Контроль предварительного натяжения - RU2467284C2
Код документа: RU2467284C2
Чертежи





Описание
Область техники изобретения
Изобретение относится к датчику и, в частности, к системе контроля натяжения, предназначенной для контроля механического предварительного натяжения в материале методом видеоконтроля.
Уровень техники изобретения
В известных методах измерения напряжения, вызванного силами, прикладываемыми к материалу, например, крутящим моментом или линейной деформацией, на материале, подлежащем измерению, закрепляют датчики, а затем устанавливают электрическую связь между датчиками и электронными средствами согласования и анализа. Недостатком этих решений является необходимость поддерживать достаточно качественную электрическую связь в течение времени, что представляет проблему, например, в применениях, связанных с вращающимися деталями, образующими интересующий объект, тогда как электронное средство согласования и анализа остается неподвижным. Типичным примером такой ситуации являются тензометры с применением резистивных методов измерения крутящего момента на вращающемся валу, при этом используются токосъемные кольца для соединения датчиков с электроникой, и качество этих токосъемных колец со временем ухудшается из-за износа в области контакта. Кроме того, тензодатчики достаточно дорогие, и их применение ограничено определенными испытательными замерами и не подходит для обычных установок. Тензодатчик можно использовать для обнаружения натяжения, вызванного в материалах механическими силами.
Для этой цели было разработано множество различных методов, направленных на повышение качества и/или разрешения. Были разработаны сенсорные системы с использованием различных форм магнитных связей, емкостных связей, а также с использованием видеосистемы. Каждое из этих решений имеет собственные недостатки, такие как подверженность воздействию внешних источников или ошибок, низкое разрешение, высокая стоимость и недостаточная надежность.
Например, методы с использованием видеосистемы часто имеют низкое разрешение и/или требуют сложных и дорогих оптических и механических устройств. Однако преимущество методов с использованием видеосистемы заключается в том, что их легче использовать в нестационарных применениях, т.е. там, где не требуется постоянная установка устройства захвата изображения в одном положении относительно измеряемого объекта, а допускается его снятие с последующим (по времени) возвращением на место для выполнения новых измерений.
Одно такое решение представлено в документе JP1131406, в котором устройство захвата изображения обнаруживает рисунок с муаровыми полосами и определяет напряжение по расстоянию между полосами. Однако этот метод требует высококачественной оптики, и его можно использовать для измерения напряжения каждый раз только в одном направлении.
Другой пример описан в WO9414029, в котором раскрыта измерительная система для анализа напряжения в трехмерных фигурных элементах. В этой системе используется модель СММ с камерой, которая измеряет рисунок, сформированный на интересующем объекте. Это дорогое и механически сложное решение, поскольку требуется калибровка рисунка, и к тому же оно имеет низкое разрешение.
Еще одно решение с использованием видеосистемы для измерения деформации и напряжения в объекте описано в документе FR2823849.
В документе FR2835603 описано решение с использованием видеосистемы для измерения смещения и/или деформации объекта. Однако в этом документе не упоминается измерение напряжения.
В документе WO 2007/073272 описаны устройство, способ и система для определения положения объекта, в частности, с использованием видеосистемы и рисунка, содержащего данные абсолютного положения.
В основу настоящего изобретения положена задача решить по меньшей мере одну из указанных проблем.
Сущность изобретения
Поставленная задача решается несколькими аспектами настоящего изобретения, первым из которых является система контроля натяжения, содержащая
объект, являющийся частью крепежного средства, закрепляющего первый объект относительно второго объекта, снабженный по меньшей мере одним рисунком, расположенным на поверхности объекта и содержащим части рисунка, расположенные относительно друг друга с расстоянием между частями рисунка в линейном масштабе, пригодном для обнаружения натяжения в пределах заранее определенного диапазона и разрешения, при этом части рисунка содержат множество точек, и причем каждая из них расположена неподвижно на объекте;
по меньшей мере одну камеру (4, 33, 33', 701) для захвата по меньшей мере одного изображения по меньшей мере одного рисунка (3, 23, 32, 32', 704), расположенного на объекте (2, 22, 31, 707);
вычислительное устройство (500), выполненное с возможностью приема видеоинформации от по меньшей мере одной камеры;
при этом вычислительное устройство выполнено с возможностью анализа захваченного изображения для обнаружения положения каждой точки рисунка с помощью алгоритма анализа изображения, позволяющего определить геометрический центр точки посредством метода обнаружения контраста, определения расстояния между по меньшей мере двумя частями рисунка, и вычисления натяжения, вызванного в объекте, с использованием контрольного значения расстояния между двумя частями рисунка, когда объект находится в механически ненапряженном состоянии.
Рисунок может дополнительно содержать информационные точки.
Информационные точки могут содержать информацию по меньшей мере об одном из относительных положений на объекте, расстояние до по меньшей мере одной соседней точки и калибровочную информацию.
Вычислительное устройство может быть дополнительно выполнено с возможностью получения информации, относящейся к расстоянию между камерой и объектом.
Вычислительное устройство может быть выполнено с возможностью компенсации эффектов расстояния при вычислении напряжения.
