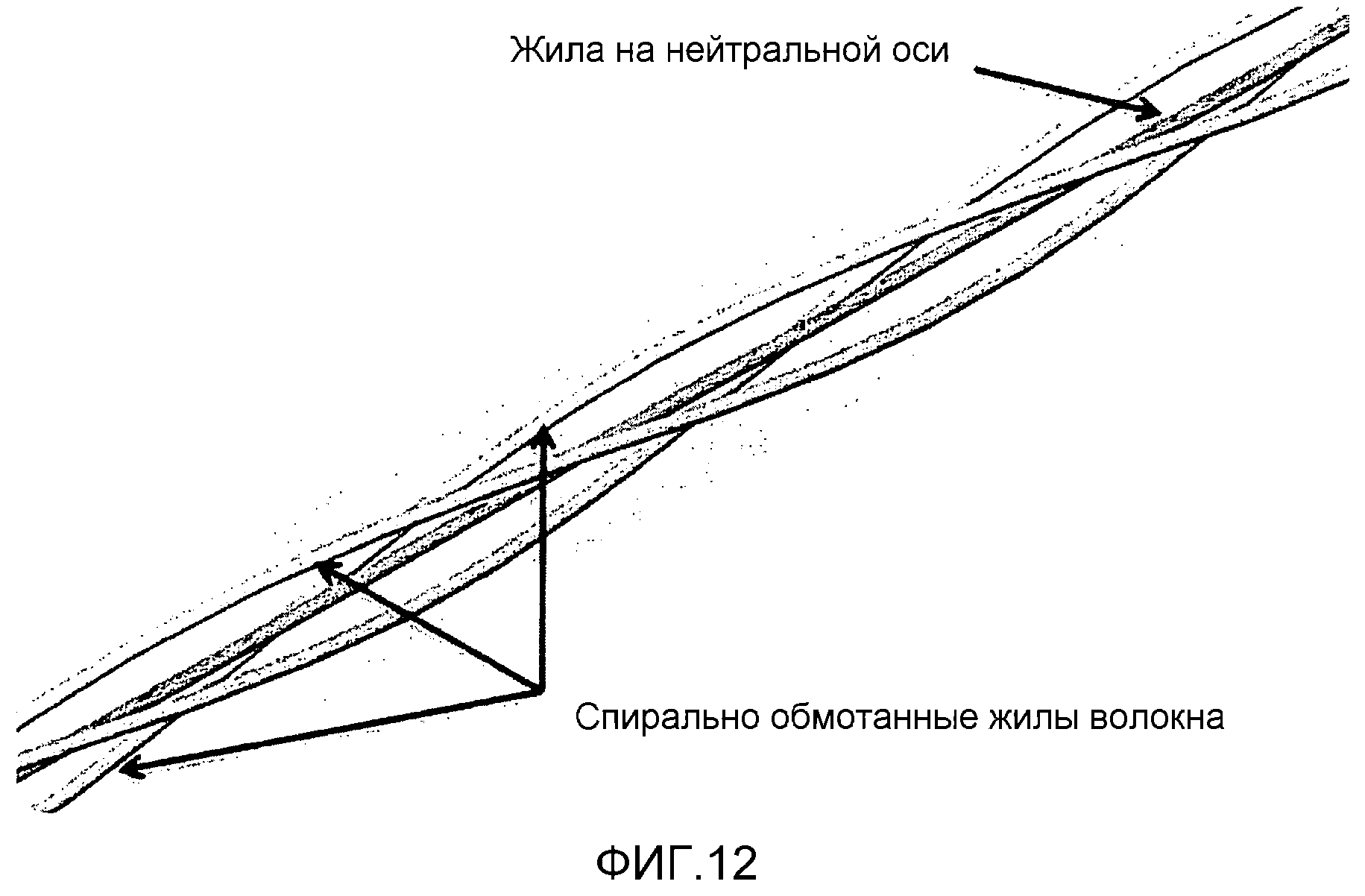
фиг. 12 иллюстрирует пример спирально скрученного многожильного измеряющего форму волокна;
фиг. 13 иллюстрирует неограничивающее примерное испытательное многожильное оптическое волокно;
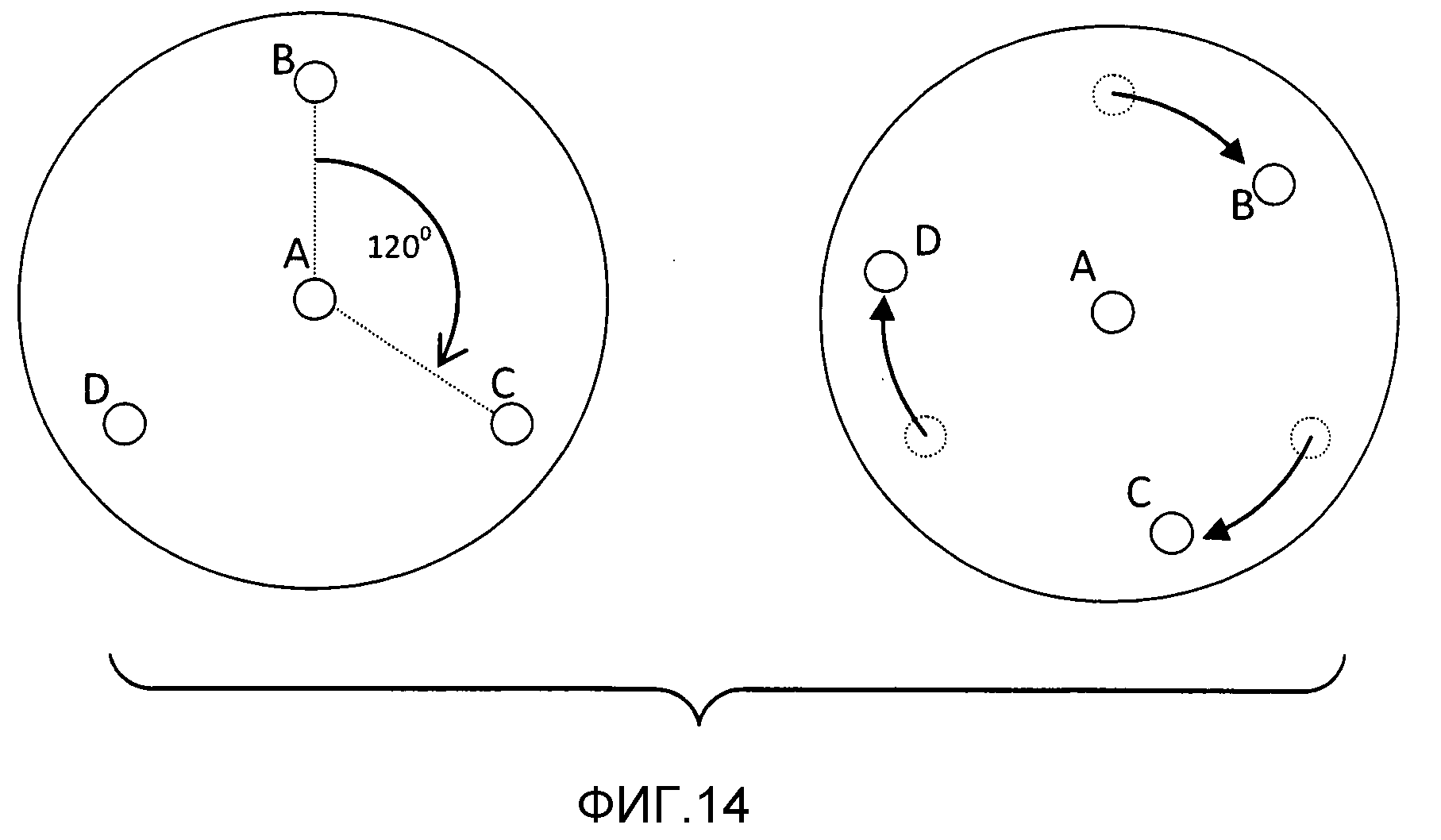
фиг. 14 иллюстрирует поперечный разрез скрученного в спираль волокна, где положение внешних жил оказывается поворачивающимся вокруг центральной жилы с продвижением вдоль по длине оптоволокна;
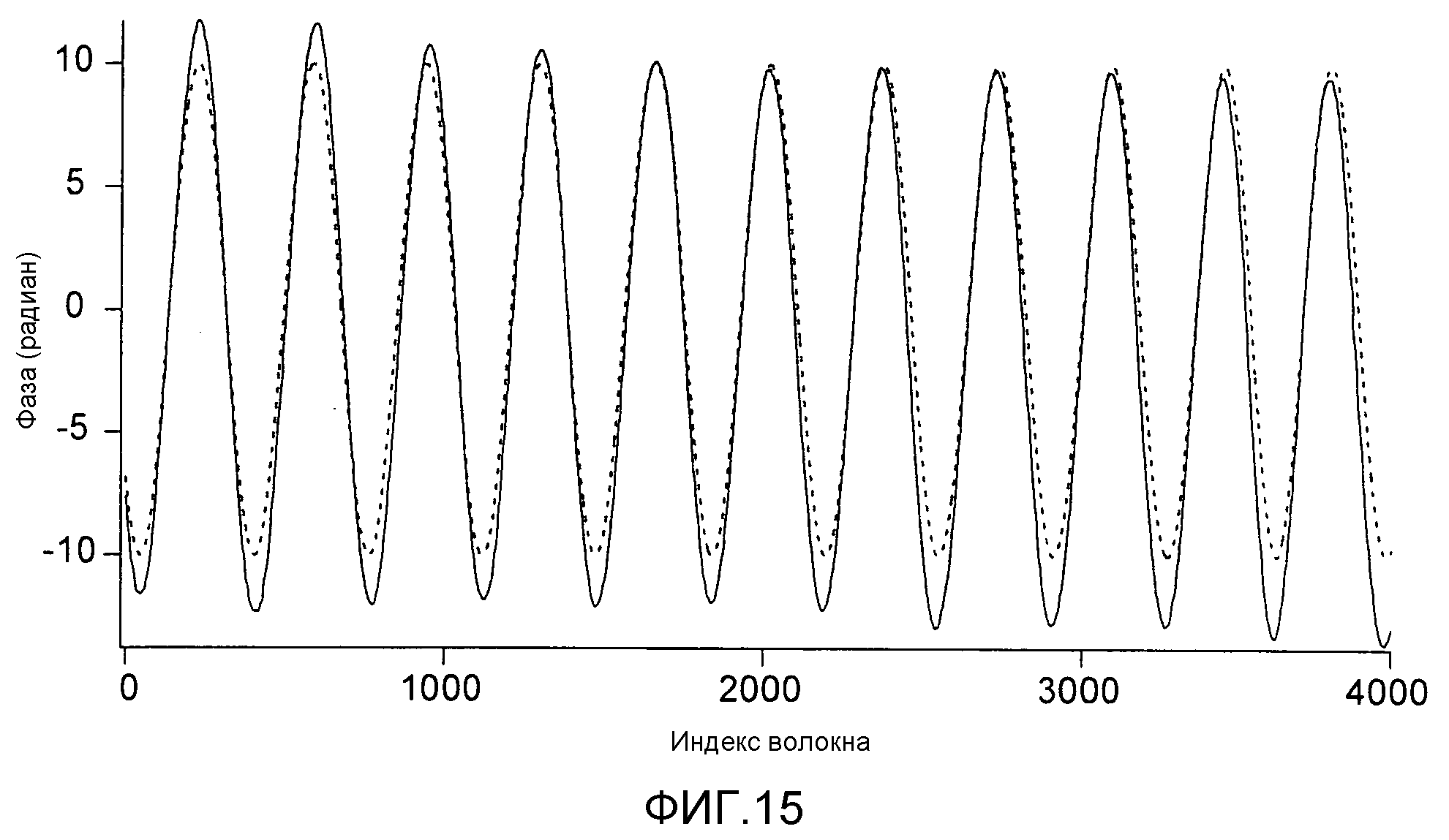
фиг. 15 - график, который иллюстрирует пример колебаний интенсивности закручивания оптоволокна;
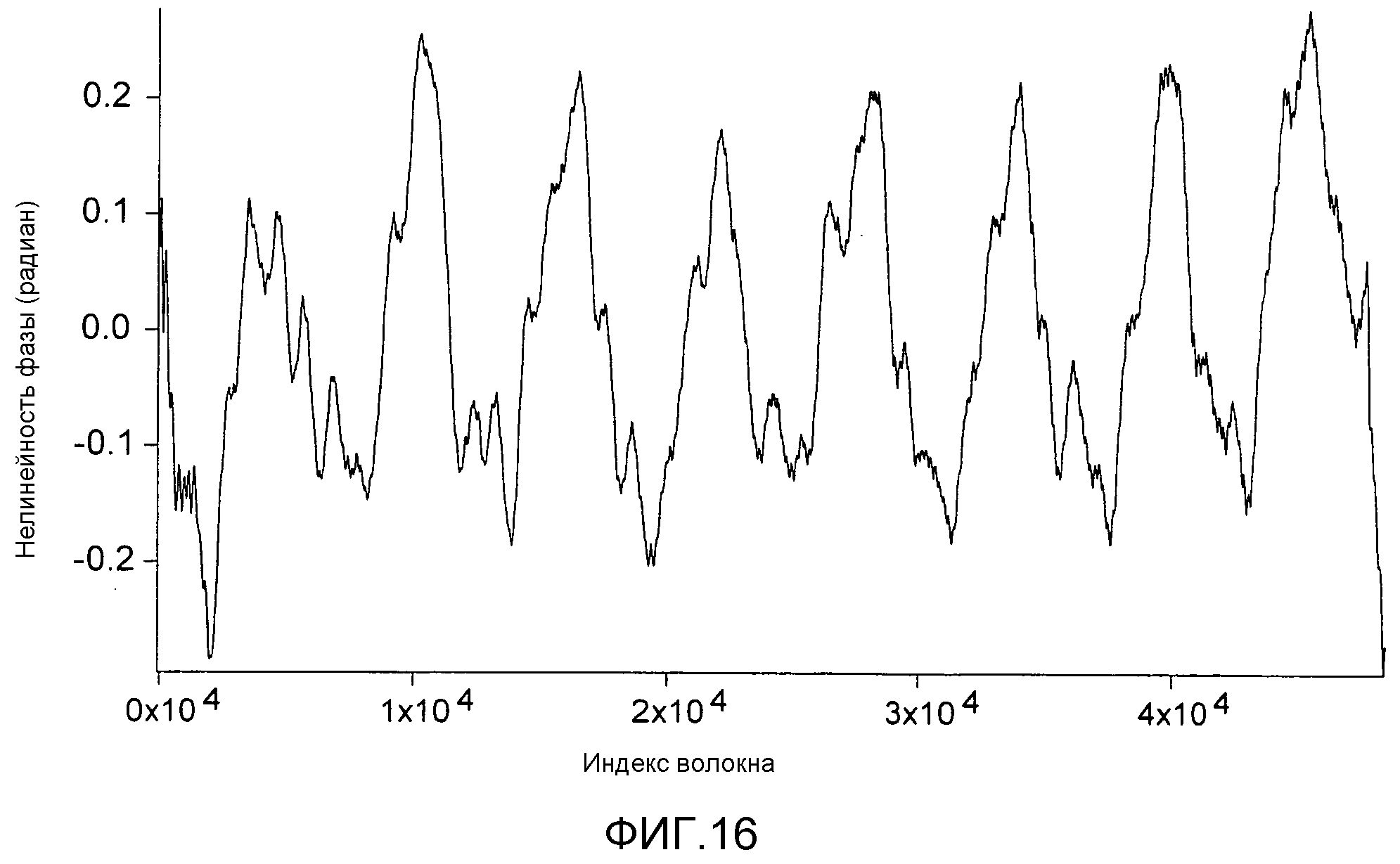
фиг. 16 - график, который показывает примерный сигнал вобуляции с периодическим отклонением фазы от произведенной интенсивности закручивания по длине измеряющего форму волокна;
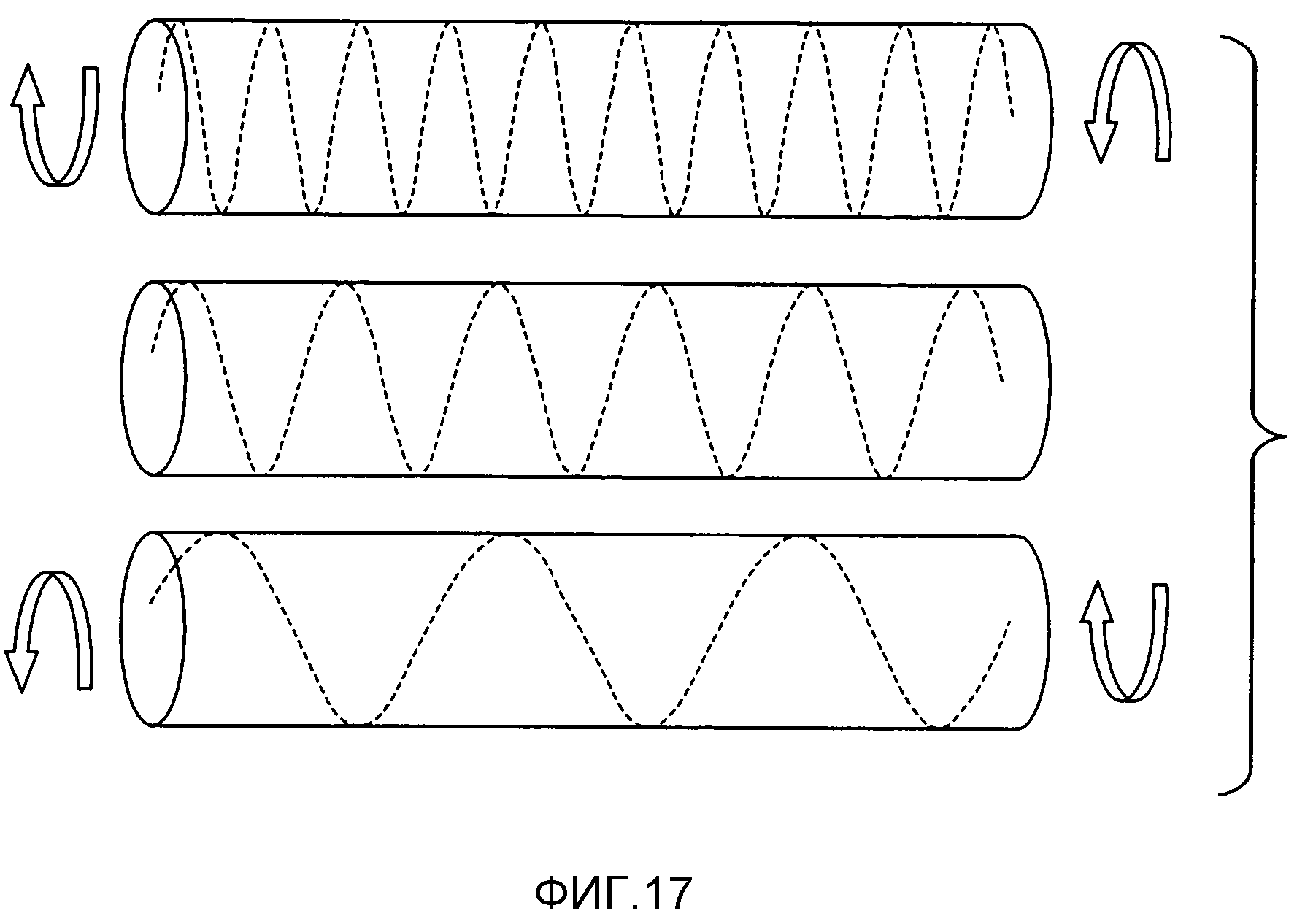
фиг. 17 показывает, как кручение изменяет интенсивность закручивания измеряющего форму волокна, на основании ориентации силы к номинальному направлению закручивания волокна;
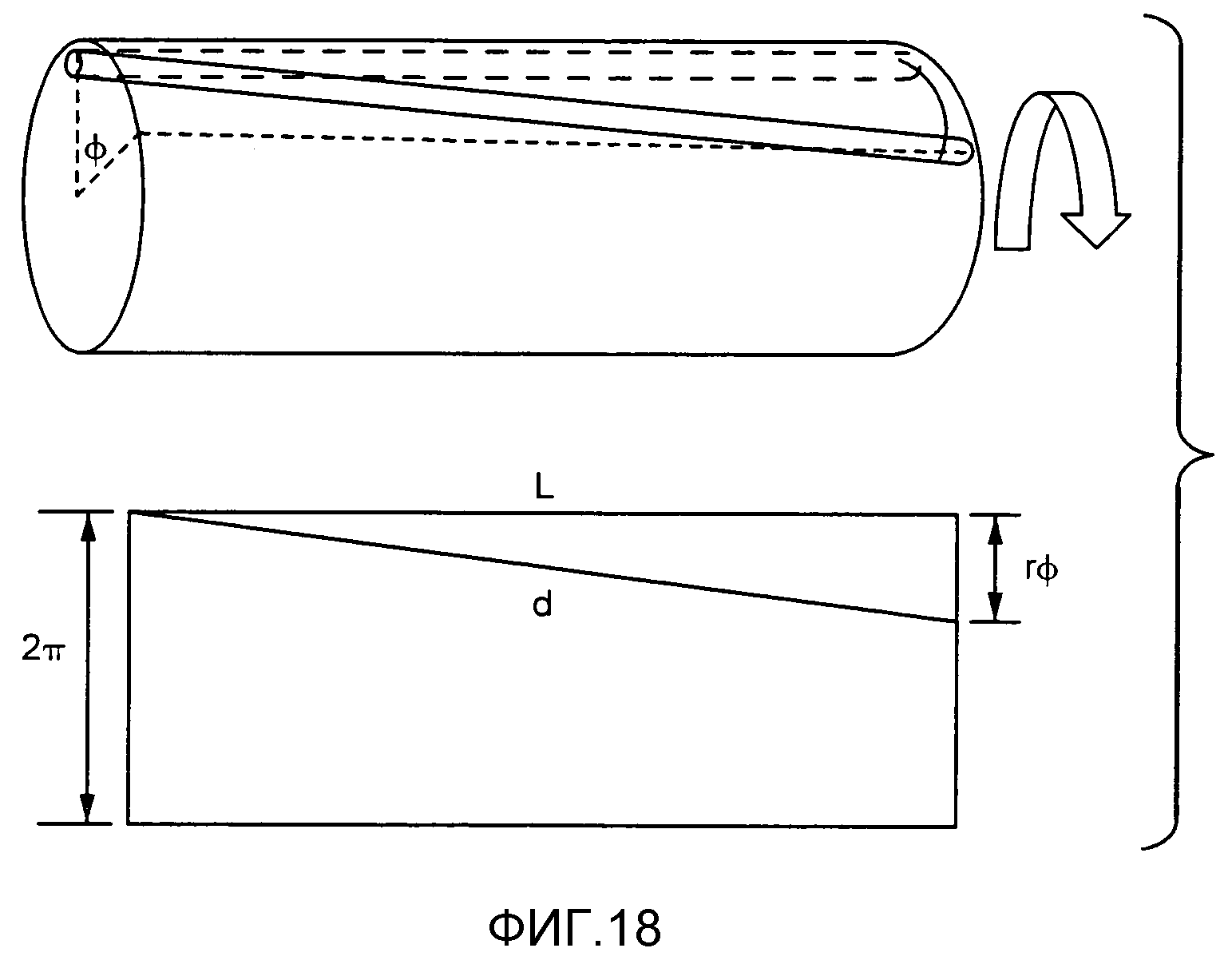
фиг. 18 показывает внешнюю жилу, которая испытывает скручивание, смоделированную в качестве сплющенного цилиндра, в то время как он перемещается вдоль поверхности;
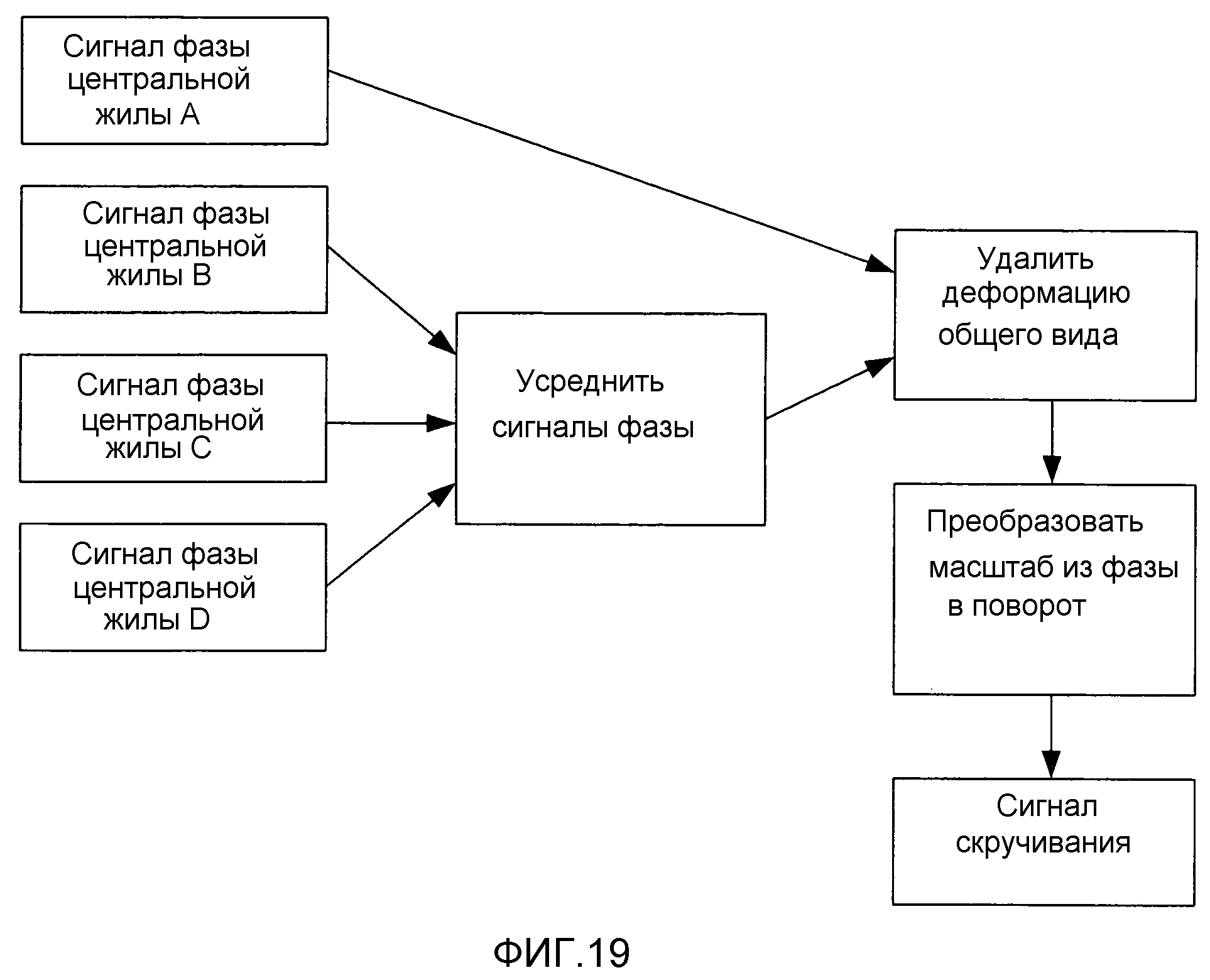
фиг. 19 - блок-схема последовательности операций способа, иллюстрирующая неограничивающие примерные процедуры для расчета внешнего скручивания вдоль волокна;
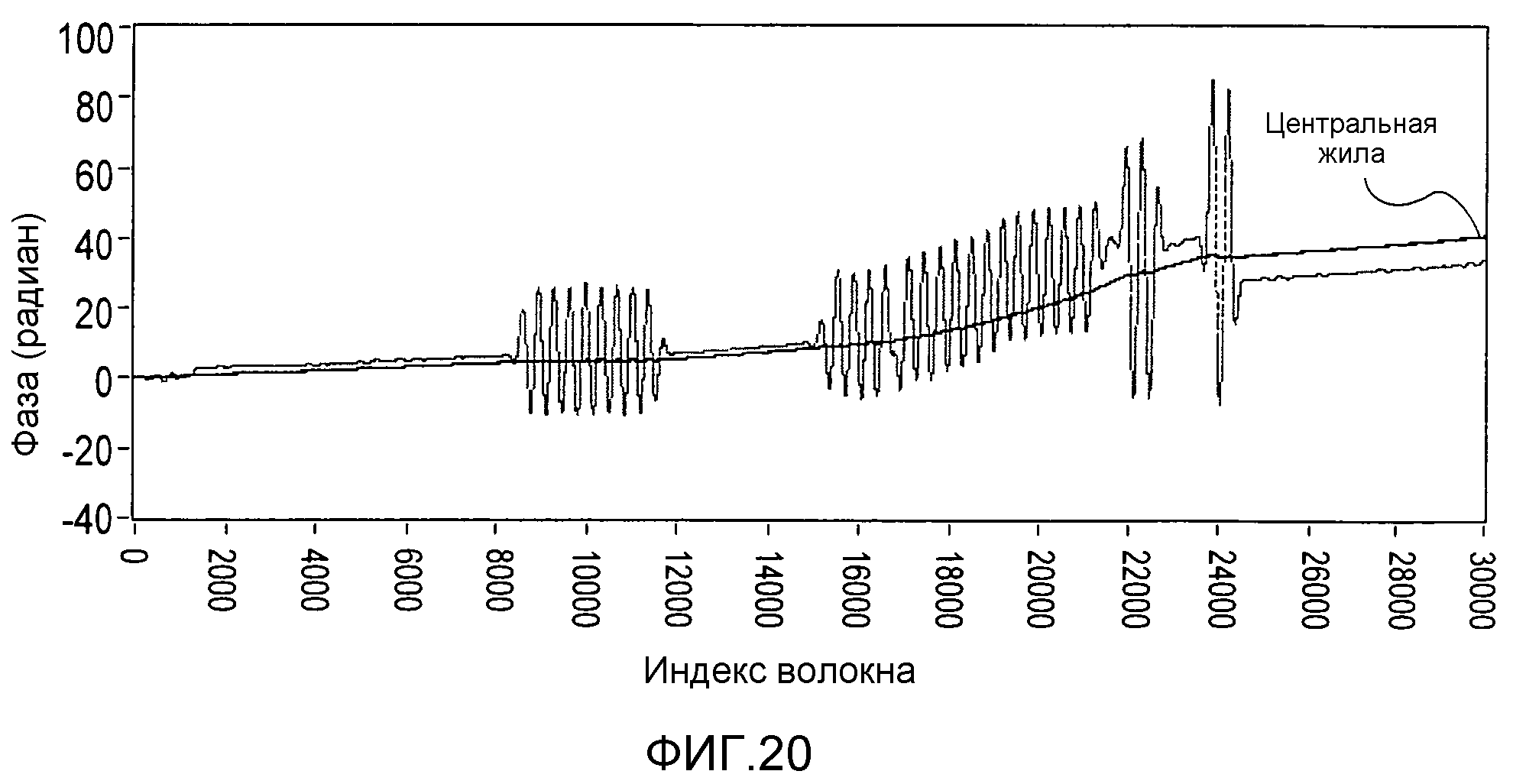
фиг. 20 показывает примерный набор данных для обобщенной формы, которая иллюстрирует процедуры фиг. 19 более подробно;
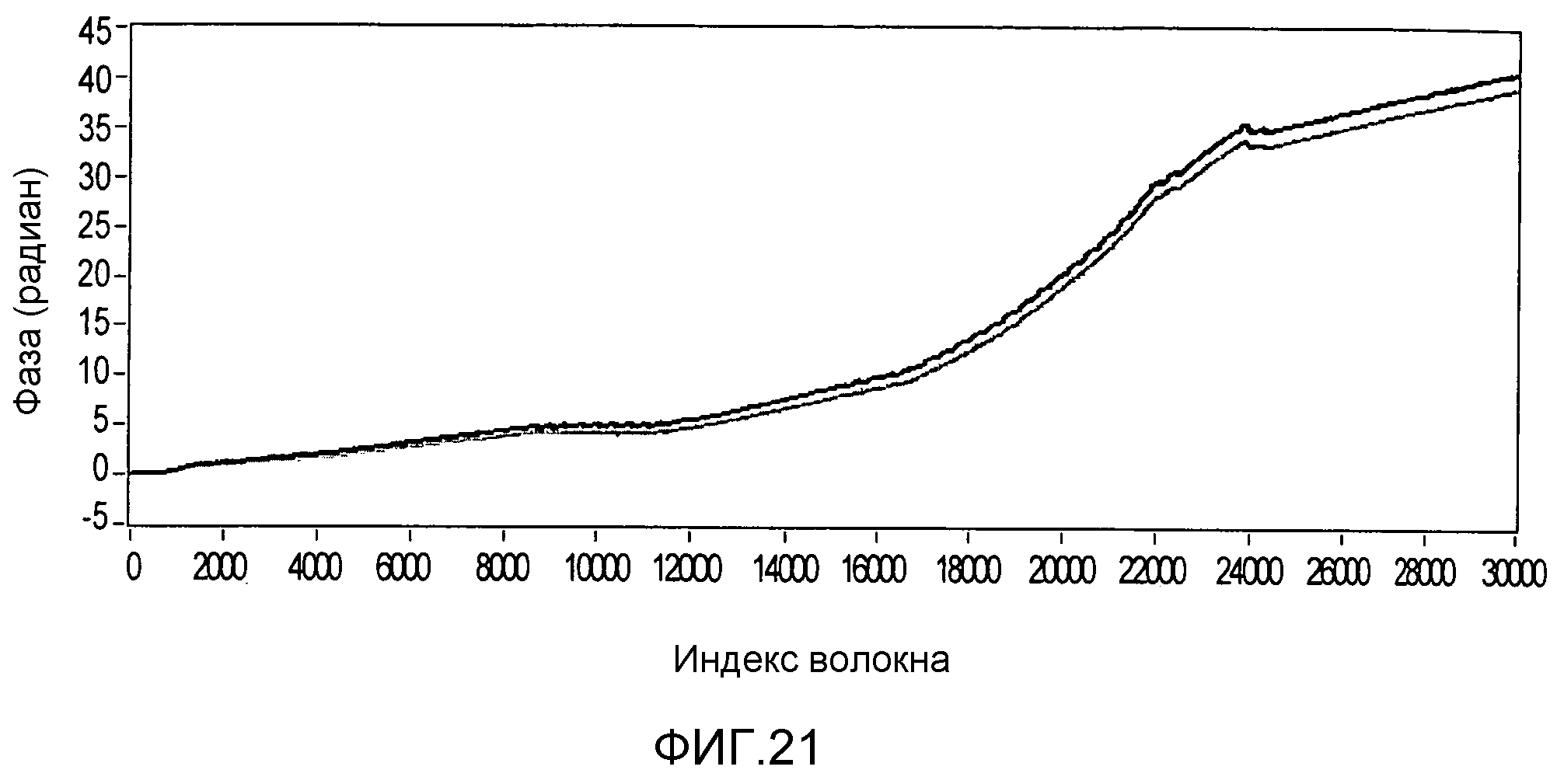
фиг. 21 - график, который показывает незначительное отклонение между двумя фазовыми кривыми;
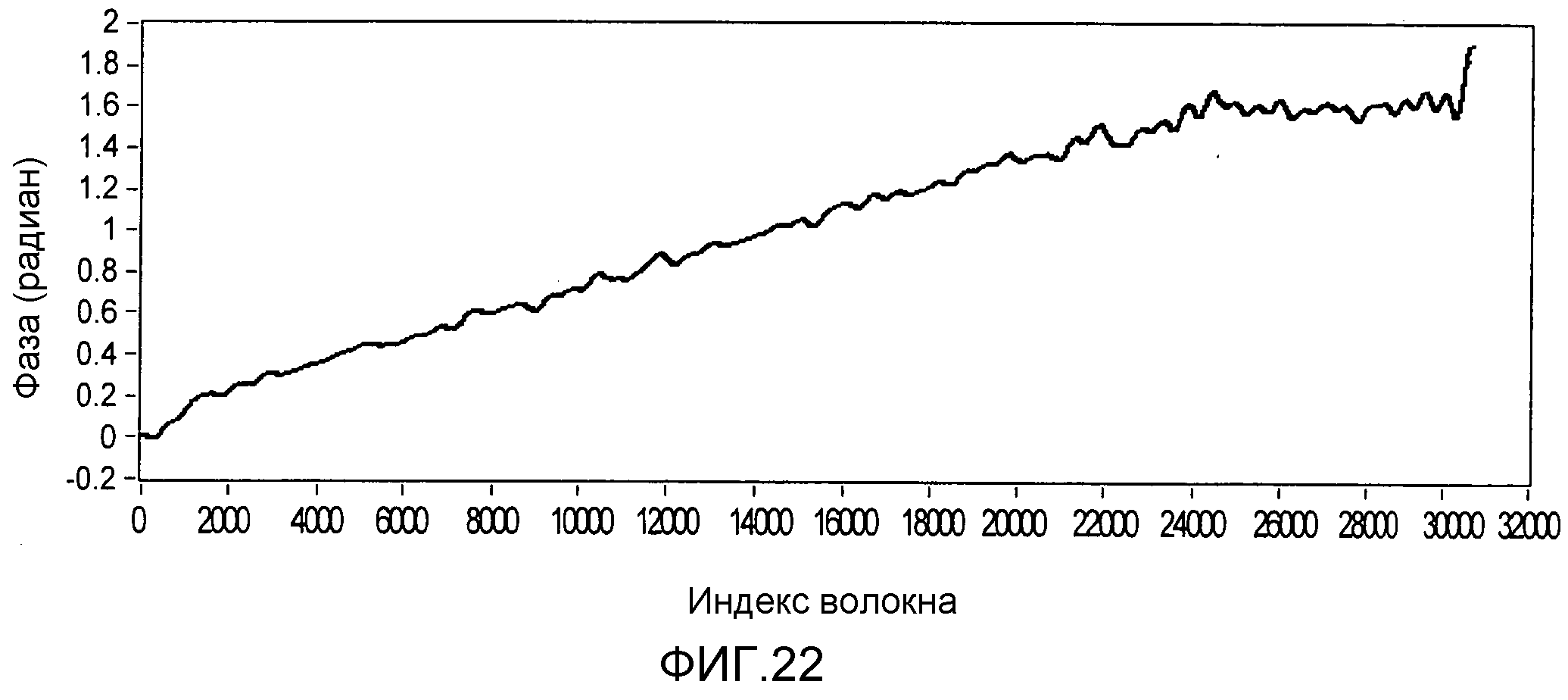
фиг. 22 - график, иллюстрирующий сигнал скручивания, вырабатываемый по фиг. 21;
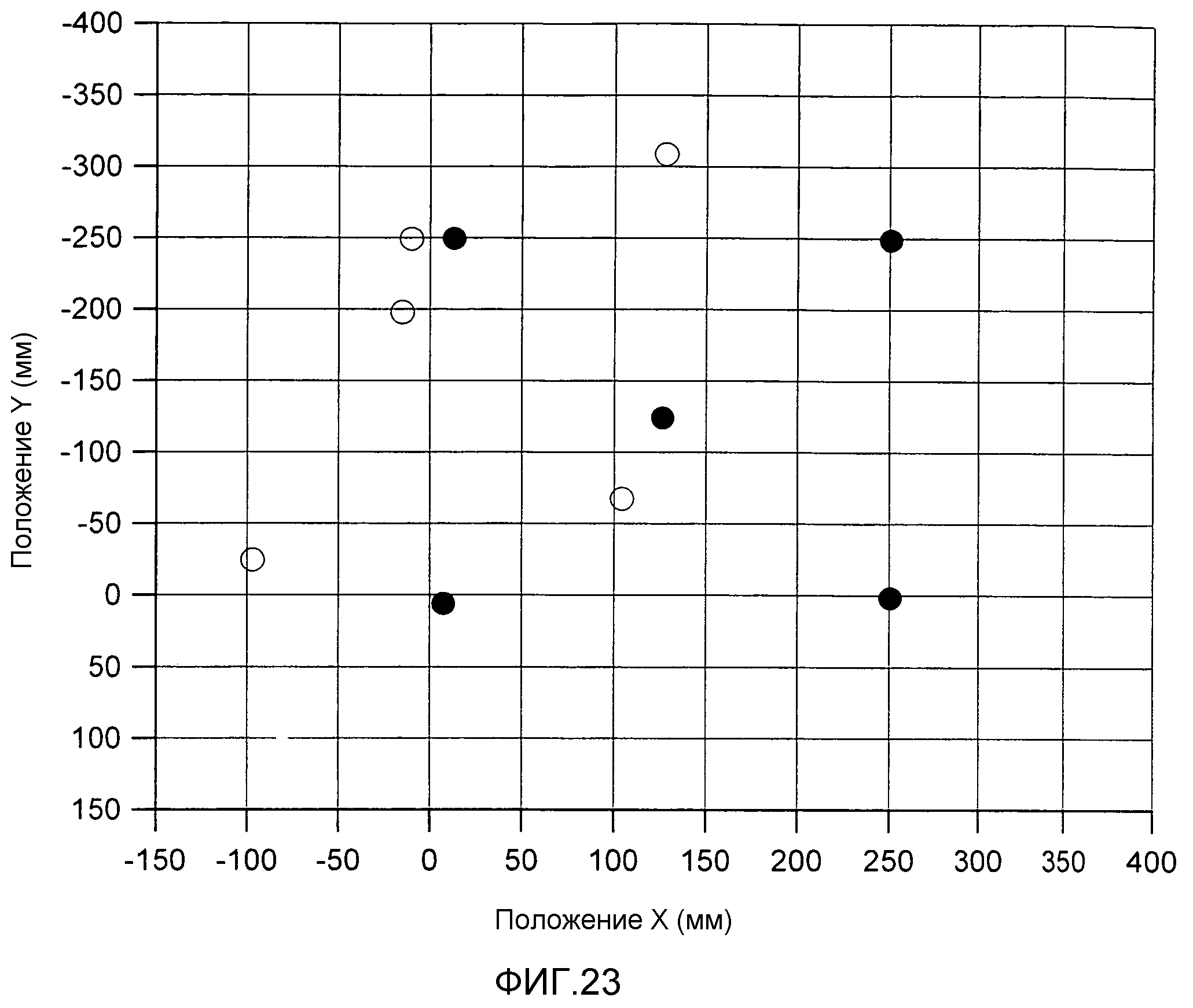
фиг. 23 иллюстрирует необходимость компенсации скручивания при расчете формы;
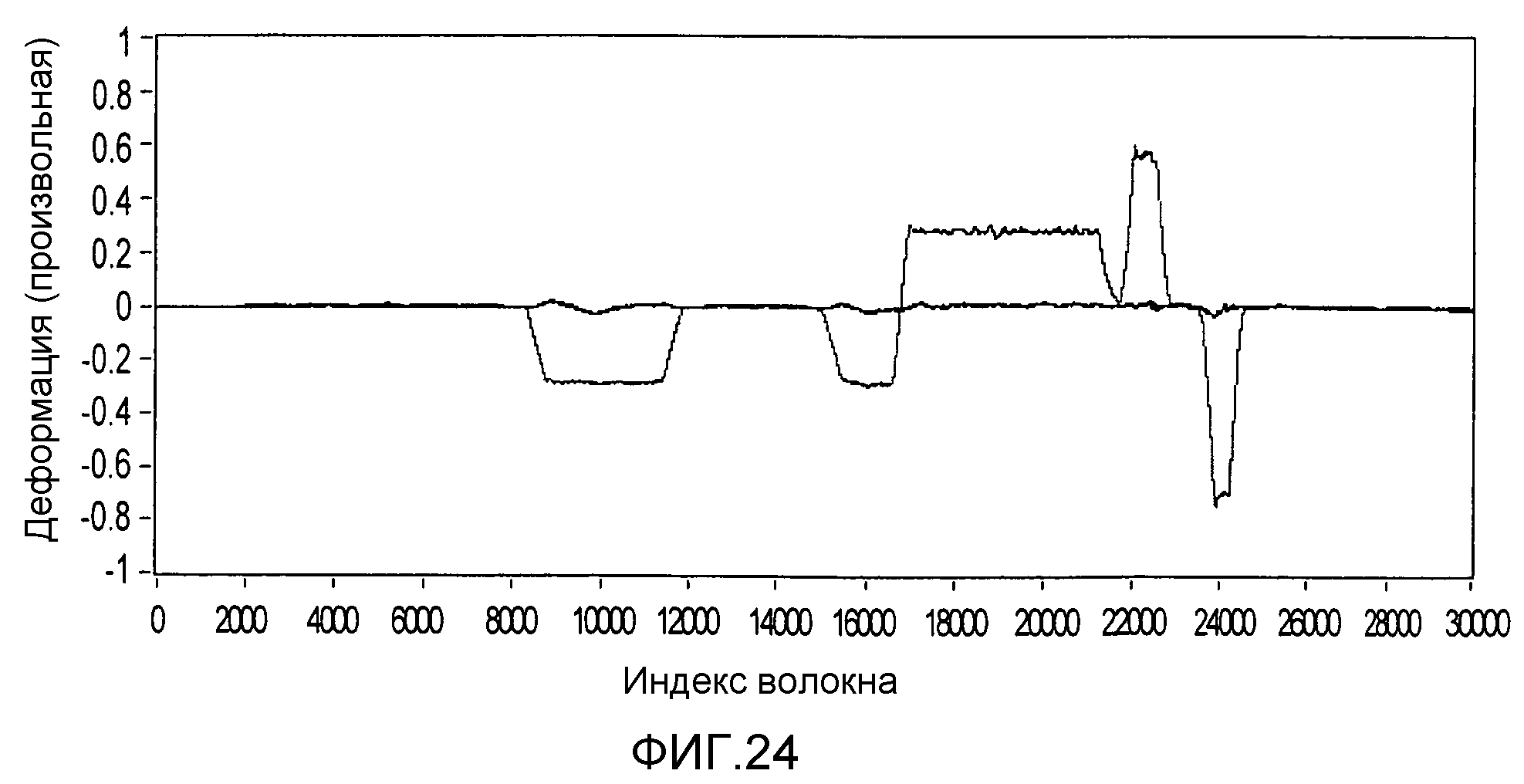
фиг. 24 изображает примерные кривые ортогональной деформации для волокна, размещенного в нескольких изгибах, которые все возникают в одной и той же плоскости;
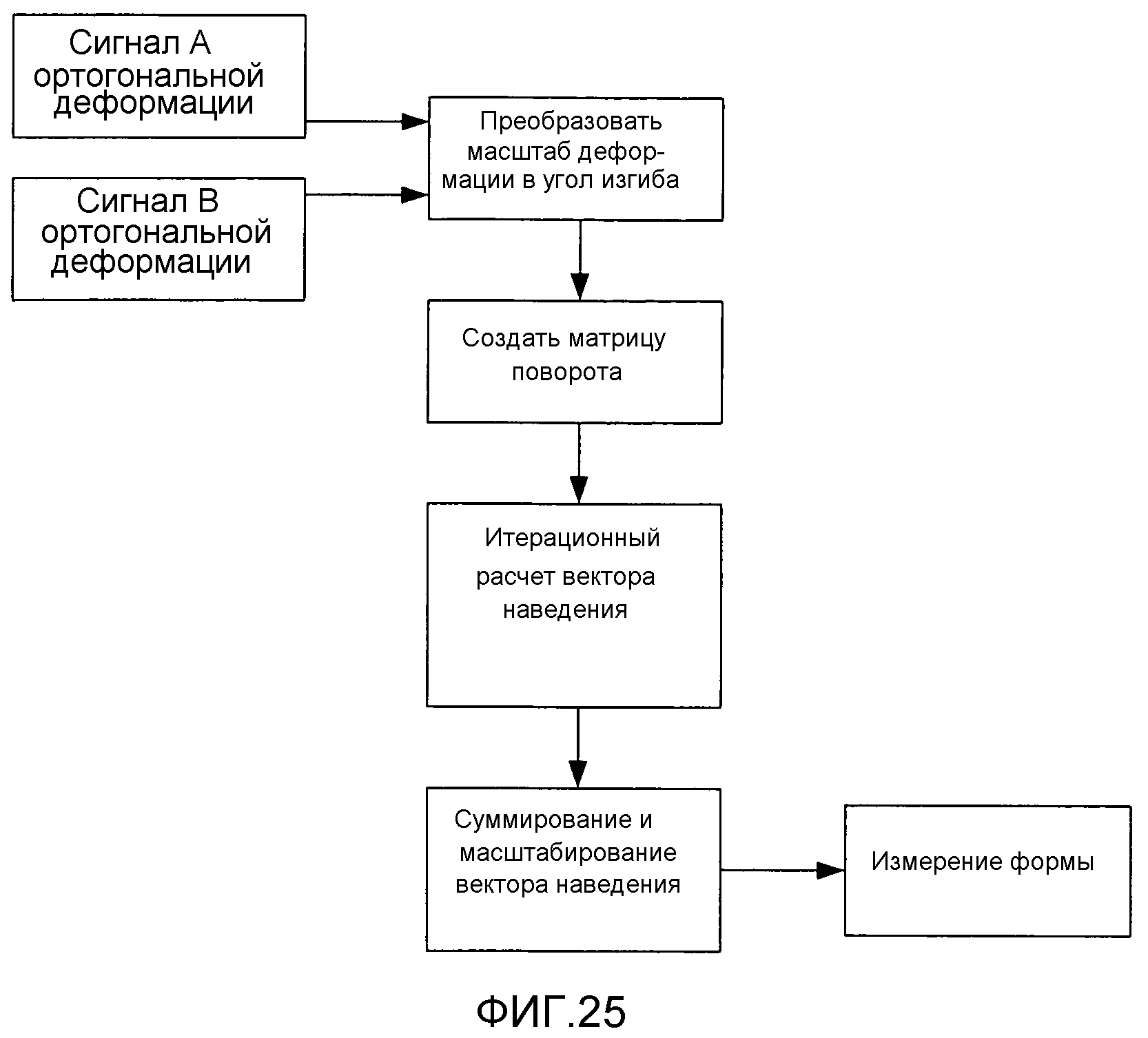
фиг. 25 показывает блок-схему последовательности операций способа, описывающую неограничивающие примерные этапы для расчета формы по деформации;
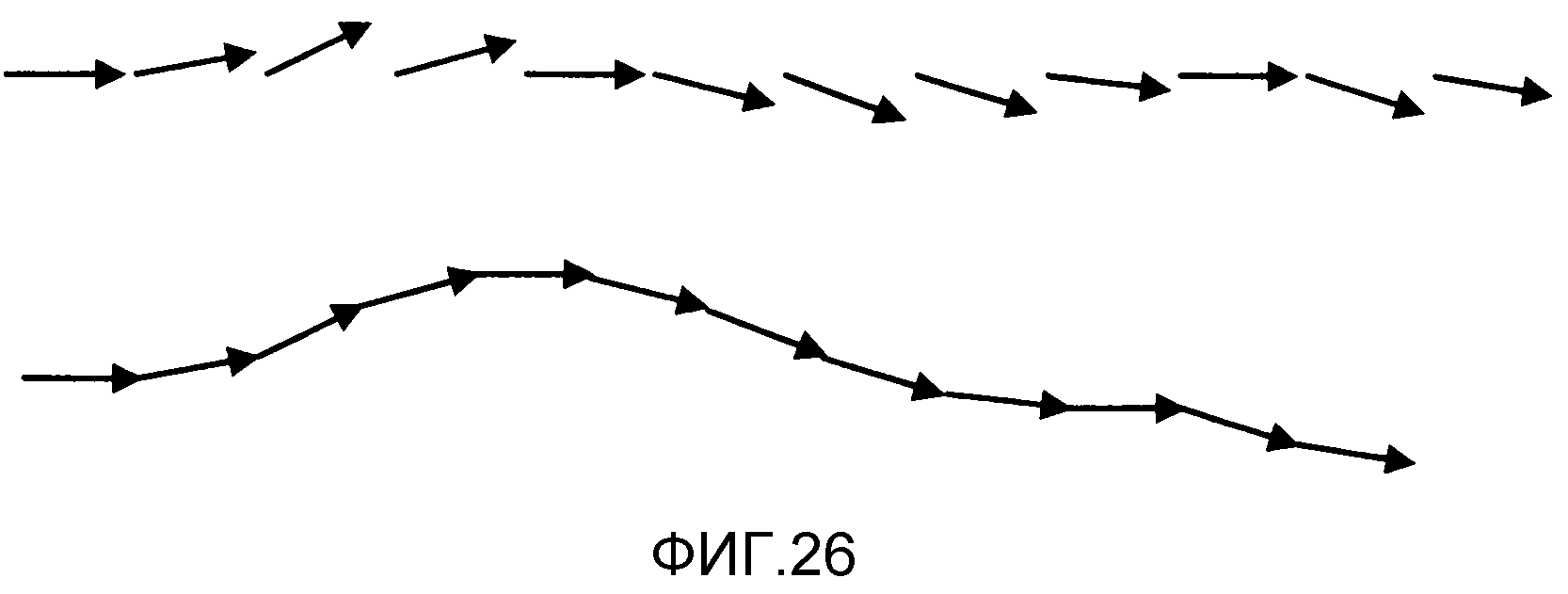
фиг. 26 иллюстрирует, что если каждый из многочисленных векторов наведения размещен головной частью к хвостовой части, результатом является точное измерение формы;
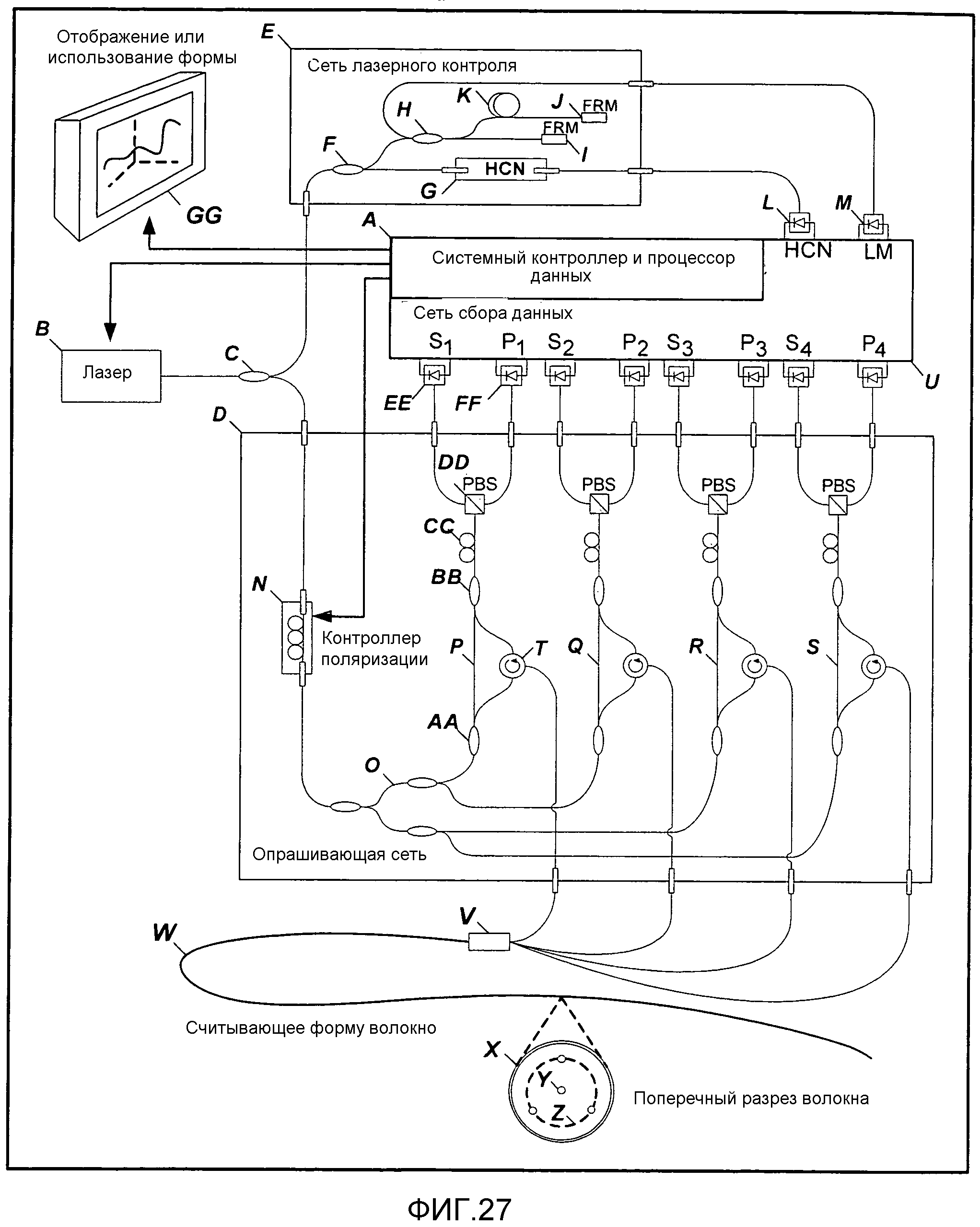
фиг. 27 - неограничивающая примерная система измерения положения и формы;
