Способ бесконтактного определения рельефа поверхности материалов - RU2606703C1
Код документа: RU2606703C1
Чертежи
Описание
Изобретение относится к области метрологии, в частности к системам для определения положения неровностей поверхности, их размеров и количества на расстоянии, и может быть использовано для сортировки и контроля качества материалов и готовой продукции в обувной, кожгалантерейной, текстильной, швейной промышленности и товароведении.
Известен способ бесконтактного определения размеров объекта с помощью фотограмметрии [Лобанов А.Н. Фотограмметрия: Учебник. - М.: Недра, 1984. - 552 с.]. Для определения размеров объекта с помощью фотограмметрии на негативе получают плоскостное отображение предмета, в котором пространственные изображения точек поверхности оказываются совмещенными в одной плоскости. Дальнейший анализ размерных признаков объекта производится по изображению объекта на фотографии, учитывая масштаб изображения и погрешности оптических приборов. Недостатком метода является значительное влияние на точность проводимых измерений качества применяемой оптической техники.
Известен способ аналоговой и цифровой стереофотограмметрии [Лобанов А.Н. Фотограмметрия: Учебник. - М.: Недра, 1984. - 552 с.], который содержит два главных этапа: получение информации с помощью фотограмметрической съемки и обработку полученной информации. Для определения координат точек объекта в пространстве съемку объекта осуществляют с разных позиций двумя или несколькими стереофотограмметрическими камерами. Используя геометрические свойства фотоснимков, по плоским прямоугольным координатам точек фотоснимков определяют пространственные координаты этих точек на фотографируемом объекте и, следовательно, его размеры, форму и взаимное расположение точек и элементов.
Недостатком стереофотограмметрии является значительное влияние на точность проводимых измерений качества применяемой оптической техники. Сохраняется необходимость учета оптических свойств камеры, соблюдения специальных требований к базису фотографирования и использования коэффициента масштабирования при определении размерных признаков объекта, что приводит к снижению точности получаемых измерений.
Известен метод определения рельефа поверхности [US 4758730 (A), 1988-07-19], в котором два или три источника света разного цвета направляют на изучаемый материал, освещают с разных сторон под острым углом, а затем определяют особенности рельефа. Известно оптическое измерительное устройство для измерения оптического представления поверхности материала, в частности поверхности человеческой кожи [RU 2446731 от 10.04.2007]. В основе принципа действия устройства лежит считывание информации об объекте, освещенном лучами света, падающими на объект под разными углами, и детектирование ответных лучей с помощью камеры и полусферического экрана. Таким образом, определяют свойства различных областей поверхности материала на различной глубине. К недостаткам описанного метода относится невозможность количественной оценки параметров поверхности и невозможность определения точного положения выявленных неровностей относительно друг друга.
Известен метод определения особенностей рельефа трехмерной формы поверхности материала, в котором используют свет нескольких длин волн, в том числе от двух источников, а затем с помощью математических соотношений определяют оттенок отраженного цвета, но которому определяется высота неровности рельефа [US 2004145753 (A1), 2004-07-29]. К недостаткам относится сложность точного определения положения каждой точки относительно друг друга и невозможность сортировки поверхности по качеству.
Прототипом изобретения является способ бесконтактного определения проекционных размеров объекта [RU 2311615 от 13.07.2005], включающий получение информации об объекте с помощью считывающего устройства, обработку информации, обработка информации дополнительно включает создание универсальной матрицы специальной поверхности -


Технической задачей изобретения является расширение и уточнение показателей, характеризующих сложную поверхность: положение неровностей, их размеры и количество, для определения качества изучаемой поверхности и дальнейшей сортировки.