Согласно следующему аспекту настоящего изобретения предложено устройство для определения напряжения, содержащее
по меньшей мере одну камеру для захвата по меньшей мере одного изображения по меньшей мере одного рисунка, расположенного на интересующем объекте, при этом рисунок содержит множество точек, и причем каждая из них расположена на объекте так, чтобы следовать за движением объекта;
вычислительное устройство;
при этом вычислительное устройство выполнено с возможностью анализа захваченного изображения для обнаружения положения каждой точки изображения с помощью алгоритма, позволяющего определить геометрический центр точки, используя метод обнаружения контраста, определения расстояния между по меньшей мере двумя точками рисунка и вычисления напряжения, вызванного в объекте, с использованием контрольного значения расстояния в ненапряженном состоянии между двумя точками рисунка.
Рисунок может дополнительно содержать информационные точки.
Информационные точки могут содержать информацию по меньшей мере об одном из относительных положений на объекте, расстояние до по меньшей мере одной соседней точки и калибровочную информацию.
Вычислительное устройство может быть дополнительно выполнено с возможностью получения информации, относящейся к расстоянию между камерой и объектом.
Вычислительное устройство может быть выполнено с возможностью компенсации эффектов расстояния при вычислении напряжения.
Согласно следующему аспекту изобретения предложен способ обнаружения напряжения в объекте, заключающийся в том, что
обеспечивают механическим путем рисунок с изменением контраста на объекте;
захватывают по меньшей мере одно изображение рисунка;
анализируют рисунок;
определяют геометрические центры точек рисунка;
измеряют расстояние между по меньшей мере двумя точками рисунка;
вычисляют расстояние между двумя точками рисунка в ненапряженном состоянии с использованием контрольного значения;
вычисляют напряжение в объекте как функцию измеренного и вычисленного расстояний.
Согласно следующему аспекту изобретения предложена компьютерная программа, хранящаяся в машиночитаемой памяти и исполняемая в процессорном устройстве, для обнаружения напряжения в объекте, содержащая набор команд для
захвата по меньшей мере одного изображения рисунка с помощью камеры, соединенной непосредственно или косвенно с процессорным устройством;
анализа рисунка;
определения геометрических центров точек рисунка;
измерения расстояния между по меньшей мере двумя точками рисунка;
вычисления расстояния между двумя точками рисунка в ненапряженном состоянии с использованием контрольного значения;
вычисления напряжения в объекте как функции измеренного и вычисленного расстояний;
представления вычисленного напряжения.
Согласно следующему аспекту изобретения предложена система для контроля напряжения в объекте, содержащая
объект;
рисунок с изменением контраста, расположенный на поверхности объекта;
камеру для захвата изображений рисунка;
вычислительное устройство, присоединенное к камере;
причем вычислительное устройство выполнено с возможностью анализа захваченного изображения для определения положения каждой точки рисунка с помощью алгоритма, позволяющего определить геометрический центр точки методом обнаружения контраста, определения расстояния между по меньшей мере двумя точками рисунка и вычисления напряжения, вызванного в объекте.
Кроме того, настоящее изобретение может быть реализовано в шайбе для использования в крепежном узле, содержащей упругий материал и имеющей на поверхности рисунок из множество точек с изменениями контраста, пригодный для определения геометрических центров каждой точки рисунка, причем рисунок выполнен так, чтобы подвергаться воздействию вызванного напряжения в шайбе.
Преимущество настоящего изобретения состоит в том, что оно позволяет измерять напряжение одновременно в нескольких направлениях. Можно сделать замеры с помощью одного и того же устройства обнаружения в нескольких местах и получить геометрический профиль напряжения. Можно также получать измерения других параметров, таких как различные виды деформации (линейная, изгиба, крутящего момента и момента в линейных применениях) и положение объекта относительно устройства обнаружения.
Можно получать информацию, идентифицирующую объект, и/или калибровочные данные, закодированные в рисунке, расположенном на объекте.