фиг. 28 - блок-схема последовательности операций способа, иллюстрирующая неограничивающие примерные этапы для расчета поправки на двулучепреломление;
фиг. 29 показывает профиль вызванной изгибом деформации поперечного разреза измеряющего форму волокна;
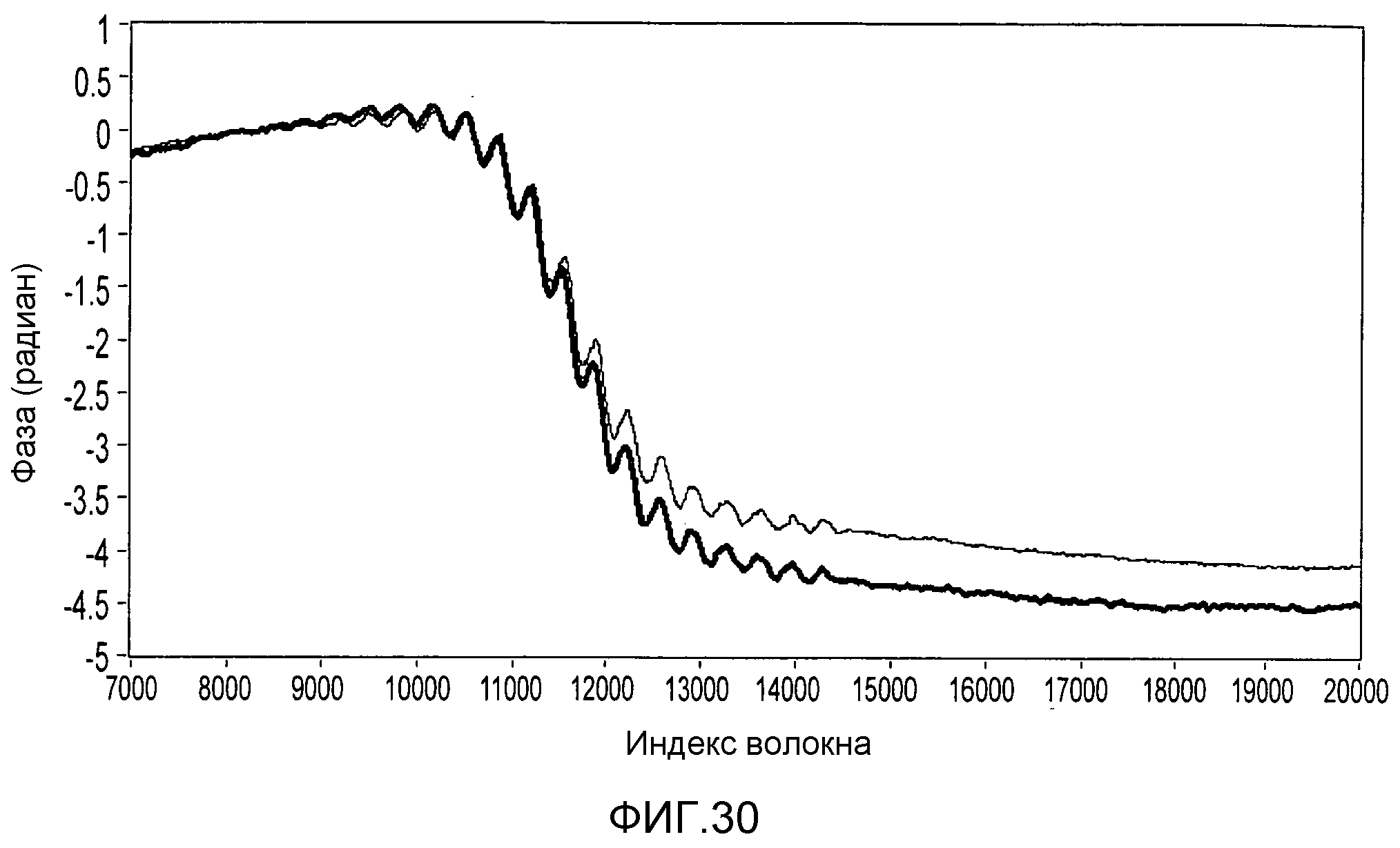
фиг. 30 показывает два графика фазы, сравнивающие сигнал фазы центральной жилы со средней фазой внешних жил;
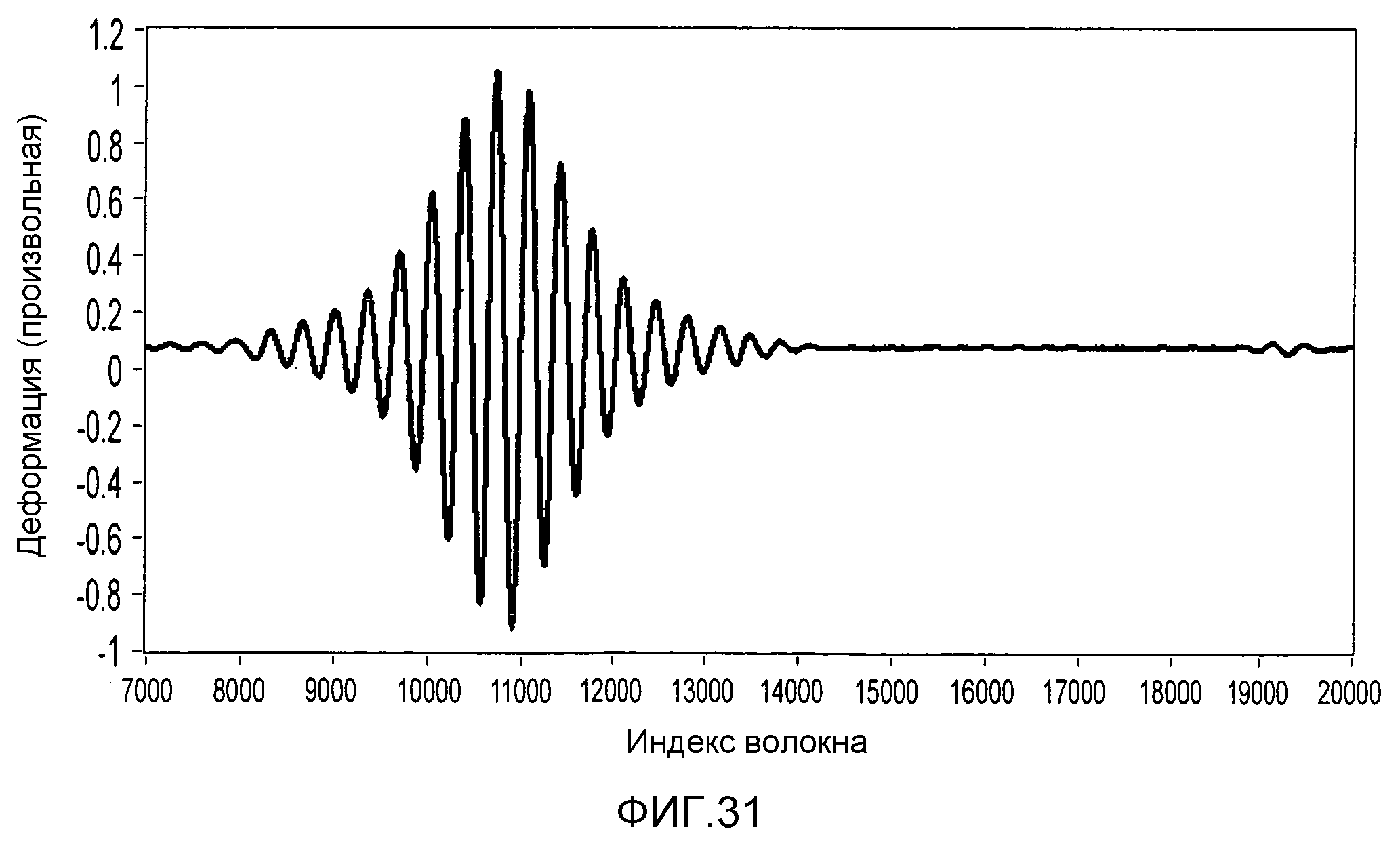
фиг. 31 показывает примерную характеристику деформации для внешней жилы для петли волокна диаметром 40 мм;
фиг. 32 - график, показывающий поправку вызванного изгибом двулучепреломления для петли волокна диаметром 40 мм;
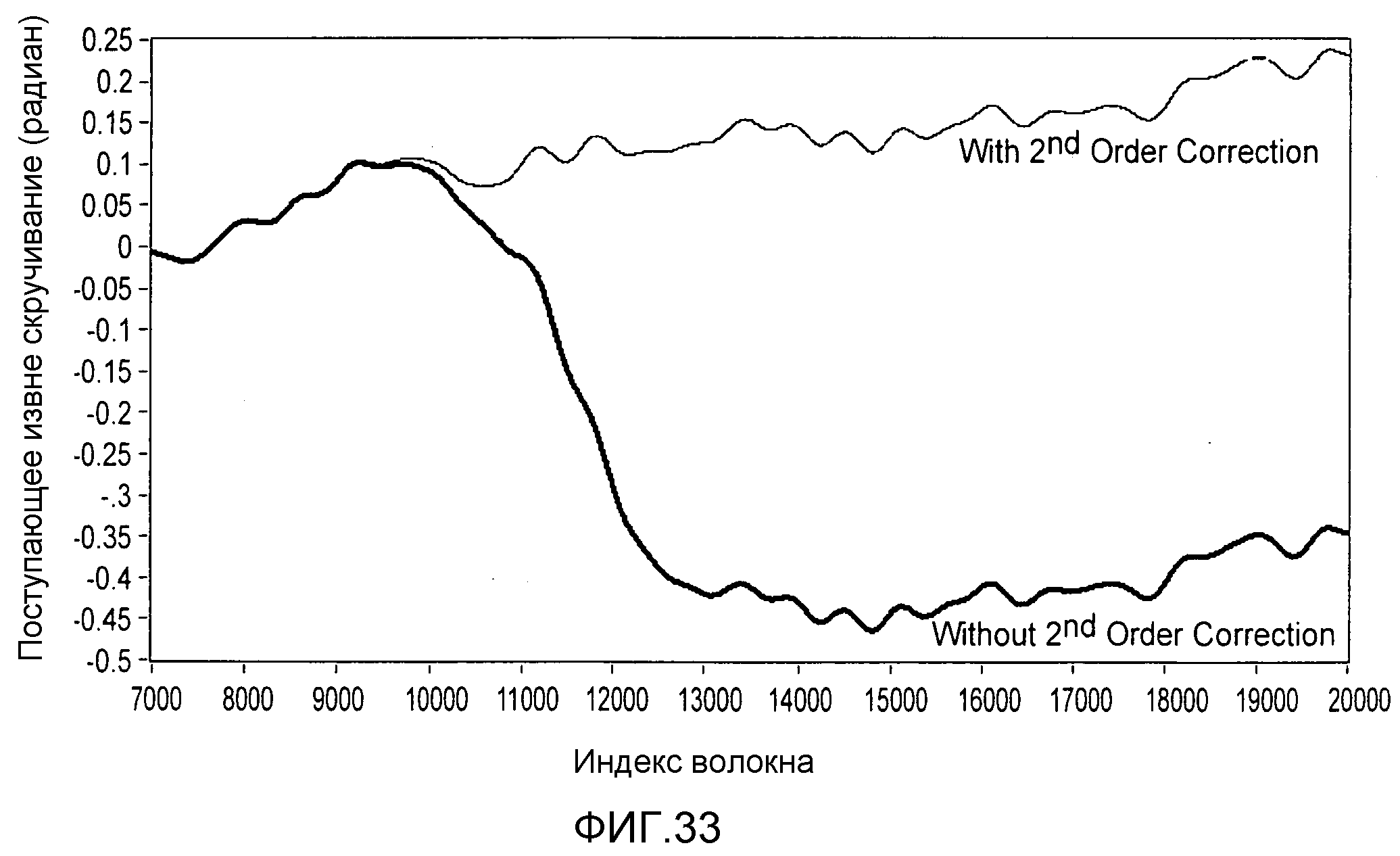
фиг. 33 - график, сравнивающий сигнал скручивания с и без поправки на двулучепреломление 2-го порядка;
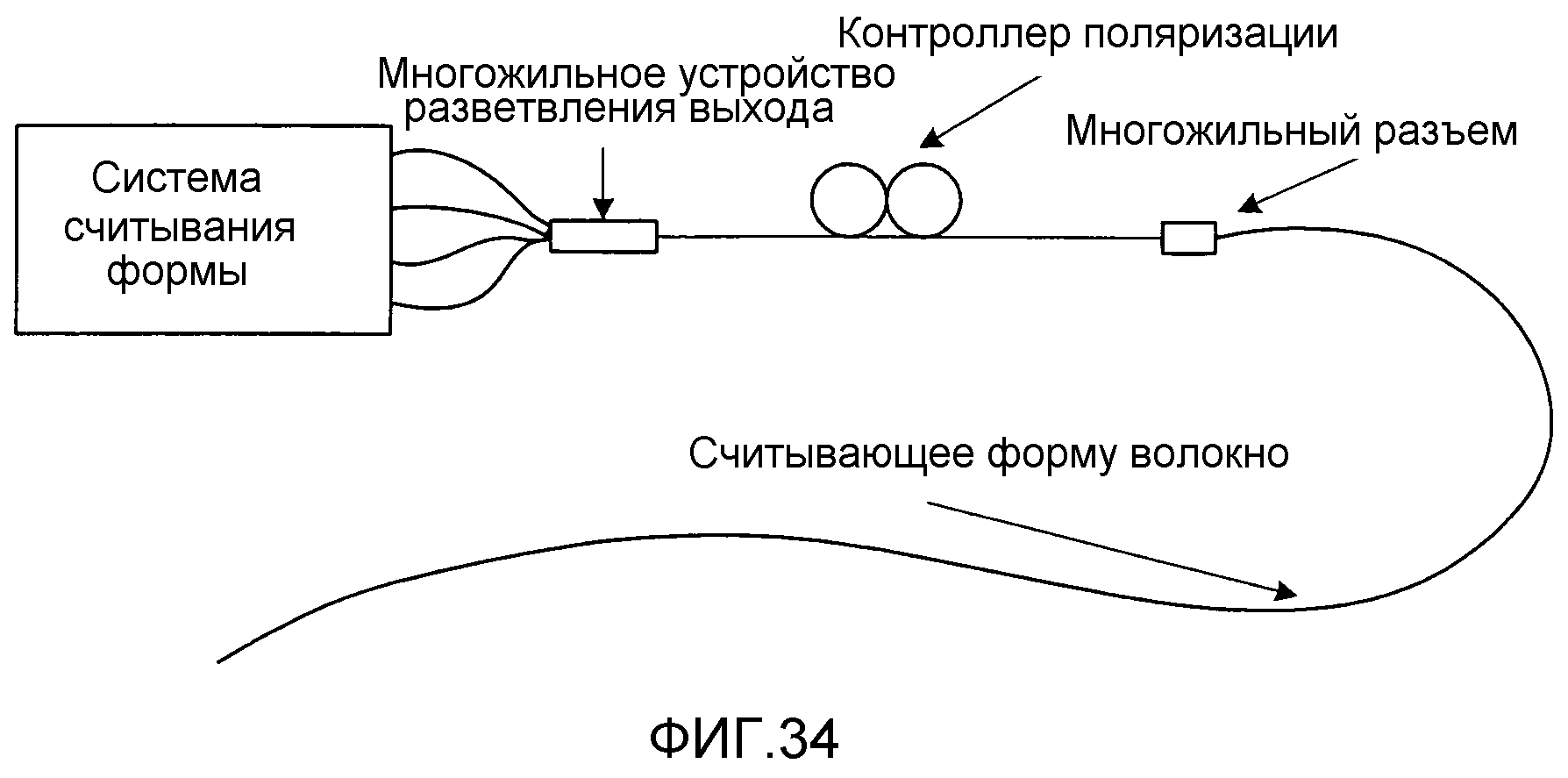
фиг. 34 показывает неограничивающий примерный контроллер поляризации петли между измеряющим форму волокном и системой измерения положения и формы;
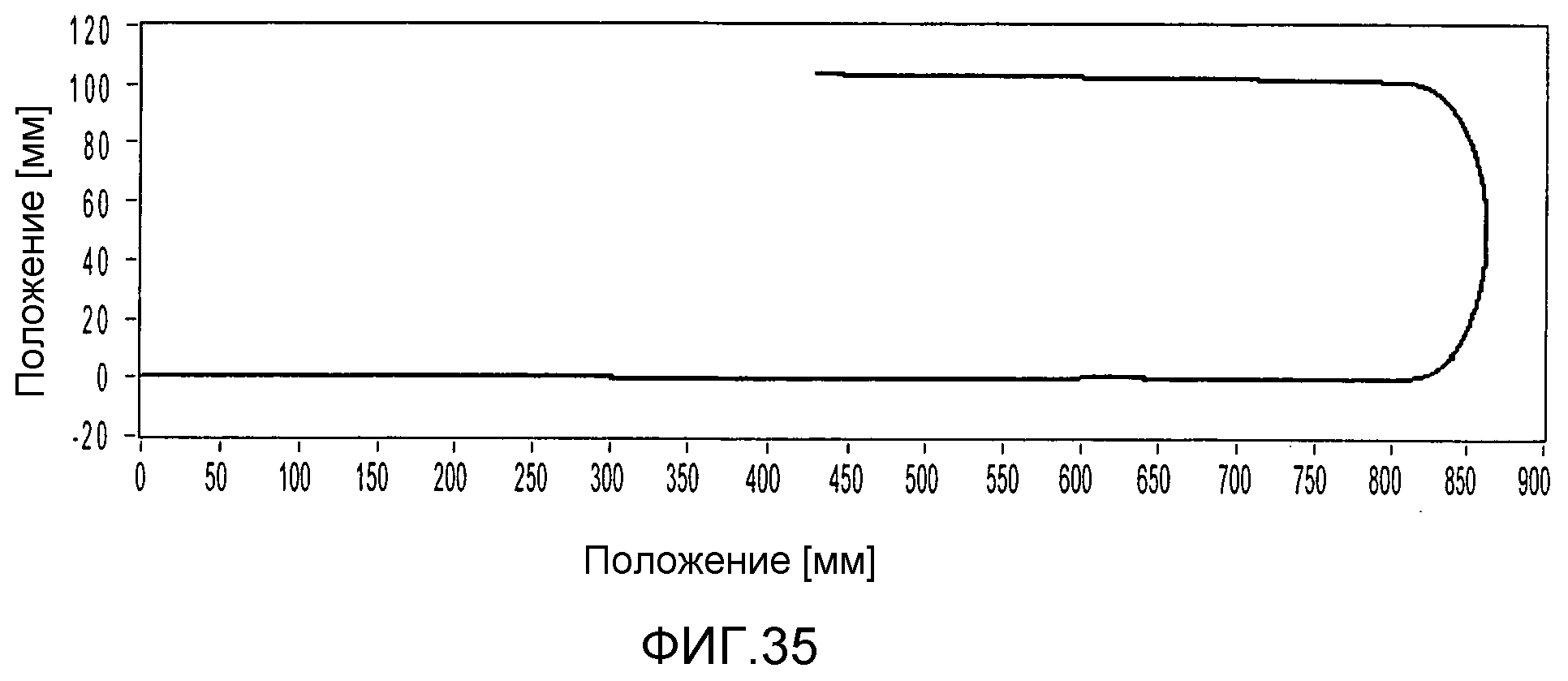
фиг. 35 показывает сигнал в плоскости для относительно простой формы, где 1,4 метра измеряющего форму волокна проведены через одиночный поворот 180 градусов с радиусом изгиба 50 мм;
фиг. 36 показывает три следующих один за другим измерения вне плоскости, где между каждым измерением поляризация меняется с использованием контроллера поляризации;
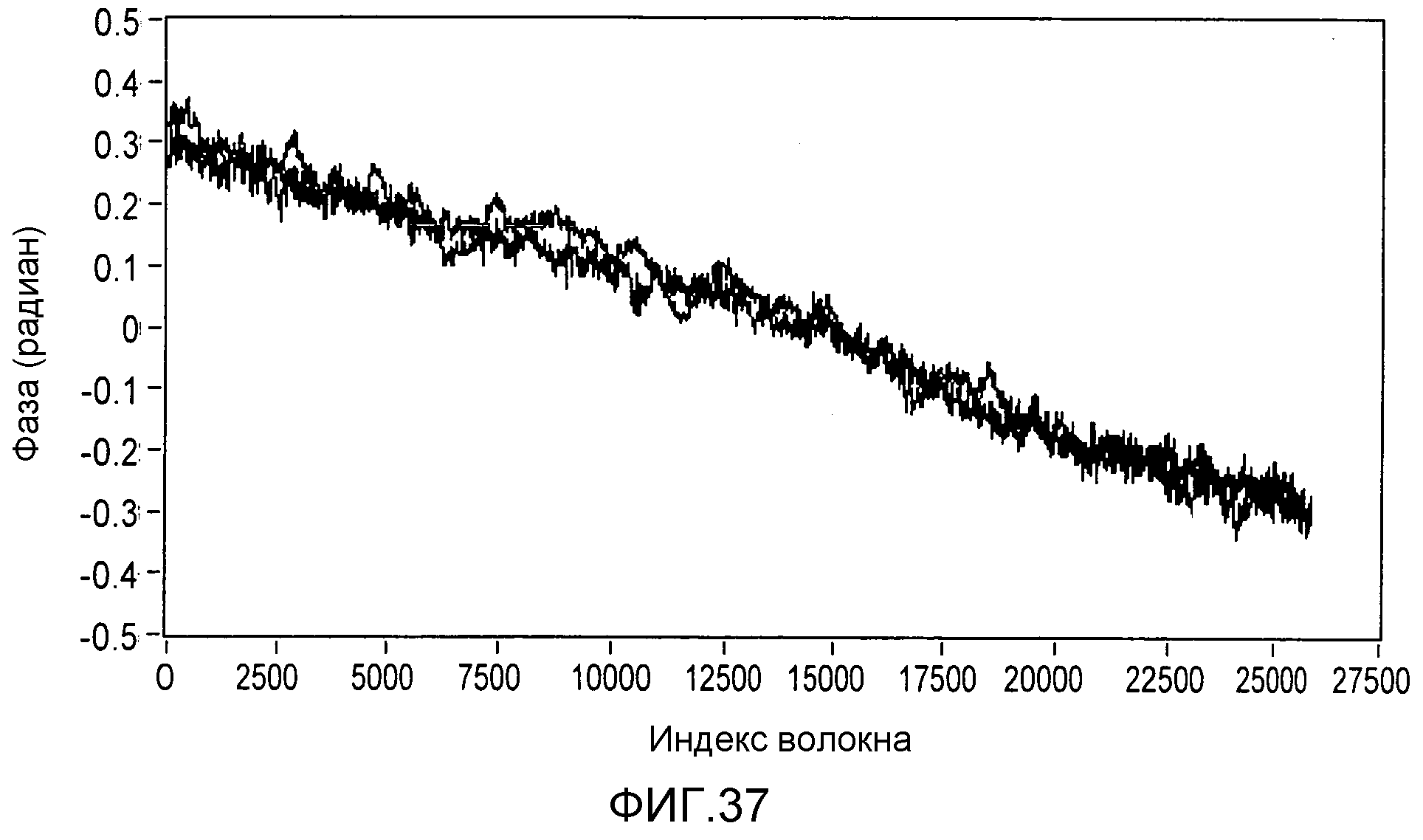
фиг. 37 - график, показывающий пример, что два следующих один за другим измерения центральной жилы с разными состояниями входной поляризации не имеют значительного отклонения в фазовой характеристике;
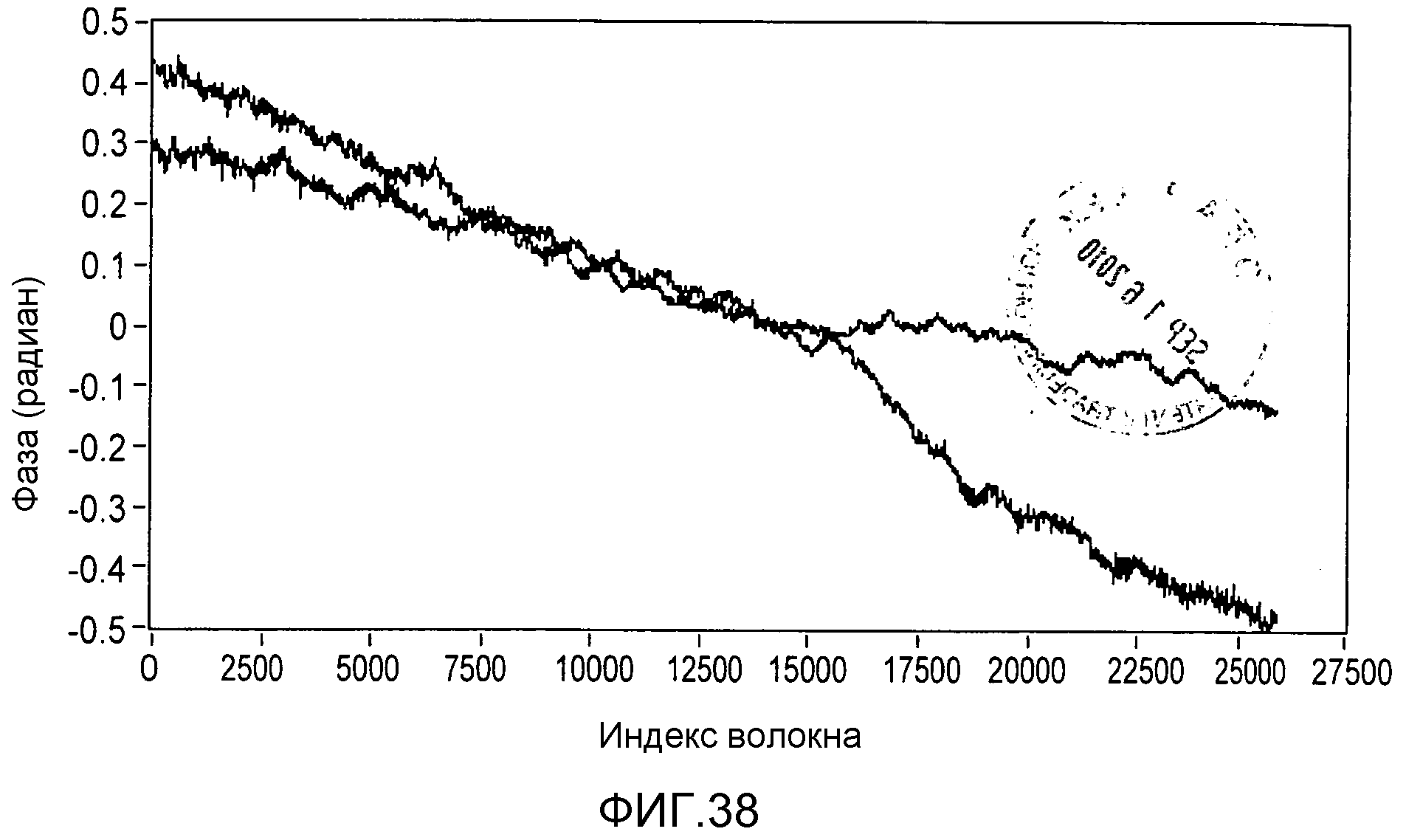
фиг. 38 - график, показывающий пример, что два следующих один за другим измерения внешней жилы реагируют по-разному на входную поляризацию, свидетельствуя о двулучепреломлении в измеряющем форму волокне;
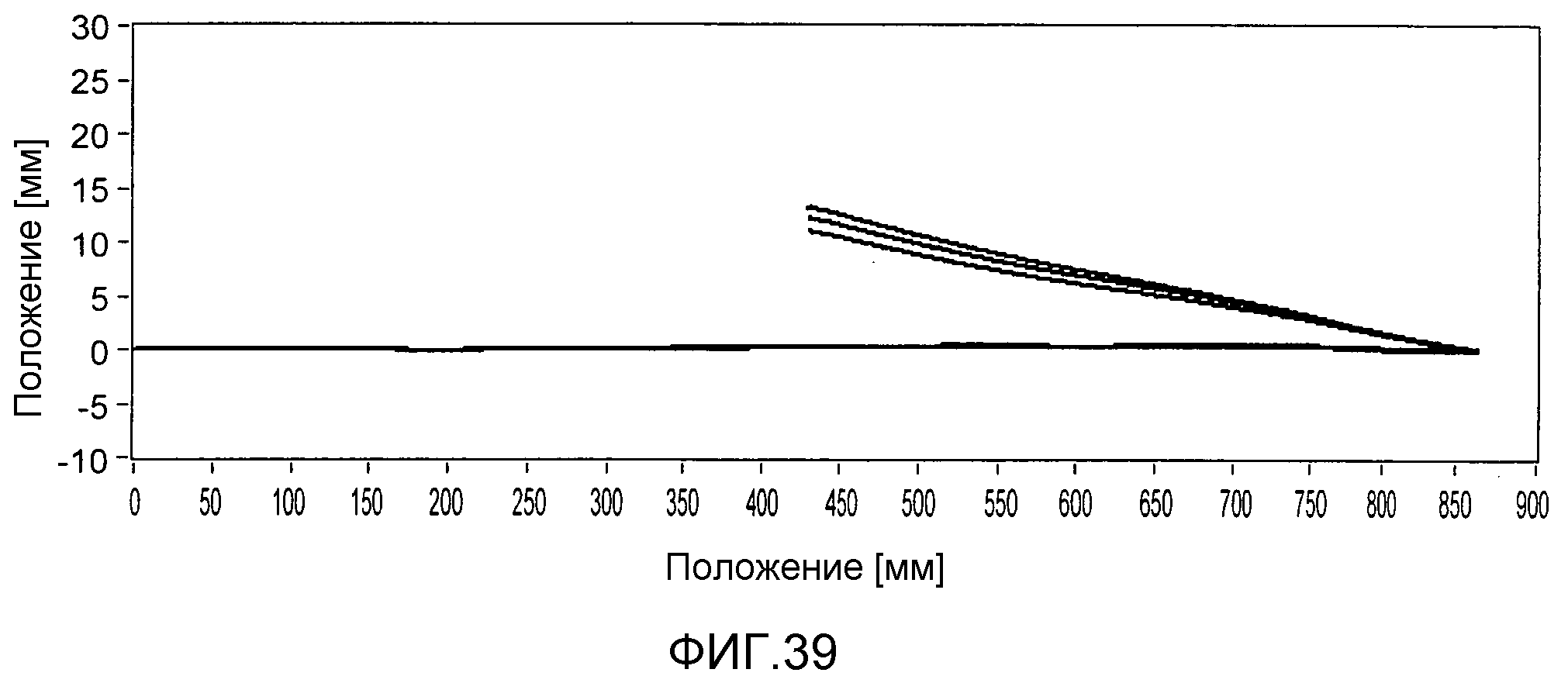
фиг. 39 - график, показывающий, что внесение поправки на двулучепреломление улучшало точность системы; и
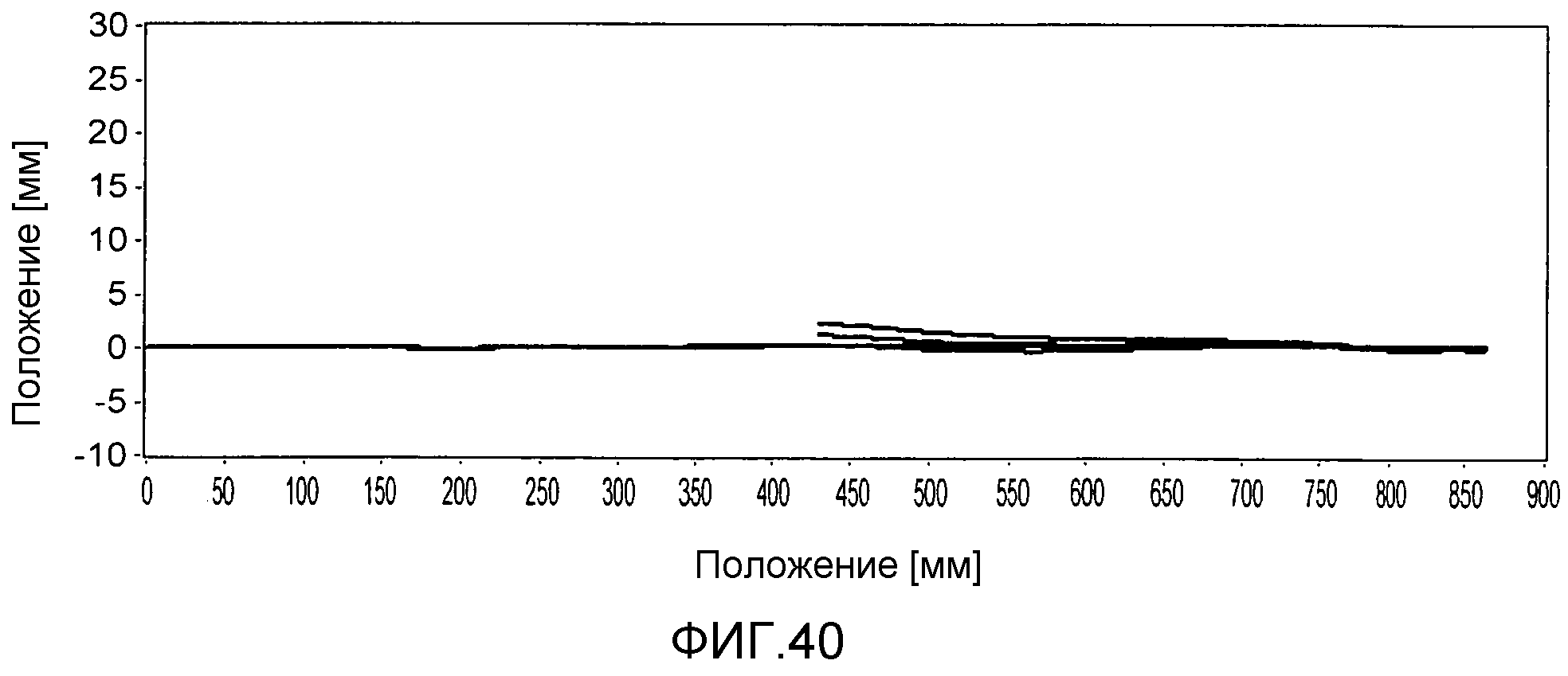
фиг. 40 - график, показывающий, что внесение поправки на двулучепреломление как первого, так и второго порядка улучшало точность и прецизионность системы.
ПОДРОБНОЕ ОПИСАНИЕ
В последующем описании, в целях пояснения, а не ограничения, изложены специфичные детали, такие как конкретные узлы, функциональные сущности, технологии, протоколы, стандарты и т.д., для того чтобы обеспечить понимание описываемой технологии. Специалисту в данной области техники будет очевидно, что другие варианты осуществления могут быть осуществлены на практике, кроме специфичных деталей, раскрытых ниже. В других случаях, подробные описания широко известных способов, устройств, технологий и т.