Указанная задача решена за счет того, что в способе бесконтактного определения рельефа поверхности материалов, включающем получение информации об объекте с помощью считывающего устройства, обработку информации путем формирования универсальной матрицы поверхности, состоящей из информационных ячеек, содержащих информацию об эталонных и фактических координатах меток поверхности, согласно изобретению дополнительно формируют колористическую матрицу путем считывания информации с поверхности, освещенной двумя встречными световыми потоками с различной длиной волны, направленными к ней под острыми углами, информацию идентифицируют в соответствии с последовательностью цветов «первый цвет - смешение первого и второго цвета - второй цвет» как выпуклость на поверхности объекта, а последовательность «первый цвет - отсутствие цвета - второй цвет» как углубление на поверхности объекта, колористическую матрицу поверхности объекта накладывают на универсальную матрицу поверхности и фактическую матрицу объекта и получают топографическую карту поверхности объекта, затем по информации об эталонных координатах каждой метки, содержащейся в универсальной матрице поверхности, определяют размеры идентифицированных выпуклостей и углублений на поверхности объекта и рассчитывают их высоту, глубину и количество. Направляют световой поток перпендикулярно к исследуемой поверхности объекта с внутренней стороны, считывают информацию о прошедших через поверхность исследуемого объекта лучах и идентифицируют ее как сквозные отверстия на поверхности исследуемого объекта, совмещают информацию о сквозных отверстиях на поверхности объекта с фактической матрицей объекта и получают топографическую карту объекта с точным положением сквозных отверстии, при этом сравнивают координаты и размеры полученных отверстий с ранее определенными координатами и размерами углублений и идентифицируют совпавшие координаты как сквозные отверстия.
Способ реализуют следующим образом: создают поверхность, содержащую метки и информацию об эталонных метрических координатах каждой метки, фиксируют эталонную информацию о поверхности, содержащей метки, в виде эталонной матрицы поверхности, состоящей из информационных ячеек, содержащих информацию об эталонных координатах каждой метки, устанавливают поверхность, содержащую метки, перпендикулярно или под углом, близким к прямому, к оптической оси считывающего устройства, используемого для получения информации об объекте, так, чтобы указанная поверхность или ее часть находилась в зоне охвата считывающего устройства, считывают с помощью считывающего устройства информацию об указанной поверхности и получают фактическую матрицу поверхности, состоящую из информационных ячеек, содержащих информацию о фактических координатах каждой метки, получают универсальную матрицу поверхности, содержащей метки, состоящую из информационных ячеек, содержащих информацию об эталонных и фактических координатах каждой метки, располагают объект на месте расположения поверхности, содержащей метки, в зоне охвата считывающего устройства так, чтобы положение считывающего устройства относительно указанной поверхности не изменилось, после получения фактической информации об объекте с помощью считывающего устройства ее накладывают на универсальную матрицу поверхности и получают фактическую матрицу объекта, состоящую из информационных ячеек универсальной матрицы поверхности, покрытых изображением объекта, и по информации об эталонных координатах каждой метки, содержащейся в универсальной матрице поверхности, определяют координаты каждой точки объекта. Направляют два встречных световых потока разной длины волны на объект под острыми углами, идентифицируют информацию о поверхности объекта в соответствии с последовательностью цветов «первый цвет - смешение первого и второго цвета - второй цвет» как выпуклость на поверхности объекта, а последовательность «первый цвет - отсутствие цвета - второй цвет» как углубление на поверхности объекта и получают колористическую матрицу поверхности объекта. Накладывают колористическую матрицу поверхности объекта на универсальную матрицу поверхности и фактическую матрицу объекта и получают топографическую карту поверхности объекта, затем по информации об эталонных координатах каждой метки, содержащейся в универсальной матрице поверхности, определяют размеры идентифицированных выпуклостей и углублений на поверхности объекта и рассчитывают их высоту и количество.
Создают эталонную матрицу специальной поверхности, которая представляет собой заданную математической функцией математическую модель специальной поверхности, состоящую из информационных ячеек, несущих информацию об эталонных координатах каждой метки специальной поверхности.
На специальную поверхность в соответствии с эталонной матрицей наносят строго определенное количество метрической информации в виде меток, представляющих собой некие объекты, распознаваемые на данной поверхности считывающим устройством, и получают материальную матрицу специальной поверхности. В качестве метки может использоваться точка, геометрическая фигура заданной формы и/или цвета, линия штрихкода, элемент оптической записи и т.д. и их всевозможные сочетания между собой. Метка должна быть выполнена в виде, доступном для распознавания считывающим устройством. Материальная матрица представляет собой материальный объект с нанесенными на него метками. Материальная матрица может быть изготовлена из листа бумаги, стекла, ткани, кристаллической решетки и т.д.