Краткое описание чертежей
Настоящее изобретение будет описано далее более подробно в неограничительном виде со ссылками на примерные варианты его осуществления, проиллюстрированные на прилагаемых чертежах, на которых
фиг.1 иллюстрирует схематически систему датчика напряжения согласно первому варианту настоящего изобретения;
фиг.2 иллюстрирует схематически систему датчика напряжения согласно второму варианту настоящего изобретения,
фиг.3A иллюстрирует схематически датчик крутящего момента согласно настоящему изобретению,
фиг.3B изображает схематически частичный вид сбоку по фиг.3A,
фиг.4 иллюстрирует схематически способ согласно настоящему изобретению,
фиг.5 иллюстрирует схематически измерительное устройство согласно настоящему изобретению,
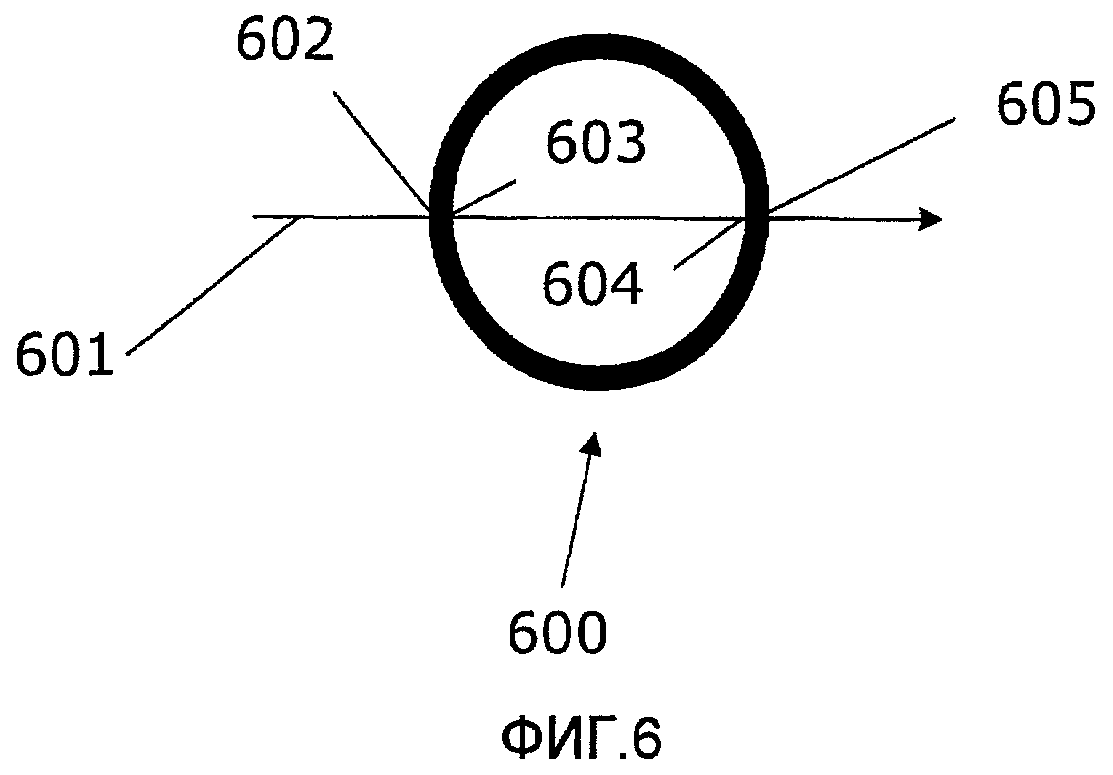
фиг.6 иллюстрирует схематически деталь узловой точки рисунка, использованную в настоящем изобретении,
фиг.7 иллюстрирует схематически систему линз согласно настоящему изобретению, и
фиг.8 иллюстрирует схематически другой вариант настоящего изобретения.
Подробное описание предпочтительных вариантов осуществления изобретения
На фиг.1, иллюстрирующей датчик напряжения или систему 1 контроля натяжения согласно настоящему изобретению, позицией 2 показан объект, в котором некоторый механический процесс вызывает напряжение (основное направление напряжения показано стрелкой 6 на фиг.1), представляющее интерес для измерения. На объекте имеется рисунок 3, содержащий узловые точки и факультативно точки положения/информации. Рисунок будет более подробно обсуждаться ниже. Устройство захвата изображения (например, камера) 4 обнаруживает рисунок и посылает сигнал, относящийся к рисунку, в устройство анализа для анализа изображения. Устройство анализа может быть встроено в один и тот же корпус 5 системы датчика вместе с камерой 4. Устройство анализа определяет положение каждой отдельной части рисунка, предпочтительно с помощью центроидного алгоритма или алгоритма, определяющего геометрический центр части рисунка. Из этого анализа можно определить положение рисунка на объекте; если рисунок уникально закодирован, то можно также идентифицировать объект и можно определить механическое положение части рисунка относительно других частей рисунка, т.е. зная механическое положение частей рисунка в ненапряженном состоянии, можно определить напряжение, вызванное в объекте между частями рисунка.
Далее будут описаны несколько примеров применения изобретения.
В первом примере применения напряжение/натяжение измеряют относительно объекта, который подвергается воздействию статического или полустатического натяжения, осуществляемого посредством некоторых сил в системе, вызывающих напряжение материала. Например, на болт и гайку, используемые для удержания другого объекта, действует напряжение во время работы гайки. Это напряжение/натяжение можно измерять на гайке, головке болта или на отдельной шайбе, вставленной между гайкой или головкой болта и другим объектом (объектом, который должен быть закреплен посредством гайки с болтом). Понятно, что можно обойтись без гайки, если резьба болта вставляется в резьбовую приемную часть, расположенную на зафиксированном объекте, к которому нужно прикрепить другой объект. Например, предположим, что нужно прикрепить колесо к машине. Колесо часто присоединяют с помощью множества болтов, вставляемых в приемные отверстия в колесе с одной стороны, в то время как на другой стороне колеса расположено множество приемных элементов, которые имеют резьбу, чтобы зафиксировать болты, ввинченные в эти приемные элементы. Можно расположить шайбу между болтом и колесом, и напряжение, вызываемое во время операции затягивания, будет передаваться также и шайбе. Можно использовать испытательный прибор для проверки текущего состояния напряжения, чтобы гарантировать водителю, что каждый болт, удерживающий колеса, достаточно туго затянут. Следующим примером, в котором применяется такое решение, является закрепление цилиндрической головки мотора, если нужно обеспечить равномерное и симметричное закрепление цилиндрической головки относительно блока двигателя.