д., опущены, с тем чтобы не усложнять описание излишней детализацией. Отдельные блоки функций показаны на фигурах. Специалисты в данной области техники будут принимать во внимание, что функции этих блоков могут быть реализованы с использованием отдельных аппаратных схем, с использованием программно реализованных программ и данных, в соединении с надлежащим образом запрограммированным микропроцессором или компьютером общего назначения, с использованием специализированной интегральной микросхемы (ASIC), и/или с использованием одного или более цифровых сигнальных процессоров (ЦСП, DSP). Команды программно реализованной управляющей программы и данные могут храниться на машинно-читаемом запоминающем носителе и, когда команды выполняются компьютером или другим пригодным процессорным элементом управления, компьютер или процессор выполняет функции.
Таким образом, например, специалистами в данной области техники будет приниматься во внимание, что структурные схемы в материалах настоящей заявки могут представлять собой концептуальные представления иллюстративных схем или других функциональных блоков, воплощающих принципы технологии. Подобным образом, будет приниматься во внимание, что любые блок-схемы последовательностей операций способов, диаграммы переходов, псевдокод и тому подобное олицетворяют различные последовательности операций, которые, по существу, могут быть представлены на машиночитаемом носителе и, значит, выполняться компьютером или процессором, показан или нет такой компьютер или процессор явным образом.
Функции различных элементов, включающих в себя функциональные блоки, в том числе, но не в качестве ограничения, отмеченные или описанные в качестве «процессора» или «контроллера», могут обеспечиваться благодаря использованию аппаратных средств, таких как схемные аппаратные средства и/или аппаратные средства, способные к выполнению программного обеспечения в виде кодированных команд, хранимых на машиночитаемом носителе. Таким образом, такие функции и проиллюстрированные функциональные блоки должны пониматься в качестве являющихся аппаратно-реализованными и/или реализованными компьютером и, таким образом, машинно-реализованными.
С точки зрения аппаратной реализации, функциональные блоки могут включать в себя или охватывать, без ограничения, аппаратные средства цифрового сигнального процессора (ЦСП), процессор с сокращенным набором команд, аппаратные (например, цифровые или аналоговые) схемы, в том числе, но не в качестве ограничения, специализированную интегральную схему(ы) (ASIC) и (где надлежит) конечные автоматы, способные к выполнению таких функций.