Материальную матрицу устанавливают перпендикулярно относительно направления оптической оси считывающего устройства так, чтобы она находилась в зоне охвата считывающего устройства.
Считывающее устройство устанавливают стационарно относительно материальной матрицы. В качестве считывающего устройства могут быть использованы: фотоаппарат, цифровая фото- или видеокамера, проекционный сканер и т.д. Считывают информацию о материальной матрице, которую передают в базу данных компьютера, таким образом получают фактическую матрицу специальной поверхности, которая представляет собой математическую модель поверхности, состоящую из информационных ячеек, и содержит в себе фактические координаты каждой метки специальной поверхности со всеми искажениями и погрешностями используемого оборудования.
Отождествляют эталонную и фактическую матрицу специальной поверхности между собой, при этом получают универсальную матрицу специальной поверхности, которая представляет собой математическую модель поверхности, состоящую из информационных ячеек, несущих в себе одновременно парную информацию - информацию об эталонных и фактических координатах каждой метки специальной поверхности.
Материальную матрицу удаляют из зоны охвата считывающего устройства, а на ее месте располагают исследуемый объект. При этом положение считывающего устройства остается неизменным.
С помощью считывающего устройства получают отображение поверхности объекта в виде информации, которую вводят в базу данных компьютера.
Затем получают фактическую матрицу объекта путем наложения фактической информации об объекте, полученной с помощью считывающего устройства, на универсальную матрицу поверхности.
Так как каждая ячейка универсальной матрицы поверхности несет в себе и эталонную метрическую информацию, то программным путем определяют любые размеры и координаты любой точки исследуемого объекта. Направляют на исследуемый объект два встречных световых потока разной длины волны под острыми углами к поверхности объекта, идентифицируют информацию о поверхности объекта в соответствии с последовательностью цветов «первый цвет - смешение первого и второго цвета - второй цвет» как выпуклость на поверхности объекта, а последовательность «первый цвет - отсутствие цвета - второй цвет» как углубление на поверхности объекта и получают колористическую матрицу поверхности объекта. Накладывают колористическую матрицу поверхности объекта на универсальную матрицу поверхности и фактическую матрицу объекта и получают топографическую карту поверхности объекта, затем по информации об эталонных координатах каждой метки, содержащейся в универсальной матрице поверхности, определяют координаты и размеры идентифицированных выпуклостей и углублений на поверхности объекта и рассчитывают их высоту, глубину и количество.
Два встречных световых потока разной длины волны под острыми углами к поверхности объекта направляют на лицевую и/или изнаночную сторону поверхности объекта.
Дополнительно направляют световой ноток перпендикулярно к исследуемой поверхности объекта с изнаночной стороны, считывают информацию о прошедших через поверхность исследуемого объекта лучах и идентифицируют ее как сквозные отверстия на поверхности исследуемого объекта, совмещают информацию о сквозных отверстиях на поверхности объекта с фактической матрицей объекта, универсальной матрицей поверхности и топографической картой поверхности объекта, затем по информации об эталонных координатах каждой метки, содержащейся в универсальной матрице поверхности, определяют координаты и размеры сквозных отверстий на топографической карте поверхности объекта.
Пример реализации способа для определения неровностей поверхности кожи страуса.
Блок I - используется однократно при настройке оборудования.