Существуют области техники, в которых важно, чтобы каждый болт, фиксирующий конструкцию, был туго затянут, и чтобы эти болты сохраняли определенную степень плотности посадки (т.е. определенную степень напряжения в фиксирующей структуре). К этим областям относятся сосуды под давлением, большие подшипники, используемые на буровых установках в нефтедобывающей промышленности, большие краны на стройплощадках, а также везде, где может произойти авария, если откажет один или несколько болтов. Например, в нефтедобывающей промышленности существуют страховые требования к проверке работы каждого болта в несущих конструкциях, и это также относится к корпусам высокого давления в атомной энергетике. Поэтому существует потребность в быстром и надежном средстве для измерения напряжения в болтах.
На фиг.2 показан вид сбоку примерного варианта, описанного выше: винт/болт 27 с резьбовой частью 28, которая входит в резьбовую часть (не показана) в объекте 29. Шайба 22, содержащая рисунок 23, посажена между головкой 20 винта и объектом 29. Винт и объект можно рассматривать как крепежный узел 21. Камера 4 с устройством анализа (описанным в связи с фиг.1) и корпус 5 предусмотрены для захвата изображений рисунка. Шайба с рисунком и камера с корпусом показаны в этом варианте как узел 21 датчика. Когда винт/болт закрепляется в объекте, в винте и шайбе возникает натяжение. Это натяжение приводит к изменению геометрического размера шайбы, что, в свою очередь, будет влиять на относительное положение частей рисунка. Например, если рисунок содержит точки, то изменится расстояние между центрами точек. Это изменение расстояния можно обнаружить с помощью центроидного алгоритма, упомянутого выше, следовательно, можно определить прилагаемое натяжение.
Закрепление винта/болта в объекте можно осуществить либо посредством вращения винта с помощью, например, гаечного ключа, либо с помощью болтового натяжного устройства (такого как гидрокулачок), как будет понятно специалистам. Болтовое натяжное устройство действует посредством приложения сил тяги к болту, после того как он был затянут вручную на объекте с шайбой между головкой болта и объектом. При применении силы тяги болт растягивается, и шайба слегка ослабляется. При закреплении шайбы (которая имеет внутреннюю резьбу, сопряженную с резьбой винта) на объекте путем ее привинчивания к объекту и снятия силы тяги после этого, создается предварительное натяжение. Следует отметить, что шайба необязательно должна навинчиваться на резьбу, ее можно установить во время приложения силы тяги; в этом случае шайба должна иметь открытую часть, чтобы ее можно было прижать под головкой винта. Обычно при применении болтового натяжного устройства болт представляет собой чеку с гайкой, притягиваемой к шайбе; однако можно использовать и другие решения, в которых может использоваться шайба.
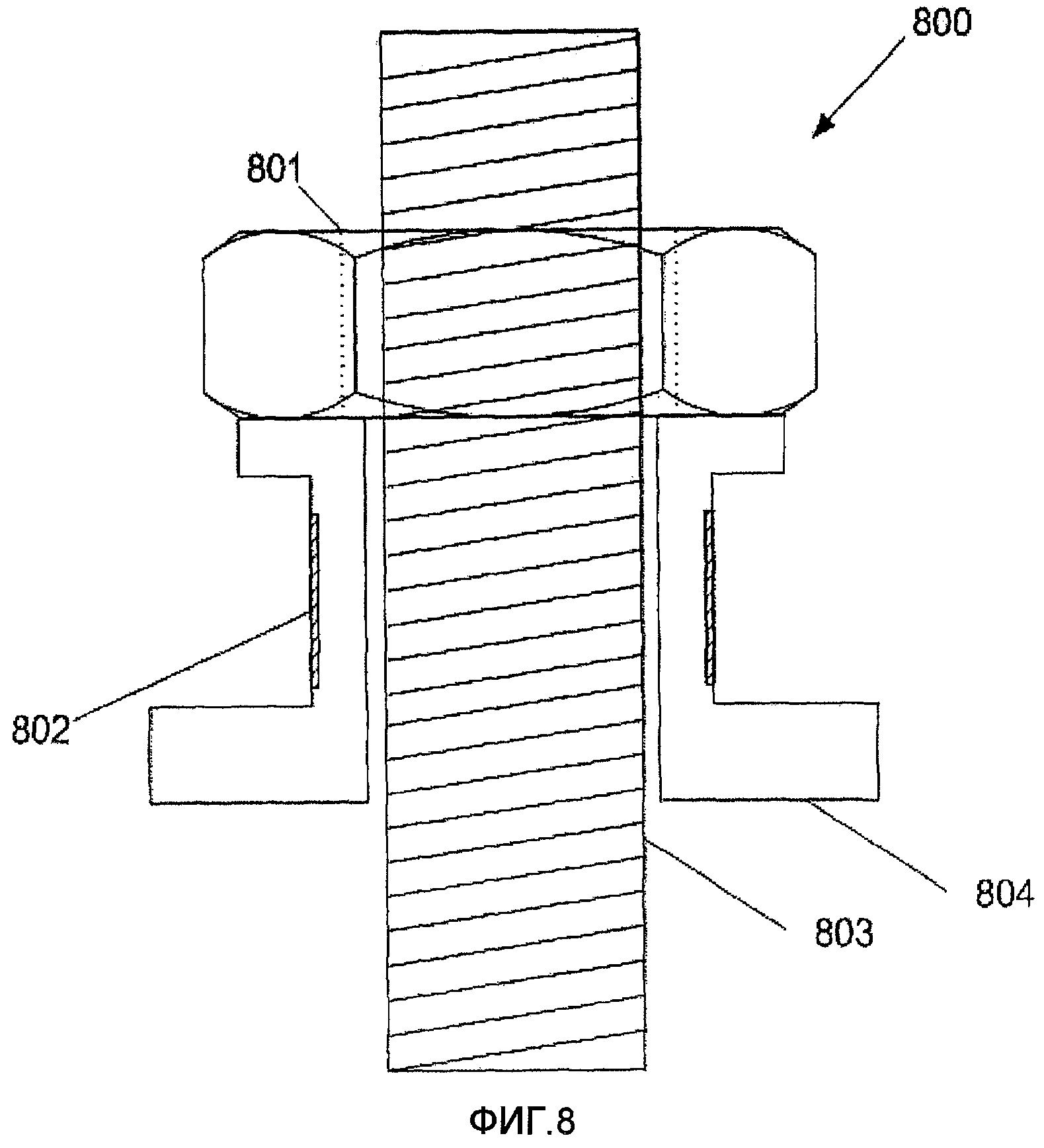