С точки зрения компьютерной реализации, компьютер обычно понимается содержащим один или более процессоров или один или более контроллеров, и термины компьютер и процессор, а также контроллер, могут применяться в материалах настоящей заявки взаимозаменяемо. Когда предусмотрены компьютером или процессором, либо контроллером, функции могут обеспечиваться одиночным выделенным компьютером или процессором либо контроллером, одиночным совместно используемым компьютером или процессором либо контроллером, или множеством отдельных компьютеров или процессоров либо контроллеров, некоторые из которых могут быть совместно используемыми или распределенными. Более того, использование термина «процессор» или «контроллер» также должно истолковываться указывающим на другое аппаратное обеспечение, способное к выполнению таких функций и/или исполнению программного обеспечения, такое как примерное аппаратное обеспечение, изложенное выше.
ОТСЛЕЖИВАНИЕ ФАЗЫ ДЛЯ ПОВЫШЕННОЙ УГЛОВОЙ ТОЧНОСТИ
Фиг. 1 показывает поперечный разрез примерного многожильного волокна 1, которое включает в себя центральную жилу 2 и три периферийных жилы 3, 4 и 5, окруженных оболочкой 6. Эти жилы 3-5, показанные в этом примере, разнесены на приблизительно 120 градусов.
Считывание (измерение) формы в многожильном волокне предполагает, что расстояния между жилами в волокне остаются постоянными, при наблюдении в поперечном разрезе, независимо от формы волокна. Это предположение часто действительно, так как стекло является очень жестким и очень упругим. Кроме того, поперечный разрез волокна (например, ~125 микрон) является небольшим по сравнению с размерами изгибов, испытываемых волокном (например, радиусами изгиба, большими, чем 5 мм). Это поддержание положения жил в поперечном разрезе подразумевает, что вся деформация волокна должна обеспечиваться растяжением или сжатием жил. Как показано на фиг. 2, когда волокно изогнуто, жила на наружной стороне 7 изгиба будет растягиваться наряду с тем, что жила на внутренней стороне 8 изгиба будет испытывать сжатие.
Поскольку предполагается, что средняя длина сегмента оптического волокна должна оставаться неизменной, тесты по геометрии показываю, что изменение направления наведения (то есть, вектора, который описывает положение центральной оси сегмента оптоволокна) может рассчитываться на основании изменения длин жил и расстояния между жилами. Должны приниматься во внимание другие эффекты, такие как оптический коэффициент деформации. Результат состоит в том, что изменение направления наведения для данного сегмента волокна является прямо пропорциональным разнице изменений длины в жилах в пределах такого сегмента.
Фиг. 3 показывает, что изгиб в оптоволокне