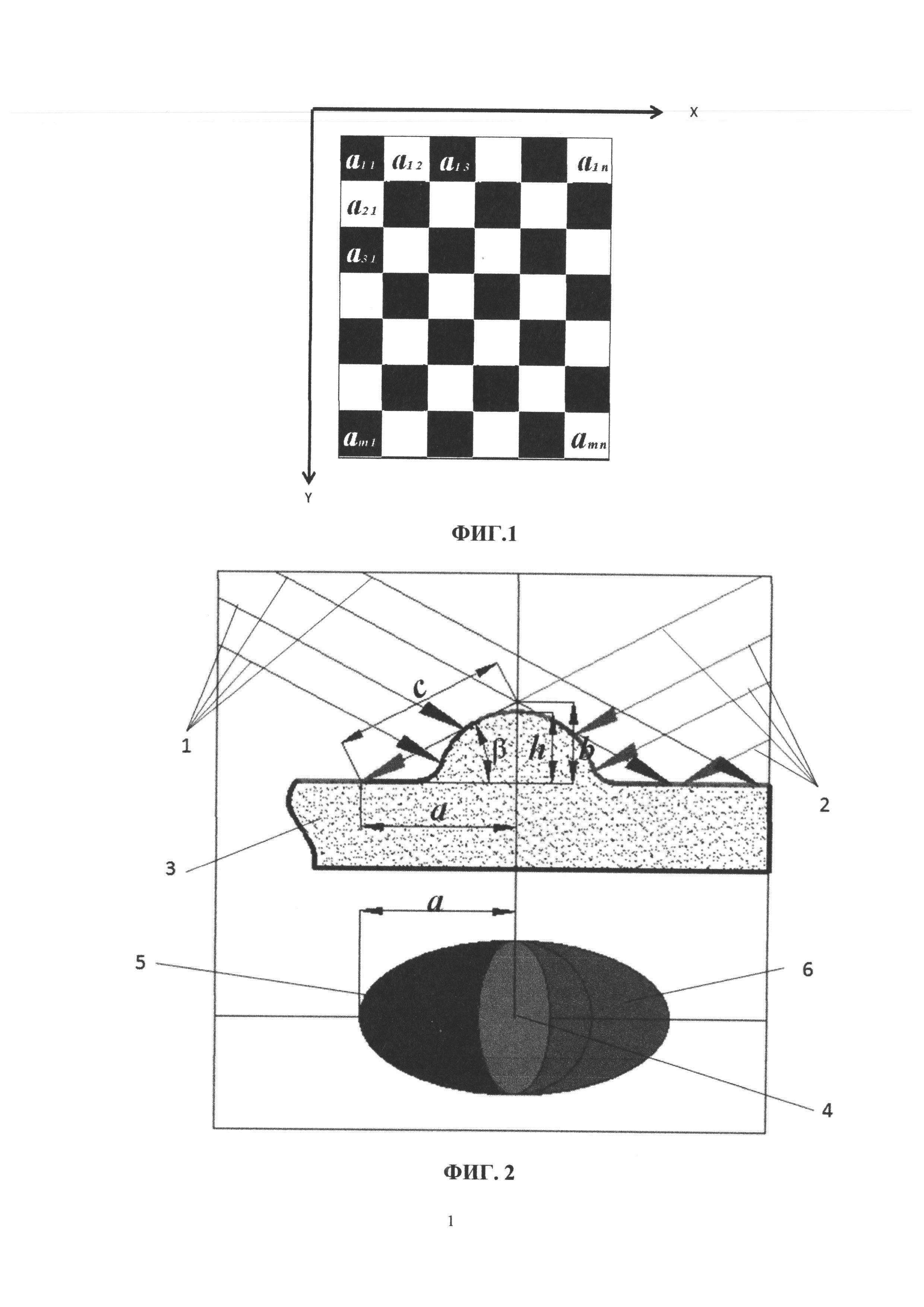
Задают эталонную матрицу в виде математической модели, например, из геометрических элементов размером m×n, это совокупность меток, например, квадратной формы двух контрастных цветов, расположенных в виде прямоугольной таблицы из m строк и n столбцов. Сочетание цветов меток может быть различным, в том числе сочетание белого и черного или зеленого и красного цветов. Размер эталонной матрицы A (m, n) определяется размерами изучаемого объекта и масштабом используемых меток. Размер меток определяется разрешающей способностью считывающего устройства. Фрагмент эталонной матрицы из геометрических меток черного и белого цветов представлен на фиг. 1.
Подготавливают материальную матрицу путем нанесения на специальную поверхность меток, соответствующих эталонной матрице, например печатают метки с помощью принтера на листе бумаги.
Устанавливают материальную матрицу, например укладывают лист бумаги с метками на прозрачный стол.
Устанавливают считывающее устройство, например цифровую фотокамеру, чтобы в его зоне охвата оказалась материальная матрица (лист бумаги с метками).