Следует отметить, что в другом варианте настоящего изобретения шайбу можно подходящим образом ввести в гайку, чтобы силы, действующие во время натяжения, передавались через шайбовую часть гайки. Фиг.8 иллюстрирует один пример, в котором использован узел гайка/шайба. Можно также выполнить головку болта с шайбой (не показано). Фиг.8 будет обсуждаться более подробно ниже.
Этот вариант осуществления настоящего изобретения с шайбой и/или болтом с установленной шайбой можно успешно применять для размеров, относящихся к системам M10 или больше, например M16 и M20 и т.д. Однако изобретение не ограничено этим диапазоном, оно также применимо и для меньших размеров. Кроме того, настоящее изобретение не ограничено метрическими конфигурациями, а может применяться для любой системы: указание метрики M20 служит только для иллюстрации примерного размера.
Как отмечалось выше, обнаружение выполняется на элементах, несущих нагрузку, которые могут быть частью объекта, например болта или комбинации шайба/винт; кроме того, обнаружение может выполняться непосредственно на объекте, например на несущей части шарикового подшипника; при установке подшипника на валу его можно зафиксировать методом обжатия, следовательно, внутреннее (или внешнее) кольцо подшипника подвергается воздействию сил, обуславливающих предварительное натяжение системы.
Узел камера-устройство анализа можно устанавливать постоянно вместе с шайбой или применять как модуль, используемый периодически при полевых проверках натяжения на крепежном узле 21. Например, инспектор может иметь в своем распоряжении зонд (содержащий камеру, устройство анализа и дисплей для отображения обнаруженного значения натяжения) во время выезда к оборудованию, требующему проверки. Инспектор приближается к испытываемому оборудованию и вводит зонд в приспособление (не показано), расположенное относительно рисунка с образованием жесткого приемного патрона для обеспечения высокой воспроизводимости измерений при извлечении и последующем повторном вставлении зонда.
Патрон или направляющая позволяет позиционировать зонд на фиксированном расстоянии от рисунка, при этом расстояние будет оставаться одинаковым между различными измерениями, так как изменение расстояния между камерой и рисунком привело бы к ошибочному измерению; расстояние между точками рисунка в полученном изображении будет изменяться в зависимости от расстояния между камерой и рисунком, а также от приложенного натяжения.
Эту ошибку можно дополнительно уменьшить, используя соответствующие линзы в камере. Линзовый узел 35 (показанный на фиг.7) может содержать одну линзу 702, расположенную в связи с камерой 701, и одну линзу 703, расположенную в связи с рисунком 704. При такой компоновке линз параллельный луч 705 света передается от рисунка в камеру так, что система определения практически не зависит от расстояния 705 между камерой и рисунком, поскольку расстояние 706 между первой линзой 702 и камерой 701 постоянное и расстояние 708 между второй линзой 703 и рисунком 704 также постоянное. В альтернативном варианте не предусмотрено никакого патрона, но сенсорная система зависит от описанной системы линз.