Вышеприведенное уравнение описывает изменение угла для данного сегмента волокна, и каким образом оно имеет отношение к изменению деформации. С перемещением к следующему сегменту в волокне, изменение угла предыдущего сегмента должно быть прибавлено к следующему изменению угла для следующего сегмента для расчета текущего направления наведения волокна. В двух измерениях, все из предыдущих углов могут накапливаться, чтобы находить угол изгиба в любом конкретном местоположении вдоль волокна. Фиг. 4 показывает, что угол изгиба в любой точке или местоположении вдоль волокна может определяться суммированием всех углов, приводящих в такую точку, например,

Чтобы избежать этой накопленной погрешности измерения углов, изобретатели задумались скорее о непосредственном измерении изменения длины сегмента, чем измерении деформации. Математически, суммирование углов в таком случае становится суммированием изменений длины вдоль волокна, как показано в уравнении (2), где L соответствует длине волокна.

Таким образом, угол в любом положении Z вдоль волокна, в таком случае, становится линейно пропорциональным разности между суммарными изменениями длины жил вплоть до такого положения, как показано в уравнении (3).

Поэтому, если суммарное изменение длины вдоль волокна может непрерывно точно отслеживаться, предпочтительнее, чем суммирование каждого отдельного локального изменения деформации, угловая погрешность может предохраняться от возрастания. Далее будет показано, как можно отслеживать изменение длины жилы с лучшей точностью, чем 10 нм, и поддерживать эту точность по всей длине волокна. Этот уровень точности дает 0,3 градуса угловой точности при 70 микронах разнесения между жилами и, теоретически, около 0,5% точности положения по длине оптоволокна.
К сожалению, суммарная зависимость, определенная в (3), не сохраняется в трех измерениях. Однако большинство трехмерных форм могут быть точно представлены в качестве непрерывного ряда двухмерных кривых, и, при наличии небольших угловых изменений (<10 градусов), трехмерные углы также имеют эту простую суммарную зависимость. Как следствие, этот подход полезен для оценки вкладов погрешности в трех измерениях.
Понимание, представленное этим геометрическим заключением, состоит в том, что суммарное изменение длины в качестве функции расстояния вдоль многожильного волокна используется предпочтительнее, чем локальная деформация. Другими словами, относительно большие погрешности в измеренных значениях локальной деформации могут допускаться до тех пор, пока интеграл измеренной деформации, соответствующей суммарному изменению длины вплоть до такой точки, остается точным. Точности нанодеформаций достигаются без требования чрезвычайно больших отношений сигнал/шум, в то время как расстояния, на которых рассчитываются нанодеформации, относительно велики (например, многие сантиметры, такие как 10-1000 см). Как пояснено позже в описании, отслеживание изменения длины также может использоваться для оценки поворота по длине волокна, предоставляя возможность более высоких точностей, чем ожидаемые точности, которые должны достигаться при измерении катушки волокна или также угла поворота вокруг оси волокна.
ОТСЛЕЖИВАНИЕ ФАЗЫ В ОПТИЧЕСКОМ ВОЛОКНЕ
В качестве датчика, оптическое волокно может выдавать пространственно непрерывные измерения по всей своей длине. Непрерывные измерения важны, так как оптические фазовые сдвиги используются для обеспечения измерений смещения с очень высоким разрешением. Позже пояснено, каким образом внутреннее рассеяние в волокне может использоваться для достижения этого измерения, но концептуально легче начать пояснение с волоконных решеток Брэгга (FBG). Волоконная решетка Брэгга является периодической модуляцией показателя преломления оптоволокна. Каждый период имеет значение приблизительно половины длины волны света в волокне. Длина волны в вакууме света имеет значение около 1550 нм, а его длина волны в оптоволокне имеет значение около 1000 нм. Период решетки, поэтому, имеет значение около 500 нм. Типично, решетка Брэгга используется в качестве датчика посредством измерения ее отраженного спектра. Состояние решетки Брэгга рассчитывается с использованием уравнения, приведенного ниже.
В этом уравнении,