Получают отображение материальной матрицы с помощью считывающего устройства.
Формируют универсальную матрицу поверхности в виде математической модели, содержащей парную информацию о координатах каждой метки эталонной и материальной матриц, путем определения с помощью программного обеспечения эталонных координат каждой отображенной метки материальной матрицы.
Удаляют материальную матрицу из зоны охвата считывающего устройства.
Блок II
Не изменяют положение считывающего устройства.
Укладывают кожу страуса лицевой стороной к считывающему устройству на место удаленной материальной матрицы.
Получают отображение исследуемого объекта (кожи страуса).
С помощью программного обеспечения соотносят метки универсальной матрицы поверхности с отображением кожи страуса. Благодаря тому, что каждая метка универсальной матрицы поверхности содержит эталонную метрическую информацию, определяют размеры и координаты любой точки исследуемой поверхности кожи страуса.
Фиксируют информацию о координатах контура кожи страуса и получают контур топографической карты кожи страуса без учета неровностей поверхности кожи страуса.
Два встречных световых потока 1 и 2 разной длины волны направляют, как показано на фиг. 2, на лицевую поверхность кожи страуса под острыми углами, заданными заранее.
С помощью считывающего устройства получают информацию о лицевой поверхности кожи страуса, покрытой световыми потоками.
На фиг. 2 показано, что световой поток 1 при падении на лицевую поверхность кожи страуса встречает препятствие в виде перьевой фолликулы. Со стороны, противоположной падению луча светового потока 1, образуется тень от фолликулы 6. Аналогично световой поток 2, падающий с противоположной стороны, также образует тень 5. При этом тень 6 от светового потока 1 будет освещена встречным потоком света 2, а тень 5 от светового потока 2 будет освещена световым потоком 1. Вершина фолликулы 4 освещена световыми потоками 1 и 2 одновременно и является зоной наложения световых потоков друг на друга. Аналогично ровные участки лицевой поверхности кожи страуса также освещены световыми потоками 1 и 2 одновременно.
Используют принципы колориметрии и определяют наличие групп, содержащих следующую последовательность цветов: «первый цвет - смешение первого и второго цвета - второй цвет». Идентифицируют каждую группу как одну перьевую фолликулу, в которой вершина находится в центре зоны смешения цветов.
Идентифицируют информацию о лицевой поверхности кожи страуса в соответствии с последовательностью цветов «первый цвет - смешение первого и второго цвета - второй цвет» как выпуклость на лицевой поверхности кожи страуса, а последовательность «первый цвет - отсутствие цвета - второй цвет» как углубление на лицевой поверхности кожи страуса и получают колористическую матрицу лицевой поверхности кожи страуса.
Накладывают колористическую матрицу лицевой поверхности кожи страуса на универсальную матрицу поверхности и фактическую матрицу кожи страуса и получают топографическую карту лицевой поверхности кожи страуса, затем по информации об эталонных координатах каждой метки, содержащейся в универсальной матрице поверхности, определяют размеры идентифицированных выпуклостей и углублений на лицевой поверхности кожи страуса и рассчитывают их высоту, глубину и количество.
Для этого определяют проекционные размеры участка, освещенного световым потоком 1 или 2, от середины зоны смешения цветов 4, выделенной как вершина перьевой фолликулы (выпуклости). На фиг. 2 отражена геометрическая взаимосвязь проекционных размеров освещенных потоками 1 и 2 участков фолликулы с ее вершиной. Путем простейших геометрических вычислений, известных из соотношения углов и сторон прямоугольного треугольника, образованного сторонами a, b, c и углом β (фиг. 2), определяют высоту стороны b каждого треугольника по формуле
b=a×ctgβ.
Для расчета высоты фолликулы h вводят поправочный коэффициент k, определенный эмпирически:
h=k×b, где k=0,86.
Достоверность определения высоты фолликулы, рассчитанная таким способом, лежит в пределах допустимой погрешности 2%.
Предлагаемый способ наиболее применим на начальных стадиях отделки кожи страуса до операции крашения. В случае необходимости оценки качества окрашенной кожи цвет используемых световых потоков не должен совпадать с цветом оцениваемой кожи. Например, для кожи красного цвета используют световые потоки синего и зеленого цветов.