Дополнительно или комплементарно можно применять анализ изображений с использованием самого рисунка в качестве образца для определения расстояния между камерой и рисунком, используя тот факт, что напряжение, вызванное натяжение, действует в основном в определенном направлении и влияет на расстояние между точками рисунка в основном в одном направлении, оставляя расстояния между точками в другом направлении более или менее неизменными, или путем анализа взаимосвязи между различными точками части рисунка. То есть путем определения расстояния между точками в направлении, не подвергшемся воздействию, можно получить расстояние от камеры до рисунка, так как расстояние между точками рисунка в ненапряженном состоянии известно. Еще одно решение заключается в определении расстояния с помощью какого-либо другого измерения, например, с помощью механического устройства (такого, как винт микрометра или аналогичное устройство измерения длины) или оптического измерительного устройства (например, лазерного).
Для дополнительного повышения чувствительности и разрешения датчика напряжения можно использовать датчик температуры, чтобы определить воздействия температуры на систему и объект.
Кроме того, можно производить замеры в нескольких положениях по периметру шайбы и усреднять эти измерения, чтобы решить проблемы дисбаланса шайбы относительно узла винт-объект. Измерения в нескольких положениях могут также обеспечить информацию о натяжении по периметру, чтобы определить, имеет ли какая-нибудь конкретная часть шайбы/винта какие-либо разрушения.
Шайба предпочтительно выполнена из материала, имеющего механические свойства, пригодные для того диапазона напряжений, которые будут возникать, и долгосрочную стабильность, чтобы ее можно было использовать в течение достаточного времени. Предпочтительно использовать металлический материал с подходящими характеристиками, например нержавеющую сталь, алюминий, железо, медь, латунь, титан и т.д. Шайбу можно снабдить уменьшающим окисление покрытием или какой-либо другой подходящей физической защитой.
Рисунок можно реализовать путем непосредственного нанесения на шайбу методом электроосаждения, лазерного нанесения, механического нанесения, и т.д., или его можно создать на отдельной пленке, накладываемой на шайбу (например, печатный рисунок на пленке из пластика или металла, приклеенной к шайбе).
Можно также измерять крутящий момент на шайбе или винте посредством измерения углового искажения рисунка.
Рисунок можно выполнить на стороне головки винта в положении, близком к объекту, там где в определенных условиях может возникнуть напряжение.
Фиг.3 схематически иллюстрирует пример применения изобретения для измерения крутящего момента (измеритель крутящего момента). Вал 31 имеет две группы рисунков 32, 32', расположенных на расстоянии друг от друга. Камера 33, 33' (факультативно снабженная средством для анализа, например электронным и/или вычислительным устройством) расположена у каждой группы рисунков для определения положения рисунка относительно другой группы рисунков. Если вал подвергается воздействию крутящего момента, то два рисунка будут иметь угловой сдвиг относительно друг друга. Если эти две камеры синхронизированы по времени, можно определить эту угловую разность и вывести крутящий момент на валу 31. В альтернативном варианте можно использовать единственную камеру, если она выполнена с возможностью захвата достаточно большого изображения, позволяющего вместить оба рисунка. В другом варианте одна камера используется для захвата изображения одной группы рисунков, и если крутящий момент достаточно большой или камера позволяет обеспечить требуемую чувствительность, разрешение и/или диапазон измерений, то точки в группе рисунков будут отклоняться друг от друга, свидетельствуя о наличии крутящего момента. Синхронизацию между системами камер удобно осуществлять по линии 34 связи. Следует отметить, что камера не ограничена обнаружением видимого света, а может быть выполнена с возможностью обнаружения какой-либо другой части электромагнитного спектра, например ультрафиолетовой или инфракрасной частей спектра.
Измеритель 30 крутящего момента может размещаться в одном корпусе 36 и может содержать одну или несколько камер 33, 33', интерфейс 37 для передачи измеренных значений и подшипники 35, 35' для опоры вала 31. Можно снабдить вал измерителем 30 крутящего момента, или же этот измеритель может устанавливать сам пользователь. Если вал снабжен измерителем крутящего момента, может быть предусмотрено средство для соединения (например, шлицевая муфта на одном или обоих концах в зависимости от применения) с другим валом, чтобы обеспечить подгонку к имеющимся частям узла, в котором применяется данный измеритель крутящего момента. Однако измеритель крутящего момента можно также установить вокруг имеющегося вала путем надвижки со скольжением измерителя крутящего момента на вал, который снабжен подходящим рисунком.
Анализ изображений может выполняться в камерах или в отдельном вычислительном устройстве (не показано).
Там, где интерес представляет измерение крутящего момента, может быть целесообразным использовать более одной камеры в зависимости от требуемого разрешения. Кроме того, настоящее изобретение позволяет получать дополнительную информацию об измеряемой системе, например о положении объекта, на котором измеряется крутящий момент, или о скорости вращения объекта. При использовании нескольких камер система может обеспечить информацию о поступательном движении вала по осям x, y, и z относительно камер. Несколько камер предпочтительно устанавливают с угловой разностью относительно друг друга, как видно на фиг.3B, где камеры 33 и 33' разнесены приблизительно на 45 градусов вокруг вала 31. Этот угол может составлять от 0 до 360 градусов.
Фиг.4 иллюстрирует способ измерения напряжения в объекте в варианте, когда напряжение измеряется периодически, например, при периодическом введении полевого зонда и его удалении между измерениями.
Фиг.4, 41. Обеспечивают рисунок на объекте в положении, в котором вызванное натяжение приведет к деформации.