Изображение деформированной решетки Брэгга, показанное на фиг. 5, иллюстрирует локальные изменения показателя преломления в качестве перемежающихся белых и заштрихованных сегментов. При условии идеальной решетки Брэгга, все из периодов идентичны, а фаза картины модуляции увеличивается линейно с перемещением вдоль решетки. Другими словами, скорость изменения фазы с расстоянием обратно пропорциональна периоду решетки. Если растянут небольшой участок решетки, то скорость изменения фазы уменьшается на растянутом участке.
На фиг. 5, верхняя картина изображает неискаженную решетку с идеально линейной фазой в качестве функции положения. Нижняя смещенная картина изображает решетку, искаженную вследствие деформации. Нижний график показывает разность фаз между двумя решетками в каждом местоположении. Искажение в решетке имеет следствием фазовый сдвиг в отраженном сигнале решетки относительно исходной неискаженной фазы. Проиллюстрирован фазовый сдвиг 90 градусов. После деформированного сегмента, скорость изменения возвращается в недеформированное состояние. Однако, фаза в этой области теперь смещена от исходной фазы на величину, равную суммарному изменению фазы в деформированном сегменте. Этот сдвиг фазы прямо пропорционален реальному изменению длины оптического волокна.
Эта иллюстрация показывает только пятнадцать периодов решетки. Поскольку период имеет значение 500 нм, это равняется 7,5 мкм по длине. Растягивание оптоволокна для вынуждения фазового сдвига на 90 градусов смещало оставшиеся недеформированные решетки на четверть периода, или 125 нм. Типичное измерение на основании рефлектометрии в оптической частотной области (OFDR) может иметь пространственное разрешение порядка 50 микрон. Другими словами, каждая точка данных, или индекс, разнесены на 50 мкм. Таким образом, искажение 125 нм имеет следствием всего лишь малую долю сдвига в индексах OFDR в фактическом положении решетки. Несмотря на то, что изменение положения на 125 нм является не обнаружимым само по себе, то фазовый сдвиг на 90 градусов относительно легко измеряется системой OFDR.
Поэтому, OFDR может использоваться для измерения искажений в пределах решеток Брэгга, и, вместо измерения только скорости изменения фазы (то есть, длины волны), может измеряться абсолютная фаза, а по фазе, изменения расстояния в каждом сегменте вдоль оптического волокна. Это важно для точных измерений формы в ситуации, где наблюдается, что фаза в решетке должна измениться, наряду с тем, что положение решетки показывает не без труда различимое изменение. Традиционные технологии измерения оптического волокна обрабатывают фазовый сдвиг и положение как отдельные результаты.
Один из способов, чтобы сделать наглядной зависимость между фазовым сдвигом и положением, состоит в том, чтобы вообразить, что фаза оптического сигнала представлена секундной стрелкой на часах, и что местоположение вдоль волокна в индексах представлено часовой стрелкой на часах. Фиг. 6 иллюстрирует часы без минутной стрелки. Такие часы делают трудным определять время с разрешением в одну минуту. Но эти часы по-прежнему полезны для измерения времени как событий малой длительности с секундной стрелкой, так и событий большой длительности с часовой стрелкой. Не имея минутной стрелки, они бесполезны для измерения событий промежуточной средней длительности (например, 1 час 12 минут и 32 секунды) с односекундной точностью. Это трудность связывания двух шкал заставила традиционные оптические измерительные системы обрабатывать явления по отдельности.
Эта аналогия с часами помогает прояснить, почему нужно непрерывное измерение по всей длине волокна. Посредством непрерывного контроля положения секундной стрелки, может измеряться количество полных оборотов, которое предоставляет возможность одновременного контроля больших длительностей с высокой точностью. Связывая аналогию часов с предыдущим обсуждением решеток Брэгга, каждые 360 градусов, или 2π, изменения фазы устанавливают равенство сдвигу 500 нм в местоположении. Посредством непрерывного отслеживания фазы вдоль оптического волокна как локальные деформации, так и общие изменения длины оптического кабеля могут измеряться с очень высокой точностью.
Проблема при непрерывном отслеживании фазы состоит в том, что разрешение измерения должно быть достаточным, из условия, чтобы фаза не изменялась от одного сегмента к следующему более чем на 2π. Фиг. 7 иллюстрирует, насколько этот недостаток разрешения может быть проблематичным, так как, например, нет никакого способа проводить различие между изменением π/3 и изменением π/3+2π. Поэтому, два разных фазовых сдвига будут казаться имеющими одно и то же значение на единичной окружности. Другими словами, ошибка в один индекс была бы следствием счета полных оборотов 2π. В этом примере, измерение общего изменения длины оптического волокна было бы несовершенным на 500 нм.
Вот почему важно, чтобы система считывания формы имела достаточное разрешение, чтобы гарантировать способность отслеживать фазу по всей длине считывающего (измеряющего) форму волокна для обеспечения точности системы считывания (измерения) формы.
ОСНОВАННЫЕ НА РЕЛЕЕВСКОМ РАССЕЯНИИ ИЗМЕРЕНИЯ
Как пояснено выше, типичное использование FBG для считывания включает в себя измерение сдвигов в отраженном спектре отдельных решеток Брэгга, разнесенных с некоторым интервалом по волокну. Деформация получается для каждой секции волокна из измерения для каждой решетки Брэгга. Что касается считывания формы с использованием FBG, каждое измерение деформации указывает, насколько изогнут данный сегмент и в каком направлении. Эта информация суммируется для всех измеренных сегментов, чтобы давать совокупные положение и/или форму волокна. Однако, с использованием этого способа, погрешность в каждом сегменте накапливается вдоль волокна. Чем длиннее волокно, тем больше погрешность в измерении. Эта погрешность, использующая многочисленные решетки Брэгга, ограничивает скорость работы и диапазон применений.
Если бы были непрерывные решетки вдоль волокна, то фаза могла бы отслеживаться в каждой точке вдоль волокна, как описано выше. Отслеживание фазы по всей длине жилы исключает накопление погрешности. Вместо накопления погрешности в качестве квадратного корня от количества сегментов волокна, совокупная погрешность длины остается постоянной в доле оптической длины волны в материале. Как упомянуто ранее, длина волны света может иметь значение около 1550 нм в вакууме и около 1000 нм в волокне, которые фактически являются 500 нм при отражении. Отношение сигнал/шум 50 обеспечивает точность 10 нм вследствие полнообходной (отражательной) природы измерения. Получающаяся в результате точность деформации на одном метре волокна будет иметь значение 10 нанодеформаций.
Релеевское рассеяние может наблюдаться в качестве решетки Брэгга с произвольными фазами и амплитудами или решетки Брэгга, полностью состоящей из дефектов. Эта картина релеевского рассеяния, несмотря на то, что является произвольной, не изменена в пределах жилы волокна, при изготовлении жилы. Деформация, приложенная к оптическому волокну, вызывает сдвиги или искажения в рисунке релеевского рассеяния. Эти вынужденные искажения картины релеевского рассеяния могут использоваться в качестве измерения деформации с высоким разрешением для считывания формы посредством сравнения эталонного сканирования оптоволокна, когда оптоволокно находится в известной форме, с новым сканированием оптоволокна, когда оно было изогнуто или деформировано.
Фиг. 8 показывает примерные результаты такого сравнения. Эта фигура показывает разность фаз сигнала релеевского рассеяния между эталонным сканированием и измерительным сканированием в начале секции волокна, которое входит в область, которая находится под напряжением (натяжением). Данные графически нанесены в качестве функции индекса (показателя) оптоволокна, который представляет собой расстояние вдоль волокна. Как только область натяжения возникает, разность фаз начинает накапливаться. Поскольку π и -π имеют одинаковое значение на единичной окружности, сигналы испытывают «свертывание» каждое кратное число 2π по мере того, как разность фаз растет по длине оптоволокна. Это может быть видно вокруг индекса 3350, где значения слева от этого приближаются к π, а затем, значения внезапно оказываются на -π. Как показано, каждый оборот представляет собой около 500 нм изменения длины в волокне. Поскольку индекс представляет собой около 50 микрон от длины, это занимает около ста оборотов фазы для накопления полного индекса изменения задержки между измерением и эталоном.
Данные на фиг. 9 происходят из такого же набора данных, как и для фиг. 8, но из зоны, дальше вдоль по оптоволокну через приблизительно 35 оборотов фазы, или, приблизительно одну треть индекса. Шум в данных разности фаз увеличился и вызван увеличением сдвига между эталонной и измерительной картинами рассеяния. Это уменьшает когерентность между эталонными и измерительными данными, используемыми для определения разности фаз. Если видимое местоположение отдельного вызывающего рассеивание сегмента оптоволокна сдвигается на более чем индекс, то когерентность между эталоном и измерением теряется, и никакого измерения деформации не может быть получено из сравнения сигналов рассеяния.
Поэтому, эталонные данные должны приводиться в соответствие измерительным данным посредством учета сдвига, обусловленного деформацией вдоль оптоволокна. В случае одного индекса, имеющего значение около 50 микрон, на сегменте в один метр, это равняется всего лишь 50 частям на миллион, что не является большой деформацией. Фактически, вес самого оптоволокна может вызывать деформации этого порядка. К тому же, изменение температуры всего лишь на несколько градусов Цельсия также может вызывать подобный сдвиг. Поэтому этот сдвиг в индексах должен учитываться в расчете деформации жилы.
Сдвиг в результате деформации является физическим растяжением отдельных сегментов, которое дает в результате увеличенное время распространения рассеянного света. Сдвиг между эталоном и измерением относится к задержке. Задержка может учитываться посредством внимательного изучения модели того, насколько сдвиг в задержке до любой точки в считывающем (измерительном) оптоволокне оказывает влияние на сигнал, отраженный от этой точки. Если поле (свет) является колеблющимся на частоте ν и оно подвергается задержке τ, то оптическая фаза в качестве функции задержки задана посредством
Если оптическая фаза, ϕ, графически нанесена в качестве функции частоты, ν, получается прямая линия, которая пересекает начало координат. На практике, прохождение через материал, такой как стекло, искажает эту кривую от идеальной линии, что должно иметься ввиду при сравнении измеренных значений со значениями, предсказанными этой моделью. Но для текущих целей, достаточно этой модели.
Фиг. 10 показывает эту фазу для двух разных задержек. В примерной неограничивающей измерительной системе, использующей принцип, описанный выше, типичное качание частоты лазера могло бы покрывать диапазон от 192,5 до 194,5 ТГц. Эти частоты представляют собой качание от 1542 нм (194,5 ТГц) до 1558 нм (192,5 ТГц), которое было испытательным диапазоном качания для неограничивающего испытательного применения считывания (измерения) формы. На этом интересующем диапазоне, фаза для данной задержки колеблется в диапазоне Δϕ. Что касается показанных двух задержек, τ1 и τ2, разность в этом диапазоне качания частоты,
В примерном испытательном применении, диапазон качания, Δν, определяет пространственное разрешение, δτ, измерения. Другими словами, он определяет длину индекса во временной области. Таковые связаны обратной зависимостью:
Что касается примерного диапазона частот, описанного выше, длина индекса имеет значение 0,5 пс или 50 микрон в стекле. На центральной частоте, фазовый сдвиг 2π вызывается изменением задержки всего лишь 0,00516 пс или 516 нм в стекле. Фазовый сдвиг 2π, в таком случае, представляет собой всего лишь сдвиг на нецелочисленный индекс в данных временной области. Для того чтобы сдвинуть задержку на один индекс во временной области, задержка должна измениться в достаточной мере, чтобы вызывать изменение фазы на центральной частоте 96,7×2π.
Эти примеры иллюстрируют, что линейное изменение фазы представляет собой сдвиг местоположения событий во временной области (или области задержек). Как видно выше, сдвиг в один индекс будет полностью искажать измерения изменения фазы по длине оптоволокна. Для надлежащего сравнения фаз, кроме того, эти сдвиги должны учитываться по мере того, как они происходят, и эталонные данные должны быть выровнены с измерительными данными по всей длине жилы. Для внесения поправки на это ухудшение когерентности, требуется временной сдвиг эталонных данных. Это может достигаться умножением эталонных данных для данного сегмента, rn, на линейную фазу. Здесь, n представляет индекс во временной области или увеличивающееся расстояние вдоль оптоволокна. Крутизна этой поправки на фазу, γ, находится осуществлением подбора прямой на предыдущих значениях задержки. Сдвиг фазы в этой составляющей поправки, φ, выбирается из условия, чтобы среднее значение этой фазы было нулевым.
Фиг. 11 показывает скорректированную разность фаз на секции волокна, где возникла треть сдвига в индексах. Разность фаз в этом местоположении поддерживает такое же отношение сигнал/шум, как более близкая часть оптоволокна. Посредством применения временного сдвига на основании задержки на конкретном расстоянии, когерентность может восстанавливаться со снижением фазового шума.
ПРИМЕРНОЕ СЧИТЫВАЮЩЕЕ ФОРМУ ОПТОВОЛОКНО
Искажения отслеживания в релеевском рассеянии оптического волокна дают непрерывные измерения деформации с высоким разрешением. Геометрия многожильного считывающего (измеряющего) форму волокна используется для пояснения того, как эта многожильная структура дает возможность измерений как изгиба, так и направления изгиба по длине оптоволокна.
Оптическое оптоволокно содержит множество жил в конфигурации, которая предоставляет возможность считывания как внешнего скручивания, так и деформации независимо от направления изгиба. Один из неограничивающих примерных вариантов осуществления такого оптоволокна показан на фиг. 1 и описан ниже. Оптоволокно содержит в себе четыре жилы. Одна жила расположена вдоль центральной оси оптоволокна. Три внешних жилы расположены концентрическими по отношению к этой жиле с интервалами 120 градусов с разнесением 70 мкм. Внешние жилы повернуты относительно центральной жилы, создавая спираль с периодом 66 оборотов на метр. Иллюстрация этого спирально свернутого многожильного считывающего форму волокна изображена на фиг. 12. Компоновка неограничивающего испытательного многожильного оптоволокна, используемого в этом обсуждении, изображена на фиг. 13.
Еще один неограничивающий пример считывающего форму оптоволокна содержит в себе более чем три внешних жилы для облегчения производства оптоволокна или для получения дополнительных данных, чтобы улучшить рабочие характеристики системы.
На поперечном разрезе свитого в спираль оптоволокна, положение каждой внешней жилы оказывается вращающимся вокруг центральной жилы с продвижением вдоль по длине оптоволокна, как проиллюстрировано на фиг. 14.
ПОПРАВКА НА ВОБУЛЯЦИЮ В СКРУЧЕННОМ ОПТОВОЛОКНЕ
Для преобразования сигналов деформации из внешних жил в изгиб и направление изгиба, угловое положение внешней жилы должно определяться с высокой степенью точности. При условии постоянной интенсивности закручивания спирали (смотрите фиг. 12), положение внешних жил может определяться на основании расстояния вдоль оптоволокна. На практике, производство завитого в спираль оптоволокна вносит некоторое колебание в намеченную интенсивность закручивания. Колебание интенсивности закручивания по длине оптоволокна вызывает угловое отклонение от линейного изменения, ожидаемого от номинальной интенсивности закручивания, и это угловое отклонение указывается ссылкой как «вобуляция» и обозначается в качестве сигнала W(z) вобуляции.
Одно из примерных испытательных оптоволокон, произведенных со спиральной многожильной геометрией, имеет очень высокую степень точности в показателях средней интенсивности закручивания, 66 оборотов на метр. Однако на коротких расстояниях (например, 30 см) интенсивность закручивания значительно изменяется и может заставлять угловое положение меняться на целых 12 градусов от чисто линейного изменения фазы с расстоянием. Эта ошибка в интенсивности закручивания измеряется посредством размещения оптоволокна в конфигурации, которая будет вызывать непрерывный изгиб в одиночной плоскости, как есть в случае для уложенного витком оптоволокна на плоской поверхности. Когда оптоволокно размещено в таком витке, спиральная жила будет перемежаться между растяжением и сжатием по мере того, как она проходит через наружный участок изгиба и внутренний участок изгиба. Если искажение фазы графически наносится в зависимости от расстояния, синусоидальный сигнал формируется с периодом, который соответствует интенсивности закручивания оптоволокна. Отклонения при производстве многожильного оптоволокна могут обнаруживаться в качестве небольших сдвигов фазы от ожидаемой постоянной интенсивности закручивания оптоволокна.
Пример этих колебаний в интенсивности закручивания показан на фиг. 15. Сплошная кривая является данными фазы (сигналом изгиба), взятыми с плоского витка, а пунктирная линия является сформированной идеальной синусоидой с такой же частотой и фазой, как у спирали. Отметим, что в начале сегмента данных кривые совпадают по фазе с выровненными переходами чрез нуль. К середине сегмента, сплошная кривая слегка продвинулась вперед от пунктирной кривой, но к концу сегмента данных, наблюдается значительное смещение. Если составляющая постоянного тока сигнала напряжения удаляется, и рассчитывается фазовый сдвиг, разность между этими двумя сигналами является значительной и до некоторой степени периодической.
Фиг. 16 показывает примерный сигнал вобуляции, W(z), с периодическим отклонением от произведенной интенсивности закручивания по длине считывающего форму оптоволокна. Колебание фазы показано в качестве функции длины в индексах оптоволокна. Примерный набор данных представляет приблизительно три метра оптоволокна. На порядка трети метра выявляется периодичность в характере интенсивности закручивания оптоволокна. На длине оптоволокна, создается состоятельная средняя интенсивность закручивания оптоволокна, но эти небольшие флуктуации должны калиброваться, для того чтобы корректно интерпретировать данные фазы, вырабатываемые многожильным скрученным оптоволокном. Это измерение при изменении интенсивности закручивания или «вобуляции» является воспроизводимым и важным для расчета формы при условии практического производства оптоволокна.
СЧИТЫВАНИЕ СКРУЧИВАНИЯ В МНОГОЖИЛЬНЫХ ОПТОВОЛОКНАХ
Силы кручения, прикладываемые к оптоволокну, также имеют потенциальную возможность вызывать поворотный сдвиг внешних жил. Чтобы надлежащим образом отображать сигналы деформации жил в правильные направления изгиба, как вобуляция, так и приложенное скручивание должны измеряться по всей длине считывающего форму оптоволокна. Геометрия завитого в спираль многожильного отпроволокна дает возможность прямого измерения скручивания по длине оптоволокна в дополнение к вызванной изгибом деформации, как будет описано ниже.
Если многожильное оптоволокно поворачивается, в то время как оно вытягивается, центральная жила является по существу ненарушенной, наряду с тем, что внешние жилы придерживаются спиральной траектории вдоль по оптоволокну, как показано в центре фиг. 17. Если такая структура затем подвергается напряжению кручения, длина центральной жилы остается постоянной. Однако, если направление напряжение кручения соответствует вытягиванию спирали, период спирали увеличивается, и внешние жилы будут равномерно удлиняться, как показано в верхней части фиг. 17. Наоборот, если скручивающее направление является противоположным вытягиванию спирали, внешние жилы «разматываются» и испытывают сжатие по своей длине, как показано в нижней части фиг. 17.
Для получения чувствительности многожильной конфигурации к скручиванию, оценивается изменение длины, которое внешняя жила будет испытывать вследствие кручения. Сегмент оптоволокна смоделирован в качестве цилиндра. Длина L цилиндра соответствует размеру сегмента наряду с тем, что расстояние от центральной жилы до внешней жилы представляет радиус r цилиндра. Поверхность цилиндра может быть представлена в качестве прямоугольника, если разрезать цилиндр в продольном направлении, а затем расправить поверхность. Длина поверхности равна длине L сегмента наряду с тем, что ширина поверхности соответствует окружности цилиндра 2πr. Когда оптоволокно скручивается, конечная точка оптоволокна перемещается вокруг цилиндра наряду с тем, что начальная точка остается неподвижной. Спроецированная на расправленную поверхность скрученная жила образует диагональную линию, которая длиннее, чем длина L прямоугольника. Это изменение длины внешней жилы имеет отношение к скручиванию в оптоволокне.
Фиг. 18 показывает внешнюю жилу, которая испытывает скручивание, может моделироваться в качестве выпрямленного цилиндра, в то время как он перемещается вдоль поверхности. По вышеприведенной выпрямленной поверхности может быть показано следующее:

В вышеприведенном уравнении,



Предполагается, что минимальным выявляемым расстоянием в этом примере должно иметь значение десять радиан оптической волны. Что касается примерной испытательной системы, рабочая длина волны имеет значение 1550 нм, а показатель стекла имеет значение около 1,47, давая в результате минимальное выявляемое расстояние приблизительно 10 нм. Если радиус имеет значение 70 микрон, а период спирали имеет значение 15 мм, то уравнение (8) указывает, что считывающее форму оптоволокно имеет чувствительность к скручиванию 0,3 градуса. Если считывающее оптоволокно начинает свою форму немедленным поворотом на 90 градусов, так чтобы ошибка, обусловленная скручиванием, максимизировалась, то получающаяся в результате ошибка положения будет иметь значение 0,5% длины оптоволокна. В большинстве применений, изгибы 90 градусов не возникают в начале оптоволокна, а потому ошибка будет меньшей, чем 0,5%.
РАСЧЕТ СКРУЧИВАНИЯ В ЧЕТЫРЕХЖИЛЬНОМ ОПТОВОЛОКНЕ
Чувствительность измерения скручивания основана на чувствительности одиночной жилы, но считывание скручивания по длине оптоволокна является зависящим от всех четырех жил. Если разность изменения длины между средним значением внешних жил и центральной жилой известна, то может рассчитываться скручивание (в показателях абсолютного количества градусов), присутствующее в оптоволокне.
Внешнее скручивание вдоль оптоволокна может рассчитываться с использованием неограничивающих примерных процедур, намеченных в общих чертах на блок-схеме последовательности операций способа, показанной на фиг. 19. Определяются сигналы фазы для всех четырех жил A-D, и сигналы для внешних жил B-D усредняются. Расчет поступающего извне скручивания выполняется посредством сравнения среднего значения сигналов фазы внешних жил с таковым у центральной жилы. Если оптоволокно испытывает крутящую силу, все внешние жилы испытывают сходное растяжение или сжатие, определенное ориентацией силы по отношению к направлению закручивания спирали. Центральная жила не испытывает изменения длины в результате прикладываемой крутящей силы. Однако, центральная жила восприимчива к изменениям натяжения и температуры и служит в качестве способа прямого измерения деформации общего типа. Отсюда, если сигнал фазы центральной жилы вычитается или удаляется из среднего значения трех внешних жил, получается мера изменения фазы в результате кручения. Это изменение фазы может масштабироваться мерой поступающего извне скручивания или, другими словами, поворачиванием оптоволокна. В пределах области прикладываемого скручивания на длине оптоволокна, меньшего, чем полный оборот, этот масштабный коэффициент может приблизительно выражаться как линейный. В присутствии высоких крутящих сил, предпочтительно должна учитываться составляющая второго порядка. Кроме того, скручивание линейно распространяется между точками соединения, так что различные области скручивания могут наблюдаться по длине оптоволокна.
Фиг. 20 показывает примерный набор данных для обобщенной формы, которая иллюстрирует алгоритм фиг. 19 более подробно. График показывает искажение фазы в результате локального изменения длины центральной жилы (черный) и внешней жилы (серый) считывающего форму оптоволокна для обычного изгиба. Две фазовых кривых, показанных на фиг. 20, представляют локальные изменения длины, испытываемые двумя из жил в многожильном считывающем форму оптоволокне. Кривые для двух из внешних жил не показаны в попытке сохранить графики понятными, но значения из этих других двух жил используются при определении окончательной формы оптоволокна.
Сигнал фазы центральной жилы не испытывает периодических колебаний. Колебания являются результатом перехода внешней жилы между сжимающим и растягивающим режимами по мере того, как спираль проходит через данный изгиб. Центральная жила накапливает фазу по длине считывающего форму оптоволокна, даже если она не восприимчива к вызванной изгибом или скручиванием деформации. Сигнал фазы центральной жилы описывает деформацию общего типа, испытываемую всеми жилами оптоволокна. Внешние жилы усредняются (серый) и графически наносятся по отношению к центральной жиле (черный) на фиг. 21.
В то время как внешние жилы являются несовпадающими по фазе на 120 градусов, вызванное изгибом отклонение сигналов фазы усредняется до нуля. На Фиг. 21 наблюдается незначительное отклонение между двумя фазовыми кривыми. Вычитая фазы центральной жилы, прямое измерении деформации общего типа оставляет фазу, накопленную в результате закручивающих сил. При надлежащем масштабировании, этот сигнал может масштабироваться мерой сворачивания, обозначенной как сигнал T(z) «скручивания», порожденный из фиг. 21, который показан на фиг. 22. По сигналу скручивания, T(z), может определяться смещение углового положения внешних жил в результате закручивания по длине границы считывающего форму оптоволокна. Это предоставляет сигналу изгиба возможность преобразовываться в корректное направление изгиба.
Желательность компенсации скручивания при расчете формы проиллюстрирована набором данных, показанным на фиг. 23. Кончик считывающего форму оптоволокна перемещался в одной плоскости по сетке из пяти точек, образующей квадрат 250 мм с точкой в своем центре при обработке формы с учетом скручивания (заполненный). Поправка на внешнее скручивание не использовалась в обработке набора данных, графически нанесенного в качестве незаполненных точек. На графике невозможно различить исходную форму, очерченную кончиком оптоволокна, если не используется расчет скручивания. Даже для малых перемещений кончика оптоволокна, значительное скручивание накапливается по длине оптоволокна. Таким образом, если скручивание не адаптируется при считывании формы, то значительные уровни точности не могут быть достигнуты.
РАСЧЕТ ВЫЗВАННОЙ ИЗГИБОМ ДЕФОРМАЦИИ
Наряду с информацией, описывающей величину скручивания, прикладываемого к считывающему форму оптоволокну, многожильное оптоволокно также дает возможность извлечения информации об изгибе в ортонормальной системе координат. Сигналы фазы для четырех оптических жил считывающего форму оптоволокна могут интерпретироваться для предоставления двух измерений дифференциальной ортогональной деформации, как описано ниже. Эти значения деформации затем могут использоваться для прослеживания вектора наведения по длине оптоволокна, в конечном счете, давая меру положения и/или формы оптоволокна.
С удаленной общей деформации общего типа, три скорректированных сигнала фазы внешней жилы используются для извлечения меры изгиба вдоль считывающего формы оптоволокна. Вследствие симметрии, две из внешних жил могут использоваться для реконструкции сигналов деформации по длине оптоволокна. Прежде всего, берется производная сигнала фазы для двух из внешних жил. Эта производная предпочтительно рассчитывается, так что не предоставляется возможность расти ошибке в интеграле производной, которая приводит к потере точности системы. Что касается операций с удвоенной точностью, это не является требующим решения вопросом, но если операции выполняются с ограниченной числовой точностью, то округление должно применяться из условия, чтобы значение интеграла не накапливало ошибку (сходящееся округление).
Допустим для этого пояснения, что деформация может быть спроецирована линейным образом.
Таким образом, фазовая характеристика данной жилы является комбинацией двух ортогональных деформаций, спроецированных относительно их радиального разнесения.