Дополнительно направляют световой поток перпендикулярно к исследуемой поверхности объекта с изнаночной стороны кожи страуса, считывают информацию о прошедших через кожу страуса лучах и идентифицируют ее как сквозные отверстия на поверхности кожи страуса, совмещают информацию о сквозных отверстиях на поверхности кожи страуса с фактической матрицей объекта, универсальной матрицей поверхности и топографической картой поверхности кожи страуса, затем по информации об эталонных координатах каждой метки, содержащейся в универсальной матрице поверхности, определяют координаты и размеры сквозных отверстий на топографической карте поверхности кожи страуса, при этом сравнивают координаты и размеры полученных отверстий с ранее определенными координатами и размерами углублений и идентифицируют совпавшие координаты как сквозные отверстия.
Дополнительно направляют два встречных световых потока под острым углом на изнаночную (бахтармяную) сторону кожи страуса, создают колористическую матрицу изнаночной стороны кожи страуса, накладывают колористическую матрицу изнаночной поверхности кожи страуса на универсальную матрицу поверхности и фактическую матрицу кожи страуса и получают топографическую карту изнаночной поверхности кожи страуса, затем по информации об эталонных координатах каждой метки, содержащейся в универсальной матрице поверхности, определяют размеры идентифицированных выпуклостей и углублений на изнаночной поверхности кожи страуса и рассчитывают их высоту, глубину и количество.
Таким образом получают полную топографическую карту кожи страуса, включающую неровности поверхности лицевой стороны кожи страуса, неровности поверхности изнаночной стороны кожи страуса и сквозные отверстия на коже страуса.
Благодаря предлагаемому методу возможно с высокой степенью точности определять качество кожи страуса и выполнять сортировку кож, так как он достоверно позволяет рассчитать плотность расположения перьевых фолликул и их концентрацию на отдельных топографических участках кожи.
Предложенный способ обеспечивает возможность получения дополнительных, уточненных данных о рельефе поверхности кожи страуса в современном цифровом формате, позволяя визуализировать топографическую карту кожи и осуществлять контроль качества кожи, сортировку кож и раскрой деталей изделий на принципиально новом уровне.
Благодаря предлагаемому способу возможно с высокой степенью точности определять качество материалов и выполнять сортировку, так как он достоверно позволяет рассчитать плотность расположения и концентрацию неровностей на отдельных топографических участках материалов. Предложенный способ обеспечивает возможность получения точных данных о рельефе поверхности материалов: положение неровностей, их размеры и количество в современном цифровом формате, позволяя визуализировать топографическую карту материалов.
Реферат
Изобретение относится к области метрологии, в частности к системам для определения положения неровностей поверхности, их размеров и количества на расстоянии. Заявленный способ бесконтактного определения рельефа поверхности материалов включает получение информации об объекте с помощью считывающего устройства, обработку информации путем формирования универсальной матрицы поверхности, состоящей из информационных ячеек, содержащих информацию об эталонных и фактических координатах меток поверхности. При этом дополнительно формируют колористическую матрицу путем считывания информации с поверхности, освещенной двумя встречными световыми потоками с различной длиной волны, направленными к ней под острыми углами, информацию идентифицируют в соответствии с последовательностью цветов «первый цвет - смешение первого и второго цвета - второй цвет» как выпуклость на поверхности объекта, а последовательность «первый цвет - отсутствие цвета - второй цвет» как углубление на поверхности объекта. Далее колористическую матрицу поверхности объекта накладывают на универсальную матрицу поверхности и фактическую матрицу объекта и получают топографическую карту поверхности объекта, затем по информации об эталонных координатах каждой метки, содержащейся в универсальной матрице поверхности, определяют размеры идентифицированных выпуклостей и углублений на поверхности объекта и рассчитывают их высоту, глубину и количество. Технический результат - расширение и уточнение показателей, характеризующих сложную поверхность. 1 з.п. ф-лы, 2 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для бесконтактного контроля и распознавания поверхностей трехмерных объектов
Комментарии