Фиг.4, 42. Подвергают объект натяжению.
Фиг.4, 43. Измеряют исходное напряжение после воздействия на объект напряжением и/или во время применения натяжения путем получения одного или нескольких изображений рисунка, используя описанное выше устройство обнаружения напряжения. Анализируют изображение и факультативно сохраняют положение частей рисунка. Однако следует отметить, что рисунок может быть сформирован с известным расстоянием между его частями, тогда нет необходимости сохранять информацию для обнаружения напряжения, однако в любом случае это может быть интересно, так как позволяет определять разницу вызванного напряжения во времени.
Фиг.4, 44. Удаляют зонд.
Фиг.4, 45. Через некоторое подходящее время возвращаются и снова измеряют рисунок, чтобы определить наличие изменения и величину деформации.
Часть изобретения относится к анализу изображения, полученного из камеры. Этот анализ предпочтительно выполняется программой в вычислительном устройстве, таком как микропроцессор, программируемая пользователем вентильная матрица (FPGA), специализированная интегральная схема (ASIC), ПК, или подобное устройство. На фиг.5 показан пример такого вычислительного устройства 500 с процессором 501 и памятью 502 для хранения программ, результатов, и/или промежуточных значений. Память может быть энергозависимой или энергонезависимой или их комбинацией. Память может быть по меньшей мере одной из ОЗУ, электрически перепрограммируемого ПЗУ, электрически стираемого программируемого ПЗУ, флеш-карты, жесткого диска, карты памяти, или аналогичным запоминающим устройством, как будет понятно специалистам.
Вычислительное устройство может также содержать интерфейс 503 датчика и коммуникационный интерфейс 504. Интерфейс датчика предназначен для связи с камерой и может также принимать сигналы от других представляющих интерес датчиков для получения от них данных. Эти датчики могут, например, определять температуру, влажность, магнитное и/или электрическое поле, скорость, скорость вращения и т.п. Коммуникационный интерфейс может осуществлять связь с другими устройствами через коммуникационный протокол (например, Ethernet с использованием IP, RS232, RS485, 12C, шину CAN, GPIB, HPIB, VXI, PXI, ISA, Firewire, USB, IDE, версии PCI, версии SCSI и VME) для обмена данными и сигналами управления. Пользователь может осуществлять связь с вычислительным устройством 500 с ПК, например, для снятия показаний с устройства 500 и для установки устройства 500 на измерение, установки диапазона измерений, чувствительности, характеристик отсчета времени и т.д., как будет понятно специалистам. Вычислительное устройство может быть отдельным устройством, предназначенным специально для использования в применениях согласно настоящему изобретению, или может быть частью какого-то другого устройства, такого как персональный цифровой секретарь (PDA) или мобильный телефон.
Вычислительное устройство 500 может также содержать блок прямого пользовательского интерфейса с использованием пользовательского интерфейса, расположенного на устройстве, например, сенсорного экрана, присоединенного к вычислительному устройству, или кнопок, и/или другие подобные механические интерфейсные устройства, известные специалистам.
Вычислительное устройство 500 может быть выполнено с возможностью связи с центральным сервером для загрузки данных и/или приема калибровочных данных для измеряемого объекта.
Узлы рисунка могут иметь любую подходящую форму для цифрового обнаружения геометрического центра формы, но предпочтительно содержат круги 600 с незаполненными центральными частями (как видно на фиг.6), т.е. точки рисунка с заполненным кругом вокруг незаполненной центральной области. Преимущество наличия узла рисунка с такими характеристиками состоит в том, что алгоритм, используемый для определения положения, имеет четыре области сдвига контраста для измерения (на фиг.6 стрелка 601 показывает направление анализа): область 602, проходящая снаружи круга в заполненную область, область 603, выходящая из заполненной области и входящая в незаполненную центральную часть, область 604, выходящая из незаполненной центральной части в заполненный круг на противоположной стороне относительно первоначального обнаружения, и область 605 на выходе из заполненной части круга снаружи этой части рисунка. Однако следует понимать, что можно использовать и другие геометрические формы как с заполненными, так и незаполненными центральными частями, например квадраты, треугольники или любые другие формы. Анализ для определения геометрического центра можно выполнять в одном или нескольких направлениях анализа, в зависимости от того, какой тип применения изобретения используется.
Кроме того, рисунок может также содержать информационные точки, расположенные относительно каждой узловой точки рисунка. Информация может быть закодирована в группе информационных точек, например, группа рисунка может содержать множество точек одинакового или разного характера (или их комбинацию) и относительное положение относительно друг друга (отсутствие точки в группе информационных точек можно также рассматривать как информационную точку). Информационные точки могут представлять информацию о положении узловой точки относительно других узловых точек (например, давая возможность получить абсолютное положение каждой узловой точки, или обеспечивая информацию о расстоянии между соседними узловыми точками в ненапряженном состоянии (нет нужды сохранять такие значения центрально или локально) или другую калибровочную информацию, представляющую интерес (например, информацию, относящуюся к любым нелинейным эффектам в наложении рисунка на объект, эффектам камеры, эффектам напряжения, например, если вызванное напряжение не является линейным во всех направлениях).