В вышеприведенном уравнении,



Фазовая характеристика из двух внешних жил имеет значение:


Решение относительно




В вышеприведенных уравнениях 12 и 13, k, интенсивность закручивания, предполагается постоянной по длине оптоволокна. Вышеприведенные выводы остаются действительными, если поправочные составляющие добавлены в интенсивность закручивания. Более точно, измеренные вобуляция W(z) и сигналы T(z) скручивания учитываются для компенсации поворотного отклонения внешних жил по длине оптоволокна. Вышеприведенные выражения (12) и (13), в таком случае, становятся следующими:

Уравн. 14

Уравн. 15
РАСЧЕТ ФОРМЫ ПО РАЗНОСТНЫМ СИГНАЛАМ ОРТОГОНАЛЬНОЙ ДЕФОРМАЦИИ
Уравнения (14) и (15) создают два разностных сигнала ортогональной деформации. Фиг. 24 изображает кривые ортогональной деформации для волокна, размещенного в нескольких изгибах, которые все возникают в одной и той же плоскости. Эти два разностных сигнала ортогональной деформации обрабатываются для выполнения заключительного интегрирования, по длине считывающего форму волокна для выработки трех декартовых сигналов, представляющих положение и/или форму оптоволокна.
Фиг. 25 показывает блок-схему последовательности операций способа, описывающую неограничивающие примерные этапы для расчета формы по деформации. Сигналы A и B ортонормальной деформации определяются согласно уравнениям 14 и 15.
Полученные данные в сети сбора данных предпочтительно сохраняются в дискретных массивах в памяти компьютера. Чтобы делать это, изменение представления из непрерывного представления в уравнении 15 в дискретное представление на основании индекса, необходимо в этот момент. Кроме того, изгиб в каждой точке в массиве может преобразовываться в угол поворота, поскольку длина сегмента (Δz) является фиксированной и конечной, с использованием уравнения (1). Параметр, a, определяется расстоянием жил от центра оптоволокна и оптическим коэффициентом деформации, который является постоянной пропорциональности, соотносящей деформацию с изменением длины оптического пути.
Эти измерения поворота θ, обусловленные локальным изгибом в оптоволокне, могут использоваться для формирования матрицы поворота в трех измерениях. Если представить себе, начиная с оптоволокна, выровненного с осью z, две составляющих изгиба поворачивают вектор, представляющий первый сегмент оптоволокна, на эти два небольших поворота. Математически, это делается с использованием матричного умножения. Для небольших поворотов может использоваться упрощенная матрица поворота, показанная в уравнении (18), приведенном ниже.
Вышеприведенная матрица поворота действительна, если


Другими словами, каждый сегмент вдоль оптоволокна вводит небольшой поворот, пропорциональный размеру и направлению изгиба вдоль такого сегмента. Этот итерационный расчет может быть записан в математической нотации, приведенной ниже:

Здесь вновь, для небольших поворотов и почти плоских поворотов, углы фактичски суммируются, и посредством сохранения точного измерения интеграла деформации (изменения длины) на всем протяжении длины считывающего форму оптоволокна, достигается лучшая точность, чем возможна с использованием исключительно деформации. Матрица, рассчитанная выше, содержит в себе информацию о локальной ориентации жил, которая предоставляет возможность, чтобы применялись надлежащие повороты. Если основная заинтересованность находится в определении положения вдоль оптоволокна, то необходим только локальный вектор, который описывает направление наведения оптоволокна в таком местоположении. Этот вектор наведения может быть найден простой операцией скалярного произведения.
Если каждый из этих векторов наведения расположен головной частью к хвостовой части, как проиллюстрировано на фиг. 26, в результате происходит точное измерение. Таким образом, положение и/или направление в любой точке по длине оптоволокна могут обнаруживаться суммированием всех предыдущих векторов наведения, масштабированных под разрешение системы.
Один из неограничивающих примеров системы считывания положения описан вместе с фиг. 27. Могут использоваться другие реализации и/или компоненты. Более того, не каждый показанный компонент является обязательно неотъемлемым. Системный контроллер и процессор данных (A) инициируют два следующих друг за другом качания частоты перестраиваемого лазера (В) на определенных диапазонах длин волн и скорости перестройки. Свет, испускаемый из перестраиваемого лазера направляется в две оптические сети через оптический разветвитель (C). Первая из этих двух оптических сетей является сетью лазерного контроля (E) наряду с тем, что вторая назначена в качестве опрашивающей сети (D). В пределах сети лазерного контроля (E), свет разделяется с помощью оптического разветвителя (F) и отправляется в эталон с газовой ячейкой (например, синильной кислоты), используемый для калибровки длины волны полосы C. Спектр газовой ячейки получается фотодиодным детектором (L), присоединенным к сети сбора данных (U).
Оставшаяся часть света, разделенного на оптическом разветвителе (F), направляется в интерферометр, сконструированный из оптического разветвителя (H), присоединенного к двум зеркалам с фарадеевскими вращателями (I,J). Первое зеркало с фарадеевским вращателем (FRM) (I) служит в качестве эталонного плеча интерферометра наряду с тем, что второе зеркало с фарадеевским вращателем (J) дистанцировано катушкой задержки (K) оптического волокна. Этот интерферометр вырабатывает контрольный сигнал, который используется для внесения поправки на нелинейность перестройки лазера и получается сетью сбора данных (U) через фотодиодный детектор (M).
Свет, направленный в опрашивающую сеть (D) оптическим разветвителем (C), входит в контроллер (N) поляризации, который поворачивает лазерный свет в ортогональное состояние между двумя следующими друг за другом сканированиями лазера. Этот свет затем разделяется через ряд оптических разветвителей (O) равномерно между четырьмя интерферометрами (P, Q, R, S) сбора данных. В пределах интерферометра сбора данных для центральной жилы, свет разделяется между эталонным трактом и измерительным трактом оптическим разветвителем (AA). «Зондовый» лазерный свет из разветвителя AA проходит через оптический циркулятор (T) и проникает в центральную жилу считывающего форму оптоволокна (W) через вывод центральной жилы многожильного устройства разветвления выхода (V) для считывающего форму оптоволокна (W). Считывающее форму оптоволокно (W) содержит в себе центральную оптическую жилу, концентрическую по отношению к трем спирально намотанным внешним оптическим жилам. Поперечное сечение оптоволокна (X) изображает, что внешние жилы (Z) являются равномерно разнесенными, концентрическими и отделенными заданным радиальным расстоянием от центральной жилы (Y). Получающееся в результате релеевское обратное рассеяние центральной оптической жилы (Y), как следствие лазерного сканирования, проходит через оптический циркулятор (T) и интерферирует со светом эталонного тракта интерферометра сбора данных, когда подвергается рекомбинации на оптическом разветвителе (BB).
Интерференционная картина проходит через делитель пучка оптической поляризации (DD), разделяющий сигнал интерференции на два принципиальных состояния поляризации (S1, P1). Каждое из двух состояний поляризации получается сетью сбора данных (U) с использованием двух фотодиодных детекторов (EE, FF). Вращатель поляризации (CC) может быть настроен для балансировки сигналов на фотодиодных детекторах. Внешние оптические жилы считывающего форму оптоволокна измеряются подобным образом с использованием соответствующих интерферометров сбора данных (Q, R, S). Системный контроллер и процессор данных (A) интерпретирует сигналы четырех отдельных оптических жил и формирует измерение, как положения, так и ориентации по длине считывающего форму оптоволокна (W). Данные затем экспортируются из системного контролера (A) для отображения и/или использования (GG).
ПОПРАВКИ НА ДВУЛУЧЕПРЕЛОМЛЕНИЕ
Когда оптическое волокно изгибается, круговая симметрия жилы нарушается, и предпочтительная «вертикаль» и «горизонталь» создается разграничением между направлениями в плоскости изгиба и перпендикулярном плоскости изгиба. Свет, проходящий по волокну, в таком случае, испытывает разные показатели преломления в зависимости от своего состояния поляризации. Это изменение показателя преломления в качестве функции поляризации рассматривается как двулучепреломление. Это представляет собой значительную проблему для измерения формы, так как измеренное изменение фазы зависит от состояния поляризации падающей волны, и это состояние падающей волны не может регулироваться в стандартном волокне.
Эта проблема может быть решена измерением характеристики оптической жилы в двух ортогональных состояниях поляризации. Если характеристика этих двух состояний усредняется надлежащим образом, отклонение измеренной функции в качестве функции поляризации может быть устранено или, по меньшей мере, существенно уменьшено. Блок-схема последовательности операций способа на фиг. 28 показывает в общих чертах неограничивающую примерную последовательность операций для внесения поправки на двулучепреломление, такое как собственное двулучепреломление, вызванное изгибом двулучепреломление и т.д., как в измеренном, так и в эталонном значениях. Неограничивающий пример, приведенный ниже, относится к вызванному изгибом двулучепреломлению, но в более общем смысле, применим к любому двулучепреломлению.
Первый этап в последовательности операций состоит в том, чтобы измерять характеристику жилы в двух ортогональных состояниях поляризации, названных «s» и «p». Характеристика s и характеристика p измеряются в каждом состоянии поляризации, обеспечивая в результате четыре массива. Для простоты, характеристики отклика для первого состояния поляризации названы a и b, а характеристики отклика для второго состояния поляризации названы c и d, где a и с - характеристики отклика на детекторе s, а b и d - характеристики отклика на детекторе p.
Второй этап состоит в том, чтобы рассчитывать следующие произведения двух массивов.
Рассчитывается подвергнутый фильтрации нижних частот вариант каждого из этих сигналов, который записывается в качестве (x) и (y). Нотация математического ожидания здесь используется для указания операции фильтрации нижних частот. Фазы относительно медленно меняющихся функций используются для выравнивания высокочастотных сигналов рассеяния по фазе, так что они могут складываться:

Эта последовательность операций затем повторяется для выработки окончательного скалярного значения:
Далее, может быть создан медленно меняющийся вектор, который представляет векторную природу изменения вплоть до оптоволокна без широкополосных составляющих релеевского рассеяния, поскольку все они относятся к категории u:

Затем, поправка, обусловленная эффектом двулучепреломления, рассчитывается с использованием:
где

Поправка на двулучепреломление компенсирует двулучепреломление в результате асимметрии жил во время производства и радиусы изгиба свыше 100 мм. В то время как считывающее форму оптоволокно размещено в крутых изгибах с радиусами, меньшими, чем 100 мм, становится значимым эффект двулучепреломления второго порядка.
При условии, что значительные уровни деформации проявляются только в направлении, параллельном центральной жиле многожильного считывающего форму оптоволокна, рассмотрим диаграмму на фиг. 29. В то время как оптоволокно изогнуто, деформация растяжения измеряется в области между 0
Фиг. 30 показывает две фазовые диаграммы, полученные для петли оптоволокна диаметром 40 мм. Колебания в этих сигналах являются результатом многожильной сборки, смещенной от центра оптоволокна. На более крутых изгибах, сигналы деформации достаточно высоки, чтобы извлекать характеристику отклика из этого едва различимого отклонения от концентричности. График показывает, что среднее значение спиральных внешних жил накапливает значительно меньшую фазу в области изгиба по сравнению с центральной жилой. Эта недостаточность фазы служит в качестве доказательства для вызванного изгибом двулучепреломления. Вспомним, что расчет поступающего извне скручивания выполняется нахождением абсолютной разности фаз между центральной жилой и средним значением трех внешних жил. График на фиг. 30 показывает, что сигнал ложного скручивания будет измеряться в области изгиба.
Измеренная фазовая характеристика внешней жилы указывает его положение относительно профиля вызванной давлением деформации, εx. Поэтому квадрат характеристики деформации внешней жилы обеспечивает меру как местоположения, так и величины относительно поля давлений. Эта характеристика отклика может масштабироваться и использоваться в качестве поправки для внешних жил, чтобы соответствовать уровню εx, воспринимаемого центральной жилой, тем самым внося поправку на ложное скручивание.
ϕn - фазовая характеристика на внешней жиле, N - количество внешних жил, а k служит в качестве масштабного коэффициента. Фиг. 31 показывает характеристику деформации внешней жилы для петли оптоволокна диаметром 40 мм с вычтенной деформацией общего типа. По этому сигналу характеристики деформации, поправка на изгиб, вызванная двулучепреломлением, может быть аппроксимирована, как видно на графике, показанном на фиг. 32.
Применение этой поправки имеет значительное влияние на измеренное скручивание в области изгиба, как показано на фиг. 33. Сравнение сигнала скручивания с и без поправки 2-го порядка показывает, что ошибка в 25 градусов накапливается в области изгиба без поправки на двулучепреломление 2-го порядка в этом примере.
ПРИМЕНЕНИЕ ПОПРАВОК НА ДВУЛУЧЕПРЕЛОМЛЕНИЕ И ВЛИЯНИЕ НА ТОЧНОСТЬ
Последующее описывает воздействия поляризации на точность системы считывания формы. Для достижения переменной входной поляризации между измерениями, контроллер поляризации петли добавлен между считывающим форму оптоволокном и системой считывания формы, как проиллюстрировано на фиг. 34.
Для иллюстрации влияния вышеописанных поправок на точность системы рассмотрим сигнал в плоскости для относительно простой формы, как показанная на фиг. 35, где 1,4 метров считывающего форму оптоволокна проложены через одиночный поворот на 180 градусов с радиусом изгиба 50 мм. Фиг. 36 показывает измерения вне плоскости для трех следующих один за другим измерений. Между каждыми измерениями, поляризация меняется с использованием контроллера поляризации на фиг. 34.
Если двулучепреломление не учитывается, наблюдается значительная потеря точности и прецизионности. Большая ответная реакция наблюдается в сигнале вне плоскости, в то время как меняется состояние поляризации. Оптоволокно считывает угловую ошибку только в области изгиба в результате системы, измеряющей ошибочный сигнал скручивания. Таким образом, при существовании этого изгиба, есть значительная ошибка в направлении наведения оптоволокна. Прогнозирование характеристики поляризации оптоволокна является труднодостижимой проблемой, и не каждая жила соответствует одной и той же протяженности для заданного изгиба. Фиг. 37 иллюстрирует этот момент, показывая поправки на двулучепреломление для жил. Однако одинаковые два измерения для центральной жилы имеют значительное отклонение по своим фазовым характеристикам на фиг. 38. Два следующих один за другим измерения реагируют по-разному на входную поляризацию, давая подтверждение для двулучепреломления в считывающем форму оптоволокне.
Приведение в действие поправки на двулучепреломление улучшало прецизионность системы, как показано на фиг. 39. Отклонение между измерениями формы, в то время как меняется входная поляризация, минимизируется, что значительно увеличивает прецизионность системы. Однако значительная погрешность в точности системы по-прежнему наблюдается. Если также выполняется поправка второго порядка, основанная на вызванном изгибом двулучепреломлении, есть дополнительное улучшение системы, как показано на фиг. 40. Как прецизионность, так и точность сигнала вне плоскости сильно улучшаются.
Хотя были подробно показаны и описаны различные варианты осуществления, формула изобретения не ограничена никаким конкретным вариантом осуществления или примером. Ничто из вышеприведенного описания не должно читаться в качестве предполагающего, что какой-нибудь конкретный элемент, этап, диапазон или функция являются неотъемлемыми, так что они должны быть включены в объем формулы изобретения. Объем запатентованного объекта определяется только формулой изобретения. Объем правовой защиты определен словами, изложенными в принятой формуле изобретения и ее эквивалентах. Все структурные и функциональные эквиваленты для элементов описанного выше предпочтительного варианта осуществления, которые известны рядовым специалистам в данной области техники, в прямой форме включены в материалы настоящей заявки посредством ссылки и подразумеваются охваченными настоящей формулой изобретения. Более того, не обязательно, чтобы устройство или способ принимали меры в ответ на каждую и всякую проблему, подвергнутую стремлению решаться настоящим изобретением, чтобы она была охвачена настоящей формулой изобретения. Никакой пункт формулы изобретения не подразумевается ссылающимся на параграф 6 раздела 12 кодекса законов США, пока не использованы слова «средство для» или «этап для». Более того, никакие вариант осуществления, признак, компонент или этап в этом описании изобретения не подразумеваются сделанными всеобщим достоянием независимо от того, перечислены ли вариант осуществления, признак, компонент или этап в формуле изобретения.
Реферат
Раскрыты измерительные способ и устройство для считывания формы с помощью многожильного волокна. Изменение оптической длины выявляется в некоторых из жил многожильного волокна до некоторой точки на многожильном волокне. Местоположение и/или направление наведения определяются в точке на многожильном волокне на основании обнаруженных изменений оптической длины. Точность определенного местоположения является лучшей, чем 0,5% оптической длины многожильного волокна до точки на многожильном волокне. Технический результат - определение формы участка многожильного волокна на основании изменений оптической длины. 3 н. и 38 з.п. ф-лы, 40 ил.
Формула
обнаруживают изменения оптической длины в некоторых из жил в многожильном волокне вплоть до некоторой точки на многожильном оптоволокне, и
определяют местоположение или направление наведения в точке на многожильном волокне на основании выявленных изменений оптической длины.
обнаруживают отраженную картину релеевского рассеяния в отраженном световом сигнале для каждой длины сегмента,
сравнивают отраженную картину релеевского рассеяния с эталонной картиной релеевского рассеяния для каждой длины сегмента и
определяют фазовую характеристику для каждой длины сегмента на основании указанного сравнения.
определяют параметр скручивания, связанный с многожильным волокном в точке многожильного оптоволокна на основании выявленных изменений оптической длины многожильного волокна.
вносят поправку на определенный параметр скручивания на каждой из длин сегментов.
определяют фазовую характеристику светового сигнала, отраженного в каждой из четырех жил от каждой длины сегмента, и при этом деформация в многожильном волокне на одной или более длин сегментов вызывает сдвиг по фазе отраженного светового сигнала в каждой из четырех жил, усредняют фазовые характеристики для трех периферийных жил,
комбинируют усредненную фазовую характеристику с фазовой характеристикой четвертой жилы для удаления деформации общего вида и
определяют параметр скручивания из комбинированной фазовой характеристики.
определяют ориентацию многожильного волокна в точке на многожильном волокне на каждой из длин сегментов,
вносят поправку на определенную ориентацию при определении местоположения в точке на многожильном волокне на основании выявленных изменений оптической длины.
определяют угол поворота многожильного волокна в точке на многожильном оптоволокне на каждой из длин сегментов по сравнению с номинальной интенсивностью закручивания многожильного волокна, определяют коэффициент вобуляции для многожильного волокна посредством ограничения многожильного волокна криволинейной ориентацией в одной плоскости и
вносят поправку на коэффициент вобуляции при определении местоположения в точке на многожильном волокне на основании выявленных изменений оптической длины.
определяют отклонение номинальной интенсивности закручивания в точке вдоль многожильного волокна и
вносят поправку на отклонение интенсивности закручивания.
пропускают свет с, по меньшей мере, двумя состояниями поляризации вдоль многожильного волокна и
комбинируют отражения света с, по меньшей мере, двумя состояниями поляризации при определении местоположения или направления наведения в точке на многожильном волокне на основании выявленных изменений оптической длины.
используют контроллер поляризации для пропускания первого светового сигнала в первом состоянии поляризации по многожильному волокну,
используют контроллер поляризации для пропускания второго светового сигнала во втором состоянии поляризации по многожильному волокну,
рассчитывают независимые от поляризации изменения оптической длины в некоторых из жил многожильного волокна вплоть до точки на многожильном волокне с использованием отражений первого и второго световых сигналов.
определяют вызванные изгибом изменения оптической длины вдоль многожильного волокна и учитывают вызванные изгибом изменения оптической длины при определении параметра скручивания.
рассчитывают изгиб на одной из длин сегментов, возводят в квадрат рассчитанный изгиб,
умножают возведенный в квадрат изгиб на постоянную для получения произведения изгиба, комбинируют произведение изгиба с определенными изменениями оптической длины внешней жилы многожильного волокна на одной длине сегмента.
схему обнаружения, сконфигурированную для обнаружения изменения оптической длины жил в многожильном волокне вплоть до некоторой точки на многожильном волокне, и
схему расчета, сконфигурированную для определения местоположения или направления наведения в точке на многожильном волокне на основании обнаруженных изменений оптической длины.
лазер, сконфигурированный для передачи света с, по меньшей мере, двумя состояниями поляризации вдоль многожильного волокна,
при этом схема расчета сконфигурирована для комбинирования отражений света с по меньшей мере двумя состояниями поляризации при определении местоположения или направления наведения в точке на многожильном волокне на основании обнаруженных изменений оптической длины.
обнаруживают изменения оптической длины некоторых из жил в многожильном волокне вплоть до некоторой точки на многожильном волокне и
определяют местоположение или направление наведения в точке на многожильном волокне на основании обнаруженных изменений оптической длины.
Комментарии