Процедура обеспечения таких информационных точек, связанных с калибровкой, может заключаться в обеспечении узловых точек на объекте, измерении расстояния между каждой смежной узловой точкой, и обеспечении информационных точек с этой информацией на объекте.
Фиг.8 иллюстрирует альтернативный вариант, в котором гайка 800 имеет комбинированную головку 801 гайки для приема затягивающего прибора и шайбовую часть 804, снабженную рисунком 802. Напряжение передается через шайбовую часть, следовательно, напряжение можно обнаружить с помощью рисунка 802.
Настоящее изобретение может найти применение во множестве конкретных ситуаций, таких как:
1. Измерение крутящего момента на валу, идущем от электродвигателя (датчик может быть встроен в корпус электродвигателя).
2. В связи с подшипниками, например, в корпусе подшипника.
3. Измерение предварительно напряженных болтов, например, для определения напряжения в болтах в различные моменты и/или интервалы времени.
4. Измерение крутящего момента на валу рулевого колеса для использования при управлении электроэнергией.
5. Измерение напряжения в частях мостов, зданий, водяных дамб, уплотнений, рельсов (железнодорожных), ветряных мельниц, и частей автомобилей.
6. При измерении натяжения в крепежных элементах, например, на больших кранах.
7. На испытательных установках, используемых в лабораторных условиях, например, при испытании напряжения для определения прочности материалов на разрыв, и т.п.
Следует отметить, что слово "содержащий" не исключает наличия других элементов, кроме перечисленных, а упоминание элементов с использованием единственного числа не исключает наличия множества таких элементов. Также следует отметить, что ссылочные обозначения не ограничивают объем формулы изобретения, и что несколько средств, узлов или устройств может быть представлено одним и тем же аппаратным элементом, и что по меньшей мере часть изобретения может быть реализована аппаратными или программными средствами.
Описанные выше варианты осуществления изобретения представлены всего лишь как примеры и не ограничивают объем настоящего изобретения. Для специалистов будут очевидны другие решения, применения, цели и функции в рамках объема изобретения, охарактеризованного в формуле изобретения.
Реферат
Настоящее изобретение относится к системе контроля натяжения. Система контроля натяжения содержит по меньшей мере одну камеру для захвата по меньшей мере одного изображения по меньшей мере одного рисунка, расположенного на интересующем объекте. Причем рисунок содержит множество точек, каждая из которых расположена неподвижно на объекте, так что она следует за движением объекта. Также система содержит вычислительное устройство, выполненное с возможностью анализа захваченного изображения для обнаружения положения каждой точки рисунка с помощью алгоритма анализа изображения, позволяющего определить геометрический центр точки посредством обнаружения контраста, определения расстояния между, по меньшей мере, двумя частями рисунка, и вычисления натяжения, вызванного в объекте, с использованием контрольного значения расстояния между двумя частями рисунка, когда объект находится в механически ненапряженном состоянии. Технический результат - измерение натяжения одновременно в нескольких направлениях, возможность замерять с помощью одного и того же устройства обнаружения в нескольких местах и получить геометрический профиль напряжения. 3 н. и 12 з.п. ф-лы, 8 ил.
Формула
объект, являющийся частью крепежного средства, закрепляющего первый объект относительно второго объекта, снабженный по меньшей мере одним рисунком, расположенным на поверхности упомянутого объекта и содержащим части рисунка, расположенные относительно друг друга с расстоянием между частями рисунка в линейном масштабе, пригодном для обнаружения натяжения в пределах заранее определенного диапазона и разрешения, при этом части рисунка содержат множество точек, и каждая из них расположена неподвижно на объекте;
по меньшей мере одну камеру (4, 33, 33', 701) для захвата по меньшей мере одного изображения по меньшей мере одного рисунка (3, 23, 32, 32', 704), расположенного на объекте (2, 22, 31, 707);
вычислительное устройство (500), выполненное с возможностью приема видеоинформации от по меньшей мере одной камеры;
при этом вычислительное устройство выполнено с возможностью анализа захваченного изображения для обнаружения положения каждой точки рисунка с помощью алгоритма анализа изображения, позволяющего определить геометрический центр точки посредством метода обнаружения контраста, определения расстояния между по меньшей мере двумя частями рисунка, и вычисления натяжения, вызванного в объекте, с использованием контрольного значения расстояния между двумя частями рисунка, когда объект находится в механически ненапряженном состоянии.
обеспечивают рисунок с изменением контраста, расположенный неподвижно на объекте, являющемся частью крепежного средства;
захватывают по меньшей мере одно изображение рисунка, используя устройство захвата изображения;
анализируют рисунок для определения геометрических центров частей рисунка, используя процесс анализа изображения;
определяют расстояние между устройством захвата изображения и рисунком;
определяют расстояние между по меньшей мере двумя частями рисунка, используя анализ изображения и определенное расстояние между устройством захвата изображения и рисунком;
получают расстояние между двумя частями рисунка в незатянутом состоянии, используя контрольное значение;
вычисляют натяжение в объекте как функцию измеренного и вычисленного расстояний.
Комментарии